Изобретение относится к контрольно-измерительной технике и может быть использовано при измерении давления, перемещения, ускорения, параметров вибрации и т.п. в различных отраслях народного хозяйства и, в первую очередь, для измерения физических величин в условиях воздействия внешних дестабилизирующих факторов на изделиях ракетно-космической техники.
Известны волоконно-оптические датчики давления, содержащие световодные жгуты, установленные на фиксированном расстоянии от светоотражающей металлической мембраны, процесс измерения давления в которых осуществляется путем регистрации изменения интенсивности отраженного светового потока в зависимости от прогиба мембраны под действием давления [Жилин В.Г. Волоконно-оптические измерительные преобразователи скорости и давления. - М.: Энергоатомиздат, 1987. - с.11-12; Авдошин Е.С. Волоконная оптика в военной технике США // Зарубежная электроника, 1989. - №11. - с.98-99; а.с. 1631329 G01L 11/00. Датчик давления; Бусурин В.И., Носов Ю.Р. Волоконно-оптические датчики: Физические основы, вопросы расчета и применения. - М.: Энергоатомиздат, 1990. - с.40-41].
Недостатками данных датчиков являются:
- отсутствие возможности измерения перемещения, перпендикулярного общему торцу оптических волокон,
- сложность процедуры настройки датчика, предполагающей изменение начального расстояния между мембраной и общим торцом оптических волокон для обеспечения требуемой чувствительности преобразования и линейной функции преобразования,
- большая дополнительная погрешность, обусловленная изгибами оптических волокон.
Наиболее близким по способу преобразования измерительной информации к предлагаемому изобретению является устройство, в котором под воздействием переменного акустического поля свет модулируется тонкой шторкой из титановой фольги, прикрепленной к гибкой мембране. Свет от светодиода поступает через разветвитель по волоконному световоду в полость, где расположена шторка, модулированный свет по другому световоду направляется на фотодиод [Световодные датчики/ Б.А.Красюк, О.Г.Семенов, А.Г.Шереметьев и др. - М.: Машиностроение, 1990. - С.15].
Недостатками этого устройства являются низкая чувствительность преобразования из-за потерь светового потока в процессе передачи его от подводящих оптических волокон к отводящим оптическим волокнам в пределах апертурного угла оптических волокон. Расположение оптических волокон с двух сторон относительно шторки существенно увеличивает габаритные размеры устройства. Кроме того, данное устройство требует точной юстировки оптических волокон относительно друг друга и шторки, что снижает надежность устройства, усложняет технологию его изготовления и соответственно повышает его стоимость.
Наиболее близким по технической сущности к предлагаемому изобретению является волоконно-оптический преобразователь перемещения, содержащий сферическое зеркало, подводящий и отводящие оптические волокна, относительно общего торца которых на некотором расстоянии находится отражающая поверхность перемещающегося объекта [авторское свидетельство SU 1539519 A1, МКИ7 G01В 11/00. Волоконно-оптический преобразователь перемещений].
Недостатками этого преобразователя являются:
- отсутствие возможности измерения перемещения, перпендикулярного общему торцу оптических волокон,
- сложность процедуры настройки датчика, предполагающей изменение начального расстояния между отражающей поверхностью и общим торцом оптических волокон и точную установку общего торца оптических волокон относительно фокуса зеркала для обеспечения требуемой чувствительности преобразования и линейной функции преобразования,
- большая погрешность линейности, вызванная нелинейным изменением освещенной поверхности отводящего оптического волокна в диапазоне измерения;
- большая дополнительная погрешность, обусловленная изгибами оптических волокон под воздействием внешних механических факторов: ударов, вибраций.
Таким образом, в прототипе не достигается технический результат, выраженный в высоких метрологических характеристиках. Предлагается новая конструкция волоконно-оптического преобразователя перемещения, лишенная перечисленных выше недостатков.
Указанный технический результат достигается тем, что в известном волоконно-оптическом преобразователе перемещения, содержащем одно подводящее и два отводящих оптических волокна, перемещающуюся в вертикальном направлении Z поверхность с зеркальной и поглощающей частями, установленную на расстоянии ХО от общего торца оптических волокон и которая выполнена в виде горизонтальной полосы шириной b, оптические волокна расположены друг над другом в вертикальном направлении, горизонтальная ось зеркальной поверхности при Z=0 смещена относительно оптической оси подводящего оптического волокна на значение равное радиусу сердцевины rC оптического волокна, причем высота H и ширина b зеркальной поверхности определяются выражениями


где ΘNA - апертурный угол оптического волокна.
В результате поиска по источникам патентной и технической информации не обнаружены способы и устройства с совокупностью существенных признаков, совпадающих с предлагаемым изобретением и обеспечивающих заявляемый технический результат.
Таким образом, предлагаемое изобретение представляет собой техническое решение задачи, являющееся новым, промышленно применимым и обладающим изобретательским уровнем, т.е. предлагаемое изобретение отвечает критериям патентоспособности.
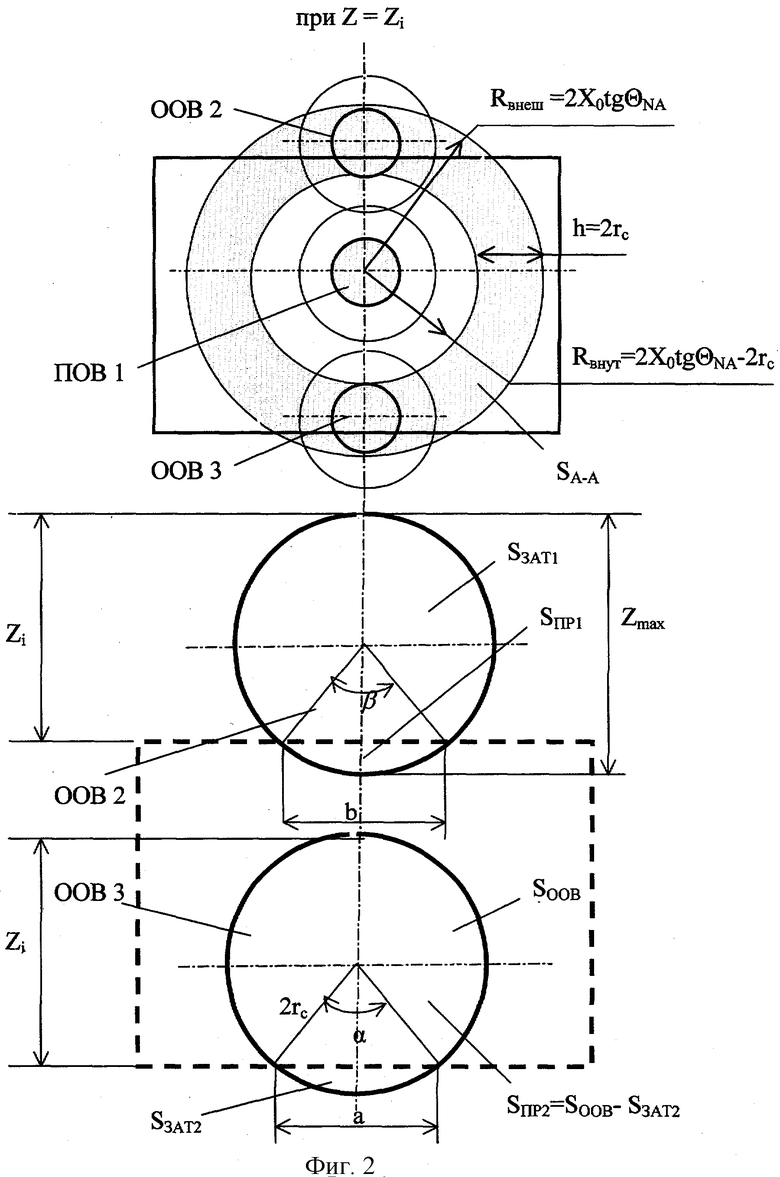
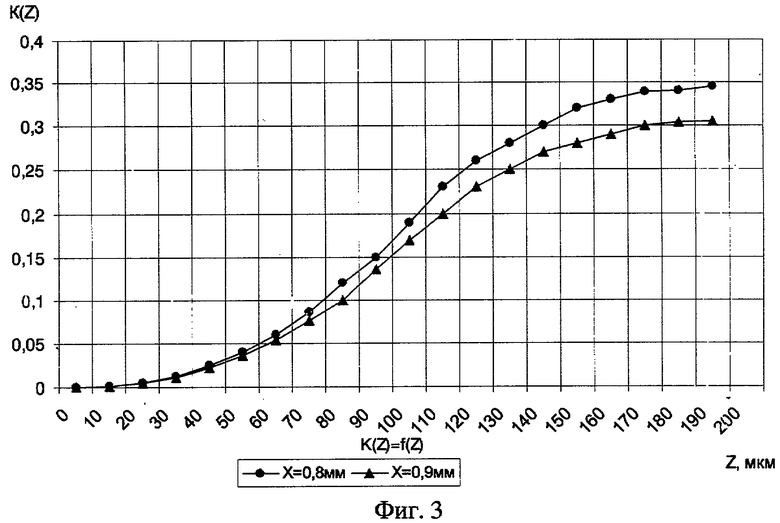
На фигуре 1 приведена расчетно-конструктивная схема предлагаемого преобразователя перемещения, на фигуре 2 - поясняющие геометрические построения, на фигуре 3 - пример расчетной зависимости KAT1/(Z) для перемещения аттенюатора с отражающей поверхностью в диапазоне Z=0...200 мкм при использовании оптических волокон с параметрами ΘNA=12 град, rс=100 мкм, dс=500 мкм, на фигуре 4 - упрощенная конструктивная схема одного из вариантов дифференциального волоконно-оптического датчика давления, включающего предлагаемый преобразователь перемещения.
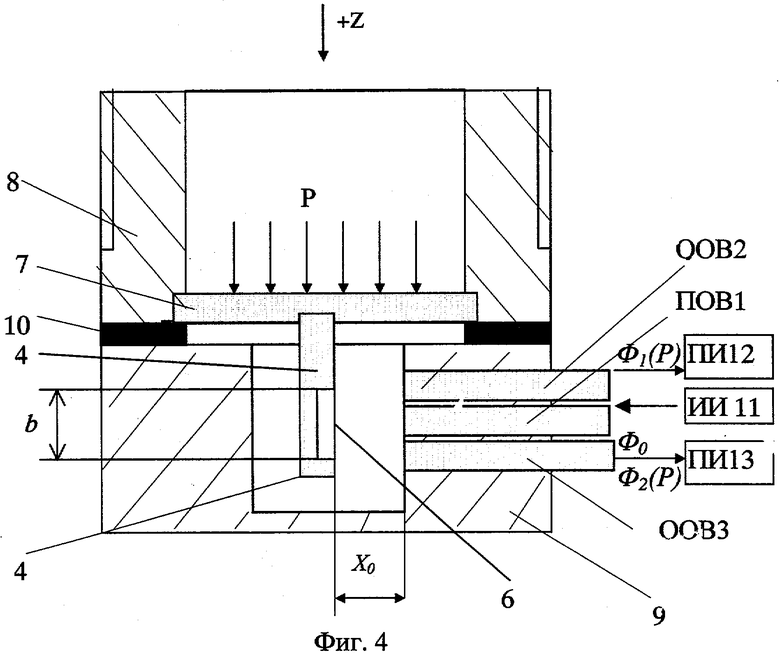
Волоконно-оптический преобразователь перемещения содержит подводящее оптическое волокно ПОВ 1, первое отводящее оптическое волокно ООВ 2, второе отводящее волокно ООВ 3, аттенюатор 4, имеющий поверхность с зеркальной 5 и поглощающей 6 частями (фигура 1). Аттенюатор 4 расположен на расстоянии Х0, относительно общего торца подводящих и отводящих оптических волокон ПОВ 1, ООВ 2 и ООВ 3.
Зеркальная часть 5 выполнена в виде горизонтальной полосы высотой Н и шириной b, определяемых выражениями (1) и (2) соответственно в соответствии с построениями, приведенными на фигурах 1 и 2. Горизонтальная ось зеркальной поверхности при Z=0 смещена относительно оптической оси подводящего оптического волокна ПОВ 1 на значение, равное радиусу сердцевины rс оптического волокна.
Световой поток Ф0 от подводящего оптического волокна ПОВ 1 проходит в прямом направлении расстояние Х0 до аттенюатора и расстояние Х0 в обратном направлении до отводящих оптических волокон ООВ 2 и ООВ 3 под апертурным углом ΘNA к оптической оси волокна (см. фиг.1). При этом в плоскости приемных торцов отводящих оптических волокон ООВ 2 и ООВ 3 наблюдается освещенная кольцевая зона SA-A шириной h=2rс, внешний и внутренний радиусы которой определяются выражениями (3) и (4) соответственно


где X0 - расстояние от аттенюатора до оптических волокон,
rс - радиус сердцевины волокон.
В нейтральном положении, когда измеряемый параметр соответствует начальной точке диапазона измерения при Z=0, аттенюатор установлен относительно общего торца оптических волокон таким образом, чтобы освещенная кольцевая зона SA-A полностью перекрывала поверхности SOOB отводящих оптических волокон.
Под действием измеряемой физической величины (например, давления) аттенюатор 4 перемещается на значение Z относительно ПОВ 1 и ООВ 2 и ООВ 3, что ведет к изменению интенсивности световых потоков Ф1(Z) и Ф2(Z), поступающих далее по отводящим волокнам ООВ 2 и ООВ 3 на приемники излучения (см. фиг.4).
При изменении измеряемого параметра аттенюатор 4 перемещается в направлении Z на Z=Zi. При этом изменяются освещенные отраженным световым потоком площади SПР1 и SПР2 приемных торцов ООВ 2 и ООВ 3 соответственно.
Задача управления световым потоком в пространстве волоконно-оптического преобразователя перемещения состоит в том, чтобы обеспечить требуемые функции преобразования Ф1(Z) и Ф1(Z), высокие чувствительности преобразования dФ1/d Z и dФ2/d Z.
Функция преобразования волоконно-оптического преобразователя перемещения зависит от способа модуляции оптического сигнала в зоне измерения. В волоконно-оптическом преобразователе перемещения с отражательным аттенюатором модуляция оптического сигнала осуществляется за счет изменения положения границы раздела поглощающей и отражающий поверхностей аттенюатора.
Функции преобразования Ф1(Z) и Ф2(Z) имеют вид:


где KAT1(Z), KAT2(Z) - коэффициенты передачи трактов «подводящее оптическое волокно ПОВ 1 - аттенюатор 4 - отводящее оптическое волокно ООВ 2» и «подводящее оптическое волокно ПОВ 1 - аттенюатор 4 - отводящее оптическое волокно ООВ 3» соответственно;
Ф0 - начальный световой поток на выходе ПОВ 1.
Очевидно, что при Ф0=const поведение функций преобразования Ф1(Z) и Ф2(Z) будет оцениваться по поведению функций передачи оптических трактов, то есть коэффициентов KAT1(Z) и KAT2(Z) в диапазоне измерения.
Рассмотрим, каким образом можно управлять поведением функции преобразования KAT1(Z) и KAT2(Z) с учетом геометрических построений, приведенных на фигурах 1 и 2. Имеем
где P - коэффициент отражения зеркальной поверхности аттенюатора;
SПР1, SПР2 - площади приемных торцов ООВ 2 и ООВ 3 соответственно, освещенные отраженным от зеркала световым потоком;
SA-A - площадь кольцевой зоны в плоскости приемных торцов ООВ;

где RВНЕШ, RВНУТ - внешний и внутренний диаметры кольцевой освещенной зоны в плоскости ООВ.
Подставив выражения (3) и (4) в (9), получим:

где Xo=D/2tgΘNA.
При D=2dОВ
тогда

SПР1 и SПР2 представляют собой круговые сектора, образованные взаимным пересечением круга радиусом rс и прямой АВ - хорды длиной а, соответствующей границе раздела отражающей и поглощающей поверхностей аттенюатора (см. фиг.2)
В соответствии с фиг.2 имеем
- при Zх=0...0,5Zmax или Zх=0...rс
SПР1=SООВ-SЗАТ1,
SПР2=SОCB2,
S3AT1=SOCB2,
- при Zx=0,5Zmax...Zmax или Zx=rс...2rс
SПР1=SOCB1,
Sпр2=SOOB-SЗAT2,
SЗAT2=SOCBl,
где SOOB - площадь поперечного сечения (приемного торца) ООВ;
SЗAT1, SЗАТ2 - затемненная поверхность приемного торца ООВ 2 и ООВ 3 (поверхность ООВ, на которую не попадает световой поток) соответственно;
SОСВ1, SОСB2 - освещенная поверхность приемного торца ООВ 2 и ООВ 3 соответственно.
- при Zx=0...rc


- при Zx=rc...2rc


Но 
 соответственно
соответственно

где

При Zmax=2rC
При а=b
С учетом выражений (16)-(18) выражения (14)-(15) примут вид
- при Zx=0...rс


При Zx=rс...2rс


Коэффициенты преобразования KAT1(Z) и KAT2(Z) с учетом выражений (11), (19)-(22) определятся следующим выражением:
При Zx=0...rс


При Zx=rс...2rс


Коэффициенты преобразования KAT1(Z) и KAT2(Z) зависят от параметров оптического волокна и от расстояния D между оптическими осями ПОВ 1 и ООВ 2 и ООВ 3.
В качестве примера на фигуре 3 приведен график зависимости КАТ1(Z) для перемещения аттенюатора с отражающей поверхностью в диапазоне Z=0...200 мкм и rс=100 мкм. Зависимости нелинейные. Существенная нелинейность наблюдается на участках 0...40, 160...200 мкм, поэтому диапазон перемещения аттенюатора относительно оптических волокон ограничен участком 40...160 мкм, то есть приблизительно равен 120 мкм. Относительное изменение интенсивности светового потока Ф1/Ф0=f(Z) в диапазоне измерения будет носить аналогичный характер.
Зависимость KAT2(Z) будет носить аналогичный характер зависимости KAT1(Z), но только обратный.
На фигуре 4 в качестве примера приведена упрощенная конструкция дифференциального волоконно-оптического датчика давления, в котором используется предлагаемый преобразователь.
Датчик содержит подводящее оптическое волокно ПОВ 1, первое отводящее оптическое волокно ООВ 2, второе отводящее волокно ООВ 3, аттенюатор 4, имеющий поверхность с зеркальной 5 и поглощающей 6 частями и жестко закрепленный на мембране 7. Мембрана 7 закреплена в штуцере 8, например, с помощью сварки. Оптические волокна жестко закреплены в корпусе 9 на расстоянии Х0 относительно рабочей поверхности аттенюатора 4. Для осуществления процесса юстировки оптических волокон относительно отражающей поверхности аттенюатора в конструкцию введена прокладка 10 переменной толщины. Корпус 9, прокладка 10 и штуцер 8 соединены между собой жестко, например, с помощью сварки.
Датчик работает следующим образом.
От источника излучения 11 (например, светодиода) по подводящему оптическому волокну ПОВ 1 световой поток Ф0 направляется в сторону аттенюатора 4. Под действием измеряемой физической величины аттенюатор 4 перемещается на величину Z относительно торцов отводящих оптических волокон ООВ 2 и ООВ 3, что ведет к изменению интенсивности световых потоков Ф1(Z) и Ф2(Z), поступающих по отводящим волокнам на светочувствительные площадки приемников излучения ПИ 12 и ПИ 13 (фотодиодов) первого и второго измерительных каналов соответственно. Приемники излучения преобразуют оптические сигналы в электрические I1 и I2, поступающие на вход блока преобразования информации (БПИ). В БПИ осуществляется операция деления сигналов I1 и I2, что позволяет компенсировать изменения мощности излучения светодиода и потери светового потока при изгибах оптических волокон, так как их отношение не зависит от указанных факторов, а также линеаризовать выходную зависимость. Для удвоения чувствительности преобразования можно сформировать отношение разности сигналов I1 и I2 к их сумме.
Технический результат предлагаемого изобретения следующий.
Предложенное устройство - волоконно-оптический преобразователь перемещения позволяет реализовать дифференциальную схему преобразования, что в два раза повышает чувствительность преобразования, позволяет добиться линейной функции преобразования, уменьшить погрешности, обусловленные изгибами оптических волокон под воздействием внешних дестабилизирующих факторов. Преобразователь имеет простую, надежную конструкцию, не требует сложных технологических, котировочных и измерительных операций при изготовлении оптической части, имеет дешевую компонентную базу: многомодовые оптические волокна. Соответственно, предлагаемое техническое решение не ведет к лишним материальным затратам.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2308677C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ДАВЛЕНИЯ | 2005 |
|
RU2308689C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВОГО ПЕРЕМЕЩЕНИЯ | 2008 |
|
RU2419765C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2290605C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ДАВЛЕНИЯ | 2024 |
|
RU2829195C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ СВЕТОВОГО ПОТОКА И РЕАЛИЗУЮЩИЙ ЕГО ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ДАВЛЕНИЯ | 2020 |
|
RU2740538C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК РАЗНОСТИ ДАВЛЕНИЯ | 2013 |
|
RU2567176C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ПАРАМЕТРОВ ЖИДКОСТНЫХ И ВОЗДУШНЫХ ПОТОКОВ | 2020 |
|
RU2741276C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ТЕМПЕРАТУРЫ | 2022 |
|
RU2795841C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ВИБРАЦИИ | 2013 |
|
RU2537474C1 |
Изобретение относится к контрольно-измерительной технике и может быть использовано в датчиках физических величин. Волоконно-оптический преобразователь перемещения содержит одно подводящее и два отводящих оптических волокна, перемещающуюся в вертикальном направлении Z поверхность с зеркальной и поглощающей частями, установленную на расстоянии Х0 от общего торца оптических волокон и которая выполнена в виде горизонтальной полосы. Оптические волокна расположены друг над другом в вертикальном направлении, горизонтальная ось зеркальной поверхности при Z=0 смещена относительно оптической оси подводящего оптического волокна на значение, равное радиусу сердцевины rC оптического волокна, причем высота Н и ширина b зеркальной части поверхности определяются выражениями.
H=2Xo2tgΘNA+rc,
b≥H,
где ΘNA - апертурный угол оптического волокна. Технический результат заключается в повышении метрологических характеристик. 4 ил.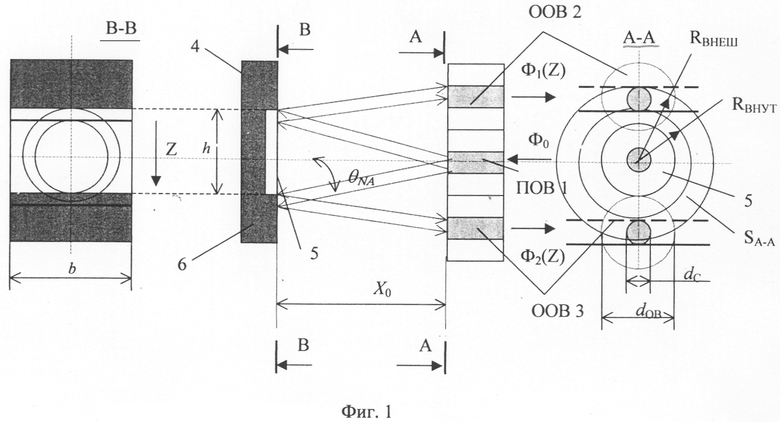
Волоконно-оптический преобразователь перемещения, содержащий одно подводящее и два отводящих оптических волокна, перемещающуюся в вертикальном направлении Z поверхность с зеркальной и поглощающей частями, установленную на расстоянии Х0 от общего торца оптических волокон и которая выполнена в виде горизонтальной полосы, отличающийся тем, что оптические волокна расположены друг над другом в вертикальном направлении, горизонтальная ось зеркальной поверхности при Z=0 смещена относительно оптической оси подводящего оптического волокна на значение равное радиусу сердцевины rC оптического волокна, причем высота Н и ширина b зеркальной части поверхности определяются выражениями
H=2Xo2tgΘNA+rc,
b≥H, (2)
где ΘNA - апертурный угол оптического волокна.
| Волоконно-оптический преобразователь перемещений | 1987 |
|
SU1539519A1 |
| Оптоэлектронный преобразователь перемещений | 1991 |
|
SU1825977A1 |
| Оптический датчик перемещений | 1986 |
|
SU1374046A1 |
| JP 62242805 A, 23.10.1987. | |||

