Область техники, к которой относится изобретение
Настоящее изобретение относится, в общем, к системам множественного доступа с кодовым разделением каналов (МДКР, CDMA) и более конкретно к передаче сигналов управления ресурсами радиосвязи в системах МДКР.
Уровень техники
Высокоскоростной доступ к пакетированным данным нисходящей линии связи (ВС-ДПНЛ, HSDPA) (от базовой станции к подвижному объекту) представляет собой передачу данных с коммутацией пакетов, предлагаемую в сетях широкополосного множественного доступа с кодовым разделением каналов (Ш-МДКР, WCDMA). ВС-ДПНЛ является дальнейшим развитием Ш-МДКР, определяемым Проектом партнерства 3-го поколения (3GPP) в Версии 99 стандарта Ш-МДКР. ВС-ДПНЛ, вводимый в Версии 5 стандарта Ш-МДКР, обеспечивает пиковые скорости передачи пакетированных данных до 10 Мбит/с, используя расширенные характеристики, такие как модуляция более высокого порядка (16 КВАМ, QAM (квадратурная амплитудная модуляция с 16 значащими позициями амплитуды и фазы)), гибридный автоматический запрос на повторение (ГАЗП, H-ARQ) физического уровня, многокодовая передача, быстрая адаптация линии связи и быстрое планирование. Транспортным каналом для ВС-ДПНЛ является высокоскоростной совместно используемый канал нисходящей линии связи (ВС-СИКНЛ, HS-DSCH). ВС-СИКНЛ несет высокоскоростной физический совместно используемый канал нисходящей линии связи (ВС-ФСИКНЛ, HS-PDSCH).
ВС-СИКНЛ представляет собой канал с временным мультиплексированием, совместно используемый множеством подвижных станций. Подвижные станции планируются для приема данных, передаваемых на ВС-ФСИКНЛ обслуживающей базовой станцией. Интервал планирования упоминается как интервал времени передачи (ИВП, TTI). В течение данного ИВП могут быть запланированы одна или больше подвижных станций. Подвижные станции сообщают об условиях в канале базовой станции на канале восходящей линии связи (от подвижного объекта к базовой станции), называемом высокоскоростным специализированным физическим каналом управления (ВС-СФКУ, HS-DPCCH), чтобы обеспечивать возможность базовой станции выполнять решения планирования. Базовая станция планирует подвижную станцию, основываясь, по меньшей мере, частично на сообщаемых условиях в канале. Идентичность подвижных станций, запланированных для приема пакетированных данных на ВС-СИКНЛ в данном ИВП, передается на высокоскоростном совместно используемом канале управления (ВС-СИКУ, HS-SCCH). ВС-СИКУ также используется для пересылки параметров передачи обслуживания, необходимых подвижной станции для декодирования ВС-СИКНЛ, таких как кодовые каналы, размеры транспортируемых блоков и модуляционная схема, используемая в соответствующем ИВП.
В отличие от специализированных физических каналов (СФК, DPCH) в Ш-МДКР для ВС-ДПНЛ мягкая передача обслуживания не поддерживается. Из-за сложности координирования передач пакетированных данных между сотами (ячейками) используется жесткая передача обслуживания (ЖПО, HHO). Подвижная станция измеряет мгновенное значение отношения сигнал/шум пилот-сигнала (контрольного сигнала), принимаемого от каждой ячейки в ее активном наборе, и запрашивает обслуживание от ячейки, обеспечивающей самый сильный сигнал. Когда подвижная станция перемещается в граничную зону между ячейками, уровень сигнала от обслуживающей ячейки уменьшается, в то время как уровень сигнала от соседней ячейки в ее активном наборе увеличивается. Когда уровень сигнала от соседней ячейки превышает уровень сигнала от обслуживающей в данный момент ячейки, подвижная станция запрашивает передачу обслуживания от обслуживающей в данный момент ячейки к определенной целевой ячейке. Когда обслуживающая в данный момент базовая станция подтверждает прием запроса передачи обслуживания, подвижная станция переключается на целевую ячейку и посылает сообщение о завершении передачи обслуживания к целевой базовой станции, чтобы завершить передачу обслуживания. Целевая базовая станция принимает на себя роль обслуживающей базовой станции и начинает передавать пакетированные данные для подвижной станции.
ВС-СИКНЛ согласно Версии 5 стандарта Ш-МДКР всегда работает в сочетании со связанным специализированным физическим каналом (С-СФК, A-DPCH) и на восходящей линии связи, и на нисходящей линии связи. С-СФК переносит сообщения управления ресурсами радиосвязи (УРРС, RRC) между подвижной станцией и базовой станцией. Управление ресурсами радиосвязи представляет собой протокол, который обеспечивает управление подвижной станцией с помощью контроллера сети радиосвязи в сети радиосвязи с абонентами. Функции УРРС включают в себя управление передачей обслуживания подвижной станции в связанном режиме. Версия 6 стандарта Ш-МДКР обеспечивает возможность обслуживающей базовой станции посылать сообщения служебных сигналов УРРС, включая сообщения о передаче обслуживания, для подвижной станции внутри полосы через ВС-ФСИКНЛ вместо С-СФК.
Процедура передачи обслуживания обычно занимает приблизительно 200-800 мс до завершения от момента времени, когда подвижная станция посылает запрос передачи обслуживания. В течение этого периода качество сигнала на ВС-ФСИКНЛ от обслуживающей ячейки может значительно изменяться. Если вместо С-СИКНЛ для отправки сообщений о передаче обслуживания на подвижную станцию используется ВС-ФСИКНЛ, имеется больший риск потери пакетов. Если условия в канале портятся слишком сильно, подвижная станция не будет в состоянии принять сообщение о передаче обслуживания от обслуживающей базовой станции, что может воспрепятствовать завершению передачи обслуживания подвижной станции и может приводить к нарушению линии радиосвязи, то есть к потерянному вызову.
Поэтому существует потребность делать передачу сигналов между базовой станцией и подвижной станцией более устойчивой, особенно когда для передачи сообщений о передаче обслуживания на подвижную станцию используется передача сигналов внутри полосы на ВС-СИКНЛ.
Сущность изобретения
Варианты осуществления настоящего изобретения обеспечивают способ и устройство для улучшения обнаружения сообщений управления ресурсами радиосвязи (УРРС, RRC), передаваемых на подвижную станцию внутри полосы по совместно используемому каналу трафика (информационного обмена) нисходящей линии связи. Способ содержит адаптацию приемника на подвижной станции для снижения вероятности пропущенного обнаружения, когда ожидается, что сообщение УРРС будет посылаться подвижной станции по совместно используемому каналу трафика нисходящей линии связи. Приемник может быть адаптирован посредством изменения конфигурации приемника и/или параметров приема, используемых для приема сигналов. Изменения в конфигурации приемника включают в себя изменение режима приемника (например, от режима многоотводного (RAKE) приема к режиму обобщенного RAKE (GRAKE) приема) или изменение распределения ресурсов приемника (например, количества RAKE/GRAKE указателей) для снижения вероятности пропущенного обнаружения сообщений УРРС на совместно используемом канале трафика нисходящей линии связи. Параметры приема, такие как пороговое значение корреляции, используемое для обнаружения запланированных передач на подвижную станцию по совместно используемому каналу трафика нисходящей линии связи, также могут регулироваться, когда подвижная станция ожидает, что сообщения УРРС будут посланы по совместно используемому каналу трафика нисходящей линии связи.
В одном примерном варианте осуществления подвижная станция уведомляется относительно запланированных передач на совместно используемом канале трафика нисходящей линии связи посредством отправки управляющего сигнала, замаскированного с помощью определенной для подвижной станции (подвижного объекта) последовательности, на подвижную станцию перед запланированной передачей на совместно используемом канале трафика нисходящей линии связи. Подвижная станция сконфигурирована с возможностью контроля канала управления нисходящей линии связи и корреляции управляющего сигнала, принимаемого через канал управления, с помощью ее собственной определенной для подвижной станции последовательности для обнаружения запланированной передачи на совместно используемом канале трафика нисходящей линии связи. Значение корреляции генерируется из управляющего сигнала и сравнивается с пороговым значением корреляции. Когда значение корреляции соответствует пороговому значению, подвижная станция декодирует совместно используемый канал трафика нисходящей линии связи в соответствующем временном интервале, чтобы принять запланированную передачу. Когда подвижная станция ожидает сообщение УРРС от контроллера сети радиосвязи, пороговое значение корреляции может быть понижено для снижения вероятности пропущенного обнаружения (то есть неудачи подвижной станции в отношении обнаружения запланированной передачи).
В качестве примера подвижная станция может посылать сообщение УРРС контроллеру сети радиосвязи в ответ на событие передачи обслуживания. В таком случае подвижная станция ожидает подтверждение приема ее сообщений о передаче обслуживания. Таким образом, подвижная станция может понижать пороговое значение корреляции, используемое для обнаружения запланированных передач на совместно используемом канале нисходящей линии связи, для снижения вероятности пропущенного обнаружения.
Краткое описание чертежей
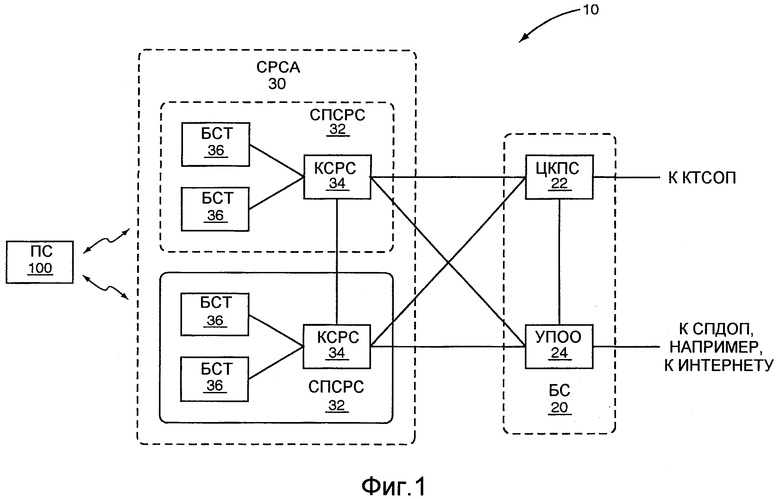
Фиг.1 иллюстрирует примерную сеть связи с подвижными объектами.
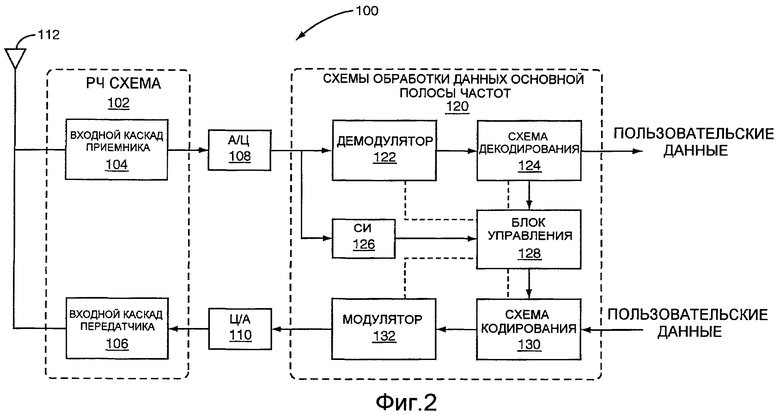
Фиг.2 иллюстрирует примерную подвижную станцию.
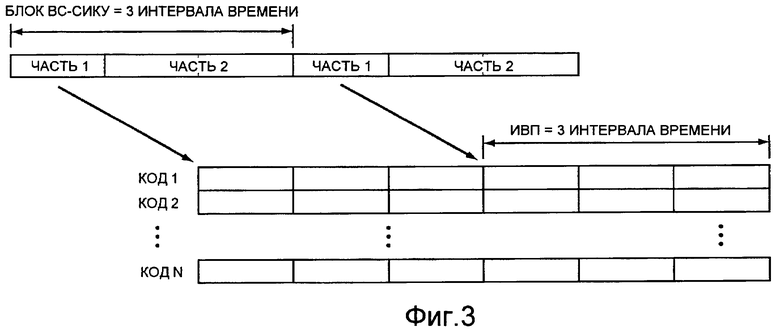
Фиг.3 иллюстрирует способ обнаружения запланированных передач на совместно используемом канале трафика (информационного обмена) нисходящей линии связи.
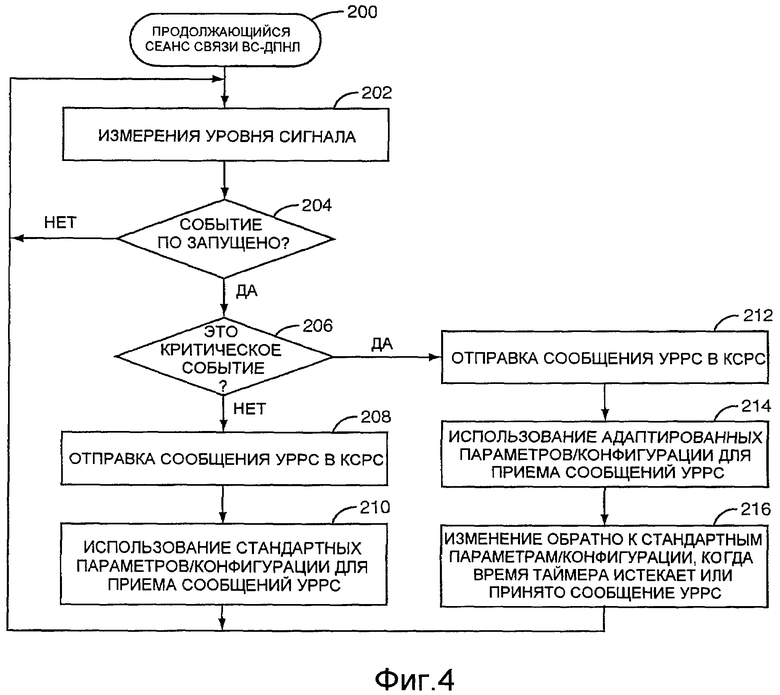
Фиг.4 иллюстрирует и примерную процедуру, реализуемую подвижной станцией для обнаружения запланированных передач на совместно используемом канале информационного обмена нисходящей линии связи.
Подробное описание
Фиг.1 иллюстрирует примерную сеть 10 беспроводной связи для обеспечения услуг мобильной связи с одной или больше подвижными станциями 100. Термин "подвижная станция", как используется в данном описании, относится к любому переносному устройству связи, имеющему возможность беспроводным образом подключаться к системе связи. Термин "подвижная станция" включает в себя без ограничения мобильные телефоны, пейджеры, персональные цифровые ассистенты и компактные портативные компьютеры или карманные компьютеры. Примерная сеть 10 беспроводной связи содержит систему широкополосного множественного доступа с кодовым разделением каналов (Ш-МДКР, WCDMA), как определено Проектом партнерства 3-го поколения (3GPP). Специалистам в данной области техники должно быть понятно, что настоящее изобретение также может использоваться в сетях связи с подвижными объектами, основанных на других стандартах, таких как cdma2000 (множественный доступ с кодовым разделением каналов) (TIA-2000) (Ассоциация промышленности средств связи), 1xEV-DO (TIA-856A) и WiMAX (IEEE 802.16) (Институт инженеров по электротехнике и электронике).
Сеть 10 беспроводной связи содержит базовую сеть (БС, CN) 20, связанную с одной или больше внешними сетями передачи пакетированных данных, такими как Интернет, и с одной или больше сетями радиосвязи с абонентами (СРСА, RAN) 30. Базовая сеть 20 является ответственной за переключение и маршрутизацию вызовов между подвижными станциями 100 и внешними сетями. Базовая сеть 20 может включать в себя центр коммутации подвижной связи (ЦКПС, MSC) 22 для обеспечения обслуживания с коммутацией каналов, и узел поддержки ОУПРС, GPRS (общих услуг пакетной радиосвязи) обслуживания (УПОО, SGSN) 24 для обеспечения услуг с коммутацией пакетов. Основная функция СРСА 30 заключается в обеспечении подвижных станций (ПС, MS) 100 доступом к базовой сети 20. СРСА 30 включает в себя одну или больше сетевых подсистем радиосвязи (СПСРС, RNS) 32. СПСРС 32 содержит контроллер сети радиосвязи (КСРС, RNC) 34 и одну или больше базовых станций (БСТ, BS) 36, упоминаемых в стандартах Ш-МДКР как "Узлы В". В данной заявке используется общий термин "базовая станция" (БСТ) вместо определенного для Ш-МДКР термина "Узел В".
Станции БСТ 36 осуществляют связь с подвижными станциями 100 через радиоинтерфейс и обычно связаны с сотой (ячейкой). БСТ 36 могут обеспечивать обслуживание больше чем в одной ячейке. Контроллер КСРС 34 представляет собой сетевой компонент, который подсоединяет СРСА 30 к базовой сети 20 и управляет функциями СРСА. КСРС 34 руководит БСТ 36 и ресурсами радиосвязи в пределах его области и ограничивает управление ресурсами радиосвязи (УРРС, RRC). УРРС представляет собой протокол, который обеспечивает управление подвижной станцией 100 посредством КСРС 34. Функции УРРС, выполняемые КСРС 34, включают в себя сообщение результатов измерения, активное управление настройками и управление передачей обслуживания. Высокоскоростной доступ к пакетированным данным нисходящей линии связи (ВС-ДПНЛ, HSDPA) представляет собой один способ, реализуемый сетью 10 беспроводной связи, чтобы поставлять пакеты на нисходящей линии связи для подвижной станции 100. ВС-ДПНЛ представляет собой развитие стандарта Ш-МДКР. ВС-ДПНЛ был введен в Версии 5 стандарта Ш-МДКР. Основным назначением ВС-ДПНЛ является увеличение пропускной способности канала передачи данных, используя расширения функциональных возможностей, такие как быстрое планирование, быструю адаптацию линии связи, (гибридный) автоматический запрос на повторение (ГАЗП, HARQ) физического уровня, меньший размер пакетов и многокодовая передача. ВС-ДПНЛ пользуется преимуществом природы пакетного сигнала пакетированных данных, чтобы совместно использовать располагаемые ресурсы радиосвязи среди множества пользователей, и таким образом выполнять более эффективное использование этих ресурсов.
ВС-ДПНЛ обеспечивает новый транспортный канал для высокоскоростной доставки пакетов на нисходящей линии связи, называемый высокоскоростным совместно используемым каналом нисходящей линии связи (ВС-СИКНЛ, HS-DSCH), и три новых физических канала: высокоскоростной физический совместно используемый канал нисходящей линии связи (ВС-ФСИКНЛ, HS-PDSCH) для переноса пользовательских данных, высокоскоростной совместно используемый канал управления (ВС-СИКУ, HS-SCCH) для переноса управляющих сигналов, чтобы идентифицировать запланированную подвижную станцию 100, и для индикации параметров передачи, необходимых для подвижной станции 100, чтобы декодировать ВС-ФСИКНЛ, и высокоскоростной специализированный физический канал управления (ВС-СФКУ, HS-DPCCH) для переноса управляющих сигналов восходящей линии связи, таких как сигналы ACK/NACK (квитирование/отрицательное квитирование) для операции ГАЗП и индикация качества канала (ИКК, CQI) для планирования и регулирования скорости передачи. ВС-ДПНЛ согласно Версии 5 стандарта Ш-МДКР всегда работает вместе с соответствующим связанным специализированным физическим каналом (С-СФК, A-DPCH) и на восходящей линии связи, и на нисходящей линии связи. С-СФК используется для пересылки команд регулирования мощности и также может использоваться для пересылки служебных сигналов УРРС между подвижной станцией 100 и КСРС 34.
Передачи на ВС-СИКНЛ разделены на 2-мс единичные интервалы времени, называемые интервалом времени передачи (ИВП, TTI). ИВП дополнительно разделен на 3 временных интервала по 0,667 мс каждый. ИВП представляет собой базовый единичный интервал времени, используемый для планирования подвижных станций 100 на ВС-СИКНЛ. Планирование представляет собой функцию, выполняемую планировщиком, расположенным в обслуживающей БСТ 36. Планировщик в обслуживающей БСТ 36 определяет, которые подвижные станции 100 должны принимать данные в каждом ИВП, основываясь на таких факторах, как условия в канале, сообщаемые каждой подвижной станцией 100, количество данных, ждущих обработки в буфере для каждой подвижной станции 100, средняя пропускная способность для каждой подвижной станции 100 и какие-нибудь гарантии качества обслуживания (КО, QoS). Алгоритм планирования обычно определяется сетевым оператором. В течение какого-либо данного ИВП, БСТ 36 распределяет до 15 кодов формирования каналов для одной или больше подвижных станций 100.
БСТ 36 идентифицирует запланированную подвижную станцию (станции) 100, выделяет коды и форматирует передачи посредством отправки управляющих сигналов на ВС-СИКУ, как показано на Фиг.3. Как используется в данном описании, термин "управляющие сигналы" означает сигналы, передаваемые БСТ 36 на подвижную станцию 100 и переносящие управляющую информацию, в отличие от сигналов информационного обмена, которые переносят пользовательские данные. ВС-СИКУ представляет собой канал с фиксированной скоростью (60 кбит/с, коэффициент распространения = 128), используемый для передачи идентичности подвижной станции и параметров передачи для ВС-ФСИКНЛ перед началом соответствующего ИВП. Блок ВС-СИКУ представляет собой три интервала времени по продолжительности и разделен на две части. Часть 1 содержит один интервал времени и переносит критическую информацию, необходимую подвижной станции 100, чтобы начать демодуляцию ВС-ФСИКНЛ, такую как выделения кодов для ВС-ФСИКНЛ, размер блоков передачи и модуляционная схема. Часть 2 содержит два интервала времени и переносит менее критическую информацию, такую как контроль циклическим избыточным кодом (КЦИК, CRC) и информацию обработки ГАЗП. БСТ 36 передает два интервала времени ВС-СИКУ перед началом соответствующего ИВП. Обе части передаются с помощью определенной для подвижного объекта последовательности, которая идентифицирует запланированную подвижную станцию 100 в соответствующем ИВП. Например, к управляющему сигналу может применяться маскирующая последовательность, уникальная для этой подвижной станции. Однако, термин "определенный для подвижного объекта сигнал" следует понимать в широком смысле, как относящийся к любой последовательности, которая уникально идентифицирует подвижную станцию. Как описано ниже, подвижная станция 100, которая запланирована, может коррелировать свою определенную для подвижного объекта последовательность с принимаемым управляющим сигналом, чтобы определить, запланирована ли она.
Подвижная станция 100 осуществляет контроль ВС-СИКУ, чтобы определять, когда она запланирована для приема пакетированных данных на ВС-ФСИКНЛ. Подвижная станция 100 коррелирует часть 1 на ВС-СИКУ с помощью конкретной маскирующей последовательности подвижного объекта, чтобы производить значение корреляции, и сравнивает это значение корреляции с пороговым значением корреляции. Этот процесс упоминается в данном описании как обнаружение ВС-СИКУ или обнаружение запланированной передачи. Одновременно подвижная станция 100 декодирует часть 1 на ВС-СИКУ, чтобы получить параметры передачи, необходимые для декодирования ВС-ФСИКНЛ. После декодирования части 1 подвижная станция 100 конфигурирует свой приемник для приема данных на ВС-ФСИКНЛ и начинает декодировать часть 2 на ВС-СИКУ, которая содержит КЦИК и информацию обработки ГАЗП. После декодирования ВС-ФСИКНЛ подвижная станция 100 посылает индикатор ACK/NACK для БСТ 36 на ВС-СФКУ, чтобы указать, были ли пакетированные данные успешно приняты. Методы корреляции для выполнения корреляции части 1 на ВС-СИКУ с помощью определенной для подвижного объекта последовательности описаны в одновременно рассматриваемой патентной заявке США с порядковым №10/780,633, зарегистрированной 19 февраля 2004 г., которая включена здесь путем ссылки. Пороговое значение корреляции, используемое подвижной станцией 100 для обнаружения запланированной передачи на совместно используемом канале информационного обмена нисходящей линии связи, то есть для обнаружения ВС-СИКУ, представляет компромисс между вероятностью ложного обнаружения и вероятностью пропущенного обнаружения. Ложное обнаружение происходит, когда подвижная станция 100 неправильно определяет, что она является запланированным пользователем. Пропущенное обнаружение происходит, когда подвижная станция 100 неуспешно выполняет обнаружение запланированной передачи для подвижной станции 100 на совместно используемом канале информационного обмена нисходящей линии связи. Ложное обнаружение ведет к увеличенной потребляемой мощности на подвижной станции 100, свойственной для подвижной станции, излишне декодирующей часть 2 на ВС-СИКУ и ВС-ФСИКНЛ. Попытка подвижной станции 100 декодировать часть 2 на ВС-СИКУ и ВС-ФСИКНЛ будет терпеть неудачу. Пропущенное обнаружение, с другой стороны, ведет к уменьшенной пропускной способности, поскольку данные для подвижной станции 100 должны передаваться повторно, когда подвижная станция 100 неуспешно выполняет подтверждение приема переданного пакета. Из-за сложности координирования передач нисходящей линии связи на ВС-СИКНЛ в различных ячейках мягкая передача обслуживания на ВС-СИКНЛ не используется, когда подвижная станция 100 перемещается между ячейками. Вместо этого используется жесткая передача обслуживания. Управление передачей обслуживания представляет собой часть функции УРРС, выполняемой КСРС 34. Подвижная станция 100 измеряет мгновенное отношение "сигнал/помеха" (ОСП, SIR) контрольного сигнала, принимаемого от каждой ячейки в ее активном наборе, и запрашивает обслуживание от ячейки, обеспечивающей самый сильный сигнал. Когда подвижная станция 100 перемещается в граничную зону между ячейками, уровень сигнала от обслуживающей ячейки уменьшается, в то время как уровень сигнала от соседней ячейки в ее активном наборе увеличивается. Когда уровень сигнала от соседней ячейки превышает уровень сигнала от обслуживающей в данный момент ячейки, подвижная станция 100 посылает запрос передачи обслуживания на КСРС 34 через обслуживающую в данный момент ячейку. Запрос передачи обслуживания идентифицирует целевую ячейку для передачи обслуживания. КСРС 34 начинает процесс реконфигурации, чтобы переадресовать пакетированные данные к целевой ячейке, и в общепринятых системах посылает сообщение о реконфигурации обратно на подвижную станцию 100 через обслуживающую в данный момент БСТ 36. При получении сообщения о реконфигурации подвижная станция 100 переключается на целевую ячейку и посылает сообщение о передаче обслуживания на КСРС 34 в целевой ячейке, чтобы завершить передачу обслуживания. БСТ 36 для целевой ячейки принимает на себя роль обслуживающей БСТ 36 и начинает передавать пакетированные данные для подвижной станции 100 на ВС-ФСИКНЛ.
В Версии 6 стандарта Ш-МДКР сообщения УРРС, такие как сообщения о передаче обслуживания, от КСРС 34 к подвижной станции 100 могут быть переданы внутри полосы через ВС-ФСИКНЛ или через С-СФК. Возможность использования передачи сигналов УРРС внутри полосы на ВС-ФСИКНЛ была введена для снижения ресурсов радиосвязи, заранее определенных для передачи сигналов. Благодаря использованию передачи служебных сигналов внутри полосы, величина мощности БСТ, выделяемой для С-СФК, снижается, тем самым, увеличивая мощность, располагаемую для ВС-СИКНЛ. Если используется передача сигналов внутри полосы, СФК переносит только информацию регулирования мощности и называется дробным СФК (Д-СФК, F-DPCH). Когда используется передача служебных сигналов внутри полосы на ВС-СИКНЛ для передачи сигналов УРРС, пропущенное обнаружение критических сообщений УРРС становится важным. Когда подвижная станция 100 работает в граничной области между двумя ячейками, качество сигнала от обслуживающей в данный момент БСТ 36 может значительно колебаться. Процедура передачи обслуживания обычно занимает приблизительно 200-800 мс для завершения от момента времени, когда подвижная станция 100 указывает на необходимость передачи обслуживания. Ухудшение качества сигнала от обслуживающей ячейки увеличивает вероятность пропущенного обнаружения. Неудача подвижной станции 100 в отношении обнаружения критических сообщений УРРС, предназначенных для подвижной станции 100, таких как сообщения о передаче обслуживания, из-за ухудшающегося качества сигнала может приводить к более низкой пропускной способности и в случае самого плохого сценария к нарушению линии радиосвязи.
Согласно одному варианту осуществления изобретения пороговое значение корреляции, используемое подвижной станцией 100 для обнаружения запланированных передач на совместно используемом канале информационного обмена нисходящей линии связи, адаптируется, когда подвижная станция 100 ожидает важное сообщение УРРС, с целью снижения вероятности пропущенного обнаружения. Например, когда подвижная станция 100 посылает запрос передачи обслуживания (в Ш-МДКР, известный как Событие 1D) на КСРС 34, подтверждение приема запроса передачи обслуживания (в Ш-МДКР, известное как сообщение о реконфигурации) будет ожидаться в пределах заданного периода времени (например, 100-400 мс). В течение периода времени, в котором подвижная станция 100 ожидает подтверждение приема запроса передачи обслуживания, подвижная станция 100 может понижать используемое пороговое значение корреляции для обнаружения ВС-СИКУ, таким образом, понижая вероятность пропущенного обнаружения. Использование этой методики не ограничено повторным выбором ячейки, а может использоваться для других событий передачи обслуживания. Как используется в данном описании, термин "событие передачи обслуживания" означает любое событие, приводящее к изменению в линии радиосвязи между подвижной станцией 100 и СРСА 30. Сообщения о передаче обслуживания содержат сообщения, запускаемые событием передачи обслуживания. Сообщения о передаче обслуживания включают в себя сообщения, используемые для модифицирования активного набора подвижной станции 100, в дополнение к сообщениям, используемым для повторного выбора ячейки. Например, когда подвижная станция 100 запрашивает модифицирование активного набора (например, добавление ячейки к активному набору (Событие 1A), удаление ячейки из активного набора (Событие 1B) или изменение существующей ячейки в активном наборе на новую ячейку (Событие 1C), пороговое значение корреляции может быть адаптировано так, чтобы улучшать обнаружение ВС-СИКУ. В дополнение к сообщениям о передаче обслуживания другие сообщения или события запуска, которые вызывают отправку сообщения УРРС нисходящей линии связи на подвижную станцию 100 посредством КСРС 34, могут использоваться как запускающий сигнал для регулирования порогового значения корреляции. Регулирование порогового значения корреляции также может зависеть от уровня сигнала от обслуживающей ячейки. Подвижная станция 100 может оценивать уровень сигнала в определении, адаптировать ли пороговое значение корреляции, или для определения величины регулирования, подлежащей выполнению. Например, когда подвижная станция 100 принимает сильный сигнал от обслуживающей ячейки, может быть выполнена небольшая настройка или никакая настройка выполняться не будет. Большая настройка может быть выполнена, когда подвижная станция 100 принимает слабый сигнал от обслуживающей ячейки. Когда пороговое значение корреляции снижается подвижной станцией 100 в ответ на событие запуска, подвижная станция 100 также может определять продолжительность окна, в течение которого применяется сниженное пороговое значение корреляции, упоминаемого в данном описании как окно обнаружения со сниженным пороговым значением. Продолжительность окна обнаружения со сниженным пороговым значением может зависеть от типа события и может быть определена на основании статистических данных, таких как среднее время задержки между событием запуска и ответной передачей сигналов УРРС от КСРС 34. В качестве альтернативы продолжительность окна со сниженным пороговым значением корреляции может быть предварительно вычислена и сохранена в таблицах поиска. В любом случае подвижная станция 100 регулирует пороговое значение в ответ на событие запуска и регулирует пороговое значение обратно к нормальным значениям, когда окно обнаружения со сниженным пороговым значением заканчивается.
Фиг.2 иллюстрирует примерную подвижную станцию 100 в соответствии с настоящим изобретением. Подвижная станция 100 содержит РЧ (радиочастотную) схему 102, подсоединенную к одной или больше антеннам 112, и схемы 120 обработки данных основной полосы частот. РЧ схема 102 содержит входной каскад 104 приемника и входной каскад 106 передатчика. Входной каскад 104 приемника фильтрует, усиливает и преобразует с понижением частоты принимаемый сигнал. Аналого-цифровой преобразователь 108 преобразует принимаемый выходной сигнал, поступающий от входного каскада 104 приемника, в цифровой сигнал, подходящий для обработки схемой 120 обработки данных основной полосы частот. На передающей стороне цифро-аналоговый преобразователь 110 преобразует передаваемые сигналы, поступающие от схемы 120 обработки данных основной полосы частот, в аналоговые сигналы, подходящие для передачи. Входной каскад 106 передатчика модулирует аналоговый передаваемый сигнал на РЧ несущей для передачи.
Схема 120 обработки данных основной полосы частот содержит демодулятор 122, схему 124 декодирования, схему измерений (СИ) 126, блок 128 управления, схему 130 кодирования и модулятор 122. Элементы схемы 120 обработки данных основной полосы частот могут быть реализованы в схеме обработки данных, содержащей один или больше процессоров. Демодулятор 122 демодулирует сигналы, принимаемые через радиоинтерфейс от подвижной станции 100, и передает демодулированные сигналы в схему 124 декодирования. Демодулятор 122 может, например, содержать RAKE приемник, обобщенный RAKE приемник (GRAKE) или приемник с коррекцией амплитудно-частотной характеристики на микросхемах. Демодулятор 132 может быть с перестраиваемой конфигурацией с помощью блока 128 управления. Например, блок 128 управления может селективно конфигурировать приемник или в виде приемника RAKE, или в виде GRAKE приемника (или приемника с корректирующей цепью на микросхемах). Блок 128 управления также может выбирать количество антенн, используемых для обнаружения, и распределять RAKE и/или GRAKE указатели (или ответвления корректирующей цепи на микросхемах) или другие ресурсы приемника.
Схема 124 декодирования выполняет декодирование канала и отделяет пользовательские данные от служебных сигналов управления. Служебные сигналы управления проходят в блок 128 управления, который управляет всей работой подвижной станции 100. Блок 128 управления, который может содержать один или больше процессоров, манипулирует передачей сигналов уровня 2 и уровня 3 и выводит управляющие сигналы для управления работой подвижной станции 100. Управляющие сигналы, показанные пунктирными линиями, управляют демодулятором 122, схемой 124 декодирования, схемой 130 кодирования и модулятором 132. Схема 126 измерений выполняет измерения на принимаемом сигнале, такие как измерения уровня сигнала, измерения качества сигнала и т.д., и обеспечивает результаты измерений для блока 128 управления. Схема 130 кодирования выполняет кодирование канала пользовательских данных и передачи сигналов управления. Модулятор 132 в цифровой форме модулирует выходные сигналы от схемы 130 кодирования, чтобы производить передаваемый сигнал, который подается на цифро-аналоговый преобразователь 110.
Входной каскад 104 приемника, аналого-цифровой преобразователь 108, демодулятор 122 и схема 124 декодирования содержат приемник. Входной каскад 106 передатчика, цифро-аналоговый преобразователь 110, модулятор 132 и схема 130 кодирования содержат передатчик. Элементы или компоненты подвижной станции 100, такие как схема 120 обработки данных основной полосы частот, могут быть реализованы с использованием множества видов аппаратного и программного обеспечения. Например, схему 120 обработки данных основной полосы частот можно реализовать, используя микропроцессоры, микрокомпьютеры, процессоры цифровых сигналов, оборудование специального назначения, такое как интегральная схема прикладной ориентации (ИСПО, ASIC), или их комбинацию. Дополнительно следует оценить, что функции схемы 120 обработки данных основной полосы частот могут быть объединены в единственном устройстве, таком как единственная ИСПО или микропроцессор, или также могут быть распределены среди нескольких устройств.
Фиг.4 представляет собой блок-схему программы, иллюстрирующую примерную процедуру, реализуемую подвижной станцией 100. Процедура выполняется, когда подвижная станция 100 имеет продолжающийся сеанс связи ВС-ДПНЛ (блок 200). В течение сеанса связи ВС-ДПНЛ подвижная станция 100 периодически выполняет измерения уровня сигнала (блок 202). Измерения уровня сигнала используются подвижной станцией 100 для определения, когда выполнять изменения в активном наборе и когда заменять обслуживающую ячейку. Эти события упоминаются в данном описании как события передачи обслуживания. События передачи обслуживания включают в себя добавление ячейки к активному набору (событие 1A), удаление ячейки из активного набора (событие 1B), замену существующей ячейки в активном наборе на новую ячейку (событие 1C) и изменение обслуживающей ячейки (событие 1D). Подвижная станция 100 обнаруживает события передачи обслуживания, основываясь на измерениях уровня сигнала, как известно в данной области техники. При обнаружении события передачи обслуживания (ПО, HO) (блок 204) подвижная станция 100 определяет, является ли обнаруженное событие передачи обслуживания критическим событием (блок 206). Если событие передачи обслуживания не является критическим событием, подвижная станция 100 посылает уведомление (например, события 1A, 1B, 1C и 1D) на КСРС 34, чтобы уведомить КСРС 34 о событии (блок 208), и ожидает ответное сообщение. В этом случае подвижная станция 100 использует нормальное пороговое значение корреляции для обнаружения ВС-СИКУ (блок 210). С другой стороны, если событие передачи обслуживания является критическим событием, подвижная станция 100 посылает сообщение УРРС на восходящей линии связи на КСРС 34 (блок 212) и использует отрегулированное пороговое значение корреляции для обнаружения ВС-СИКУ (блок 214). После приема ожидаемого ответа или после того, как окно обнаружения со сниженным пороговым значением истекает, подвижная станция 100 изменяется обратно к устанавливаемым по умолчанию параметрам обнаружения ВС-СИКУ (блок 216). Примеры критических событий включают в себя События 1A и 1C, когда уровень сигнала от обслуживающей ячейки является слабым, и Событие 1D. События 1A и 1C не могут рассматриваться как критические события, если от обслуживающей ячейки принимается сильный контрольный сигнал. В некоторых вариантах осуществления Событие 1B может рассматриваться не как критическое событие.
В примерном варианте осуществления изобретения описанном выше, подвижная станция 100 адаптирует пороговое значение корреляции для обнаружения ВС-СИКУ, чтобы понижать вероятность неправильного обнаружения. Специалистам в данной области техники должно быть понятно, что могут использоваться другие способы вместо описанных выше способов, или в дополнение к ним, с целью улучшения вероятности обнаружения критических сообщений УРРС. Например, блок 128 управления может адаптировать конфигурацию приемника, чтобы улучшать вероятность обнаружения критических сообщений УРРС. Если используется RAKE приемник или GRAKE приемник для приема сигналов на нисходящей линии связи, подвижная станция 100 может распределять дополнительные RAKE или GRAKE указатели для ВС-СИКУ, когда ожидается критическое сообщение УРРС. Использование дополнительных RAKE указателей может улучшать вероятность приема и правильного декодирования ВС-СИКУ и таким образом понижать вероятность пропущенного обнаружения. В качестве альтернативы подвижная станция 100 может использовать более усовершенствованную конфигурацию приемника, например, конфигурацию GRAKE, для обнаружения ВС-СИКУ, когда ожидаются критические сообщения УРРС, а в других случаях для обнаружения ВС-СИКУ может использовать стандартный RAKE приемник. Приемник также может быть адаптирован посредством изменения количества приемных антенн 112. Описанные выше адаптации для ВС-СИКУ также могут быть выполнены для ВС-ФСИКНЛ. В широком смысле может использоваться любая "адаптация приемника", которая понижает вероятность пропущенного обнаружения ВС-СИКУ или ВС-ФСИКНЛ. Такая адаптация может включать в себя адаптацию конфигурации приемника и/или адаптацию параметров приема, таких как пороговое значение корреляции для ВС-СИКУ или ВС-ФСИКНЛ.
Настоящее изобретение, конечно, может быть выполнено способами, отличающимися от способов, которые были определенно сформулированы в данном описании, не отступая при этом от основных характеристик изобретения. Настоящие варианты осуществления должны рассматриваться во всех отношениях как иллюстративные, а не как ограничивающие, и все видоизменения, находящиеся в пределах диапазона значений и эквивалентности прилагаемой формулы изобретения, предназначены для того, чтобы быть ею охваченными.
Изобретение относится к системам множественного доступа с кодовым разделением каналов. Предложен адаптивный способ, реализуемый подвижной станцией, который улучшает вероятность обнаружения управляющих сообщений, передаваемых в подвижную станцию внутри полосы на совместно используемом канале графика нисходящей линии связи. Когда подвижная станция ожидает, что управляющее сообщение будет передано на совместно используемом канале графика нисходящей линии связи, подвижная станция может адаптировать конфигурацию приемника и/или параметры приемника для снижения вероятности пропущенного обнаружения управляющих сообщений. В одном варианте осуществления подвижная станция сконфигурирована с возможностью регулирования порогового значения корреляции, используемое для упомянутого обнаружения запланированной передачи, для снижения вероятности пропущенного обнаружения. Техническим решением является более устойчивая передача сигналов между базовой станцией и подвижной станцией. 3 н. и 58 з.п. ф-лы, 4 ил.
1. Способ обнаружения сообщений управления ресурсами радиосвязи, передаваемых внутри полосы на совместно используемом канале трафика нисходящей линии связи, реализуемый подвижной станцией, содержащий этапы, на которых:
обнаруживают запланированные передачи на совместно используемом канале трафика нисходящей линии связи, предназначенные для подвижной станции, посредством коррелирования определенной для подвижной станции последовательности, которая уникально идентифицирует подвижную станцию, с управляющим сигналом, передаваемым через канал управления, перед запланированной передачей на совместно используемом канале трафика нисходящей линии связи, и
когда ожидается сообщение управления ресурсами радиосвязи на совместно используемом канале нисходящей линии связи, регулируют пороговое значение корреляции, используемое для упомянутого обнаружения запланированной передачи, чтобы снизить вероятность пропущенного обнаружения.
2. Способ по п.1, в котором обнаружение запланированных передач на совместно используемом канале трафика нисходящей линии связи содержит этап, на котором сравнивают значение корреляции, производимое из упомянутого управляющего сигнала, с упомянутым пороговым значением корреляции.
3. Способ по п.1, в котором регулирование порогового значения корреляции, когда ожидается сообщение управления ресурсами радиосвязи, содержит этап, на котором регулируют пороговое значение корреляции в ответ на событие передачи обслуживания.
4. Способ по п.3, дополнительно содержащий этап, на котором отправляют сообщение с запросом в ответ на упомянутое событие передачи обслуживания, причем регулирование порогового значения корреляции выполняют для улучшения обнаружения ответа на упомянутое сообщение с запросом.
5. Способ по п.4, в котором упомянутое сообщение с запросом содержит запрос на изменение обслуживающей соты.
6. Способ по п.4, в котором упомянутое сообщение с запросом содержит запрос на изменение принадлежности к активному набору для упомянутой подвижной станции.
7. Способ по п.3, в котором регулирование порогового значения корреляции в ответ на событие передачи обслуживания содержит этапы, на которых:
определяют, является ли событие передачи обслуживания критическим событием, и
регулируют пороговое значение корреляции, если событие передачи обслуживания является критическим событием.
8. Способ по п.7, дополнительно содержащий этап, на котором оставляют пороговое значение корреляции неизменным, если событие передачи обслуживания является не критическим событием.
9. Способ по п.3, в котором регулирование порогового значения корреляции в ответ на событие передачи обслуживания содержит этап, на котором изменяют пороговое значение корреляции для заданного периода времени.
10. Способ по п.9, в котором продолжительность заданного периода времени зависит от типа события передачи обслуживания.
11. Способ по п.9, дополнительно содержащий этап, на котором регулируют пороговое значение корреляции к предыдущему значению, когда заданный период времени истекает.
12. Способ по п.1, в котором регулирование порогового значения корреляции содержит этап, на котором определяют величину изменения в пороговом значении корреляции.
13. Способ по п.12, в котором величину изменения в пороговом значении корреляции определяют на основании уровня сигнала, принимаемого в подвижной станции от обслуживающей соты.
14. Способ по п.12, в котором величину изменения в пороговом значении корреляции определяют на основании типа события передачи обслуживания.
15. Способ по п.1, в котором канал управления содержит высокоскоростной совместно используемый канал управления в системе широкополосного множественного доступа с кодовым разделением каналов (Ш-МДКР), и в котором упомянутый совместно используемый канал трафика содержит высокоскоростной физический совместно используемый канал нисходящей линии связи в системе Ш-МДКР.
16. Подвижная станция, содержащая:
приемник, сконфигурированный с возможностью приема пакетов по совместно используемому каналу трафика нисходящей линии связи,
блок управления, сконфигурированный с возможностью обнаружения запланированных передач пакетов в подвижную станцию по совместно используемому каналу трафика нисходящей линии связи и адаптирования упомянутого приемника для снижения вероятности пропущенного обнаружения, когда подвижная станция ожидает, что подвижной станции будет послано сообщение управления ресурсами радиосвязи по совместно используемому каналу трафика нисходящей линии связи.
17. Подвижная станция по п.16, в которой блок управления сконфигурирован с возможностью адаптации приемника посредством изменения конфигурации приемника, когда подвижная станция ожидает, что сообщение управления ресурсами радиосвязи будет послано подвижной станции по совместно используемому каналу трафика нисходящей линии связи.
18. Подвижная станция по п.17, в которой блок управления сконфигурирован с возможностью изменения конфигурации приемника посредством изменения режима приема упомянутого приемника.
19. Подвижная станция по п.18, в которой блок управления сконфигурирован с возможностью изменения режима приема от режима многоотводного RAKE приема к режиму обобщенного RAKE приема, когда ожидается, что будут переданы сообщения управления ресурсами радиосвязи по совместно используемому каналу трафика нисходящей линии связи.
20. Подвижная станция по п.18, в которой блок управления сконфигурирован с возможностью изменения режима приема посредством изменения количества приемных антенн, используемых приемником.
21. Подвижная станция по п.17, в которой приемник включает в себя RAKE приемник или обобщенный RAKE приемник, имеющий множество RAKE указателей, и в которой блок управления сконфигурирован с возможностью изменения режима приема посредством изменения распределения RAKE указателей для канала управления.
22. Подвижная станция по п.16, в которой блок управления адаптирует приемник посредством изменения параметров приема, используемых упомянутым приемником, когда подвижная станция ожидает, что подвижной станции будет послано сообщение управления ресурсами радиосвязи по совместно используемому каналу трафика нисходящей линии связи.
23. Подвижная станция по п.22, в которой блок управления сконфигурирован с возможностью адаптации запланированных передач на упомянутом совместно используемом канале трафика нисходящей линии связи посредством корреляции управляющего сигнала, передаваемого на канале управления перед запланированной передачей на совместно используемом канале трафика нисходящей линии связи, с помощью определенной для подвижной станции последовательности, которая уникально идентифицирует подвижную станцию.
24. Подвижная станция по п.23, в которой канал управления содержит высокоскоростной совместно используемый канал управления в системе широкополосного множественного доступа с кодовым разделением каналов (Ш-МДКР), и в которой упомянутый совместно используемый канал трафика содержит высокоскоростной физический совместно используемый канал нисходящей линии связи в системе Ш-МДКР.
25. Подвижная станция по п.24, в которой блок управления сконфигурирован с возможностью корреляции упомянутого управляющего сигнала с помощью определенной для подвижной станции последовательности, которая уникально идентифицирует подвижную станцию, посредством создания значения корреляции и сравнения значения корреляции с пороговым значением корреляции.
26. Подвижная станция по п.25, в которой блок управления сконфигурирован с возможностью адаптации приемника посредством адаптации порогового значения корреляции, когда ожидается сообщение управления ресурсами радиосвязи на совместно используемом канале нисходящей линии связи.
27. Подвижная станция по п.26, в которой блок управления сконфигурирован с возможностью адаптации порогового значения корреляции в ответ на событие передачи обслуживания.
28. Подвижная станция по п.27, в которой блок управления сконфигурирован с возможностью посылки сообщения с запросом в ответ на упомянутое событие передачи обслуживания, и в которой блок управления сконфигурирован с возможностью регулирования упомянутого порогового значения корреляции для улучшения обнаружения ответа на упомянутое сообщение с запросом.
29. Подвижная станция по п.28, в которой сообщение с запросом содержит запрос на изменение обслуживающей соты.
30. Подвижная станция по п.28, в которой упомянутое сообщение с запросом содержит запрос на изменение принадлежности к активному набору для упомянутой подвижной станции.
31. Подвижная станция по п.27, в которой блок управления сконфигурирован с возможностью регулирования порогового значения корреляции, если событие передачи обслуживания представляет собой критическое событие.
32. Подвижная станция по п.31, в которой блок управления сконфигурирован с возможностью оставления порогового значения корреляции неизменным, если событие передачи обслуживания представляет собой не критическое событие.
33. Подвижная станция по п.27, в которой блок управления сконфигурирован с возможностью адаптации порогового значения корреляции, когда ожидается сообщение управления ресурсами радиосвязи на совместно используемом канале нисходящей линии связи, посредством изменения порогового значения корреляции для заданного периода времени.
34. Подвижная станция по п.33, в которой период времени зависит от типа события передачи обслуживания.
35. Подвижная станция по п.33, в которой блок управления сконфигурирован с возможностью регулирования порогового значения корреляции к предыдущему значению, когда заданный период времени истекает.
36. Подвижная станция по п.27, в которой блок управления сконфигурирован с возможностью адаптации порогового значения корреляции посредством определения величины изменения в пороговом значении корреляции.
37. Подвижная станция по п.36, в которой блок управления сконфигурирован с возможностью определения величины изменения в пороговом значении корреляции на основании уровня сигнала, принимаемого в подвижной станции от базовой станции в обслуживающей соте.
38. Подвижная станция по п.36, в которой блок управления сконфигурирован с возможностью определения величины изменения в пороговом значении корреляции на основании типа события передачи обслуживания.
39. Способ обнаружения сообщений управления ресурсами радиосвязи, передаваемых внутри полосы на совместно используемом канале трафика нисходящей линии связи, реализуемый подвижной станцией, содержащий этапы, на которых:
адаптируют приемник в подвижной станции для снижения вероятности пропущенного обнаружения пакетов на совместно используемом канале нисходящей линии связи, когда подвижная станция ожидает, что подвижной станции будет послано сообщение управления ресурсами радиосвязи по совместно используемому каналу нисходящей линии связи.
40. Способ по п.39, в котором адаптация приемника содержит этап, на котором изменяют конфигурацию приемника, когда подвижная станция ожидает, что подвижной станции будет послано сообщение управления ресурсами радиосвязи по совместно используемому каналу нисходящей линии связи.
41. Способ по п.40, в котором изменение конфигурации приемника содержит этап, на котором изменяют режим приема упомянутого приемника.
42. Способ по п.41, в котором изменение режима приема упомянутого приемника содержит этап, на котором изменяют режим приема от режима многоотводного приема (RAKE) к режиму обобщенного RAKE приема.
43. Способ по п.41, в котором изменение режима приема упомянутого приемника содержит этап, на котором изменяют количество приемных антенн, используемых приемником.
44. Способ по п.40, в котором приемник содержит RAKE приемник или обобщенный RAKE приемник, имеющий множество RAKE указателей, и в котором изменение конфигурации приемника содержит этап, на котором изменяют распределение упомянутых RAKE указателей.
45. Способ по п.39, в котором адаптация приемника содержит этап, на котором изменяют параметры приема, используемые упомянутым приемником, когда подвижная станция ожидает, что подвижной станции будет послано сообщение управления ресурсами радиосвязи по совместно используемому каналу нисходящей линии связи.
46. Способ по п.45, дополнительно содержащий этап, на котором контролируют канал управления для обнаружения, запланирована ли подвижная станция для приема данных на упомянутом совместно используемом канале нисходящей линии связи.
47. Способ по п.46, в котором канал управления содержит высокоскоростной совместно используемый канал управления в системе широкополосного множественного доступа с кодовым разделением каналов (Ш-МДКР), и в котором упомянутый совместно используемый канал трафика содержит высокоскоростной физический совместно используемый канал нисходящей линии связи в системе Ш-МДКР.
48. Способ по п.46, в котором контроль канала управления для обнаружения, запланирована ли подвижная станция для приема данных на упомянутом совместно используемом канале нисходящей линии связи, содержит этапы, на которых:
коррелируют управляющий сигнал с помощью определенной для подвижной станции последовательности, которая уникально идентифицирует подвижную станцию, для создания значения корреляции, и
сравнивают значение корреляции с пороговым значением корреляции.
49. Способ по п.48, в котором адаптация приемника содержит этап, на котором адаптируют пороговое значение корреляции, когда ожидается сообщение управления ресурсами радиосвязи на совместно используемом канале нисходящей линии связи.
50. Способ по п.49, в котором адаптация порогового значения корреляции, когда ожидается сообщение управления ресурсами радиосвязи, содержит этап, на котором адаптируют пороговое значение корреляции в ответ на событие передачи обслуживания.
51. Способ по п.50, дополнительно содержащий этап, на котором отправляют сообщение с запросом в ответ на упомянутое событие передачи обслуживания, причем регулирование порогового значения корреляции выполняют для улучшения обнаружения ответа на упомянутое сообщение с запросом.
52. Способ по п.51, в котором упомянутое сообщение с запросом содержит запрос на изменение обслуживающей соты.
53. Способ по п.51, в котором упомянутое сообщение с запросом содержит запрос на изменение принадлежности к активному набору для упомянутой подвижной станции.
54. Способ по п.50, в котором регулирование порогового значения корреляции в ответ на событие передачи обслуживания содержит этап, на котором:
определяют, является ли событие передачи обслуживания критическим событием, и
регулируют пороговое значение корреляция, если событие передачи обслуживания является критическим событием.
55. Способ по п.54, дополнительно содержащий этап, на котором оставляют пороговое значение корреляции неизменным, если событие передачи обслуживания является не критическим событием.
56. Способ по п.50, в котором адаптация порогового значения корреляции, когда ожидается сообщение управления ресурсами радиосвязи на совместно используемом канале нисходящей линии связи, содержит этап, на котором изменяют пороговое значение корреляции для заданного периода времени.
57. Способ по п.56, в котором продолжительность заданного периода времени зависит от типа события передачи обслуживания.
58. Способ по п.56, дополнительно содержащий этап, на котором регулируют пороговое значение корреляции к предыдущему значению, когда заданный период времени истекает.
59. Способ по п.50, в котором адаптация порогового значения корреляции содержит этап, на котором определяют величину изменения в пороговом значении корреляции.
60. Способ по п.59, в котором величину изменения определяют на основании уровня сигнала, принимаемого в подвижной станции от базовой станции в обслуживающей соте.
61. Способ по п.59, в котором величину изменения определяют на основании типа события передачи обслуживания.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СНИЖЕНИЕ МОЩНОСТИ В РАДИОТЕЛЕФОНЕ СОТОВОЙ СИСТЕМЫ РАДИОСВЯЗИ | 1995 |
|
RU2141725C1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 5182753 A, 26.01.1993. | |||

