ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к автоматическому обнаружению местоположения сосков животных в целях управления аппаратом машинного доения.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
В области машинного доения известно использование оптических датчиков для определения ориентации и местоположения сосков в пространстве, чтобы направлять доильный аппарат. Для формирования изображения сосков и определения их местоположения в пространстве используются лазерные оптические триангуляционные датчики. Свет проецируется в поле зрения, а отраженный свет визуализируется в камере, лежащей в плоскости проекции. Оптика, а также источник света помещены в корпус датчика, размеры которого должны соответствовать используемой оптике.
Корпус датчика обычно устанавливается на руке робота, которая управляется для получения полного поля зрения различных сосков, участвующих в процессе доения. Рука робота должна соответствовать массе и размеру датчика. Датчик должен формировать изображение относительно малой зоны между брюхом животного и верхом доильных стаканов. Учитывая размер корпуса датчика, диапазон его перемещения ограничен, что накладывает ограничение на качество изображений, которого можно добиться, особенно, если один сосок закрывает видимость другого.
Два соска на разных расстояниях, но изображения которых наложены, могут в зависимости от угла камеры казаться находящимися на одинаковом расстоянии. В таких случаях, для того чтобы отличить соски, может потребоваться манипулирование камерой, чтобы получить изображения под разными углами. Это является серьезной проблемой. Кроме того, либо поле зрения, либо проецируемый свет могут заслоняться.
В дополнение к необходимости получения полной видимости различных сосков, когда несколько сосков находятся на разных расстояниях и под разными углами относительно датчика, могут возникнуть неточности и в оценке местоположения сосков триангуляцией. Частично компенсировать эти неточности можно манипулированием руки робота, но для точной оценки расстояния требуются дополнительные расчеты.
Для того чтобы прикрепить доильные стаканы к соскам, крайне важно определить ориентацию и местоположение кончиков сосков в трехмерном пространстве. Триангуляционные устройства позволяют добиться этого благодаря использованию руки робота, перемещающей их в разные положения, и анализу результатов последовательных сканирований. Но во время сканирования животное и его соски не остаются неподвижными, а находятся в движении. Это приводит к ненадежному определению абсолютных местоположения и ориентации сосков.
Одно из средств учета движения животного - формировать изображение задних ног и принять, что движение задних ног аппроксимирует движение сосков. Однако этот подход имеет ограниченную полезность из-за ограниченной глубины резкости пространственного изображения нынешних оптических триангуляционных систем.
С подобными проблемами сталкиваются и системы стереоизображений. Обе камеры должны одновременно формировать изображение одного и того же соска, но использование двух камер повышает риск заслонения одного соска другим для одной из камер.
Ультразвуковые чувствительные системы, которые иногда используются в машинном доении, измеряют время пролета звуковых волн. Контур диаграммы направленности звуковых волн существенно ограничивает пространственное разрешение. Кроме того, на скорость звука влияют температура и влажность воздуха и скорости воздушных потоков, и отражение звука привносит шум, что необходимо учитывать при обработке изображения.
Целью настоящего изобретения является создание системы датчика сосков в системе машинного доения, которая устраняет вышеупомянутые недостатки и является компактной, легкой для манипулирования и эффективной.
Цели изобретения будут понятнее из последующего подробного описания предпочтительного варианта его осуществления.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В соответствии с одним аспектом предлагается использование источника света и двухмерной матричной камеры, имеющей несколько элементов отображения, которые могут отдельно выдавать данные о времени пролета в системе машинного доения. Как результат, по изображениям сосков можно получить трехмерные данные.
Преимущества этой системы заключаются в том, что она является очень компактной, очень легкой и не имеет недостатков ограниченной глубины резкости пространственного изображения и заслонения, присущих другим технологиям, используемым в области машинного доения.
В одном из аспектов предлагается использование в системе машинного доения, имеющей доильный аппарат для извлечения молока из нескольких сосков живого животного, источника света для освещения сосков и двухмерной матричной камеры, имеющей несколько элементов отображения, которые могут отдельно выдавать данные о времени пролета для захвата и выдачи данных для определения местоположения сосков в пространстве.
В другом аспекте предлагается система машинного доения, предназначенная для извлечения молока из нескольких сосков живого животного, содержащая подвижный аппарат, предназначенный для получения команд, характеризующих местоположение по меньшей мере одного из сосков, перемещения в это местоположение и закрепления по меньшей мере на одном из сосков для извлечения из него молока, источник света, предназначенный для освещения зоны, окружающей несколько сосков, двухмерную матричную камеру, имеющую несколько элементов отображения, которые могут отдельно выдавать данные о времени пролета, и электронное средство, предназначенное для захвата выходного сигнала матрицы и выдачи данных, характеризующих местоположение сосков.
В еще одном аспекте предлагается способ машинного доения по меньшей мере для одного соска из нескольких сосков живого животного, включающий следующие стадии: стадию, на которой устанавливают подвижный аппарат для получения команд, которыми характеризуют местоположение соска, перемещения в это местоположение и закрепления на этом соске для извлечения из него молока; стадию, на которой используют источник света для освещения зоны вокруг нескольких сосков; стадию, на которой используют двухмерную матричную камеру с несколькими элементами отображения, которыми могут отдельно выдавать данные о времени пролета для захвата изображения соска; стадию, на которой это изображение обрабатывают для получения трехмерной информации, которой характеризуют местоположение соска; стадию, на которой эту информацию используют для выдачи команд; и стадию, на которой аппарат перемещают для закрепления на соске.
Вышеприведенное описание было предназначено лишь как общее краткое описание и лишь некоторых аспектов изобретения. Оно не было предназначено для определения пределов или требований изобретения. Другие аспекты изобретения станут понятными из подробного описания предпочтительного варианта осуществления и формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже приводится подробное описание предпочтительного варианта изобретения со ссылками на прилагаемые чертежи, на которых:
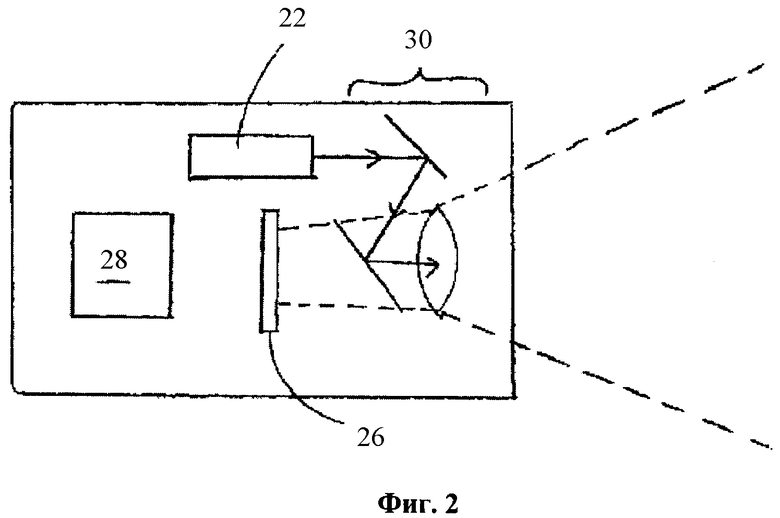
фиг.1 представляет собой общий вид системы по предпочтительному варианту осуществления, содержащей датчик времени пролета, который формирует изображение вымени, сосков и задней ноги;
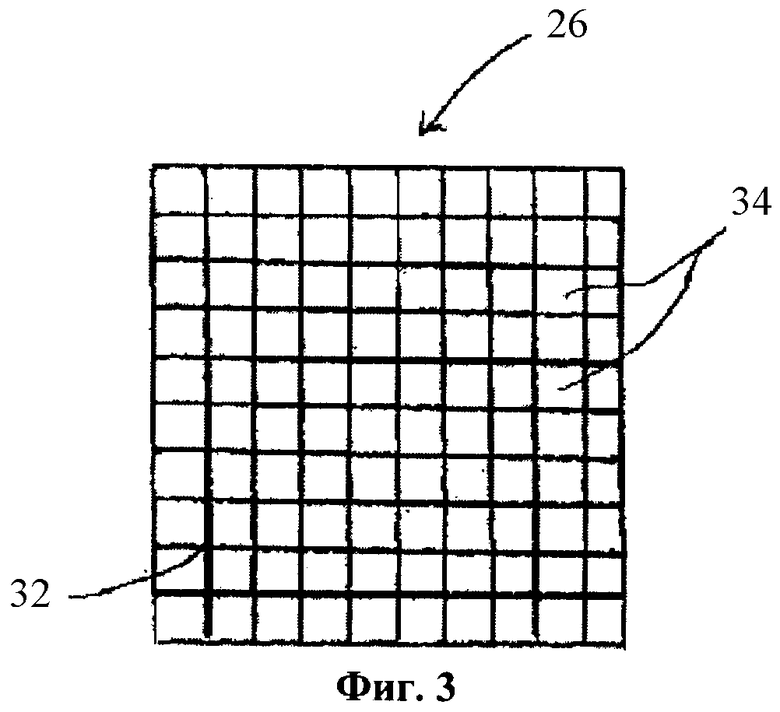
фиг.2 представляет собой схематический разрез датчика в соответствии с предпочтительным вариантом осуществления;
на фиг.3 представлена двухмерная матрица в соответствии с предпочтительным вариантом осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Фиг.1 иллюстрирует предпочтительный вариант осуществления изобретения. Корпус 10 датчика установлен на руке 12 робота и предназначен для определения местоположения и ориентации сосков 14 вымени 16. Выходной сигнал датчика используется для управления использованием аппарата машинного доения 18, который содержит доильные стаканы 20, также установленные на руке 12 робота. Доильный аппарат предназначен для получения команд, характеризующих местоположение сосков, перемещения руки робота в это местоположение для закрепления доильных стаканов на сосках.
Корпус 10 датчика содержит источник модулированного света 22, предназначенный для освещения всего поля зрения, окружающего вымя 16, соски 14 и задние ноги 24 животного. Как показано на фиг.2, корпус 10 датчика содержит камеру 26, электронное устройство 28 для управления, захвата и считывания изображений и соответствующую оптику 30.
Как показано схематически на фиг.3, камера 26 состоит из двухмерной матрицы 32 элементов отображения 34, каждый из которых может сообщать данные о времени пролета, синхронизированные с источником света, а также интенсивность. Хотя и относительно новые, эти камеры доступны и известны специалистам в области машинного зрения.
Изображение нескольких сосков захватывается на двухмерной матрице 32 и отображается как набор трехмерных данных (с использованием информации о времени пролета для определения дальности). Результирующие данные обрабатываются для точного представления местоположения сосков в трехмерном пространстве после коррекции на угловое положение. Эта информация о местоположении затем используется для выдачи доильному аппарату команды на перемещение руки 12 робота так, чтобы доильные стаканы 20 прикрепились по меньшей мере к одному соску 14.
Изобретение позволяет датчику формировать изображение доильных стаканов и сосков в одном поле зрения независимо от их расстояний от камеры и без необходимости сканировать поле зрения. Это упрощает управление роботом. Кроме того, при условии, что они не заслонены, в том же поле зрения могут отображаться задние ноги, что позволит отслеживать движение животного и точнее прикреплять доильные стаканы к соскам.
Кроме того, калибровка, необходимая для предлагаемой системы, меньше по сравнению с триангуляционными системами. Поскольку камера может отображать отверстия доильных стаканов и сосков на одном изображении, местоположение сосков становится относительным измерением относительно камеры, что дополнительно упрощает процесс прикрепления, поскольку нет необходимости в обмене данными об абсолютном местоположении между датчиком и устройством управления роботом.
Корпус 10 датчика может быть очень компактным, поскольку оптическое устройство имеет намного меньшие размеры, чем в триангуляционных системах. Корпус может быть размером, например, 135×45×32 мм, что также облегчает манипулирование рукой 12 робота, необходимое для получения не заслоненного вида сосков. В пределах ограниченного пространства между брюхом животного и кончиком доильных стаканов это обеспечивает преимущество над триангуляционными системами.
Определение времени пролета позволяет решить проблему ограниченной глубины резкости пространственного изображения, связанную триангуляционными системами обнаружения сосков, поскольку отпадает необходимость сканировать соски, чтобы получить надежные данные об их местоположении. Как результат, требуется меньше манипуляций рукой 12 робота, и местоположение нескольких сосков и задних ног на разных расстояниях и глубинах резкости можно надежно определить.
Понятно, что этот предпочтительный вариант осуществления описан лишь с целью иллюстрации принципов изобретения, и что возможны изменения этого предпочтительного варианта в пределах принципов, отраженных в данном описании и формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оценки пригодности коров к машинному доению | 1989 |
|
SU1720602A1 |
| АППАРАТ ДЛЯ ДОЕНИЯ И СБОРА МОЛОКА С СИСТЕМОЙ ЗАЩИТЫ МОЛОКОПРОВОДА | 2011 |
|
RU2583697C2 |
| АППАРАТ ДЛЯ ДОЕНИЯ И СБОРА МОЛОКА С СИСТЕМОЙ ЗАЩИТЫ МОЛОКОПРОВОДА | 2011 |
|
RU2676917C2 |
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2587561C2 |
| СПОСОБ МАШИННОГО ДОЕНИЯ | 1999 |
|
RU2157619C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И/ИЛИ ОРИЕНТАЦИИ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2013 |
|
RU2595621C2 |
| УСТРОЙСТВО ДЛЯ СТИМУЛЯЦИИ ВЫМЕНИ В ПРОЦЕССЕ ДОЕНИЯ | 2006 |
|
RU2354112C1 |
| ДОИЛЬНЫЙ АППАРАТ И ДОИЛЬНАЯ УСТАНОВКА, ИМЕЮЩАЯ ДАННЫЙ ДОИЛЬНЫЙ АППАРАТ, И СПОСОБ РАЗМЕЩЕНИЯ ДОИЛЬНОГО АППАРАТА | 2012 |
|
RU2555910C2 |
| СПОСОБ МАШИННОГО ДОЕНИЯ И ДОИЛЬНЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2737207C2 |
| СИСТЕМА И СПОСОБ ДОЕНИЯ ЖИВОТНЫХ | 2006 |
|
RU2404570C2 |
Изобретение относится к сельскому хозяйству. Предложенная система машинного доения содержит доильный аппарат, источник света для освещения сосков животного, связанный с доильным аппаратом, двухмерную матричную камеру. Камера имеет несколько элементов отображения, которые могут отдельно выдавать данные о времени пролета для определения дальности для захвата и выдачи данных в устройство обработки для определения местоположения сосков в пространстве. По второму варианту система дополнительно содержит подвижный аппарат, предназначенный для получения команд, характеризующих местоположение сосков, перемещение аппарата и закрепление его на сосках, и электронное средство для захвата выходного сигнала матрицы и выдачи данных, характеризующих местоположение сосков животного. Предложенный способ машинного доения заключается в следующем. Устанавливают подвижный аппарат, используют источник света для освещения зоны вокруг сосков животного и двухмерную матричную камеру, после чего обрабатывают данные для получения трехмерной информации. Затем указанную информацию используют для выдачи команд для перемещения и закрепления подвижного аппарата на сосках, закрепляют указанный аппарат на вымени животного. Изобретение обеспечивает повышение эффективности работы доильного аппарата. 3 н.п. ф-лы, 3 ил.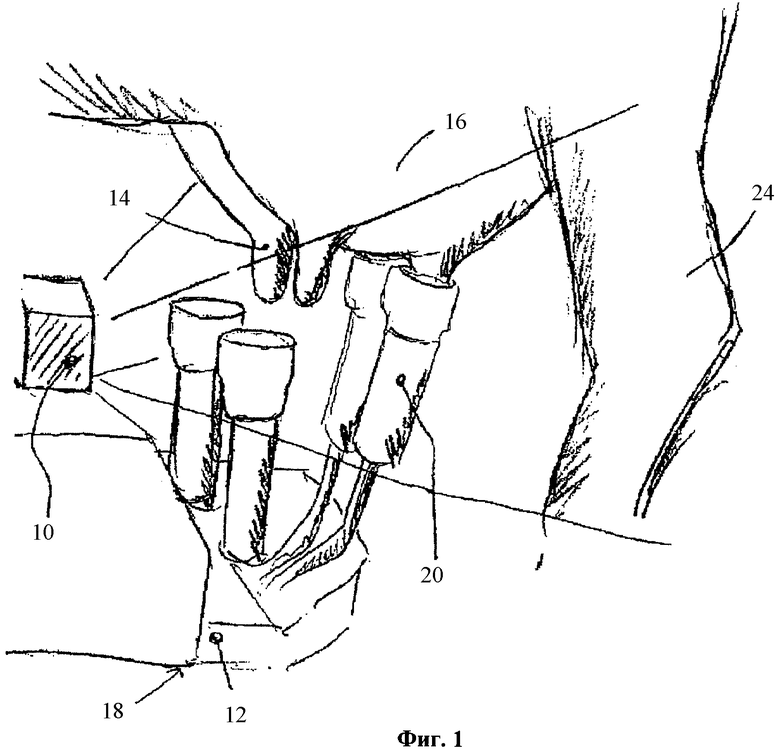
1. Система машинного доения, имеющая доильный аппарат для извлечения молока из нескольких сосков живого животного, источник света для освещения указанных сосков, связанный с указанным доильным аппаратом, и двухмерную матричную камеру, имеющую несколько элементов отображения, которые могут отдельно выдавать данные о времени пролета для захвата и выдачи данных в устройство обработки, связанное с указанным доильным аппаратом, для определения местоположения указанных сосков в трех измерениях.
2. Система машинного доения, предназначенная для извлечения молока из нескольких сосков живого животного, содержащая
подвижный аппарат, предназначенный для получения команд, характеризующих местоположение, по меньшей мере, одного из указанных сосков, перемещение в указанное местоположение и закрепление, по меньшей мере, на одном из указанных сосков для извлечения из него молока; источник света, связанный с подвижным аппаратом, предназначенный для освещения зоны, окружающей указанные несколько сосков; двухмерную матричную камеру, связанную с подвижным аппаратом, имеющую несколько элементов отображения, которые могут отдельно выдавать данные о времени пролета; электронное средство, связанное с подвижным аппаратом, предназначенное для захвата выходного сигнала указанной матрицы и выдачи данных, характеризующих указанное местоположение.
3. Способ машинного доения, по меньшей мере, для одного соска из нескольких сосков живого животного, включающий следующие стадии:
стадию, на которой устанавливают подвижный аппарат для получения команд, которыми характеризуют местоположение указанного соска, перемещение в указанное местоположение и закрепление на указанном соске для извлечения из него молока;
стадию, на которой используют источник света для освещения зоны вокруг указанных нескольких сосков;
стадию, на которой используют двухмерную матричную камеру с несколькими элементами отображения, которые могут отдельно выдавать данные о времени пролета для захвата изображения указанного соска;
стадию, на которой указанное изображение обрабатывают для получения трехмерной информации, которой характеризуют указанное местоположение;
стадию, на которой указанную информацию используют для выдачи указанных команд; и
стадию, на которой указанный аппарат перемещают для закрепления на указанном соске.
| US 6234109 B1, 22.05.2001 | |||
| Устройство для распределения мощности между мотор-колесами скрепера | 1987 |
|
SU1537775A2 |
| Устройство виброзащиты кабины машиниста экскаватора | 1987 |
|
SU1537774A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ упаковки и консервации изделий со сложнорельефной поверхностью | 1980 |
|
SU880889A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ДОИЛЬНЫХ СТАКАНОВ | 1997 |
|
RU2143800C1 |
| US 5020477 A, 04.06.1991. | |||

