Изобретение относится к средству маршрутизации для подводного электронного модуля (SEM).
Подводные электронные модули предпочтительно используются в подводных блоках управления (SCU), например, блоках управления скважин (WCU) для исследования и эксплуатации газовых и нефтяных месторождений, расположенных на морском дне. Газовые и нефтяные месторождения, которые исследуются или эксплуатируются с использованием электронной коммуникации со скважинами или с другими подводными блоками управления, иногда называют «электронными месторождениями» (е-месторождениями).
В типовом случае различные подводные блоки управления и различные датчики располагаются вблизи соответствующего газового и нефтяного месторождения и соединяются со станцией управления на поверхности. Для этой цели используется подводная связь. Например, данные процесса передаются между станцией управления на поверхности и подводными блоками управления. Для того чтобы не требовать индивидуальной связи и линий питания для каждого подводного блока управления, подводные блоки управления располагаются на морском дне в сетевой топологии. Один сетевой элемент оснащается модемом для подводной связи со станцией управления на поверхности. Данные процесса маршрутизируются в сети для достижения соответствующего получателя, например, либо станции управления на поверхности, либо некоторого подводного электронного модуля. Обычно для сети используется дифференциальная последовательная шина.
В предшествующем уровне техники описаны различные методы для подводной связи. С одной стороны, имеются проводные электрические или оптические соединения, с другой стороны, имеются беспроводные соединения. Проводные соединения могут быть разделены на первую группу, обеспечивающую линии связи для электронных или оптических соединений, отдельно от линий электропитания, и вторую группу, использующую линии питания для электронной связи. В последнем случае предпочтительным образом не требуются отдельные линии связи.
Известные подводные блоки управления требуют одной карты маршрутизации для каждого элемента сети/шины, которые должны быть непосредственно соединены с ними. Следовательно, если несколько ведомых (подчиненных) подводных блоков управления должны быть соединены с одним подводным ведущим (главным) блоком управления, содержащим модем, то такое же число карт маршрутизации должно быть установлено в подводный ведущий блок управления. Эти многочисленные карты требуют пространства для размещения и потребляют мощность питания. Кроме того, в предшествующем уровне техники сети, образованные соединением подчиненных подводных блоков управления посредством подводных кабелей, требуют фиксированной битовой скорости передачи. Дополнительно, надежность известных сетей ограничена, поскольку если линия связи между двумя подчиненными подводными блоками управления прервана, больше уже невозможна связь между ними.
Целью настоящего изобретения является специфицировать средство маршрутизации для подводного электронного модуля, в котором можно сэкономить пространство для размещения и мощность внутри подводного электронного модуля, и который обеспечивает возможность выполнения способа для соединения двух подчиненных подводных электронных модулей с улучшенной надежностью.
Эта задача решается средством маршрутизации, содержащим признаки, приведенные в пункте 1, и подводным электронным модулем, содержащим признаки, приведенные в пункте 14, соответственно.
Предпочтительные варианты осуществления изобретения приведены в зависимых пунктах формулы изобретения.
Согласно изобретению, средство маршрутизации для подводного электронного модуля содержит микроконтроллер, программируемую пользователем матрицу логических элементов и, по меньшей мере, два ресурса маршрутизации, причем каждый ресурс маршрутизации содержит соответствующий локальный приемопередатчик для дифференциальной последовательной шины и соответствующий удаленный приемопередатчик для дифференциальной последовательной шины, причем каждый локальный приемопередатчик соединен с соответствующим удаленным приемопередатчиком и с упомянутой программируемой пользователем матрицей логических элементов, которая способна маршрутизировать пакеты данных между упомянутыми ресурсами маршрутизации. Если такое средство маршрутизации используется в подводном электронном модуле, потребление мощности, а также требуемое пространство значительно сокращаются в сравнении с известным множеством карт маршрутизатора.
В частности, упомянутые приемопередатчики могут быть полудуплексными приемопередатчиками для реализации дифференциальной последовательной шины PROFIBUS DP. Альтернативно, дифференциальная последовательная шина может быть шиной CAN.
Был создан опытный образец варианта осуществления средства маршрутизации, содержащий предпочтительным образом всего четыре из упомянутых ресурса маршрутизатора. В таком варианте осуществления необходима только одна плата маршрутизатора вместо четырех обычных карт. Поэтому подводный электронный модуль может быть сконструирован очень компактно.
Высокая отказоустойчивость подводных сетей может быть достигнута в варианте осуществления, где каждый из упомянутых удаленных приемопередатчиков является гальванически изолированным от соответствующего локального приемопередатчика. Отказы и дефекты вследствие пиков напряжения, разностей потенциалов или коротких замыканий в подводном кабеле могут быть устранены посредством этого варианта осуществления.
Отказоустойчивость может быть еще более увеличена в варианте осуществления, где упомянутые удаленные приемопередатчики являются плавающими, а упомянутые локальные приемопередатчики соединены с локальным электрическим заземлением. Ошибки вследствие разностей потенциалов могут быть исключены таким путем.
В другом варианте осуществления каждый из упомянутых удаленных приемопередатчиков содержит активное средство согласованной нагрузки шины и средство смещения. Это также увеличивает отказоустойчивость, поскольку остальная шина/сеть может сохранять работоспособность, даже если один подводный кабель прерван, например, если он случайно разрезан.
Предпочтительным образом каждый из упомянутых удаленных приемопередатчиков запитывается от соответствующего преобразователя постоянного тока в постоянный ток. Таким путем напряжение, требуемое для работы подсоединенного подчиненного компонента, может поддерживаться отдельно для каждого подводного соединения. Это повышает отказоустойчивость.
В усовершенствованном варианте осуществления каждый из преобразователей постоянного тока в постоянный ток является отдельно отсоединяемым. Это позволяет снизить потребление питания путем выключения преобразователей для ресурсов маршрутизатора, которые не связаны с какими-либо элементами шины, т.е. когда они не используются.
Предпочтительным образом упомянутые локальные приемопередатчики подсоединены параллельно. В этой форме ресурсы маршрутизатора работают просто как концентратор для данных шины.
Предпочтительным образом, упомянутый микроконтроллер и упомянутая программируемая пользователем матрица логических элементов могут соединяться с основным блоком управления подводного электронного модуля через шину управления. Это обеспечивает возможность быстрого обмена данными между основным блоком управления и средством маршрутизации, в частности, для передачи пакетов данных к модему, управляемому основным блоком управления.
В другом варианте осуществления упомянутая шина управления может соединяться с основным блоком управления через штепсельное соединение. Поэтому схемная плата может просто заменяться в случае дефекта или обновления аппаратных средств. В частности, она может проектироваться как наращиваемая плата, как предусмотрено стандартом РС104, тем самым дополнительно сокращая требуемое пространство для размещения.
Потребное пространство может быть уменьшено еще больше в варианте осуществления, в котором одна схемная плата содержит, по меньшей мере, один интерфейс ввода/вывода для цифровых и/или аналоговых значений процесса. Дополнительные платы интерфейса ввода/вывода могут быть опущены при использовании этого варианта осуществления, тем самым дополнительно сокращая пространство и потребление мощности в подводном электронном модуле. В настоящем изобретении, термин «интерфейс ввода/вывода» содержит как однонаправленные, так и двунаправленные интерфейсы, т.е. чисто интерфейсы ввода, чисто интерфейсы вывода и объединенные интерфейсы ввода/вывода.
Предпочтительным образом упомянутые ресурсы маршрутизатора обеспечивают переменную битовую скорость передачи. Скорость передачи по дифференциальной шине может, таким образом, настраиваться, например, на скорость передачи линии к станции управления на поверхности. Такая линия может быть, например, линией электропитания. В частности, битовая скорость по дифференциальной шине может быть установлена, чтобы полностью использовать фактическую максимальную скорость передачи по линии связи с поверхностью. В частности, в вариантах осуществления, где микроконтроллер и программируемая пользователем матрица логических элементов могут соединяться с основным блоком управления подводного электронного модуля через шину управления, битовая скорость к любому подсоединенному удаленному подчиненному устройству может настраиваться через средство маршрутизации. Каждый канал маршрутизации является прозрачным по отношению к битовой скорости данных, передаваемых по нему.
Предпочтительным образом, для специальных вариантов осуществления связи по линии питания к станции на поверхности, упомянутая программируемая пользователем матрица логических элементов обеспечивает прозрачную битовую скорость с постоянной задержкой. Это позволяет станции управления на поверхности использовать максимально возможную битовую скорость передачи и свободно настраивать битовую скорость дифференциальной шины блока управления на поверхности.
Разумеется, изобретение также относится к подводному электронному модулю для подводного блока управления, причем подводный электронный модуль содержит средство маршрутизации согласно изобретению.
В предпочтительном варианте осуществления такого подводного электронного модуля подчиненный электронный блок соединен с двумя из упомянутых ресурсов маршрутизатора параллельно через два параллельных соединения дифференциальной шины. Соответствующий способ согласно изобретению предлагает соединить первую линию дифференциальной последовательной шины с первым удаленным приемопередатчиком первого подводного электронного модуля и с первым удаленным приемопередатчиком второго подводного электронного модуля, и соединить вторую линию дифференциальной последовательной шины со вторым удаленным приемопередатчиком первого подводного электронного модуля и с вторым удаленным приемопередатчиком второго подводного электронного модуля. Этот вариант осуществления и этот способ обеспечивают избыточность для соединения между подводным электронным блоком и подчиненным электронным блоком. Например, если один подводный кабель, соединяющий их, будет разрезан, например, падающим объектом, то остальные по-прежнему будут обеспечивать соединение.
В последующем описании изобретение описано более подробно со ссылками на чертежи, на которых показано следующее:
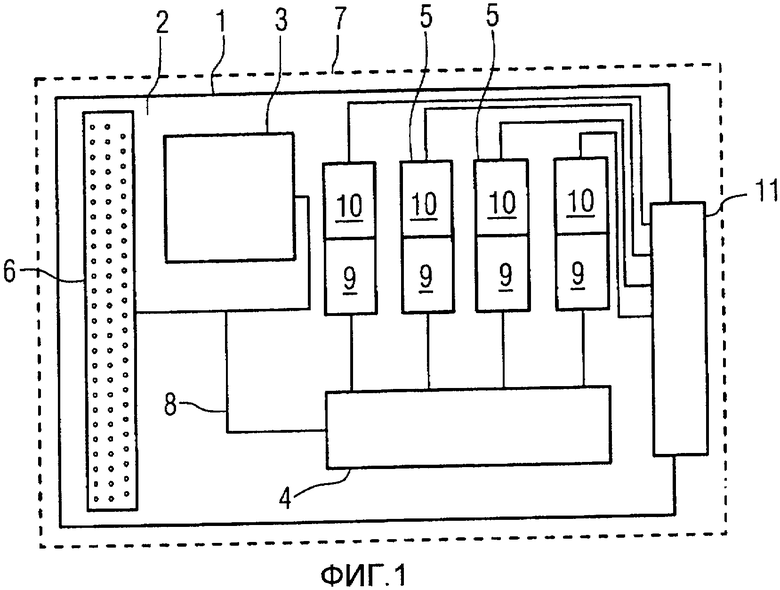
Фиг.1 - блок-схема первой стороны схемной платы средства маршрутизации.
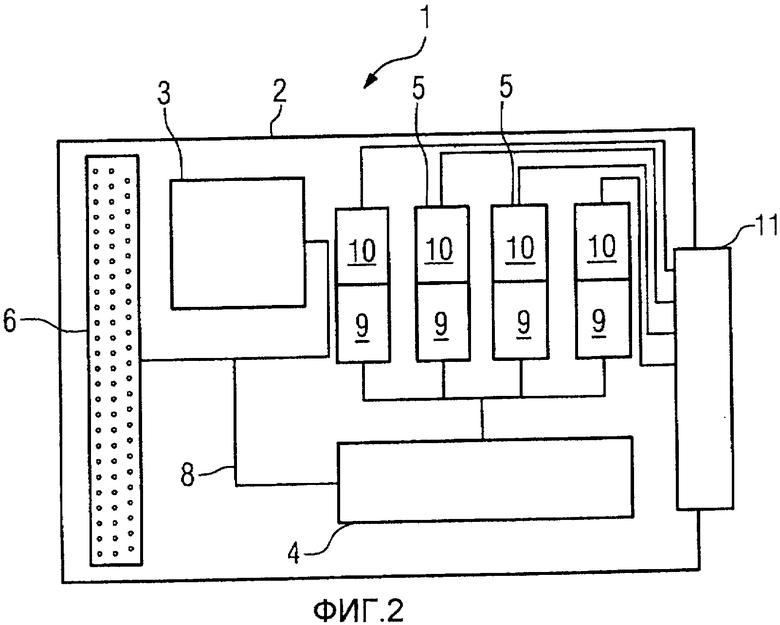
Фиг.2 - блок-схема первой стороны альтернативной схемной платы средства маршрутизации.
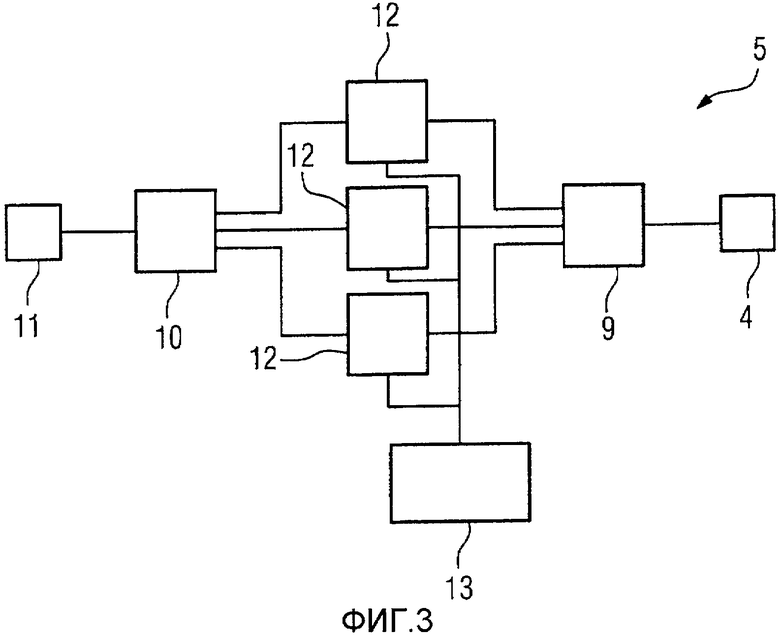
Фиг.3 - блок-схема одного ресурса маршрутизатора.
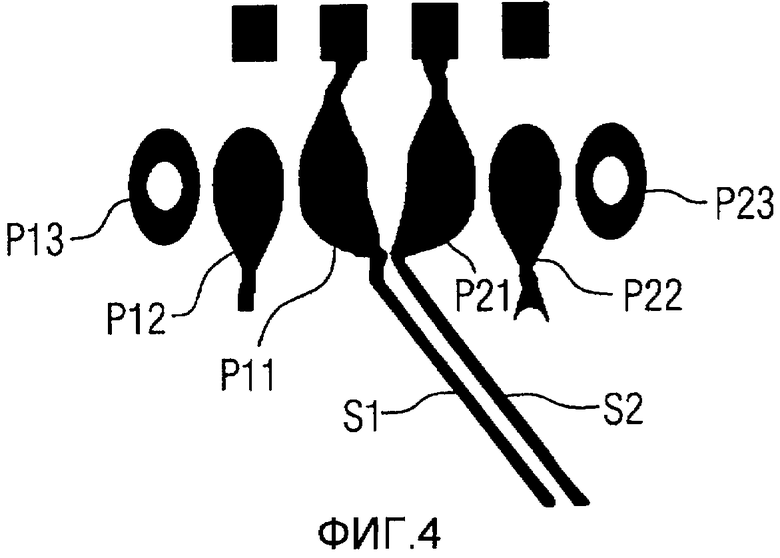
Фиг.4 - гибкая конфигурация различных согласованных нагрузок посредством монтажных контактных площадок в каждом ресурсе маршрутизатора.
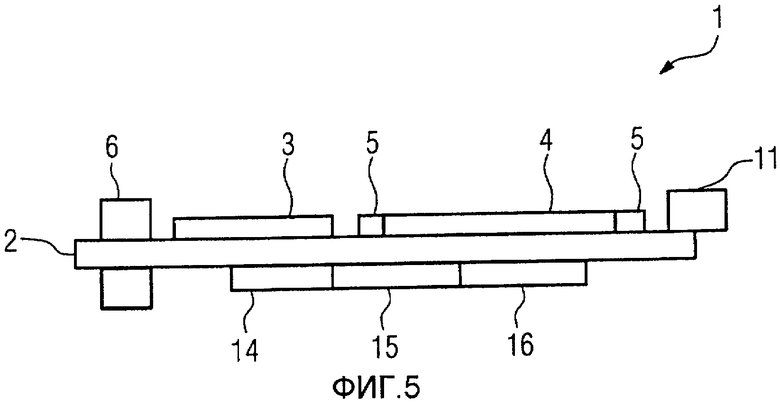
Фиг.5 - схематичное представление вида сбоку схемной платы средства маршрутизации по фиг.1.
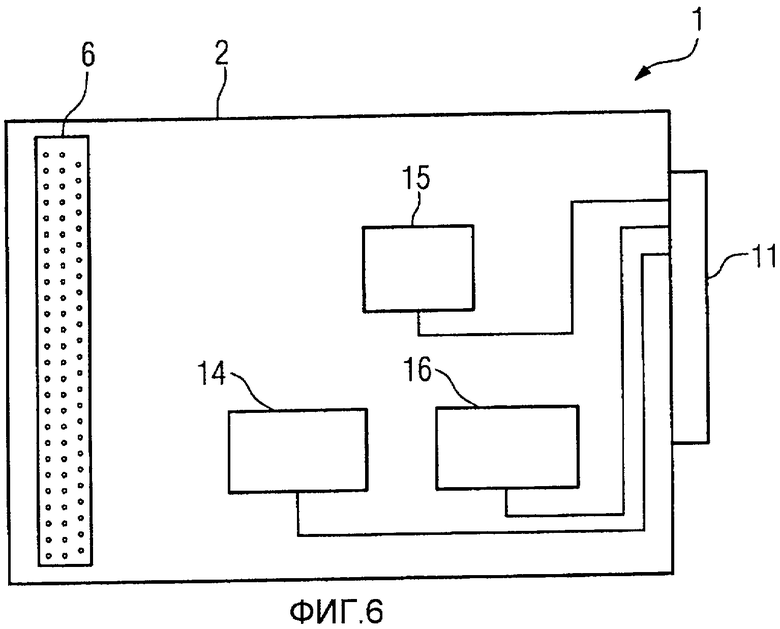
Фиг.6 - блок-схема обратной стороны схемной платы средства маршрутизации по фиг.1.
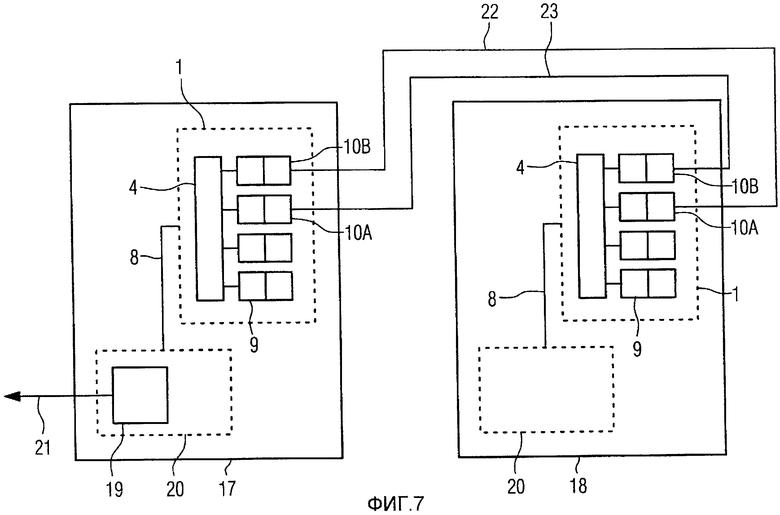
Фиг.7 - блок-схема двух соединенных с избыточностью подводных блоков управления.
Фиг.8 - сетевая топология с избыточностью подводных блоков управления.
На всех чертежах соответствующие элементы обозначены идентичными ссылочными позициями.
Средство 1 маршрутизации, показанное на виде спереди на фиг.1, представляет собой одну печатную схемную плату 2, содержащую микроконтроллер 3, программируемую пользователем матрицу 4 логических элементов и четыре ресурса 5 маршрутизатора рядом с двойным D-Sub штепсельным разъемом 6. Штепсельный разъем 6 размещен на схемной плате 2, включая в себя иллюстративную 104-штырьковую вилку на одной стороне схемной платы 2 и соответствующее гнездо на другой стороне. Например, это наращиваемый соединитель шины согласно стандарту РС104. Это позволяет компоновать в стопку плату 2 средства маршрутизации вместе с другими платами с тем же типом разъема. Такая стопка плат требует минимального пространства в подводном электронном модуле 7 подводного блока управления (не показан).
Схемная плата 2 имеет формат, например, согласно стандарту РС104. Через штепсельный разъем 6 она может быть соединена с шиной 8 управления подводного электронного модуля (не показан), в частности, с основным блоком управления (не показан) такого модуля. Шина 8 управления является 8-битовой шиной ISA (архитектура шины промышленного стандарта) в показанном примере. Альтернативно, она может быть, например, расширенной шиной ISA, шиной PCI или шиной IEEE 1394. Однако средство 1 маршрутизации может также использоваться отдельно, без укладки в стопку. Для этой цели оно может альтернативно соединяться с подводным электронным модулем 7 через шину согласно стандарту I2C. Средство 1 маршрутизации, в частности, микроконтроллер 3, может также соединяться с подводным электронным модулем через последовательный интерфейс RS-232 (не показан) для доступа в целях технического обслуживания. Плата средства 1 маршрутизации, т.е. схемная плата 2, может также использоваться в автономном режиме работы без использования стека PC104. Однако, если присутствует соединение РС 104, источник питания для средства 1 маршрутизации доступен от него. Можно использовать также другие источники питания, в частности, в автономном режиме работы.
Каждый ресурс 5 маршрутизатора содержит один полудуплексный локальный приемопередатчик 9 для дифференциальной последовательной шины и один полудуплексный удаленный приемопередатчик 10 для дифференциальной последовательной шины. Дифференциальная последовательная шина является в изображенном примере шиной RS-485 PROFIBUS DP. Альтернативно, она может быть, например, шиной CAN. Также возможно использовать полнодуплексные приемопередатчики 9, 10. Подводный электронный блок 7 может иметь подчиненный компонент дифференциальной последовательной шины, соединенный с главным компонентом на поверхности, а также он может предусматривать один или более индивидуальных главных компонентов дифференциальной последовательной шины, которые имеют отдельные подчиненные компоненты, связанные с их ресурсами 5 маршрутизатора.
Удаленные приемопередатчики 10 гальванически изолированы от остальных частей средства 1 маршрутизации, в частности, от локальных приемопередатчиков 9. Они снабжены активными средствами согласованной нагрузки шины (не показаны на этом чертеже) и средствами смещения (не показаны на этом чертеже). Каждый удаленный приемопередатчик 10 соединен с различными выводами одной 44-штырьковой вилки 11, обеспечивающей все внешние соединения. В частности, внешние шинные элементы для дифференциальной последовательной шины могут быть соединены через различные выводы вилки 11. Вилка 11 может быть использована для соединения RS-232 с последовательным портом внешнего РС, в частности, в автономном режиме работы средства 1 маршрутизации.
Локальные приемопередатчики 9 соединены с отдельными шинными портами программируемой пользователем матрицы 4 логических элементов. Каждый удаленный приемопередатчик 9 запитывается соответствующим преобразователем постоянного тока в постоянный ток (не показан на этом чертеже), который отдельно может отсоединяться программируемой пользователем матрицей 4 логических элементов. Обычно преобразователь постоянного тока в постоянный ток приводится в действие, только если удаленный шинный элемент соединен с соответствующим ресурсом 5 маршрутизатора, чтобы сэкономить мощность питания.
Возможными шинными элементами, которые могут быть соединены с выводами вилки 11, являются, например, другие подводные блоки управления, например, их электронные модули 7 или датчики (не показаны на этом чертеже), способные выдавать свои данные процесса по дифференциальной последовательной шине. Такие датчики предпочтительно развернуты вне подводного блока управления, например, в арматурах скважин или на трубопроводах. Датчики могут быть, например, датчиками морской воды, датчиками давления или датчиками температуры. Эти датчики контролируют нефте/газо/водный процесс производства.
Микроконтроллер 3 и программируемая пользователем матрица 4 логических элементов непосредственно связаны с шиной 8 управления, посредством которой они доступны, например, из основного блока управления подводного электронного модуля 7, в который вставлена плата средства 1 маршрутизации посредством штепсельного разъема 6. Микроконтроллер 3 служит для установки РС104 адреса в регистре в программируемой пользователем матрице 4 логических элементов и для разрешения РС104 доступа к программируемой пользователем матрице 4 логических элементов. Он дополнительно служит для считывания и записи всех регистров программируемой пользователем матрицы 4 логических элементов и сохранения предварительно определенных условий статуса. Это позволяет вводить предварительно определенный статус после включения питания.
Программируемая пользователем матрица 4 логических элементов имеет программно-аппаратную реализацию всей логики для декодирования РС104 интерфейса. Она содержит физические регистры для команд и откликов. Логика маршрутизатора полностью реализована в программируемой пользователем матрице 4 логических элементов. Имеется четыре экземпляра этой логики в программируемой пользователем матрице 4 логических элементов, каждая из которых соответствует одному из ресурсов 5 маршрутизатора, причем они управляются битами в регистрах команд. Четыре бита в регистре управления маршрутизатора в программируемой пользователем матрице 4 логических элементов включают/отключают ресурсы 5 маршрутизатора. Если один из битов равен нулю, соответствующий ресурс 5 маршрутизатора не будет пропускать данные с любого из направлений. Если программируемая пользователем матрица 4 логических элементов обнаруживает ошибку аппаратных средств в дифференциальной последовательной шине, она автоматически отключает соответствующий ресурс 5 маршрутизатора.
Пакет данных, поступающий в программируемую пользователем матрицу 4 логических элементов либо по шине 8 управления, т.е. от основного блока управления подводного электронного модуля, либо от одного из ресурсов 5 маршрутизатора, т.е. от внешнего источника, маршрутизируется программируемой пользователем матрицей 4 логических элементов в соответствующее место назначения шины, указанное в заголовке пакета данных. Для передачи по шине 8 управления пакеты данных дифференциальной последовательной шины упаковываются в пакеты шины 8 управления. Программируемая пользователем матрица 4 логических элементов ответственна за упаковку/распаковку соответствующих пакетов данных, маршрутизируемых к/от шины 8 управления. Так как ресурсы 5 маршрутизатора соединены с индивидуальными портами программируемой пользователем матрицы 4 логических элементов, средство 1 маршрутизации работает как коммутатор, приводя в результате к минимальным коллизиям в шине.
Все ресурсы 5 маршрутизатора могут работать с переменными битовыми скоростями от 9600 бит/с до 10 Мбит/с. Программируемая пользователем матрица 4 логических элементов обеспечивает прозрачную битовую скорость с малой задержкой. Она прослушивает трафик в обоих концах. Сторона, которая обнаруживает трафик первой, соединяется с другой стороной. И поскольку каждый приемопередатчик 9, 10 требует двух микросекунд для выключения своего приемника и включения своего передатчика, программируемая пользователем матрица 4 логических элементов задерживает битовый поток пакета данных на две микросекунды сдвиговым регистром (не показан).
Отдельные ресурсы 5 маршрутизатора могут обслуживать различные секции подчиненной сети с одинаковыми или отличающимися скоростями передачи, т.е. битовыми скоростями. В PROFIBUS DP сети DP главный компонент всегда определяет скорость передачи для всех DP подчиненных компонентов, которые соединены с этим DP главным компонентом. Основной канал связи - это тот, в котором DP главный компонент расположен на поверхности. Этот DP главный компонент на поверхности управляет DP скоростью и параметрами шины DP протокола, которые распространяются ко всем подсоединенным подводным DP подчиненным компонентам вслед за последовательностью запуска DP главного компонента.
Максимальная битовая скорость дифференциальной последовательной шины определяется различными характеристиками кабеля и длиной различных кабелей в каждой сети дифференциальной последовательной шины. Выбранная битовая скорость устанавливается вручную инженером-исследователем при установке конфигурации шины главного компонента. Последовательный перезапуск главного компонента активируется, и соединенные подчиненные компоненты, включая каналы маршрутизатора, будут отвечать в соответствии с новой скоростью передачи DP главного компонента. Если для инженера-исследователя затруднительно планировать скорость передачи, то главный компонент может конфигурироваться с увеличенной битовой скоростью шины с последующими новыми установками линий в исходное состояние. Таким путем возможно найти наивысшую возможную битовую скорость для каждой сети дифференциальной последовательной шины. Эта процедура используется в планируемой деятельности по пуску в эксплуатацию перед полным запуском системы.
В специальных вариантах осуществления, обеспечивающих коммуникацию по линии питания посредством модемов линии питания, модем линии питания может выдать отсчет максимальной возможной битовой скорости через интерфейс диагностики, после того как инициализация модема завершена. Инженер-исследователь может использовать эту информацию для установки наивысшей возможной битовой скорости дифференциальной последовательной шины в установке конфигурации шины главного компонента.
С помощью средства 1 маршрутизации можно заменить четыре традиционные карты маршрутизатора. Таким образом, потребление мощности, а также потребности в пространстве для размещения сокращаются примерно до одной четверти по сравнению с предшествующим уровнем техники. Битовая скорость передачи является переменной, позволяя достичь максимальной скорости передачи данных по шине для каждой индивидуальной подводной установки в зависимости от ситуации окружающей среды. Кроме того, вследствие согласованной нагрузки шины, смещения и гальванической изоляции, средство 1 маршрутизации является нечувствительным к внешним возмущениям, таким как разрыв подводных кабелей или внешние короткие замыкания.
Средство 1 маршрутизации, показанное на фиг.2, подобно тому, которое показано на фиг.1, за исключением того, каким образом ресурсы 5 маршрутизатора соединены с программируемой пользователем матрицей 4 логических элементов. Все локальные приемопередатчики 9 соединены с программируемой пользователем матрицей 4 логических элементов параллельно. Следовательно, средство 1 маршрутизации работает как концентратор, что касается ресурсов 5 маршрутизатора. Это означает, что все входящие пакеты данных распределяются всем ресурсам 5 маршрутизатора. Однако не все пакеты данных, поступающие от ресурсов 5 маршрутизатора, маршрутизируются к шине 8 управления. Только пакеты данных, имеющие место назначения на шине 8 управления или за ней, например, в станции управления на поверхности, маршрутизируются к ней.
Фиг.3 показывает один из ресурсов 5 маршрутизатора в форме блок-схемы. Локальный приемопередатчик 9 размещен на правой стороне и соединен с программируемой пользователем матрицей 4 логических элементов. Удаленный приемопередатчик 10 размещен на левой стороне. Три оптрона 12 обеспечивают гальваническую развязку для удаленного приемопередатчика 10. Плавающая мощность для удаленного приемопередатчика 10 поставляется преобразователем 13 постоянного тока в постоянный ток. Локальный приемопередатчик 9 связан с заземлением подводного электронного модуля 7. Приемопередатчики 9, 10 спроектированы на максимальную битовую скорость 10 Мбит/с. Оптроны спроектированы на максимальную битовую скорость 25 Мбит/с.
Каждый ресурс 5 маршрутизатора имеет детектор ошибок (не показан), который контролирует уровни входящего напряжения как на локальной стороне, так и на удаленной стороне. Если напряжения двух линий одной стороны отличаются более чем на предварительно определенное разностное значение, более чем 10 битов при самой низкой битовой скорости 9600 бит/с, то соответствующий ресурс 5 маршрутизатора отключается. Один из восьми битов статуса в регистре статуса маршрутизатора в программируемой пользователем матрице 4 логических элементов устанавливается для указания, в каком ресурсе 5 маршрутизатора и на какой стороне (локальной/удаленной) обнаружена проблема. Путем записи '1' в бит статуса, указывающий ошибку, ошибка очищается, и соответствующий детектор ошибки переустанавливается.
Соответствующий бит управления в регистре управления маршрутизатора программируемой пользователем матрицы 4 логических элементов соответствует каждому преобразователю 13 постоянного тока в постоянный ток. Если бит равен нулю, соответствующий преобразователь 13 постоянного тока в постоянный ток отсоединяется, в противном случае он активизируется. Поэтому мощность может экономиться за счет того, что включается только преобразователь 13 постоянного тока в постоянный ток, имеющий в текущий момент присоединенный другой элемент шины.
После того как средство 1 маршрутизации включено или переустановлено, главный компонент дифференциальной последовательной шины запускает свою инициализацию и переносит скорость шины и параметры шины ко всем подчиненным компонентам шины по этой сети через соответствующие каналы маршрутизатора. Микроконтроллер 3 может определить максимальную битовую скорость передачи по дифференциальной последовательной шине.
Конфигурация включения питания средства 1 маршрутизации независимо управляется для каждого канала маршрутизатора, то есть ресурса 5 маршрутизатора. Условие запуска по умолчанию соответствует состоянию, когда преобразователь 13 постоянного тока в постоянный ток включен, и ресурсы 5 маршрутизатора активированы. Важно активировать главный компонент дифференциальной последовательной шины для достижения подчиненных компонентов дифференциальной последовательной шины после включения питания системы. Ресурсы 5 маршрутизатора будут просто адаптироваться к скорости передачи, определенной главным компонентом дифференциальной последовательной шины, и ресурсы 5 маршрутизатора будут обеспечивать адаптацию к этой скорости. Каждый подчиненный компонент дифференциальной последовательной шины будет принимать битовую скорость дифференциальной последовательной шины, определенную главным компонентом дифференциальной последовательной шины, в качестве первой части последовательности запуска линии. Главный компонент дифференциальной последовательной шины предварительно конфигурируется с адресами подчиненных компонентов дифференциальной последовательной шины для всех подчиненных компонентов дифференциальной последовательной шины по этой дифференциальной последовательной шине.
Фиг.4 показывает контактные площадки Pxi (x=1, 2; i=1, 2, 3) на обеих линиях S1, S2 дифференциальной последовательной шины перед удаленным приемопередатчиком 10. Все локальные и удаленные приемопередатчики 9, 10 имеют сходные контактные площадки перед ними, следующие одному и тому же шаблону. Они позволяют конфигурировать электрический режим соответствующего приемопередатчика 9, 10 путем соответствующего монтажа контактных площадок. Вместо монтажа могут использоваться перемычки, если контактные площадки соответствующим образом снабжены выводами. Без какого-либо монтажа между контактными площадками не будет иметь места совсем никакой согласованной нагрузки и никакого смещения. Соединение контактной площадки Р11 с Р12, а также Р21 с Р22 приводит в результате к активной согласованной нагрузке 220 Ом. Соединение вместе контактных площадок Р11, Р12 и Р13, а также Р21, Р22 и Р23 приводит в результате к активной согласованной нагрузке 220 Ом и смещению. Однако, как правило, подводные кабели PROFIBUS DP должны всегда быть нагружены на обоих концах. Хотя это приведет в результате к потреблению мощности более высокому, чем необходимо для коротких кабелей, входы приемопередатчиков 9, 10 защищены от пробоя вследствие перенапряжения.
На фиг.5 показан схематичный вид сбоку схемной платы 2, содержащей средство 1 маршрутизации на своей верхней стороне. На второй стороне размещены три специализированных интерфейса 14, 15 и 16 ввода/вывода, а именно, цифровой интерфейс 14 ввода, цифровой интерфейс 15 вывода и аналоговый интерфейс 16 ввода. Каждый интерфейс 12, 13, 14 имеет множество портов для сбора и вывода данных процесса соответственно.
Интерфейсы 14, 15, 16 ввода/вывода можно лучше видеть на фиг.6, где показано схематичное изображение обратной стороны схемной платы 2. Размещение средства 1 маршрутизации и интерфейсов 14, 15, 16 ввода/вывода на обеих сторонах одной схемной платы 2 приводит к дополнительному снижению потребления мощности и требуемого пространства, так как в известном уровне техники для этой цели требовались три отдельные платы ввода/вывода. С помощью средства 1 маршрутизации согласно данному примеру, требуемое число плат может быть уменьшено с четырех (две стандартные платы интерфейса ввода/вывода, одна плата маршрутизатора, одна заказная плата ввода/вывода) до одной.
Интерфейсы ввода/вывода обеспечивают универсальную связность для источников цифровых и/или аналоговых данных процесса. Источники цифровых/аналоговых сигналов могут быть подсоединены к портам 11. Основной блок управления (не показан на этом чертеже) подводного электронного модуля (не показан на этом чертеже) получает доступ к интерфейсам 14, 15, 16 ввода/вывода через шину 8 управления и микроконтроллер 3, с которым соединены интерфейсы 14, 15, 16. В противоположность ресурсам 5 маршрутизатора, они не соединены непосредственно с шиной 8 управления.
Цифровой интерфейс 14 ввода может быть использован, например, для сбора данных статуса реле, в частности, коммутаторов и силовых реле, или статуса схем восприятия мощности питания. Цифровой интерфейс 15 вывода может быть использован, например, для установки/очистки статуса такого реле, в частности, повторной установки мощности питания интерфейса удаленного датчика. Аналоговый интерфейс 16 ввода может быть использован, например, для значений, получаемых в результате контроля изоляции подводных электрических кабелей или измерения давления или измерения температуры внутри подводного блока управления или трубопровода. Например, контроль изоляции подводных кабелей питания и дифференциальной последовательной шины может привести в результате к аналоговым напряжениям, соответствующим значениям сопротивления в диапазоне от 100 кОм до 18 Мом. Если изоляция повреждена, значение сопротивления будет заметно падать. Это может быть обнаружено посредством микроконтроллера 3 в оцифрованных значениях напряжения, причем соответствующий ресурс (не показан на этом чертеже) маршрутизатора может быть отключен. Аналоговый интерфейс 16 ввода содержит иллюстративный 16-битовый аналого-цифровой преобразователь. Все входные значения буферизуются для микроконтроллера 3, чтобы считывать их и подвергать дальнейшей обработке. Например, микроконтроллер 3 может отвечать цифровыми /оцифрованными значениями на запросы на временной основе станции управления на поверхности, либо он может сам контролировать значения и сообщать только об отклонениях от предварительно определенных допустимых интервалов значений.
Цифровые/оцифрованные значения могут сохраняться в регистрах программируемой пользователем матрицы 4 логических элементов (не показана на этом чертеже) в форме различных кольцевых контуров посредством микроконтроллера 3. Отсюда значения могут считываться другими элементами шины, в частности, станцией управления на поверхности (не показана на этом чертеже).
На фиг.7 показан резервируемый способ для соединения двух подводных электронных модулей 17, 18. Оба подводных электронных модуля 17, 18 содержат соответствующее средство 1 маршрутизации согласно изобретению. Они включают в себя четыре ресурса 5 маршрутизатора каждый. Первый подводный электронный блок 17 содержит модем 19 подводной линии питания в его основном блоке 20 управления. Модем 19 линии питания соединен с линией 21 питания, ведущей к станции управления на поверхности (не показана на этом чертеже).
Избыточность реализуется путем соединения подводных блоков 17, 18 управления двумя линиями 22, 23 дифференциальной последовательной шины. Первая линия 22 дифференциальной последовательной шины соединена с удаленными приемопередатчиками 10А подводных электронных модулей 17, 18. Вторая линия 23 дифференциальной последовательной шины соединена с вторыми удаленными приемопередатчиками 10В подводных электронных модулей 17, 18. Любые пакеты данных, возникающие или поступающие на один из подводных электронных модулей 17, 18, затем маршрутизируются параллельно через обе линии 22, 23 дифференциальной последовательной шины.
Фиг.8 показывает другой способ реализации избыточности в подводной сети. Несколько подводных блоков управления (не показаны), каждый из которых содержит подводный электронный модуль 7, имеющий средство 1 маршрутизации, формируют подводную топологию замкнутого кольца. Один подводный электронный модуль 7М содержит модем 19 подводной линии питания. Подводные электронные модули 7 соединены последовательно через множество линий 22 дифференциальной последовательной шины, проходящих от соответствующего первого удаленного приемопередатчика 10А к соответствующему второму удаленному приемопередатчику 10В. Если эта кольцевая топология прервана в одном месте, независимо от того, имеет ли место повреждение подводного электронного модуля 7 или разрыв или разрез кабеля линии 22 дифференциальной последовательной шины, маршрутизируемые пакеты данных по-прежнему будут достигать всех функциональных подводных электронных модулей 7.
Датчик 24 морской воды для измерения температуры трубопровода (не показан) соединен с удаленным приемопередатчиком 10 подводного электронного модуля 7Х. Так как он является элементом PROFIBUS DP, станция 25 управления на поверхности принимает значения процесса, измеренные датчиком 24 морской воды. Все пакеты данных передаются через линию 21 питания на подводный электронный модуль 7М и затем автоматически маршрутизируются по кольцевой топологии PROFIBUS DP к подводному электронному модулю 7Х с помощью средства 1 маршрутизации. Ресурсы 5 маршрутизации могут также включать в себя отдельные интерфейсы шины CAN к подводным датчикам, например, таким как датчик 24 морской воды.
| название | год | авторы | номер документа |
|---|---|---|---|
| СРЕДСТВО МАРШРУТИЗАЦИИ ДЛЯ ПОДВОДНОГО ЭЛЕКТРОННОГО МОДУЛЯ | 2006 |
|
RU2427963C2 |
| КОМПОНОВКА СХЕМЫ ДЛЯ КИП-СИСТЕМЫ БЕЗОПАСНОСТИ | 2015 |
|
RU2703221C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОННЫМ УСТРОЙСТВОМ И ЭЛЕКТРОННОЕ УСТРОЙСТВО | 2006 |
|
RU2419823C2 |
| МУЛЬТИСЕРВИСНЫЙ ТЕЛЕКОММУНИКАЦИОННЫЙ КОМПЛЕКС | 2023 |
|
RU2833335C1 |
| СПОСОБ АГРЕГАЦИИ НЕСКОЛЬКИХ КАНАЛОВ ПЕРЕДАЧИ ДАННЫХ В ЕДИНЫЙ ЛОГИЧЕСКИЙ КАНАЛ ПЕРЕДАЧИ ДАННЫХ ДЛЯ ПРЕДОСТАВЛЕНИЯ УСЛУГ ШИРОКОПОЛОСНОЙ ПЕРЕДАЧИ ДАННЫХ МАССОВОМУ ПОТРЕБИТЕЛЮ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2016 |
|
RU2631972C1 |
| Система управления "умным поселком" | 2023 |
|
RU2809474C1 |
| СПОСОБ И МОДЕМ ДЛЯ ПОДВОДНОЙ СВЯЗИ ПО ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2006 |
|
RU2407149C2 |
| МОБИЛЬНЫЙ УЗЕЛ СПУТНИКОВОЙ СВЯЗИ | 2007 |
|
RU2342787C1 |
| ПЕРЕДАЧА УПРАВЛЯЮЩИХ СЛУЖЕБНЫХ СИГНАЛОВ, ПОДДЕРЖИВАЮЩАЯ МНОГОПРИОРИТЕТНУЮ ДИСПЕТЧЕРИЗАЦИЮ | 2016 |
|
RU2714605C2 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА И ПЕРЕДАЧИ ДАННЫХ С ВОЗМОЖНОСТЬЮ ОСУЩЕСТВЛЕНИЯ ВЗАИМОДЕЙСТВИЯ С OpenFlow КОНТРОЛЛЕРОМ | 2014 |
|
RU2584471C1 |
Изобретение относится к средству (1) маршрутизации для подводного электронного модуля (7). Технический результат заявленного изобретения заключается в выполнении соединения между подводными электронными модулями с улучшенной надежностью. Средство (1) маршрутизации для подводного электронного модуля (7) содержит микроконтроллер (3), программируемую пользователем матрицу (4) логических элементов и, по меньшей мере, два ресурса (5) маршрутизации на одной схемной плате (2), причем каждый ресурс (5) маршрутизации содержит соответствующий локальный приемопередатчик (9) для дифференциальной последовательной шины и соответствующий удаленный приемопередатчик (10) для дифференциальной последовательной шины, причем каждый локальный приемопередатчик (9) соединен с соответствующим удаленным приемопередатчиком (10) и с упомянутой программируемой пользователем матрицей (4) логических элементов, которая способна маршрутизировать пакеты данных между упомянутыми ресурсами (5) маршрутизации. 2 н. и 20 з.п. ф-лы, 8 ил.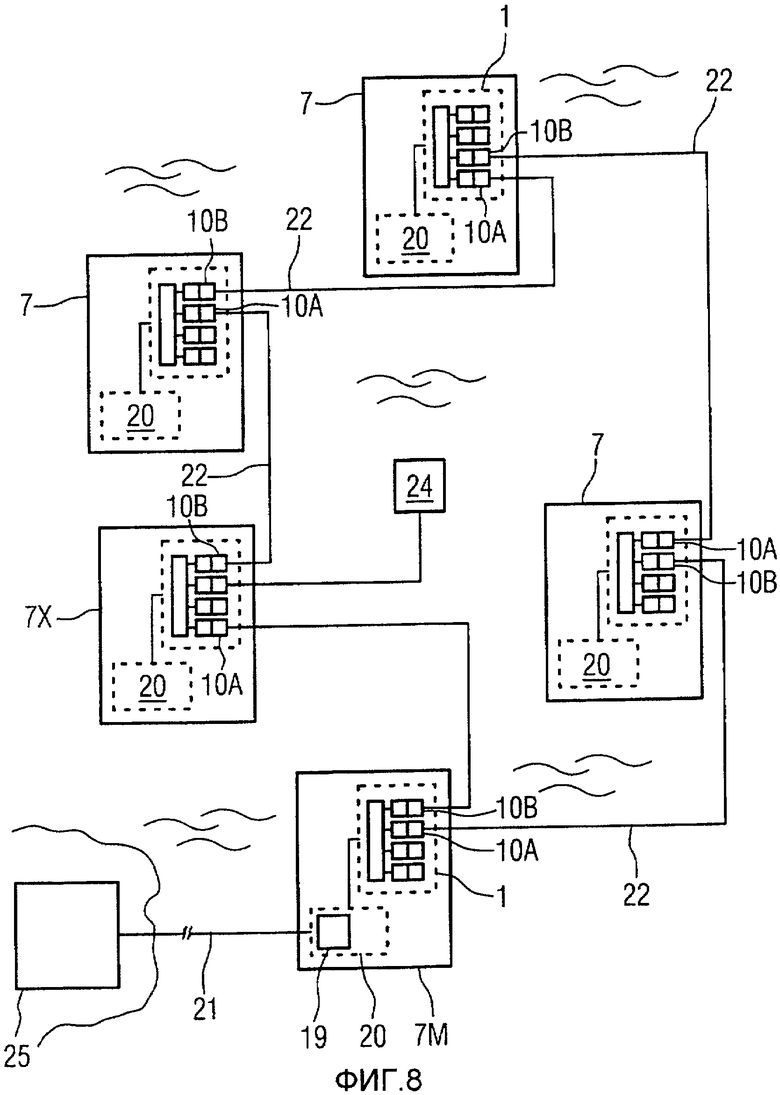
1. Средство (1) маршрутизации для подводного электронного модуля (7), содержащее микроконтроллер (3), программируемую пользователем матрицу (4) логических элементов и, по меньшей мере, два ресурса (5) маршрутизации на одной схемной плате (2), причем каждый ресурс (5) маршрутизации содержит соответствующий локальный приемопередатчик (9) для дифференциальной последовательной шины и соответствующий удаленный приемопередатчик (10) для дифференциальной последовательной шины, причем каждый локальный приемопередатчик (9) соединен с соответствующим удаленным приемопередатчиком (10) и с упомянутой программируемой пользователем матрицей (4) логических элементов, которая способна маршрутизировать пакеты данных между упомянутыми ресурсами (5) маршрутизации.
2. Средство (1) маршрутизации по п.1, содержащее всего точно четыре упомянутых ресурсов маршрутизатора.
3. Средство (1) маршрутизации по п.1, в котором каждый из упомянутых удаленных приемопередатчиков (10) является гальванически изолированным от соответствующего локального приемопередатчика (9).
4. Средство (1) маршрутизации по п.2, в котором каждый из упомянутых удаленных приемопередатчиков (10) является гальванически изолированным от соответствующего локального приемопередатчика (9).
5. Средство (1) маршрутизации по любому из предыдущих пунктов, в котором упомянутые удаленные приемопередатчики (10) являются плавающими, а упомянутые локальные приемопередатчики (9) соединены с локальным электрическим заземлением.
6. Средство (1) маршрутизации по любому из пп.1-4, в котором каждый из упомянутых удаленных приемопередатчиков (10) содержит активное средство согласованной нагрузки шины и средство смещения.
7. Средство (1) маршрутизации по п.5, в котором каждый из упомянутых удаленных приемопередатчиков (10) содержит активное средство согласованной нагрузки шины и средство смещения.
8. Средство (1) маршрутизации по любому из пп.1-4, в котором каждый из упомянутых удаленных приемопередатчиков (10) запитывается от соответствующего преобразователя (13) постоянного тока в постоянный ток.
9. Средство (1) маршрутизации по п.5, в котором каждый из упомянутых удаленных приемопередатчиков (10) запитывается от соответствующего преобразователя (13) постоянного тока в постоянный ток.
10. Средство (1) маршрутизации по п.8, в котором каждый из преобразователей (13) постоянного тока в постоянный ток является отдельно отсоединяемым.
11. Средство (1) маршрутизации по п.9, в котором каждый из преобразователей (13) постоянного тока в постоянный ток является отдельно отсоединяемым.
12. Средство (1) маршрутизации по любому из пп.1-4, в котором упомянутые локальные приемопередатчики (9) подсоединены параллельно.
13. Средство (1) маршрутизации по п.5, в котором упомянутые локальные приемопередатчики (9) подсоединены параллельно.
14. Средство (1) маршрутизации по любому из пп.1-4, в котором упомянутый микроконтроллер (3) и упомянутая программируемая пользователем матрица (4) логических элементов могут соединяться с основным блоком (20) управления подводного электронного модуля (7) через шину (8) управления.
15. Средство (1) маршрутизации по п.14, в котором упомянутая шина (8) управления может соединяться с основным блоком (20) управления через штепсельное соединение (6).
16. Средство (1) маршрутизации по любому из пп.1-4, в котором упомянутая одна схемная плата (2) содержит, по меньшей мере, один интерфейс (14, 15, 16) ввода/вывода для цифровых и/или аналоговых значений процесса.
17. Средство (1) маршрутизации по п.5, в котором упомянутая одна схемная плата (2) содержит, по меньшей мере, один интерфейс (14, 15, 16) ввода/вывода для цифровых и/или аналоговых значений процесса.
18. Средство (1) маршрутизации по любому из пп.1-4, в котором упомянутые ресурсы (5) маршрутизатора обеспечивают переменную битовую скорость передачи.
19. Средство (1) маршрутизации по п.5, в котором упомянутые ресурсы (5) маршрутизатора обеспечивают переменную битовую скорость передачи.
20. Средство (1) маршрутизации по п.18, в котором упомянутая программируемая пользователем матрица (4) логических элементов обеспечивает прозрачную битовую скорость с постоянной задержкой.
21. Средство (1) маршрутизации по п.19, в котором упомянутая программируемая пользователем матрица (4) логических элементов обеспечивает прозрачную битовую скорость с постоянной задержкой.
22. Подводный электронный модуль (7) для подводного блока управления, причем подводный электронный модуль (7) содержит средство (1) маршрутизации по любому из предыдущих пунктов.
| RU 2002130462 А, 10.05.2004 | |||
| WO 03001741 A1, 03.01.2003 | |||
| Вихревой пылеуловитель | 1980 |
|
SU975097A1 |

