Предпосылки создания изобретения
Область техники, к которой относится изобретение
Данное изобретение относится к технической области транспортировки листов, предпочтительно, используемой в печатающем устройстве.
Предшествующий уровень техники
К печатающему устройству предъявляются жесткие требования, связанные с качеством печати, а в настоящее время - еще и дополнительное требование повышенной точности. Поэтому для точного обнаружения движения листа с тем, чтобы реализовать стабильную транспортировку посредством управления с обратной связью, предпринята попытка захвата поверхности листа датчиком изображения для обнаружения движения транспортируемого листа посредством обработки изображения.
В патенте US №7104710 описан способ обнаружения этого движения листа. Этот способ предусматривает многократный захват изображения, находящегося на поверхности движущегося листа, датчиком изображения для сравнения множества получаемых изображений посредством обработки согласованием с шаблоном для обнаружения расстояния перемещения листа на основании величины перемещения изображений. Датчик того типа, в соответствии с которым изображение, находящееся на листе, захватывается для получения данных изображения с тем, чтобы подвергнуть эти данные обработке изображения для непосредственного обнаружения движения листа, будет именоваться ниже датчиком прямого действия.
Датчику прямого действия требуется большой объем вычислений, необходимых для обработки изображения с целью согласования с шаблоном. Если датчик прямого действия попытается справиться с повышенной скоростью (скоростью печати), то этот датчик прямого действия должен обнаруживать движение за меньшее время, для чего требуется процессор, обладающий очень большими вычислительными возможностями. Следовательно, это обуславливает повышенную стоимость, которая приводит к растущей стоимости печатающего устройства.
Сущность изобретения
Данное изобретение сделано с целью устранения вышеуказанного недостатка. Задача изобретения состоит в том, чтобы дополнительно усовершенствовать обычно применяемое устройство. Конкретная задача состоит в том, чтобы разработать устройство, использующее датчик прямого действия для того, чтобы с его помощью справиться с задачей осуществления движения с более высокой скоростью (ускоренной операции печати), чем в обычном случае. Дополнительная задача данного изобретения состоит в том, чтобы разработать датчик прямого действия для обнаружения информации о перемещении за короткое время, даже когда обрабатывающий модуль обладает меньшими вычислительными возможностями, чем в обычном случае.
Данное изобретение, решающее вышеуказанные вопросы, представляет собой устройство, содержащее механизм, вызывающий движение объекта; блок сбора информации, который собирает информацию, касающуюся величины возбуждения упомянутого механизма; датчик для захвата поверхности объекта с целью сбора данных изображения; обрабатывающий модуль для обработки первых данных изображения и вторых данных изображения, собираемых с использованием датчика в разные моменты времени, и получения таким образом информации о перемещении объекта; и управляющий блок для управления упомянутым механизмом на основании информации о перемещении, полученной с помощью обрабатывающего модуля, при этом обрабатывающий модуль осуществляет обработку: (а) вырезания шаблона изображения области части первых данных изображения; (б) ограничения диапазона поиска во вторых данных изображения, в пределах которых поиск подобной области, которая подобна шаблону изображения, осуществляется на основании информации, собранной блоком сбора информации; (в) поиска упомянутой подобной области в пределах ограниченного диапазона поиска во вторых данных изображения; и (г) получения информации о перемещении объекта на основании позиционной связи между шаблоном изображения в первых данных изображения и упомянутой подобной областью во вторых данных изображения.
Дополнительные признаки данного изобретения станут ясными из нижеследующего описания возможных вариантов осуществления (приводимого со ссылками на прилагаемые чертежи).
Краткое описание чертежей
На фиг.1 представлен вид сверху, иллюстрирующий основную часть печатающего устройства для струйной печати;
на фиг.2 представлено сечение, иллюстрирующее печатающий модуль и транспортирующую систему;
на фиг.3 представлено сечение, иллюстрирующее транспортирующую систему, осуществляющую транспортировку посредством ленты;
на фиг.4 представлен схематический вид, иллюстрирующий расположение кодирующего диска и датчика угла вращения;
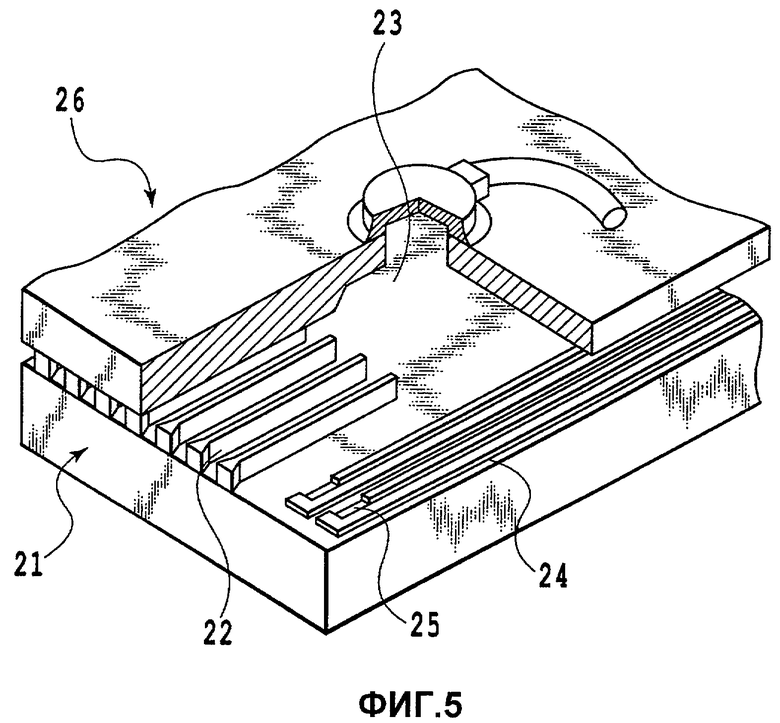
на фиг.5 представлено схематическое перспективное изображение, иллюстрирующее конструкцию печатающей головки;
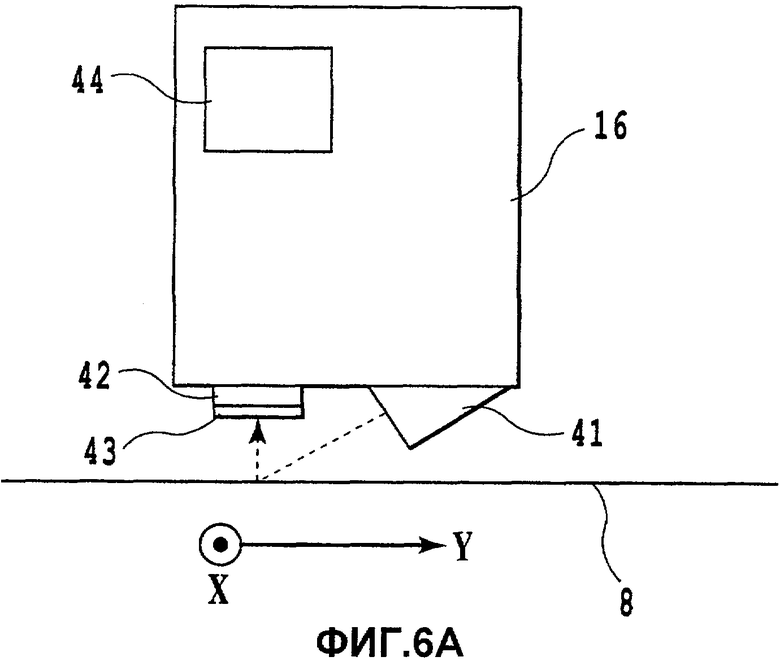
на фиг.6А и 6В представлены схематические виды, иллюстрирующие конфигурацию блока датчика прямого действия;
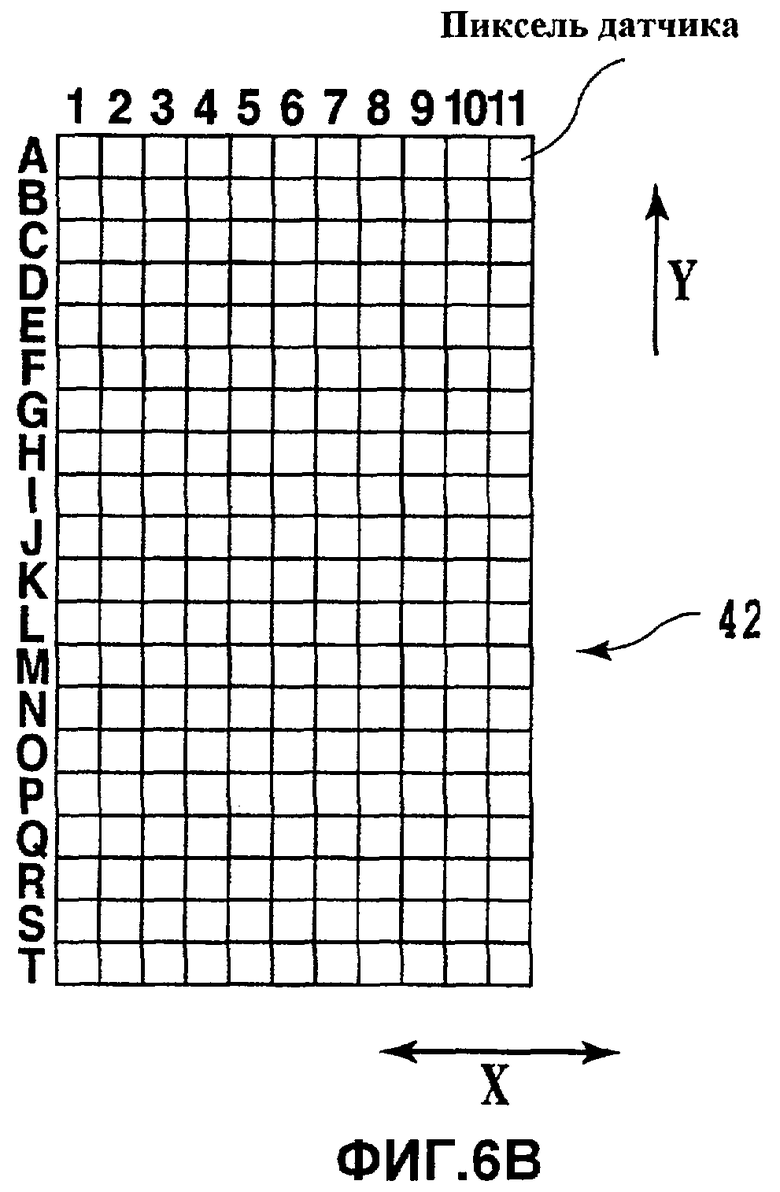
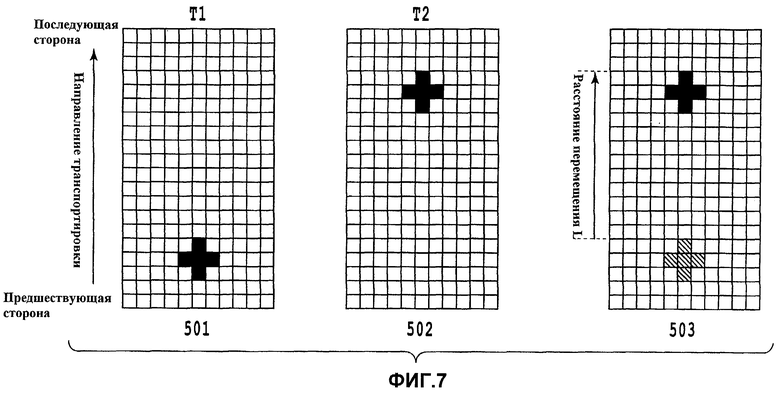
фиг.7 иллюстрирует способ вычисления расстояния перемещения и скорости транспортировки носителя печатаемой информации;
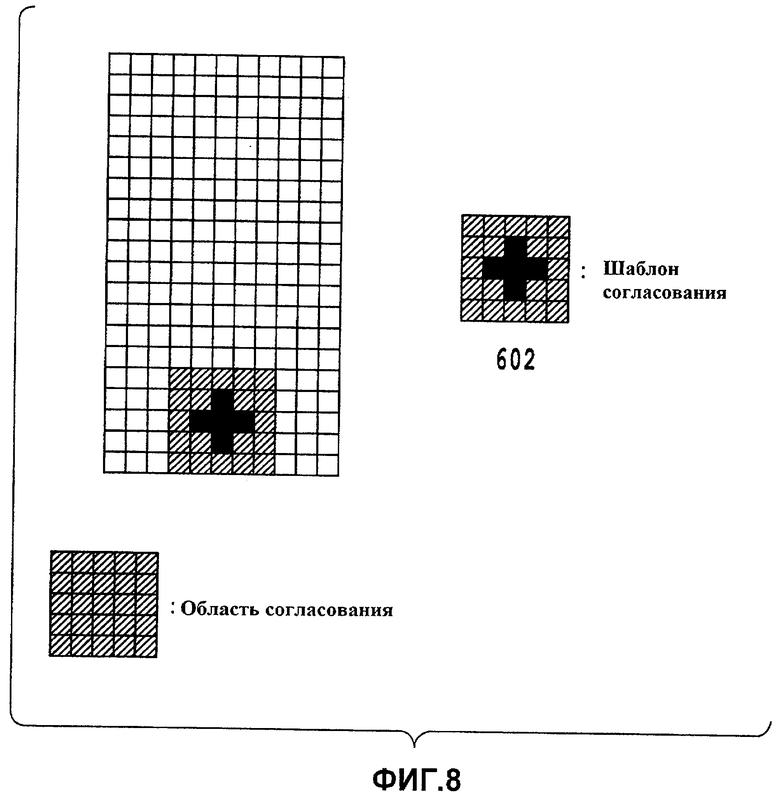
на фиг.8 представлен схематический вид, иллюстрирующий наложение областей согласования на данные изображения;
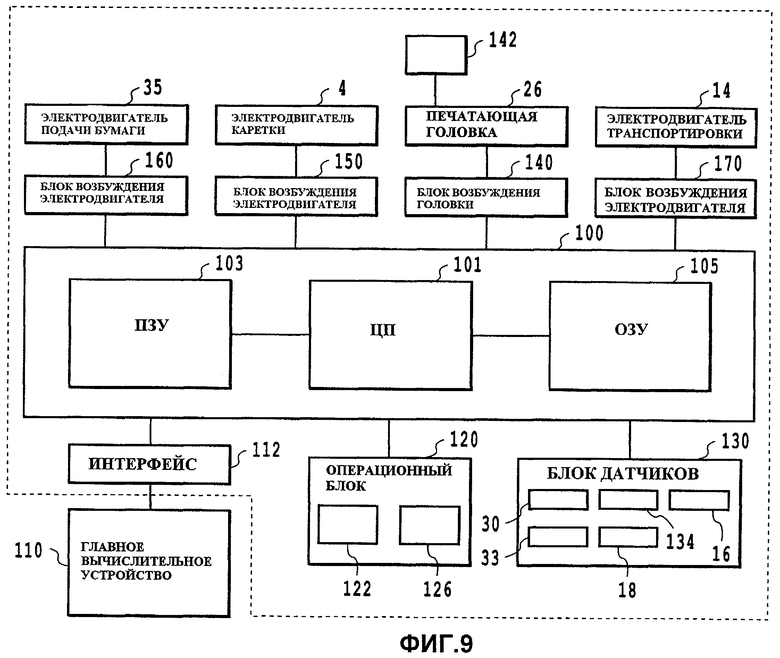
на фиг.9 представлена блок-схема, иллюстрирующая конфигурацию управляющей системы печатающего устройства;
на фиг.10 представлена блок-схема последовательности операций, иллюстрирующая последовательность работы устройства;
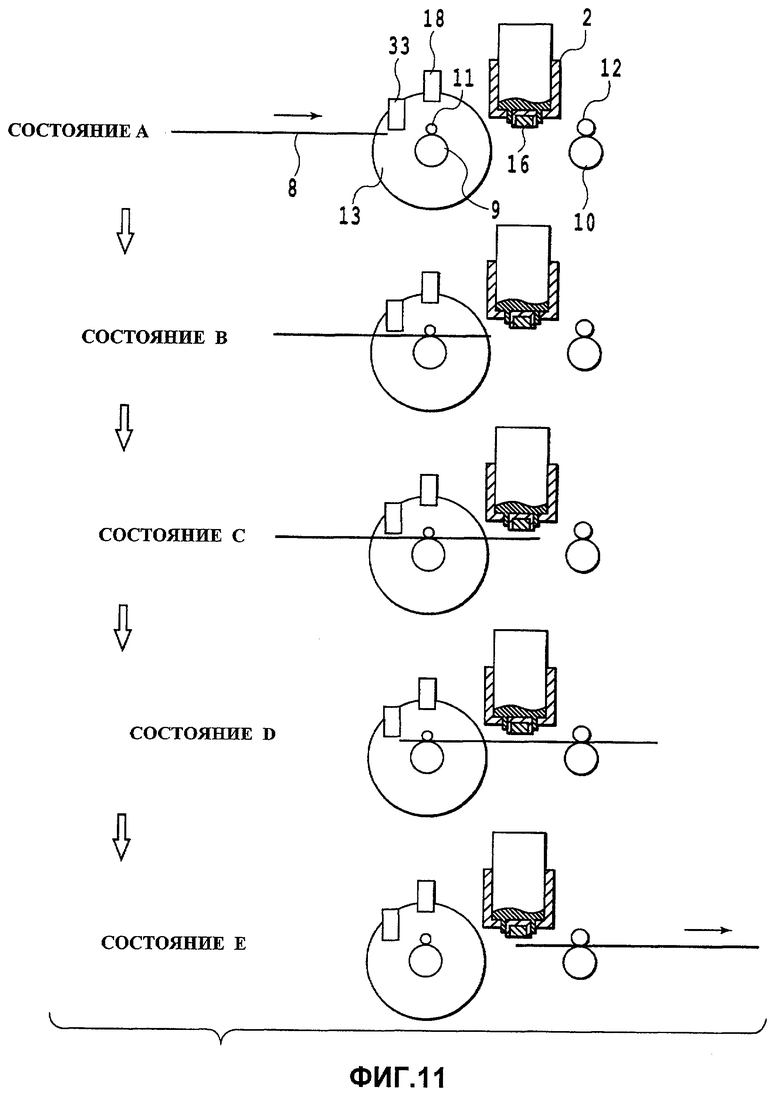
фиг.11 иллюстрирует, как носитель печатаемой информации транспортируется на соответствующих этапах;
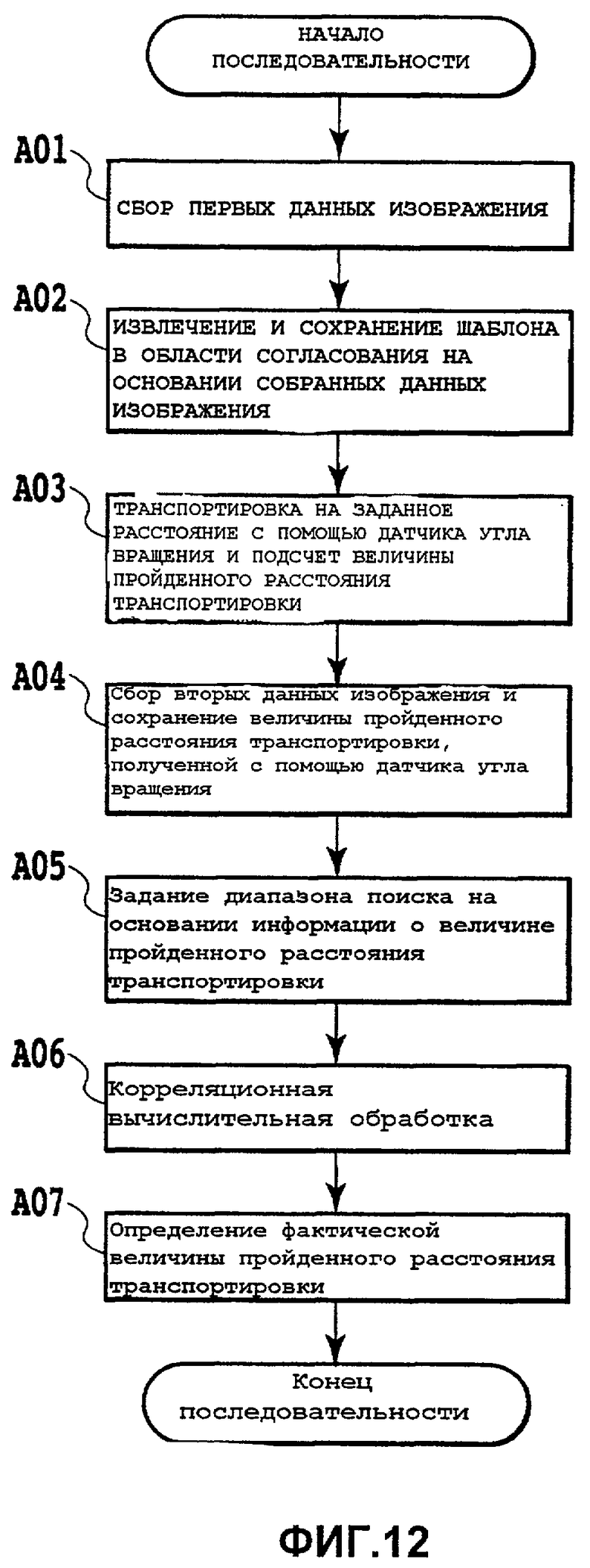
на фиг.12 представлена блок-схема последовательности операций, иллюстрирующая последовательность обнаружения фактического расстояния перемещения в примере 2;
на фиг.13 представлен схематический вид, иллюстрирующий способ вычисления расстояния перемещения для носителя печатаемой информации;
на фиг.14 представлен схематический вид, иллюстрирующий способ задания диапазона поиска;
фиг.15 иллюстрирует процесс корреляционной обработки для вторых данных изображения;
фиг.16 иллюстрирует степени рассогласования, используемые для поиска интервала корреляции;
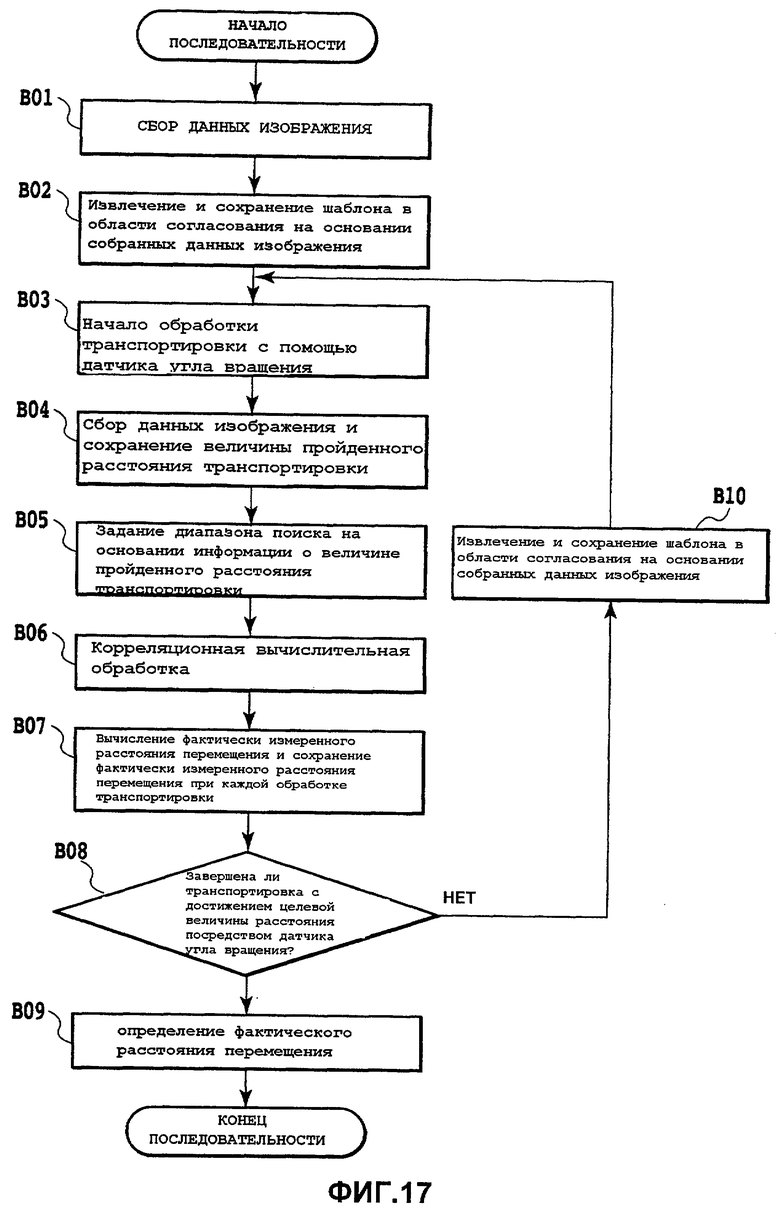
на фиг.17 представлена блок-схема последовательности операций, иллюстрирующая последовательность обнаружения фактического расстояния транспортировки;
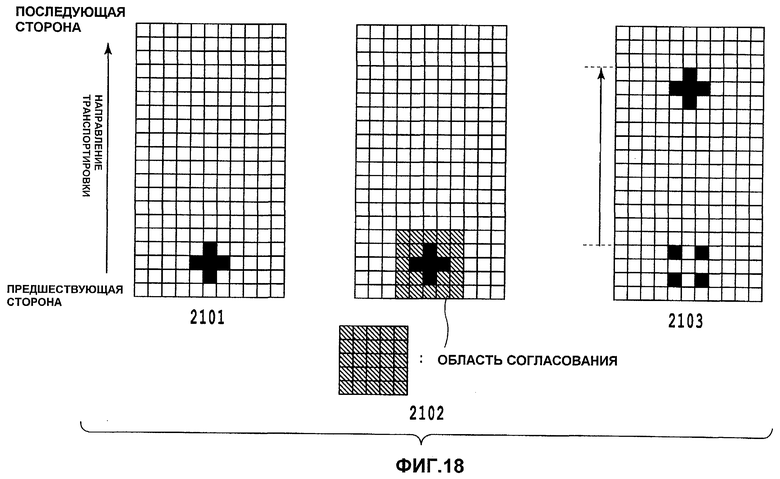
на фиг.18 представлен схематический вид, иллюстрирующий способ вычисления расстояния перемещения для носителя печатаемой информации;
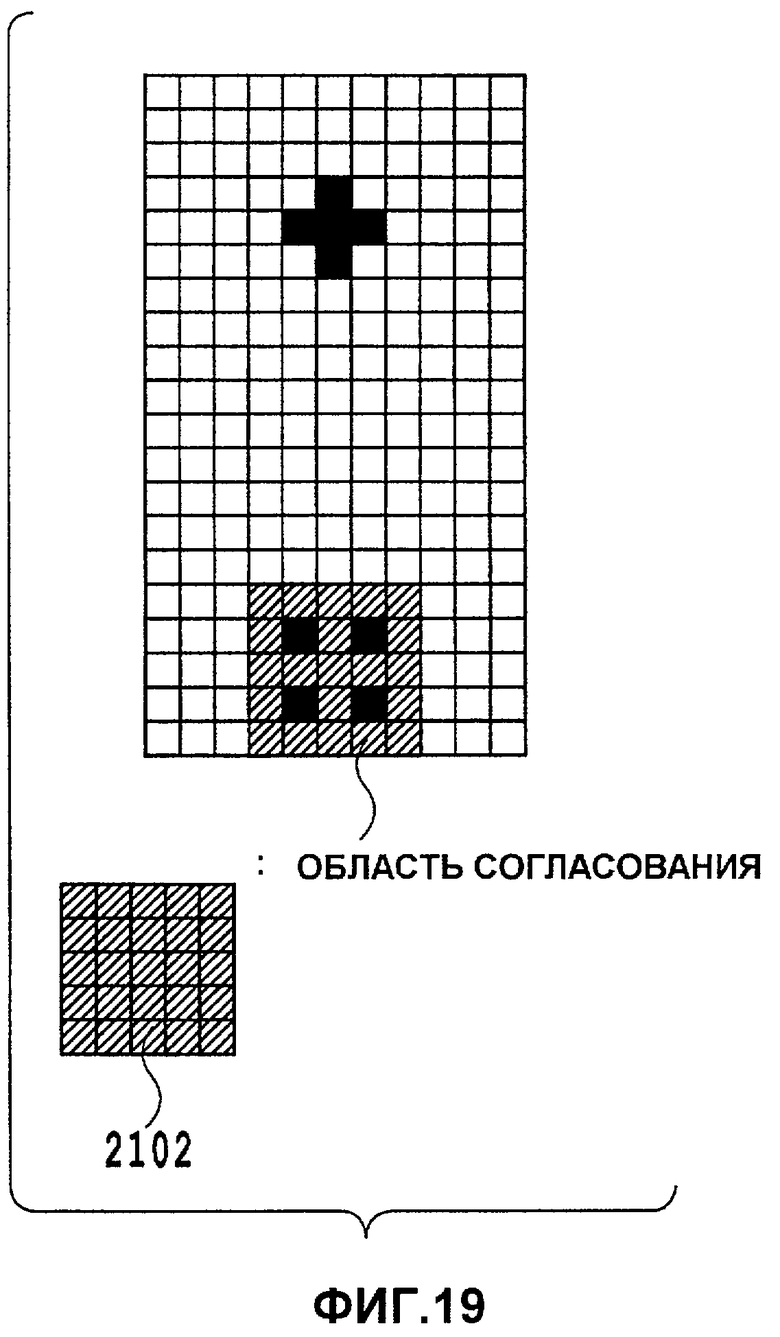
на фиг.19 представлен схематический вид, иллюстрирующий наложение областей согласования на данные изображения;
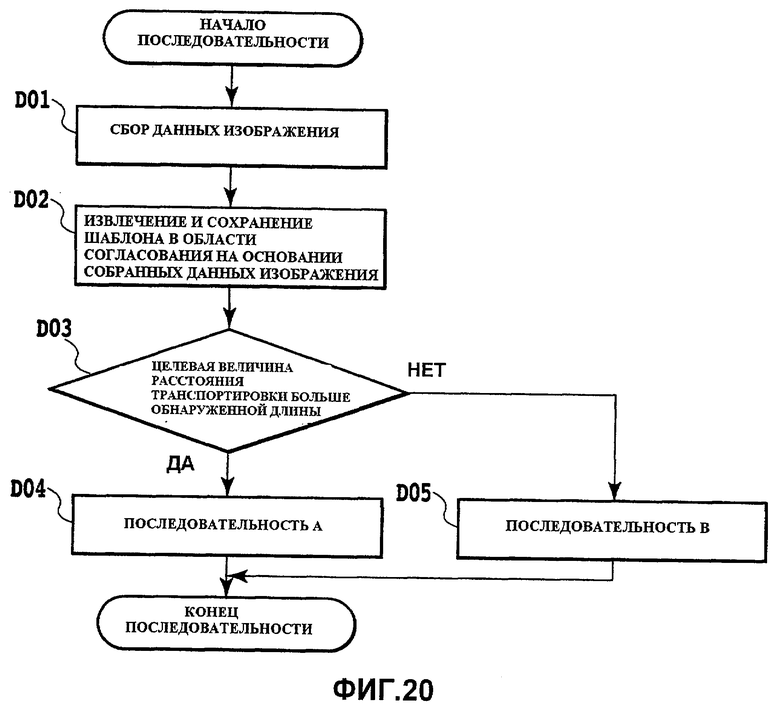
на фиг.20 представлена блок-схема последовательности операций, иллюстрирующая последовательность обнаружения фактического расстояния транспортировки в примере 3; и
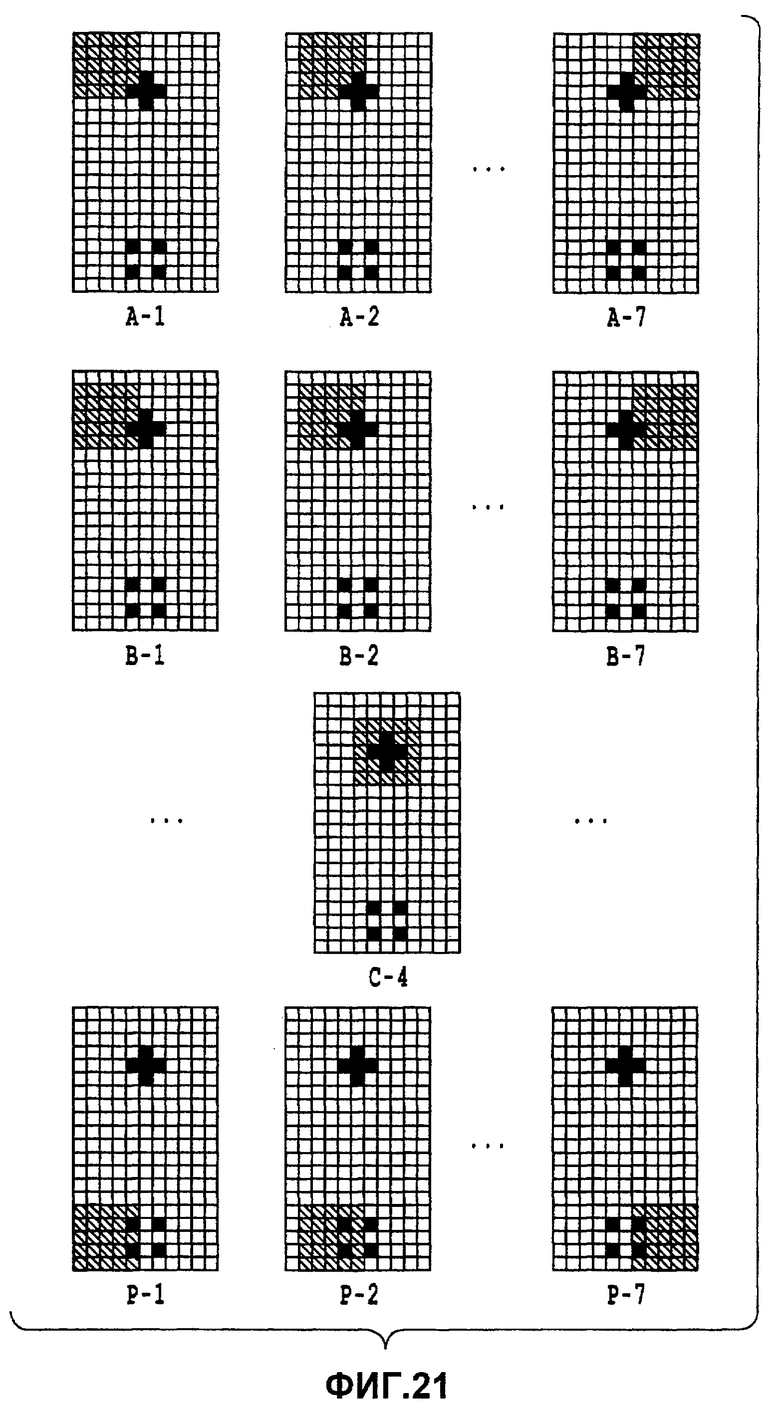
фиг.21 иллюстрирует сравнительный пример, демонстрирующий преимущество варианта осуществления данного изобретения.
Описание вариантов осуществления
Ниже, со ссылками на прилагаемые чертежи, будет описан предпочтительный вариант осуществления данного изобретения. Однако входящие в состав элементы, показанные в иллюстрируемых вариантах осуществления, не ограничивают объем притязаний данного изобретения.
Данное изобретение можно широко применять в области обнаружения движения для точного обнаружения движения листообразного объекта, когда тот находится, например, в печатающем устройстве. Изобретение можно использовать, например, для таких устройств, как печатающее устройство и сканер, а также промышленные и связанные с распределением устройства, например, для транспортировки объекта, предназначенной для того, чтобы подвергать объект различным обработкам в обрабатывающем модуле, например - контролю, считыванию, обработке поверхности и маркировке. Кроме того, когда данное изобретение применяется к принтеру, данное изобретение также можно использовать не только для однофункционального принтера, но также для многофункционального принтера, имеющего, например, функцию копирования и функцию сканирования изображения. Изобретение можно использовать для различных способов печати, таких как способ струйной печати, электрофотографический способ и способ с использованием термопереноса.
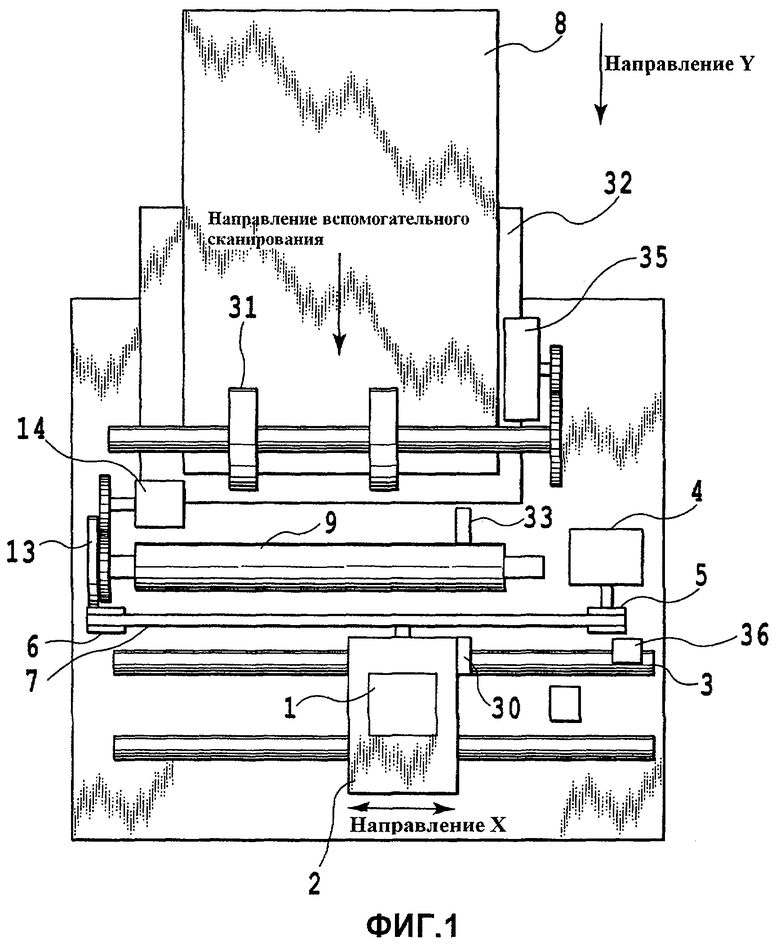
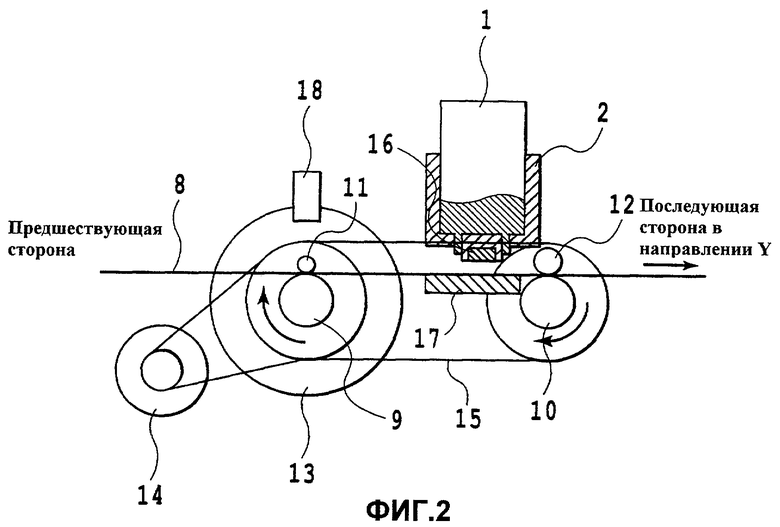
На фиг.1 представлен вид сверху, иллюстрирующий основную часть печатающего устройства для струйной печати в качестве варианта осуществления данного изобретения. На фиг.2 представлено сечение для подробного описания печатающего модуля и транспортирующей системы печатающего устройства.
Носитель 8 печатаемой информации, который может представлять собой листообразные объекты, такие как листы бумаги или тонкие пластиковые пластины, находится в самонакладе 32 для подачи листов. Когда начинается операция печати, приводится в действие двигатель 35 подачи бумаги, и его движущая сила передается подбирающим валикам 31, например, посредством редуктора. Вращение подбирающих валиков 31 вызывает отделение один за другим носителя 8 печатаемой информации от самонаклада 32 для подачи листов и подачу вовнутрь печатающего устройства. Во время этой подачи, датчик 33 бумаги обнаруживает присутствие или отсутствие носителя 8 печатаемой информации, чтобы таким образом определить, правильно ли осуществляется подача бумаги. За счет вращения первого транспортирующего валика 9 как тела вращения происходит транспортировка носителя 8 печатаемой информации, который при этом прилегает к первому транспортирующему валику 9, с заданной скоростью в направлении Y.
Как показано на фиг.2, после первого транспортирующего валика 9 вдоль направления транспортировки предусмотрен второй транспортирующий валик 10. Каждый из соответствующих транспортирующих валиков имеет расположенные с верхней стороны прижимной валик 11 и отводной валик 12 для выталкивания транспортируемого носителя 8 печатаемой информации. Движущая сила вращения транспортирующего электродвигателя 14 передается через шкивный механизм на первый транспортирующий валик 9. Чтобы второй транспортирующий валик 10 вращался синхронно с первым транспортирующим валиком 9, протянута синхронизирующая лента 15. Как описано выше, первый транспортирующий валик 9, расположенный на предшествующей стороне согласно направлению транспортировки, функционирует в качестве главного ведущего валика, а датчик 18 угла вращения имеет конструкцию, обеспечивающую обнаружение вращения главного ведущего валика. В положении, которое находится между двумя вращающимися транспортирующими валиками и которое находится напротив картриджа 1 с головкой в устройстве, предусмотрен бумагоопорный столик 17, состоящий из плоской пластины, для обеспечения опоры проходящего носителя 8 печатаемой информации с нижней стороны. Область печати транспортируемого носителя 8 печатаемой информации обеспечивается таким образом, чтобы она была параллельна грани с выбрасывающими отверстиями печатающей головки 26, чтобы иметь заданное расстояние между ними за счет опоры с нижней стороны посредством бумагоопорного столика 17, как описано выше, и опору с верхней стороны за счет прижимного валика 11 и отводного валика 12. Первый транспортирующий валик 9 скреплен с кодирующим диском 13. Передний транспортирующий валик 9 и кодирующий диск 13 имеют общую ось вращения. Датчик 18 угла вращения представляет собой средство кодирования по углу вращения для обнаружения угла вращения кодирующего диска 13.
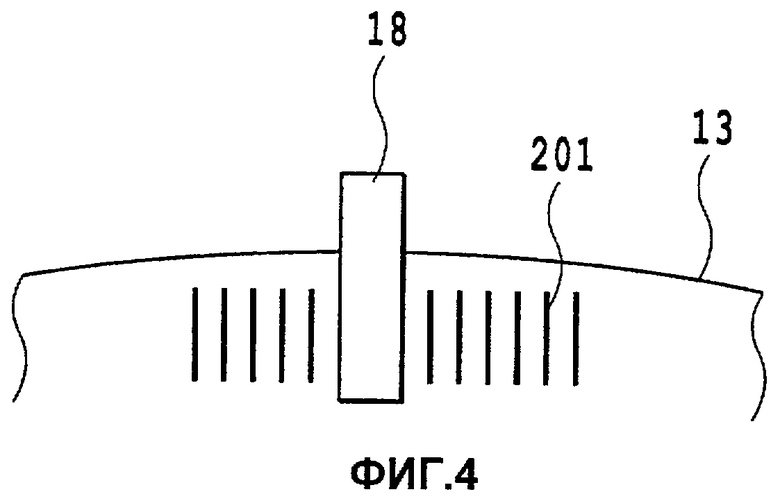
На фиг.4 представлен схематический вид, иллюстрирующий расположение кодирующего диска 13 и датчика 18 угла вращения. На окружности кодирующего диска 13 через одинаковый интервал предусмотрены щели 201. Датчик 18 угла вращения предусмотрен в положении, в котором проходят щели 201. Датчик 18 угла вращения является светопропускающим датчиком, который обнаруживает движущиеся щели 201, передавая импульсный сигнал в момент обнаружения. С помощью этого импульсного сигнала обнаруживают угол вращения кодирующего диска 13. На основании временного интервала, в котором передается импульсный сигнал, вычисляют, например, положение носителя печатаемой информации и скорость транспортировки. В частности, в этом варианте осуществления средство кодирования по углу вращения, состоящее из кодирующего диска 13 и датчика 18 угла вращения, функционирует как средство сбора информации, предназначенное для сбора информации, касающейся величины расстояния, обуславливаемого приводом транспортирующего валика. На основании информации, получаемой средством сбора информации, можно косвенным путем вычислить величину расстояния транспортировки и/или скорость транспортировки носителя печатаемой информации.
На фиг.1 также показано, что каретка 2 направляется направляющим валом 3 и опирается на него, при этом направляющий вал 3 предусмотрен в корпусе устройства, чтобы тем самым обеспечить возвратно-поступательное движение в направлении Х, вдоль которого простирается направляющий вал 3. Сила, обуславливающая движение каретки 2, получается за счет передачи движущей силы электродвигателя 4 каретки, например, шкиву 5 каретки, ведомому шкиву 6 и синхронизирующей ленте 7. Каретка 2 включает в себя датчик 30 исходного положения. Когда датчик 30 исходного положения проходит блокировочную пластину 36, расположенную в исходном положении, он может обнаружить, что каретка 2 находится в исходном положении.
Картридж 1 с головкой, предусмотренный в каретке 2, включает в себя печатающую головку 27 для выброса чернил, действие которой основано на способе струйной печати, и резервуар для чернил, предназначенный для хранения чернил, подаваемых в печатающую головку 26. Конструкция печатающей головки 26 обеспечивает выброс - при ее движении вместе с кареткой 2 в направлении Х - чернил на носитель 8 печатаемой информации, движущийся по нижней стороне, в заданный момент времени и на основе сигнала изображения. На фиг.5 представлено схематическое перспективное изображение, иллюстрирующее часть конструкции печатающей головки 26. Печатающая головка 26, используемая в этом варианте осуществления, включает в себя множество электротермических преобразующих элементов для генерирования тепловой энергии и имеет механизм, посредством которого генерируемая тепловая энергия используется для выброса чернил. Грань 21 с выбрасывающими отверстиями, расположенная напротив носителя печатаемой информации с поддержанием фиксированного расстояния между ними, имеет множество выбрасывающих отверстий 22, расположенных с заданным шагом. Чернила, подаваемые из резервуара с чернилами, хранятся в общей камере 23 и впоследствии вводятся во множество каналов 24 чернил, сообщающихся с отдельными выбрасывающими отверстиями 22 ввиду капиллярного притяжения. В отдельных каналах 24 чернил части, близкие к выбрасывающим отверстиям 22, имеют электротермические преобразующие элементы 25 для генерирования тепловой энергии. Электротермические преобразующие элементы 25 принимают заданный импульс на основании сигнала изображения, а результирующее тепло вызывает пленочное кипение чернил в канале 24 чернил. Результирующее давление вспенивания вызывает выброс заданного количества чернил через выбрасывающие отверстия 22. Способ струйной печати не ограничивается использованием тепловой энергии, а также может быть, например, способом выброса чернил с помощью пьезоэлектрического элемента.
Печатающее устройство согласно этому варианту осуществления является печатающим устройством последовательного типа для струйной печати. Направление, вдоль которого расположены выбрасывающие отверстия 22, является направлением, пересекающимся с направлением движения каретки 2 (направлением Y). Изображение формируется на носителе 8 печатаемой информации за счет попеременного повторения сканирования при печати для выброса чернил через выбрасывающие отверстия 22 во время возвратно-поступательного движения каретки 2 и операции транспортировки для вращения первого транспортирующего валика 9 и второго транспортирующего валика 10, чтобы таким образом осуществлять шаговую транспортировку на заданное расстояние носителя печатаемой информации в направлении Y. В альтернативном варианте можно также использовать другой способ печати, при котором каретка 2 совершает возвратно-поступательное движение в направлении Х одновременно с непрерывной и плавной транспортировкой носителя печатаемой информации.
Боковая грань каретки 2 имеет блок 16 датчика прямого действия для захвата поверхности носителя 8 печатаемой информации с целью прямого измерения величины расстояния транспортировки на основании обработки изображения. Блок 16 датчика прямого действия может быть предусмотрен в любом положении, при условии, что его область измерения охватывает положения, где проходит носитель печатаемой информации. Блок 16 датчика прямого действия может быть предусмотрен, например, на стороне бумагоопорного столика 17, показанного на фиг.2, для обнаружения обратной стороны носителя печатаемой информации.
На фиг.6А и 6В представлены схематические виды, иллюстрирующие конфигурацию блока 16 датчика прямого действия. Блок 16 датчика прямого действия включает в себя светоизлучающий элемент 41 и захватывающий изображение элемент 42, который принимает свет, излучаемый из светоизлучающего элемента 41 и отражаемый от носителя 8 печатаемой информации через оптическую систему 43. Захватывающий изображение элемент 42 может быть датчиком линии или датчиком области, имеющим множество фотоэлектрических преобразующих элементов, таких как прибор с зарядовой связью (ПЗС) или прибор со структурой «металл-окисел-полупроводник» (МОП-прибор). Предполагается, что захватывающий изображение элемент 42 согласно этому варианту осуществления имеет конструкцию, в которой фотоэлектрические преобразующие элементы, каждый из которых имеет горизонтальный и вертикальный размеры по 10 мкм, расположены двухмерным образом так, что эти фотоэлектрические преобразующие элементы предусмотрены в 11-ти строках в горизонтальном направлении и 20 столбцах в вертикальном направлении, как показано на фиг.6В. В этом примере оптическая система 43 и захватывающий изображение элемент 42 выполнены имеющими оптическое увеличение х1. В частности, область, обнаруживаемая фотоэлектрическим преобразующим элементом, соответствует области носителя печатаемой информации, имеющей горизонтальную и вертикальную длины по 10 мкм. Данные изображения, захватываемого фотоэлектрическим преобразующим элементом 42, подвергаются заданной обработке аналоговым устройством 44 предварительной обработки данных, а затем передаются в контроллер, находящийся в корпусе печатающего устройства.
Термин «собранные данные изображения» в данной заявке означает данные изображения, которые характеризуют состояние частичной поверхности носителя 8 печатаемой информации и основаны на входных значениях, получаемых в результате захвата посредством захватывающего изображение элемента 42. Например, собранные данные изображения могут быть информацией, отображающей затенение, появляющееся из-за формы поверхности носителя 8 печатаемой информации (например, рисунок волокон бумаги или рисунок, отпечатанный на поверхности заранее).
Фиг.7 иллюстрирует способ вычисления расстояния перемещения и скорости транспортировки носителя 8 печатаемой информации с помощью обрабатывающего модуля контроллера в два разных момента Т1 и Т2 времени, основанный на данных изображения, получаемых блоком 16 датчика прямого действия. Ссылочная позиция 501 обозначает первые данные изображения, получаемые в момент Т1 времени за счет того, что обеспечивается обнаружение транспортируемого носителя печатаемой информации блоком 16 датчика прямого действия. При получении таких данных изображения обрабатывающий модуль контроллера накладывает область 601 согласования на данные 501 изображения. Область 601 согласования имеет заданный размер.
На фиг.8 представлен схематический вид, иллюстрирующий наложение области согласования на данные 501 изображения. В этом варианте осуществления, область согласования имеет область размером 5 пикселей × 5 пикселей. Характеристический шаблон (крестообразный шаблон в этом случае), который присутствует на поверхности носителя 8 печатаемой информации, размещают в области согласования. После этого обрабатывающий модуль контроллера извлекает данные изображения в области согласования, и сохраняет эти данные как шаблон 602 согласования.
На фиг.7 ссылочная позиция 502 обозначает вторые данные изображения, которые получаются за счет того, что блок 16 датчика прямого действия обеспечивает обнаружение в момент Т2 времени, отличающийся от момента Т1 времени, поверхности транспортируемого носителя печатаемой информации. Обрабатывающий модуль контроллера вызывает последовательное перемещение области согласования относительно вторых данных изображения с целью поиска и обнаружения положения, наиболее похожего на заранее сохраненное положение шаблона 602 согласования. Тогда, на основании расстояния L между положением шаблона согласования в первых данных 501 изображения и положением шаблона согласования во вторых данных 502 изображения, получают расстояние перемещения, в пределах которого перемещался носитель 8 печатаемой информации с момента Т1 времени до момента Т2 времени. В альтернативном варианте скорость перемещения носителя 8 печатаемой информации также можно вычислить на основании разности между моментом Т1 времени и моментом Т2 времени. В этом случае и в этом варианте осуществления, чтобы вычислить расстояние L быстрее, область, в пределах которой вызывается последовательное перемещение области согласования относительно вторых данных 502 изображения, ограничивают. Этот способ будет подробнее описан ниже.
Помимо измерения информации о перемещении носителя печатаемой информации, блок 16 датчика прямого действия также можно использовать для другой цели - определения присутствия или отсутствия носителя печатаемой информации на основании значения обнаружения, получаемого блоком 16 датчика прямого действия (например, среднего значения выходных сигналов вокруг пикселей).
На фиг.9 представлена блок-схема, иллюстрирующая конфигурацию управляющей системы печатающего устройства. Показанный на фиг.9 контроллер 100 является главным контроллером печатающего устройства. Контроллер 100 имеет, например, центральный процессор (ЦП) 101 в виде микроконтроллера, постоянное запоминающее устройство (ПЗУ) 103, в котором хранятся фиксированные данные, такие как программа или заданная таблица, и оперативное запоминающее устройство (ОЗУ) 105, включающее в себя, например, область для проявления данных изображения и область для работы. Главное вычислительное устройство 110 представляет собой устройство, которое соединено с наружной поверхностью печатающего устройства и которое функционирует как источник подачи изображения. Главное вычислительное устройство 110 может быть компьютером, который подготавливает или обрабатывает данные, связанные с печатью, такие как изображение, или может быть также считывающим устройством для считывания изображения.
Из главного вычислительного устройства 110 в контроллер 100 через интерфейс (ИФ) 112 можно передавать, например, данные изображения, команду или сигнал состояния либо принимать их из упомянутого контроллера через упомянутый интерфейс в это устройство. Операционный блок 120 состоит из группы переключателей, посредством которых принимается вводимая оператором инструкция. Операционный блок 120 имеет переключатель 122 источника питания и переключатель 126 восстановления, с помощью которых предписывается, например, начало восстановления поглощения. Блок 130 датчиков состоит из группы датчиков для определения состояния устройства. В этом варианте осуществления блок 130 датчиков включает в себя вышеописанный датчик 30 исходного положения, датчик 33 бумаги, блок 16 датчика прямого действия и датчик 18 угла вращения для обнаружения величины расстояния транспортировки, а также датчик 134 температуры для обнаружения, например, температуры окружающей среды.
Ссылочная позиция 140 обозначает блок возбуждения головки, который возбуждает электротермические преобразующие элементы 25 печатающей головки 26 в зависимости от данных печати. Блок 140 возбуждения головки включает в себя регистр сдвига, в котором данные печати расположены таким образом, что обеспечивается их соответствие множеству электротермических преобразующих элементов 25, и схему-защелку, срабатывающую в подходящий момент времени. Блок 140 возбуждения головки также включает в себя элемент логической схемы, который вызывает синхронное с сигналом синхронизации возбуждения срабатывание электротермических преобразующих элементов 25, и модуль задания синхронизации, предназначенный для надлежащего задания времени разрядки с целью регулирования, например, положений точек на носителе печатаемой информации.
В окрестности печатающей головки 26 предусмотрен вспомогательный нагреватель 142, который регулирует температуру печатающей головки 26 с тем, чтобы стабилизировать характеристику выброса чернил. Вспомогательный нагреватель 142 может быть предусмотрен на подложке печатающей головки 26 в электротермическом преобразующем элементе 25 или может быть также прикреплен к корпусу печатающей головки 26 или картриджа 1 с печатающей головкой. Ссылочная позиция 150 обозначает блок возбуждения электродвигателя, предназначенный для возбуждения электродвигателя 4 каретки. Ссылочная позиция 160 обозначает блок возбуждения электродвигателя, предназначенный для возбуждения электродвигателя 35 подачи бумаги. Ссылочная позиция 170 обозначает блок возбуждения электродвигателя, предназначенный для управления возбуждением электродвигателя 14 транспортировки.
В вышеописанном печатающем устройстве носитель печатаемой информации транспортируется в положениях первого транспортирующего валика 9 и второго транспортирующего валика 10, соответственно, будучи заключенным между ними. Можно использовать и другой механизм транспортировки носителя печатаемой информации, в котором носитель печатаемой информации удерживается лентой и переносится лентой. Этот ленточный транспортирующий механизм имеет вращающиеся валики, предусмотренные во множестве положений, и ленту, простирающуюся среди множества вращающихся валиков. Вращение вращающихся валиков приводит к вращению ленты, тем самым вызывая движение носителя печатаемой информации, находящегося на ленте. Средство сбора информации собирает информацию, касающуюся величины угла вращения вращающегося валика или вращающегося зубчатого колеса среди множества вращающихся валиков или зубчатых колес. Однако эта информация не ограничивается информацией, касающейся только одного вращающегося валика или только одного вращающегося зубчатого колеса. Эта информация также может быть информацией касающейся множества вращающихся валиков или множества вращающихся зубчатых колес.
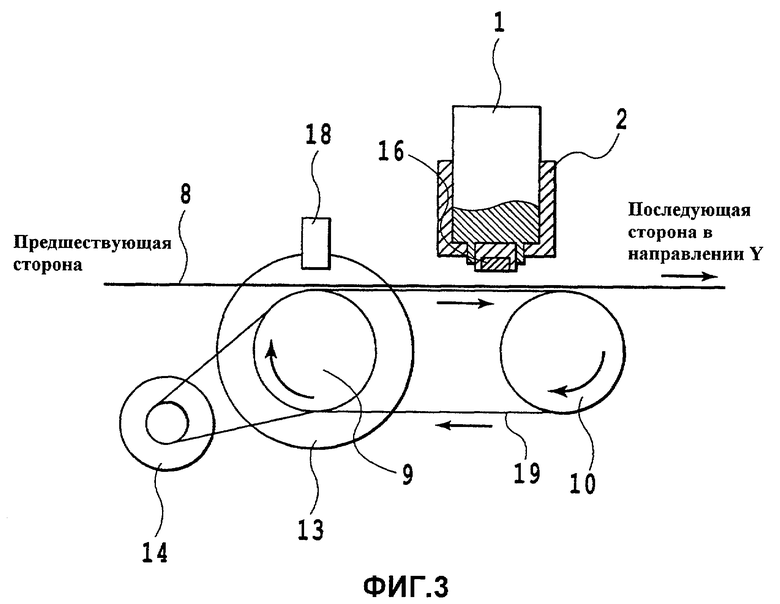
На фиг.3 представлен схематический вид, иллюстрирующий конфигурацию печатающего устройства, включающего в себя ленточный транспортирующий механизм. На фиг.3 те же элементы, что на фиг.2, обозначены теми же ссылочными позициями. Печатающее устройство включает в себя первый транспортирующий валик 9 и второй транспортирующий валик 10 в качестве вращающихся валиков. Первый транспортирующий валик 9 и второй транспортирующий валик 10 имеют между собой ленту 19, проходящую между ними. Лента 19 имеет ширину, которая больше, чем ширина максимального листа среди используемых листов. Когда первый транспортирующий валик 9 воспринимает движущую силу от электродвигателя 14 транспортировки, этот транспортирующий валик 9 вращается, вызывая вращение ленты 19 между валиками в направлении, показанном стрелкой, а также приведение во вращение второго транспортирующего валика 10. Как описано выше, первый транспортирующий валик 9, находящийся на предшествующей стороне в направлении транспортировки, функционирует как главный ведущий валик, а датчик 18 угла вращения обнаруживает вращение главного ведущего валика.
Лента 19 имеет носитель 8 печатаемой информации, располагаемый на ней таким образом, что этот носитель 8 печатаемой информации оказывается плотно уложенным на ленте 19 за счет электростатической адсорбции. Носитель 8 печатаемой информации транспортируется в соответствии с вращением ленты 19 - т.е. с предшествующей стороны к последующей стороне в показанном направлении Y. Блок 16 датчика прямого действия, предусмотренный в каретке 2, захватывает поверхность носителя 8 печатаемой информации или поверхность ленты 19, таким образом собирая данные изображения. Датчик прямого действия может быть предусмотрен на тыльной стороне ленты для обнаружения внутренней поверхности ленты. Носитель 8 печатаемой информации надежно удерживается на ленте 19 за счет электростатической адсорбции и вследствие этого, по существу, не может скользить или спадать с ленты 19. Таким образом, захват ленты 19 для вычисления движения ленты эквивалентен вычислению движения носителя 8 печатаемой информации.
Далее, в следующем разделе будет описан способ использования вышеописанного устройства на более высокой скорости, чем в обычном случае, с использованием информации о транспортировке, полученной из датчика 18 угла вращения, и информации о транспортировке, полученной из блока 16 датчика прямого действия, в соответствии с несколькими примерами.
Пример 1
На фиг.10 представлена блок-схема последовательности операций, иллюстрирующая обработку, осуществляемую посредством ЦП 101 при управлении транспортировкой носителя печатаемой информации в этом варианте осуществления. Фиг.11 иллюстрирует состояние транспортировки носителя печатаемой информации на соответствующих этапах, показанных в блок-схеме последовательности операций.
Когда операция печати начинается на основании команды начала печати из главного вычислительного устройства 110, ЦП 101 обеспечивает возбуждение электродвигателя 35 подачи бумаги с целью подачи одного носителя 8 печатаемой информации из самонаклада 32 для подачи листов (этап 1). Далее, на этапе 2 ЦП 101 должен определить, обнаружил датчик 33 бумаги конец носителя 8 печатаемой информации или нет. Когда определяется, что конец носителя 8 печатаемой информации обнаружен, обработка переходит к этапу 3. Когда определяется, что конец носителя 8 печатаемой информации еще не обнаружен на этапе 2, обработка возвращается к этапу 1, и операция подачи бумаги продолжается. После этого этап 1 и этап 2 повторяются до тех пор, пока будет обнаружен носитель 8 печатаемой информации. Состояние А на фиг.11 представляет собой состояние, в котором конец носителя 8 печатаемой информации достигает положения непосредственно перед датчиком 33 бумаги.
На этапе 3 ЦП 101 начинает возбуждение электродвигателя 14 транспортировки и одновременно с помощью датчика 18 угла вращения начинает обнаружение величины угла вращения кодирующего диска 13. В результате носитель 8 печатаемой информации транспортируется в направлении Y на основании информации из датчика 18 угла вращения. Это будет конкретно пояснено ниже. ЦП 101 определяет величину угла вращения и скорость вращения транспортирующего валика 9 в момент времени, когда датчик 18 угла вращения обнаруживает щель, сформированную в кодирующем диске 13. Тогда управляющий блок осуществляет управление транспортировкой с обратной связью по этой фактической измеренной величине при возбуждении электродвигателя 14 транспортировки.
Далее, на этапе 4, ЦП 101 определяет, обнаружил блок 16 датчика прямого действия носитель 8 печатаемой информации или нет. Когда определяется, что блок 16 датчика прямого действия обнаружил носитель 8 печатаемой информации, обработка переходит к этапу 5, и реализуется последовательность определения фактически измеренной величины (которая будет описана ниже). С другой стороны, когда определяется, что блок 16 датчика прямого действия еще не обнаружил носитель 8 печатаемой информации, обработка возвращается к этапу 3. Затем этап 3 и этап 4 повторяются до тех пор, пока блок 16 датчика прямого действия не обнаруживает носитель 8 печатаемой информации. Состояние В на фиг.11 представляет собой состояние транспортировки перед моментом времени, когда конец носителя 8 печатаемой информации обнаруживается блоком 16 датчика прямого действия. Состояние С представляет собой состояние, в котором конец носителя 8 печатаемой информации обнаруживается блоком 16 датчика прямого действия и реализуется последовательность обнаружения фактической величины расстояния транспортировки.
На фиг.10 также показано, что когда последовательность обнаружения фактической величины расстояния транспортировки согласно этапу 5 дает фактическую величину расстояния транспортировки (т.е. 130 мкм), ЦП 101 сравнивает это значение с измеренной и сохраненной с помощью датчика угла поворота величиной пройденного расстояния транспортировки (например, 120 мкм), чтобы таким образом определить, имеется ли величина перемещения, между ними, которая равна допустимому диапазону либо превышает его, или нет. Когда величина перемещения находится в пределах допустимого диапазона, обработка переходит к этапу 7. С другой стороны, когда величина перемещения превышает допустимый диапазон, обработка переходит к этапу 10 для осуществления коррекционной обработки, соответствующей величине перемещения. В этом примере перемещение составляет 10 мкм, и осуществляется корректирующая обработка, соответствующая 10 мкм. Эта корректирующая обработка может быть достигнута путем сдвига момента времени остановки операции транспортировки для регулирования величины расстояния транспортировки, путем выполнения транспортировки заново или путем перемещения данных печати в направлении Y, при этом без изменения транспортировки носителя печатаемой информации при этом. В альтернативном варианте, в случае конфигурации, при котором положение каретки 2 или печатающей головки можно точно переместить в направлении Y, можно также перемещать каретку 2 или печатающую головку. После завершения корректирующей обработки обработка переходит к этапу 7.
На этапе 7 ЦП 101 использует печатающую головку 26 для осуществления операции печати одной строки на основании данных изображения, заставляя при этом каретку 2 двигаться в направлении Х. Затем, на этапе 8, ЦП 101 определяет, завершена печать данных изображения для одной страницы или нет. Когда определяется, что остаются еще не напечатанные данные изображения, обработка возвращается к этапу 5, чтобы подвергнуть следующую строку воздействию последовательности обнаружения фактической величины расстояния транспортировки. На этапе 8 последовательность обнаружения фактической величины расстояния транспортировки и операция печати, описанные выше, повторяются до тех пор, пока не завершается печать данных изображения для одной страницы. Состояние D на фиг.11 представляет собой состояние заключительной стадии, на которой с помощью датчика 18 угла вращения получают информацию, касающуюся величины пройденного расстояния транспортировки. Если на этапе 8 определяется, что печать данных изображения для одной страницы завершена, то на этапе 9 осуществляется обработка вывода бумаги, и этим вся обработка завершается. Состояние Е на фиг.11 представляет собой состояние, в котором осуществляется операция вывода бумаги.
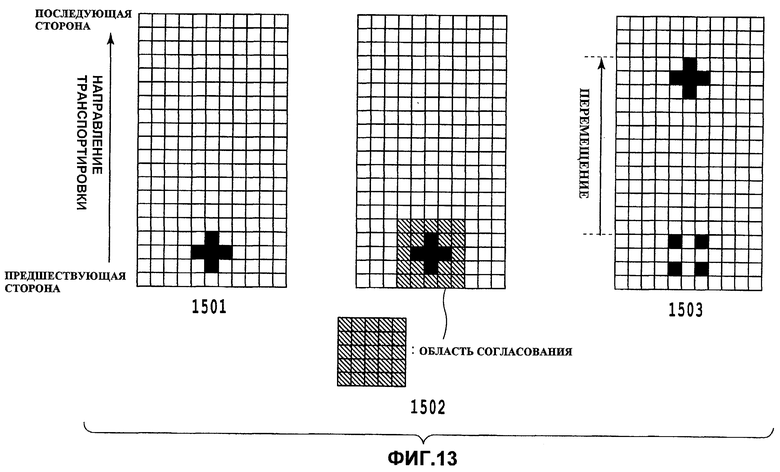
Далее, в нижеследующем разделе будет подробно описана последовательность обнаружения фактического расстояния транспортировки, осуществляемая на этапе 5. На фиг.12 представлена блок-схема последовательности операций, иллюстрирующая соответствующие этапы последовательности обнаружения фактического расстояния транспортировки. На фиг.13 представлен схематический вид, который иллюстрирует осуществляемый на основе данных изображения, полученных из блока 16 датчика прямого действия, способ вычисления информации, касающейся перемещения носителя 8 печатаемой информации (величины движения или скорости). Описание в нижеследующем разделе будет приведено со ссылками на фиг.12 и фиг.13.
Когда начинается последовательность обнаружения фактического расстояния транспортировки, ЦП 101 на этапе А01 использует блок 16 датчика прямого действия для сбора данных изображения носителя 8 печатаемой информации в качестве первых данных (1501) изображения. Когда блок 16 датчика прямого действия в конфигурации согласно фиг.3 используется для отображения поверхности ленты 19, первые данные изображения и вторые данные изображения представляют собой изображения поверхности ленты.
ЦП 101 на этапе А02 вызывает расположение области согласования, имеющей область 5 пикселей × 5 пикселей, в подходящем положении на стороне, предшествующей первым данным 1501 изображения. На фиг.13 показан пример, в котором область 1502 согласования размещена таким образом, что имеет характеристический шаблон (крестообразный шаблон в этом случае), который присутствует на поверхности носителя 8 печатаемой информации. Крестообразный шаблон является просто условным шаблоном для иллюстрации, и он не всегда используется в реальном случае. После этого ЦП 101 извлекает данные изображения, заключенные в области согласования, и сохраняет эти данные в качестве шаблона согласования (часть шаблона изображения в первых данных изображения). Как описано выше, обработка на этапе А02 - это обработка для срезания шаблона изображения области части первых данных изображения.
На этапе А03 происходит основанная на информации из датчика 18 угла вращения (т.е. с учетом величины фактически измеренного пройденного расстояния транспортировки, получаемой из датчика 18 угла вращения) транспортировка носителя 8 печатаемой информации на целевое расстояние (перемещение на один шаг) в направлении Y, и эта величина пройденного расстояния транспортировки (расстояние движения) сохраняется. В этом примере предполагается, что величина фактически измеренного пройденного расстояния транспортировки, получаемая из датчика 18 угла вращения, составляет 120 мкм.
На этапе А04 ЦП 101 использует блок 16 датчика прямого действия для получения изображения носителя 8 печатающей информации (или ленты 19) в качестве вторых данных (1503) изображения в момент времени, отличающийся от момента времени сбора первых данных изображения.
На этапе А05 происходит основанное на величине (120 мкм) пройденного расстояния транспортировки, сохраненного на этапе А03, задание области (диапазона поиска), которая предназначена для осуществления обработки с целью поиска шаблона согласования во вторых данных 1503 изображения и которая представляет собой ограниченную область в полной области изображения.
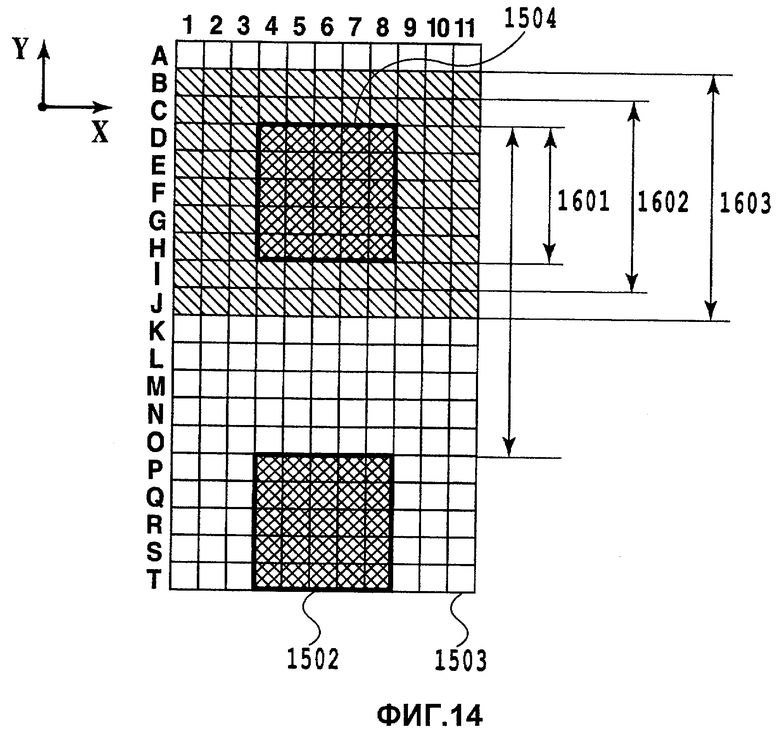
На фиг.14 представлен схематический вид для конкретной иллюстрации способа задания диапазона поиска. На фиг.14 показано, что шаблон согласования расположен в пределах первых данных 1501 изображения в областях от линии Р до линии Т. С другой стороны, область на 120 мкм вперед в направлении Y является областью, обозначенной позицией 1601, от линии D до линии Н. В частности, область 1502 в пределах первых данных изображения, в которой вырезан шаблон согласования, оценивается как движущаяся к области 1504 в пределах вторых данных изображения. В предположении, что погрешность точности транспортировки составляет примерно ±10 мкм для целевой величины пройденного расстояния транспортировки, область, в пределах которой может располагаться шаблон согласования, представляет собой область, обозначенную ссылочной позицией 1602, от линии С до линии I. В этом примере, чтобы можно было осуществить корректирующую обработку в диапазоне, по существу, включающем в себя эту область 1602, в качестве диапазона поиска задают область 1603, также имеющую границы порядка 10 мкм (один пиксель) на предшествующей стороне и на последующей стороне (область, заштрихованную диагональными линиями) по отношению к области 1602.
Причина, по которой диапазон поиска расположен относительно оцененной области 1504 не только в направлении Y, но и в направлении Х, заключается в том, что когда носитель печатаемой информации транспортируется в направлении Y, может случиться так, что этот носитель печатаемой информации не сможет точно перемещаться в направлении Y и окажется возможным его смещение также в направлении Х (явление позиционного отклонения). С учетом такого явления позиционного отклонения обеспечивается ограниченная область в качестве диапазона вычислительного поиска вокруг оцененной области 1504, так что эта ограниченная область включает в себя границы, соответствующие заданному количеству пикселей в направлении Х и направлении Y. Этот диапазон может быть определен надлежащим образом в зависимости, например, от точности транспортировки или разрешения печати печатающего устройства или размеров захватывающего изображение элемента (фотометрического преобразующего элемента), и не ограничивается вышеуказанным значением.
Как описано выше, во время обработки согласно этапу А05, область, в пределах которой осуществляется поиск подобной области во вторых данных изображения, которая подобна шаблону изображения, вырезанному из первых данных изображения, ограничивается на основании информации, собранной с помощью средства кодирования по углу вращения (средства сбора информации). В частности, в качестве диапазона поиска вторых данных изображения задается область окрестности оцененного положения, удаленного от шаблона изображения первых данных изображения на расстояние перемещения с момента времени, когда первые данные изображения оценивались на основании информации, собираемой с помощью средства сбора информации, до момента времени сбора вторых данных изображения. Диапазон поиска задают как область, получаемую путем прибавления к оцененному положению заданного количества пикселей и на предшествующей стороне, и на последующей стороне согласно направлению перемещения носителя печатаемой информации, а также прибавления заданного количества пикселей к левой и правой сторонам в направлении ширины носителя печатаемой информации, перпендикулярном направлению перемещения.
На этапе А06 диапазон поиска, заданный на этапе А05, подвергается корреляционной вычислительной обработке в порядке от концевого пикселя. При обработке на этапе А06 применительно ко вторым данным изображения осуществляется поиск подобной области, которая подобна шаблону изображения, вырезанному из первых данных изображения, в ограниченном диапазоне (1603) поиска, как описано выше.
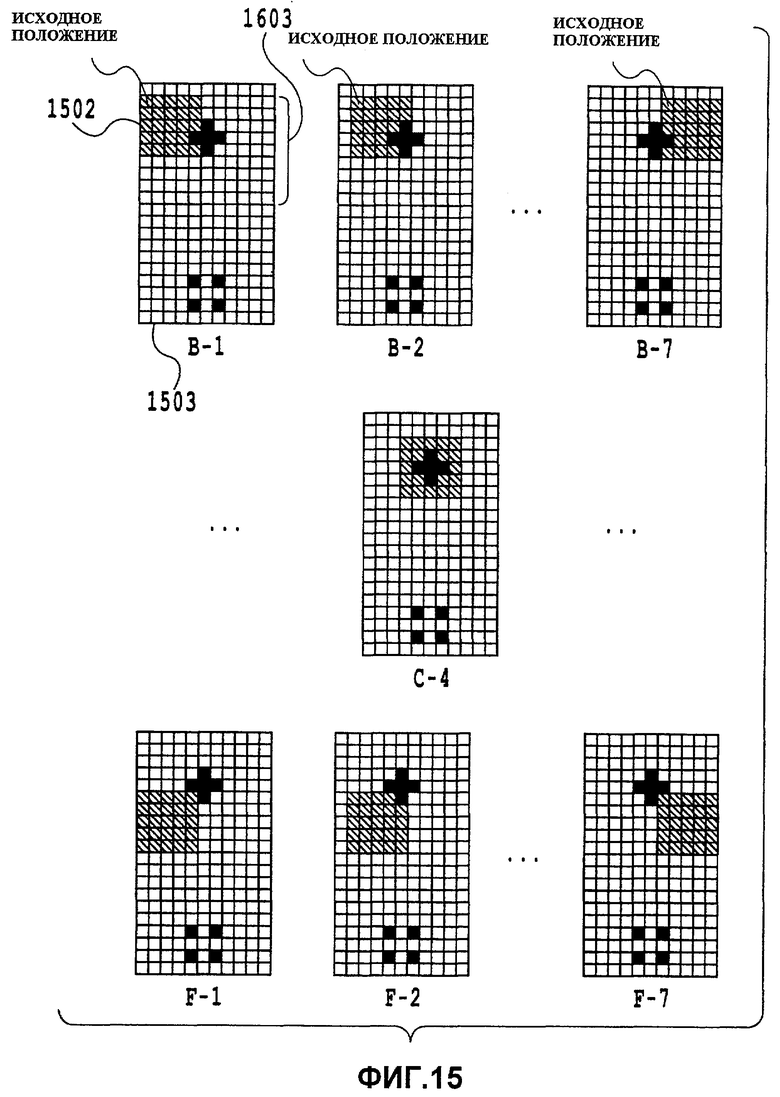
Фиг.15 иллюстрирует порядок размещения области 1601 согласования в диапазоне поиска, полученном на этапе А05, чтобы подвергнуть вторые данные 1503 изображения корреляционной обработке. Сначала область 1502 согласования размещают в положении у линии В и первого (верхнего левого) столбца и вычисляют степень подобия.
В данном случае степень подобия вычисляют, например, используя сумму абсолютных значений разностей. Сумма абсолютных значений разностей устанавливает степень S рассогласования, которую получают как сумму абсолютных значений разницы между каждым пикселем f(I, j) в шаблоне согласования и каждым пикселем g(I, j) в области согласования. Что касается суммы абсолютных значений разностей, то чем меньше степень рассогласования, тем больше степень подобия.
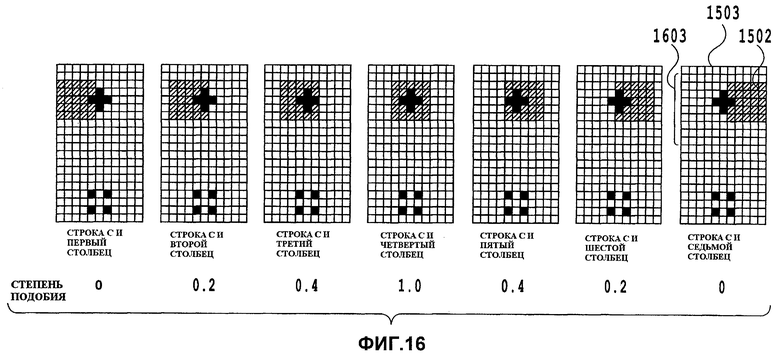
Фиг.16 иллюстрирует пример шаблона согласования и степеней рассогласования области согласования, когда поиск осуществляется в области от первого столбца до седьмого столбца в строке С. Предполагается, что изображение содержит двоичные данные изображения. Пиксель, в котором имеется шаблон (т.е. пиксель включен в крестообразную часть), обозначен 1, а пиксель, в котором нет шаблона, обозначен 0. Если предположить, что область согласования имеет исходное положение в строке С и четвертом столбце, то можно понять, что шаблон согласования, сохраненный на этапе А02, согласуется с шаблоном, помещенным в область 1502 согласования, и получается наименьшая степень рассогласования 0. Таким образом, это положение определяется как положение согласования и получается в результате корреляционной вычислительной обработки на этапе А06.
На этапе А07 на основании относительной позиционной связи между областью согласования, полученной на этапе А06, и областью согласования, сохраненной на этапе А02 (разностью в количестве пикселей), вычисляют фактическую величину расстояния перемещения на операции транспортировки согласно этапу А03. В частности, обработка согласно этапу А07 обеспечивает вычисление информации о перемещении на основании позиционной связи (или интервала) между шаблоном изображения, вырезаемым из первых данных изображения, и наиболее подобной областью во вторых данных изображения. В случае согласно этому примеру, позиционная связь соответствует 13 пикселям в направлении Y, и поэтому фактическая величина расстояния перемещения носителя печатаемой информации составляет 130 мкм. Тогда последовательность обнаружения фактической величины расстояния транспортировки на этапе 5 согласно фиг.10 заканчивается.
Как описано выше, целевая область корреляционной вычислительной обработки уменьшается, а объем вычислений значительно уменьшается путем задания диапазона поиска, который ограничен на основании величины пройденного расстояния транспортировки, полученного из средства сбора информации (средства кодирования по углу вращения), предназначенного для сбора информации, касающейся величины возбуждения механизма. В случае, когда используется обычный метод, при осуществлении которого диапазон для корреляционной обработки перекрывает все области вторых данных 1503 изображения, коррекционное вычисление следует проводить 16×7=112 раз, как показано на фиг.21. В отличие от этого, в данном примере область, в пределах которой проводится поиск, ограничена, вследствие чего количество вычислений уменьшается до 35, тем самым уменьшая объем вычислений примерно до 1/3 объема вычислений согласно обычному случаю. Таким образом, информацию о перемещении можно обнаружить быстрее, а также можно провести высокоскоростную транспортировку быстрее, чем в обычном случае (т.е. осуществить операцию печати с большей скоростью). Иными словами, информацию о перемещении можно обнаружить даже тогда, когда ЦП контроллера обладает меньшими вычислительными возможностями, чем в обычном случае, что приводит к уменьшению затрат на реализацию контроллера.
В этом примере средство сбора информации получает информацию, касающуюся величины возбуждения транспортирующего механизма, из значения выходного сигнала средства кодирования по углу вращения. Эта информация функционирует как ключ для оценки того, где во вторых данных изображения находится шаблон согласования, вырезанный из первых данных изображения. Однако изобретение этим не ограничивается, и можно также использовать другую конфигурацию. Например, если электродвигатель 14 транспортировки представляет собой шаговый электродвигатель, то величину возбуждения можно оценить на основании количества импульсов возбуждения. На основании количества импульсов возбуждения оценивают расстояние перемещения между моментом времени получения первых данных изображения и моментом времени получения вторых данных изображения. На основании этого оцененного расстояния перемещения задают область поиска. В частности, средство сбора информации принимает значение, полученное на основании количества импульсов возбуждения шагового электродвигателя механизма привода, в качестве информации, касающейся величины возбуждения.
Можно также использовать другой способ для сбора информации, касающейся величины возбуждения транспортирующего механизма, путем сбора этой информации на основании целевого управляющего значения при управлении транспортировкой на одном этапе во время управления транспортировкой в контроллере. На основании этого целевого управляющего значения оценивают расстояние перемещения между моментом времени получения первых данных изображения и моментом времени получения вторых данных изображения. На основании этого оцененного расстояния перемещения задают область поиска и момент времени получения вторых данных изображения. В частности, средство сбора информации принимает значение, полученное на основании целевого управляющего значения в управляющем блоке для управления возбуждением механизма привода, в качестве информации, касающейся величины возбуждения.
Корреляционная обработка для осуществления сравнения особых точек на изображении, захватываемом блоком датчика прямого действия, не ограничивается конфигурацией, предусматривающей использование структурированного изображения, описанного выше. Например, можно также использовать другую конфигурацию, в которой информацию, касающуюся отраженного света, получаемую из блока датчика прямого действия, подвергают преобразованию Фурье, а информацию, получаемую в другие моменты времени, контролируют на согласование в связи с каждой частотой. В альтернативном варианте можно также получать расстояние перемещения между частями пиков. В альтернативном варианте можно также сравнивать, например, шаблоны в виде крапинок, обуславливаемые интерференцией с отраженным светом из когерентного источника света. В любом из этих способов должно использоваться средство корреляционной обработки, которое может осуществлять сравнение между характерными точками данных изображения двух типов.
Пример 2
В примере 1 предлагался случай, когда целевая величина пройденного расстояния транспортировки (за одну операцию шаговой транспортировки) меньше, чем область обнаружения захватывающего элемента блока 16 датчика прямого действия, а один характеристический шаблон включен в оба из двух кусков данных изображения, собранных в разные моменты времени. В отличие от этого, в примере 2 представлен способ управления для случая, когда величина одного пройденного шага транспортировки больше, чем протяженность скомпонованных пикселей, полученная с помощью блока 16 датчика прямого действия. Базовая идея этого способа заключается в том, что сбор множества кусков данных происходит за одно шаговое перемещение, за счет чего и осуществляется управление транспортировкой.
Конструкция устройства в примере 2 является такой же, как в примере 1. Вся последовательность является такой же, как описанная в блок-схеме последовательности операций согласно фиг.10, за исключением того, что способ реализации последовательности обнаружения фактической величины расстояния транспортировки на этапе 5 отличается от того, о котором шла речь в примере 1. На фиг.17 представлена блок-схема последовательности операций, иллюстрирующая последовательность обнаружения фактического расстояния транспортировки в этом примере. На фиг.18 представлен схематический вид, иллюстрирующий способ вычисления расстояния и/или скорости перемещения для носителя 8 печатаемой информации на основании данных изображения, получаемых из блока 16 датчика прямого действия.
Когда начинается последовательность обнаружения фактического расстояния транспортировки, ЦП 101 на этапе В01 использует блок 16 датчика прямого действия для сбора данных изображения носителя 8 печатаемой информации в качестве первых данных (2101) изображения. Когда блок 16 датчика прямого действия в конфигурации согласно фиг.3 используется для захвата поверхности ленты 19, первые данные изображения и последующие вторые данные изображения представляют собой изображения поверхности ленты.
На этапе В02 ЦП 101 вызывает позиционирование области согласования, имеющей область 5 пикселей × 5 пикселей, в подходящем положении на стороне, следующей после первых данных 2101 изображения. На фиг.18 показан пример, в котором область согласования размещена таким образом, что имеет характеристический шаблон (крестообразный шаблон в этом случае), который присутствует на поверхности носителя 8 печатаемой информации. После этого ЦП 101 извлекает данные изображения, заключенные в области согласования, и сохраняет эти данные в качестве шаблона согласования (шаблона изображения в части первых данных изображения).
На этапе В03 начинается основанная на информации из датчика 18 угла вращения (т.е. с учетом величины фактически измеренного пройденного расстояния транспортировки, получаемой из датчика 18 угла вращения) транспортировка носителя 8 печатаемой информации в направлении Y.
Когда заданное время или заданная подсчитываемая величина меньше, чем прошедшее за одно шаговое перемещение, блок 16 датчика прямого действия используется на этапе В04 во время проводимой операции транспортировки для сбора данных изображения носителя 8 печатаемой информации (или ленты 19) в качестве вторых данных (2103) изображения.
На этапе В05, на основании значения величины пройденного расстояния транспортировки, подсчитанного при сборе вторых данных 2103 изображения, задают ограниченный диапазон поиска во вторых данных изображения. Способ задания диапазона поиска является таким же, как в примере 1, и поэтому дополнительно описан не будет.
На этапе В06, диапазон поиска, заданный на этапе В05, подвергают корреляционной вычислительной обработке в порядке от концевого пикселя. Конкретный вычислительный алгоритм, используемый в этом примере, является таким же, как алгоритм в примере 1, описанный в отношении фиг.15 и фиг.16, и поэтому дополнительно описан не будет. За счет корреляционной вычислительной обработки на этапе В06 положение области согласования, в которой степень подобия является наивысшей, получается как результат корреляционной вычислительной обработки.
На этапе В07, на основании результата обработки согласно этапу В06, вычисляют и сохраняют фактически измеренное расстояние перемещения носителя печатаемой информации, транспортируемого в период от этапа В03 до этапа В07. В этом примере этапы от этапа В03 до этапа В07 повторяются до тех пор, пока суммарная величина расстояния транспортировки носителя печатаемой информации не достигнет целевой величины расстояния транспортировки, соответствующей одному шаговому перемещению. На этапе В07 запоминаются информации фактически измеренной величины расстояния перемещения в каждой отличающейся области.
На этапе В08 определяют, достигло ли посчитываемое значение величины расстояния транспортировки, определяемое датчиком 18 угла вращения начиная с этапа В03, целевой величины, или нет. Когда определяется, что посчитываемое значение не достигло целевой величины, обработка переходит к этапу В10. На этапе В10 вторые данные 2103 изображения, собранные на этапе В04, полагаются первыми данным изображения. Затем, в связи с этими данными изображения, область 2102 согласования размещается в подходящем положении с предшествующей стороны, как на этапе В02.
На фиг.19 показан пример, в котором область 2102 согласования размещена таким образом, что имеет характеристический шаблон (четырехточечный шаблон в этом случае), который присутствует на носителе 8 печатаемой информации. Затем данные изображения, включенные в область согласования, извлекаются, и эти данные сохраняются в качестве шаблона согласования.
После этого обработка возвращается к этапу В03 для осуществления обработки, как описано выше, на основании вновь сохраненного шаблона согласования. До тех пор, пока на этапе В08 не подтвердится, что величина расстояния транспортировки не достигнет целевой величины расстояния транспортировки, соответствующего одному шаговому перемещению, носитель печатаемой информации транспортируется, а этапы с этапа В03 до этапа В08 повторяются. Когда на этапе В08 подтверждается, что величина расстояния транспортировки достигла целевой величины, обработка переходит к этапу В09.
На этапе В09 вычисляют сумму множества фактически измеренных расстояний перемещения, сохранявшихся всякий раз при выполнении этапа В07, и эту сумму задают в качестве суммарной фактической величины расстояния перемещения. Затем обработка переходит к этапу 6 в блок-схеме последовательности операций, показанной на фиг.10. Обработки после этапа 6 являются такими же, как в примере 1, и поэтому дополнительно описаны не будут.
В соответствии с этим примером, даже когда величина расстояния, пройденного за одну операцию транспортировки (целевая величина пройденного расстояния транспортировки) носителя печатаемой информации, оказывается большей, чем область обнаружения блока 16 датчика прямого действия, множество частей расстояния перемещения обнаруживаются во время одной операции транспортировки, вследствие чего происходит обнаружение расстояния перемещения, и за счет этого достигается управление транспортировкой. В результате, даже когда блок 16 датчика прямого действия имеет малый захватывающий элемент, можно осуществить точный сбор информации о перемещении. Этот пример применим к принтеру, который осуществляет операцию печати при непрерывной транспортировке носителя печатаемой информации в направлении Y.
Пример 3
В примере 1 и примере 2 предполагался случай, когда целевая величина пройденного расстояния транспортировки (за одну операцию шаговой транспортировки) меньше, чем область обнаружения захватывающего элемента блока 16 датчика прямого действия. С другой стороны, в примере 3 представлен способ управления для случая, когда даже в середине одного задания печати заданный диапазон поиска находится в пределах диапазона вторых данных изображения или не в пределах этого диапазона.
Устройство в этом примере имеет такую же конструкцию, как в примере 1. Вся последовательность является такой же, как описанная в блок-схеме последовательности операций согласно фиг.10, за исключением того, что способ реализации последовательности обнаружения фактической величины расстояния транспортировки на этапе 5 отличается от того, о котором шла речь в примере 1. На фиг.20 представлена блок-схема последовательности операций, иллюстрирующая последовательность обнаружения фактического расстояния транспортировки в этом примере.
Когда начинается последовательность обнаружения фактического расстояния транспортировки, ЦП 101 на этапе D01 сначала использует блок 16 датчика прямого действия для сбора данных изображения носителя 8 печатаемой информации в качестве первых данных изображения. Когда блок 16 датчика прямого действия в конфигурации согласно фиг.3 используется для захвата поверхности ленты 19, первые данные изображения и последующие вторые данные изображения представляют собой изображения поверхности ленты.
Далее, ЦП 101 на этапе D02 размещает область согласования, имеющую область 5 пикселей × 5 пикселей, в подходящем положении на стороне, предшествующей первым данным изображения. После этого ЦП 101 извлекает данные изображения, заключенные в области согласования, и сохраняет эти данные в качестве шаблона согласования (шаблона изображения части первых данных изображения). Дальнейшая обработка является такой же, как в примерах 1 и 2.
Далее, на этапе D03, ЦП 101 определяет, будут данные изображения, заключенные в области согласования, сохраненной на этапе D02, вне пределов области обнаружения блока 16 датчика прямого действия из-за следующей операции транспортировки на расстояние, имеющее целевую величину или нет. Когда определяется, что данные изображения не будут выходить за пределы области обнаружения, обработка переходит к этапу D04 для реализации последовательности А. Последовательность А является такой же, как этапы с этапа А03 до этапа А07 в блок-схеме последовательности операций согласно фиг.12, описанной в примере 1.
С другой стороны, когда определяется, что данные изображения будут выходить за пределы области обнаружения из-за следующей операции транспортировки, обработка переходит к этапу D05 для реализации последовательности В. Последовательность В является такой же, как этапы с этапа В03 до этапа В09 в блок-схеме последовательности операций согласно фиг.17, описанной в примере 2. После получения результатов сбора информации о соответствующих фактических величинах пройденного расстояния транспортировки, обработка возвращается к этапу 6 согласно фиг.10.
В соответствии с этим примером, даже когда заданный диапазон поиска находится в пределах диапазона вторых данных изображения или выходит за его пределы, оказывается возможным точный сбор информации о движении.
Хотя данное изобретение описано со ссылками на возможные варианты осуществления, должно быть ясно, что изобретение не ограничивается описанными возможными вариантами осуществления. Объем притязаний нижеследующей формулы изобретения следует считать соответствующим интерпретации в самом широком смысле и охватывающим все такие модификации, эквивалентные конструкции и функции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2015 |
|
RU2655243C1 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2015 |
|
RU2614606C2 |
| КАРТРИДЖ И ПЕЧАТАЮЩЕЕ УСТРОЙСТВО | 2008 |
|
RU2416524C2 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ОБЪЕКТОВ | 2009 |
|
RU2413621C1 |
| ПЕЧАТУЮЩЕЕ УСТРОЙСТВО, СПОСОБ УПРАВЛЕНИЯ И ЗАПОМИНАЮЩИЙ НОСИТЕЛЬ | 2014 |
|
RU2598289C2 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО, СПОСОБ УПРАВЛЕНИЯ ДЛЯ НЕГО И НОСИТЕЛЬ ДАННЫХ | 2015 |
|
RU2611291C2 |
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЯ, УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЯ И НОСИТЕЛЬ ХРАНЕНИЯ ИНФОРМАЦИИ | 2021 |
|
RU2764286C1 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО | 2003 |
|
RU2256560C2 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО, СПОСОБ УПРАВЛЕНИЯ ДЛЯ НЕГО И НОСИТЕЛЬ ДАННЫХ | 2015 |
|
RU2616547C2 |
| ОПТИЧЕСКИЙ СЧИТЫВАТЕЛЬ, СПОСОБ УПРАВЛЕНИЯ ОПТИЧЕСКОГО СЧИТЫВАТЕЛЯ И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ ЗАПИСИ | 2011 |
|
RU2454020C1 |

Изобретение относится к транспортировке листов в печатающем устройстве. Устройство содержит механизм, вызывающий движение объекта, блок сбора информации, касающейся величины возбуждения механизма, датчик для захвата поверхности объекта с целью сбора данных изображения, обрабатывающий модуль для обработки первых данных изображения и вторых данных изображения, собираемых датчиком в разные моменты времени, и управляющий блок для управления механизмом на основании информации о перемещении, полученной с помощью обрабатывающего модуля. При этом обрабатывающий модуль осуществляет вырезание шаблона изображения области части первых данных изображения, ограничение диапазона поиска во вторых данных изображения, в пределах которых поиск подобной области осуществляется на основании информации, собранной блоком сбора информации, поиск подобной области в пределах ограниченного диапазона поиска во вторых данных изображения и получение информации о перемещении объекта на основании позиционной связи между шаблоном изображения в первых данных изображения и подобной областью во вторых данных изображения. Изобретение позволяет осуществлять движение листа с более высокой скоростью, а также получать информацию о его перемещении за короткое время. 14 з.п. ф-лы, 22 ил.
1. Устройство, содержащее
механизм, вызывающий движение объекта,
блок сбора информации, который собирает информацию, касающуюся величины возбуждения упомянутого механизма,
датчик для захвата поверхности объекта с целью сбора данных изображения,
обрабатывающий модуль для обработки первых данных изображения и вторых данных изображения, собираемых с использованием упомянутого датчика в разные моменты времени, и получения таким образом информации о перемещении объекта, и
управляющий блок для управления упомянутым механизмом на основании информации о перемещении, полученной с помощью упомянутого обрабатывающего модуля,
при этом обрабатывающий модуль осуществляет обработки:
(а) вырезания шаблона изображения области части первых данных изображения;
(б) ограничения диапазона поиска во вторых данных изображения, в пределах которых поиск подобной области, которая подобна шаблону изображения, осуществляется на основании информации, собранной упомянутым блоком сбора информации;
(в) поиска упомянутой подобной области в пределах ограниченного диапазона поиска во вторых данных изображения; и
(г) получения информации о перемещении объекта на основании позиционной связи между шаблоном изображения в первых данных изображения и упомянутой подобной областью во вторых данных изображения.
2. Устройство по п.1, в котором
упомянутый обрабатывающий модуль в качестве ограниченного диапазона поиска во второй области изображения задает диапазон вокруг оцененного положения, отстоящего от положения шаблона изображения первых данных изображения, по расстоянию перемещения, которое оценивается на основании информации, собранной упомянутым блоком сбора информации, и которое вызывается в течение периода от момента времени сбора первых данных изображения до момента времени сбора вторых данных изображения.
3. Устройство по п.2, в котором
упомянутый обрабатывающий модуль в качестве ограниченного диапазона поиска задает область, получаемую путем прибавления заданного количества пикселей к предшествующей стороне и последующей стороне в направлении перемещения объекта относительно оцененного положения.
4. Устройство по п.3, в котором
упомянутый обрабатывающий модуль в качестве ограниченного диапазона поиска задает область, получаемую путем дополнительного прибавления заданного количества пикселей к обеим сторонам согласно направлению, перпендикулярному направлению перемещения объекта относительно оцененного положения.
5. Устройство по п.1, в котором
упомянутый блок сбора данных имеет средство кодирования для обнаружения величины возбуждения упомянутого механизма, а информация, касающаяся величины возбуждения, представляет собой значение, полученное на основании выходных сигналов из упомянутого средства кодирования в течение периода от момента времени захвата первого изображения до момента времени захвата второго изображения.
6. Устройство по п.1, в котором
упомянутый блок сбора данных принимает значение, полученное на основании целевого управляющего значения в упомянутом управляющем блоке, в качестве информации, касающейся величины возбуждения.
7. Устройство по п.1, в котором
упомянутый механизм имеет шаговый электродвигатель, а упомянутый блок сбора данных принимает значение, полученное на основании количества импульсов возбуждения шагового электродвигателя, в качестве информации, касающейся величины возбуждения.
8. Устройство по п.1, в котором
упомянутый управляющий блок управляет возбуждением упомянутого механизма на основании профиля возбуждения, а
упомянутый блок сбора данных принимает значение, полученное на основании профиля возбуждения, в качестве информации, касающейся величины возбуждения.
9. Устройство по п.1, в котором
упомянутый механизм имеет валик, к которому прикладывается движущая сила, а упомянутый блок сбора данных принимает информацию, касающуюся величины угла вращения валика.
10. Устройство по п.9, в котором
упомянутый механизм имеет валики, предусмотренные во множестве положений, и ленту, протянутую среди множества валиков, и вращение валиков вызывает вращение ленты, тем самым вызывая движение объекта, расположенного на ленте, а упомянутый блок сбора данных принимает информацию, касающуюся величины угла вращения валика среди множества валиков.
11. Устройство по п.1, в котором
датчик представляет собой датчик области, выполненный так, что множество фотоэлектрических преобразующих элементов расположено двухмерным образом.
12. Устройство по п.1, дополнительно содержащее печатающий блок, имеющий печатающую головку для осуществления печати на объекте, служащем в качестве носителя печатаемой информации.
13. Устройство по п.1, дополнительно содержащее печатающий блок, имеющий печатающую головку для осуществления печати на носителе печатаемой информации, и при этом объект представляет собой ленту, служащую в качестве части механизма, который транспортирует носитель печатаемой информации, поддерживая на себе этот носитель печатаемой информации.
14. Устройство по п.12, в котором в течение периода между сбором первых данных изображения и сбором вторых данных изображения носитель печатаемой информации подвергается шаговой транспортировке на расстояние, имеющее целевую величину, а шаговая транспортировка и печать посредством печатающей головки попеременно повторяются для осуществления операции печати.
15. Устройство по п.12, в котором носитель печатаемой информации транспортируется непрерывно, а транспортировка и печать посредством печатающей головки осуществляются одновременно.
| US 7104710 В2, 12.09.2006 | |||
| US 6599042 В2, 29.07.2003 | |||
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО | 2003 |
|
RU2256560C2 |

