Изобретение относится к контрольно-измерительной технике, в частности к преобразователям малых угловых перемещений, и может быть использовано в датчиках физических величин (деформации, давления, перемещения, ускорения, параметров вибрации и т.п.) для измерения физических величин в различных отраслях народного хозяйства и, в первую очередь, в условиях воздействия внешних дестабилизирующих факторов на изделиях ракетно-космической техники.
Известны волоконно-оптические датчики углового перемещения, содержащие волоконно-оптическую линию связи (ВОЛС) в виде излучающих и приемных оптических волокон, кодовый диск. Выходные торцы волокон расположены на уровне кодовых дорожек диска. По ВОЛС оптическое излучение от источника излучения поступает на линзу, на выходе которой формируется коллимированный поток световых лучей. Далее излучение подается на вход спектрально избирательной системы, разделяющей его на спектральные составляющие. Каждая составляющая фокусируется линзой на соответствующие разрядные дорожки диска с маской двоичного кода. После кодового диска промоделированный в зависимости от угла поворота диска световой поток фокусируется линзами в приемную часть ВОЛС для передачи к спектральному декодеру. По приемному волокну передается набор спектральных составляющих, каждая из которых несет информацию о соответствующем разряде кода углового положения диска [Гречишников В.М., Конюхов Н.Е. Оптоэлектронные цифровые датчики перемещений со встроенными волоконно-оптическими линиями связи. - М.: Энергоатомиздат, 1992. - 160 с.].
Основным недостатком указанных датчиков является то, что они предназначены для измерения больших угловых перемещений в плоскости, параллельной плоскости торцов оптических волокон, и не предназначены для измерения малых угловых перемещений в плоскости, в которой расположены продольные оси оптических волокон. Кроме того, необходима сложная юстировка волокон относительно кодовых дорожек диска.
Наиболее близким по конструктивному исполнению к предлагаемому изобретению является волоконно-оптический преобразователь перемещения, содержащий подводящие и отводящие оптические волокна, относительно общего торца которых на определенном расстоянии установлена перемещающаяся в соответствии с измеряемым перемещением поверхность с зеркальной и поглощающей частями, зеркальная часть выполнена в виде горизонтальной полосы высотой, равной диаметру сердцевины оптического волокна [Патент №2308677, МПK6 G01B 21/00. Волоконно-оптический преобразователь перемещения].
Недостатком указанного преобразователя является отсутствие возможности измерения малых угловых перемещений объектов, например перекрытий строительных объектов в процессе их эксплуатации.
Таким образом, в прототипе не достигается технический результат, выраженный в новых функциональных возможностях и простой технологии изготовления волоконно-оптических преобразователей. Предлагается новая конструкция волоконно-оптического преобразователя малых угловых перемещений, лишенная перечисленных выше недостатков.
Указанный технический результат достигается тем, что в известном волоконно-оптическом преобразователе углового перемещения (ВОПУП), содержащем подводящее и отводящие оптические волокна, относительно общего торца которых на расстоянии x0 установлена перемещающаяся на угол α отражающая поверхность, новым является то, что неподвижная линия отражающей поверхности расположена относительно оптической оси подводящего оптического волокна на расстоянии L, оптическая ось подводящего оптического волокна расположена относительно оптической оси отводящих оптических волокон на расстоянии D, причем конструктивные параметры связаны между собой выражением:

где rC, ΘNA - радиус сердцевины и апертурный угол оптического волокна соответственно.
В результате поиска по источникам патентной и технической информации не обнаружены устройства с совокупностью существенных признаков, совпадающих с предлагаемым изобретением и обеспечивающих заявляемый технический результат.
Таким образом, предлагаемое изобретение представляет собой техническое решение задачи, являющееся новым, промышленно применимым и обладающим изобретательским уровнем, т.е. предлагаемое изобретение отвечает критериям патентоспособности.
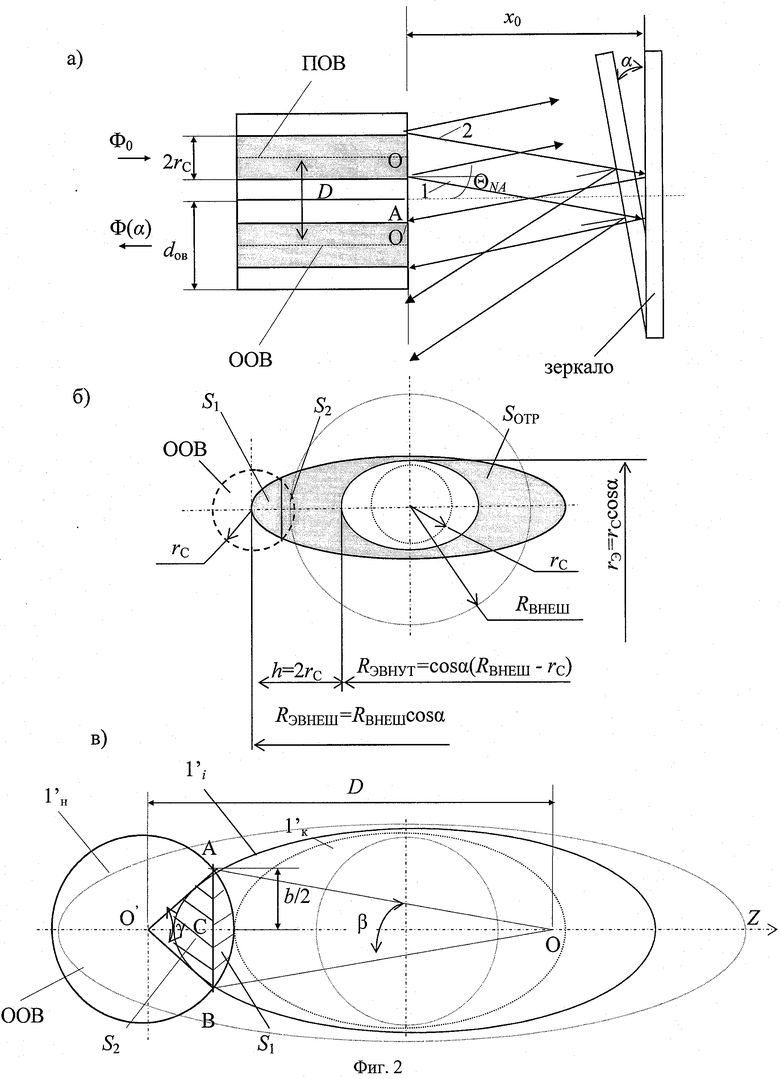
На фигуре 1 приведена расчетно-конструктивная схема предлагаемого ВОПУП, на фигуре 2 - поясняющие геометрические построения для вывода функции преобразования предлагаемого ВОПУП, на фигуре 3 - пример графической зависимости K=f(α).
ВОПУП содержит подводящее оптическое волокно (ПОВ) 1, отводящие оптические волокна (ООВ) 2, отражающую поверхность 3 (см. фиг.1). Оптическая ось ПОВ 1 расположена относительно оптической оси ООВ 2 на расстоянии D.
Отражающая поверхность 3 расположена относительно общего торца подводящего и отводящих оптических волокон ПОВ 1 и ООВ 2 на расстоянии X0. Линия защемления (или неподвижная линия) отражающей поверхности (на фиг.1 она перпендикулярна поверхности листа и обозначена точкой S) расположена относительно оптической оси ПОВ 1 на расстоянии L.
Конструктивные параметры ВОПУП связаны между собой выражением (1).
Модуляция интенсивности светового потока в предлагаемом ВОПУП, когда освещенная отражающая поверхность перемещается под углом α относительно торцов волокон, происходит следующим образом (фиг.2).
Когда отражающая поверхность не перемещается, лучи света (на фиг.2а габаритные лучи 1 и 2) от передающего оптического волокна ПОВ 1 проходят в прямом направлении путь х0 до отражающей поверхности и путь x0 в обратном направлении до отводящего оптического волокна ООВ 2 под апертурным углом ΘNA к оптической оси волокна (фиг.2а, в). При этом в плоскости приемного торца ООВ 2 наблюдается освещенная кольцевая зона шириной h=2rC, внешний радиус которой RВНЕШ.
Под действием измеряемой физической величины отражающая поверхность перемещается относительно общего торца ОВ под углом α.
При этом кольцевая зона преобразуется в эллипсоидную, которая смещается относительно ООВ в направлении Z. При этом изменяется площадь SПР приемного торца ООВ, освещенная отраженным от зеркала световым потоком, т.е. SПР=f(α) (см. фиг.2).
Таким образом, происходит преобразование:
Эллипсоидная зона имеет переменные полуоси, размер которых зависит от значения угла α.
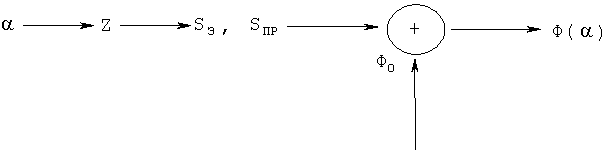
Отраженный световой поток Ф(α), изменяющийся в соответствии с законом изменения углового перемещения α, по ООВ 2 поступает на приемник излучения, где формируется электрический сигнал.
Функция преобразования Ф(α) имеет вид

где K(α) - коэффициент передачи тракта "ПОВ - отражающая поверхность, перемещающаяся под углом α, - ООВ";
Ф0 - световой поток, введенный в зону измерения.
Очевидно, что при Ф0=const вид функции преобразования Ф(α) будет определяться видом функции передачи оптического тракта, то есть коэффициента K(α), в диапазоне измерения.
Рассмотрим, как можно изменять вид функции преобразования K=f(α) с учетом геометрических построений, приведенных на фиг.2. Имеем
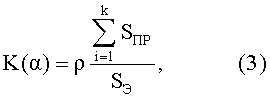
где ρ - коэффициент отражения поверхности;
 - суммарная площадь приемных торцов ООВ, освещенная отраженным от поверхности световым потоком;
- суммарная площадь приемных торцов ООВ, освещенная отраженным от поверхности световым потоком;
i=1…k - количество ООВ;
SЭ - площадь эллипсоидной зоны в плоскости приемных торцов ООВ.

Площади S1 и S2 представляют собой сектора, образованные взаимным пересечением окружности радиусом, равным радиусу rC сердцевины ООВ, и эллипса, образованного отраженными лучами в плоскости общего торца оптических волокон, большая полуось которого RЭ, а малая rЭ, и хорды AB длиной а. Большая полуось RЭ определяется выражением

а малая полуось определяется выражением

Если начальное положение отражателя x0 соответствует моменту, когда габаритные лучи 1 и 2 попадают на поверхность ООВ, а луч 1 в диапазоне измерения перемещается вдоль оси Z по поверхности приемного торца ООВ из положения 1'н в положение 1'к, соответствующие крайнему левому и крайнему правому положению луча 2 относительно внешней границы ООВ, то R=RЭВНЕШ (см. фиг.2а). В этом случае RЭ определяется выражением

Если начальное положение отражающей поверхности x0 соответствует моменту, когда габаритные лучи 1 и 2 попадают на поверхность ООВ, а луч 2 в диапазоне измерения перемещается вдоль оси Z по поверхности приемного торца ООВ из положения 2'н в положение 2'к, соответствующие крайнему левому и крайнему правому положению луча 2 относительно внешней границы ООВ, то R=RЭВНУТ (фиг.2, б). В этом случае RЭ определяется выражением

В соответствии с фиг.2 имеем


Но 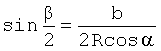 ,
, 
соответственно


С учетом выражений (9)-(10) выражение (4) примет вид:

В соответствии с фиг.2, в и известной формулой имеем:

где D=OO'.
Из треугольника AO'C

В соответствии с геометрическими построениями, приведенными на фиг.2:

где RЭВНЕШ, RЭВНУТ - внешний и внутренний диаметры эллипсоидной освещенной зоны в плоскости OOB 2;


Подставив выражения (16) и (17) в (15), получим:
SЭ=πrccos2α(2RВНЕШ-rc).
И с учетом того, что RВНЕШ=2x0tgΘNA,

Тогда выражение (3) с учетом выражений (18) и (13) перепишется как
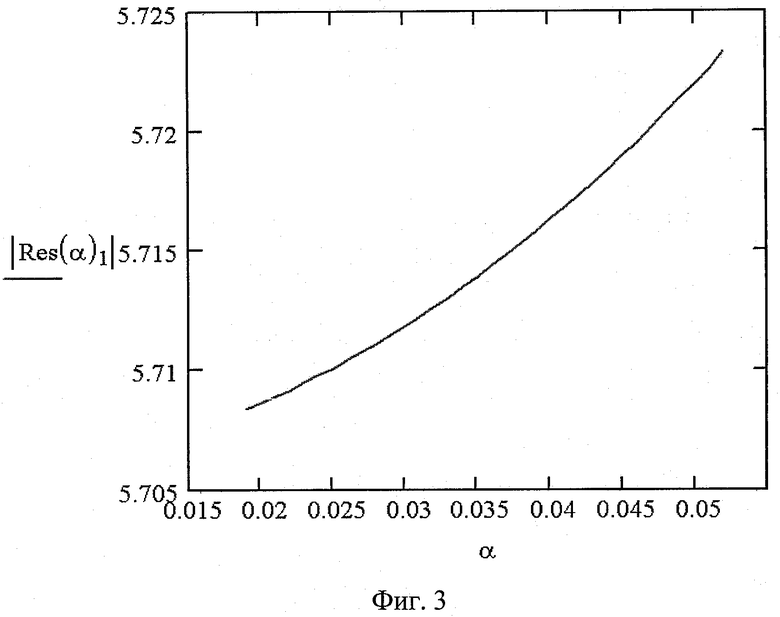
Пример графической зависимости K=f(α) приведен на фигуре 3.
Параметры b и R являются переменными, определяемыми выражениями (13) и (6) или (7) соответственно и зависящими от расстояния x0 от общего торца оптических волокон до отражающей поверхности 3, расстояния D между оптическими осями ПОВ 1 и ООВ 2. Изменяя тем или иным образом параметры b, D, x0 можно целенаправленно изменять вид функции K=f(α). Перечисленные параметры в свою очередь зависят от других параметров: расстояния L, диапазона изменения измеряемого параметра α (см. фиг.1). Управление конструктивными параметрами ВОПУП в данном случае обеспечивает максимальную чувствительность преобразования.
В соответствии с геометрическими построениями, приведенными на фиг.1, максимальной чувствительности преобразования можно добиться, если при угловом перемещении отражающей поверхности на угол α отраженный луч переместится на величину Zi из точки U в точку M в направлении Z.
Выразим нужные для расчета углы через α и ΘNA (см. фиг.1). Рассмотрим ΔRBA и ΔRBS:
Так как AB⊥BS и AR⊥RS, RB - общая сторона, то в прямоугольном треугольнике ΔRAS: ∠RAS=90-α; ∠BSR=α; ∠RAB=α.
Так как ∠RBS=90+ΘNA, то ∠BRS=90-ΘNA-α.
Рассмотрим ΔO'RQ:
∠O'RQ=δ; где δ - угол между перпендикуляром к отражающей поверхности и падающим на отражающую поверхность лучом;
δ=180-(90-ΘNA)-(90-α)=ΘNA+α.
Рассмотрим ΔRQM:
∠RQM=ψ, где ψ - угол между перпендикуляром к отражающей поверхности и горизонтальной плоскостью;
ψ=180-(90-α)=90+α.
Находим угол γ между отраженным лучом и горизонтальной плоскостью:
γ=180-δ-ψ=180-ΘNA-α-90-α=90-ΘNA-2α.
Рассмотрим ΔUEM:
∠UEM=λ, где λ - угол между отраженными от отражающей поверхности лучами в крайних ее положениях;
λ=180-(90+ΘNA)-γ=180-90-ΘNA-90+ΘNA+2α=2α.
Рассмотрим ΔO'RM:
∠O'RM=2δ; ∠RO'M=90-Θ; ∠O'MR=γ,
 ;
;
 .
.
Подставляя последнее равенство в предыдущую формулу, получаем зависимость:

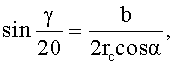
Из полученной формулы выражаем Zi, подставляя значения углов δ и γ:


Находим  :
:

Для дальнейших рассуждений удобно расстояние BS от вершины угла α до точки падения луча на отражающую поверхность обозначить через m:
m=L-FB-rc.
Из ΔO'FB: FB=x0tgΘNA
Подставляем значение FB в полученное выражение:

Находим  . Рассмотрим ΔRBS и ΔARB:
. Рассмотрим ΔRBS и ΔARB:

Из-за малости угла (не более 3 градусов) tgα≈α


Окончательно с учетом выражений (23) и (24):

Подставив в формулу (21) выражения (25) и (22), получим:

Подставляя равенство (25) в формулу (20), получаем зависимость (1).
Технический результат предлагаемого изобретения следующий.
Предложенная конструкция ВОПУП простая и технологичная при изготовлении, не требует сложных технологических, котировочных и измерительных операций при изготовлении, имеет дешевую компонентную базу, обеспечивает высокие чувствительность преобразования и точность измерения физических величин в условиях искро-, взрыво- и пожароопасности и воздействия сильных электромагнитных помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ДАВЛЕНИЯ | 2005 |
|
RU2308689C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ПАРАМЕТРОВ ЖИДКОСТНЫХ И ВОЗДУШНЫХ ПОТОКОВ | 2020 |
|
RU2741276C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2308677C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2308772C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ | 2007 |
|
RU2338155C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ВИБРАЦИИ | 2013 |
|
RU2537474C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ПРЕЛОМЛЕНИЯ ПРОЗРАЧНОГО ВЕЩЕСТВА И РЕАЛИЗУЮЩИЙ ЕГО ВОЛОКОННО-ОПТИЧЕСКИЙ РЕФРАКТОМЕТРИЧЕСКИЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2021 |
|
RU2796797C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2290605C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК РАЗНОСТИ ДАВЛЕНИЯ | 2013 |
|
RU2567176C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ СИГНАЛИЗАТОР УРОВНЯ ЖИДКОСТИ | 2005 |
|
RU2297602C1 |
Изобретение относится к контрольно-измерительной технике, в частности к преобразователям малых угловых перемещений, и может быть использовано в датчиках физических величин (деформации, давления, перемещения, ускорения, параметров вибрации и т.п.) для измерения физических величин в первую очередь в условиях воздействия внешних дестабилизирующих факторов на изделиях ракетно-космической техники. Новым в устройстве является то, что неподвижная линия отражающей поверхности расположена относительно оптической оси подводящего оптического волокна на расстоянии L, оптическая ось подводящего оптического волокна расположена относительно оптической оси отводящих оптических волокон на расстоянии D, причем конструктивные параметры связаны между собой выражением:

где rс, ΘNA - радиус сердцевины и апертурный угол оптического волокна соответственно, Х0 - расстояние, на котором установлена перемещающаяся на угол α отражающая поверхность. Технический результат - повышение функциональных возможностей, упрощение технологии изготовления волоконно-оптических преобразователей. 3 ил.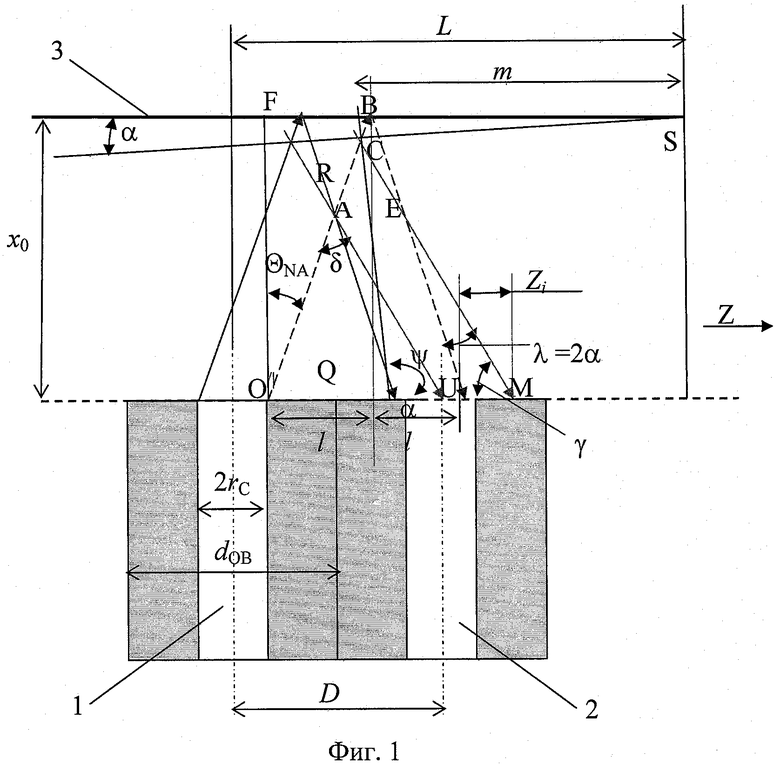
Волоконно-оптический преобразователь углового перемещения, содержащий подводящий и отводящие оптические волокна, относительно общего торца которых на расстоянии Х0 установлена перемещающаяся на угол α отражающая поверхность, отличающийся тем, что неподвижная линия отражающей поверхности расположена относительно оптической оси подводящего оптического волокна на расстоянии L, оптическая ось подводящего оптического волокна расположена относительно оптической оси отводящих оптических волокон на расстоянии D, причем конструктивные параметры связаны между собой выражением

где rc, ΘNA - радиус сердцевины и апертурный угол оптического волокна соответственно.
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2308677C2 |
| РАСТРОВО-КОДОВЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2027206C1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

