Предлагаемое изобретение относится к устройствам управления воднотранспортными средствами и может быть использовано в робототехнике.
Известно устройство [Подводный робот. Патент РСФСР №1434675, Кл. В63 В 21/00], содержащее корпус, выполненный из двух герметичных цилиндров, соединенных между собой в кормовой части, и П-образного манипулятора, штанги которого закреплены между герметичными цилиндрами в шарнирах с возможностью вращения вокруг поперечной оси и радиального перемещения относительно нее. Захваты на концах штанг выполнены двухстворчатыми и установлены шарнирно с возможностью вращения вокруг своей оси, параллельной поперечной оси робота. Изобретение относится к техническим средствам проведения подводно-технических и аварийно-спасательных работ.
Недостатком данного устройства является отсутствие герметичного отсека для перемещения объектов.
Задачей изобретения является упрощение конструкции и расширение технологических возможностей воднотранспортных устройств для перемещения объектов.
Поставленная задача решается следующим образом. Предлагаемое устройство содержит корпус, закрытый снизу защитной сеткой, с килем, обзорную часть с ограждением, к которой крепится фонарь и мачта, с осью, установленной в корпусе, на которой смонтированы водные колеса, вращающиеся в горизонтальных плоскостях посредством приводного механизма и электропривода с источником питания, причем приводной механизм закрыт крышкой, смонтирован на оси, установленной в центре корпуса, и связывает валы двух электродвигателей постоянного тока с двумя втулками верхнего и нижнего полых водных колес посредством одетых на валы и втулки четырех конических зубчатых колес, причем, для изменения углов поворота лопастей весел, каждая из двух замкнутых кольцевых зубчатых кинематических цепей расположена внутри верхнего и нижнего полых водных колес и состоит из восьми конических шестерен, причем четыре из них установлены на веслах и кинематически связаны с шестернями, одетыми на валы двух шаговых электродвигателей, закрепленных внутри верхнего и нижнего водных колес, а выходы пульта оператора подключены к входам вычислительного блока, выходы которого подключены к входам контроллера электропривода постоянного тока и контроллера шагового электропривода, причем выходы последних связаны с входами двух электродвигателей постоянного тока и двух шаговых электродвигателей.
Сущность представленного технического решения поясняется чертежами (фиг.1, фиг.2, фиг.3, фиг.4). Предложенный механизм устройства содержит: корпус 1, мачту 2, фонарь 3, обзорную часть 4, ограждение 5, лопасти весел 6, 8, верхнее водное колесо 7, нижнее водное колесо 9, ось 10, крышку 11, электродвигатели постоянного тока 12, 13, источник питания 14, защитную сетку 15, киль 16, шаговые электродвигатели 17, 20, шестерни 18, 21, весла 19, 22, валы 23, 24, втулки 25, 27, зубчатые колеса втулок 26, 28, зубчатые колеса валов 29, 30, пульт оператора 31, блок вычислений 32, контроллер электропривода постоянного тока 33 и контроллер шагового электропривода 34.
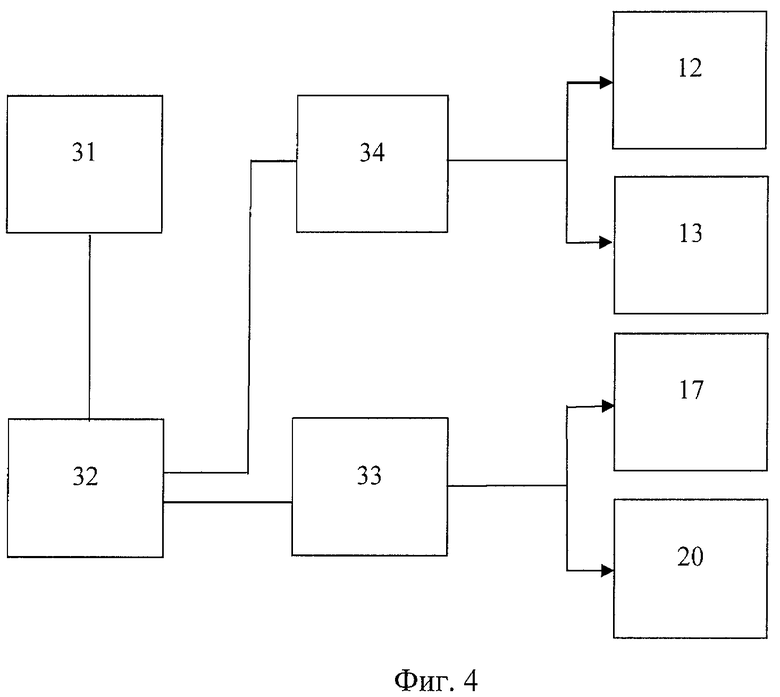
Устройство работает следующим образом (фиг.1, фиг.2, фиг.3, фиг.4). На корпус 1, закрытый снизу защитной сеткой 14, с килем 16, установлена обзорная часть 4 с ограждением 5, к которой крепится фонарь 3 и мачта 2, ось 10 установлена корпусе 1, на ней смонтированы водные колеса 7 и 9, вращаюшиеся в горизонтальных плоскостях посредством приводного механизма, и электропривода с источником питания 14, причем приводной механизм закрыт крышкой 11, смонтирован на оси 10, установленной в центре корпуса 1 и связывает валы 23, 24 двух электродвигателей постоянного тока 12, 13 с двумя втулками верхнего 25 и нижнего 27 полых водных колес 7 и 9 посредством одетых на валы 23, 24 и втулки 25, 27 четырех конических зубчатых колес 26, 27, 28, 29, причем, для изменения углов поворота лопастей 6, 8 весел 19, 22, каждая из двух замкнутых кольцевых зубчатых кинематических цепей расположена внутри верхнего 7 и нижнего 9 полых водных колес и состоит из восьми конических шестерен 18 и 21, четыре из них установлены на веслах 19 и 22 и кинематически связаны с шестернями, одетыми на валы двух шаговых электродвигателей 17, 20, закрепленных внутри верхнего 7 и нижнего 9 водных колес, причем выходы пульта оператора 31 подключены к входам вычислительного блока 32, выходы которого подключены к входам контроллера электропривода постоянного тока 33 и контроллера шагового электропривода 34, а выходы последних связаны с входами двух электродвигателей постоянного тока 12, 13 и двух шаговых электродвигателей 17, 20.
Действие устройства обусловлено использованием электропривода постоянного тока с источником питания 14 для вращения верхнего и нижнего водных колес 7, 9 и шагового электропривода для изменения угла поворота лопастей 6, 8 весел 19, 22 (фиг.1, 2, 3).
Воднотранспортный модуль может перемещаться над водой и под водой (фиг.1). Блок вычислений 32 (фиг.4) вырабатывает управляющие сигналы о малых перемещениях (углах поворота) лопастей 6, 8 весел 19, 22 верхнего и нижнего водных колес 7, 9. Шаговые электродвигатели 17, 20, которые с помощью одетых на их валы шестерен 18, 21 приводят в движение весла 19, 22, поворачивая их в опорах на подшипниках, и сообщая, тем самым, угловое перемещение лопастям 6 и 8, предусмотрены для коррекции их положения относительно горизонта (фиг.1, 2, 3).
Применение устройства управления позволит повысить уровень автоматизации воднотранспортных средств для выполнения поисковых работ, расширить технологические возможности устройства. Повышение эффективности устройств подобного типа основано на применении средств вычислительной техники для процесса управления, что позволит снизить себестоимость изделий и тем самым обеспечить конкурентоспособность предложенного электронно-механического устройства.
Перечень чертежей
Фиг.1. Устройство воднотранспортного модуля.
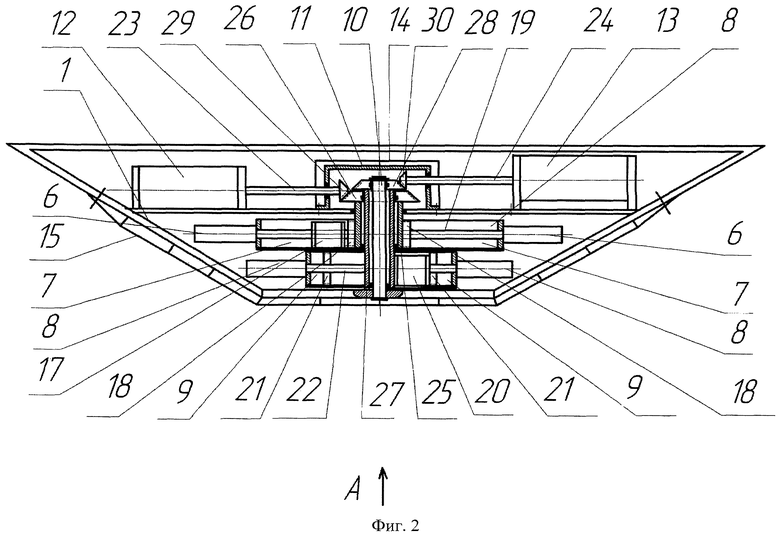
Фиг.2. Устройство двигательного отсека.
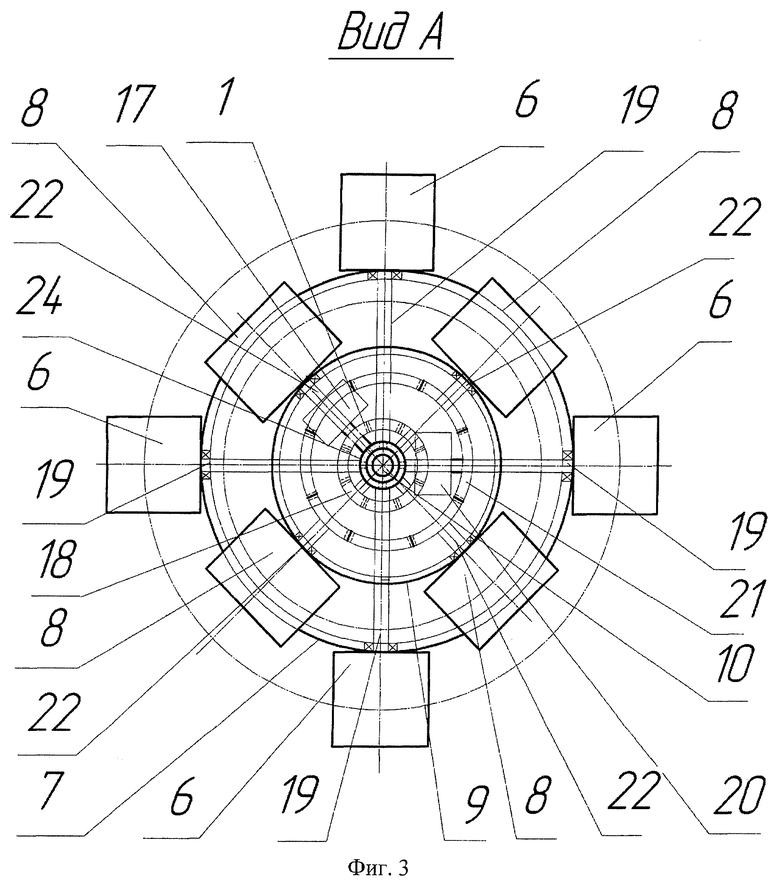
Фиг.3. Устройство привода водных колес.
Фиг.4. Схема управления воднотранспортного модуля.
Источники информации
1. Подводный робот. Патент SU №1434675, Кл. В63В 21/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ПОВЫШЕННОЙ ГРУЗОПОДЪЕМНОСТИ (ВАРИАНТЫ) | 2015 |
|
RU2585380C1 |
| Игрушечная весельная самоходная лодка | 1990 |
|
SU1734808A1 |
| Водный велосипед (вопед) | 2021 |
|
RU2772919C1 |
| Водный степпер | 2022 |
|
RU2779665C1 |
| ГРЕБНО-ПАРУСНАЯ МОТОЛОДКА ПОЛЯ | 2013 |
|
RU2529042C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ГРЕБЦОВ | 1991 |
|
RU2046619C1 |
| ГРЕБНО-ПАРУСНАЯ ЛОДКА ПОЛЯ | 2019 |
|
RU2714378C1 |
| ТРЕНАЖЕР ДЛЯ ГРЕБЦОВ | 2022 |
|
RU2791091C1 |
| ДВУХСТОРОННИЙ ВЕТРОГЕНЕРАТОР | 2018 |
|
RU2700802C1 |
| Вёсельное устройство для гребли лицом по направлению движения судна | 2020 |
|
RU2743259C1 |
Изобретение относится к устройствам управления воднотранспортными средствами для перемещения объектов и может быть использовано в робототехнике. Устройство управления воднотранспортного модуля содержит корпус (1), закрытый металлической сеткой (14) с килем (16) снизу, обзорную часть (4) с ограждением (5), к которой крепится фонарь (3), мачту (2) и двигательный отсек. На оси (10) корпуса смонтированы полые водные колеса (7) и (9), вращающиеся в горизонтальной плоскости посредством закрытого крышкой (11) приводного механизма. Приводной механизм связывает валы двух электродвигателей постоянного тока (12, 13) с втулками полых водных колес посредством одетых на валы и втулки четырех конических зубчатых колес. Для изменения углов поворота лопастей (6, 8) весел каждая из двух замкнутых кольцевых зубчатых кинематических цепей расположена внутри полых водных колес и состоит из восьми конических шестерен, четыре из которых установлены на веслах и кинематически связаны с шестернями, одетыми на валы двух шаговых электродвигателей, закрепленных внутри водных колес. Выходы пульта оператора подключены к входам вычислительного блока, выходы которого подключены к входам контроллера электропривода постоянного тока и контроллера шагового электропривода. Выходы контролера шагового электропривода связаны с входами двух электродвигателей постоянного тока и двух шаговых электродвигателей. Достигается упрощение конструкции и расширение технологических возможностей воднотранспортных устройств для перемещения объектов. 4 ил.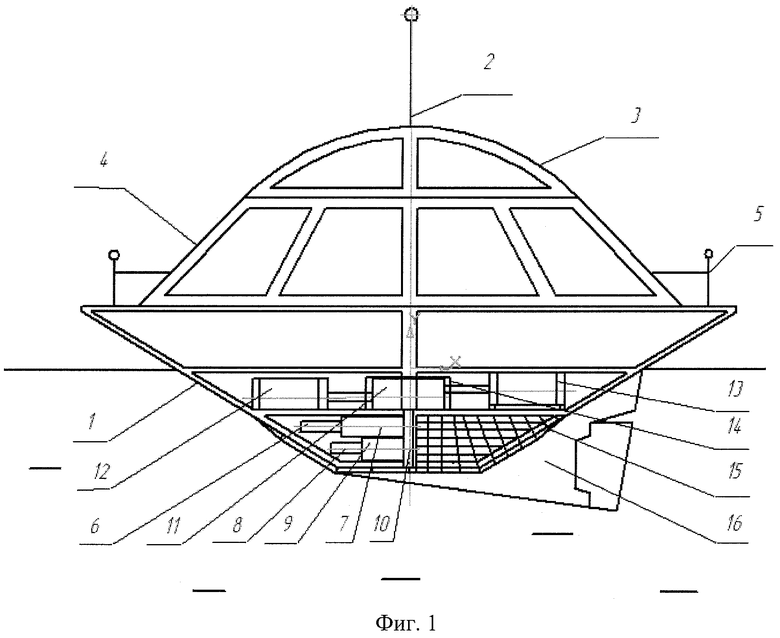
Воднотранспортный модуль, содержащий корпус, закрытый металлической сеткой с килем снизу, обзорную часть с ограждением, к которой крепится фонарь, мачту и двигательный отсек, причем на оси корпуса смонтированы водные колеса, вращающиеся в горизонтальной плоскости посредством закрытого крышкой приводного механизма, отличающийся тем, что содержит шаговые электроприводы для изменения угла поворота лопастей восьми весел верхнего и нижнего колес, а выходы пульта оператора подключены к входам вычислительного блока, выходы которого подключены к входам контроллера электропривода постоянного тока и контроллера шагового электропривода, а выходы последних связаны с входами двух электродвигателей постоянного тока и двух шаговых электродвигателей.
| SU 1434675 А1, 20.06.1996 | |||
| ПОДВОДНО-НАДВОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ПРОНИЦАЕМОГО ТИПА | 2000 |
|
RU2191135C2 |
| US 2008141923 А1, 19.06.2008 | |||
| US 2001045183 A1, 29.11.2001. | |||

