Изобретение относится к ультразвуковым средствам измерения вязкости жидких сред, а более конкретно к магнитострикционным вискозиметрам, и предназначено для контроля в реальном масштабе времени работоспособности рабочих жидкостей, в частности гидравлического, компрессорного, трансмиссионного, моторного и трансформаторного масла, а также для контроля технологических процессов переработки материалов.
Вязкость является одним из важнейших физико-химических показателей качества и состояния жидких сред. Смазочные масла классифицируются по их вязкости, которая нормируется и указывается в сертификате на продукцию. Измерение вязкости смазочных масел в процессе эксплуатации механизмов характеризует работоспособность масла, что позволяет проводить замену масла по его фактическому состоянию.
Наиболее широко для измерения вязкости используются ультразвуковые вискозиметры, принцип действия которых основан на зависимости характера колебаний контактирующего с жидкостью вибратора от ее вязкости. Вибраторы продольных колебаний обычно представляют собой стержень или узкую пластинку из магнитострикционного материала, которые совершают свободные или вынужденные колебания на частоте резонанса /Ультразвук. Маленькая энциклопедия. Глав. ред. И.П.Голямина. - М.: «Советская энциклопедия», 1979. - С.62, 63/.
Известен способ измерения вязкости, включающий погружение магнитострикционного элемента в контролируемую жидкую среду, создание в зоне размещения магнитострикционного элемента переменного магнитного поля, возбуждающего продольные колебания этого элемента, отключение переменного магнитного поля, определение скорости затухания амплитуды колебаний, генерированных в катушке магнитострикционным элементом, вычисление вязкости жидкой среды /Патент США №2839915, МПК G01N 11/10, 11/16, опубл. 24 июня, 1958; Патент Германии №19902991, МПК G01N 11/16, опубл. 7 июня 2000/. Недостатком способа является сложность реализации, так как требуется определять для каждого вискозиметра константу инструмента и учитывать ее при вычислении вязкости. Кроме того, температурные изменения свойств магнитострикционного элемента, в частности его резонансной частоты, снижают точность измерения вязкости.
Ближайшим техническим решением к предлагаемому (прототип) является способ оперативного контроля вязкости жидких сред, включающий погружение магнитострикционного элемента в контролируемую жидкую среду, создание в зоне размещения магнитострикционного элемента постоянного подмагничивающего поля и переменного магнитного поля, возбуждающего продольные колебания магнитострикционного элемента, отключение переменного магнитного поля, определение резонансной частоты сигнала, генерированного в катушке магнитострикционным элементом и вычисление вязкости жидкой среды /Патент США №6397661, МПК G01N 11/10, опубл. 04.07.2002/. Недостатком способа является то, что не учитывается значительное влияние температуры магнитострикционного элемента на частоту его собственных колебаний, что снижает точность измерения вязкости жидких сред.
Известно также устройство для измерения вязкости жидкости, содержащее датчик, в U-образном кронштейне которого вставлен между струнами магнитострикционный элемент (пластинка из аморфного металлического сплава). Доля длины пластины, погружаемой в контролируемую жидкость, регулируется с помощью винта или специального поплавка, поддерживающего постоянную глубину погружения пластины в жидкость. Датчик соединен беспроводной линией связи с электронным блоком /Loiselle K. and Grimes C.A. Viscosity measurements of viscous liquids using magnetoelastic thick-film sensors / Review of Scientific Instruments, 2000, vol.71, no.3, pp.1441-1446/. Недостатком известного устройства является то, что его конструкция требует наличия открытой поверхности жидкости и, кроме того, переменный электромагнитный сигнал, генерируемый сенсором, не передается через металлические стенки конструкций систем циркуляции жидкости из-за экранирования, вследствие чего дистанционный магнитострикционный вискозиметр может использоваться только как лабораторный или портативный прибор и не может встраиваться в линию смазки. Кроме того, магнитострикционный элемент жестко не зафиксирован, что влияет на точность измерений вязкости.
Наиболее близким по технической сущности к предлагаемому изобретению (прототип) является устройство оперативного контроля вязкости жидких сред, содержащее датчик, в корпусе которого установлены магнитострикционный элемент, закрепленный в его узловой точке, и электромагнитная катушка, витки которой охватывают магнитострикционный элемент, и электронный блок, соединенный электрическим кабелем с датчиком /Патент США №2839915, МПК G01N 11/10, 11/16, опубл. 24 июня, 1958/. Недостатком известного устройства является то, что не учитывается температурное изменение частоты собственных колебаний магнитострикционного элемента, что снижает точность измерения вязкости. Кроме того, магнитострикционный элемент закреплен в корпусе через мембранный узел, через который на колебания магнитострикционного элемента оказывают влияние внешние вибрации, что также снижает точность измерений. Магнитострикционный элемент имеет относительно большие габариты и не защищен от механических повреждений, что снижает надежность работы устройства.
Задачей изобретения является повышение точности оперативного контроля вязкости жидких сред, повышение надежности работы и уменьшение габаритов устройства.
Задача решается за счет того, что предлагаемый способ оперативного контроля вязкости жидких сред, включающий погружение магнитострикционного элемента в контролируемую жидкую среду, создание в зоне размещения магнитострикционного элемента постоянного подмагничивающего поля и переменного магнитного поля, возбуждающего продольные колебания магнитострикционного элемента, отключение переменного магнитного поля, определение резонансной частоты сигнала, генерированного в катушке магнитострикционным элементом, вычисление вязкости жидкой среды, дополнен новой совокупностью операций, которая заключается в том, что осуществляют контроль температуры магнитострикционного элемента и проводят компенсацию температурной зависимости частоты собственных колебаний магнитострикционного элемента перед вычислением вязкости жидкой среды.
Для выполнения температурной компенсации перед проведением контроля жидких сред измеряют температурную зависимость частоты собственных колебаний магнитострикционного элемента на воздухе.
При этом измерение температурной зависимости частоты собственных колебаний магнитострикционного элемента включает следующие операции: установку магнитострикционного элемента в воздушную камеру нагрева, задание начальной температуры воздуха камеры и шага увеличения температуры, создание в зоне размещения магнитострикционного элемента постоянного подмагничивающего поля и переменного магнитного поля, возбуждающего продольные колебания магнитострикционного элемента, отключение переменного магнитного поля, определение для каждого заданного значения температуры воздуха резонансной частоты сигнала, генерированного в катушке магнитострикционным элементом, измерение температуры воздуха в зоне расположения магнитострикционного элемента, определение аналитической температурной зависимости резонансной частоты сигнала и запись ее в память микроконтроллера.
Новая совокупность операций повышает точность определения резонансной частоты сигнала, а следовательно, и точность определения вязкости жидкости.
Для осуществления предложенного способа предлагается устройство, включающее датчик, в корпусе которого установлены магнитострикционный элемент, закрепленный в его узловой точке, и электромагнитная катушка, витки которой охватывают магнитострикционный элемент, и электронный блок, соединенный электрическим кабелем с датчиком, согласно изобретению в корпусе дополнительно вмонтирован измеритель температуры, а магнитострикционный элемент закреплен в корпусе датчика через демпфирующий узел, при этом корпус имеет отверстия для протекания жидкой среды к измерителю температуры и магнитострикционному элементу, причем электромагнитная катушка намотана на внешней поверхности корпуса симметрично относительно концов магнитострикционного элемента.
Введение в конструкцию устройства измерителя температуры позволяет контролировать одновременно температуру жидкости и магнитострикционного элемента для реализации компенсации изменения собственной частоты колебаний магнитострикционного элемента от его температуры и повышения точности определения вязкости жидкости. Кроме того, закрепление магнитострикционного элемента в корпусе датчика через демпфирующий узел исключает влияние внешней среды на частоту резонансных колебаний магнитострикционного элемента, в результате чего повышается точность оперативного контроля вязкости жидких сред и надежность работы устройства. Наличие отверстий для протекания жидкой среды к измерителю температуры и магнитострикционному элементу позволяет устанавливать устройство в систему циркуляции масла для выполнения оперативного контроля вязкости (измерений в реальном масштабе времени), обеспечить защиту магнитострикционного элемента от механических повреждений и повысить надежность устройства. Расположение электромагнитной катушки на внешней поверхности корпуса симметрично относительно концов магнитострикционного элемента повышает эффективность преобразования энергии переменного магнитного поля катушки в энергию продольных колебаний магнитострикционного элемента, что позволяет уменьшить габариты устройства.
Для защиты магнитострикционного элемента от механического повреждения и повышения надежности работы устройства на погружаемом в жидкую среду торце корпуса установлена защитная сетка.
Причем предпочтительное расположение электромагнитной катушки в кольцевой канавке внешней поверхности корпуса, охватывающей магнитострикционный элемент в его центральной части, позволяет зафиксировать положение витков катушки, что повышает надежность конструкции устройства.
Кроме того, для обеспечения соответствия показаний измерителя температуры температуре магнитострикционного элемента измеритель температуры закреплен на расстоянии не более 3 мм от магнитострикционного элемента.
При этом магнитострикционный элемент выполнен из относительно дешевого аморфного металлического сплава, в частности из аморфного металлического стекла Metglas 2826 MB состава Fe40Ni38Mo4B18, который имеет высокий коэффициент магнитомеханической связи (эффективность преобразования магнитной энергии в упругую) - 0,98, в то время как наиболее широко используемые никелевые магнитострикционные сплавы имеют коэффициент около 0,4. Использование такого материала позволяет уменьшить размер электромагнитной катушки, а следовательно, и устройства в целом.
Предпочтительное использование в качестве измерителя температуры малогабаритного термометра сопротивления или термопары позволяет получать высокую точность измерения температуры, а следовательно, и точность измерения вязкости при малых габаритах устройства.
Указанная новая совокупность операций и последовательность их выполнения, а также дополнительные конструктивные элементы, методы закрепления конструктивных элементов, их взаимное расположение и материал, из которого изготовлены детали устройства, позволяют повысить точность оперативного контроля вязкости жидких сред, повысить надежность работы устройства и уменьшить его габариты.
Предлагаемые изобретения иллюстрируются чертежами, на которых изображены:
на фиг.1 приведена конструкция встроенного в бак с жидкой средой предлагаемого устройства для осуществления предложенного способа оперативного контроля вязкости жидких сред;
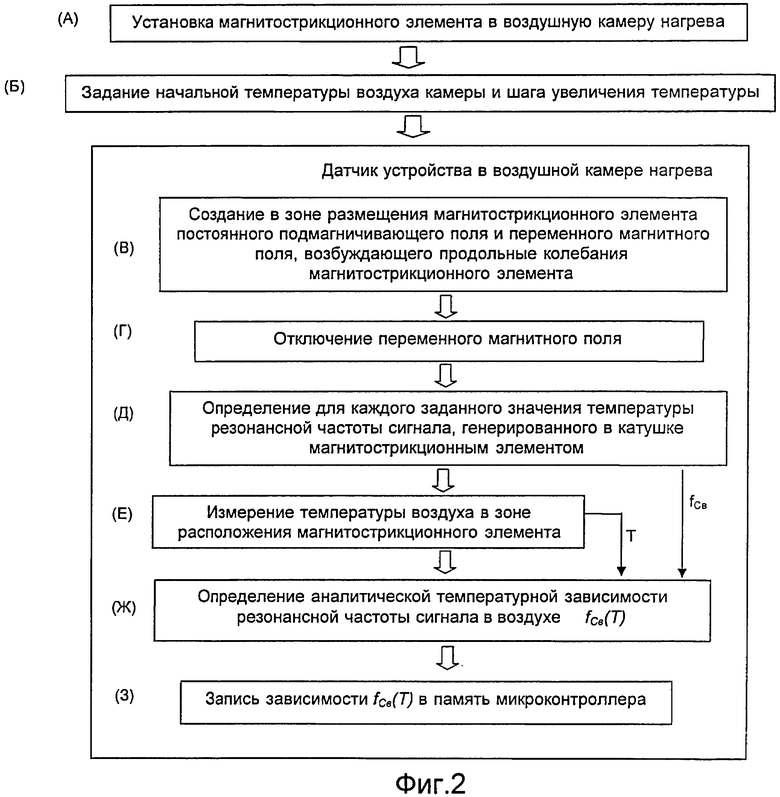
на фиг.2 показана последовательность операций при выполнении компенсации температурной зависимости частоты собственных колебаний магнитострикционного элемента;
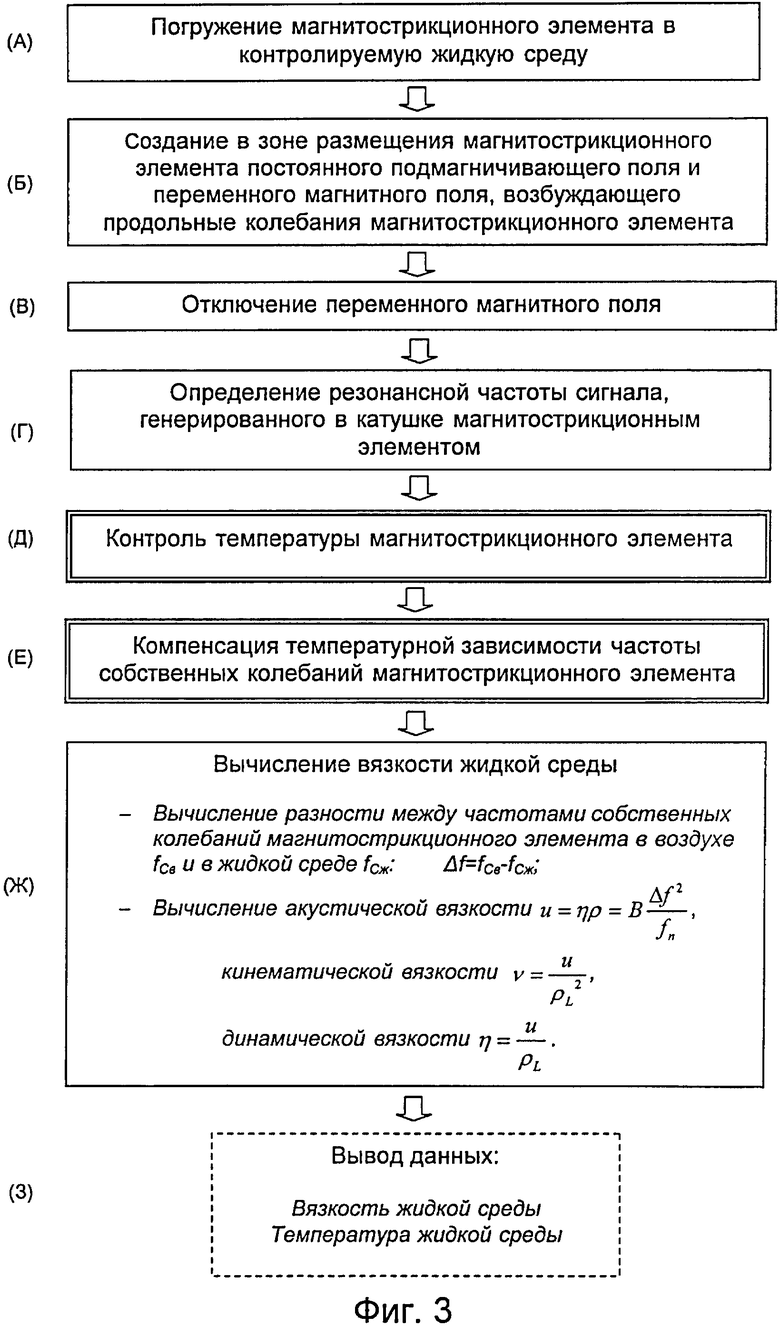
на фиг.3 - последовательность выполнения операций предлагаемого способа измерения вязкости;
на фиг.4 и фиг.5 приведены теоретические температурные зависимости вязкости масла и измеренные значения вязкости при тестировании синтетического масла РАО#4 с низкой вязкостью (фиг.4) и минерального масла Р-480 высокой вязкости (фиг.5);
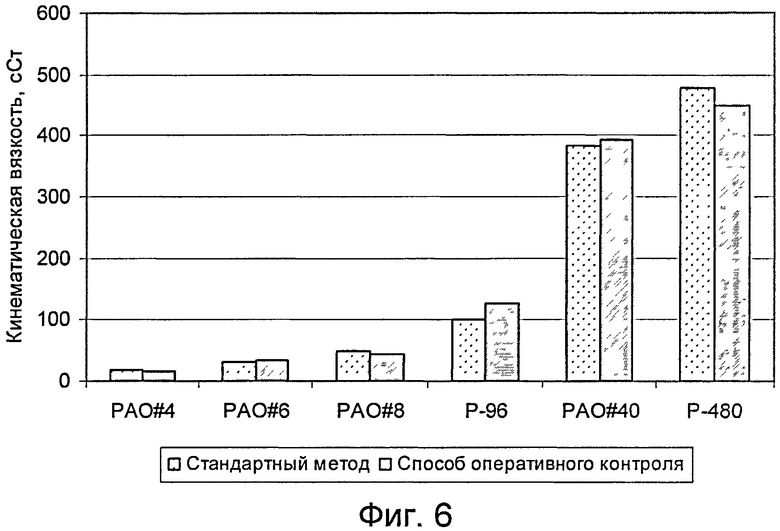
на фиг.6 представлены результаты измерения вязкости синтетических и минеральных масел предлагаемым устройством и стандартным методом при температуре 40°С.
Основные узлы устройства, реализующего способ оперативного контроля вязкости жидких сред, показаны на фиг.1. Устройство состоит из датчика 1 и электронного блока 2. Датчик с помощью резьбового соединения 9 и уплотнительного кольца 8 устанавливается в бак с контролируемой жидкостью или в трубу, по которой прокачивается жидкость. Датчик содержит корпус 3, в котором закреплен через демпфирующий узел 5 магнитострикционный элемент 4 в его узловой точке. Магнитострикционный элемент представляет собой тонкую пластинку размером 37 мм × 6 мм × 0,03 мм, выполненную из аморфного металлического стекла Metglas 2826 MB. На внешней поверхности корпуса 3 (в кольцевой канавке, охватывающей магнитострикционный элемент в его центральной части) намотана электромагнитная катушка 6 симметрично относительно концов магнитострикционного элемента 4, при этом витки катушки охватывают магнитострикционный элемент. В корпусе 3 также вмонтирован измеритель температуры 7 на расстоянии h=1 мм (не более 3 мм) от магнитострикционного элемента 4. Измеритель температуры представляет собой термометр сопротивления, в частности термометр платиновый (тип MR518G, фирмы Heraeus) с диаметром 1,8 мм и длиной 5 мм, который обеспечивает точность измерения ±0,1°С. Корпус имеет отверстия для протекания жидкой среды к измерителю температуры 7 и магнитострикционному элементу 4. Торец корпуса закрыт защитной сеткой 13. Датчик 1 соединен с электронным блоком 2 электрическим кабелем 10.
Предлагаемый способ осуществляется следующим образом. Перед использованием устройства (один раз после его изготовления) для контроля вязкости жидких сред выполняют измерение температурной зависимости частоты собственных колебаний магнитострикционного элемента. Процедура измерения температурной зависимости приведена на фиг.2 и включает в себя следующие шаги. (А) - датчик 1 устройства устанавливается в воздушную камеру нагрева, а соединенный с ним электрическим кабелем электронный блок 2 монтируется вне камера. (Б) - задается начальная температура воздуха камеры и шаг увеличения температуры. Диапазон изменения температуры выбирается согласно ожидаемому диапазону изменения температуры контролируемой жидкости. (В) - создание в зоне размещения магнитострикционного элемента постоянного подмагничивающего поля и переменного магнитного поля следующим образом. Через витки электромагнитной катушки 6 пропускается постоянный ток, создающий постоянное магнитное поле, которое подмагничивает магнитострикционный элемент 4, создавая условия эффективной работы магнитострикционного элемента, т.е. максимального значения магнитострикции насыщения. Одновременно через витки катушки 6 пропускается переменный ток с начальной частотой fСв,MIN, который создает переменное магнитное поле, возбуждающее продольные упругие колебания магнитострикционного элемента 4. Значение начальной частоты выбирается таким образом, чтобы длина магнитострикционного элемента соответствовала длине α, возбуждаемой стоячей волны на ожидаемой частоте собственных колебаний при начальной температуре камеры нагрева. При этом реализуется крепление магнитострикционного элемента 4 в его узловой точке в корпусе 3 через демпфирующий узел 5. (Г) - отключается переменный ток, а магнитострикционный элемент 4 продолжает колебаться на собственной частоте, зависящей от температуры, в которую помещен магнитострикционный элемент. Упругие колебания магнитострикционного элемента 4 генерируют в катушке 6 переменный ток, частота которого fСв определяется частотой колебаний элемента 4. (Д) - температура в камере нагрева изменяется с заданным шагом и для каждого значения температуры определяется резонансная частота сигнала. (Е) - с помощью измерителя температуры 7 определяется температура Т в зоне расположения магнитострикционного элемента. (Ж) - считываются значения температуры Т и соответствующей собственной частоты fСв магнитострикционного элемента и определяется аналитическая температурная зависимость резонансной частоты в воздухе fСв(Т). (З) - установленная зависимость, записанная в память микроконтроллера, используется для компенсации температурной зависимости собственных колебаний магнитострикционного элемента при контроле вязкости жидкой среды.
Последовательность выполнения операций измерения вязкости поясняется на фиг.3. (А) - датчик 1 с помощью резьбового соединения 9 и уплотнительного кольца 8 устанавливается в бак с контролируемой жидкостью или в трубу, по которой прокачивается жидкость. Жидкость через отверстия в корпусе 3 заполняет его внутреннюю полость, в которой размещены измеритель температуры 7 и магнитострикционный элемент 4. (Б) - через витки электромагнитной катушки 6 пропускается постоянный ток, создающий постоянное магнитное поле, которое подмагничивает магнитострикционный элемента 4, создавая условия эффективной работы магнитострикционный элемента, т.е. максимального значения магнитострикции насыщения. Одновременно через витки катушки 6 пропускается переменный ток с начальной частотой fВMIN, который создает переменное магнитное поле, возбуждающее продольные упругие колебания магнитострикционного элемента 4. Значение начальной частоты выбирается таким образом, чтобы при измерении максимального значения ηmax из диапазона контролируемой вязкости ηMIN…ηMAX длина магнитострикционного элемента соответствовала длине К возбуждаемой стоячей волны. При этом реализуется крепление магнитострикционного элемента λ в его узловой точке в корпусе 3 через демпфирующий узел 5. (В) - отключается переменный ток, а магнитострикционный элемент 4 продолжает колебаться на собственной частоте, зависящей от вязкости жидкой среды, в которую помещен магнитострикционный элемент. Упругие колебания магнитострикционного элемента 4 генерируют в катушке 6 переменный ток, частота которого fСж определяется частотой колебаний элемента 4. (Г) - для определения частоты fСж изменяется частота fВ возбуждающего переменного тока в диапазоне fBMIN…fBMAX (fBMAX определяется минимальным значением измеряемой вязкости ηmin), и регистрируется частота fВ, на которой наблюдается резонанс, т.е. совпадение fСж=fВ. (Д) - контроль температуры магнитострикционного элемента 4 осуществляется путем измерения температуры Т жидкой среды вблизи (на расстоянии h=1 мм) элемента 4 с помощью измерителя температуры 7. (Е) - компенсация температурной зависимости частоты собственных колебаний магнитострикционного элемента состоит в определении из аналитической зависимости, хранящейся в памяти микроконтроллера, частоты fcв собственных колебаний магнитострикционного элемента на воздухе, соответствующей измеренной температуре Т. (Ж) - вычисление акустической вязкости u (произведение динамической вязкости η на плотность ρ жидкой среды), по формуле:
где B - постоянная, определяемая свойствами магнитострикционного элемента;
Δf=fСв-fСж.
Зная плотность жидкости, вычисляется кинематическая v и динамическая вязкость, согласно формулам:
(З) - на дисплей электронного блока выводится вязкость жидкой среды и температура Т, при которой измерена вязкость, что имеет важное значение, так как вязкость жидкости в большой степени зависит от температуры.
На фиг.4 и фиг.5 приведены теоретические температурные зависимости вязкости масла и измеренные значения вязкости при тестировании синтетического масла РАО#4 с низкой вязкостью (фиг.4) и минерального масла Р-480 высокой вязкости (фиг.5). Температурные зависимости рассчитывались согласно стандарту /ASTM D341. Standard Test Method for Viscosity-Temperature Charts for Liquid Petroleum Products/. Высокая корреляция результатов получена благодаря использованию температурной компенсации в предлагаемом способе.
На фиг.6 представлены результаты измерения вязкости четырех синтетических (РАО#4, РАО#6, РАО#9 и РАО#40) и двух минеральных (Р-96 и Р-480) масел предлагаемым устройством и стандартным методом / ГОСТ 33-2000. Нефтепродукты. Прозрачные и непрозрачные жидкости. Определение кинематической вязкости и расчет динамической вязкости / при температуре 40°С. Видно, что результаты, полученные предлагаемым способом оперативного контроля вязкости, коррелируют с результатами лабораторных измерений во всем измеряемом диапазоне.
Приведенные данные на фиг.4, фиг.5 и фиг.6 свидетельствует о применимости предлагаемого устройства для оперативного контроля вязкости жидкости в широком диапазоне от 15 сСт до 2500 сСт.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ УСКОРЕНИЙ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ | 2011 |
|
RU2490649C2 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ МОЛЕКУЛЯРНО-МАССОВОГО РАСПРЕДЕЛЕНИЯ ПОЛИМЕРА В РАСТВОРЕ | 2011 |
|
RU2475732C1 |
| Вибрационный вискозиметр | 1988 |
|
SU1516885A1 |
| МАРКЕР ДЛЯ ИСПОЛЬЗОВАНИЯ В МАГНИТОМЕХАНИЧЕСКОЙ СИСТЕМЕ ЭЛЕКТРОННОГО КОНТРОЛЯ ТОВАРОВ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И СИСТЕМА ДЛЯ ЕГО ИСПОЛЬЗОВАНИЯ | 1995 |
|
RU2126553C1 |
| Способ неразрушающего контроля магнито-СТРиКциОННыХ МАТЕРиАлОВ | 1979 |
|
SU845079A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ | 2011 |
|
RU2466411C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ | 2011 |
|
RU2490608C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2465605C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРНОГО КОЭФФИЦИЕНТА ЧАСТОТЫ | 1998 |
|
RU2143705C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ | 2011 |
|
RU2491555C2 |
Изобретение относится к ультразвуковым средствам измерения вязкости жидких сред, а более конкретно к магнитострикционным вискозиметрам, и предназначено для контроля в реальном масштабе времени работоспособности рабочих жидкостей, в частности гидравлического, компрессорного, трансмиссионного, моторного и трансформаторного масла, а также для контроля технологических процессов переработки материалов. Способ оперативного контроля вязкости жидких сред включает погружение магнитострикционного элемента в контролируемую жидкую среду. Затем создают в зоне размещения магнитострикционного элемента постоянного подмагничивающего поля и переменного магнитного поля, возбуждающего продольные колебания магнитострикционного элемента, отключение переменного магнитного поля, определение резонансной частоты сигнала, генерированного в катушке магнитострикционным элементом. Далее осуществляют вычисление вязкости жидкой среды. Кроме того, перед вычислением вязкости жидкой среды в предложенном способе осуществляют контроль температуры магнитострикционного элемента и проводят компенсацию температурной зависимости частоты собственных колебаний магнитострикционного элемента. Техническим результатом изобретения является повышение точности оперативного контроля вязкости жидких сред и надежности работы, а также уменьшение габаритов устройства. 2 н. и 8 з.п. ф-лы, 6 ил.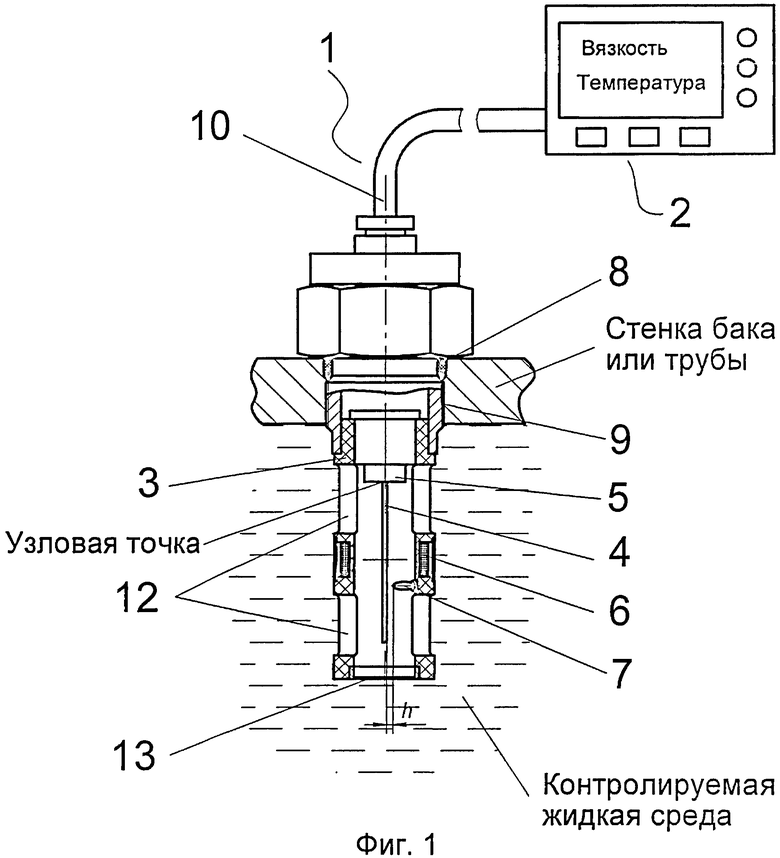
1. Способ оперативного контроля вязкости жидких сред, включающий погружение магнитострикционного элемента в контролируемую жидкую среду, создание в зоне размещения магнитострикционного элемента постоянного подмагничивающего поля и переменного магнитного поля, возбуждающего продольные колебания магнитострикционного элемента, отключение переменного магнитного поля, определение резонансной частоты сигнала, генерированного в катушке магнитострикционным элементом, вычисление вязкости жидкой среды, отличающийся тем, что осуществляют контроль температуры магнитострикционного элемента и проводят компенсацию температурной зависимости частоты собственных колебаний магнитострикционного элемента перед вычислением вязкости жидкой среды.
2. Способ по п.1, отличающийся тем, что перед проведением контроля жидких сред измеряется температурная зависимость частоты собственных колебаний магнитострикционного элемента на воздухе.
3. Способ по п.2, отличающийся тем, что измерение температурной зависимости частоты собственных колебаний магнитострикционного элемента включает установку магнитострикционного элемента в воздушную камеру нагрева, задание начальной температуры воздуха камеры и шага увеличения температуры, создание в зоне размещения магнитострикционного элемента постоянного подмагничивающего поля и переменного магнитного поля, возбуждающего продольные колебания магнитострикционного элемента, отключение переменного магнитного поля, определение для каждого заданного значения температуры воздуха резонансной частоты сигнала, генерированного в катушке магнитострикционным элементом, измерение температуры воздуха в зоне расположения магнитострикционного элемента, определение аналитической температурной зависимости резонансной частоты сигнала и запись ее в память микроконтроллера.
4. Устройство для осуществления способа оперативного контроля вязкости жидких сред, включающее датчик, в корпусе которого установлены магнитострикционный элемент, закрепленный в его узловой точке, и электромагнитная катушка, витки которой охватывают магнитострикционный элемент, и электронный блок, соединенный электрическим кабелем с датчиком, отличающееся тем, что в корпусе дополнительно вмонтирован измеритель температуры, а магнитострикционный элемент закреплен в корпусе датчика через демпфирующий узел, при этом корпус имеет отверстия для протекания жидкой среды к измерителю температуры и магнитострикционному элементу, причем электромагнитная катушка намотана на внешней поверхности корпуса симметрично относительно концов магнитострикционного элемента.
5. Устройство по п.4, отличающееся тем, что на погружаемом в жидкую среду торце корпуса установлена защитная сетка.
6. Устройство по п.4, отличающееся тем, что электромагнитная катушка намотана в кольцевой канавке внешней поверхности корпуса, охватывающей магнитострикционный элемент в его центральной части.
7. Устройство по п.4, отличающееся тем, что измеритель температуры закреплен на расстоянии не более 3 мм от магнитострикционного элемента.
8. Устройство по п.4, отличающееся тем, что магнитострикционный элемент выполнен из аморфного металлического сплава.
9. Устройство по п.4, отличающееся тем, что измеритель температуры представляет собой термометр сопротивления.
10. Устройство по п.4, отличающееся тем, что измеритель температуры представляет собой термопару.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОГНОЗНОГО ВИДЕОКОДИРОВАНИЯ | 2021 |
|
RU2839915C1 |
| Устройство для измерения вязкости жидких сред | 1990 |
|
SU1788461A1 |
| US 4875362 A, 24.10.1989 | |||
| Преобразователь фаза-интервалВРЕМЕНи | 1979 |
|
SU830463A1 |
| DE 19902991 C1, 07.06.2000. | |||

