Изобретение относится к лифту с кабиной и устройством для определения положения кабины, а также к способу эксплуатации такого лифта в соответствии с формулой изобретения.
Известно определение положения кабины лифта с целью получения из этой информации сигналов управления, которые применяются для управления лифтом. В немецкой полезной модели DE 9210996 U1 раскрыто устройство для определения положения кабины с помощью магнитной ленты и магнитной головки для считывания магнитной ленты. Магнитная лента имеет магнитное кодирование и проходит вдоль всего пути прохождения кабины. Закрепленная на кабине магнитная головка считывает кодирование без соприкосновения с магнитной лентой. Из считываемых кодирований определяется положение кабины.
Модификация этого устройства раскрыта в патенте WO 03011733 A1, который представляет наиболее близкий уровень техники для данного изобретения. Согласно идее этого патента кодирование магнитной ленты состоит из множества расположенных последовательно кодовых меток. Кодовые метки магнетизированы либо как южный полюс, либо как северный полюс. Несколько следующих друг за другом кодовых меток образуют кодовое слово. Кодовые слова в свою очередь расположены последовательно в виде рисунка кодовых меток с двоичным псевдослучайным кодированием. Таким образом, каждое кодовое слово представляет абсолютное положение кабины.
Для считывания магнитных полей кодовых меток устройство согласно патенту WO 03011733 А1 имеет сенсорное устройство с несколькими датчиками, что обеспечивает одновременное считывание нескольких кодовых меток. Датчики преобразуют различную полярность магнитных полей в соответствующую двоичную информацию. Для южных полей они выдают двоичную величину 0, а для северных полей - двоичную величину 1. Эта двоичная информация оценивается в оценочном устройстве и преобразуется в понятное для устройства управления лифтом указание абсолютного положения кабины, которое используется устройством управления лифтом в качестве сигналов управления.
Кроме того, в патенте WO 03011733 A1 раскрыто применение небольших датчиков длиной 3 мм, которые расположены на двух лежащих рядом друг с другом дорожках, так что на длину одной кодовой марки приходятся два датчика. За счет этой вдвое большей периодичности датчиков по сравнению с кодовыми метками датчики могут однозначно распознавать переход между кодовыми метками разной полярности в качестве прохождения через ноль магнитного поля.
При измерении магнитного поля кодовых меток разрешение абсолютного положения кабины равно длине кодовой метки, т.е. 4 мм. При измерении перехода между кодовыми метками различной полярности разрешение абсолютного положения кабины значительно лучше и составляет 0,5 мм.
Недостатком устройства согласно патенту WO 03011733 A1 является, во-первых, то, что сила магнитного поля в перпендикулярном направлении над кодовыми метками быстро уменьшается, поэтому датчики необходимо устанавливать на небольшом расстоянии 3 мм над кодовыми метками. Кроме того, недостатком этого устройства является то, что датчики необходимо устанавливать с большой точностью центрирования в +/-1 мм над кодовыми метками. Для достаточно высокой безопасности и достаточной надежности лифта сенсорное устройство необходимо с большими затратами проводить над рисунком кодовых меток. Это является дорогим. В частности, при больших скоростях кабины в 10 м/с связанные с этим затраты особенно велики.
В основу данного изобретения положена задача создания лифта с кабиной и устройством для определения положения кабины, а также способа эксплуатации такого лифта, которые обеспечивают точное считывание рисунка кодовых меток с помощью сенсорного устройства с небольшими затратами без отрицательного влияния на безопасность и надежность.
Эта задача решена согласно изобретению в соответствии с признаками формулы изобретения. Лифт имеет по меньшей мере одну кабину и по меньшей мере одно устройство для определения положения кабины. Устройство имеет рисунок кодовых меток и сенсорное устройство. Рисунок кодовых меток расположен вдоль пути прохождения кабины и состоит из множества кодовых меток. Сенсорное устройство расположено на кабине и считывает кодовые метки с помощью датчиков. Кодовые метки расположены на единственной дорожке, и датчики расположены на единственной дорожке.
Преимущество изобретения состоит в том, что размеры кодовых меток и дорожка датчиков оптимально согласованы с силой сигналов кодовых меток. За счет применения единственной дорожки для кодовых меток и единственной дорожки для датчиков происходит эффективное и без потерь считывание кодовых меток с помощью датчиков. Расположение датчиков на единственной дорожке посредине над дорожкой кодовых меток обеспечивает прицельное считывание кодовых меток в зоне большой силы сигналов. При этом учитывается то, что заданная сила сигналов, во-первых, уменьшается к краям кодовых меток и что, во-вторых, она уменьшается начиная с определенного расстояния над кодовыми метками. Такие эффективно и без потерь считываемые сильные сигналы кодовых меток приводят к большим доверительным областям, в которых датчики могут уверенно и надежно считывать кодовые метки с образованием сильных сигналов датчиков. Тем самым становится возможным целенаправленно выбирать доверительную область и, таким образом, располагать датчики не на ограниченном силой сигналов расстоянии над кодовыми метками, а на расстоянии, определяемом затратами на их проводку. За счет увеличения расстояния датчиков над кодовыми метками уменьшаются затраты на проводку сенсорного устройства, и тем не менее обеспечивается высокая безопасность и надежность лифта.
При заданной силе сигнала кодовых меток и заданной чувствительности датчиков размеры кодовых меток и/или размер дорожки датчиков предпочтительно выбирают так, что датчики располагаются на максимальном расстоянии над кодовыми метками.
Размер меток предпочтительно меньше 2,5 и/или размер дорожки меньше 2,5.
Датчики проводятся над кодовыми марками на наименьшем расстоянии 15 мм, предпочтительно 14 мм, предпочтительно 13 мм, предпочтительно 12 мм, предпочтительно 11 мм, предпочтительно 10 мм, предпочтительно 9 мм, предпочтительно 8 мм, предпочтительно 7 мм, предпочтительно 6 мм, предпочтительно 5 мм, предпочтительно 4 мм.
Ниже приводится подробное описание изобретения применительно к показанным на фиг.1-10 примерам выполнения, на которых изображено:
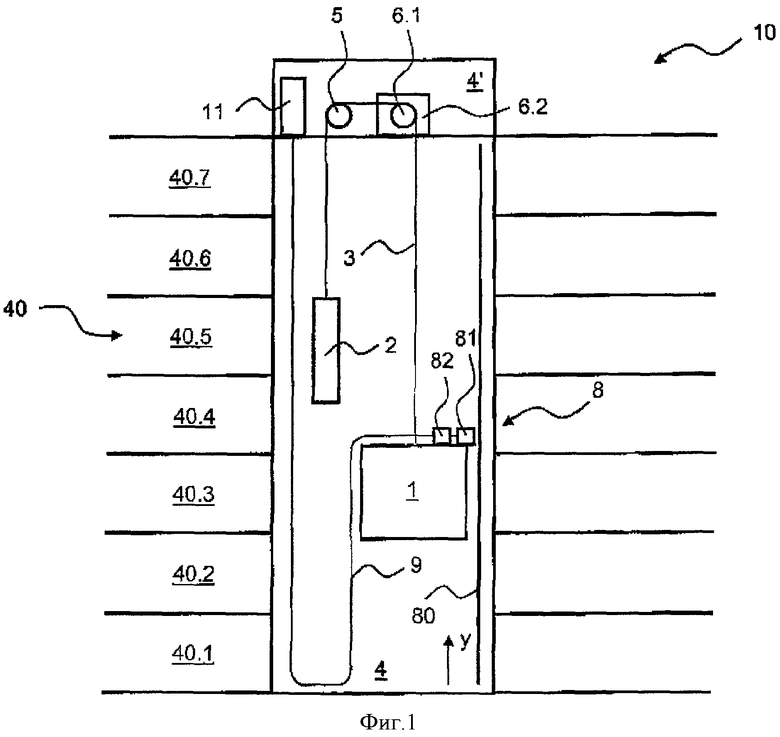
фиг.1 - лифт с кабиной и устройством для определения положения кабины;
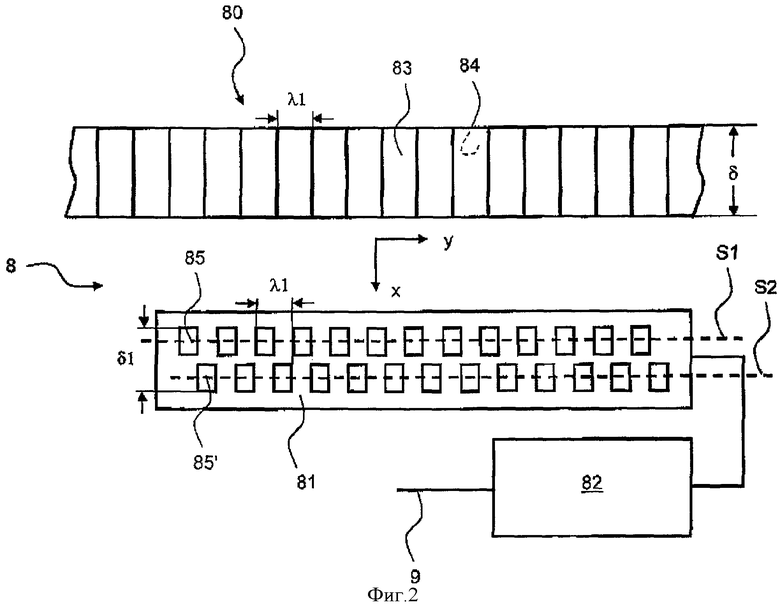
фиг.2 - конструкция части устройства для определения положения кабины с сенсорным устройством и рисунком кодовых меток согласно уровню техники по патенту WO 03011733 A1;
фиг.3 - конструкция части устройства для определения положения кабины согласно первому варианту выполнения изобретения с сенсорным устройством и рисунком кодовых меток;
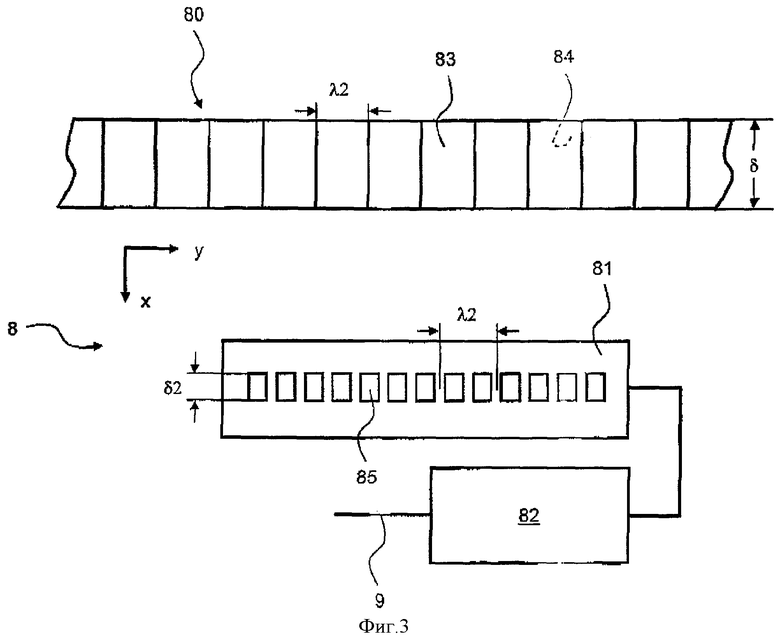
фиг.4 - конструкция части устройства для определения положения кабины согласно второму варианту выполнения изобретения с сенсорным устройством и рисунком кодовых меток;
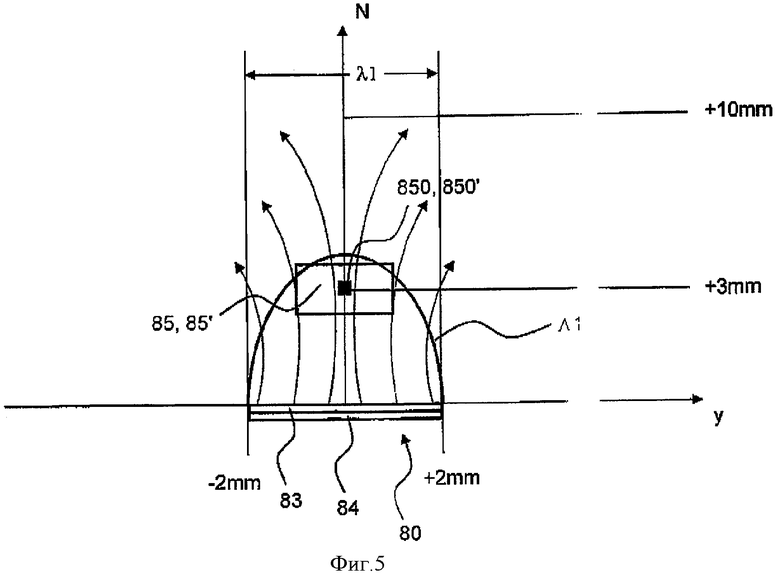
фиг.5 - продольный разрез сенсорного устройства над кодовой меткой для определения положения кабины согласно уровню техники, представленному на фиг.2;
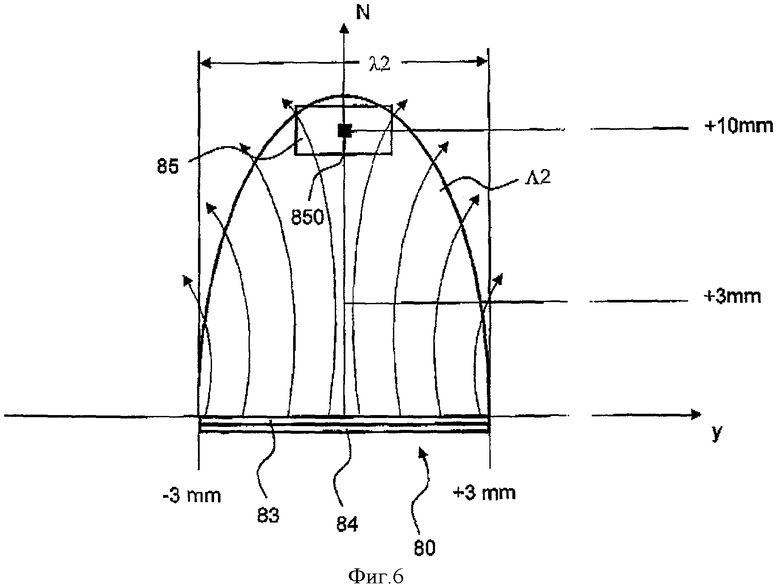
фиг.6 - продольный разрез сенсорного устройства над кодовой меткой устройства для определения положения кабины согласно первому варианту выполнения изобретения, показанному на фиг.3;
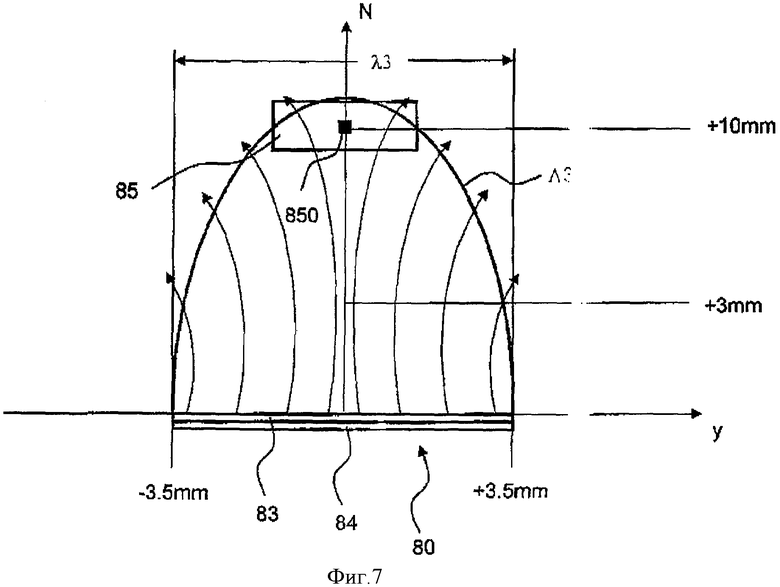
фиг.7 - продольный разрез сенсорного устройства над кодовой меткой устройства для определения положения кабины согласно второму варианту выполнения изобретения, показанному на фиг.4;
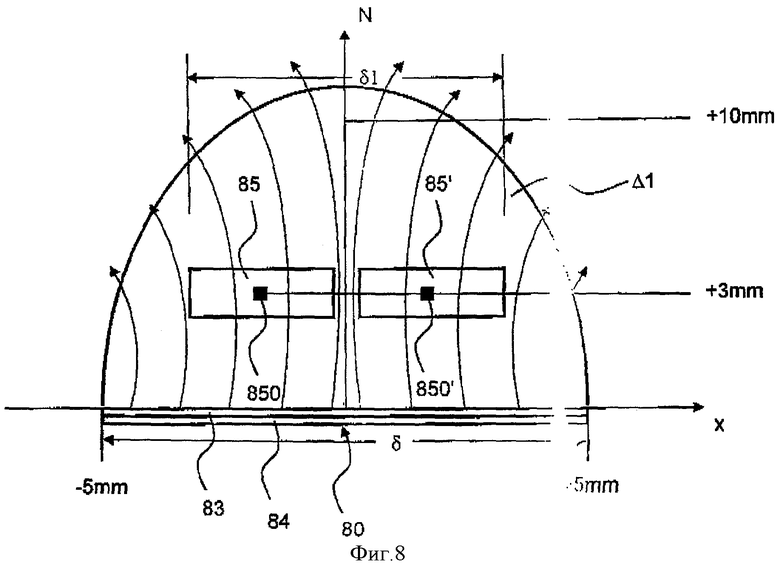
фиг.8 - поперечный разрез сенсорного устройства над кодовой меткой устройства для определения положения кабины согласно уровню техники, представленному на фиг.2 и 5;
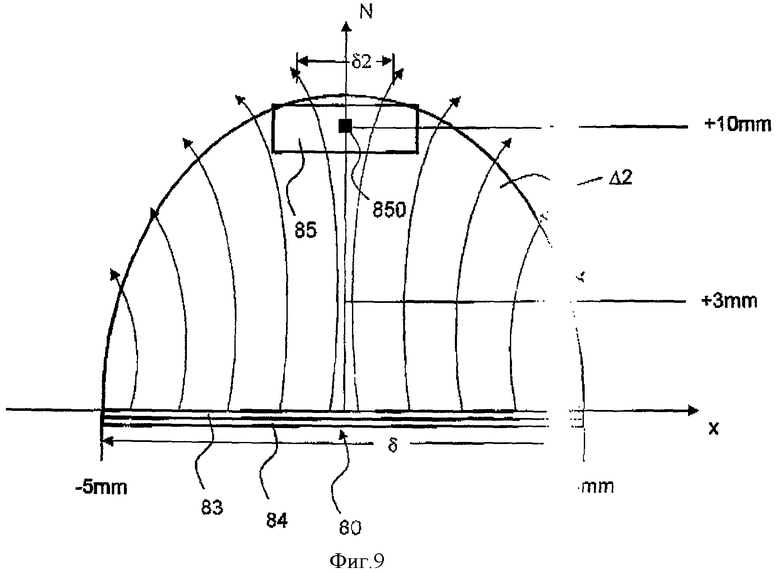
фиг.9 - поперечный разрез сенсорного устройства над кодовой меткой устройства для определения положения кабины согласно первому варианту выполнения изобретения, показанному на фиг.3 и 6;
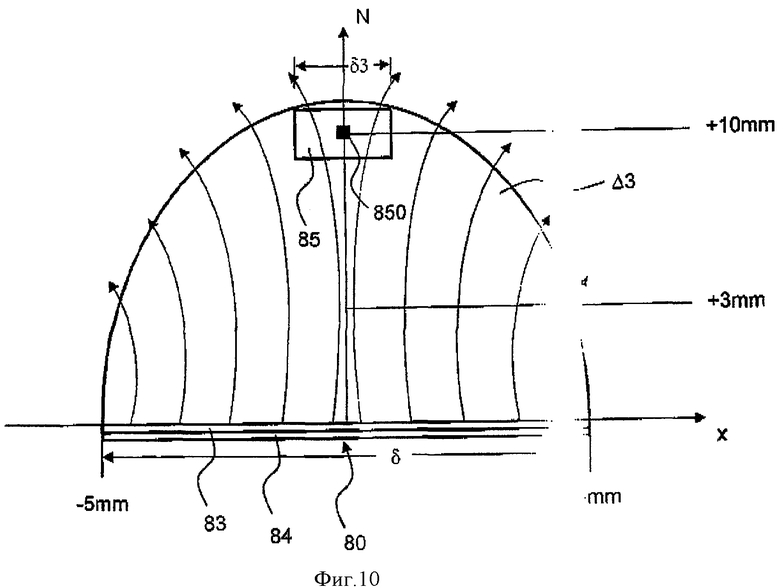
фиг.10 - поперечный разрез сенсорного устройства над кодовой меткой устройства для определения положения кабины согласно второму варианту выполнения изобретения, показанному на фиг.4 и 7.
В показанном схематично на фиг.1 лифте 10 кабина 1 и противовес 2 подвешены по меньшей мере на одном несущем тросе 3 в шахте 4 здания 40. Несущий трос 3 проходит по направляющему ролику 5 и приводится в движение приводом 6.2 через приводной диск 6.1. Направляющий ролик 5, приводной диск 6.1 и привод 6.2 могут быть размещены в отдельном машинном отделении 4', однако они могут находиться также непосредственно в шахте 4. За счет вращения приводного диска 6 вправо или влево кабина 1 перемещается по пути прохождения y и обслуживает этажи 40.1-40.7 здания 40.
Устройство 8 для определения положения кабины имеет рисунок 80 кодовых меток, сенсорное устройство 81 и оценочное устройство 82. Рисунок 80 кодовых меток имеет цифровое кодирование абсолютных положений кабины 1 в шахте 4 относительно опорной точки. Рисунок 80 кодовых меток расположен неподвижно в шахте 4. Рисунок 80 кодовых меток может быть расположен в шахте 4 со свободным натяжением, но может быть также закреплен на стенках шахты или на направляющих рельсах лифта 10. Сенсорное устройство 81 и оценочное устройство 82 расположены на кабине 1. Таким образом, сенсорное устройство 81 перемещается вместе с кабиной 1 и при этом считывает кодовые метки рисунка кодовых меток бесконтактным образом. Для этой цели сенсорное устройство 81 проводится на небольшом расстоянии от рисунка 80 кодовых меток. Для этого сенсорное устройство 81 закреплено на кабине 1 с помощью держателя перпендикулярно пути прохождения кабины 1. Как показано на фиг.1, сенсорное устройство 81 закреплено на крыше кабины 1, но его можно закреплять также сбоку или внизу кабины 1. Сенсорное устройство 81 передает считываемую информацию в оценочное устройство 82. Оценочное устройство 82 преобразует считанную информацию в понятное для управляющего устройства 11 лифта указание абсолютного положения. Через подвесной кабель 9 данные абсолютного положения передаются в управляющее устройство 11 лифта. Управляющее устройство 11 лифта использует эти данные абсолютного положения для различных целей. Например, они служат для управления перемещением кабины 1, например, для инициирования замедления или ускорения. Они служат также для замедления в конце шахты, в качестве концевого ограничения шахты, для распознавания этажей, для точного позиционирования кабины 1 на этажах и, естественно, также для измерения скорости кабины 1.
После знакомства с данным изобретением специалист может реализовать также другие лифты с другими видами привода, такими как гидравлический привод и т.д., или лифты без противовеса, а также беспроводную передачу данных положения в управляющее устройство лифта.
На фиг.2-4 показана конструкция частей устройств 8 для определения положения кабины с помощью сенсорного устройства 81 и рисунка 80 кодовых меток. В то время как на фиг.2 показан вариант выполнения устройства 8 для определения положения кабины согласно уровню техники, представленному в патенте WO 03011733 A1, на фиг.3 и 4 показаны первый и второй варианты выполнения устройства 8 согласно изобретению для определения положения кабины.
Рисунок 80 кодовых меток состоит из множества расположенных на носителе 84 кодовых меток 83. Используемые в показанных вариантах выполнения устройства 8 для определения положения кабины кодовые метки 83 являются все идентичными с точки зрения используемых материалов.
Кодовые метки предпочтительно имеют большую коэрцитивную силу. Носитель 80 является, например, пластмассовой лентой толщиной 1 мм и шириной 10 мм. Кодовые метки 83 выполнены, например, из магнетизируемого материала также с толщиной меток 1 мм и шириной меток δ=10 мм. Кодовые метки 83 расположены в продольном направлении y и образуют одинаково длинные прямоугольные участки. Продольное направление y соответствует направлению движения y на фиг.1. Кодовые метки 83 находятся на одинаковом расстоянии друг от друга. Они намагничиваются либо как южный полюс, либо как северный полюс. Кодовые метки 83 предпочтительно намагничиваются до насыщения. Для железа в качестве магнитного материала кодовых меток магнетизация насыщения составляет 2,4 Т. Кодовые метки имеют заданную силу сигнала, например, он обеспечивается посредством определенного намагничивания +/-10 мТ. Южный полюс образует отрицательное магнитное поле, а северный полюс образует положительно ориентированное магнитное поле. После знакомства с данным изобретением можно, естественно, использовать рисунки кодовых меток с другими размерами, а также применять более толстые или более тонкие метки. Кроме того, наряду с железом в качестве магнитного материала для кодовых меток можно использовать также любые другие хорошо зарекомендовавшие себя в промышленности и дешевые магнитные материалы, например редкоземельные металлы, такие как неодим, самарий и т.д., или магнитные сплавы, или оксидные вещества, или магнитны с полимерной связью и т.д.
Различия между рисунками 80 кодовых меток в вариантах выполнения устройства 8 для определения положения кабины состоят в том, что в варианте выполнения согласно уровню техники, показанном на фиг.2, длина метки λ1=4 мм, в то время как в первом варианте выполнения изобретения согласно фиг.3 длина метки λ2=6 мм, а во втором варианте выполнения изобретения согласно фиг.4 длина метки λ2=7 мм. Таким образом, кодовые метки 83 согласно изобретению длиннее кодовых меток 83 согласно уровню техники. Размер меток MD1, MD2, MD3 определяется как отношение ширины к длине кодовых меток 83. Согласно уровню техники, показанному на фиг.2, размер меток MD1=10/4=2,5, в то время как согласно варианту выполнения изобретения, показанному на фиг.3, MD2=10/6=1,7, соответственно согласно фиг.4 MD3=10/7=1,4. Таким образом, размер меток MD согласно изобретению MD2, MD3<2,5. После знакомства с данным изобретением можно, естественно, использовать также рисунки кодовых меток с другими размерами с меньшими размерами меток, например MD<=1,2, соответственно MD<=1,0.
Сенсорное устройство 81 считывает магнитные поля кодовых меток 83 в продольном направлении y с помощью нескольких расположенных на равном расстоянии друг от друга датчиков 85, 85'. Используемые в трех вариантах выполнения устройства 8 для определения положения кабины датчики 85, 85' являются идентичными с точки зрения механических размеров и чувствительности. В качестве датчиков 85, 85' предпочтительно используются недорогие и легко управляемые и легко считываемые датчики Холла. Датчики 85, 85' образуют одинаковые прямоугольные участки с широкой стороной 3 мм и узкой стороной 2 мм. Например, датчики 85, 85' являются датчиками, расположенными на носителе, при этом носитель ограничивает широкую сторону и узкую сторону, и собственно чувствительная поверхность 850, 850' имеет значительно меньший размер, например 1 мм2. В датчиках Холла чувствительная поверхность 850, 850' обычно расположена центрально внутри датчиков. Датчики 85, 85' измеряют с помощью чувствительной поверхности 850, 850' магнитные поля кодовых меток 83 и выдают в виде сигналов датчиков. Чем больше сила сигнала кодовых меток 83, тем сильнее сигнал датчиков 85, 85'. Типичная чувствительность датчиков Холла составляет 150 В/Т. Датчики 85, 85' выдают для измеряемых как аналоговые напряжения магнитных полей кодовых меток 83 двоичную информацию. Для южного полюса они выдают двоичную величину 0, а для северного полюса - двоичную величину 1. После знакомства с данным изобретением специалист может использовать также другие магнитные датчики, такие как катушки. Он может использовать также датчики с другими размерами с более широкими или узкими широкими сторонами, а также более широкими или более узкими сторонами. Специалист может также использовать более чувствительные или менее чувствительные датчики Холла.
Рисунок 80 кодовых меток имеет двоичное псевдослучайное кодирование. Двоичное псевдослучайное кодирование является, таким образом, непрерывными, расположенными друг за другом последовательностями с двоичными величинами 0 или 1. При каждом перемещении на одну двоичную величину в двоичном псевдослучайном кодировании устанавливается новая n-значная последовательность с двоичными величинами 0 или 1. Такая последовательность из n расположенных друг за другом двоичных величин называется кодовым словом. Например, применяется кодовое слово с 13-значной последовательностью. При одновременном считывании тринадцати следующих друг за другом кодовых меток 83 рисунка 80 кодовых меток однозначно и без повторения кодовых слов считывается 13-значная последовательность. Сенсорное устройство 81 для считывания кодовых слов содержит тринадцать плюс один, т.е. четырнадцать датчиков 85, 85'. После знакомства с данным изобретением специалист может, естественно, использовать сенсорные устройства с более или менее длинными кодовыми словами и в соответствии с этим применять больше или меньше датчиков. Можно осуществлять также так называемое манчестерское кодирование, в котором после каждой кодовой метки в виде южного полюса вставляется противоположная кодовая метка в виде северного полюса и наоборот. Таким образом, в рисунке кодовых меток происходит по меньшей мере после двух кодовых меток переход через ноль магнитного поля, что обеспечивает синхронизацию датчиков. В этом случае кодовые слова в два раза длиннее и необходимо в два раза больше датчиков для считывания кодовых слов. Специалист может применять любое известное и хорошо зарекомендовавшее себя в промышленности, однозначное повторяющееся абсолютное кодирование.
Для получения разрешающей способности 0,5 мм для абсолютного положения кабины, переходы между кодовыми метками 83 различной полярности измеряются как прохождения через ноль магнитного поля. Для этого периодичность датчиков 85, 85' в два раза выше периодичности кодовых меток 83, т.е. на длине λ1, λ2, λ3 меток лежат два датчика 85, 85'. Таким образом, каждая кодовая метка 83 рисунка 80 кодовых меток измеряется двумя датчиками 85, 85'. Если один из обоих датчиков 85, 85' находится вблизи изменения кодового слова и выдает сигнал датчика с величиной приблизительно ноль, то другой датчик 85, 85' находится с уверенностью над кодовой меткой 83 и выдает надежную информацию. Это выполнение устройства для определения положения кабины с двумя датчиками на одну кодовую метку является практичным для получения высокого разрешения, однако оно не является обязательным для реализации изобретения.
Различие сенсорного устройства 81 в трех вариантах выполнения устройства 8 для определения положения кабины состоит в том, что в варианте выполнения согласно уровню техники, показанном на фиг.2, датчики 85, 85' расположены в продольном направлении у на двух дорожках S1 и S2 с общей шириной дорожки δ2=7 мм, в то время как датчики 85 согласно первому варианту выполнения изобретения, показанному на фиг.3, расположены в продольном направлении у на единственной дорожке с шириной дорожки δ2=3 мм, а датчики 85 согласно второму варианту выполнения изобретения, показанному на фиг.4, расположены в продольном направлении у на единственной дорожке с шириной дорожки δ2=2 мм. В варианте выполнения, показанном на фиг.2, первая дорожка S1 датчиков 85 образована широкой стороной датчиков 85, вторая дорожка S2 датчиков 85' образована широкой стороной датчиков 85', обе дорожки S1, S2 в поперечном направлении х расположены на расстоянии 1 мм друг от друга. В первом варианте выполнения изобретения, показанном на фиг.3, ширина дорожки δ2=3 мм образована лишь широкой стороной датчиков 85. Во втором варианте выполнения изобретения, показанном на фиг.4, ширина дорожки δ2=2 мм образована лишь узкой стороной датчиков 85. Таким образом, дорожка из датчиков 85 согласно изобретению уже, чем обе дорожки S1, S2 согласно уровню техники. Размеры дорожек SD1, SD2, SD3 датчиков 85, 85' определяются как отношение ширины дорожки δ к длине одного датчика 85, 85'. Согласно уровню техники, показанному на фиг.2, размер дорожки составляет SD1=7/2, в то время как согласно варианту выполнения изобретения, показанному на фиг.3, размер дорожки SD2=3/2, соответственно согласно фиг.4 размер дорожки SD3=2/3. Таким образом, размер дорожки SD согласно изобретению SD2, SD3<2,5. После знакомства с данным изобретением можно использовать, естественно, сенсорные устройства с другим размерами с еще меньшими размерами дорожки SD<=2/3 соответственно, с размером дорожки SD=1 соответственно, с большими размерами дорожки SD>=2/3.
На фиг.5-7 показаны разрезы в продольном направлении у устройства 8 для определения положения кабины. В то время как на фиг.5 показано сенсорное устройство 81 и рисунок 80 кодовых меток устройства 8 для определения положения кабины согласно уровню техники, показанному на фиг.2, на фиг.6 и 7 показан первый, соответственно второй варианты выполнения согласно изобретению расположения сенсорного устройства 81 и рисунка 80 кодовых меток устройства 8 для определения положения кабины согласно фиг.3 и 4.
Магнитные поля представлены изогнутыми относительно нормалей N стрелками. Сила сигнала кодовых меток 83 в середине кодовых меток 83 является максимальной и уменьшается к краям кодовых меток 83. Сила сигнала кодовых меток 83 уменьшается также начиная с определенного расстояния над кодовыми метками 83. Область с достаточно сильными магнитными полями над кодовыми метками 83, в которой кодовые метки 83 могут уверенно и надежно считываться сенсорным устройством 81, называется доверительной областью. Доверительная область определяется силой сигнала кодовых меток 83, чувствительностью датчиков 85, 85', а также размерами MD1, MD2, MD3 меток 83 и размерами дорожки SD1, SD2, SD3 датчиков 85, 85'. При заданной силе сигнала кодовых меток 83 и заданной чувствительности датчиков 85, 85' доверительная область определяется лишь размерами меток MD1, MD2, MD3 и размерами дорожки SD1, SD2, SD3. Чувствительные поверхности 850, 850' датчиков 85, 85' должны лежать в доверительной области с зазором +/-1 мм. Кривая Λ1 ограничивает доверительную область в продольном направлении у устройства 8 для определения положения кабины согласно уровню техники, показанному на фиг.2. Кривая Λ2 ограничивает доверительную область в продольном направлении у устройства 8 для определения положения кабины согласно первому варианту выполнения изобретения, показанному на фиг.3. Кривая Λ3 ограничивает доверительную область в продольном направлении у устройства 8 для определения положения кабины согласно второму варианту выполнения изобретения, показанному на фиг.4.
На основе различного размера меток MD1=10/4 кодовых меток 83 в варианте выполнения согласно фиг.2 и MD2=10/6 в первом варианте выполнения изобретения согласно фиг.3, а также MD3=10/7 во втором варианте выполнения изобретения согласно фиг.4 высота кривой Λ1 ниже высоты кривых Λ2, Λ3. Хотя ширина меток δ=10 мм во всех вариантах выполнения одинакова, однако более короткие кодовые метки согласно уровню техники, показанному на фиг.2, обуславливают меньшую эффективную силу сигнала и тем самым более низкую доверительную область. Потери силы сигнала кодовых меток 83 с короткой длиной меток λ=4 мм согласно фиг.2 настолько велики, что датчики 85, 85' необходимо располагать на более близком расстоянии, равном лишь 3 мм, над кодовыми метками 83. Таким образом, расположение датчиков 85, 85' согласно фиг.2 ограничивается силой сигнала, поскольку чувствительные поверхности 850, 850' должны лежать в доверительной области с зазором +/-1 мм.
В противоположность этому в обоих вариантах выполнения согласно данному изобретению, показанных на фиг.3 и 4, длина меток λ2=6 мм, соответственно λ2=7 мм больше, и уменьшаются потери силы сигнала кодовых меток 83, что выражается в увеличенной доверительной области. Эта большая доверительная область позволяет располагать датчики 85 не на ограничиваемом силой сигнала расстоянии над кодовыми метками 83, а на расстоянии, определяемом затратами на проводку датчиков над кодовыми метками 83. Таким образом, датчики 85, 85' располагаются на расстоянии 10 мм над кодовыми метками 83. Дальнейшее увеличение длины кодовых меток не приводит к дополнительному увеличению доверительной области. Это следует из высоты кривых Δ1, Δ2, Δ3 доверительных областей в поперечном направлении х на фиг.8-10, которые являются результатом ширины меток δ=10 мм. После ознакомления с данным изобретением специалист может проводить датчики за счет целенаправленного выбора минимального расстояния 15 мм, предпочтительно 14 мм, предпочтительно 13 мм, предпочтительно 12 мм, предпочтительно 11 мм, предпочтительно 10 мм, предпочтительно 9 мм, предпочтительно 8 мм, предпочтительно 7 мм, предпочтительно 6 мм, предпочтительно 5 мм, предпочтительно 4 мм над кодовыми метками.
На фиг.8-10 показаны разрезы в поперечном направлении х устройства 8 для определения положения кабины. В то время как на фиг.8 показано сенсорное устройство 81 и рисунок 80 кодовых меток устройства 8 для определения положения кабины согласно уровню техники, как показано на фиг.2 и 5, на фиг.9 и 10 показаны первый, соответственно второй варианты выполнения расположения сенсорного устройства 81 и рисунка 80 кодовых меток устройства 8 для определения положения кабины согласно изобретению, как показано на фиг.3 и 6, соответственно фиг.4 и 7.
Как указывалось выше, область с достаточно сильным сигналом датчиков 85, 85' над кодовыми метками 83 называется доверительной областью, в которой сенсорное устройство 81 может уверенно и надежно считывать кодовые метки 83. Кривая Δ1 ограничивает доверительную область в поперечном направлении х устройства 8 для определения положения кабины согласно уровню техники, показанного на фиг.2. Кривая Δ2 ограничивает доверительную область в поперечном направлении х первого варианта выполнения устройства 8 для определения положения кабины согласно изобретению, показанного на фиг.3 и 6. Кривая Δ3 ограничивает доверительную область в поперечном направлении х второго варианта выполнения устройства 8 для определения положения кабины согласно изобретению, показанного на фиг.4 и 7.
На основе одинаковой ширины меток 10 мм высота кривых Δ1, Δ2, Δ3 одинакова. Как в случае варианта выполнения сенсорного устройства 81 согласно уровню техники, показанного на фиг.2, с шириной дорожки δ1=7 мм, так и в случае первого и второго вариантов выполнения сенсорного устройства 81 согласно изобретению, показанного на фиг.3 и 4, с шириной дорожки δ2=3 мм, соответственно δ3=3 мм чувствительные поверхности их датчиков лежат в доверительной области кривых Δ1, Δ2 и Δ3.
После ознакомления с данным изобретением специалист может, естественно, осуществлять другие рисунки кодовых меток и соответственно другие сенсорные устройства. Например, возможны другие физические принципы для представления продольного кодирования. Например, кодовые метки могут иметь различные диэлектрические постоянные, которые считываются сенсорным устройством, измеряющим емкостные эффекты. Возможен также отражательный рисунок кодовых меток, при котором в зависимости от значения отдельных кодовых меток сенсорное устройство измеряет больше или меньше отраженного света.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КАБИНЫ ЛИФТА | 2015 |
|
RU2699744C2 |
| ЛИФТ С СИСТЕМОЙ КОНТРОЛЯ | 2010 |
|
RU2524319C2 |
| УПРАВЛЯЕМЫЙ ДОСТУП К КАБИНЕ ЛИФТА | 2007 |
|
RU2427523C2 |
| КОНТРОЛЬНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ НЕЖЕЛАТЕЛЬНОГО ВЫХОДА КАБИНЫ ЛИФТА ИЗ НЕПОДВИЖНОГО СОСТОЯНИЯ | 2011 |
|
RU2587283C2 |
| ТОРМОЗНОЕ ИЛИ ЛОВИЛЬНОЕ УСТРОЙСТВО ДЛЯ КАБИНЫ ЛИФТА И ЛИФТ | 2007 |
|
RU2430872C2 |
| ЛИФТОВАЯ УСТАНОВКА И СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ЧЕЛОВЕКА, НАХОДЯЩЕГОСЯ НА КРЫШЕ КАБИНЫ ДВИЖУЩЕГОСЯ ЛИФТА | 2004 |
|
RU2455220C2 |
| ЛИФТ С ДВУМЯ КАБИНАМИ | 2008 |
|
RU2495814C2 |
| САМОНЕСУЩАЯ КАБИНА ЛИФТА | 2008 |
|
RU2472694C2 |
| СИСТЕМА С НЕСКОЛЬКИМИ КАБИНАМИ В ШАХТЕ ЛИФТА | 2011 |
|
RU2717398C2 |
| СИСТЕМА С НЕСКОЛЬКИМИ КАБИНАМИ В ШАХТЕ ЛИФТА | 2011 |
|
RU2577445C2 |
Изобретение относится к лифту, содержащему по меньшей мере одну кабину и по меньшей мере одно устройство для определения положения кабины, а также к способу эксплуатации такого лифта. Устройство имеет рисунок (80) кодовых меток и сенсорное устройство (81). Рисунок (80) кодовых меток расположен вдоль пути прохождения кабины, состоит из множества кодовых меток (83) и имеет цифровое кодирование абсолютных положений кабины. Сенсорное устройство (81) расположено на кабине и считывает кодовые метки с помощью датчиков (85) без соприкосновения с метками. Кодовые метки (83) расположены на единственной дорожке, и датчики (85) расположены на единственной дорожке. 2 н. и 4 з.п. ф-лы, 10 ил.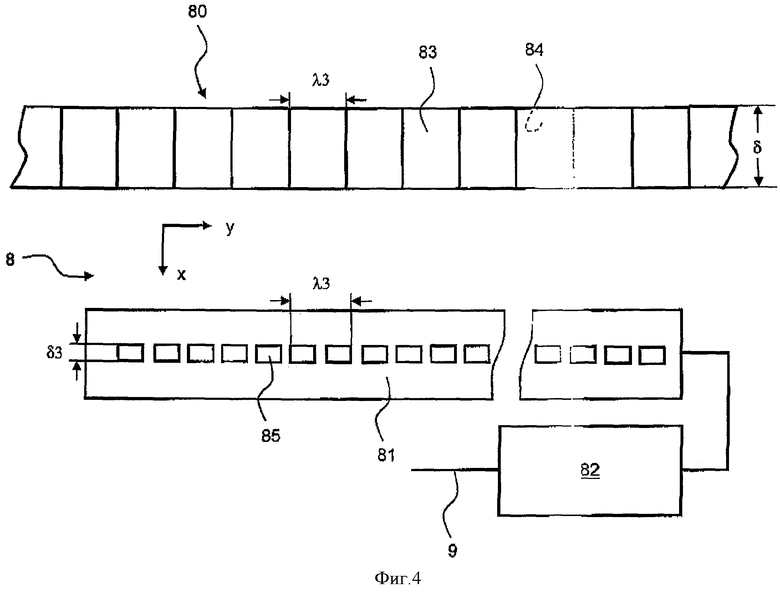
1. Лифт (10), содержащий по меньшей мере одну кабину (1) и по меньшей мере одно устройство (8) для определения положения кабины, при этом устройство (8) имеет рисунок (80) кодовых меток и сенсорное устройство (81), рисунок (80) кодовых меток расположен вдоль пути прохождения кабины (1) и состоит из множества кодовых меток (83), сенсорное устройство (81) расположено на кабине (1) с возможностью считывать кодовые метки (83) с помощью датчиков (85) без соприкосновения с метками, причем кодовые метки (83) расположены на единственной дорожке, и датчики (85) расположены на единственной дорожке, отличающийся тем, что рисунок (80) кодовых меток имеет цифровое кодирование абсолютных положений кабины (1), причем размер (MD2, MD3) кодовых меток (83), определяемый отношением ширины кодовой метки к ее длине, лежит в интервале между 2,5 и 1 и/или размер (SD2, SD3) дорожки датчиков, определяемый отношением ширины дорожки датчиков к длине датчика, лежит в интервале между 2,5 и 1.
2. Лифт по п.1, отличающийся тем, что при заданной силе сигнала кодовых меток (83) и заданной чувствительности датчиков (85), размер (MD2, MD3) кодовых меток (83) и/или размер (SD2, SD3) дорожки датчиков выбираются так, что датчики (85) можно располагать на максимальном расстоянии над кодовыми метками (83).
3. Лифт по п.1 или 2, отличающийся тем, что датчики (85) проходят на минимальном расстоянии 6 мм, предпочтительно 5 мм, предпочтительно 4 мм над кодовыми метками (83).
4. Способ эксплуатации лифта (10), содержащего по меньшей мере одну кабину (1) и по меньшей мере одно устройство (8) для определения положения кабины, при этом устройство (8) имеет рисунок (80) кодовых меток и сенсорное устройство (81), рисунок (80) кодовых меток расположен вдоль пути прохождения кабины (1) и состоит из множества кодовых меток (83), сенсорное устройство (81) расположено на кабине (1) и считывает кодовые метки (83) с помощью датчиков (85) без соприкосновения с метками, причем кодовые метки (83) располагают на единственной дорожке, и что датчики (85) располагают на единственной дорожке, отличающийся тем, что рисунок (80) кодовых меток имеет цифровое кодирование абсолютных положений кабины (1), причем размер (MD2, MD3) кодовых меток (83), определяемый отношением ширины кодовой метки к ее длине, лежит в интервале между 2,5 и 1 и/или размер (SD2, SD3) дорожки датчиков, определяемый отношением ширины дорожки датчиков к длине датчика, лежит в интервале между 2,5 и 1.
5. Способ по п.4, отличающийся тем, что при заданной силе сигнала кодовых меток (83) и заданной чувствительности датчиков (85), размер (MD2, MD3) кодовых меток (83) и/или размер (SD2, SD3) дорожки датчиков выбирают так, что датчики (85) можно располагать на максимальном расстояний над кодовыми метками (83).
6. Способ по п.4 или 5, отличающийся тем, что датчики (85) проходят на минимальном расстоянии 6 мм, предпочтительно 5 мм, предпочтительно 4 мм над кодовыми метками (83).
| US 4991693 A, 12.02.1991 | |||
| Устройство для раскрывания клапанных мешков | 1975 |
|
SU579890A3 |
| JP 7157220 A, 20.06.1995 | |||
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛИФТА | 1996 |
|
RU2179143C2 |
| US 6011389 A, 04.01.2000. | |||

