Область техники
Изобретение относится к области измерительной техники и может быть использовано для измерения угловых перемещений, скоростей и ускорений летательных аппаратов, автомобилей и других контролируемых объектов в бесплатформенных инерциальных навигационных системах, а также роторов электрических машин.
Предшествующий уровень техники
Известен способ измерения угловой скорости объектов, описанный в кн. под редакцией Горенштейна И.А. Инерциальные навигационные системы. - М.: Машиностроение, 1970, с.145-147. В описании указанная книга обозначена как литература [1].
В указанном способе взвешивание гироскопического чувствительного элемента производится при помощи газового или воздушного подвеса, использующего подъемную силу сжатого газа или воздуха, поступающего из специального резервуара.
Низкая точность измерения двухстепенного гироскопического датчика угловой скорости с газовым подвесом чувствительного элемента, осуществляющего техническую реализацию указанного способа, определяется моментами, обусловленными неравномерностью действия вытекающих их капиллярных отверстий в стакане струй газа на взвешенный в газе корпус, обратными моментами (тяжением) датчиков угла и момента из-за сил электромагнитного взаимодействия полей их роторов и статоров, а также тяжением токопроводящих устройств гиромотора и датчиков угла и момента.
Наличие специального резервуара для газа или воздуха в конструкции указанного датчика снижает технологичность изготовления.
Наиболее близким аналогом - прототипом предлагаемого способа измерения параметров углового движения контролируемых объектов является способ измерения параметров углового движения объектов (см. описание в а.с. СССР №640207, МПК G01P 3/48, опубл. 27.02.79 г.).
Указанный способ измерения параметров углового движения объектов путем циклического измерения приращений по соответствующим осям углов поворота корпуса относительно инерционного тела. При этом измерение приращений в очередном цикле производят при полностью освобожденном от всех силовых связей с корпусом инерционным телом в заданном временном интервале, длительность которого выбирают, исходя из приращений угловой скорости объекта, определенной в предыдущем цикле.
Устройство, осуществляющее техническую реализацию указанного способа измерения параметров углового движения объектов - прототипа, содержит инерционное тело, датчик углового перемещения инерционного тела относительно корпуса, управляемые фиксаторы инерционного тела относительно корпуса.
В очередном цикле измерения предварительно зафиксированное относительно корпуса с помощью фиксатора инерционное тело освобождают на заданный по результатам измерений в предыдущем цикле временной интервал, в течение которого замеряют с помощью датчиков приращения угла поворота корпуса относительно инерционного тела. После этого инерционное тело снова фиксируется с помощью фиксаторов, одновременно возвращаясь относительно корпуса в первоначальное положение, и по результатам приращения угловой скорости объекта в очередном цикле определяют значение временного интервала для следующего цикла измерений.
Низкая точность измерения устройства, осуществляющего техническую реализацию способа измерения параметров углового движения объектов - прототипа, определяется наличием временных интервалов в течение которых измерения не производятся, что снижает точность измерения. При этом в указанных временных интервалах производится фиксация инерционного тела относительно корпуса, а также определение значения временного интервала для следующего цикла измерений.
При большом количестве циклов измерений происходит механический износ фиксаторов и инерционного тела за счет сухого трения между ними, возникающего в моменты фиксации и освобождения инерционного тела относительно корпуса, что снижает точность измерения и срок службы указанного устройства.
Низкая технологичность изготовления. определяется наличием фиксаторов в конструкции указанного устройства, реализующего способ-прототип.
Раскрытие изобретения
Задачей создания изобретения является разработка способа, а также создание устройства, имеющего более высокую точность измерения, технологичного в изготовлении с более длительным сроком службы для реализации предлагаемого способа измерения параметров углового движения контролируемых объектов.
Поставленная задача решается с помощью признаков, указанных в 1-м пункте формулы изобретения, общих со способом - прототипом, таких как способ измерения параметров углового движения контролируемых объектов путем циклического измерения приращений угла поворота инерционного тела относительно корпуса в заданном временном интервале, и отличительных существенных признаков, таких как, два инерционных тела выполняют из магнитострикционного материала, помещают в две газообразные среды с разными значениями давления и возбуждают механические колебания в двух инерционных телах под действием приложенного к двум инерционным телам переменного магнитного поля, возбуждают резонансные колебания электромагнитного поля в двенадцати колебательных контурах, изменяют токи, протекающие через двенадцать катушек индуктивности подкачки энергии в двенадцать колебательных контуров, при изменении указанных токов наводят электродвижущие силы взаимоиндукции в двенадцати катушках индуктивности двенадцати колебательных контуров, под действием которых увеличивают амплитуды резонансных колебаний электромагнитного поля в двенадцати колебательных контурах, изменяют емкости двенадцати колебательных контуров, а приращения углов поворота двух инерционных тел относительно корпуса в заданном временном интервале измеряют за счет изменения частот резонансных колебаний электромагнитного поля двенадцати колебательных контуров.
В пункте 2 формулы нашел отражение частотный диапазон механических колебаний двух инерционных тел, а именно механические колебания в двух инерционных телах возбуждают ультразвуковой частотой в диапазоне от 20 кГц и до 50 кГц.
В предлагаемом способе измерения параметров углового движения контролируемых объектов в двух инерционных телах, выполненных из магнитострикционного материала и помещенных в две газообразные среды с разными значениями давления, возбуждают механические колебания под действием приложенного к двум инерционным телам переменного магнитного поля ультразвуковой частоты в диапазоне от 20 кГц и до 50 кГц.
При этом происходит аэродинамическое взвешивание двух инерционных тел внутри корпуса устройства, осуществляющего техническую реализацию предлагаемого способа измерения параметров углового движения контролируемых объектов.
Вследствие этого полностью отсутствует сухое трение между двумя инерционными телами и корпусом указанного устройства, что повышает точность измерения и длительность срока службы.
В предлагаемом способе измерения параметров углового движения контролируемых объектов циклическое измерение приращений углов поворота двух инерционного тела относительно корпуса в заданном временном интервале измеряют за счет изменений емкостей и частот резонансных колебаний электромагнитного поля двенадцати колебательных контуров. Вследствие этого происходит уменьшение влияния на результат измерения изменений геометрических размеров двух инерционных тел при их механических колебаниях в двух газообразных средах с разными значениями давления внутри корпуса указанного устройства, что повышает точность измерения.
Вышеперечисленная совокупность существенных признаков позволяет получить следующий технический результат - повышение точности измерения, технологичности изготовления и срока службы устройства, осуществляющего техническую реализацию предлагаемого способа измерения параметров углового движения контролируемых объектов.
Краткое описание фигур чертежей
Датчик угловой скорости иллюстрируется следующими чертежами:
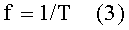
Фиг.1. Датчик угловой скорости, продольный разрез.
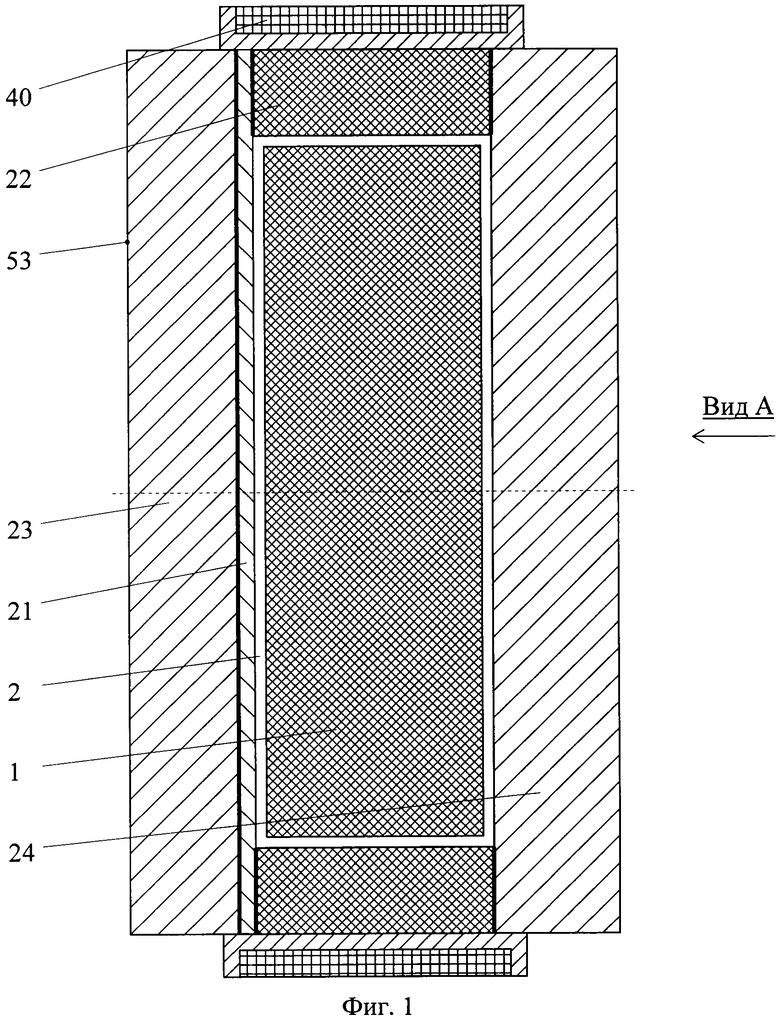
Фиг.2 и фиг.3. Структурная схема датчика угловой скорости.
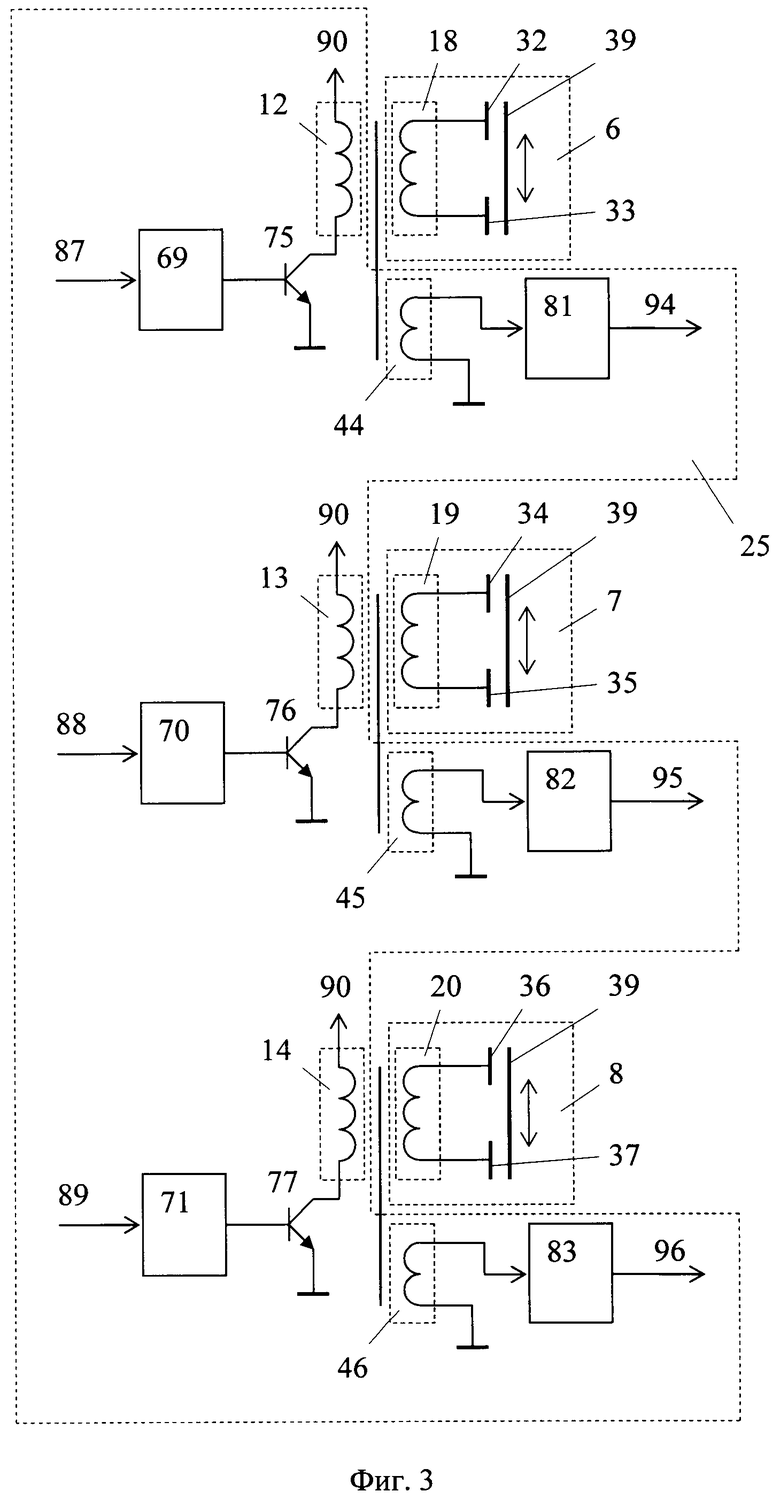
Фиг.4. Вид А на фиг.1 при условно прозрачных крышке, кольце, возбуждающей катушке индуктивности с каркасом, диске и инерционном теле (проводники инерционного тела находятся над проводниками статора).
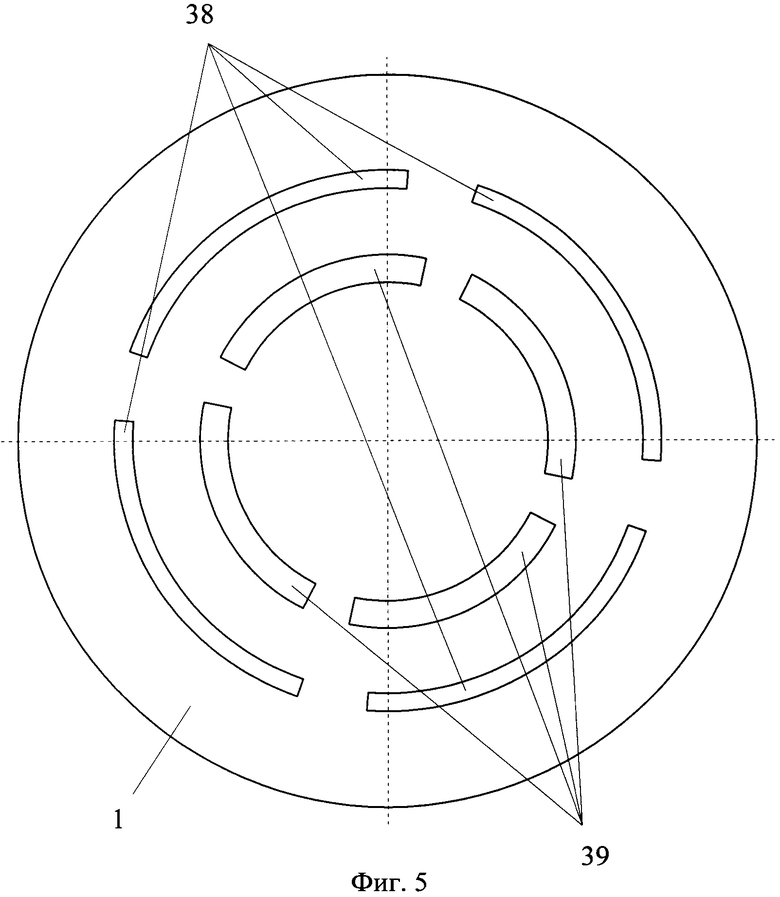
Фиг.5. Вид инерционного тела со стороны, обращенной к диску.
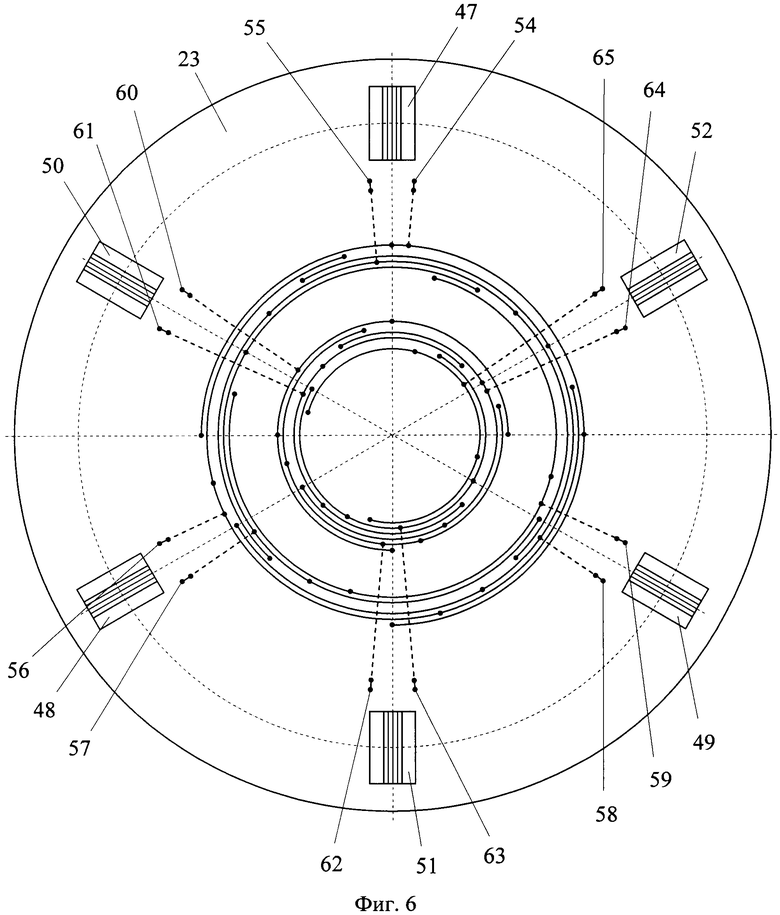
Фиг.6. Вид статора с внешней стороны.
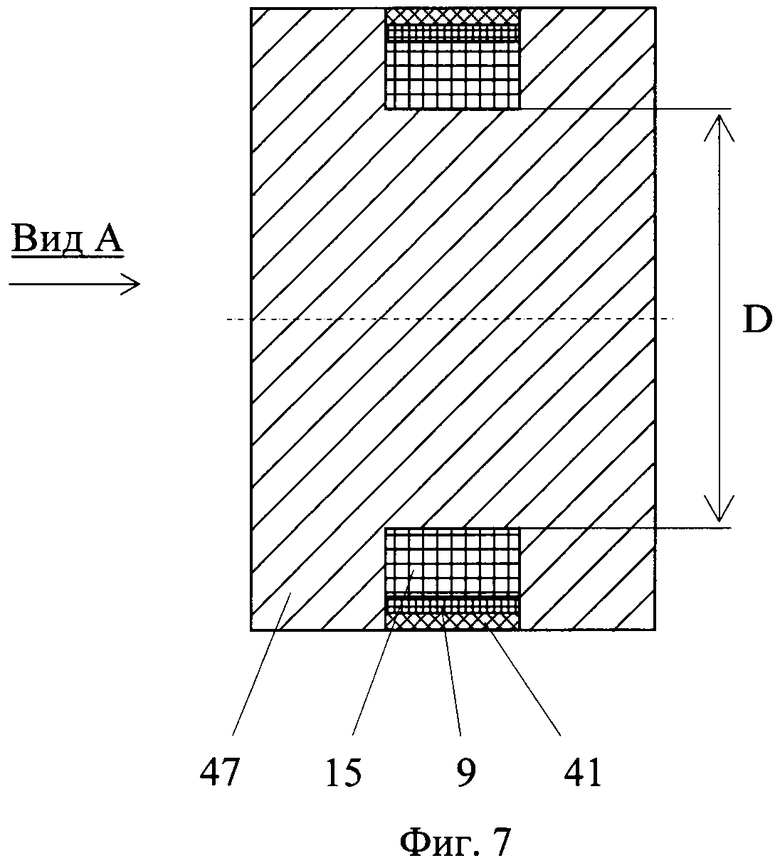
Фиг.7. Первый диэлектрический каркас с катушками индуктивности, продольный разрез.
Фиг.8. Вид А на фиг.7.
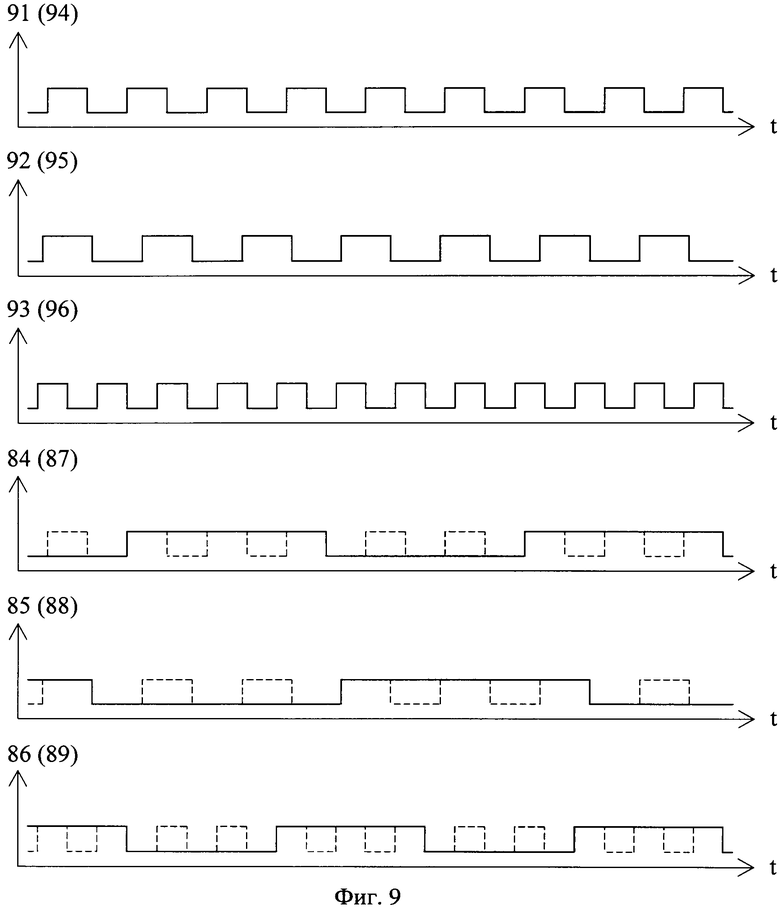
Фиг.9. Диаграммы состояний логических сигналов на входах шести элементов ИЛИ относительно логических сигналов на соответствующих выходах шести компараторов (частот резонансных колебаний шести колебательных контуров).
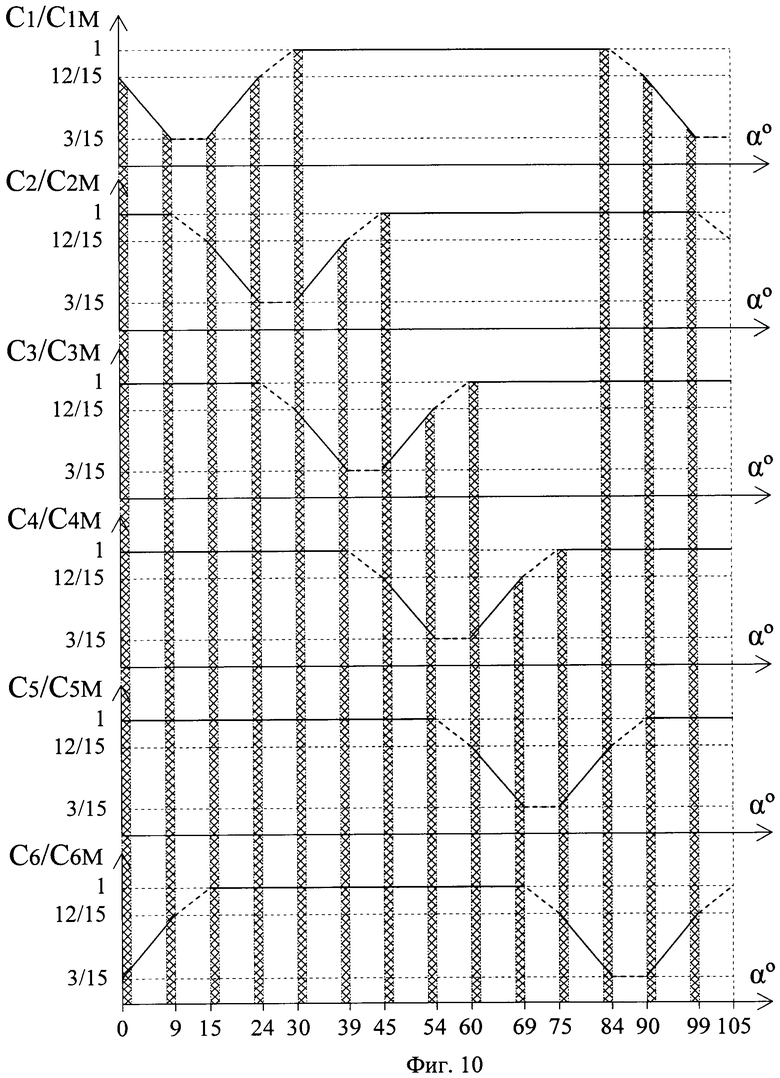
Фиг.10. Диаграммы состояний емкостей между секциями электродов первого, второго и третьего колебательных контуров при вращении инерционного тела относительно статора.
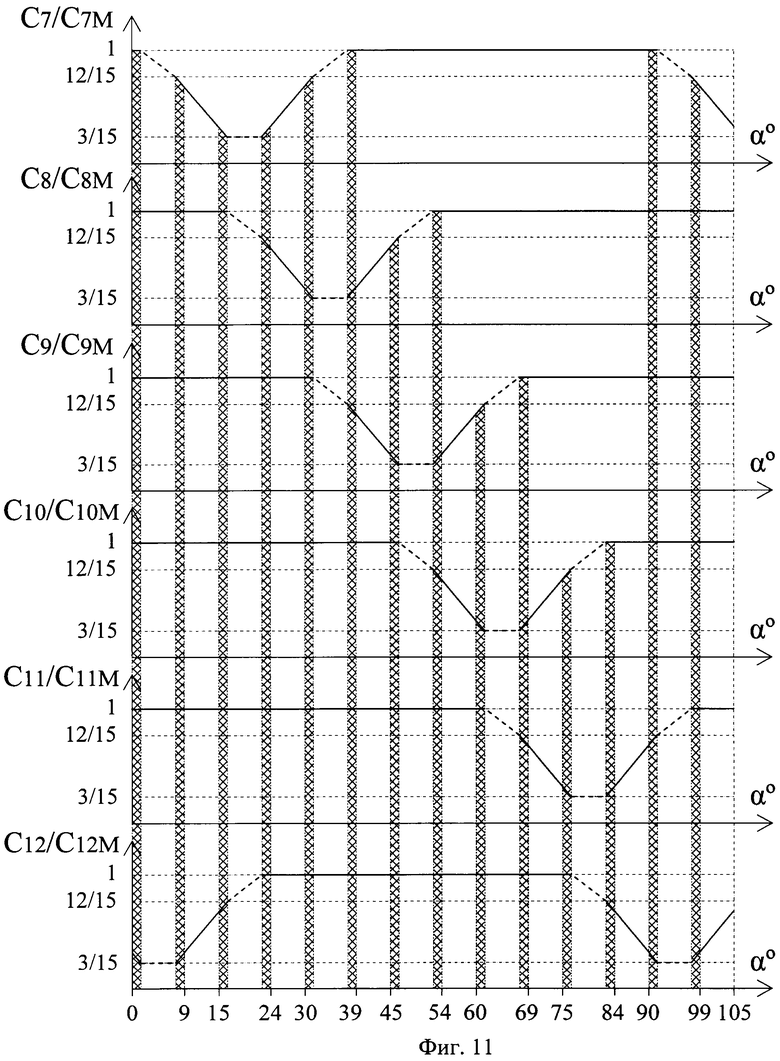
Фиг.11. Диаграммы состояний емкостей между секциями электродов четвертого, пятого и шестого колебательных контуров при вращении инерционного тела относительно статора.
Осуществление изобретения
Устройство, осуществляющее техническую реализацию предлагаемого способа, содержит два датчика угловой скорости, которые имеют одинаковую конструкцию.
Датчик угловой скорости содержит инерционное тело 1, выполненное в виде диска (см. фиг.1), диск 21, кольцо 22, статор 23 и крышку 24, выполненные в виде двух дисков, а также измерительную схему 25 (см. фиг.2, 3).
Предпочтительно статор 23, диск 21, кольцо 22 и крышку 24 выполняют из стекла, например, электровакуумного стекла (низкая газопроницаемость для аргона (практически газонепроницаемо для аргона)), или стеклокерамики (ситалла или фотоситалла, низкая газопроницаемость для газов). При выполнении указанных деталей из стекла отсутствует операция кристаллизации, что повышает технологичность изготовления.
Инерционное тело 1 выполнено из магнитострикционного материала, например, магнитострикционного керамического феррита (пьезомагнитной керамики), интерметаллических соединений редкая земля - переходный металл или магнитодиэлектрика (частицы мелкодисперсного ферромагнитного материала изолированы электровакуумным стеклом или стеклокерамикой).
Статор 23, диск 21, кольцо 22 и крышка 24 выполняют функцию корпуса. Диск 21 установлен на статор 23. Кольцо 22 установлено между диском 21 и крышкой 24.
Места диффузионных соединений между указанными деталями корпуса обозначены на фиг.1 линиями двойной (повышенной) толщины.
Диффузионная сварка обеспечивает соединение указанных деталей корпуса практически без изменения их формы (микропластическая деформация в зоне диффузионной сварки между соединяемыми деталями может составить 2 мкм и менее), а также стабильность рабочих зазоров между инерционным телом 1 и корпусом, которые могут составить 1 мкм и более (см. фиг.1).
На первом этапе в сварочной установке выполняют диффузионную сварку стекол (предпочтительно электровакуумных стекол) или исходных стекол статора 23 и диска 21 (исходные стекла на первом этапе не кристаллизуют). Затем первоначальную (повышенную) толщину диска 21 уменьшают путем шлифования до толщины от 10 мкм (предпочтительно (минимальные радиальные размеры инерционного тела 1)) и до 30 мкм.
В дальнейшем производят диффузионную сварку стекол или исходных стекол деталей корпуса (сжимающую нагрузку на соединяемые детали корпуса подают при переходе стекол или исходных стекол из хрупкой области в пластическую).
Соединенные с помощью диффузионной сварки исходные стекла затем кристаллизуют (получение стеклокерамики) в несколько этапов путем постепенного повышения температуры внутри сварочной установки с целью исключения деформации деталей корпуса (сваренных исходных стекол). При этом перед диффузионной сваркой корпуса может быть проведено ультрафиолетовое облучение по всей поверхности всех деталей корпуса, выполненных из светочувствительных исходных стекол (получение фотоситалла).
Диффузионную сварку стекол или исходных стекол (получение стеклокерамики) производят внутри сварочной установки в среде аргона при повышенном его давлении, которое может составить от 1 МПа и до 10 МПа, и более (предпочтительно).
После диффузионной сварки стекол или исходных стекол деталей корпуса, а также кристаллизации корпуса должны сохраняться форма диска инерционного тела 1 и его магнитострикционные свойства (магнитострикция).
Температурные коэффициенты расширения инерционного тела 1 из магнитострикционного материала и корпуса из стекла или стеклокерамики согласуют между собой.
Корпус жестко закреплен на контролируемом объекте (на фиг.1 не показан).
Выполнение корпуса датчика угловой скорости из стекла или стеклокерамики и соединение деталей корпуса с помощью диффузионной сварки (нет отдельных соединительных слоев между деталями корпуса) снижает газопроницаемость корпуса, что повышает точность измерения
Первый 3, второй 4, третий 5, четвертый 6, пятый 7 и шестой 8 колебательные контуры гальванически развязаны от измерительной схемы 25 и содержат соответственно катушку индуктивности 15 первого 3 колебательного контура, катушку индуктивности 16 второго 4 колебательного контура, катушку индуктивности 17 третьего 5 колебательного контура, катушку индуктивности 18 четвертого 6 колебательного контура, катушку индуктивности 19 пятого 7 колебательного контура и катушку индуктивности 20 шестого 8 колебательного контура.
Секции первого 26 и второго 27 электродов первого 3 колебательного контура (см. фиг.4), секции первого 28 и второго 29 электродов второго 4 колебательного контура, а также секции первого 30 и второго 31 электродов третьего 5 колебательного контура расположены и равномерно распределены по окружности на стороне статора 23, обращенной к диску 21.
Секции первого 32 и второго 33 электродов четвертого 6 колебательного контура, секции первого 34 и второго 35 электродов пятого 7 колебательного контура, а также секции первого 36 и второго 37 электродов шестого 8 колебательного контура расположены и равномерно распределены по окружности меньшего диаметра на стороне статора 23, обращенной к диску 21.
Первый и второй выводы катушки индуктивности 15 первого 3 колебательного контура подключены соответственно к секциям первого 26 и второго 27 электродов первого 3 колебательного контура, первый и второй выводы катушки индуктивности 16 второго 4 колебательного контура подключены соответственно к секциям первого 28 и второго 29 электродов второго 4 колебательного контура, первый и второй выводы катушки индуктивности 17 третьего 5 колебательного контура подключены соответственно к секциям первого 30 и второго 31 электродов третьего 5 колебательного контура, первый и второй выводы катушки индуктивности 18 четвертого 6 колебательного контура подключены соответственно к секциям первого 32 и второго 33 электродов четвертого 6 колебательного контура, первый и второй выводы катушки индуктивности 19 пятого 7 колебательного контура подключены соответственно к секциям первого 34 и второго 35 электродов пятого 7 колебательного контура, а также первый и второй выводы катушки индуктивности 20 шестого 8 колебательного контура подключены соответственно к секциям первого 36 и второго 37 электродов шестого 8 колебательного контура.
Секции общего электрода 38 первого 3. второго 4 и третьего 5 колебательных контуров расположены и равномерно распределены по окружности на стороне инерционного тела 1, обращенной к диску 21 (см. фиг.4, 5), над секциями шести электродов первого 3, второго 4 и третьего 5 колебательных контуров, расположенных и равномерно распределенных по окружности на стороне статора 23, обращенной к диску 21.
Секции общего электрода 39 четвертого 6, пятого 7 и шестого 8 колебательных контуров расположены и равномерно распределены по окружности меньшего диаметра на стороне инерционного тела 1, обращенной к диску 21, над секциями шести электродов четвертого 6, пятого 7 и шестого 8 колебательных контуров, расположенных и равномерно распределенных по окружности меньшего диаметра на стороне статора 23, обращенной к диску 21.
При равномерном распределении секций каждого электрода шести колебательных контуров по соответствующим окружностям на сторонах инерционного тела 1 и статора 23, обращенных к диску 21 (обращенных друг к другу), происходит, уменьшение влияния на результат измерения угловых перемещения, скорости и ускорения контролируемого объекта непараллельности плоскостей инерционного тела 1 и статора 23, несоосности (смещение осей) инерционного тела 1 и статора 23 друг относительно друга, а также изменений геометрических размеров секций двух общих электродов шести колебательных контуров при продольных и радиальных механических колебаниях диска инерционного тела 1.
При этом анизотропия магнитострикции магнитострикционного материала (например, интерметаллических соединений редкая земля -переходный металл) инерционного тела 1 не оказывает практического влияния на результат измерения.
Секция выполнена в виде металлической пластины, которая ограничена внешней окружностью, внутренней окружностью и двумя радиусами.
Каждая указанная секция занимает угловой сектор, равный 15° минус угловой сектор, который занимает промежуток между двумя соседними секциями, расположенными рядом по окружности (каждый промежуток между двумя соседними секциями имеет одинаковую и малую угловую ширину).
Каждая секция двух общих электродов шести колебательных контуров, расположенная на стороне инерционного тела 1, обращенной к диску 21, занимает угловой сектор равный 75°. Секции общего электрода 38 первого 3, второго 4 и третьего 5 колебательных контуров сдвинуты по окружности относительно секций общего электрода 39 четвертого 6, пятого 7 и шестого 8 колебательных контуров на угол равный 7,5°.
Количество секций в каждом из электродов шести колебательных контуров может быть равно четырем или восьми.
В общем случае количество секций в каждом из электродов шести колебательных контуров может быть четным или кратным четырем (предпочтительно).
Секции каждого электрода шести колебательных контуров, расположенные на стороне статора 23, обращенной к диску 21, объединены между собой с помощью межсекционных электрических соединений в виде концентрических и радиальных металлических проводников с контактными площадками, например, из молибдена, а также металлизированных отверстий или впаянных (предпочтительно) в статор 23 проволок диаметром 0,05 мм, например, из молибдена (см. фиг.4 и фиг.6). При этом образуются вакуумно-плотные термически согласованные электрические вводы в виде проволок в статоре 23.
Диск 21 предназначен для снижения газопроницаемости статора 23, которая может происходить в местах расположения металлизированных отверстий или впаянных в статор 23 проволок, например, при циклическом изменении температуры внешней среды.
На фиг.4 для наглядности изображения обозначена только одна из четырех секций каждого электрода шести колебательных контуров.
Внутреннее пространство корпуса заполнено газообразной средой 2, например, аргоном (предпочтительно). Инерционное тело 1 установлено с возможностью перемещения в газообразную среду 2 между диском 21 и крышкой 24. Функцию аэродинамического подвеса инерционного тела 1 внутри корпуса выполняет газообразная среда 2.
Для аэродинамического взвешивания инерционного тела 1 внутри корпуса при малой амплитуде механических колебаний инерционного тела 1 необходимы минимальный объем и повышенное давление газообразной среды 2 внутри корпуса. При повышении давления газообразной среды 2 внутри корпуса (жесткости аэродинамического подвеса инерционного тела 1) возможно увеличение рабочих зазоров между инерционным телом 1 и корпусом (см. фиг.1), что повышает технологичность изготовления.
При этом зазоры между обращенными друг к другу поверхностями кольца 22 и инерционного тела 1, инерционного тела 1 и диска 21, а также инерционного тела 1 и крышки 24 могут составить 1 мкм и более (см. фиг.1).
Диффузионная сварка деталей корпуса из стекла или исходного стекла, предназначенного для получения стеклокерамики, позволяет повысить стабильность рабочих зазоров между инерционным телом 1 и корпусом, что повышает технологичность изготовления.
Корпус может быть выполнен из оптически прозрачного электровакуумного стекла или ситалла. Вследствие этого возможен визуальный контроль аэродинамического взвешивания инерционного тела 1 в газообразной среде 2 внутри корпуса при настройке устройства, осуществляющего техническую реализацию предлагаемого способа.
Возбуждающая катушка индуктивности 40 выполнена намоткой проводом на диэлектрическом каркасе, установлена над инерционным телом 1 и подключена к генератору переменного напряжения ультразвуковой частоты (не показан) измерительной схемы 25.
Возможно возбуждение механических колебаний в инерционном теле 1 на частоте переменного магнитного поля возбуждающей катушки индуктивности 40 (предпочтительно) или на двойной частоте переменного магнитного поля возбуждающей катушки индуктивности 40 и высших четных гармониках.
В первом случае магнитное состояние инерционного тела 1 определяется одновременным воздействием на него постоянной магнитной индукции и переменной (изменяющейся по синусоидальному закону) индукции. При этом переменное напряжение генератора измерительной схемы 25 имеет постоянную (подмагничивающую) составляющую (постоянное смещение относительно вывода «общий» питания).
Во втором случае магнитное состояние инерционного тела 1 определяется воздействием на него переменной (изменяющейся по синусоидальному закону) индукции. При отсутствии подмагничивания (постоянная магнитная индукция равна нулю) механические колебания в инерционном теле 1 на частоте переменной индукции (переменного магнитного поля возбуждающей катушки индуктивности 40) вообще отсутствуют, то есть в инерционного тела 1 возникают только механические колебания на двойной частоте и высших четных гармониках.
На Фиг.4 показано начальное взаимное положение инерционного тела 1 относительно статора 23, соответствующее нулю угловых градусов (стрелкой показано направление вращения инерционного тела 1 относительно статора 23 (корпуса)).
Измерительная схема 25 содержит катушку индуктивности 9 подкачки энергии в первый 3 колебательный контур, катушку индуктивности 10 подкачки энергии во второй 4 колебательный контур, катушку индуктивности 11 подкачки энергии в третий 5 колебательный контур, катушку индуктивности 12 подкачки энергии в четвертый 6 колебательный контур, катушку индуктивности 13 подкачки энергии в пятый 7 колебательный контур, катушку индуктивности 14 подкачки энергии в шестой 8 колебательный контур, катушку индуктивности 41 считывания частоты резонансных колебаний первого 3 колебательного контура, катушку индуктивности 42 считывания частоты резонансных колебаний второго 4 колебательного контура, катушку индуктивности 43 считывания частоты резонансных колебаний третьего 5 колебательного контура, катушку индуктивности 44 считывания частоты резонансных колебаний четвертого 6 колебательного контура, катушку индуктивности 45 считывания частоты резонансных колебаний пятого 7 колебательного контура и катушку индуктивности 46 считывания частоты резонансных колебаний шестого 8 колебательного контура.
Шесть катушек индуктивности шести колебательных контуров, шесть катушек индуктивности подкачки энергии в шесть колебательных контуров и шесть катушек индуктивности считывания частоты резонансных колебаний шести колебательных контуров выполнены намоткой проводом одинаковым образом на первом 47, втором 48, третьем 49, четвертом 50, пятом 51 и шестом 52 диэлектрических каркасах, которые размещены по окружности на внешней стороне 53 статора 23 с помощью стеклоспаев или клеевых соединений. При этом оси всех катушек индуктивности направлены по касательной к окружности, проходящей через центры шести диэлектрических каркасов (предпочтительно).
В общем случае каждый из шести диэлектрических каркасов с катушками индуктивности может быть повернут на 90° относительно своего положения, изображенного на фиг.6 (вращение каждого из шести диэлектрических каркасов с катушками индуктивности происходит в плоскости чертежа, изображенного на фиг.6).
На фиг.7 и фиг.8 изображен первый 47 диэлектрический каркас с намотанными на нем катушкой индуктивности 15 первого 3 колебательного контура, катушкой индуктивности 9 подкачки энергии в первый 3 колебательный контур и катушкой индуктивности 41 считывания частоты резонансных колебаний первого 3 колебательного контура. На фиг.1 шесть диэлектрических каркасов с катушками индуктивности, размещенные на внешней стороне 53 статора 23, не показаны.
Первый и второй выводы катушки индуктивности 15 первого 3 колебательного контура, первый и второй выводы катушки индуктивности 16 второго 4 колебательного контура, первый и второй выводы катушки индуктивности 17 третьего 5 колебательного контура, первый и второй выводы катушки индуктивности 18 четвертого 6 колебательного контура, первый и второй выводы катушки индуктивности 19 пятого 7 колебательного контура, а также первый и второй выводы катушки индуктивности 20 шестого 8 колебательного контура припаивают соответственно к первой 54, второй 55, третьей 56, четвертой 57, пятой 58, шестой 59, седьмой 60, восьмой 61, девятой 62, десятой 63, одиннадцатой 64 и двенадцатой 65 контактным площадкам.
На фиг.6 электрические соединения (проводники), выполненные навесным монтажом, обозначены пунктирными линиями.
Измерительная схема 25 дополнительно включает первый 66, второй 67, третий 68, четвертый 69, пятый 70 и шестой 71 элементы ИЛИ (каждый указанный элемент ИЛИ имеет один вход и выполняет функцию логического повторителя), первый 72, второй 73, третий 74, четвертый 75, пятый 76 и шестой 77 транзисторы, первый 78, второй 79 третий 80, четвертый 81, пятый 82 и шестой 83 компараторы, а также вычислительное устройство (на фиг.2, 3 не показано).
Вход 84 первого 66 элемента ИЛИ, вход 85 второго 67 элемента ИЛИ, вход 86 третьего 68 элемента ИЛИ, вход 87 четвертого 69 элемента ИЛИ, вход 88 пятого 70 элемента ИЛИ и вход 89 шестого 71 элемента ИЛИ являются входами запуска и поддержания резонансных колебаний электромагнитного поля соответственно в первом 3, втором 4, третьем 5, четвертом 6, пятом 7 и шестом 8 колебательных контурах. Первые выводы шести катушек индуктивности подкачки энергии в шесть колебательных контуров соединены с плюсовым выводом 90 питания.
Второй вывод катушки индуктивности 9 подкачки энергии в первый 3 колебательный контур, второй вывод катушки индуктивности 10 подкачки энергии во второй 4 колебательный контур, второй вывод катушки индуктивности 11 подкачки энергии в третий 5 колебательный контур, второй вывод катушки индуктивности 12 подкачки энергии в четвертый 6 колебательный контур, второй вывод катушки индуктивности 13 подкачки энергии в пятый 7 колебательный контур и второй вывод катушки индуктивности 14 подкачки энергии в шестой 8 колебательный контур соединены соответственно с коллекторами первого 72, второго 73, третьего 74, четвертого 75, пятого 76 и шестого 77 транзисторов.
Первый вывод катушки индуктивности 41 считывания частоты резонансных колебаний первого 3 колебательного контура, первый вывод катушки индуктивности 42 считывания частоты резонансных колебаний второго 4 колебательного контура, первый вывод катушки индуктивности 43 считывания частоты резонансных колебаний третьего 5 колебательного контура, первый вывод катушки индуктивности 44 считывания частоты резонансных колебаний четвертого 6 колебательного контура, первый вывод катушки индуктивности 45 считывания частоты резонансных колебаний пятого 7 колебательного контура и первый вывод катушки индуктивности 46 считывания частоты резонансных колебаний шестого 8 колебательного контура соединены соответственно с прямыми входами первого 78, второго 79, третьего 80, четвертого 81, пятого 82 и шестого 83 компараторов, на инверсные входы которых (на фиг.2 и фиг.3 не показаны) подают опорное напряжение.
Вторые выводы шести катушек индуктивности считывания частоты резонансных колебаний шести колебательных контуров соединены с выводом «общий» питания. Выходы первого 66, второго 67, третьего 68, четвертого 69, пятого 70 и шестого 71 элементов ИЛИ соединены соответственно с базами первого 72, второго 73, третьего 74, четвертого 75, пятого 76 и шестого 77 транзисторов, эмиттеры которых соединены с выводом «общий» питания. Выходы 91, 92, 93, 94, 95 и 96 соответственно первого 78, второго 79, третьего 80, четвертого 81, пятого 82 и шестого 83 компараторов соединены с вычислительным устройством измерительной схемы 25.
На фиг.9 изображены диаграммы состояний логических сигналов на указанных выходах и диаграммы состояний логических сигналов на шести входах шести элементов ИЛИ относительно логических сигналов на указанных выходах, которые обозначены пунктирными линиями. При этом увеличение или уменьшение токов, протекающих через три катушки индуктивности подкачки энергии в первый 3, второй 4 и третий 5 (или четвертый 6, пятый 7 и шестой 8) колебательные контуры происходит через десять полупериодов резонансных колебаний электромагнитного поля первого 3, второго 4 и третьего 5 (или четвертого 6, пятого 7 и шестого 8) колебательных контуров.
Для того, чтобы уменьшить влияние краевого эффекта на результат измерения необходимо, чтобы край рабочей секции, размещенной на инерционном теле 1, не подходил к краю рабочей секции, размещенной на статоре 23, на расстояние ближе чем 10·h (см. фиг.4), где h - осевое расстояние между инерционным телом 1 и статором 23.
При этом зона краевого эффекта отстоит от середины промежутка между двумя соседними секциями, расположенными рядом по окружности на стороне статора 23, обращенной к диску 21 (инерционному телу 1), на угол равный 3°. Пунктирными линиями на фиг.10 и фиг.11 обозначены зоны краевого эффекта при измерении углового перемещения (α°).
При равенстве емкостей, индуктивностей и электрических сопротивлений первого 3, второго 4 и третьего 5 (или четвертого 6, пятого 7 и шестого 8) колебательных контуров минимальные частоты резонансных колебаний указанных колебательных контуров будут равны между собой при вращении инерционного тела 1 относительно статора 23 (указанный режим работы может быть использован при настройке устройства, осуществляющее техническую реализацию предлагаемого способа).
В случае необходимости, выравнивание постоянных составляющих емкостей указанных колебательных контуров может быть произведено путем изменения ширины соответствующих соединительных проводников.
Устройство, осуществляющее техническую реализацию предлагаемого способа, содержит два датчика угловой скорости, крышки которых соединены между собой с помощью клеевого соединения.
Корпус устройства, осуществляющего техническую реализацию предлагаемого способа, состоит из двух корпусов двух датчиков угловой скорости.
При этом давление газообразной среды внутри корпуса первого датчика угловой скорости отличается от давления газообразной среды внутри корпуса второго датчика угловой скорости.
При построении диаграмм (см. фиг.10 и фиг.11) малую угловую ширину промежутка между двумя соседними секциями, расположенными рядом по окружности на стороне статора 23, обращенной к диску 21 (инерционному телу 1), не учитываем.
Датчик угловой скорости и его элементы конструкции могут иметь следующие технические характеристики и параметры:
Конкретный пример осуществления изобретения иллюстрируется при описании работы устройства, осуществляющего техническую реализацию предлагаемого способа.
Первый и второй датчики угловой скорости работают одинаковым образом.
Первый или второй датчик угловой скорости (в дальнейшем датчик угловой скорости) работает следующим образом.
После включения питания от генератора переменного напряжения ультразвуковой частоты измерительной схемы 25 на возбуждающую катушку индуктивности 40 подают переменное напряжение или напряжение, которое состоит из постоянной (подмагничивающей) и переменной составляющих.
Вследствие этого в инерционном теле 1 возбуждают механические колебания ультразвуковой частоты в диапазоне от 20 кГц и до 50 кГц под действием приложенного к нему переменного магнитного поля. При этом в инерционном теле 1 изменяются продольные (параллельные оси инерционного тела 1) и радиальные размеры инерционного тела 1.
В общем случае возможны линейная (изменение размеров инерционного тела 1 при постоянном его объеме) или объемная магнитострикции инерционного тела 1.
Газообразная, например, инертный газ (предпочтительно аргон), среда 2, находится в зазорах между инерционным телом 1 и корпусом, и выполняет функцию аэродинамического подвеса (газовой «подушки») инерционного тела 1 внутри корпуса. При возбуждении механических колебаний в инерционном теле 1 происходит аэродинамическое взвешивание инерционного тела 1 в газообразной среде 2 внутри корпуса.
При уменьшении одного из указанных зазоров жесткость аэродинамического подвеса инерционного тела 1 в этом месте, повышается. Вследствие этого инерционное тело 1 устанавливается в газообразной среде 2 внутри корпуса практически в центральное положение, которое изображено на фиг.1.
Газообразная среда 2 демпфирует вибрационные и ударные нагрузки на инерционное тело 1, что существенно повышает вибрационную и ударную прочность инерционного тела 1 внутри корпуса датчика угловой скорости.
Затем из параллельного канала вычислительного устройства измерительной схемы 25 на вход 84 первого 66 элемента ИЛИ, вход 85 второго 67 элемента ИЛИ, вход 86 третьего 68 элемента ИЛИ, вход 87 четвертого 69 элемента ИЛИ, вход 88 пятого 70 элемента ИЛИ и вход 89 шестого 71 элемента ИЛИ подают уровни логического нуля и единичные положительные импульсы (после предварительно поданных уровней логического нуля подают уровни логической единицы, а затем уровни логического нуля). С выходов первого 66, второго 67, третьего 68, четвертого 69, пятого 70 и шестого 71 элементов ИЛИ положительные импульсы поступают соответственно на базы первого 72, второго 73, третьего 74, четвертого 75, пятого 76 и шестого 77 транзисторов и открывают указанные транзисторы.
Вследствие этого в моменты изменения токов в шести катушках индуктивности подкачки энергии в шесть колебательных контуров наводятся ЭДС - электродвижущие силы взаимоиндукции (электродвижущие силы индукции) в шести катушках индуктивности шести колебательных контуров, в которых возникают резонансные колебания электромагнитного поля.
Частоты резонансных колебаний электромагнитного поля шести колебательных контуров измеряют путем снятия информации с шести катушек индуктивности считывания частоты резонансных колебаний шести колебательных контуров. С выходов шести компараторов положительные сигналы прямоугольной формы поступают в вычислительное устройство измерительной схемы 25.
В дальнейшем с целью уменьшения влияния шести колебательных контуров друг на друга (электромагнитной совместимости шести колебательных контуров между собой) логические сигналы (импульсы) подают на шесть входов шести элементов ИЛИ из параллельного канала измерительной схемы 25 в соответствии с диаграммами, изображенными на фиг.9. На указанных диаграммах частота логических импульсов, поступающих на каждый из шести входов шести элементов ИЛИ, снижается относительно частоты резонансных колебаний электромагнитного поля соответствующего колебательного контура.
При этом происходит уменьшение амплитуд ЭДС взаимоиндукции (наведенных напряжений) в остальных пяти колебательных контурах от импульсов тока, протекающих через катушку индуктивности подкачки энергии соответствующего колебательного контура, а следовательно и повышение электромагнитной совместимости шести колебательных контуров между собой.
Вследствие этого возможно уменьшение габаритных (радиальных) размеров устройства, осуществляющего техническую реализацию предлагаемого способа измерения параметров углового движения контролируемых объектов, за счет уменьшения радиуса окружности, проходящей через центры всех катушек индуктивности, размещенных на шести диэлектрических каркасах.
Напряжение на плюсовом 90 выводе питания измерительной схемы 25 (амплитуду резонансных колебаний электромагнитного поля каждого из шести колебательных контуров) выбирают минимальным, которое может составить 0,05 В.
При этом в датчике угловой скорости отсутствуют экраны из проводникового материала, которые расположены вблизи (на малом расстоянии) и прикрывают каждую из шести катушек индуктивности шести колебательных контуров. Вследствие этого практически отсутствует изменение индуктивности каждой из шести катушек индуктивности шести колебательных контуров, связанное с изменением частоты резонансных колебаний электромагнитного поля соответствующего колебательного контура (скин-эффектом), что повышает точность измерения.
С выходов шести элементов ИЛИ прямоугольные импульсы поступают на базы соответствующих шести транзисторов. При открывании указанных транзисторов через шесть катушек индуктивности подкачки энергии в шесть колебательных контуров протекают токи, при изменении которых в соответствующих шести колебательных контурах возникают ЭДС взаимоиндукции (ЭДС индукции).
При этом в положительные полупериоды колебаний подкачка энергии в шесть колебательных контуров происходит во время увеличения тока в соответствующих шести катушках индуктивности подкачки энергии в шесть колебательных контуров, а в отрицательные полупериоды колебаний шести колебательных контуров подкачка энергии происходит во время уменьшения тока.
Так как передача энергии в шесть колебательных контуров происходит в моменты изменения токов в соответствующих шести катушках индуктивности подкачки энергии в шесть колебательных контуров (под действием ЭДС взаимоиндукции наводятся токи согласные с направлением токов в каждом из шести колебательных контуров).
Таким образом, в шести колебательных контурах возбуждают непрерывные незатухающие резонансные колебания электромагнитного поля с подкачкой энергии в определенные моменты, времени, увеличивают в эти моменты амплитуды токов, напряжений резонансных колебаний электромагнитного поля и определяют частоту резонансных колебаний электромагнитного поля шести колебательных контуров.
На фиг.10 и фиг.11 двойной штриховкой показаны зоны перекрытия диапазонов измерения первого 3, второго 4, третьего 5 и четвертого 6, пятого 7, шестого 8 колебательных контуров. Внутри зоны перекрытия диапазонов измерения, ширина которой составляет 1,5°, происходит переключение (передача измерения углового перемещения) от первого 3, второго 4 и третьего 5 колебательных контуров к четвертому 6, пятому 7 и шестому 8 колебательным контурам, и наоборот.
Известно, что собственную частоту колебаний колебательного контура (см. кн. Савельев И.В. Курс общей физики, т.1, т.2. - М.: Наука, 1978, в описании указанная книга обозначена как литература [2]) определяют по формуле

где ω0 - собственная частота колебаний колебательного контура (круговая или циклическая частота);
L - индуктивность колебательного контура;
С - емкость колебательного контура.
Период колебаний колебательного контура равен

где π=3,14…
где f - частота колебаний.
С учетом активного (электрического) сопротивления частоту резонансных колебаний реального колебательного контура определяют по формуле

где ω - частота колебаний реального колебательного контура (круговая или циклическая частота);
R - активное (электрическое) сопротивление колебательного контура.
При 1/(L·С) намного больше R2/(2·L)2, то есть при высокой добротности колебательного контура можно положить

Период колебаний колебательного контура по формуле Томсона равен

В дальнейшем периоды колебаний первого 3, второго 4, третьего 5, четвертого 6, пятого 7 и шестого 8 колебательных контуров будем определять по формуле Томсона.
Период колебаний первого 3 колебательного контура равен

где L1 - индуктивность первого 3 колебательного контура;
C01 - постоянная составляющая емкости первого 3 колебательного контура;
C1 - суммарная емкость между секциями первого 26 электрода первого 3 колебательного контура и секциями общего электрода 38 первого 3, второго 4 и третьего 5 колебательных контуров;
С4 - суммарная емкость между секциями второго 27 электрода первого 3 колебательного контура и секциями общего электрода 38 первого 3, второго 4 и третьего 5 колебательных контуров.
Период колебаний второго 4 колебательного контура равен

где L2 - индуктивность второго 4 колебательного контура;
С02 - постоянная составляющая емкости второго 4 колебательного контура;
С2 - суммарная емкость между секциями первого 28 электрода второго 4 колебательного контура и секциями общего электрода 38 первого 3, второго 4 и третьего 5 колебательных контуров;
С5 - суммарная емкость между секциями второго 29 электрода второго 4 колебательного контура и секциями общего электрода 38 первого 3, второго 4 и третьего 5 колебательных контуров.
Период колебаний третьего 5 колебательного контура равен

где L3 - индуктивность третьего 5 колебательного контура;
С03 - постоянная составляющая емкости третьего 5 колебательного контура;
С3 - суммарная емкость между секциями первого 30 электрода третьего 5 колебательного контура и секциями общего электрода 38 первого 3, второго 4 и третьего 5 колебательных контуров;
С6 - суммарная емкость между секциями второго 31 электрода третьего 5 колебательного контура и секциями общего электрода 38 первого 3, второго 4 и третьего 5 колебательных контуров.
Первый 3, второй 4 и третий 5 колебательные контуры выполнены таким образом, что постоянные составляющие емкостей и индуктивности указанных колебательных контуров практически равны между собой


При угловом перемещении инерционного тела 1, относительно статора 23, выполняются следующие равенства

где C1M - максимальная суммарная емкость между секциями первого 26 электрода первого 3 колебательного контура и секциями общего электрода 38 первого 3, второго 4 и третьего 5 колебательных контуров;
C2M - максимальная суммарная емкость между секциями первого 28. электрода второго 4 колебательного контура и секциями общего электрода 38 первого 3, второго 4 и третьего 5 колебательных контуров;
C3M - максимальная суммарная емкость между секциями первого 30 электрода третьего 5 колебательного контура и секциями общего электрода 38 первого 3, второго 4 и третьего 5 колебательных контуров;
C4M - максимальная суммарная емкость между секциями второго 27 электрода первого 3 колебательного контура и секциями общего электрода 38 первого 3, второго 4 и третьего 5 колебательных контуров;
C5M - максимальная суммарная емкость между секциями второго 29 электрода второго 4 колебательного контура и секциями общего электрода 38 первого 3, второго 4 и третьего 5 колебательных контуров;
C6M - максимальная суммарная емкость между секциями второго 31 электрода третьего 5 колебательного контура и секциями общего электрода 38 первого 3, второго 4 и третьего 5 колебательных контуров.
Период колебаний четвертого 6 колебательного контура равен

где L4 - индуктивность четвертого 6 колебательного контура;
С04 - постоянная составляющая емкости четвертого 6 колебательного контура;
C7 - суммарная емкость между секциями первого 32 электрода четвертого 6 колебательного контура и секциями общего электрода 39 четвертого 6, пятого 7 и шестого 8 колебательных контуров;
С10 - суммарная емкость между секциями второго 33 электрода четвертого 6 колебательного контура и секциями общего электрода 39 четвертого 6, пятого 7 и шестого 8 колебательных контуров.
Период колебаний пятого 7 колебательного контура равен

где L5 - индуктивность пятого 7 колебательного контура;
C05 - постоянная составляющая емкости пятого 7 колебательного контура;
C8 - суммарная емкость между секциями первого 34 электрода пятого 7 колебательного контура и секциями общего электрода 39 четвертого 6, пятого 7 и шестого 8 колебательных контуров;
С11 - суммарная емкость между секциями второго 35 электрода пятого 7 колебательного контура и секциями общего электрода 39 четвертого 6, пятого 7 и шестого 8 колебательных контуров.
Период колебаний шестого 8 колебательного контура равен

где L6 - индуктивность шестого 8 колебательного контура;
С06 - постоянная составляющая емкости шестого 8 колебательного контура;
С9 - суммарная емкость между секциями первого 36 электрода шестого 8 колебательного контура и секциями общего электрода 39 четвертого 6, пятого 7 и шестого 8 колебательных контуров;
C12 - суммарная емкость между секциями второго 37 электрода шестого 8 колебательного контура и секциями общего электрода 39 четвертого 6 пятого 7 и шестого 8 колебательных контуров.
Четвертый 6, пятый 7 и шестой 8 колебательные контуры выполнены таким образом, что постоянные составляющие емкостей и индуктивности указанных колебательных контуров практически равны между собой


При угловом перемещении инерционного тела 1, относительно статора 23, выполняются следующие равенства;

где C7M - максимальная суммарная емкость между секциями первого 32 электрода четвертого 6 колебательного контура и секциями общего электрода 39 четвертого 6, пятого 7 и шестого 8 колебательных контуров;
C8M - максимальная суммарная емкость между секциями первого 34 электрода пятого 7 колебательного контура и секциями общего электрода 39 четвертого 6, пятого 7 и шестого 8 колебательных контуров;
C9M - максимальная суммарная емкость между секциями первого 36 электрода шестого 8 колебательного контура и секциями общего электрода 39 четвертого 6, пятого 7 и шестого 8 колебательных контуров;
C10M - максимальная суммарная емкость между секциями второго 33 электрода четвертого 6 колебательного контура и секциями общего электрода 39 четвертого 6, пятого 7 и шестого 8 колебательных контуров;
C11M - максимальная суммарная емкость между секциями второго 35 электрода пятого 7 колебательного контура и секциями общего электрода 39 четвертого 6, пятого 7 и шестого 8 колебательных контуров;
C12M - максимальная суммарная емкость между секциями второго 37 электрода шестого 8 колебательного контура и секциями общего электрода 39 четвертого 6, пятого 7 и шестого 8 колебательных контуров.
Введем следующие обозначения в равенства (10), (11), (12), (16), (17) и (18)






Радиальную ширину секций общего электрода 39 четвертого 6, пятого 7 и шестого 8 колебательных контуров выбирают таким образом, чтобы емкости, входящие в равенства (21) и (24), были близки между собой.
Формулы (7), (8) и (9) с учетом равенств (19), (20) и (21) в зависимости от величины углового перемещения инерционного тела 1 относительно статора 23 (см. фиг.10) можно представить в виде:
В диапазоне измерения от 0° и до 9°



В диапазоне измерения от 15° и до 24°



В диапазоне измерения от 30° и до 39°



Вычислительное устройство измерительной схемы 25, в зависимости от величины углового перемещения инерционного тела 1 относительно статора 23 (см. фиг.10), вычисляет следующие выражения:
В диапазоне измерения от 0° и до 9°

В диапазоне измерения от 15° и до 24°

В диапазоне измерения от 30° и до 39°

Выражения (34), (35) и (36) являются мерой измерения углового перемещения в вышеуказанных диапазонах измерения и однозначно определяют угловое перемещение инерционного тела 1 относительно статора 23. Функциональную зависимость между угловым перемещением инерционного тела 1 относительно статора 23 и выражениями (34), (35) и (36) определяют предварительной градуировкой (калибровкой).
Вычислительное устройство измерительной схемы 25 производит вычисление выражений



через каждые 45 градусов углового перемещения инерционного тела 1 относительно статора 23 в соответствующем диапазоне измерения.
Формулы (13), (14) и (15) с учетом равенств (22), (23) и (24) в зависимости от величины углового перемещения инерционного тела 1 относительно статора 23 (см. фиг.11) можно представить в виде:
В диапазоне измерения от 7,5° и до 16,5°



В диапазоне измерения от 22,5° и до 31,5°



В диапазоне измерения от 37,5° и до 46,5°



Вычислительное устройство измерительной схемы 25, в зависимости от величины углового перемещения инерционного тела 1 относительно статора 23 (см. фиг.11), вычисляет следующие выражения:
В диапазоне измерения от 7,5° и до 16,5°

В диапазоне измерения от 22,5° и до 31,5°

В диапазоне измерения от 37,5° и до 46,5°

Выражения (49), (50) и (51) являются мерой измерения углового перемещения в вышеуказанных диапазонах измерения и однозначно определяют угловое перемещение инерционного тела 1 относительно статора 23 (корпуса). Функциональную зависимость между угловым перемещением инерционного тела 1 относительно статора 23 и выражениями (49), (50) и (51) определяют предварительной градуировкой (калибровкой).
Вычислительное устройство измерительной схемы 25 производит вычисление выражений



через каждые 45 градусов углового перемещения инерционного тела 1 относительно статора 23 в соответствующем диапазоне измерения.
Угловое перемещение (приращение угла поворота) инерционного тела 1 относительно статора 23 является мерой измерения и однозначно определяет угловую скорость контролируемого объекта в заданном временном интервале относительно псевдоинерциальной (инерциальной) системы координат (см. литературу {1}, с.8, 131, 132).
Функциональную зависимость между угловым перемещением (приращением угла поворота) инерционного тела 1 относительно статора 23 (корпуса) и угловой скоростью (однократным интегралом по времени от углового ускорения) контролируемого объекта в заданном временном интервале относительно псевдоинерциальной (инерциальной) системы координат определяют предварительной градуировкой (калибровкой).
При этом угловую скорость контролируемого объекта калибруют с учетом температурного признака - разности угловых скоростей первого и второго датчиков угловой скорости, деленной на угловую скорость первого или второго датчика угловой скорости.
Вследствие этого происходит снижение влияния изменения температуры окружающей среды на результат измерения угловой скорости контролируемого объекта, что повышает точность измерения угловой скорости контролируемого объекта.
Вычислительное устройство измерительной схемы 25 вычисляет угловые перемещение и ускорение контролируемого объекта относительно псевдоинерциальной (инерциальной) системы координат соответственно однократным интегрированием и однократным дифференцированием по времени угловой скорости контролируемого объекта относительно псевдоинерциальной (инерциальной) системы координат.
Таким образом, в устройстве, осуществляющем техническую реализацию предлагаемого способа измерения параметров углового движения контролируемых объектов, происходит уменьшение влияния на результат измерения угловых перемещения, скорости и ускорения контролируемого объекта относительно псевдоинерциальной (инерциальной) системы координат изменений частоты задающего генератора, например, от температуры, вычислительного устройства измерительной схемы 25, температуры внешней среды, осевого расстояния между обращенными друг к другу поверхностями (плоскостями) инерционного тела 1 и статора 23, непараллельности плоскостей и несоосности инерционного тела 1 и статора 23, а также изменений геометрических размеров секций двух общих электродов шести колебательных контуров при продольных и радиальных механических колебаниях инерционного тела 1, что повышает точность измерения.
При этом измерение угловых перемещения, скорости и ускорения контролируемого объекта происходит строго в плоскости и соосно диску статора 23 (нет поперечной чувствительности), что повышает точность измерения.
В предлагаемом способе для измерения параметров углового движения контролируемых объектов полностью отсутствует сухое трение между инерционным телом 1 и корпусом, что также повышает точность измерения.
Например, при температурном расширении проводников первого 3, второго 4 и третьего 5 (или четвертого 6, пятого 7 и шестого 8) колебательных контуров вследствие изменения температуры внешней среды, происходят изменения практически пропорционально постоянных составляющих емкостей и практически пропорционально суммарных емкостей между секциями электродов указанных колебательных контуров.
Вследствие этого происходит уменьшение влияния на результат измерения угловых перемещения, скорости и ускорения контролируемого объекта относительно псевдоинерциальной (инерциальной) системы координат температурного расширения проводников первого 3, второго 4 и третьего 5 (или четвертого 6, пятого 7 и шестого 8) колебательных контуров.
Промышленная применимость
Предлагаемый способ измерения параметров углового движения контролируемых объектов найдет широкое применение в устройствах измерительной техники, специалистам будут очевидны и другие частные случаи автоматизации измерения угловых перемещений, скоростей и ускорений контролируемого объекта. Данное описание и примеры рассматриваются как материал, иллюстрирующий изобретение, сущность которого и объем патентных притязаний определены в нижеследующей формуле изобретения, совокупностью существенных признаков и их эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2516207C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ | 2011 |
|
RU2466411C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2465605C1 |
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2010 |
|
RU2445633C1 |
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2010 |
|
RU2442991C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ | 2011 |
|
RU2490608C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ УСКОРЕНИЙ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ | 2011 |
|
RU2490649C2 |
| ИНКРЕМЕНТНЫЙ ЕМКОСТНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2010 |
|
RU2427794C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ЖИДКОЙ СРЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2561251C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАРУШЕНИЙ ЦЕЛОСТНОСТИ ИЗОЛЯЦИИ ПРОВОДОВ | 2011 |
|
RU2490654C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения угловых перемещений, скоростей и ускорений. Способ заключается в циклическом измерении приращений угла поворота инерционного тела относительно корпуса в заданном временном интервале. При этом используют два инерционных тела, выполненных из магнитострикционного материала, помещенных в две газообразные среды с разными значениями давления. Возбуждают механические колебания в двух инерционных телах ультразвуковой частотой в диапазоне от 20 кГц и до 50 кГц и резонансные колебания электромагнитного поля в двенадцати колебательных контурах, изменяют токи, протекающие через двенадцать катушек индуктивности подкачки энергии в двенадцать колебательных контуров. Наводят электродвижущие силы взаимоиндукции в катушках индуктивности колебательных контуров, под действием которых увеличивают амплитуды резонансных колебаний электромагнитного поля в колебательных контурах, изменяют емкости колебательных контуров. Приращения углов поворота инерционных тел относительно корпуса измеряют за счет изменения частот резонансных колебаний электромагнитного поля колебательных контуров. Изобретение позволяет повысить точность измерения, технологичность изготовления и срок службы устройства, реализующего способ. 1 з.п. ф-лы, 11 ил.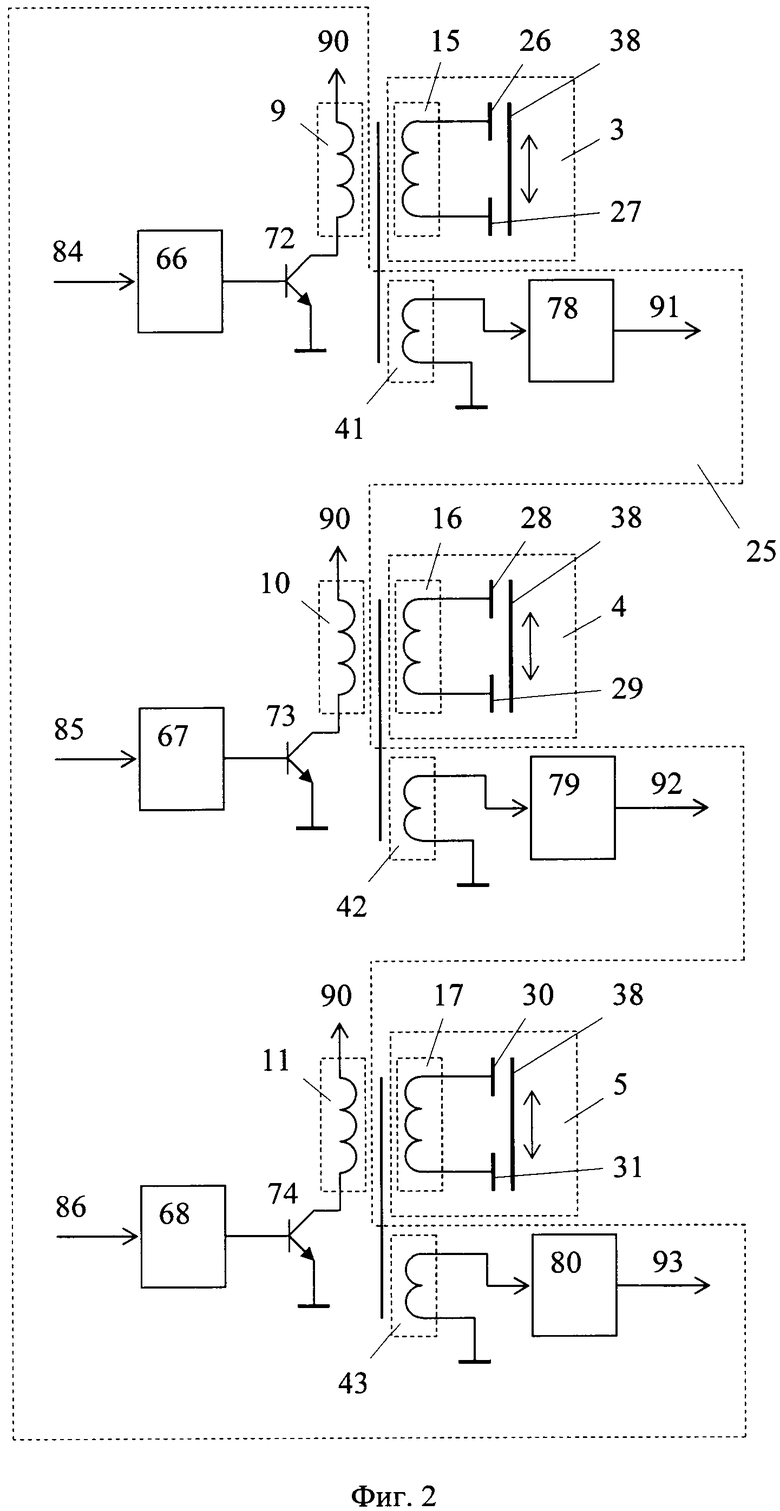
1. Способ измерения параметров углового движения контролируемых объектов путем циклического измерения приращений угла поворота инерционного тела относительно корпуса в заданном временном интервале, отличающийся тем, что два инерционных тела выполняют из магнитострикционного материала, помещают в две газообразные среды с разными значениями давления и возбуждают механические колебания в двух инерционных телах под действием приложенного к двум инерционным телам переменного магнитного поля, возбуждают резонансные колебания электромагнитного поля в двенадцати колебательных контурах, изменяют токи, протекающие через двенадцать катушек индуктивности подкачки энергии в двенадцать колебательных контуров, при изменении указанных токов наводят электродвижущие силы взаимоиндукции в двенадцати катушках индуктивности двенадцати колебательных контуров, под действием которых увеличивают амплитуды резонансных колебаний электромагнитного поля в двенадцати колебательных контурах, изменяют емкости двенадцати колебательных контуров, а приращения углов поворота двух инерционных тел относительно корпуса в заданном временном интервале измеряют за счет изменения частот резонансных колебаний электромагнитного поля двенадцати колебательных контуров.
2. Способ по п.1, отличающийся тем, что механические колебания в двух инерционных телах возбуждают ультразвуковой частотой в диапазоне от 20 кГц и до 50 кГц.
| Способ измерения параметров углового движения объектов | 1975 |
|
SU640207A1 |
| US 7415879 B2, 26.08.2008 | |||
| US 7219547 B2, 22.05.2007 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| JP 2001174263 A, 29.06.2001 | |||
| Датчик положения и скорости | 1980 |
|
SU964535A2 |
| JP 63158432 A, 01.07.1988. | |||

