1. Область техники
Изобретение относится к области добычи жидких полезных ископаемых, в основном, в нефтедобывающей промышленности, и может быть использовано при глубинно-насосной эксплуатации, в частности, нефтяных скважин.
2. Уровень техники
Известны способ добычи нефти с помощью погружного насоса с одновременной очисткой колонны насосно-компрессорных труб летающим скребком и установка для его осуществления (патент RU (11) 2217578, МПК Е21В 43/00, Е21В 37/02).
В способе летающий скребок перемещается вверх под действием потока жидкости и при этом очищает колонну от отложений. Способ ориентирован на непрерывную добычу жидкости.
Недостатки способа - высокая функциональная и аппаратная избыточность для циклического режима и возникающая проблема координации циклов добычи нефти и циклов очистки колонн.
Известен способ минимизации расходов электроэнергии при обеспечении заданного дебита жидкости, реализующий циклический режим работы (патент RU 2352768 С2, МПК 7 Е21В 43/00), при котором осуществляют перекачку жидкости в систему нефтесбора насосом в циклическом режиме с выбором насоса откачки, производительность которого выше номинального дебита, при выключенном оборудовании измеряют кривую восстановления давления, по которой определяют максимально допустимое время простоя оборудования - время накопления жидкости для последующей откачки.
Недостаток способа состоит в том, что он не предусматривает одновременно с добычей нефти выполнение процесса очистки колонны насосно-компрессорного оборудования от парафиновых и других отложений, которые осаждаются на стенках колонны в верхней ее части, создают препятствия движению жидкости и с течением времени могут полностью его остановить.
Известны станции управления погружными двигателями, например устройство управления по патенту RU 2352768 С2, МПК 7 Е21В 43/00, включающее блок измерителя, ключ, блок управления, модем, причем один вход ключа связан с силовой электросетью, другой - с выходом блока управления, выход ключа соединен с питанием электропривода насоса и входом блока измерителя, выход которого соединен блоком управления, а выход последнего - со входом модема.
Недостаток устройства - отсутствие возможности очистки насосно-компрессорных труб от парафиновых и иных отложений.
Известен принятый за наиболее близкий аналог, как в части способа, так и в части устройства «Способ очистки колонны насосно-компрессорных труб при добыче нефти механизированным способом» (патент RU (11) 2157447, Е21В 37/02), при котором очищают внутренние поверхности насосно-компрессорных труб летающим скребком, фиксируют нижнее положение зоны очистки стоп-якорем, фиксируют верхнее положение зоны очистки упором, размещенным в устье скважины, перемещают летающий скребок вверх потоком добываемой жидкости (для очистки), перемещают летающий скребок вниз под действием гравитационных сил. В способе использовано устройство управления, содержащее станцию управления, при этом перемещение скребка обеспечивают включением и выключением погружного двигателя на заданные интервалы времени с помощью станции управления.
Недостаток способа и устройства заключается в том, что в нем не предусмотрены действия по определению такой области значений параметров добывающей установки, для которой полностью реализуется очистка. В итоге, из-за отсутствия указаний о значениях параметров установки не гарантируется полное прохождение скребка по всей длине зоны очистки, т.е. не гарантируется полная очистка при нештатном состоянии. Способом также не предусмотрен текущий контроль очистки в реальном времени без демонтажа добывающей установки.
3. Сущность изобретения
3.1. Задача
Техническая задача состоит в обеспечении в каждом цикле полного прохождения скребка по всей длине зоны очистки с контролем прохождения скребка в реальном времени.
Технический результат заключается в обеспечении очистки по всей длине зоны очистки в каждом цикле перемещением скребка по всему заданному участку трубы для широкой области значений технологических параметров и режимов добывающей установки в реальном времени.
3.2. Перечень фигур и чертежей
На фиг.1 приведена блок-схема технологической установки; на фиг.2 - блок-схема устройства управления; на фиг.3 приведена зависимость времени откачки от производительности насосной установки при различных объемах сектора очистки; на фиг.4 - временные диаграммы контроля откачки в цикле работы насосного оборудования с кодами состояния: 4а - цикл работы оборудования, 4б - штатное состояние - скребок находится в режиме штатного состояния, при котором циклически опускается на стоп-якорь и поднимается до устья (с фиксированием удара в допустимом интервале), 4в - нештатное состояние - скребок не достигает штатного состояния и не опускается на стоп-якорь, 4г - нештатное состояние - скребок не достигает штатного состояния и не поднимается (не возвращается) до устья).
На всех фигурах приняты единые обозначения:
1 - станция управления, 2 - сигнализатор ударных воздействий, 3 - скважина, 4 - устье скважины, 5 - верхний ограничитель хода скребка (верхний упор), 6 - сектор очистки от отложений смол, 7 - летающий скребок, 8 - стоп-якорь, 9 - насосное оборудование, 10 - ключ, 11 - измеритель тока, 12 - блок управления, 13 - модем, 14 - датчик давления, 15 - датчик ударов, 16 - микроконтроллер, 17 - первый вход ключа 10, 18 - второй вход ключа 10, 19 - выход ключа 10, 20 - шина питания электропривода насоса, 21 - выход измерителя тока 11, 22 - первый вход блока управления 12, 23 - канал информационного взаимодействия, 24 - вход датчика давления 14, 25 - вход датчика ударов 15, 26 - выход датчика давления 14, 27 - выход датчика ударов, 28 - выход микроконтороллера, 29 - второй вход блока управления 12; S - площадь поперечного сечения трубопровода, L - глубина сектора очистки, Тп - длительность контрольного интервала, Тн - длительность фазы накопления. То -длительность фазы откачки, Тс - сигнал ударного воздействия, tx - положение сигнала начала фазы откачки, to - положение сигнала окончания фазы откачки, tп - текущее положение сигнала удара, (tx-tп) - нештатное положение сигнала удара во времени, (tп-to) - штатное положение сигнала удара во времени.
3.3. Отличительные признаки
В способе, в отличие от известного, устанавливают соотношение объема зоны очистки и объема жидкости, накапливаемой в затрубном пространстве в фазе накопления цикла по условию превышения накапливаемого объема над объемом зоны очистки, очистку осуществляют с контролем процесса очистки по наличию и величине сдвига сигнала ударного воздействия скребка на устье скважины в фазе откачки каждого цикла, по результатам контроля при обнаружении нештатного состояния увеличивают время накопления до обнаружения штатного состояния, при увеличении времени накопления сверх заданного максимального значения и сохранении при этом нештатного состояния передают сигнал - признак аварии, на терминал диспетчера.
При этом, в частности, для заданных значений площади поперечного сечения трубопровода (S), глубины сектора очистки (L), объема сектора очистки (Vco), суточного дебита жидкости (D), средней скорости притока жидкости (Q):
- регулируют, при фиксированном объеме зоны очистки, объем жидкости, накапливаемой в затрубном пространстве в фазе накопления по зависимости:
 ,
,
где Vзп - объем жидкости, накапливаемый в затрубном пространстве в фазе накопления;
Q - средняя скорость притока жидкости (м3/час),
Тн - длительность фазы накопления цикла, (час);
- устанавливают постоянное значение объема жидкости, накапливаемого в затрубном пространстве в фазе накопления, и регулируют объем зоны очистки по зависимости:
Vco=L×S,
где Vco - объем сектора очистки (м3),
L - глубина сектора очистки (м),
S - площадь поперечного сечения трубопровода (м2);
- регулируют совместно объем жидкости, накапливаемый в затрубном пространстве в фазе накопления, и объем зоны очистки;
- фиксируют в процессе контроля наличие сигнала ударного воздействия и его сдвиг относительно начала фазы откачки, состояние, когда сигнал присутствует и его сдвиг равен контрольному интервалу или больше, его оценивают как штатную работу, состояние, когда сигнал присутствует, но его сдвиг меньше контрольного интервала, оценивают как нештатную ситуацию - неполную очистку нижней части сектора очистки (скребок при падении не достиг стоп-якоря и в момент пуска двигателя остановился в промежуточном положении), отсутствие сигнала оценивают как нештатную ситуацию - неполную очистку верхней части сектора (скребок в момент остановки двигателя не долетел до верхнего упора в устье скважины);
- устанавливают величину контрольного интервала по зависимости:
Тп=Тн/К, К=(Тн+То)/То,
где Тп - длительность контрольного интервала,
Тн - длительность фазы накопления,
То - длительность фазы откачки;
- в каждом цикле работы насосного оборудования измеряют величины Тн и То, по результатам измерений вычисляют величины К и Тп, а сравнение величины сдвига сигнала ударного воздействия с контрольным интервалом проводят после окончания вычисления длительности контрольного интервала Тп;
- контролируют с помощью датчика давления выполнение цикла (по изменению давления в буферной зоне устья), с помощью датчика ударов контролируют достижение скребком верхнего упора, а с помощью микроконтроллера измеряют длительность фазы накопления, длительность фазы откачки и величину сдвига сигнала датчика ударного воздействия относительно начала фазы откачки, по данным измерений вычисляют длительность контрольного интервала, сравнивают величину сдвига сигнала датчика ударов с контрольным интервалом и по результатам сравнения формируют код состояния процесса для устройства управления.
Известное устройство управления для реализации способа очистки насосно-компрессорных труб при циклическом режиме добычи жидкости в отличие от известного содержит датчик давления, датчик ударов и микроконтроллер, причем датчик давления подсоединен к патрубку трубопровода на устье скважины, датчик ударов жестко закреплен на корпусе устья скважины, выходы которых подключены к микроконтроллеру и к блоку управления.
3.4 Существо предложенного способа заключается в следующем.
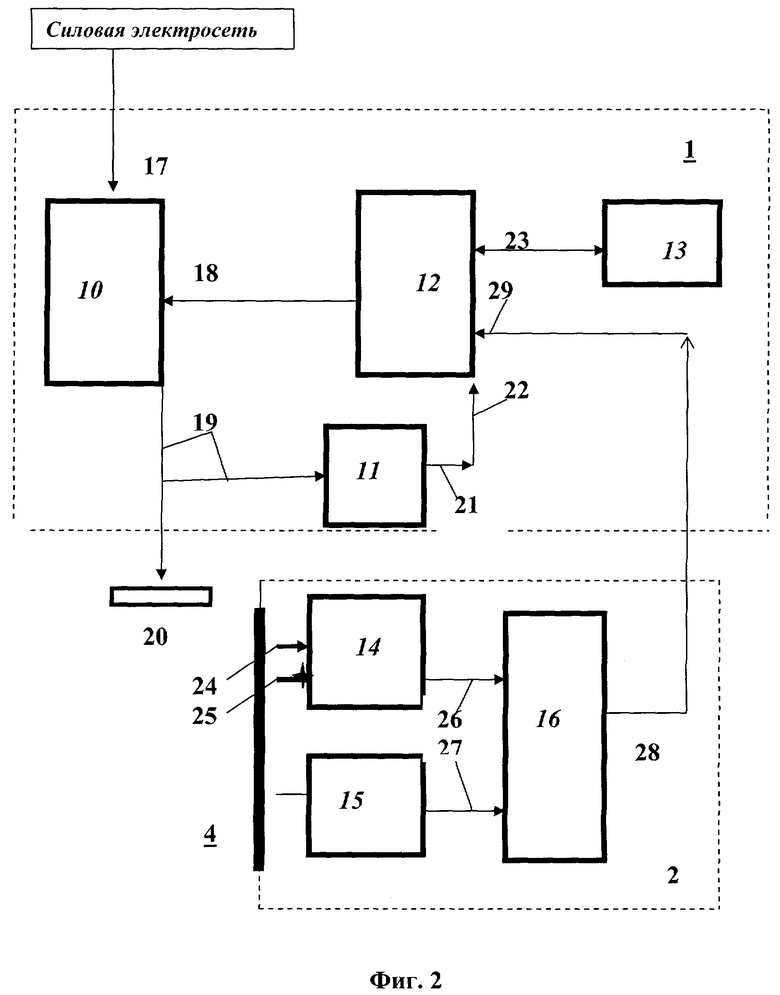
Для того чтобы переместить скребок 7 от стоп-якоря 8 до верхнего упора 5 устья 4 скважины 3 (фиг.1), необходимо откачать из скважины жидкость, объем которой соответствует глубине L сектора, подлежащего очистке (6), и площадь поперечного сечения S насосно-компрессорной трубы:

где Vco - объем сектора очистки (м3),
L - глубина сектора очистки (м),
S - площадь поперечного сечения трубопровода (м2).
Глубина сектора L определяется природными факторами и технологическими особенностями эксплуатации, поэтому объем можно регулировать, в основном, выбором сечения труб, т.е. фактически выбором трубы с приемлемым диаметром.
Для того чтобы такой объем можно было из скважины откачать, необходимо, чтобы в скважину за время накопления был обеспечен приток и накопление в затрубном пространстве, по меньшей мере, такого же объема жидкости.
Объем накапливаемой жидкости при определенном дебите жидкости определяется средней скоростью притока жидкости Q и интервалом времени накопления Тн (интервалом времени простоя оборудования).

где Vзп - объем жидкости, накапливаемый в затрубном пространстве в фазе накопления (м3),
Q - средняя скорость притока жидкости (м3/час),
Тн - длительность фазы накопления цикла (час).
Поскольку для скважины дебит (и, соответственно, средняя скорость притока) определяется возможностями пласта и технологическими параметрами эксплуатации скважины, регулировать накапливаемый объем наиболее просто можно временем накопления Тн, которое можно вычислить на основе выражения (2) по формуле:

где Vзп>Vco.
Если, по технологическим условиям глубина сектора очистки и диаметр трубы фиксированы, то сначала определяют по формуле (1) объем сектора очистки Vco, далее определяют среднюю скорость притока жидкости по зависимости:

где D - суточный дебит жидкости (м3/сутки).
Величину дебита определяют с помощью штатных замерных установок или задают по имеющимся данным.
Затем, по выражению (3) определяют необходимую величину времени накопления Тн.
Если, по технологическим условиям задана величина Тн, то по заданной величине Тн и известному дебиту определяют с помощью выражения (2) объем жидкости, накапливаемой в затрубном пространстве. Далее, используя выражение (1) и известную глубину сектора очистки L, определяют необходимое сечение трубы S и, соответственно, ее диаметр.
Если оказывается, что перечисленные подходы не дают приемлемых результатов (например, время Тн имеет неприемлемо высокое значение), то используют оба подхода совместно. Например, выбирают трубу с меньшим сечением S, тем самым уменьшают объем сектора очистки Vco и требуемый объем накопленной жидкости Vзп, что позволяет уменьшить время накопления Тн и довести его до приемлемой величины.
Определение значений параметров L, S, Vco, D, Q осуществляют до сборки установки. Параметру Тн (время накопления) до сборки присваивают начальное расчетное значение, а в процессе эксплуатации регулируют по мере изменения условий добычи. Такое регулирование необходимо, например, при изменении дебита скважины, или по требованиям технологии.
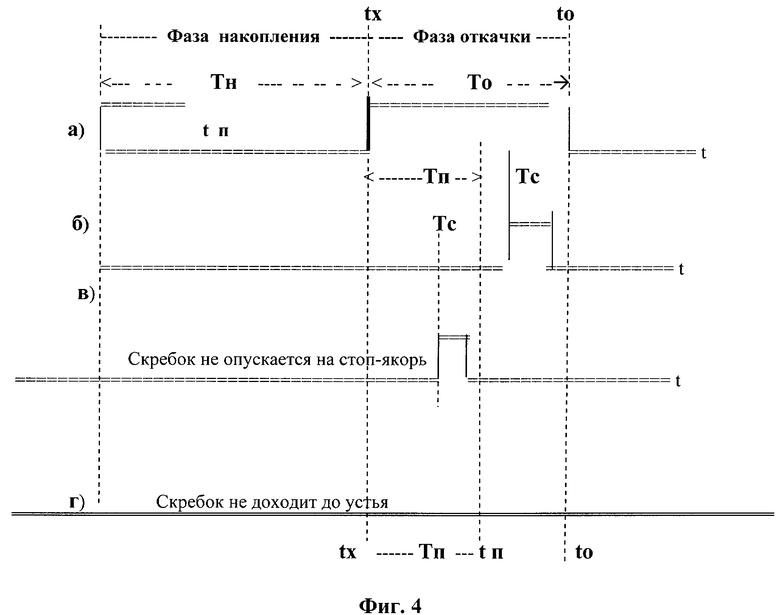
Далее, исходя из производственных требований по времени откачки жидкости и скорости движения скребка, выбирают тип насосной установки, производительность которой обеспечивает выполнение данных требований. Пример зависимости времени откачки от производительности установки для двух значений объема сектора очистки представлен на фиг.3.
Время откачки заданного объема определяет время Тп (фиг.4,а) подъема скребка на полную высоту, т.е. минимально необходимое время работы насоса. Реальное время откачки То (фиг.4,а) очистки должно быть больше этой величины, на тот случай, если скорость притока жидкости снизится. Время Тп используют далее в процессе контроля в качестве контрольного интервала.
После определения значений всех параметров собирают технологическую установку, механически закрепляют на устье датчик давления и датчики ударного воздействия и подключают датчики ко входам микроконтроллера, а выход микроконтроллера к блоку управления. После монтажа установки ее запускают в работу. В процессе работы с помощью датчиков и микроконтроллера ведут текущий контроль процесса очистки.
Контроль ведут путем сопоставления длительности интервала времени от начала фазы откачки до обнаружения сигнала ударного воздействия Тс с длительностью контрольного интервала Тп, характеризующего время полного прохождения скребка от стоп-якоря до верхнего упора на устье скважины.
Процесс контроля иллюстрируется с помощью диаграмм на фиг.4. На фиг.4,а показан цикл работы установки, включающий фазу накопления Тн и фазу откачки То. При нормальном ходе очистки сигнал ударного воздействия скребка на корпус устья скважины должен появляться в фазе откачки То цикла. Сдвиг момента обнаружения сигнала Тс от начала фазы откачки tx характеризует время перемещения скребка в фазе откачки. Если сдвиг превышает длительность контрольного интервала, то это оценивают как штатную работу (скребок перемещается от стоп-якоря до устья и выполняет полную очистку заданного сектора - фиг.4,б). Если сдвиг сигнала Тс меньше контрольного интервала (фиг.4,в), то это расценивают как признак того, что времени накопления недостаточно для полного возврата скребка. Скребок в этом случае не опустился до стоп-якоря и в следующем цикле не обработает нижнюю часть сектора очистки (нештатное состояние). Отсутствие сигнала Тс (фиг.4,г) расценивают как недостаток времени для подъема скребка на полную высоту - до устья, что в свою очередь означает, что скребок не обработал верхнюю часть сектора очистки (нештатное состояние). При обнаружении нештатного состояния последовательно увеличивают в заданных пределах время накопления Тн, до появления сигнала Тс в заданном интервале времени (фиг.4,б). Если, при максимально допустимых параметрах цикла, сигнал ударного воздействия так и не появится, то это расценивают как признак необходимости перехода к компромиссному значению Тн, которое обеспечивает полноту очистки и приемлемо по технологическим требованиям.
При обнаружении такого факта включают механизм дополнительного увеличения времени накопления Тн. Увеличение ведут до появления сигнала удара в заданном положении в фазе цикла. При этом за счет увеличения времени простоя насоса несколько снижается дебит жидкости, но сохраняется возможность совмещения процессов добычи и очистки.
Для обеспечения достоверности результатов контроля, при определении длительности контрольного интервала учитывают изменчивость условий добычи. Со временем может изменяться скорость притока жидкости, уровень ее обводненности, содержание газа и, в итоге, плотность, что в свою очередь приводит к изменению производительности насосного оборудования.
Для компенсации изменений длительность контрольного интервала устанавливают исходя из равенства поступающего объема и откачиваемого объема:
Vп=Vo,
где Vп - поступающий объем, определяемый выражением:
Vп=Q×(Тн+То), где Q - скорость притока жидкости,
Vo - откачиваемый объем:
Vo=Р×То,
где Р - производительность насосной установки (скорость откачки),
То - длительность фазы откачки.
В итоге равенство объемов характеризуется выражением:
Q×(Тн+То)=Р×То, откуда следует:

где 
Таким образом интервал откачки То включает две части:
Первая часть интервала (из выражения (6)):

- это интервал времени, необходимый для откачки накопленного объема. Этот интервал в дальнейшем используют для контроля процесса очистки в качестве интервала нештатной работы (интервал Тп на фиг.4).
Вторую часть интервала То (из выражения (6) - То/К) используют в качестве интервала штатной работы. Обнаружение сигнала датчика ударов Тс в этом интервале - признак штатного состояния. Интервал используется также для создания резервного объема на случай, если резко уменьшится скорость притока жидкости и накапливаемый объем в интервале Тн уменьшится ниже минимально допустимого уровня.
Величину К определяют из выражения (6):

При этом, учитывая изменчивость условий добычи, величины Тн и То измеряют для каждого цикла. Если, например, уменьшается скорость притока жидкости Q, то увеличивается величина К (выражение 7) и уменьшается величина контрольного интервала Тп. Уменьшение интервала Тп при этом соответствует уменьшению объема накапливаемой жидкости. Условие превышения накапливаемого объема над откачиваемым объемом при этом сохраняется - либо за счет начального «запаса» по времени Тн, либо за счет предусмотренного способом регулирования Тн.
В итоге ударное воздействие при штатном состоянии будет обнаружено уже после окончания контрольного интервала.
Если, например, снизится производительность насоса Р, то величина К уменьшится. Соответственно увеличится длительность контрольного интервала Тп. Увеличение длительности Тп в этом случае будет соответствовать снижению скорости движения скребка и соответственно увеличению времени обнаружения ударного воздействия.
В итоге обеспечивается адаптация длительности контрольного интервала к изменяющимся условиям добычи жидкости.
3.5. Контроль выполняют следующим образом.
В каждом цикле измеряют длительность интервала накопления, длительность интервала откачки То, вычисляют соотношение интервалов Тн и То (величину К), далее вычисляют длину интервала Тп (Тп=Тн/К) и сопоставляют измеренную длительность интервала от момента начала фазы откачки до появления сигнала ударного воздействия (Тc, фиг.4) с длительностью контрольного интервала Тп.
Помимо гарантированной очистки достоинство способа заключается в том, что реализация способа позволяет заранее, до монтажа установки определить диапазон значений параметров установки и циклов работы, обеспечивающий полную очистку колонны от парафиновых и иных отложений, при этом способ обеспечивает контроль процесса очистки и адаптацию к параметрам установки регулированием длительности фазы накопления цикла и длительности контрольного интервала.
4. Реализация способа
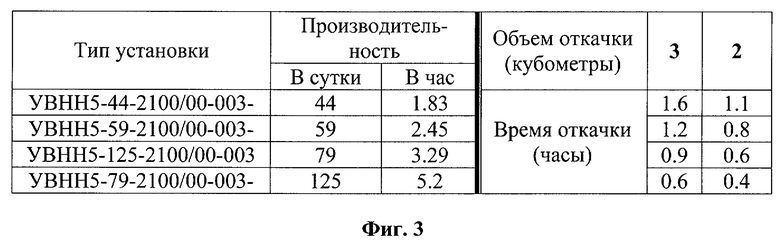
4.1. Способ реализуется с помощью устройства управления (фиг.2), в состав которого входят станция управления 1 и блок измерителя и сигнализатор ударных воздействий 2.
Станция управления 1 состоит из ключа 10, блока измерителя тока 11, блока управления 12, модема 13; блок измерителя и сигнализатор ударных воздействий 2 включает датчик давления 14, датчик ударов 15 и микроконтроллер 16. Первый вход 17 ключа 10 станции управления связан с силовой электросетью, второй вход 18 ключа 10 связан с выходом блока управления 12, выход 19 ключа 10 соединен с шиной питания 20 электропривода насоса и входом блока измерителя тока 11, выход которого 21 соединен с первым входом 22 блока управления 12, соединенного каналом информационного взаимодействия 23 с модемом 13.
Блок измерителя и сигнализатор ударных воздействий 2 образован соединением датчиков давления 14 и удара 15 с трубопроводом с одной стороны и с микроконтроллером 16 с другой стороны, который соединен со станцией управления 1. При этом датчик давления 14 своим входом 24 подсоединен к патрубку трубопровода на устье 4 скважины 3, датчик ударов 15 жестко закреплен (25) на корпусе устья 4 скважины 3, выходы 26, 27 датчика давления 14 и датчика удара 15 подключены, соответственно, к первому и второму входам микроконтроллера, выход 28 которого соединен со вторым входом 29 блока управления 12.
Ключ 10 осуществляет коммутацию напряжения силовой сети и обеспечивает включение и выключение питания двигателя насосного оборудования по команде от блока управления 12.
Блок измерителя 11 осуществляет контроль состояния насосного оборудования (включено-выключено) путем измерения и аналого-цифрового преобразования величины тока, потребляемого двигателем.
Блок управления 12 организует циклический режим работы насосного оборудования. Блок 12 задает величину интервала времени для фазы накопления цикла, включает и выключает двигатель с помощью ключа 10, получает и контролирует сигналы контроля очистки колонны от микроконтроллера 16, по результатам контроля регулирует время накопления, осуществляет информационное взаимодействие с удаленным диспетчерским пунктом через модем 13.
Модем 13 осуществляет физическое и логическое сопряжение блока управления с удаленным диспетчерским пунктом по стандартным каналам связи. Взаимодействие с диспетчерским пунктом обеспечивает возможность дистанционного изменения исходных данных для программ блока управления 12, в частности, для корректировки заданных значений.
Датчик давления 14 осуществляет непрерывное измерение давления в буферной зоне устья скважины и передает результаты измерений микроконтроллеру 16.
Датчик удара 15 фиксирует ударное воздействие на корпус устья скважины и передает обнаруженный сигнал микроконтроллеру 16.
Микроконтроллер 16 воспринимает сигналы датчиков 14 и 15, измеряет длительности фазы накопления, фазы очистки и сдвига сигнала датчика ударов относительно начала фазы очистки, вычисляет длительность контрольного интервала для каждого цикла, сравнивает измеренную длительность сдвига с вычисленной длительностью контрольного интервала и формирует по результатам сравнения коды - характеристики ситуаций, представленных на фиг.4.
4.2. Устройство по реализации способа работает следующим образом.
До начала рабочего процесса в блок управления 12 вводят данные о начальной величине длительности фазы накопления, диапазоне допустимых величин фазы накопления Тн - (Тн мин и Тн мах) и минимально допустимой величине тока, потребляемого двигателем («ток недогрузки»). Ввод данных осуществляется вручную, или дистанционно, через модем 13.
В процессе работы блок управления 12 отключает через ключ 10 насосную установку и выдерживает интервал накопления Тн. Далее включают насосную установку на время, необходимое для откачки накопленного объема. Выключение установки осуществляется по данным, поступающим от измерителя 11 - в момент достижения измеряемым значением тока минимально допустимой величины. Микроконтроллер 16 непрерывно воспринимает сигналы датчиков 14 и 15. Сигнал датчика давления 14 в цикле имеет после формирования вид, подобный изображению на фиг.4,а. В фазе накопления давление в буферной зоне устья имеет низкий уровень, а в фазе откачки - высокий. Сигнал датчика ударов 15 имеет характер затухающей волны. Микроконтроллер 16 фильтрует сигнал от фона и формирует его в виде стандартного импульса, показанного на фиг.4,б и 4,в. В каждом цикле микроконтроллер 16 измеряет и фиксирует длительность фазы накопления, фазы очистки и длительность интервала от начала фазы откачки до момента обнаружения удара. После окончания фазы откачки микроконтроллер вычисляет с помощью выражений (8) длительность контрольного интервала Тп, затем сравнивает длительность этого интервала с длительностью задержки момента обнаружения удара от начала фазы откачки. Интервал Тп делит всю длительность фазы откачки условно на 2 интервала - нештатного (tx-tп) и штатного (tп-to) положения сигнала удара во времени (фиг.4,а). Если сигнал удара появился в интервале (tп-to), микроконтроллер формирует код штатной работы (фиг.4,б). При появлении сигнала в интервале (tx-tп) (фиг.4,в) микроконтроллер формирует код нештатного состояния (скребок не опустился до стоп-якоря и в следующем цикле не обработает нижний участок сектора очистки). Если в течение цикла сигнал удара вообще не был зафиксирован (фиг.4,г), то формируется код этого нештатного состояния (скребок не достиг верхнего упора устья и не обработал верхнюю часть сектора очистки). После окончания фазы откачки и выполнения перечисленных операций микроконтроллер 16 передает код состояния блоку управления 12, чем обеспечивается контроль очистки в реальном времени.
Блок управления 12 формирует на эти коды следующую реакцию. Код штатного состояния ведет к сохранению уже установленной длительности фазы накопления. Коды нештатных ситуаций приводят к последовательному увеличению длительности фазы накопления в каждом цикле до появления от микроконтроллера 16 кода штатного состояния. Увеличение длительности фазы накопления ведут до достижения верхней границы диапазона длительностей (Тмах). Если увеличение длительности до верхнего предела не дает положительных результатов, то блок управления 12 через модем 13 передает на удаленный диспетчерский терминал сообщение о состоянии и запрашивает программу дальнейших действий, например, разрешение на увеличение граничной величины интервала Тмах. После приема разрешающего сообщения продолжают увеличивать длительность интервала накопления до появления сигнала ударного воздействия в интервале штатной работы (фиг.4,б), т.е. до обеспечения совмещения процессов добычи и очистки. Платой за совмещение является некоторое снижение дебита жидкости из-за увеличения длительностей интервалов простоя насоса. Если увеличение времени накопления и в этом случае не дает результата (это может произойти при появлении механического препятствия), то на терминал диспетчера через модем 13 передают сигнал - признак аварии.
4.3. Практическая реализация устройства осуществляется с помощью известных технических средств.
Ключ 10 реализуется с помощью силовых реле, транзисторных ключей, тиристорных регуляторов (для обеспечения плавного пуска двигателя).
Измеритель 11 реализуется с помощью трансформаторов тока и обычных цифровых и преобразующих микросхем. Возможна реализация измерителя с помощью стандартных электросчетчиков, например, счетчиков типа «Меркурий».
Блок управления 12 реализуется с помощью стандартных цифровых контроллеров, или одноплатных ЭВМ, например, ЭВМ типа «Вулкан»
Модем 13 реализуется на основе стандартных средств, например, GPRS-модемов.
Датчик давления 14 реализуется на основе промышленных приборов, например, датчиков типа Метран-100 или других.
Датчик ударов 15 реализуется, например, на основе высокочувствительных датчиков сейсморазведки.
Микроконтроллер 16 реализуется на основе микросхем промышленных ПИК-процессоров, имеющих в своем составе как вычислительные, так и преобразовательные ресурсы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ НЕФТЕОТДАЧИ ПЛАСТОВ В ПРОЦЕССЕ ДОБЫЧИ НЕФТИ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2441143C1 |
| СПОСОБ БОРЬБЫ С ПАРАФИНОВЫМИ ОТЛОЖЕНИЯМИ В НЕФТЕГАЗОВЫХ СКВАЖИНАХ | 2010 |
|
RU2438006C1 |
| СПОСОБ ПЕРИОДИЧЕСКОЙ ЭКСПЛУАТАЦИИ СКВАЖИНЫ С ПОМОЩЬЮ ПОГРУЖНОЙ УСТАНОВКИ ЭЛЕКТРОЦЕНТРОБЕЖНОГО НАСОСА | 2019 |
|
RU2706153C1 |
| Способ очистки внутренней полости скважинных труб | 2018 |
|
RU2731244C2 |
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗОК НА ОБЩИЕ РЕСУРСЫ ГРУППЫ ДОБЫВАЮЩИХ СКВАЖИН ПРИ ЦИКЛИЧЕСКОМ РЕЖИМЕ ИХ РАБОТЫ И УСТРОЙСТВО СЕТЕВОГО УПРАВЛЕНИЯ | 2006 |
|
RU2323333C2 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ КОЛОННЫ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ НЕФТЯНЫХ СКВАЖИН ОТ ПАРАФИНА | 2019 |
|
RU2717855C1 |
| СПОСОБ ОЧИСТКИ КОЛОННЫ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ СКВАЖИНЫ ОТ АСФАЛЬТОСМОЛОПАРАФИНОВЫХ ОТЛОЖЕНИЙ | 2015 |
|
RU2584192C1 |
| СПОСОБ МИНИМИЗАЦИИ РАСХОДОВ ЭЛЕКТРОЭНЕРГИИ ПРИ ОБЕСПЕЧЕНИИ ЗАДАННОГО ДЕБИТА ЖИДКОСТИ И УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2352768C2 |
| Способ добычи нефти с помощью погружного насоса с одновременной очисткой колонны насосно-компрессорных труб летающим скребком и установка для его осуществления | 2001 |
|
RU2217578C2 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ СКВАЖИННЫХ ЭЛЕКТРОРАЗРЯДНЫХ АППАРАТОВ | 2008 |
|
RU2382373C1 |
Группа изобретений относится к нефтедобывающей промышленности и может быть использовано при глубинно-насосной эксплуатации скважин. При осуществлении способа очищают поверхности насосно-компрессорных труб летающим скребком, фиксируют нижнее положение зоны очистки стоп-якорем, фиксируют верхнее положение зоны очистки упором, перемещают скребок вверх потоком жидкости, а вниз - под действием гравитационных сил. Устанавливают соотношение объема зоны очистки и объема жидкости, накапливаемой в затрубном пространстве в фазе накопления цикла по условию превышения накапливаемого объема над объемом зоны очистки. Контролируют процесс очистки по наличию и величине сдвига сигнала ударного воздействия скребка на устье скважины в фазе откачки каждого цикла. При обнаружении нештатной ситуации изменяют время накопления до достижения штатной ситуации. При увеличении времени накопления сверх заданного максимального значения и сохранения при этом нештатной ситуации передают сигнал - признак аварии на терминал диспетчера. Повышается эффективность и технологические возможности устройства очистки. 2 н. и 5 з.п. ф-лы, 4 ил.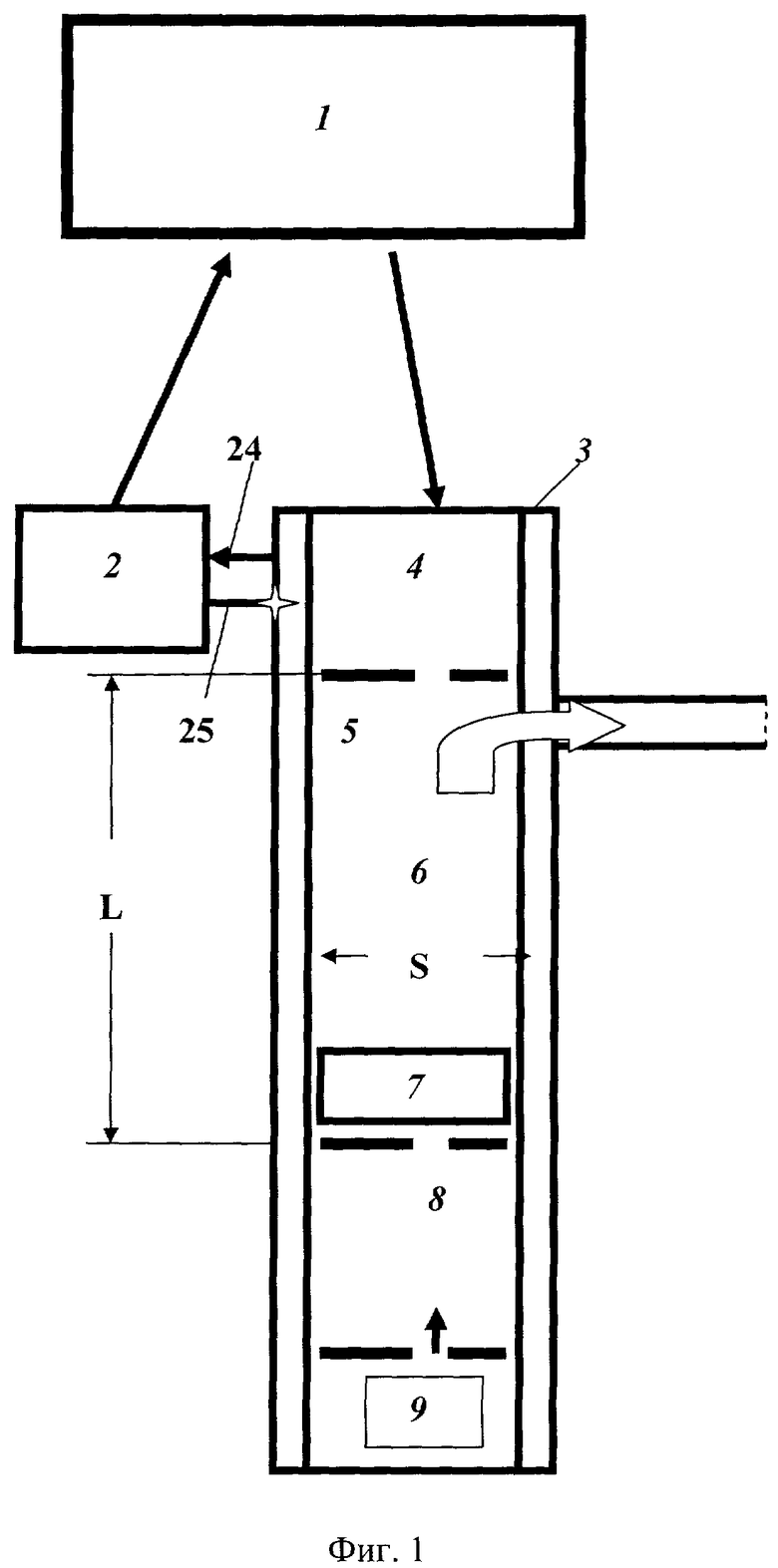
1. Способ очистки колонны насосно-компрессорных труб при циклическом режиме добычи жидкости, при котором очищают внутренние поверхности насосно-компрессорных труб летающим скребком, фиксируют нижнее положение зоны очистки стоп-якорем, фиксируют верхнее положение зоны очистки упором, размещенным в устье скважины, перемещают летающий скребок вверх потоком жидкости, перемещают летающий скребок вниз под действием гравитационных сил, отличающийся тем, что устанавливают соотношение объема зоны очистки и объема жидкости, накапливаемой в затрубном пространстве в фазе накопления цикла по условию превышения накапливаемого объема над объемом зоны очистки, контролируют процесс очистки по наличию и величине сдвига сигнала ударного воздействия скребка на устье скважины в фазе откачки каждого цикла, при обнаружении нештатной ситуации изменяют время накопления до достижения штатной ситуации, при увеличении времени накопления сверх заданного максимального значения и сохранении при этом нештатной ситуации передают сигнал - признак аварии на терминал диспетчера.
2. Способ по п.1, отличающийся тем, что при фиксированном объеме зоны очистки регулируют объем жидкости, накапливаемой в затрубном пространстве в фазе накопления по зависимости:
Vзп=Q·Тн,
где Vзп - объем жидкости, накапливаемый в затрубном пространстве в фазе накопления;
Q - средняя скорость притока жидкости (м3/ч);
Тн - длительность фазы накопления цикла, (ч).
3. Способ по п.1, отличающийся тем, что устанавливают постоянное значение объема жидкости, накапливаемого в затрубном пространстве в фазе накопления, и регулируют объем зоны очистки по зависимости
Vco=L·S,
где Vco - объем сектора очистки (м3);
L - глубина сектора очистки (м);
S - площадь поперечного сечения трубопровода (м2).
4. Способ по п.1, отличающийся тем, что регулируют совместно объем жидкости, накапливаемый в затрубном пространстве в фазе накопления, и объем зоны очистки.
5. Способ по п.1, отличающийся тем, что в процессе контроля фиксируют наличие сигнала ударного воздействия и его сдвиг относительно начала фазы откачки, ситуацию, когда сигнал присутствует и его сдвиг равен контрольному интервалу или больше его оценивают как штатную работу, ситуацию, когда сигнал присутствует, но его сдвиг меньше контрольного интервала, оценивают как нештатную ситуацию - неполную очистку нижней части сектора очистки отсутствие сигнала оценивают как нештатную ситуацию - неполную очистку верхней части сектора.
6. Способ по п.1, отличающийся тем, что величину контрольного интервала устанавливают по выражению
Тп=Тн/К, К=(Тн+То)/То,
где Тп - длительность контрольного интервала, ч;
Тн - длительность фазы накопления, ч;
То - длительность фазы откачки, ч,
в каждом цикле работы насосного оборудования измеряют величины Тн и То, по результатам измерений вычисляют величины К и Тп, а сравнение величины сдвига сигнала ударного воздействия с контрольным интервалом проводят после окончания вычисления длительности контрольного интервала Тп.
7. Устройство управления для реализации способа очистки насосно-компрессорных труб при циклическом режиме добычи жидкости, включающее станцию управления, блок измерителя и сигнализатор ударных воздействий, ключ, блок управления, модем, причем первый вход ключа связан с силовой электросетью, второй вход ключа связан с выходом блока управления, выход ключа соединен с шиной питания электропривода насоса и входом блока измерителя тока, выход которого соединен с первым входом блока управления, выход последнего соединен со входом модема, отличающееся тем, что устройство содержит датчик давления, датчик ударов и микроконтроллер, причем датчик давления своим входом подсоединен к патрубку трубопровода на устье скважины, датчик ударов жестко закреплен на корпусе устья скважины, выходы датчика давления и датчика удара подключены соответственно к входам микроконтроллера, выход которого соединен со вторым входом блока управления.
| СПОСОБ ОЧИСТКИ КОЛОННЫ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ ПРИ ДОБЫЧЕ НЕФТИ МЕХАНИЗИРОВАННЫМ СПОСОБОМ | 1997 |
|
RU2157447C2 |
| СПОСОБ МИНИМИЗАЦИИ РАСХОДОВ ЭЛЕКТРОЭНЕРГИИ ПРИ ОБЕСПЕЧЕНИИ ЗАДАННОГО ДЕБИТА ЖИДКОСТИ И УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2352768C2 |
| Устройство для опыления зерна | 1929 |
|
SU25328A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ДЕПАРАФИНИЗАЦИИ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ НЕФТЯНЫХ СКВАЖИН | 1992 |
|
RU2047762C1 |
| US 4007784 A, 15.02.1977. | |||

