ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Изобретение относится к способу определения направления схемы размещения шпуров. Изобретение дополнительно относится к программному продукту и буровой установке. Область изобретения раскрыта более конкретно в преамбулах независимых пунктов формулы изобретения заявки.
Обычно проходку туннелей осуществляют согласно заданному проекту туннеля. Проект туннеля определяет, например, осевую линию туннеля, подлежащего проходке в проектной системе координат рабочей площадки туннеля. Дополнительно проект туннеля определяет систему координат, подлежащую использованию в каждом варианте. Поскольку проходку туннеля осуществляют комплектами шпуров, схему размещения шпуров разрабатывают заранее, в процессе камеральной работы для каждого комплекта шпуров, причем схему размещения шпуров определяет, по меньшей мере, число, точки заложения, направления и длины шпуров, подлежащих бурению. Схема размещения шпуров имеет свою собственную систему координат, являющуюся независимой от проектной системы координат площадки работ туннеля. Для выполнения бурения подлежит определению местоположение и направление работы буровой установки относительно осевой линии туннеля, и дополнительно необходимо иметь возможность направлять схему размещения шпуров нового комплекта шпуров так, чтобы туннель продвигался согласно проектной осевой линии туннеля.
На практике проходка туннеля проходит так, что, когда предшествующий комплект шпуров пробурен, заряжен и взорван, разрушенный материал горной породы транспортируют в другое место, с последующим перемещением буровой установки к фронту забоя туннеля и привязкой. В процессе привязки направление буровой установки привязывают к проектной системе координат посредством туннельного лазера, направление которого, в свою очередь, определено двумя координатными точками в проектной системе координат, с прохождением луча туннельного лазера через данные точки. Информацию о местоположении буровой установки на осевой линии туннеля может давать оператор, например, посредством ввода так называемого номера пикета. Поскольку осевая линия туннеля определена в проектной системе координат, систему координат локальной площадки используют на площадке бурения, и схема размещения шпуров имеет свою собственную систему координат, проектная система координат и система координат площадки подлежат трансформации в систему координат схемы размещения шпуров посредством матрицы преобразований или тому подобного, по существу. Дополнительно, когда туннель, подлежащий проходке, является криволинейным или луч туннельного лазера и осевая линия туннеля не параллельны, точка пересечения луча туннельного лазера и схемы размещения шпуров, а также углы направления шпуров подлежат расчету в блоке управления буровой установки применительно к каждому комплекту шпуров для обеспечения возможности бурения шпуров, согласно схеме размещения шпуров.
В известном расчете кривой осевую линию туннеля определяют с помощью таблицы кривой, содержащей информацию по координатам точек, разнесенных на заданные расстояния друг от друга. Оператор сообщает местоположение буровой установки на осевой линии туннеля, то есть на практике расстояние до нее от начальной точки туннеля в блок управления, после чего выбирают точки таблицы кривой, ближайшие к площадке бурения, и локальные системы координат устанавливают на данные точки так, чтобы ось y каждой локальной системы координат была направлена на следующую точку таблицы кривой. Затем рассчитывают точки пересечения луча туннельного лазера и локальных систем координат, установленных в точках таблицы кривой. Дополнительно рассчитывают координаты точки пересечения луча туннельного лазера и навигационной плоскости, установленной на площадке бурения интерполированием по координатам, рассчитанным для точек таблицы кривой. Координаты точки пересечения плоскости, следующей за навигационной плоскостью, также рассчитывают интерполированием аналогичным способом. Последовательно можно рассчитать углы u и v направления шпуров между лучом туннельного лазера и навигационной плоскостью на основе координат точек пересечения.
Недостатком настоящего расчета кривой является неудовлетворительная точность. Замечено, что точность зависит, например, от величины угла, образованного лучом туннельного лазера с осевой линией туннеля. Это происходит потому, что большие значения углов приводят к математическим угловым ошибкам. Дополнительно точность нарушается вследствие того факта, что расчет связан с расстоянием между точками таблицы кривой. Кроме того, настоящий расчет кривой трудно понять, что делает более трудным проектирование туннеля и схемы размещения шпуров.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является создание нового и усовершенствованного способа направления схемы размещения шпуров в криволинейном туннеле, программного продукта для реализации способа и буровой установки.
Способ согласно изобретению отличается тем, что содержит следующие стадии: сообщение данных длины комплекта шпуров, подлежащих бурению, в блок управления; определение формы осевой линии туннеля в секции следующего комплекта шпуров, подлежащего бурению; расположение начальной точки схемы размещения шпуров на осевой линии туннеля; определение расстояния, соответствующего длине комплекта шпуров, подлежащего бурению, начинающегося от начальной точки, и расположение конечной точки комплекта шпуров в конкретную точку заложения на осевой линии туннеля; направление схемы размещения шпуров из начальной точки (30) в конечную точку (31); выполнение преобразований систем координат с учетом определенного направления схемы размещения шпуров и расчет координат и направлений для шпуров согласно схеме размещения шпуров для бурения.
Буровая установка согласно изобретению отличается тем, что исполнение программного продукта, загруженного в блок управления, сконфигурировано для дополнительного выполнения следующих процедур: определение формы осевой линии туннеля для секции следующего комплекта шпуров, подлежащих бурению; расположение начальной точки схемы размещения шпуров на осевой линии туннеля; определение расстояния, соответствующего длине комплекта шпуров, подлежащего бурению, начинающегося от начальной точки, и расположение конечной точки комплекта шпуров в конкретной точке заложения на осевой линии туннеля; направление схемы размещения шпуров из начальной точки в конечную точку; выполнение преобразований систем координат с учетом определенного направления схемы размещения шпуров и расчет координат и направлений для шпуров согласно схеме размещения шпуров для бурения.
Программный продукт согласно изобретению отличается тем, что исполнение программного продукта в блоке управления сконфигурировано для выполнения следующих процедур: определение формы осевой линии туннеля для секции следующего комплекта шпуров, подлежащего бурению; расположение начальной точки схемы размещения шпуров на осевой линии туннеля; определение конечной точки комплекта шпуров, подлежащего бурению, на осевой линии туннеля по информации о длине комплекта шпуров и форме осевой линии туннеля для секции комплекта шпуров; направление схемы размещения шпуров из начальной точки в конечную точку; выполнение преобразований систем координат с учетом определенного направления схемы размещения шпуров.
Дополнительно второй способ согласно изобретению отличается тем, что осуществляют определение формы осевой линии туннеля для секции следующего комплекта шпуров, подлежащего бурению, по информации о длине комплекта шпуров; расположение нулевой точки второй системы координат на осевой линии туннеля и определение ее как начальной точки; определение расстояния, соответствующего длине комплекта шпуров, подлежащего бурению, с началом от начальной точки и расположение конечной точки комплекта шпуров в конкретной точке заложения на осевой линии туннеля; направление второй системы координат так, чтобы одна из ее осей была направлена из начальной точки в конечную точку; выполнение преобразований систем координат из первой системы координат во вторую систему координат, с учетом определенного направления второй системы координат.
Идея, лежащая в основе изобретения, состоит в том, что буровая установка привязывается к площадке бурения, и в блок управления буровой установки передается информация о местоположении буровой установки на осевой линии туннеля, например начальной точке комплекта шпуров. Затем данные длины комплекта шпуров, подлежащего бурению, передают на блок управления и кривизну проходимого туннеля определяют в секции следующего комплекта шпуров, подлежащего бурению. Последовательно определяют расстояние, соответствующее длине комплекта шпуров на осевой линии туннеля, и конечную точку комплекта шпуров располагают в конкретной точке заложения на осевой линии туннеля. Дополнительно схему размещения шпуров направляют в блоке управления на основе длины комплекта шпуров из начальной точки комплекта шпуров на осевой линии туннеля к конечной точке комплекта шпуров на осевой линии туннеля. Последовательно преобразования системы координат из проектной системы координат в систему координат схемы размещения шпуров выполняют в блоке управления с использованием матрицы преобразований, например.
Преимуществом изобретения является улучшенная точность проходки. Дополнительно можно выбирать необходимую длину комплекта шпуров. Дополнительным преимуществом является то, что возможная величина угла между лучом туннельного лазера и осевой линией туннеля не является существенной для точности расчета. Способ согласно изобретению также является более простым для понимания, обеспечивая более широкое использование возможности вычисления кривой по осевой линии туннеля и привлечение разработчиков схемы размещения шпуров. Оператору буровой установки также просто освоить расчет кривой согласно изобретению.
Идея варианта осуществления изобретения состоит в том, что систему координат локальной площадки располагают на площадке бурения так, чтобы одна из ее осей была направлена из начальной точки в конечную точку, и направление схемы размещения шпуров рассчитывают на основе системы координат площадки.
Идея варианта осуществления изобретения состоит в том, что ось y системы координат схемы размещения шпуров направляют из начальной точки в конечную точку. Соответственно, если используют систему координат площадки, ее ось y направляют в направлении бурения. Таким образом, применяют схему системы координат, обычно используемую в данной области.
Идея варианта осуществления изобретения состоит в том, что расстояние для комплекта шпуров, подлежащего бурению, определяют от начальной точки до конечной точки вдоль осевой линии туннеля.
Идея варианта осуществления изобретения состоит в том, что расстояние определяют от начальной точки до конечной точки вдоль кратчайшего возможного пути.
Идея варианта осуществления изобретения состоит в том, что систему координат локальной площадки для площадки бурения располагают так, чтобы ее ось ys была направлена в направлении бурения. В расчете кривой ось ys направляют от начальной точки к конечной точке. На данной основе рассчитывают направление схемы размещения шпуров.
Идея варианта осуществления изобретения состоит в том, что привязка проводится на основе туннельного лазера. Туннельный лазер создает луч, от которого измеряют координаты первой лазерной точки A и второй лазерной точки B, определенные в проектной системе координат. Бурильный блок буровой установки может быть оборудован двумя визирами, в данном варианте бурильный блок перемещают во время привязки так, чтобы луч, испускаемый туннельным лазером, проходил через оба визира. Это обеспечивает соединение направления буровой установки с направлением проектной системы координат и дополнительно на основе данной информации, проведение необходимых преобразований между системами координат. Дополнительно, когда навигационную плоскость направляют из начальной точки комплекта шпуров к конечной точке, определенной длиной комплекта шпуров и формой осевой линии туннеля, нормальные преобразования системы координат из проектной системы координат в систему координат схемы размещения шпуров можно последовательно проводить в блоке управления, и точка пересечения луча туннельного лазера и навигационной плоскости, а также углы u и v направления шпуров между туннельным лазером и навигационной плоскостью могут быть рассчитаны в блоке управления. На основе данной информации блок управления устройства бурения способен рассчитывать точки заложения и направления шпуров, подлежащих бурению.
Идея варианта осуществления изобретения состоит в том, что привязку проводят на основе измерения тахеометрами. В таком варианте туннельный лазер не является необходимым.
Идея варианта осуществления изобретения состоит в том, что осевые линии туннеля определены в таблице кривой, установленной заранее, которая содержит табличные точки кривой, через которые должна проходить осевая линии туннеля, подлежащего выполнению. Координаты x, y и z точек таблицы кривой определены в проектной системе координат. Дополнительно каждой точке таблицы кривой присвоен номер пикета для описания глубины туннеля в плоскости xy относительно опорной точки, такой как начальная точка туннеля. Блок управления также следует информировать о том, какие номера пикетов используются, возрастающие или убывающие, то есть в каком направлении рассматривается осевая линия туннеля от навигационной плоскости.
Идея варианта осуществления изобретения состоит в том, что в расчете кривой используют таблицу кривой и определяют точку таблицы кривой, ближайшую к средней точке комплекта шпуров, подлежащего бурению, и определяют две точки таблицы кривой, ближайшие к данной средней точке таблицы кривой. Затем аппроксимируют кривизну туннеля на комплекте шпуров, подлежащем бурению, определением в блоке управления кривой, дескриптор которой наилучшим образом проходит через упомянутые три точки таблицы кривой. Дополнительно схему размещения шпуров, то есть, на практике, навигационную плоскость, направляют на площадке бурения так, чтобы, учитывая длину комплекта шпуров, ось y системы координат схемы размещения шпуров была направлена к конечной точке комплекта шпуров, которая находится на аппроксимированной кривой.
Идея варианта осуществления изобретения состоит в том, что точки определяют в таблице кривой, разнесенными на различное расстояние друг от друга. В таком варианте, например, расстояние между точками таблицы кривой может быть уменьшенным для секций, в которых криволинейный участок осевой линии туннеля становится прямолинейным, и наоборот, в сравнении с данным расстоянием в других секциях. Дополнительно, когда радиус кривизны меняется в криволинейном туннеле, точки таблицы кривой можно определять расположенными более плотно, что обеспечивает повышение точности расчета.
Идея варианта осуществления изобретения состоит в том, что вместо использования точек таблицы кривой осевую линию туннеля определяют выражением центральной оси туннеля в виде математического уравнения. Математическая функция, описывающая осевую линию туннеля, может быть установлена заранее в процессе камеральной работы посредством использования программы проектирования туннеля. Непрерывная математическая функция, описывающая осевую линию туннеля, может представлять собой уравнение дуги или окружности, например. Данное практическое применение может повышать точность, особенно при бурении на кривой малого радиуса.
Идея варианта осуществления изобретения состоит в том, что оператор вводит данные местоположения площадки бурения через интерфейс пользователя в блок управления. На основе представленной информации блок управления устанавливает навигационную плоскость и начальную точку комплекта шпуров на осевой линии туннеля.
Идея варианта осуществления изобретения состоит в том, что измеряют местоположение площадки бурения и измерительную информацию сообщают в блок управления. Блок управления устанавливает навигационную плоскость и начальную точку комплекта шпуров в измеренном местоположении на осевой линии туннеля. Измерение можно проводить посредством тахеометра или другого приемлемого измерительного устройства.
Идея варианта осуществления изобретения состоит в том, что оператор вводит данные длины комплекта шпуров в интерфейс пользователя блока управления.
Идея варианта осуществления изобретения состоит в том, что длина комплекта шпуров определена в схеме размещения шпуров, так что ее учитывают уже при загрузке данных схемы размещения шпуров в блок управления.
Идея варианта осуществления изобретения состоит в том, что схему размещения шпуров отклоняют на величину заданного угла наклона. Углы наклона осевой линии туннеля можно определить, например, в таблице кривой отдельно в каждой точке. Если угол наклона отличается от нуля, систему координат схемы размещения шпуров отклоняют на величину угла наклона, определенного для поворота комплекта шпуров вокруг прямой линии, параллельной оси yd, в результате чего ось yd схемы размещения шпуров остается направленной в конечную точку комплекта шпуров, но направления осей xd и zd схемы размещения шпуров изменяются на угол наклона. Влияние угла наклона учитывают в матрицах преобразований систем координат.
Идея варианта осуществления изобретения состоит в том, что точку поворота определяют заранее для определения положения системы координат схемы размещения шпуров относительно системы координат площадки. Координаты точки поворота определяют в системе координат площадки бурения и в системе координат схемы размещения шпуров.
Идея варианта осуществления изобретения состоит в том, что углы наклона определяют для осевой линии туннеля и дополнительно положение системы координат схемы размещения шпуров относительно системы координат площадки определяют посредством точки поворота. В таком варианте систему координат схемы размещения шпуров отклоняют с поворотом вокруг прямой линии, проходящей через точку поворота и параллельной оси y системы координат схемы размещения шпуров.
Идея варианта осуществления изобретения состоит в том, что, по существу, все процедуры, связанные с управлением направленностью схемы размещения шпуров, исполняют в блоке управления буровой установки.
Идея варианта осуществления изобретения состоит в том, что, по меньшей мере, одну из процедур, связанных с направлением схемы размещения шпуров, исполняют в одном или нескольких блоках управления за пределами буровой установки. В таком варианте информацию, связанную с направлением схемы размещения шпуров, сообщают через канал передачи данных между блоком управления буровой установки и блоком управления, размещенным, например, в кабине управления горной проходкой.
Идея варианта осуществления изобретения состоит в том, что направление схемы размещения шпуров выполняют проектирующим компьютером или соответствующим блоком управления, используемым для создания проекта туннеля или схемы размещения шпуров, что позволяет проектировщику моделировать планы бурения или т.п., если необходимо.
Идея варианта осуществления изобретения состоит в том, что для направления схемы размещения шпуров программный продукт загружают из запоминающего устройства или средства хранения, такого как карта памяти, диск, жесткий диск, сервер информационной сети или т.п., и при исполнении программного продукта в блоке управления выполняются действия, описанные в настоящей заявке.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Варианты осуществления изобретения описаны более подробно с ссылками на прилагаемые чертежи, на которых показано следующее.
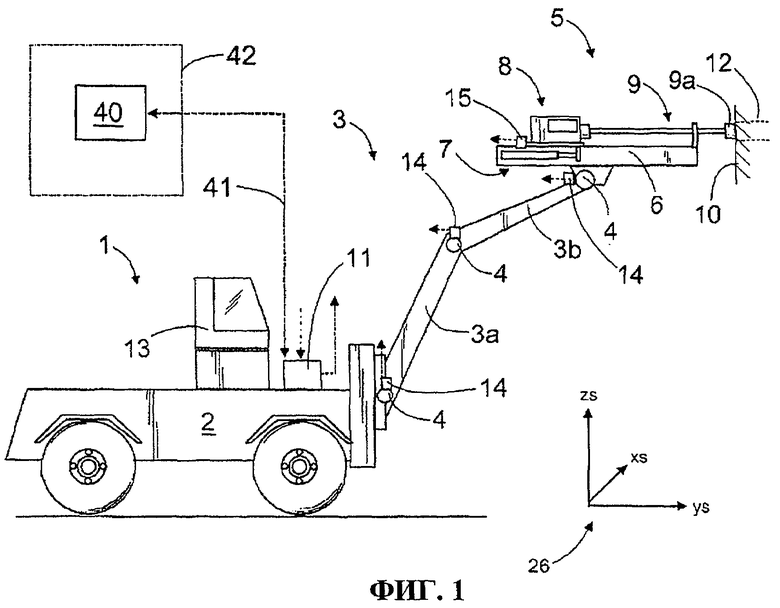
На фиг.1 схематично показан вид сбоку буровой установки, установленной для бурения перед фронтом забоя туннеля.
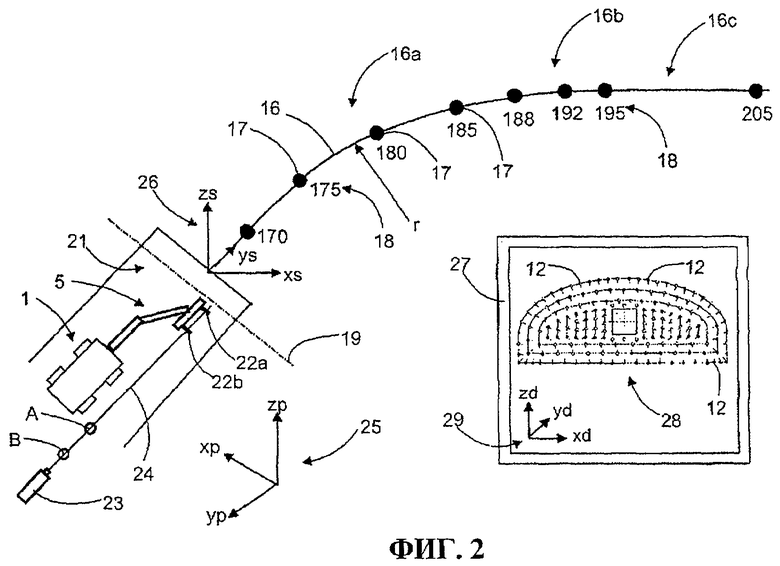
На фиг.2 схематично показаны в виде проекции на плоскость xy криволинейный туннель, системы координат, используемые применительно к нему, и устройство привязки буровой установки на площадке бурения.
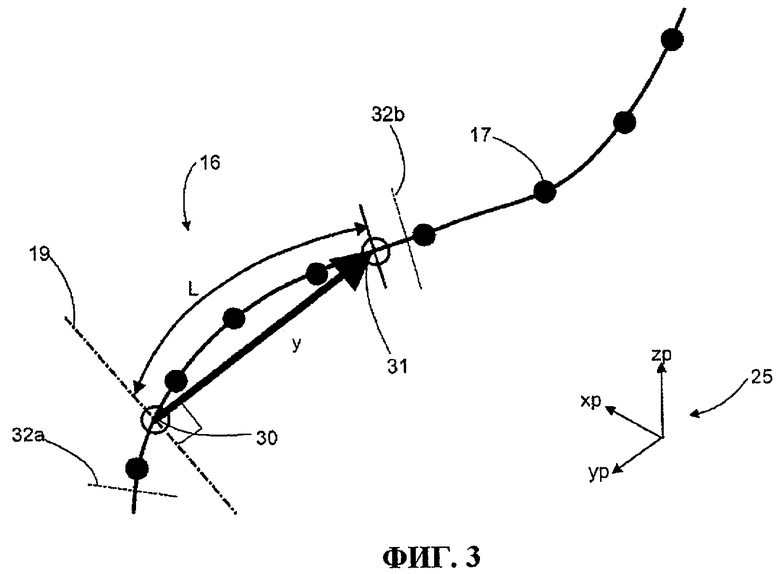
На фиг.3 схематично показана проекция на плоскость xy решения согласно изобретению для направления схемы размещения шпуров от начальной точки, лежащей на навигационной плоскости, к конечной точке комплекта шпуров, лежащей на осевой линии туннеля.
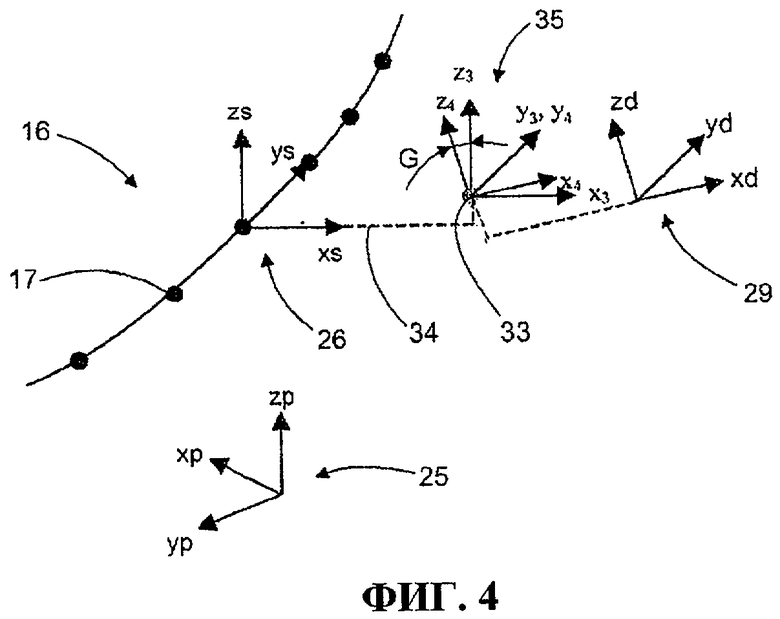
На фиг.4 схематично показано преобразование проектной системы координат в систему координат площадки бурения и дополнительно в систему координат схемы размещения шпуров и перемещение и отклонение системы координат схемы размещения шпуров с поворотом относительно заданной точки.
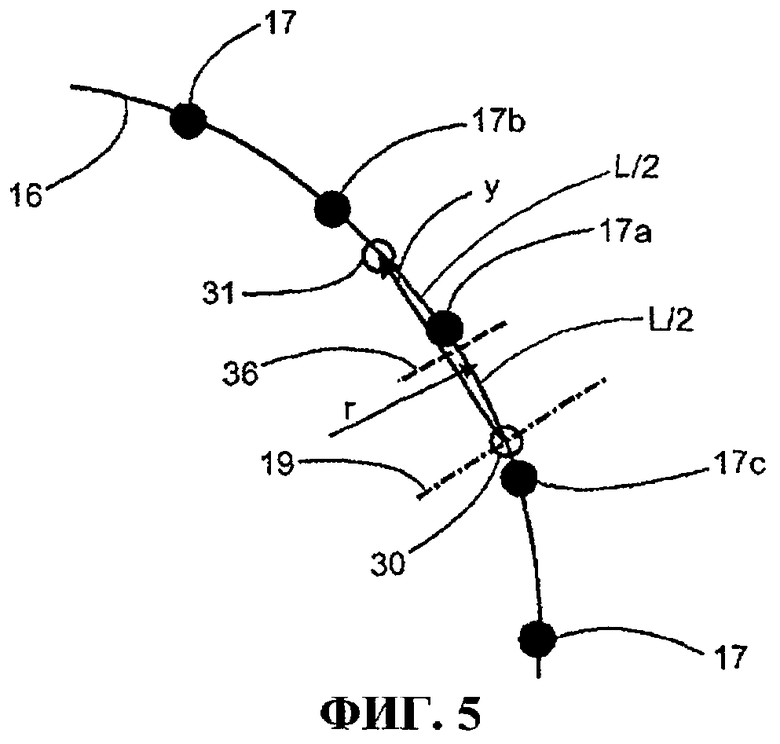
На фиг.5 схематично показан в проекции на плоскость xy путь аппроксимации криволинейной осевой линии туннеля на основе трех точек таблицы кривой.
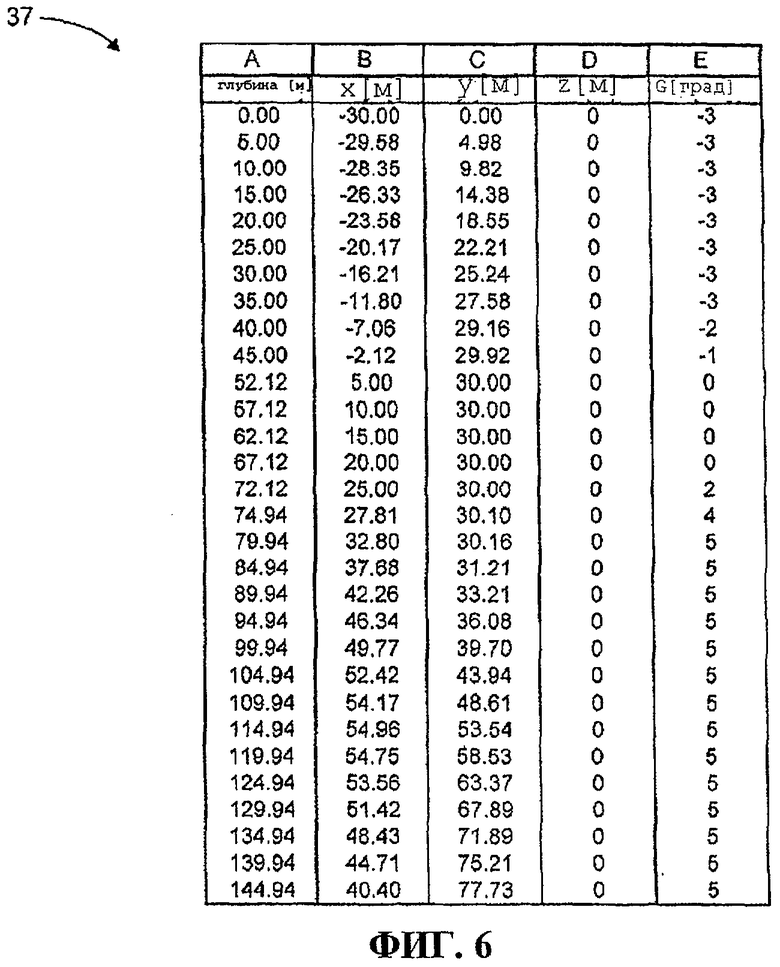
На фиг.6 показана таблица кривой, определяющая номера пикетов, координаты точек и углы наклона.
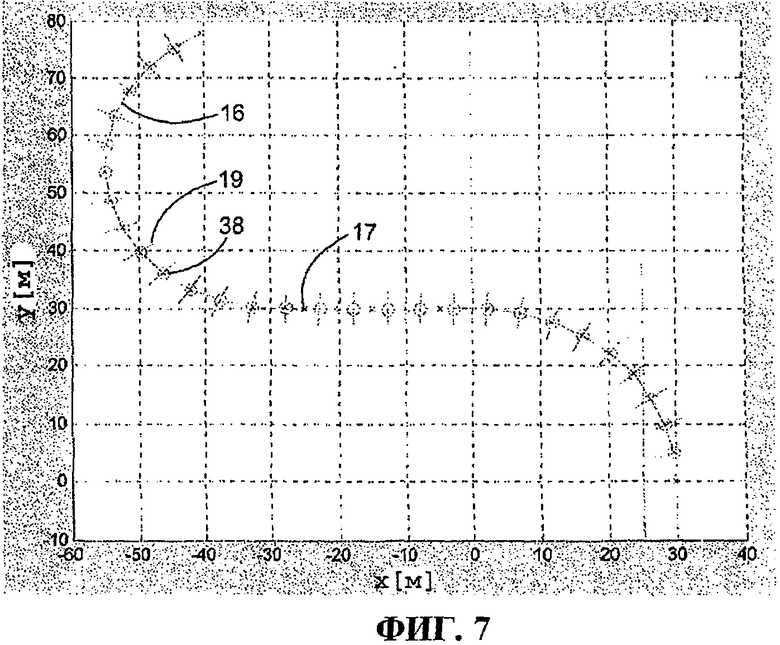
На фиг.7 показана осевая линия туннеля по таблице кривой согласно фиг.6 в проекции на плоскость xy, снабженная навигационной плоскостью, направленной согласно длинам комплектов шпуров.
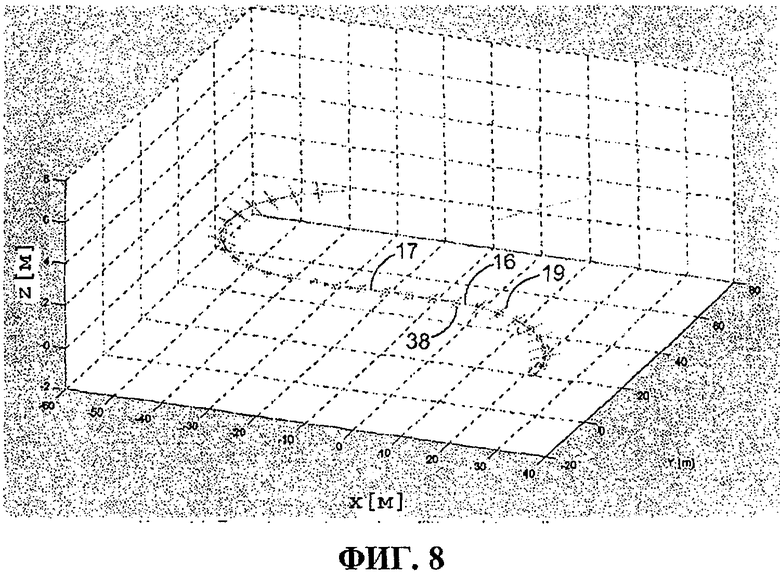
На фиг.8 показана осевая линия туннеля по таблице кривой согласно фиг.6 в трех измерениях, с возможностью видеть также углы наклона, определенные в таблице кривой, из положений поперечных линий, показывающих навигационные плоскости.
Для ясности варианты осуществления изобретения на фигурах показаны упрощенно. Одинаковые части обозначены одинаковыми ссылочными позициями.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Буровая установка 1, показанная на фиг.1, содержит подвижное транспортное средство 2, снабженное одним или несколькими бурильными манипуляторами 3. Бурильный манипулятор 3 может состоять из одной или нескольких частей 3a, 3b манипулятора, соединенных друг с другом и транспортным средством 2 шарнирами 4 для перемещения манипуляторов 3 в различных режимах в разных направлениях. Дополнительно свободный конец каждого бурильного манипулятора 3 может снабжаться бурильным блоком 5, который может содержать направляющую балку 6, устройство 7 подачи, бурильную машину 8 и инструмент 9, дальний конец которого может быть оснащен буровым долотом 9a. Бурильная машина 8 может перемещаться устройством 7 подачи по направляющей балке 6 для обеспечения подачи инструмента 9 к горной породе 10 во время бурения. Бурильная машина 8 может содержать ударное устройство для передачи ударных импульсов на инструмент 9 и вращательное устройство для вращения инструмента 9 вокруг его продольной оси. Буровая установка 1 может дополнительно содержать один или несколько блоков 11 управления бурением. Блок 11 управления может содержать один или несколько процессоров, программируемую логическую схему или аналогичное устройство для исполнения программного продукта, исполнение которого создает способ согласно изобретению. Кроме того, блок 11 управления может быть снабжен схемой размещения шпуров, определяющей, по меньшей мере, точку заложения и направление шпуров 12, подлежащих бурению. Блок 11 управления дополнительно содержит устройство отображения, размещенное на буровой платформе буровой установки 1 или в кабине 13 управления. Устройство отображения выдает информацию, необходимую для бурения и установки в нужное положение, подлежащую отображению перед оператором, который через интерфейс пользователя устройства отображения может давать команды и информацию на блок 11 управления. Блок 11 управления может подавать команды на исполнительные механизмы, перемещающие бурильный манипулятор 3, на устройство 7 подачи на другие исполнительные механизмы, оказывающие влияние на местоположение бурильного блока 5. Дополнительно к этому, один или несколько датчиков 14 могут быть соединены с шарнирами 4 бурильного манипулятора 3, и один или несколько датчиков 15 могут быть соединены с бурильным блоком 5. Измерительная информация, полученная от датчиков 12, 13, может передаваться в блок 11 управления, который на основании измерительной информации может определять местоположение и направление бурильного блока 5 для управления. Дополнительно к этому компьютерный процессор блока 11 управления оснащен расчетным блоком с возможностью исполнения матриц преобразований систем координат, а также, например, расчетов, необходимых для привязки и установки бурильного блока. Показанный на фиг.1 блок 11 управления имеет блок 5, установленный на шпур 12, подлежащий бурению, после выполнения расчетов точки заложения и направления шпуров согласно уже рассчитанной схеме размещения шпуров и выполнения преобразований системы координат.
На фиг.2 показана криволинейная осевая линия 16 туннеля, которую можно определить посредством точек 17 таблицы кривой или другим способом, например математическими уравнениями. Когда используют таблицу, осевая линия 16 туннеля проходит через точки 17. При проектировании туннеля координаты точки 17, номера 18 пикетов, а также углы наклона определены в таблице кривой, как можно видеть на фиг.6. Точки 17 таблицы кривой размещены по осевой линии 16 туннеля на определенном расстоянии друг от друга, так что каждая точка 17 снабжена своим собственным номером 18 пикета. Номер 18 пикета при этом указывает глубину туннеля в некоторой точке заложения, начиная от опорной точки. Номер 18 пикета может быть дан в метрах, начиная от начальной точки туннеля. Оператор буровой установки 1 может сообщить номер 18 пикета на блок 11 управления, чтобы блок управления имел данные о том, как далеко продвинулось бурение туннеля. Номер 18 пикета дает возможность определения местоположения навигационной плоскости 19 в направлении xz на осевой линии 16 туннеля. Дополнительно в блок 11 управления вводят информацию о том, возрастает или снижается номер 18 пикета, чтобы блок управления 11 имел данные по направлению, в котором осевая линия 16 туннеля подлежит рассмотрению от навигационной плоскости 19. Схему 28 размещения шпуров устанавливают на навигационной плоскости 19. На точность расчета кривой влияет, например, расстояние между точками 17 таблицы кривой. Точность расчета кривой можно, следовательно, улучшить более плотным разносом точек 17 таблицы кривой с необходимыми точками заложения, поскольку в решении согласно изобретению точки 17 таблицы кривой не обязательно должны быть разнесены на равные расстояния друг от друга. Таблицу кривой можно создать с точками 17, разнесенными более плотно, например, на участке 16b, где секция 16a туннеля постоянной кривизны становится прямой секцией 16c и, наоборот, на местах, где радиус r кривизны туннеля резко меняется.
Следует заметить, что туннель является криволинейным, если три выбранные точки, расположенные на его центральной оси, не располагаются на одной прямой. До расчета кривой программный продукт, подлежащий исполнению в блоке 11 управления, может проверить, является ли секция туннеля прямой, как секция 16c, или криволинейной, как секции 16a, 16b. Если секция туннеля является криволинейной, можно использовать решение, описанное в настоящей заявке. Применительно к прямым секциям можно использовать интерполяцию.
На фиг.2 буровая установка 1 перемещена к фронту 21 забоя туннеля для привязки. Для привязки один бурильный блок 5 буровой установки 1 можно оборудовать двумя визирами 22a и 22b, в таком варианте бурильный блок 5 перемещают на площадке бурения так, чтобы луч 24 туннельного лазера 23, направленный вперед, проходил через визиры. Координаты для первой лазерной точки A и второй лазерной точки B, определяющих направление туннельного лазера 23, определены в проекте туннеля. Когда бурильный блок буровой установки установлен в положение, обеспечивающее прохождение через визиры луча, испускаемого туннельным лазером, блок 11 управления может определить направление буровой установки 1 относительно проектной системы 25 координат, в которой определено направление туннельного лазера 23. Дополнительно оператор может задать местоположение навигационной плоскости 19 на осевой линии туннеля, или местоположение навигационной плоскости 19 можно измерить. На основе данной информации можно проводить преобразования системы координат.
На фиг.2 дополнительно показаны системы координат, подлежащие использованию в проходке туннеля. Системы координат и их взаимоотношение, заданное Международным стандартом обмена данными проходки горной породы, можно применить для настоящей заявки. В проектной системе 25 координат осевая линия 16 туннеля и лазерные точки A и B заданы координатами xp, yp и zp.Дополнительно используют «локальную систему 26 координат» площадки с осями xs, ys и zs на площадке бурения такую, чтобы ось ys была направлена в направлении бурения. На фиг.2 дополнительно показана схема 28 размещения шпуров на устройстве 27 отображения блока 11 управления, где схема 28 размещения шпуров создана в собственной системе 29 координат, вместе с ее осями xd, yd и zd.
На фиг.3 показано управление направленностью схемы 28 размещения шпуров в проекции на плоскость xy. Ось ys системы 26 координат площадки направлена из исходной точки 30, размещенной на навигационной плоскости 19, в конечную точку 31 комплекта шпуров, размещенного на осевой линии 16 туннеля. На основе управления направленностью системы координат площадки расчет кривой проводит необходимые расчеты преобразований и направляет схему размещения шпуров 28 для бурения. Для управления направленностью оператор через интерфейс пользователя блока 11 управления вводит длину L комплекта шпуров, подлежащего бурению, или, альтернативно, длину L указывают иначе, например, в схеме 28 размещения шпуров. Заложение конечной точки 31 определяют на основе кривизны осевой линии 16 туннеля и длины L комплекта шпуров. Форму осевой линии 16 туннеля можно аппроксимировать посредством того, что называется проведением кривой по точкам, то есть расположением кривой с прохождением через точки 17 таблицы кривой, или, альтернативно, форма осевой линии 16 туннеля может быть дана как математические функции для различных секций осевой линии 16 туннеля. В качестве примера на фиг.3 показаны линии 32a и 32b, при этом криволинейная осевая линия туннеля между ними определена как непрерывная математическая функция, например как уравнение дуги или окружности данного радиуса. В таком варианте блок 11 управления имеет данные о том, где проходит осевая линия 16 туннеля, и способен располагать конечную точку 31 следующего комплекта шпуров, подлежащего бурению, на расстоянии, соответствующем длине L комплекта шпуров от исходной точки, как задано вдоль осевой линии 16 туннеля. Затем систему 26 координат площадки направляют в блоке 11 управления так, чтобы ось ys была направлена из исходной точки 30 в конечную точку 31. Когда новое направление системы 29 координат схемы размещения шпуров рассчитано и система координат направлена, направление навигационной плоскости 19 также меняется. На фиг.4 показаны системы координат, подлежащие использованию в расчете кривой и преобразованиях, связанных с этим. Системы координат и матрицы преобразований, подлежащие использованию в преобразованиях систем, заданы в Международном стандарте обмена данными проходки горной породы, включенном в состав данного документа в виде ссылки. В расчете кривой, подлежащем исполнению в блоке управления буровой установки, рассчитывают зависимости между различными системами координат. В расчете кривой рассчитывают матрицы преобразований из проектной системы 25 координат в систему 26 координат площадки и дополнительно в систему 29 координат схемы размещения шпуров. Дополнительно к этому, если привязка проводится посредством туннельного лазера 23, в расчете кривой рассчитывают точку пересечения луча туннельного лазера и схемы 28 размещения шпуров, а также углы направления между ними. В некоторых случаях, вместе с тем, привязку можно также проводить отличающимся способом. Даже в таком варианте различные системы координат преобразуют, учитывая результаты привязки.
На фиг.4 показан принцип точки 33 поворота. Точка 33 поворота определяет местоположение системы 29 координат схемы размещения шпуров относительно системы 26 координат площадки. Координаты точки 33 поворота определяют как в системе 26 координат площадки бурения, так и в системе 29 координат схемы размещения шпуров. Посредством точки 33 поворота и угла G наклона можно выполнить преобразование 34 в плоскости xz из системы 26 координат площадки в систему 29 координат схемы размещения шпуров, что дает систему координат согласно координатным осям xd, yd и zd, показанным на фиг.4. Если определяют углы G наклона для осевой линии 16 туннеля, система 29 координат схемы размещения шпуров может быть отклонена в фазе 35 с поворотом вокруг прямой линии, проходящей через точку 33 поворота и являющейся параллельной оси yd системы 29 координат схемы размещения шпуров. Вне зависимости от отклонения, координаты точки 33 поворота остаются постоянными в системе 26 координат площадки и в системе 29 координат схемы размещения шпуров. На фиг.4 показано отклонение 35, при этом система координат, заданная осями x3, y3 и z3, поворачивается против часовой стрелки на величину угла G наклона в систему координат, заданную осями x4, y4 и z4. Конечным результатом является система 29 координат схемы размещения шпуров, модифицированная в блоке 11 управления относительно точки 33 поворота.
На фиг.5 показана аппроксимация формы осевой линии 16 туннеля с использованием способа, называемого проведением кривой по точкам. Как заявлено выше, осевую линию 16 туннеля можно определить в таблице кривой. Комплекту шпуров, подлежащему бурению, дана длина L. Кроме того, дано заложение исходной точки, то есть номер пикета, что дает возможность определить точку 17a таблицы кривой, ближайшую к центру 36 комплекта шпуров, а также две точки 17b и 17c таблицы кривой, ближайшие к средней точке 17a таблицы кривой. Затем аппроксимируют кривизну осевой линии 16 туннеля на комплекте шпуров, подлежащем бурению, посредством определения в блоке 11 управления кривой, дескриптор которой наилучшим образом проходит через упомянутые три точки 17a, 17b, 17c таблицы кривой. Обычно кривая является дугой окружности с определяемым сложившейся ситуацией радиусом r. Блок 11 управления может быть снабжен файлом данных различных уравнений кривых, который можно применить. Дополнительно схему размещения шпуров 28 направляют на площадке бурения, то есть на практике навигационную плоскость 19 размещают так, чтобы, учитывая длину L комплекта шпуров, ось yd системы координат схемы размещения шпуров была направлена на конечную точку 31 комплекта шпуров, расположенную на аппроксимированной кривой.
На фиг.6 показана таблица 37 кривой, в которой столбец A определяет номера пикетов точек в метрах, столбец B определяет координаты точки по оси х в метрах, столбец C определяет координаты точки по оси y в метрах, столбец D определяет координаты точки по оси z в метрах и, дополнительно, столбец E определяет угол наклона в градусах. Координаты возможной точки поворота являются для таблицы кривой постоянными коэффициентами, поэтому не должны быть представлены в отдельных столбцах.
Угол G наклона дает возможность отклонения системы координат схемы размещения шпуров с поворотом вокруг прямой линии, параллельной оси y. Даже если угол наклона был нулевым, система координат схемы размещения шпуров может все равно быть отклонена с поворотом вокруг прямой линии, параллельной оси x. В таком варианте туннель включает в себя подъем или спуск. Угол наклона с поворотом вокруг прямой линии, параллельной оси x, определяют на основе перепада высот между точками таблицы кривой.
На фиг.7 показана осевая линия туннеля по таблице 37 кривой согласно фиг.6 в проекции на плоскость xy, снабженная навигационными плоскостями, направленными согласно длине комплекта шпуров. На фиг.7 звездочками на осевой линии 16 туннеля показаны точки 17 таблицы кривой, кружки 38 показывают начальные и конечные точки и дополнительно поперечные линии 19, пересекающие осевую линию туннеля, показывают навигационные плоскости. Аналогично на фиг.8 показана осевая линия 16 туннеля таблицы 37 кривой согласно фиг.6 в трех измерениях, дающей возможность увидеть также углы G наклона, определенные в таблице кривой, по положениям поперечных линий 19, показывающих навигационные плоскости.
В отличие от таблицы 37 кривой, показанной на фиг.6, точкам 17 можно также давать координаты в направлении z. Это дает возможность видеть осевую линию 16 туннеля также как проекцию на ось z и номер пикета, то есть как кривую высоты. Кривизну кривой высоты на комплекте шпуров, подлежащем бурению следующим, можно аппроксимировать способом, аналогичным описанному выше для проекции xy, и дополнительно управление направленностью системы 29 координат схемы размещения шпуров можно проводить способом, аналогичным описанному выше.
На фиг.1 также дополнительно показан внешний блок 40 управления для обеспечения исполнения одной или нескольких процедур, связанных с управлением направленностью схемы размещения шпуров, такой как расчет, связанный с преобразованием системы координат или другой обработкой данных. Является возможным, чтобы по существу все процедуры, связанные с управлением направленностью, исполнялись в таком блоке 40 управления, размещенном, например, в кабине 42 управления, и комплект данных направления схемы размещения шпуров передавался на блок 11 управления буровой установки. Информацию можно передавать между блоками 11 и 40 управления средством передачи данных, которое может быть беспроводным.
Дополнительно следует заметить, что является возможным вместо оси y направлять другие оси системы координат площадки в направлении бурения и, с другой стороны, ось схемы размещения шпуров, отличающуюся от оси y можно направлять от исходной точки в конечную точку. В таком варианте вопрос состоит в наименовании системы координат и ее осей. Дополнительно является возможным вообще не использовать систему координат площадки. В таком варианте проектная система координат и система координат схемы размещения шпуров преобразуются напрямую без расчетов через систему координат площадки. Системы координат можно также именовать отлично от систем, раскрытых выше.
Дополнительно является возможным определение схемы размещения шпуров на навигационной плоскости, при этом целью является обеспечение направления системы координат схемы размещения шпуров с использованием идеи изобретения.
В некоторых случаях признаки, описанные в данной заявке, можно использовать, как есть, вне зависимости от других признаков. С другой стороны, признаки, описанные в данной заявке, можно, если требуется, объединять друг с другом для образования различных комбинаций.
Чертежи и относящиеся к ним описания предназначены только для иллюстрации идеи изобретения. Подробности изобретения могут изменяться в объеме формулы изобретения.
Изобретение относится к способу определения направления схемы размещения шпуров в расчете кривой туннеля, подлежащем исполнению в блоке управления буровой установки. Изобретение дополнительно относится к программному продукту и буровой установке. Техническим результатом является создание нового и усовершенствованного способа направления схемы размещения шпуров в криволинейном туннеле, программного продукта для реализации способа и буровой установки. Для этого осевую линию проходимого туннеля определяют, например, с использованием проведения кривой по точкам. Данные местоположения площадки бурения на осевой линии туннеля сообщают в блок управления и навигационную плоскость схемы размещения шпуров располагают на осевой линии туннеля. Начальную точку комплекта шпуров располагают на осевой линии туннеля и предусматривают длину (L) комплекта шпуров. Дополнительно, конечную точку комплекта шпуров располагают на расстоянии, соответствующем длине комплекта шпуров от начальной точки, и систему координат схемы размещения шпуров направляют так, чтобы одна из ее осей была направлена из начальной точки в конечную точку. В конечном итоге преобразуют различные системы координат. 4 н. и 15 з.п. ф-лы, 8 ил.
1. Способ определения направления схемы размещения шпуров, содержащий следующие стадии:
загрузка в блок (11, 40) управления данных осевой линии (16) проходимого туннеля, определенной в проектной системе (25) координат площадки работ туннеля;
загрузка в блок (11, 40) управления данных схемы (28) размещения шпуров, определяющей, по меньшей мере, навигационную плоскость (19) и систему (29) координат схемы размещения шпуров;
определение площадки бурения для блока (11, 40) управления и расположение локальной системы (26, 29) координат на площадке бурения так, чтобы одна из ее осей была направлена в направлении бурения;
установка навигационной плоскости (19) схемы (28) размещения шпуров на площадке бурения;
установка буровой установки (1) на площадке бурения и соединение систем координат друг с другом посредством привязки;
выполнение необходимых преобразований систем координат из проектной системы (25) координат в систему (29) координат схемы размещения шпуров, отличающийся тем, что осуществляют следующие стадии:
сообщение данных длины (L) комплекта шпуров, подлежащих бурению, в блок (11, 40) управления;
определение формы осевой линии (16) туннеля в секции следующего комплекта шпуров, подлежащего бурению;
расположение начальной точки (30) схемы (28) размещения шпуров на осевой линии (16) туннеля;
определение расстояния, соответствующего длине (L) комплекта шпуров, подлежащих бурению, начинающихся от начальной точки (30),
и расположение конечной точки (31) комплекта шпуров в конкретной точке заложения на осевой линии (16) туннеля;
направление схемы (28) размещения шпуров из начальной точки (30) в конечную точку (31);
выполнение преобразований систем координат с учетом определенного направления схемы (28) размещения шпуров и расчет координат и направлений для шпуров согласно схеме (28) размещения шпуров для бурения.
2. Способ по п.1, отличающийся тем, что выполняют расположение системы (26) координат локальной площадки на площадке бурения так, чтобы одна из ее осей была направлена из начальной точки (30) в конечную точку (31), и расчет на основе системы (26) координат направления схемы (28) размещения шпуров.
3. Способ по п.1 или 2, отличающийся тем, что выполняют определение расстояния от начальной точки (30) до конечной точки (31) вдоль осевой линии (16) туннеля комплекта шпуров, подлежащих бурению.
4. Способ по п.1 или 2, отличающийся тем, что выполняют следующие стадии:
определение осевой линии (16) туннеля по таблице (37) кривой, содержащей данные совокупности точек (17), через которые проходит осевая линия (16) туннеля;
определение для точек (17) таблицы кривой, по меньшей мере, координат x, y, z в проектной системе (25) координат и для каждой точки собственного номера (18) пикета, описывающего глубину туннеля в точке (17) относительно опорной точки и в проекции на плоскость xy;
определение точки (17а) таблицы кривой, ближайшей к центру (36) комплекта шпуров, подлежащих бурению, и определение двух точек (17b, 17с) таблицы кривой, ближайших к данной средней точке (17а) таблицы кривой;
аппроксимация кривизны туннеля на комплекте шпуров, подлежащих бурению, определением в блоке (11, 40) управления уравнения кривой, дескриптор которой наилучшим образом проходит через упомянутые три точки (17а-17с) таблицы кривой;
установка конечной точки (31) комплекта шпуров на кривой, аппроксимирующей кривизну осевой линии туннеля, и на расстоянии от начальной точки (30) комплекта шпуров, соответствующем длине (L) комплекта шпуров, образованной вдоль осевой линии (16) туннеля;
направление в блоке (11, 40) управления схемы (28) размещения шпуров от начальной точки в конечную точку (31) комплекта шпуров.
5. Способ по любому одному из пп.1 или 2, отличающийся тем, что выполняют следующие стадии:
определение заранее кривизны осевой линии (16) туннеля, по меньшей мере, как одной математической функции;
сообщение данных математической функции, описывающей осевую линию (16) туннеля, в блок (11, 40) управления;
направление в блоке (11, 40) управления схемы (28) размещения шпуров так, чтобы одна из осей системы (29) координат схемы размещения шпуров была направлена к конечной точке (31) комплекта шпуров осевой линии (16) туннеля, заданной математической функцией и находящейся на расстоянии (L) от начальной точки (30) комплекта шпуров, соответствующем длине комплекта шпуров.
6. Способ по п.1 или 2, отличающийся тем, что выполняют следующие стадии:
определение луча туннельного лазера (23) в проектной системе (25) координат;
привязка буровой установки (1) на площадке бурения посредством туннельного лазера (23);
выполнение в блоке (11, 40) управления преобразований систем координат и определением точки пересечения луча туннельного лазера (23) и навигационной плоскости (19) и углов направления луча туннельного лазера (23) относительно навигационной плоскости (19).
7. Способ по п.1 или 2, отличающийся тем, что осуществляют передачу данных положения площадки бурения на осевой линии (23) туннеля на блок (11, 40) управления оператором через интерфейс пользователя и устанавливают навигационную плоскость (19) и начальную точку (30) комплекта шпуров в точку на осевой линии (16) туннеля, указанную оператором.
8. Способ по п.1 или 2, отличающийся тем, что осуществляют измерение местоположения площадки бурения и передачу измерительной информации в блок (11, 40) управления и установку навигационной плоскости (19) и начальной точки (30) комплекта шпуров в измеренном местоположении на осевой линии (16) туннеля.
9. Способ по п.1 или 2, отличающийся тем, что осуществляют ввод данных длины (L) комплекта шпуров в блок (11, 40) управления оператором через интерфейс пользователя.
10. Способ по п.1 или 2, отличающийся тем, что осуществляют определение длины (L) комплекта шпуров в схеме (28) размещения шпуров и ее учет при загрузке данных схемы размещения шпуров в блок (11, 40) управления.
11. Способ по п.1 или 2, отличающийся тем, что осуществляют следующие стадии:
определение углов (G) наклона для осевой линии (16) туннеля в проектной системе (25) координат;
отклонение системы (29) координат схемы размещения шпуров на величину определенного угла (G) наклона с поворотом вокруг прямой линии, параллельной оси yd схемы размещения шпуров, в результате чего ось yd схемы размещения шпуров остается направленной на конечную точку (31) комплекта шпуров, но направления оси xd и оси zd схемы размещения шпуров изменяются на величину угла (G) наклона;
учет влияния отклонения схемы (28) размещения шпуров в преобразовании системы координат.
12. Способ по одному пп.1 или 2, отличающийся тем, что осуществляют следующие стадии:
определение точки (33) поворота вместе с ее координатами в системе координат (26) площадки бурения и в системе (29) координат схемы размещения шпуров;
определение положения системы (29) координат схемы размещения шпуров относительно системы координат (26) площадки посредством точки (33) поворота;
учет влияния точки (33) поворота при преобразовании систем координат.
13. Способ по п.1 или 2, отличающийся тем, что осуществляют следующие стадии:
определение углов (G) наклона для осевой линии (16) туннеля в проектной системе (25) координат;
определение точки (33) поворота вместе с ее координатами в системе (26) координат площадки бурения и в системе (29) координат схемы размещения шпуров;
отклонение системы (29) координат схемы размещения шпуров на величину угла (G) наклона, определенного поворотом вокруг прямой линии, проходящей через точку (33) поворота и параллельной оси yd системы координат схемы размещения шпуров.
14. Способ по п.1 или 2, отличающийся тем, что содержит исполнение стадий, связанных с направлением схемы размещения шпуров в блоке (11) управления буровой установки.
15. Способ по п.1 или 2, отличающийся тем, что содержит исполнение, по меньшей мере, одной из стадий, связанных с направлением схемы размещения шпуров, по меньшей мере, в одном блоке (40) управления, за пределами буровой установки (1) и передачу информации, связанной с направлением схемы размещения шпуров, между блоками (11, 40) управления через канал (41) передачи данных.
16. Способ по п.1 или 2, отличающийся тем, что содержит исполнение стадий, связанных с направлением схемы размещения шпуров, в компьютере проектирования туннеля.
17. Буровая установка, содержащая подвижное транспортное средство (2), по меньшей мере, один бурильный манипулятор (3) и, по меньшей мере, один бурильный блок (5), содержащий направляющую балку (6), установленную на бурильном манипуляторе (3), бурильную машину (8) для горной породы, перемещаемую устройством (7) подачи относительно направляющей балки (6), и инструмент (9), соединяемый с бурильной машиной (8), по меньшей мере, один датчик (14, 15) для определения местоположения и направления бурильного блока (5), по меньшей мере, один блок (11) управления, обеспечивающий исполнение программы расчета кривой, исполнение которой производит следующие операции:
загрузка в блок (11) управления данных осевой линии (16) проходимого туннеля, определенной в проектной системе (25) координат для площадки работ туннеля;
загрузка в блок (11) управления схемы (28) размещения шпуров, определяющей, по меньшей мере, навигационную плоскость (19) и систему (29) координат схемы размещения шпуров;
определение площадки бурения для блока (11) управления и расположение локальной системы (26, 29) координат на площадке бурения так, чтобы одна из осей была направлена в направлении бурения;
установка навигационной плоскости (19) схемы (28) размещения шпуров на площадке бурения;
учет установки буровой установки (1) на площадке бурения и соединение систем координат друг с другом привязкой;
выполнение необходимых преобразований систем координат из проектной системы (25) координат в систему (29) координат схемы размещения шпуров, отличающаяся тем, что исполнение программного продукта, загруженного в блок (11) управления сконфигурировано для дополнительного осуществления следующих операций:
определение формы осевой линии (16) туннеля для секции следующего комплекта шпуров, подлежащего бурению;
расположение начальной точки (30) схемы (28) размещения шпуров на осевой линии (16) туннеля;
определение расстояния, соответствующего длине (L) комплекта шпуров, подлежащих бурению, начинающегося от начальной точки (30), и установка конечной точки (31) комплекта шпуров в конкретной точке заложения на осевой линии (16) туннеля;
направление схемы (28) размещения шпуров из начальной точки (30) в конечную точку (31); и
выполнение преобразований систем координат с учетом определенного направления схемы (28) размещения шпуров и расчет координат и направлений для шпуров (12) согласно схеме размещения шпуров для бурения.
18. Блок управления с программным продуктом для определения направления схемы размещения шпуров для буровой установки, отличающийся тем, что исполнение программного продукта в блоке (11, 40) управления сконфигурировано для осуществления следующих операций:
определение формы осевой линии (16) туннеля для секции следующего комплекта шпуров, подлежащих бурению;
расположение начальной точки (30) схемы (28) размещения шпуров на осевой линии (16) туннеля;
определение конечной точки (31) комплекта шпуров, подлежащих бурению, на осевой линии (16) туннеля по информации о длине (L) комплекта шпуров и форме осевой линии (16) туннеля для секции комплекта шпуров;
направление схемы (28) размещения шпуров из начальной точки (30) в конечную точку (31); и
выполнение преобразований систем координат с учетом определенного направления схемы (28) размещения шпуров.
19. Способ определения направлений систем координат туннеля, содержащий следующие стадии:
загрузка, по меньшей мере, в один блок управления (11, 40) данных осевой линии (16) проходимого туннеля, определенной в первой системе (25) координат;
расположение в блоке (11, 40) управления второй системы (26, 29) координат на площадке бурения так, чтобы одна из ее осей была направлена в направлении бурения;
соединение систем (25; 26, 29) координат друг с другом;
отличающийся тем, что содержит следующие стадии:
определение формы осевой линии (16) туннеля для секции следующего комплекта шпуров, подлежащего бурению, по информации о длине (L) комплекта шпуров;
расположение начальной точки второй системы (26, 29) координат на осевой линии (16) туннеля и определение ее, как начальной точки (30);
определение расстояния, соответствующего длине (L) комплекта шпуров, подлежащего бурению, с началом от начальной точки (30), и расположение конечной точки (31) комплекта шпуров в конкретной точке заложения на осевой линии (16) туннеля;
направление второй системы (26, 29) координат так, чтобы одна из ее осей была направлена из начальной точки (30) в конечную точку (31); и
выполнение преобразований систем координат из первой системы (25) координат во вторую систему (26, 29) координат с учетом определенного направления второй системы (26, 29) координат.
Приоритет: от 20.04.2007 - все пункты формулы изобретения.
| US 4639868 A, 27.01.1987 | |||
| БУРОВОЙ МАНИПУЛЯТОР | 1998 |
|
RU2143067C1 |
| Способ очистки растворимых солей цинка и кадмия от примесей следов других металлов для изготовления люминофоров | 1953 |
|
SU105942A2 |
| JP 11081855 A, 26.03.1999 | |||
| WO 03025341 A1, 27.03.2003 | |||
| ФЕЛЬДМАН В.Я | |||
| И ДР | |||
| Автоматизированные шахтные бурильные установки-буровые роботы | |||
| - М.: Недра, 1989, с.128-150. | |||

