УРОВЕНЬ ТЕХНИКИ
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к печатающему устройству, для того чтобы печатать на листе с помощью печатающей головки, и более конкретно к печатающему устройству, для того чтобы транспортировать листы к зоне печати, обращенной к печатающей головке, тогда как часть последующего листа перекрывает часть предыдущего листа.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
В выложенном патенте Японии №2000-15881 описано печатающее устройство для управления с возможностью обеспечения того, что краевое поле переднего края последующего листа перекрывает краевое поле заднего края предыдущего листа, которое содержит подающее средство для разделения и подачи множества листов один за другим, печатающее средство для формирования изображения на листе, транспортирующее средство для транспортировки листа к печатающему средству, обнаруживающее средство для обнаружения листа и средство управления, чтобы управлять приведением в действие подающего средства в соответствии с сигналом обнаруживающего средства.
Однако устройство, описанное в выложенном патенте Японии №2000-15881, может начинать подачу последующего листа только тогда, когда предельная величина для заднего края предыдущего листа и предельная величина для переднего края последующего листа подтверждаются до начала подачи последующего листа. Это вносит техническую сложность, что требуется время, чтобы начинать подачу последующего листа.
КРАТКОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение было выполнено вследствие вышеописанной проблемы и обеспечивает печатающее устройство, которое может выполнять операцию отслеживания для обеспечения перекрытия последующим листом предыдущего листа.
Согласно первому аспекту настоящего изобретения обеспечивается печатающее устройство, содержащее: первый подающий валик, выполненный с возможностью подачи листа для печати, уложенного в стопу на листоприемном устройстве; двигатель подачи, выполненный с возможностью приводить в движение первый подающий валик; второй подающий валик, приводимый в движение двигателем подачи и выполненный с возможностью транспортировки листа для печати, подаваемого первым подающим валиком; транспортирующий валик, выполненный с возможностью транспортировки листа для печати, транспортируемого вторым подающим валиком; двигатель транспортировки, выполненный с возможностью приводить в движение транспортирующий валик; печатающий блок, выполненный с возможностью печати на листе для печати, транспортируемом транспортирующим валиком; блок обнаружения, расположенный между вторым подающим валиком и транспортирующим валиком, выполненный с возможностью обнаружения переднего края листа для печати; и блок управления, выполненный с возможностью, когда печатающий блок выполняет операцию печати на предыдущем листе в качестве листа для печати, предыдущим по очереди поданного из листоприемного устройства, приводить в действие двигатель подачи в синхронизации с двигателем транспортировки до обнаружения блоком обнаружения переднего края последующего листа в качестве листа для печати, последующим по очереди поданного из листоприемного устройства, и непрерывно возбуждать двигатель подачи так, что скорость транспортировки последующего листа посредством двигателя подачи становится более высокой, чем скорость транспортировки предыдущего листа посредством двигателя транспортировки, после того, как блок обнаружения обнаруживает передний край последующего листа.
Согласно второму аспекту настоящего изобретения, обеспечивается печатающее устройство, содержащее: первый подающий валик, выполненный с возможностью подачи листа для печати, уложенного в стопу на листоприемном устройстве; двигатель подачи, выполненный с возможностью приводить в движение первый подающий валик; второй подающий валик, приводимый в движение двигателем подачи и выполненный с возможностью транспортировки листа для печати, подаваемого первым подающим валиком; транспортирующий валик, выполненный с возможностью транспортировки листа для печати, транспортируемого вторым подающим валиком; двигатель транспортировки, выполненный с возможностью приводить в движение транспортирующий валик; печатающий блок, выполненный с возможностью печати на листе для печати, транспортируемом транспортирующим валиком; каретку, включающую в состав печатающий блок, для перемещения в направлении, пересекающем направление, в котором лист для печати транспортируется; блок управления печатью, выполненный с возможностью печатать изображение на листе для печати путем повторения операции периодической транспортировки листа для печати транспортирующим валиком и операции перемещения каретки в пересекающем направлении; блок обнаружения, расположенный между вторым подающим валиком и транспортирующим валиком, выполненный с возможностью обнаружения переднего края листа для печати; и блок управления, выполненный с возможностью, когда печатающий блок выполняет операцию печати на предыдущем листе в качестве листа для печати, предыдущим по очереди поданного из листоприемного устройства, периодически приводить в действие двигатель подачи в синхронизации с двигателем транспортировки до обнаружения блоком обнаружения переднего края последующего листа в качестве листа для печати, последующим по очереди поданного из листоприемного устройства, и непрерывно приводить в действие двигатель подачи после обнаружения блоком обнаружения переднего края последующего листа.
Согласно третьему аспекту настоящего изобретения, обеспечивается способ управления печатающим устройством, включающим в себя первый подающий валик, выполненный с возможностью подачи листа для печати, уложенного в стопу на листоприемном устройстве, двигатель подачи, выполненный с возможностью приводить в движение первый подающий валик; второй подающий валик, приводимый в движение двигателем подачи и выполненный с возможностью транспортировки листа для печати, подаваемого первым подающим валиком, транспортирующий валик, выполненный с возможностью транспортировки листа для печати, транспортируемого вторым подающим валиком, двигатель транспортировки, выполненный с возможностью приводить в движение транспортирующий валик, печатающий блок, выполненный с возможностью печати на листе для печати, транспортируемом транспортирующим валиком, и блок обнаружения, расположенный между вторым подающим валиком и транспортирующим валиком, выполненный с возможностью обнаружения переднего края листа для печати, способ содержит: этап управления, когда печатающий блок выполняет операцию печати на предыдущем листе в качестве листа для печати, предыдущим по очереди поданного из листоприемного устройства, по приведению в действие двигателя подачи в синхронизации с двигателем транспортировки до обнаружения блоком обнаружения переднего края последующего листа в качестве листа для печати, последующим по очереди поданного из листоприемного устройства, и по непрерывному приведению в действие двигателя подачи так, что скорость транспортировки последующего листа посредством двигателя подачи становится выше, чем скорость транспортировки предыдущего листа посредством двигателя транспортировки после обнаружения блоком обнаружения переднего края последующего листа.
Согласно четвертому аспекту настоящего изобретения обеспечивается способ управления печатающим устройством, включающим в себя первый подающий валик, выполненный с возможностью подачи листа для печати, уложенного в стопу на листоприемном устройстве, двигатель подачи, выполненный с возможностью приводить в движение первый подающий валик, второй подающий валик, приводимый в движение двигателем подачи и выполненный с возможностью транспортировки листа для печати, подаваемого первым подающим валиком, транспортирующий валик, выполненный с возможностью транспортировки листа для печати, транспортируемого вторым подающим валиком, двигатель транспортировки, выполненный с возможностью приводить в движение транспортирующий валик, печатающий блок, выполненный с возможностью печати на листе для печати, транспортируемом транспортирующим валиком, каретку, включающую в состав печатающий блок, для перемещения в направлении, пересекающем направление, в котором лист для печати транспортируется, блок управления печатью, выполненный с возможностью печати изображения на листе для печати путем повторения операции периодической транспортировки листа для печати транспортирующим валиком и операции перемещения каретки в пересекающем направлении, и блок обнаружения, расположенный между вторым подающим валиком и транспортирующим валиком, выполненный с возможностью обнаружения переднего края листа для печати, способ содержит: этап управления, когда печатающий блок выполняет операцию печати на предыдущем листе в качестве листа для печати, предыдущим по очереди поданного из листоприемного устройства, по периодическому приведению в действие двигателя подачи в синхронизации с двигателем транспортировки до обнаружения блоком обнаружения переднего края последующего листа в качестве листа для печати, последующим по очереди поданного из листоприемного устройства, и по непрерывному приведению в действие двигателя подачи после обнаружения блоком обнаружения переднего края последующего листа.
Дополнительные функции настоящего изобретения станут очевидными из последующего описания примеров осуществления со ссылкой на сопроводительные чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - вид для пояснения операции непрерывной подачи с перекрытием в печатающем устройстве согласно первому варианту осуществления настоящего изобретения;
Фиг. 2 - вид для пояснения операции непрерывной подачи с перекрытием в печатающем устройстве согласно первому варианту осуществления настоящего изобретения;
Фиг. 3 - вид для пояснения операции непрерывной подачи с перекрытием в печатающем устройстве согласно первому варианту осуществления настоящего изобретения;
Фиг. 4A и 4B - виды для пояснения компоновки захватного валика;
Фиг. 5 - блок-схема, показывающая печатающее устройство согласно первому варианту осуществления;
Фиг. 6A и 6B блок-схемы, иллюстрирующие операции непрерывной подачи с перекрытием согласно первому варианту осуществления;
Фиг. 7 - вид для пояснения операции обеспечения перекрытия последующим листом предыдущего листа;
Фиг. 8 - вид для пояснения операции обеспечения перекрытия последующим листом предыдущего листа;
Фиг. 9 - блок-схема для пояснения операции коррекции перекоса последующего листа согласно первому варианту осуществления;
Фиг. 10 - блок-схема для пояснения операции вычисления позиции переднего края последующего листа; и
Фиг. 11A-11C - виды для пояснения операции непрерывной подачи с перекрытием согласно второму варианту осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящего изобретения будут описываться подробно ниже со ссылкой на сопроводительные чертежи.
(ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ)
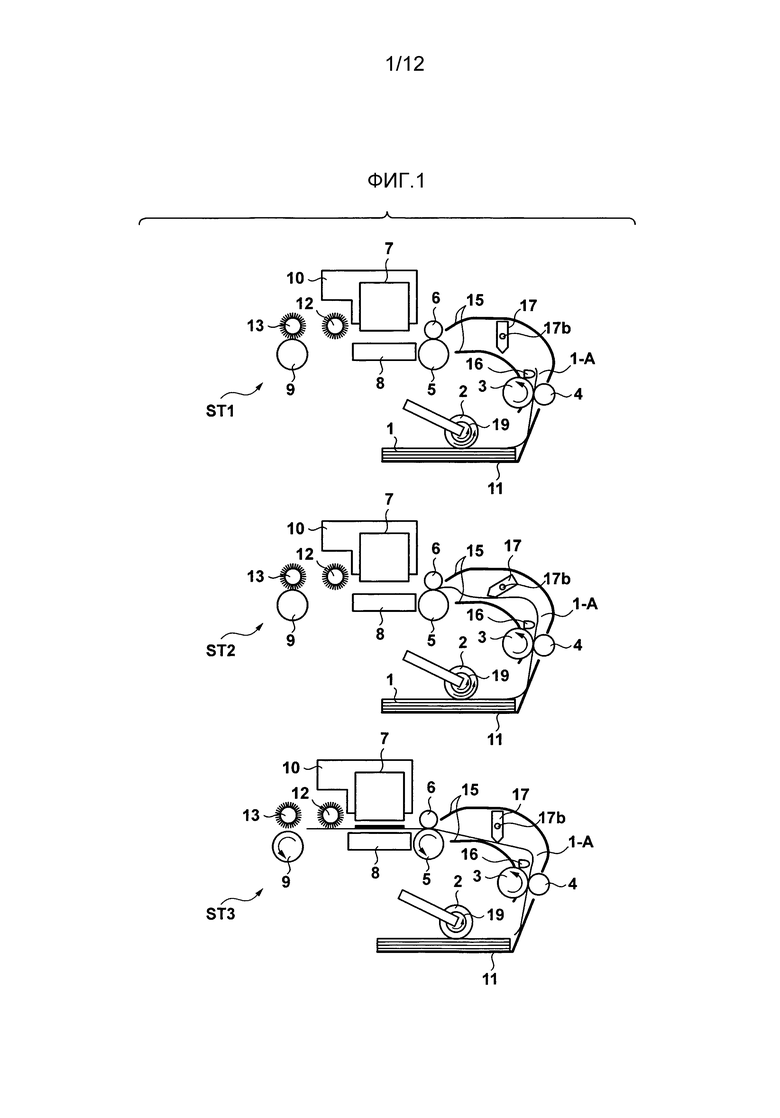
Фиг. 1-3 являются видами в разрезе для пояснения операции непрерывной подачи с перекрытием в печатающем устройстве согласно первому варианту осуществления настоящего изобретения. Схематичная компоновка печатающего устройства согласно варианту осуществления сначала будет описываться со ссылкой на ST1 по Фиг. 1.
В ST1 по Фиг. 1 числовая ссылочная позиция 1 обозначает листы для печати. Множество листов 1 для печати уложены в стопу на подающем лотке 11 (листоприемное устройство). Захватный валик 2 упирается в верхний лист 1 для печати, уложенный в стопу на подающем лотке 11, чтобы захватить его. Подающий валик 3 подает лист 1 для печати, захваченный захватным валиком 2, к стороне выхода по направлению транспортировки листа. Ведомый валик 4 подачи поджимается к подающему валику 3, чтобы вмещать между ними лист 1 для печати с помощью подающего валика 3, посредством этого осуществляя подачу листа 1 для печати.
Транспортирующий валик 5 транспортирует лист 1 для печати, подаваемый подающим валиком 3 и ведомым валиком 4 подачи, к позиции, обращенной к печатающей головке 7. Прижимной ролик 6 поджимается к транспортирующему валику 5, чтобы вмещать между ними лист для печати с помощью транспортирующего валика 5, посредством этого транспортируя лист для печати.
Печатающая головка 7 печатает лист 1 для печати, транспортируемый транспортирующим валиком 5 и прижимным роликом 6. В этом варианте осуществления будет иллюстрироваться струйная печатающая головка, которая печатает лист 1 для печати путем выпуска краски из печатающей головки. Бумагоопорный валик 8 поддерживает обратную поверхность листа 1 для печати в обращенном к печатающей головке 7 положении. Каретка 10 удерживает (вмещает) печатающую головку 7 и перемещается в направлении, пересекающем направление транспортировки листа.
Выводной валик 9 выгружает лист для печати, напечатанный печатающей головкой 7, вовне устройства. (Цилиндрические) Зубчатые колеса 12 и 13 вращаются, пока они находятся в контакте с поверхностью для печати листа для печати, печатаемого печатающей головкой 7. Зубчатое колесо 13 на стороне выхода поджимается к выводному валику 9, и отсутствует выводной валик 9, расположенный в позиции, обращенной к зубчатому колесу 12 на стороне входа. Зубчатое колесо 12 используется, чтобы препятствовать подвижности («плаванию») листа 1 для печати, и также именуется нажимным зубчатым колесом.
Направляющая 15 транспортировки направляет лист 1 для печати между участком подающего зазора-захвата, образуемого подающим валиком 3 и ведомым валиком 4 подачи, и участком транспортирующего зазора-захвата, образуемого транспортирующим валиком 5 и прижимным роликом 6. Датчик 16 обнаружения листа обнаруживает передний край и задний край листа 1 для печати. Датчик 16 обнаружения листа обеспечивается по ходу ниже подающего валика 3 в направлении транспортировки листа. Рычаг 17 прижима листа вынуждает передний край последующего листа перекрывать задний край предыдущего листа. Рычаг 17 прижима листа поджимается пружиной вокруг вращающегося вала 17b в направлении против часовой стрелки на Фиг. 1.
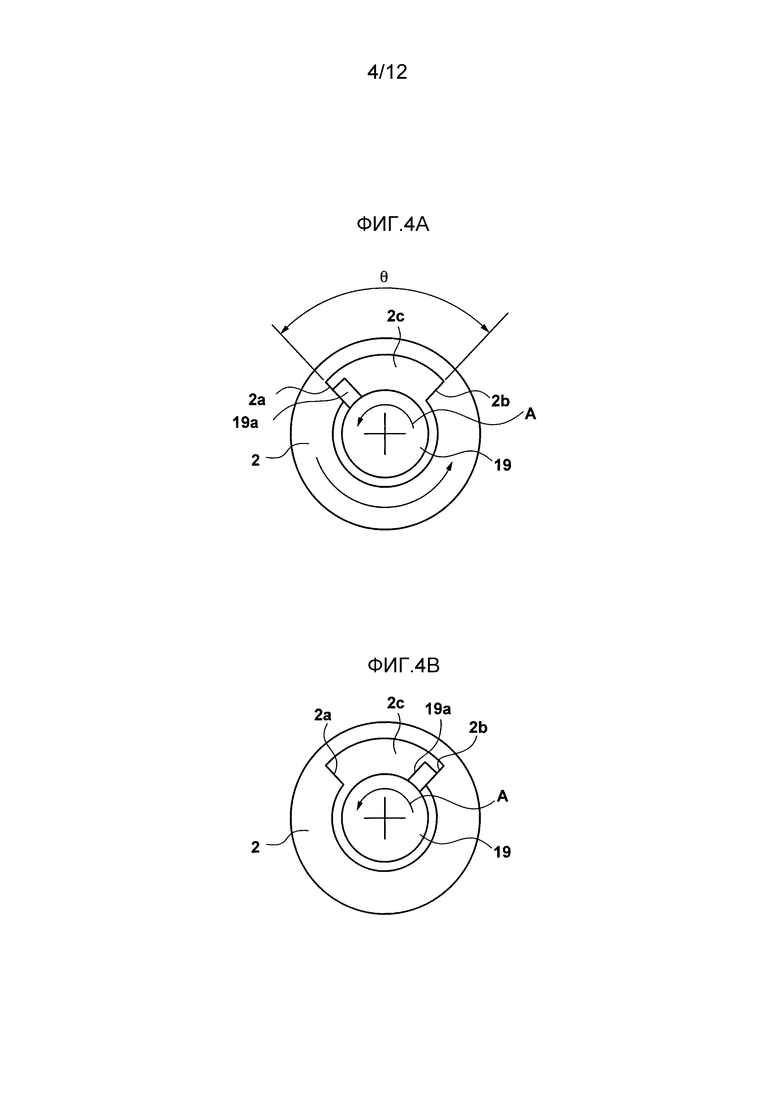
Фиг. 4A и 4B являются видами для пояснения компоновки захватного валика 2. Как описано выше, захватный валик 2 упирается в уложенный в стопу на подающем лотке 11 верхний лист для печати, чтобы захватить его. Приводной вал 19 передает движение двигателя подачи (будет описано далее) на захватный валик 2. При захвате листа для печати приводной вал 19 и захватный валик 2 вращаются в направлении, обозначенном стрелкой A на фигурах Фиг. 4A и 4B. Выступ 19a сформирован в приводном вале 19. Вогнутая часть 2c, в которую входит выступ 19a, сформирована в захватном валике 2. Как показано на Фиг. 4A, когда выступ 19a упирается в первую поверхность 2a вогнутой части 2c захватного валика 2, движение приводного вала 19 передается на захватный валик 2. В этом случае, когда приводной вал 19 приводится в движение, захватный валик 2 также вращается. С другой стороны, как показано на Фиг. 4B, когда выступ 19a упирается во вторую поверхность 2b вогнутой части 2c захватного валика 2, движение приводного вала 19 не передается на захватный валик 2. В этом случае, даже если приводной вал 19 приводится в движение, захватный валик 2 не вращается. Кроме того, когда выступ 19a сформирован между первой поверхностью 2a и второй поверхностью 2b, без прилегания вплотную к первой поверхности 2a или второй поверхности 2b, даже если приводной вал 19 приводится в движение, захватный валик 2 не вращается.
На Фиг. 5 показана блок-схема печатающего устройства согласно этому варианту осуществления. Микропроцессорный блок (MPU) 201 управляет работой каждого блока, обработкой данных и подобным. Как будет описано далее, MPU 201 также функционирует в качестве средства управления транспортировкой, способного управлять транспортировкой листов для печати таким образом, что задний край предыдущего листа и передний край последующего листа перекрывают друг друга. Постоянное запоминающее устройство (ROM) 202 хранит данные и программы, подлежащие исполнению посредством MPU 201. Оперативное запоминающее устройство (RAM) 203 временно сохраняет данные обработки, чтобы исполняться посредством MPU 201, и данные, принимаемые от хост-компьютера 214.
Формирователь 207 сигналов управления печатающей головкой управляет печатающей головкой 7. Формирователь 208 сигналов управления двигателем каретки управляет двигателем 204 каретки, чтобы приводить в движение каретку 10. Двигатель 205 транспортировки приводит в движение транспортирующий валик 5 и выводной валик 9. Формирователь 209 сигналов управления двигателем транспортировки управляет двигателем 205 транспортировки. Двигатель 206 подачи приводит в движение захватный валик 2 и подающий валик 3. Формирователь 210 сигналов управления двигателем подачи управляет двигателем 206 подачи.
В хост-компьютере 214 формирователь 2141 сигналов управления принтером используется для осуществления связи с печатающим устройством путем накопления информации печати, такой как печатное изображение и качество печатного изображения, когда пользователь предписывает исполнение операции печати. MPU 201 осуществляет обмен печатным изображением и подобным с хост-компьютером 214 через блок 213 интерфейса (I/F).
Операция непрерывной подачи с перекрытием будет описываться во временной последовательности со ссылкой на ST1-ST9 по Фиг. 1-3. Когда хост-компьютер 214 передает данные печати через блок 213 интерфейса, данные печати обрабатываются посредством MPU 201 и затем загружаются в RAM 203. MPU 201 запускает операцию печати на основании загруженных данных.
Описание будет обеспечиваться со ссылкой на ST1 по Фиг. 1. Формирователь 210 сигналов управления двигателем подачи приводит в действие двигатель 206 подачи с низкой скоростью. Он вращает захватный валик 2 (первый подающий валик) со скоростью 7,6 дюйма/с. Когда захватный валик 2 вращается, захватывается верхний лист для печати (предыдущий лист 1-A), уложенный в стопу на подающем лотке 11. Предыдущий лист 1-A, захваченный захватным валиком 2, транспортируется подающим валиком 3 (второй подающий валик), вращающимся в том же направлении, что и захватный валик 2. Двигатель 206 подачи также приводит в движение подающий валик 3.
Когда датчик 16 обнаружения листа, обеспеченный на стороне выхода подающего валика 3, обнаруживает передний край предыдущего листа 1-A, двигатель 206 подачи переключается на приведение в движение с высокой скоростью. То есть, захватный валик 2 и подающий валик 3 вращаются со скоростью 20 дюймов/с.
Описание будет представлено со ссылкой на ST2 по Фиг. 1. Когда подающий валик 3 непрерывно вращается, передний край предыдущего листа 1-A поворачивает рычаг 17 прижима листа вокруг вращающегося вала 17b в направлении по часовой стрелке к усилию механического смещения пружины. Когда подающий валик 3 далее непрерывно вращается, передний край предыдущего листа 1-A упирается в участок транспортирующего зазора-захвата, образуемый транспортирующим валиком 5 и прижимным роликом 6. В это время транспортирующий валик 5 останавливается. Вращением подающего валика 3 на заранее заданную величину даже после того, как передний край предыдущего листа 1-A упирается в участок транспортирующего зазора-захвата, выполняется выравнивание предыдущего листа 1-A, чтобы скорректировать перекос, тогда как передний край предыдущего листа 1-A упирается в участок транспортирующего зазора-захвата. Операция коррекции перекоса будет также именоваться операцией корректировки совмещения.
Описание будет представлено со ссылкой на ST3 по Фиг. 1. По окончании операции коррекции перекоса предыдущего листа 1-A двигатель 205 транспортировки приводится в действие, чтобы запустить вращение транспортирующего валика 5. Транспортирующий валик 5 транспортирует лист со скоростью 15 дюймов/с. После того, как предыдущий лист 1-A выравнивается с позицией, обращенной к печатающей головке 7, операция печати выполняется путем выпуска краски из печатающей головки 7 на основании данных печати. Следует отметить, что операция выравнивания выполняется путем обеспечения прилегания переднего края листа для печати к участку транспортирующего зазора-захвата, чтобы временно позиционировать лист для печати в позиции транспортирующего валика 5, и регулирования величины вращения транспортирующего валика 5 относительно позиции транспортирующего валика 5.
Печатающее устройство по этому варианту осуществления является печатающим устройством последовательного типа, в котором каретка 10 удерживает печатающую головку 7. Операция печатания листа для печати выполняется путем повторения операции транспортировки по периодической транспортировке листа для печати на заранее заданную величину с использованием транспортирующего валика 5 и операции формирования изображения по выпуску краски из печатающей головки 7 при перемещении при этом каретки 10, включающей в себя печатающую головку 7, когда транспортирующий валик 5 останавливается.
Когда выполняется выравнивание предыдущего листа 1-A, двигатель 206 подачи переключается на приведение в движение с малой скоростью. Таким образом, захватный валик 2 и подающий валик 3 вращаются со скоростью 7,6 дюйма/с. Тогда как транспортирующий валик 5 периодически транспортирует лист для печати на заранее заданную величину, двигатель 206 подачи также периодически приводит в движение подающий валик 3. То есть, пока транспортирующий валик 5 вращается, подающий валик 3 также вращается. Тогда как транспортирующий валик 5 останавливается, подающий валик 3 также останавливается. Скорость вращения подающего валика 3 ниже, чем таковая транспортирующего валика 5. Следовательно, лист протягивается между транспортирующим валиком 5 и подающим валиком 3. Подающий валик 3 вращается вместе с листом для печати, транспортируемым транспортирующим валиком 5.
Поскольку двигатель 206 подачи периодически приводится в действие, приводной вал 19 также приводится в действие. Как описано выше, скорость вращения захватного валика 2 ниже таковой для транспортирующего валика 5. Следовательно, захватный валик 2 вращается вместе с листом для печати, транспортируемым транспортирующим валиком 5. То есть, захватный валик 2 вращается ранее приводного вала 19. Более конкретно, выступ 19a приводного вала 19 расположен на расстоянии от первой поверхности 2a и упирается во вторую поверхность 2b. Следовательно, второй лист для печати (последующий лист 1-B) не захватывается непосредственно после прохождения заднего края предыдущего листа 1-A через захватный валик 2. После того, как приводной вал 19 приводится в движение в течение заранее заданного времени, выступ 19a упирается в первую поверхность 2a, и захватный валик 2 начинает вращаться.
Описание будет представлено со ссылкой на ST4 по Фиг. 2. В ST4 показывается состояние, в котором захватный валик 2 начинает вращаться и захватывает последующий лист 1-B. Вследствие фактора, такого как чувствительность датчика, датчик 16 обнаружения листа требует заранее заданного или большего интервала между печатными листами, чтобы обнаруживать края листов для печати. Таким образом, необходимо отделять передний край последующего листа 1-B от заднего края предыдущего листа 1-A на заранее заданное расстояние, чтобы обеспечить заранее заданный временной интервал от того момента, когда датчик 16 обнаружения листа обнаруживает задний край предыдущего листа 1-A, до момента, пока не обнаружит передний край последующего листа 1-B. Для осуществления этого, угол вогнутой части 2c захватного валика 2 устанавливается приблизительно в 70°.
Описание будет представлено со ссылкой на ST5 по Фиг. 2. Последующий лист 1-B, захваченный захватным валиком 2, транспортируется подающим валиком 3. В это время предыдущий лист 1-A подвергается операции формирования изображения печатающей головкой 7 на основании данных печати. Когда датчик 16 обнаружения листа обнаруживает передний край последующего листа 1-B, двигатель 206 подачи переключается на приведение в движение с высокой скоростью. То есть, захватный валик 2 и подающий валик 3 вращаются со скоростью 20 дюймов/секунду.
Описание будет представлено со ссылкой на ST6 по Фиг. 2. Рычаг 17 прижима листа нажимает задний край предыдущего листа 1-A вниз, как показано в ST5 на Фиг. 2. Является возможным формировать состояние, в котором передний край последующего листа 1-B перекрывает задний край предыдущего листа 1-A путем перемещения последующего листа 1-B со скоростью более высокой, чем та, с которой предыдущий лист 1-A перемещается ниже согласно операции печати печатающей головки 7 (ST6 на Фиг. 2). Поскольку предыдущий лист 1-A подвергается операции печати на основании данных печати, он периодически транспортируется транспортирующим валиком 5. С другой стороны, после того, как датчик 16 обнаружения листа обнаруживает передний край последующего листа 1-B, последующий лист 1-B может выравниваться с предыдущим листом 1-A путем непрерывного вращения подающего валика 3 со скоростью 20 дюймов/с.
Описание будет представлено со ссылкой на ST7 по Фиг. 3. После формирования состояния перекрытия, в котором передний край последующего листа 1-B перекрывает задний край предыдущего листа 1-A, последующий лист 1-B транспортируется подающим валиком 3 до тех пор, пока передний край последующего листа 1-B не остановится в заранее заданной позиции по ходу выше участка транспортирующего зазора-захвата. Позиция переднего края последующего листа 1-B вычисляется исходя из величины вращения (поворота) подающего валика 3 после того, как датчик 16 обнаружения листа обнаруживает передний край последующего листа 1-B, и регулируется на основании результата вычисления. В это время предыдущий лист 1-A подвергается операции формирования изображения на основании данных печати печатающей головкой 7.
Описание будет представлено со ссылкой на ST8 по Фиг. 3. Когда транспортирующий валик 5 останавливается для выполнения операции формирования изображения (операции выпуска краски) для последней строки предыдущего листа 1-A, подающий валик 3 приводится в движение для обеспечения прилегания переднего края листа 1-B для печати к участку транспортирующего зазора-захвата, посредством этого выполняя операцию коррекции перекоса последующего листа 1-B.
Описание будет представлено со ссылкой на ST9 по Фиг. 3. Когда операция формирования изображения для последней строки предыдущего листа 1-A оканчивается, возможно выполнять выравнивание последующего листа 1-B, поддерживая при этом состояние, в котором последующий лист 1-B перекрывает предыдущий лист 1-A, путем вращения транспортирующего валика 5 на заранее заданную величину. Последующий лист 1-B подвергается операции печати печатающей головкой 7 на основании данных печати. Когда последующий лист 1-B периодически транспортируется для операции печати, предыдущий лист 1-A также периодически транспортируется и в заключение выгружается вовне печатающего устройства посредством выводного валика 9.
Когда выполняется выравнивание последующего листа 1-B, двигатель 206 подачи переключается на приведение в движение с малой скоростью. Таким образом, захватный валик 2 и подающий валик 3 вращаются со скоростью 7,6 дюйма/с. Если имеются данные печати даже после последующего листа 1-B, процесс возвращается к ST4 по Фиг. 2 для захвата третьего листа для печати.
Фиг. 6A и 6B являются блок-схемами, иллюстрирующими операции непрерывной подачи с перекрытием согласно этому варианту осуществления. На этапе S1, когда хост-компьютер 214 передает данные печати через блок 213 интерфейса, операция печати начинается. На этапе S2 начинается операция подачи предыдущего листа 1-A. Более конкретно, двигатель 206 подачи приводится в действие с малой скоростью. Захватный валик 2 вращается со скоростью 7,6 дюйма/с. Захватный валик 2 захватывает предыдущий лист 1-A, и подающий валик 3 подает предыдущий лист 1-A к печатающей головке 7.
На этапе S3 датчик 16 обнаружения листа обнаруживает передний край предыдущего листа 1-A. Когда датчик 16 обнаружения листа обнаруживает передний край предыдущего листа 1-A, двигатель 206 подачи переключается на приведение в движение с высокой скоростью на этапе S4. То есть, захватный валик 2 и подающий валик 3 вращаются со скоростью 20 дюймов/с. На этапе S5 путем регулирования величины вращения подающего валика 3 после того, как датчик 16 обнаружения листа обнаруживает передний край предыдущего листа 1-A, передний край предыдущего листа 1-A вынуждают прилегать к участку транспортирующего зазора-захвата, чтобы выполнить операцию коррекции перекоса предыдущего листа 1-A.
На этапе S6 выравнивание предыдущего листа 1-A выполняется на основании данных печати. То есть, предыдущий лист 1-A транспортируется к позиции старта печати относительно позиции транспортирующего валика 5 на основании данных печати путем регулирования величины вращения транспортирующего валика 5. На этапе S7 двигатель 206 подачи переключается на приведение в движение с малой скоростью. На этапе S8 операция печати начинается, когда печатающая головка 7 осуществляет выпуск краски на предыдущий лист 1-A. Более конкретно, операция печати предыдущего листа 1-A выполняется путем повторения операции транспортировки по периодической транспортировке предыдущего листа 1-A транспортирующим валиком 5 и операции формирования изображения (операции выпуска краски) по выпуску краски из печатающей головки 7 при перемещении каретки 10. Двигатель 206 подачи периодически приводится в действие с малой скоростью в синхронизации с операцией периодической транспортировки предыдущего листа 1-A транспортирующим валиком 5. То есть, захватный валик 2 и подающий валик 3 периодически вращаются со скоростью 7,6 дюйма/с.
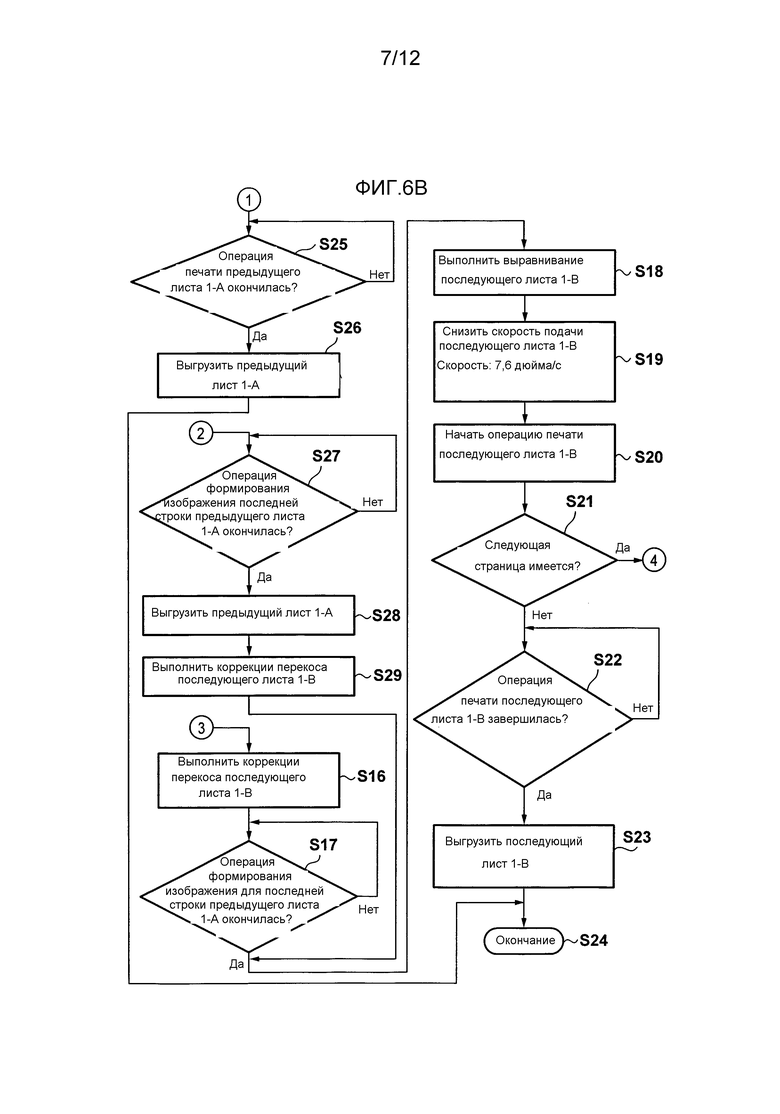
На этапе S9 определяется, имеются ли данные печати для следующей страницы. Если нет данных печати для следующей страницы, процесс переходит на этап S25. После завершения операции печати предыдущего листа 1-A на этапе S25, предыдущий лист 1-A выгружается на этапе S26, посредством этого завершая операцию печати.
Если имеются данные печати для следующей страницы, операция подачи последующего листа 1-B начинается на этапе S10. Более конкретно, захватный валик 2 захватывает последующий лист 1-B, и подающий валик 3 подает последующий лист 1-B к печатающей головке 7. Захватный валик 2 вращается со скоростью 7,6 дюйма/с. Как описано выше, поскольку большая вогнутая часть 2c захватного валика 2 обеспечивается по отношению к выступу 19a приводного вала 19, последующий лист 1-B подается при наличии заранее заданного интервала по отношению к заднему краю предыдущего листа 1-A.
На этапе S11 датчик 16 обнаружения листа обнаруживает передний край последующего листа 1-B. Когда датчик 16 обнаружения листа обнаруживает передний край последующего листа 1-B, двигатель 206 подачи переключается на приведение в движение с высокой скоростью на этапе S12. То есть, захватный валик 2 и подающий валик 3 вращаются со скоростью 20 дюймов/с. На этапе S13 путем регулирования величины вращения подающего валика 3 после того, как датчик 16 обнаружения листа обнаруживает передний край последующего листа 1-B, последующий лист 1-B транспортируется так, что его передний край находится в позиции заранее заданной величины перед участком транспортирующего зазора-захвата. Предыдущий лист 1-A периодически транспортируется на основании данных печати. Непрерывное приведение в действие двигателя 206 подачи с высокой скоростью формирует состояние перекрытия, в котором передний край последующего листа 1-B перекрывает задний край предыдущего листа 1-A.
На этапе S14 определяют, удовлетворяются ли заранее заданные условия (будут описаны далее). Если заранее заданные условия удовлетворены, то на этапе S15 определяется, началась ли операция формирования изображения предыдущего листа 1-A. Если определено, что операция формирования изображения началась, процесс переходит на этап S16; иначе процесс находится в дежурном режиме до тех пор, пока не начнется операция формирования изображения. На этапе S16 передний край последующего листа 1-B вынуждают прилегать к участку транспортирующего зазора-захвата при поддержании при этом состояния перекрытия, таким образом выполняя операцию коррекции перекоса последующего листа 1-B. Если на этапе S17 определено, что операция формирования изображения для последней строки предыдущего листа 1-A окончилась, на этапе S18 выравнивание последующего листа 1-B выполняется при поддержании состояния перекрытия.
Если на этапе S14 определяется, что заранее заданные условия не удовлетворяются, состояние перекрытия отменяется, чтобы выполнить выравнивание последующего листа 1-B. Более конкретно, если на этапе S27 определено, что операция формирования изображения для последней строки предыдущего листа 1-A окончилась, операция выгрузки предыдущего листа 1-A выполняется на этапе S28. В течение этой операции двигатель 206 подачи не приводится в действие, и таким образом последующий лист 1-B останавливается, тогда как его передний край находится в позиции на заранее заданную величину перед участком транспортирующего зазора-захвата. Поскольку предыдущий лист 1-A выгружен, состояние перекрытия отменяется. На этапе S29 передний край последующего листа 1-B вынуждают прилегать к участку транспортирующего зазора-захвата, чтобы выполнить операцию коррекции перекоса последующего листа 1-B. На этапе S18 выполняется выравнивание последующего листа 1-B.
На этапе S19 двигатель 206 подачи переключается на приведение в движение с малой скоростью. На этапе S20 операция печати начинается выпуском краски из печатающей головки 7 на последующий лист 1-B. Более конкретно, операция печати последующего листа 1-B выполняется путем повторения (выполнения управления печатью) операции транспортировки по периодической транспортировке последующего листа 1-B транспортирующим валиком 5 и операции формирования изображения (операции выпуска краски) по выпуску краски из печатающей головки 7 при перемещении каретки 10. Двигатель 206 подачи периодически приводится в действие с малой скоростью в синхронизации с операцией периодической транспортировки последующего листа 1-B транспортирующим валиком 5. То есть, захватный валик 2 и подающий валик 3 периодически вращаются со скоростью 7,6 дюйма/с.
На этапе S21 определяют, имеются ли данные печати для следующей страницы. Если имеются данные печати для следующей страницы, процесс возвращается на этап S10. Если нет данных печати для следующей страницы, когда операция формирования изображения для последующего листа 1-B завершена на этапе S22, операция выгрузки последующего листа 1-B выполняется на этапе S23 и операция печати оканчивается на этапе S24.
Фиг. 7 и 8 являются видами для пояснения операции обеспечения перекрытия последующим листом предыдущего листа согласно этому варианту осуществления. Будет описываться операция образования состояния перекрытия, в котором передний край последующего листа перекрывает задний край предыдущего листа, которая была пояснена на этапах S12 и S13 по Фиг. 6.
Фиг. 7 и 8 являются увеличенными видами, каждый из них показывает участок между участком транспортирующего зазора-захвата, образуемым подающим валиком 3 и ведомым валиком 4 подачи, и участком транспортирующего зазора-захвата, образуемым транспортирующим валиком 5 и прижимным роликом 6.
Три состояния в процессе транспортировки листов для печати транспортирующим валиком 5 и подающим валиком 3 будут последовательно описываться. Первое состояние, в котором выполняется операция по обеспечению отслеживания последующим листом предыдущего листа, будет описано со ссылкой на ST1 и ST2 по Фиг. 7. Второе состояние, в котором выполняется операция по обеспечению перекрытия последующим листом предыдущего листа, будет описано со ссылкой на ST3 и ST4 по Фиг. 8. Третье состояние, в котором определяется, выполнять ли операцию коррекции перекоса последующего листа при поддержании при этом состояния перекрытия, будет описано со ссылкой на ST5 по Фиг. 8.
В ST1 по Фиг. 7 подающим валиком 3 управляют, чтобы транспортировать последующий лист 1-B, и датчик 16 обнаружения листа обнаруживает передний край последующего листа 1-B. Секция от датчика 16 обнаружения листа до позиции P1, в которой последующий лист 1-B может вынуждаться перекрывать предыдущий лист 1-A, определена как первая секция A1. В первой секции A1 выполняется операция по обеспечению отслеживания передним краем последующего листа 1-B заднего края предыдущего листа 1-A. Решение о позиции P1 принимается на основании компоновки механизма.
В первом состоянии операцию отслеживания можно остановить в первой секции A1. Если, как показано в ST2 на Фиг. 7, передний край последующего листа 1-B проходит задний край предыдущего листа 1-A до позиции P1, операция по обеспечению перекрытия последующим листом предыдущего листа не выполняется.
В ST3 по Фиг. 8 секция от вышеописанной позиции P1 до позиции P2, в которой обеспечивается рычаг 17 прижима листа, определяется как вторая секция A2. Во второй секции A2 выполняется операция по обеспечению перекрытия последующим листом 1-B предыдущего листа 1-A.
Во втором состоянии операцию по обеспечению перекрытия последующим листом предыдущего листа можно остановить во второй секции A2. Если, как показано в ST4 по Фиг. 8, передний край последующего листа 1-B не может поравняться с задним краем предыдущего листа 1-A внутри второй секции A2, невозможно выполнять операцию обеспечения перекрытия последующим листом предыдущего листа.
В ST5 Фиг. 8 секция от вышеописанной позиции P2 до позиции P3 определяется как третья секция A3. Позиция P3 является позицией переднего края последующего листа, когда последующий лист останавливается на этапе S13 по Фиг. 6. Тогда как последующий лист 1-B перекрывает предыдущий лист 1-A, последующий лист 1-B транспортируется так, что его передний край достигает позиции P3. В третьей секции A3 определяется, выполнять ли выравнивание последующего листа 1-B обеспечением его прилегания к участку транспортирующего зазора-захвата при поддержании при этом состояния перекрытия. То есть, определяется, выполнять ли выравнивание последующего листа путем выполнения операции коррекции перекоса при поддержании при этом состояния перекрытия или выполнять выравнивание последующего листа путем отмены состояния перекрытия и выполнения операции коррекции перекоса.
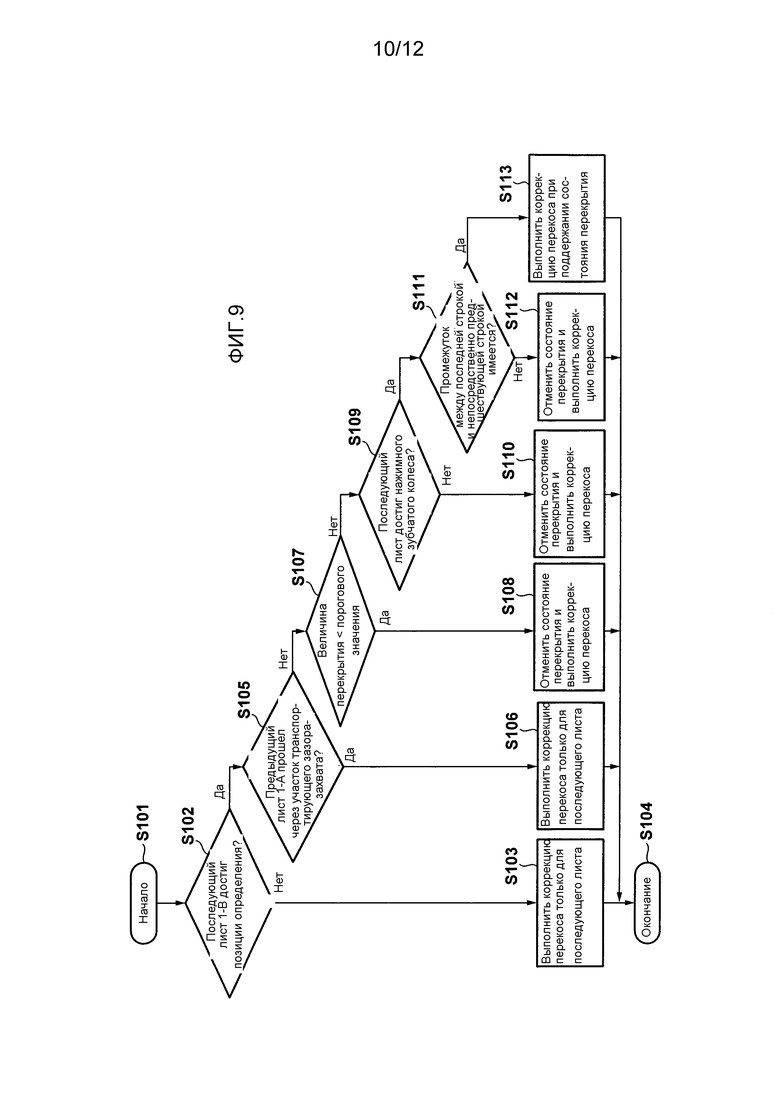
Фиг. 9 является блок-схемой для пояснения операции коррекции перекоса последующего листа согласно этому варианту осуществления. Обработка определения, удовлетворяются ли заранее заданные условия, которая была пояснена на этапе S14 Фиг. 6, будет описываться подробно.
Будет описываться операция определения, выполнять ли операцию коррекции перекоса обеспечением прилегания переднего края последующего листа 1-B к участку транспортирующего зазора-захвата при поддержании при этом состояния перекрытия между предыдущим листом 1-A и последующим листом 1-B или выполнять операцию коррекции перекоса путем отмены состояния перекрытия между предыдущим листом 1-A и последующим листом 1-B и затем обеспечения прилегания переднего края последующего листа 1-B к участку транспортирующего зазора-захвата.
На этапе S101 операция начинается. На этапе S102 определяется, достиг ли передний край последующего листа 1-B позиции определения (позиция P3 в ST5 по Фиг. 8). Если передний край последующего листа 1-B не достиг позиции определения (НЕТ на этапе S102), является неясным, прилегает ли передний край последующего листа 1-B к участку транспортирующего зазора-захвата согласно транспортировке последующего листа 1-B на заранее заданную величину, и таким образом принимается решение об операции коррекции перекоса только для последующего листа (этап S103), посредством этого завершая операцию определения (этап S104). То есть, после прохождения заднего края предыдущего листа 1-A через участок транспортирующего зазора-захвата только последующий лист 1-B вынуждают прилегать к участку транспортирующего зазора-захвата, чтобы выполнить операцию коррекции перекоса, и затем выполняется выравнивание только последующего листа 1-B.
С другой стороны, если определено, что последующий лист 1-B достиг позиции определения P3 (ДА на этапе S102), определяется, прошел ли задний край предыдущего листа 1-A через участок транспортирующего зазора-захвата (этап S105). Если определено, что задний край предыдущего листа 1-A прошел через участок транспортирующего зазора-захвата (ДА на этапе S105), последующий лист не перекрывает предыдущий лист, и таким образом принимается решение об операции коррекции перекоса только для последующего листа (этап S106). То есть, только последующий лист 1-B вынуждают прилегать к участку транспортирующего зазора-захвата, чтобы выполнить операцию коррекции перекоса, и затем выполняется выравнивание только последующего листа 1-B.
С другой стороны, если определено, что задний край предыдущего листа 1-A не прошел через участок транспортирующего зазора-захвата (НЕТ на этапе S105), то определяется, является ли величина перекрытия заднего края предыдущего листа 1-A и переднего края последующего листа 1-B меньше, чем пороговое значение (этап S107). Позиция заднего края предыдущего листа 1-A обновляется вместе с операцией печати предыдущего листа 1-A. Позиция переднего края последующего листа 1-B находится в вышеописанной позиции определения. То есть, величина перекрытия уменьшается вместе с операцией печати предыдущего листа 1-A. Если определено, что величина перекрытия меньше, чем пороговое значения (ДА на этапе S107), то состояние перекрытия отменяется и принимается решение об операции коррекции перекоса только для последующего листа (этап S108). То есть, после завершении операции формирования изображения предыдущего листа 1-A последующий лист 1-B не транспортируется вместе с предыдущим листом 1-A. Более конкретно, двигатель 205 транспортировки приводит в движение транспортирующий валик 5, чтобы транспортировать предыдущий лист 1-A. Однако подающий валик 3 не приводится в движение. Следовательно, состояние перекрытия отменяется. Кроме того, только последующий лист 1-B вынуждают прилегать к участку транспортирующего зазора-захвата, чтобы выполнить операцию коррекции перекоса, и затем выполняется выравнивание только последующего листа 1-B.
Если определено, что величина перекрытия равна или больше, чем пороговое значения (НЕТ на этапе S107), то определяется, достиг ли последующий лист 1-B нажимного зубчатого колеса 12, когда выполняется выравнивание последующего листа 1-B (этап S109). Если определено, что последующий лист 1-B не достиг нажимного зубчатого колеса 12 (НЕТ на этапе S109), состояние перекрытия отменяется, и принимается решение об операции коррекции перекоса только для последующего листа (этап S110). То есть, после завершения операции формирования изображения предыдущего листа 1-A, последующий лист 1-B не транспортируется вместе с предыдущим листом 1-A. Более конкретно, двигатель 205 транспортировки приводит в движение транспортирующий валик 5, чтобы транспортировать предыдущий лист 1-A. Однако подающий валик 3 не приводится в движение. Следовательно, состояние перекрытия отменяется. Кроме того, только последующий лист 1-B вынуждают прилегать к участку транспортирующего зазора-захвата, чтобы выполнить операцию коррекции перекоса, и затем выполняется выравнивание только последующего листа 1-B.
Если определено, что последующий лист 1-B достиг нажимного зубчатого колеса 12 (ДА на этапе S109), то определяют, имеется ли промежуток между последней строкой предыдущего листа и строкой, непосредственно предшествующей последней строке (этап S111). Если определено, что промежуток отсутствует (НЕТ на этапе S111), состояние перекрытия отменяется и принимается решение об операции коррекции перекоса только для последующего листа (этап S112). Если определено, что промежуток имеется (ДА на этапе S111), операция коррекции перекоса последующего листа 1-B выполняется при поддержании при этом состояния перекрытия и выполняется выравнивание последующего листа 1-B. То есть, после завершения операции формирования изображения предыдущего листа 1-A, последующий лист 1-B вынуждают прилегать к участку транспортирующего зазора-захвата с перекрытием предыдущего листа 1-A. Более конкретно, транспортирующий валик 5 и подающий валик 3 вращаются путем приведения в действие двигателя 206 подачи вместе с двигателем 205 транспортировки. После операции коррекции перекоса выполняется выравнивание последующего листа 1-B, тогда как последующий лист 1-B перекрывает предыдущий лист 1-A.
Как описано выше, выполняется операция определения, сохранить ли или отменить состояние перекрытия между предыдущим листом 1-A и последующим листом 1-B.
Фиг. 10 является блок-схемой для пояснения схемы вычисления позиции переднего края последующего листа после выравнивания последующего листа согласно этому варианту осуществления.
На этапе S201 процесс начинается. На этапе S202 загружается пригодная для печати область формата (с размером) листа. Поскольку верхняя пригодная для печати позиция, то есть, верхнее граничное поле указывается, то верхнее граничное поле для области печати устанавливается в качестве позиции переднего края (этап S203). Следует отметить, что позиция переднего края задается расстоянием от участка транспортирующего зазора-захвата.
Первые данные печати загружаются (этап S204). С помощью этой обработки указывается позиция первых данных печати от переднего края листа, и таким образом определяется, является ли расстояние между передним краем листа и первыми данными печати больше, чем ранее установленная позиция переднего края (этап S205). Если расстояние между передним краем листа и первыми данными печати больше, чем ранее установленная позиция переднего края (ДА на этапе S205), позиция переднего края обновляется расстоянием между передним краем листа и первыми данными печати (этап S206). Если расстояние между передним краем листа и первыми данными печати является равным или меньшим, чем ранее установленная позиция переднего края (НЕТ на этапе S205), процесс переходит на этап S207.
Затем, генерируется первая инструкция перемещения каретки (этап S207). Определяется, является ли величина транспортировки листа для первого перемещения каретки больше, чем ранее установленная позиция переднего края (этап S208). Если величина транспортировки листа для первого перемещения каретки больше, чем ранее установленная позиция переднего края (ДА на этапе S208), позиция переднего края обновляется величиной транспортировки листа для первого перемещения каретки (этап S209). Если величина транспортировки листа для первого перемещения каретки равна или меньше, чем ранее установленная позиция переднего края (НЕТ на этапе S208), позиция переднего края не обновляется. Таким образом позиция переднего края последующего листа 1-B подтверждается (этап S210), и процесс завершается (этап S211).
Как описано выше, согласно вышеупомянутому варианту осуществления путем определения, транспортировать ли последующий лист в позицию, обращенную к печатающей головке 7, поддерживая при этом состояние перекрытия, когда передний край последующего листа 1-B вынуждают перекрыть задний край предыдущего листа 1-A, является возможным начинать подачу последующего листа, даже если предельная величина заднего края предыдущего листа 1-A и таковая для переднего края последующего листа не подтверждаются.
При выполнении операции печати для предыдущего листа 1-A печатающей головкой 7 двигатель 206 подачи приводится в действие в синхронизации с двигателем 205 транспортировки до того, как датчик 16 обнаружения листа обнаружит передний край последующего листа 1-B, и двигатель 206 подачи непрерывно приводится в действие после того, как датчик 16 обнаружения листа обнаружит передний край последующего листа, посредством этого позволяя выполнять операцию отслеживания, чтобы обеспечить перекрытие последующим листом предыдущего листа.
(ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ)
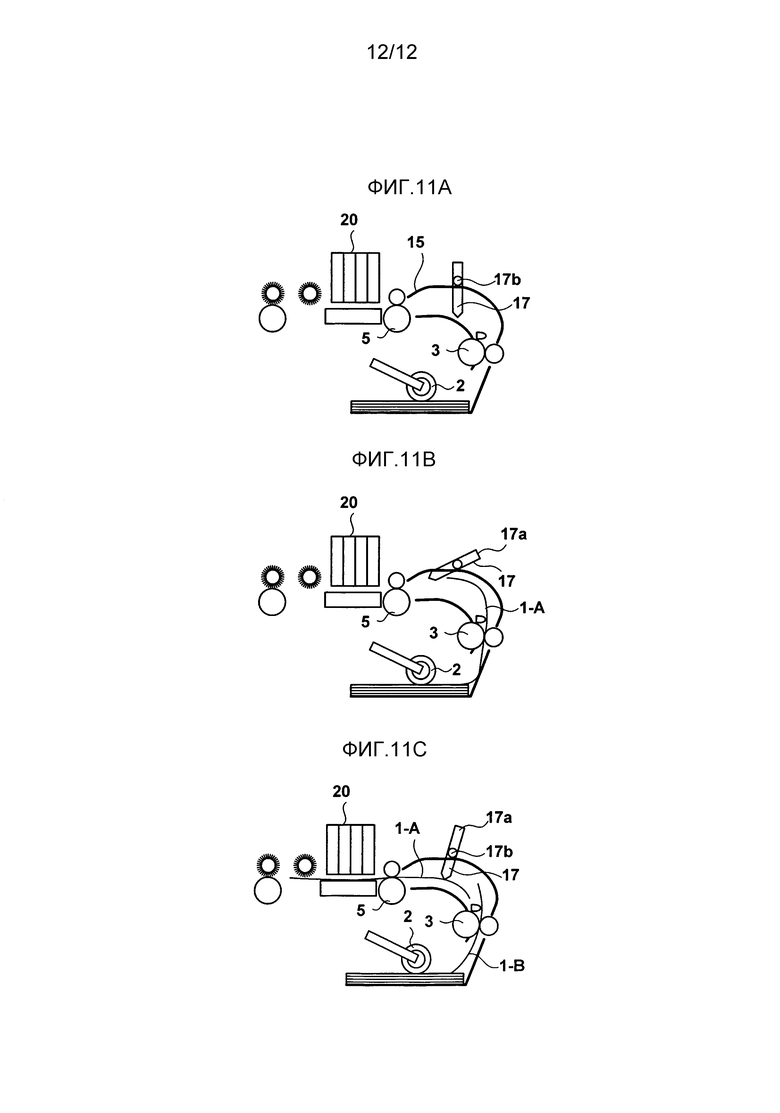
Печатающее устройство согласно второму варианту осуществления настоящего изобретения будет описано далее. В первом варианте осуществления было пояснено печатающее устройство последовательного типа, в котором каретка 10 удерживает печатающую головку 7. Напротив, во втором варианте осуществления используется печатающая головка 20 линейного типа, в котором массив сопел для распыления краски сформирован внутри диапазона, покрывающего максимальную ширину листов, как показано на фигурах Фиг. 11A-11C.
Печатающая головка 20 линейного типа выполняет, из вышеизложенного, обработку печати на листе, транспортируемом транспортирующим валиком 5 подобно печатающему устройству последовательного типа, таким образом формируя изображение. Однако, поскольку операция перемещения каретки не выполняется, время на остановку транспортирующего валика 5 становится ненужным.
В печатающей головке 20 линейного типа множество печатающих головок расположены параллельно вдоль направления транспортировки листа. В этом варианте осуществления печатающая головка 20 линейного типа включает в себя печатающие головки, соответствующие четырем цветам C (голубой), М (пурпурный), Y (желтый) и K (черный). Следует отметить, что каждое число из числа цветов и числа печатающих головок не ограничивается четырьмя. Соответственные цветные краски подаются из резервуаров с краской (не показаны) в соответственного цвета сопла печатающей головки 20 линейного типа через трубки для краски.
Такая же операция, как в первом варианте осуществления, выполняется до тех пор, пока захватный валик 2 не захватит предыдущий лист 1-A, транспортирующий валик 5 транспортирует его, и таким образом выполняется выравнивание предыдущего листа 1-A. После того, как выравнивание предыдущего листа 1-A выполнено, предыдущий лист 1-A непрерывно транспортируется транспортирующим валиком 5.
Следует отметить, что когда выравнивание предыдущего листа 1-A завершается, двигатель 206 подачи переключается на приведение в движение с малой скоростью на этапе S7 по Фиг. 6. При этой обработке захватный валик 2 и подающий валик 3 вращаются со скоростью 7,6 дюйма/с.
Если на этапе S9 по Фиг. 6 определено, что имеются данные печати следующей страницы, операция подачи последующего листа 1-B начинается на этапе S10. Как описано в первом варианте осуществления, последующий лист подается при наличии заранее заданного интервала относительно заднего края предыдущего листа.
Если датчик 16 обнаружения листа обнаруживает передний край последующего листа 1-B на этапе S11, двигатель 206 подачи переключается на приведение в движение с высокой скоростью на этапе S12. Предыдущий лист 1-A печатается на основании данных печати, являясь при этом непрерывно транспортируемым, как описано выше. С другой стороны, подающий валик 3 транспортирует последующий лист 1-B со скоростью выше, чем скорость транспортировки предыдущего листа 1-A посредством транспортирующего валика 5, например, с 20 дюймов/с. Следовательно, является возможным формировать состояние, в котором передний край последующего листа 1-B перекрывает задний край предыдущего листа 1-A.
В операции формирования изображения печатающей головкой 20 линейного типа отсутствует время на остановку транспортирующего валика 5 для операции формирования изображения для последней строки. Следовательно, при выполнении операции коррекции перекоса последующего листа, операция транспортировки предыдущего листа временно останавливается. Путем обеспечения такого времени останова, в печатающей головке 20 линейного типа также, является возможным выполнять операцию коррекции перекоса в то время, как последующий лист перекрывает предыдущий лист после выполнения операции отслеживания и операции перекрытия предыдущего листа и последующего листа.
ДРУГИЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ
Вариант(ы) осуществления настоящего изобретения также можно реализовывать посредством компьютера системы или устройства, который считывает и выполняет исполнимые компьютером инструкции (например, одну или несколько программ), записанные на носителе данных (который также может именоваться более полно как 'невременный читаемый компьютером носитель данных'), чтобы выполнять функции одного или нескольких из вышеописанных вариантов(а) осуществления и/или он включает в себя одну или несколько схем (например, специализированную интегральную схему (ASIC)) для выполнения функций из одного или нескольких вышеописанных вариантов(а) осуществления и посредством способа, выполняемого компьютером системы или устройства путем, например, считывания и исполнения исполнимых компьютером инструкций с носителя данных, чтобы выполнять функции одного или нескольких вышеописанных вариантов(а) осуществления и/или путем управления одной или несколькими схемами, чтобы выполнять функции одного или нескольких вышеописанных вариантов(а) осуществления. Компьютер может содержать один или несколько процессоров (например, центральный процессор (CPU), микропроцессорный блок (MPU)) и может включать в себя сеть отдельных компьютеров или отдельных процессоров, чтобы считывать и исполнять исполнимые компьютером инструкции. Исполнимые компьютером инструкции могут предоставляться на компьютер, например, из сети или с носителя данных. Носитель данных может включать в себя, например, одно или несколько из накопителя на жестком диске, оперативного запоминающего устройства (RAM), постоянного запоминающего устройства (ROM), хранилища распределенных вычислительных систем, оптического диска (такого как компакт-диск (CD), цифровой многофункциональный диск (DVD) или диск по технологии Blu-ray (BD)™), устройства флэш-памяти, карты памяти и подобного.
Тогда как настоящее изобретение было описано со ссылкой на примеры осуществления, нужно понимать, что изобретение не ограничивается раскрытыми примерами осуществления. Объем последующей формулы изобретения должен получить самое широкое толкование так, чтобы охватить все такие модификации и эквивалентные структуры и функции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО, СПОСОБ УПРАВЛЕНИЯ ДЛЯ НЕГО И НОСИТЕЛЬ ДАННЫХ | 2015 |
|
RU2616547C2 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2015 |
|
RU2614606C2 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2015 |
|
RU2655243C1 |
| КАРТРИДЖ И ПЕЧАТАЮЩЕЕ УСТРОЙСТВО | 2008 |
|
RU2416524C2 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО | 2003 |
|
RU2256560C2 |
| СТРУЙНОЕ ПЕЧАТАЮЩЕЕ УСТРОЙСТВО И СПОСОБ ВОССТАНОВЛЕНИЯ ПЕЧАТАЮЩЕЙ ГОЛОВКИ | 2012 |
|
RU2497683C2 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО И ПЕЧАТАЮЩЕЕ УСТРОЙСТВО | 2009 |
|
RU2417151C2 |
| УСТРОЙСТВО ОБРАБОТКИ БУМАЖНЫХ ЛИСТОВ | 2011 |
|
RU2491640C2 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО, СПОСОБ УПРАВЛЕНИЯ ДЛЯ ПЕЧАТАЮЩЕГО УСТРОЙСТВА И НОСИТЕЛЬ ДАННЫХ | 2015 |
|
RU2631768C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ, СПОСОБ ОБРАБОТКИ ЗАДАНИЙ ПЕЧАТИ И КОМПЬЮТЕРНЫЙ НОСИТЕЛЬ ИНФОРМАЦИИ | 2008 |
|
RU2420410C1 |







Печатающее устройство включает в себя первый подающий валик, двигатель подачи, выполненный с возможностью приводить в движение первый подающий валик, второй подающий валик, транспортирующий валик, двигатель транспортировки, выполненный с возможностью приводить в движение транспортирующий валик, печатающий блок, выполненный с возможностью печати на листе для печати, датчик обнаружения, выполненный с возможностью обнаружения переднего края листа для печати, и блок управления, выполненный с возможностью, когда печатающий блок выполняет операцию печати на предыдущем листе, приводить в действие двигатель подачи в синхронизации с двигателем транспортировки до момента обнаружения датчиком обнаружения переднего края последующего листа и непрерывно приводить в действие двигатель подачи так, что скорость транспортировки последующего листа двигателем подачи становится выше, чем таковая для предыдущего листа, после обнаружения датчиком обнаружения переднего края последующего листа. 3 н. и 4 з.п. ф-лы, 11 ил.
1. Печатающее устройство, содержащее:
первый подающий валик, выполненный с возможностью подачи листа для печати;
двигатель подачи, выполненный с возможностью приводить в движение упомянутый первый подающий валик;
второй подающий валик, приводимый в движение упомянутым двигателем подачи и выполненный с возможностью транспортировки листа для печати, подаваемого упомянутым первым подающим валиком;
транспортирующий валик, выполненный с возможностью транспортировки листа для печати, транспортируемого упомянутым вторым подающим валиком;
двигатель транспортировки, выполненный с возможностью приводить в движение упомянутый транспортирующий валик;
печатающий блок, выполненный с возможностью печати на листе для печати, транспортируемом упомянутым транспортирующим валиком;
каретку, на которую установлен упомянутый печатающий блок, для перемещения в пересекающем направлении, которое пересекает направление, в котором транспортируется лист для печати;
блок управления печатью, выполненный с возможностью печати изображения на листе для печати путем повторения операции периодической транспортировки листа для печати упомянутым транспортирующим валиком и операции перемещения упомянутой каретки в пересекающем направлении;
блок обнаружения, расположенный между упомянутым вторым подающим валиком и упомянутым транспортирующим валиком, выполненный с возможностью обнаружения переднего края листа для печати; и
блок управления, выполненный с возможностью, при выполнении упомянутым печатающим блоком операции печати на предыдущем листе в качестве листа для печати, предыдущим по очереди поданного, периодически приводить в действие упомянутый двигатель подачи в синхронизации с упомянутым двигателем транспортировки до обнаружения упомянутым блоком обнаружения переднего края последующего листа в качестве листа для печати, последующим по очереди поданного, и непрерывно приводить в действие упомянутый двигатель подачи после обнаружения упомянутым блоком обнаружения переднего края последующего листа.
2. Устройство по п. 1, в котором последующий лист начинает подаваться при наличии заранее заданного интервала относительно заднего края предыдущего листа.
3. Устройство по п. 1, в котором при непрерывном приведении в действие упомянутого двигателя подачи упомянутый блок управления осуществляет управление для обеспечения того, что передний край последующего листа перекрывает задний край предыдущего листа, транспортируемого упомянутым транспортирующим валиком.
4. Устройство по п. 1, в котором, когда операция транспортировки предыдущего листа останавливается, упомянутый блок управления осуществляет управление для выполнения коррекции перекоса последующего листа обеспечением прилегания последующего листа к упомянутому транспортирующему валику.
5. Устройство по п. 1, в котором скорость транспортировки листа для печати посредством упомянутого двигателя подачи, при непрерывном приведении в действие упомянутого двигателя подачи, устанавливается на скорость не ниже, чем скорость транспортировки листа для печати посредством упомянутого двигателя транспортировки.
6. Способ управления печатающим устройством, включающим в себя первый подающий валик, выполненный с возможностью подачи листа для печати, двигатель подачи, выполненный с возможностью приводить в движение первый подающий валик, второй подающий валик, приводимый в движение двигателем подачи и выполненный с возможностью транспортировки листа для печати, поданного первым подающим валиком, транспортирующий валик, выполненный с возможностью транспортировки листа для печати, транспортируемого вторым подающим валиком, двигатель транспортировки, выполненный с возможностью приводить в движение транспортирующий валик, печатающий блок, выполненный с возможностью печати на листе для печати, транспортируемом транспортирующим валиком, каретку, на которую установлен печатающий блок, для перемещения в пересекающем направлении, которое пересекает направление, в котором транспортируется лист для печати, блок управления печатью, выполненный с возможностью печати изображения на листе для печати путем повторения операции периодической транспортировки листа для печати транспортирующим валиком и операции перемещения каретки в пересекающем направлении, и блок обнаружения, расположенный между вторым подающим валиком и транспортирующим валиком, выполненный с возможностью обнаружения переднего края листа для печати, при этом упомянутый способ содержит:
этап управления, на котором, когда печатающий блок выполняет операцию печати на предыдущем листе в качестве листа для печати, предыдущим по очереди поданного, периодически приводят в действие двигатель подачи в синхронизации с двигателем транспортировки до обнаружения блоком обнаружения переднего края последующего листа в качестве листа для печати, последующим по очереди поданного, и непрерывно приводят в действие двигатель подачи после обнаружения блоком обнаружения переднего края последующего листа.
7. Читаемый компьютером носитель данных, хранящий программу для побуждения исполнения компьютером каждого этапа способа по п. 6.
| JP H0656299 A, 01.03.1994 | |||
| US 2004051237 A1, 18.03.2004 | |||
| US 2009302530 A1, 10.12.2009 | |||
| JP H05294496 A, 09.11.1993. |

