Изобретение относится к лифту с системой контроля в соответствии с ограничительной частью независимых пунктов формулы изобретения.
Публикация WO 03/107295 А1 раскрывает систему контроля для мониторинга состояния периферийных устройств, например компонентов лифтов. Система шин включает шину, центральный блок управления, который подключен к шине через несколько периферийных устройств. Каждое из этих устройств расположено на шинном узле и общается через шину с блоком управления. В любое время периферийные устройства могут принять определенный статус. Блок управления периодически запрашивает через шину статус каждого периферийного устройства.
Шина снабжается через блок управления энергией и питает индукционные петли, являющиеся частью шинного узла. Отдельные периферийные устройства через местную антенну соединены с индукционными петлями шинного узла и получают через назначенную индукционную петлю электромагнитную энергию. Через индукционную петлю периферийное устройство сообщает блоку управления при каждом запросе свой идентификационный код, а также свой текущий статус. Через эту индукционную петлю блок управления может назначить считанный статус определенному периферийному устройству.
Преимуществом такой системы контроля является простота соединения между шиной и периферийным устройством посредством индукционных петель. Отпадает необходимость прокладки сложной и дорогостоящей проводки для периферийных устройств.
Недостатком, правда, является периодический запрос статуса периферийных устройств через шину. Так как блок управления активно запрашивает периферийные устройства, шина передает на каждый запрос и каждому периферийному устройству два сигнала. При относительно коротких циклах запросов, именно имеющих значение для безопасности периферийных устройств, и относительно большом количестве таких устройств между блоком управления и периферийными устройствами происходит обмен многочисленными сигналами. Это означает, что блок управления имеет высокую вычислительную мощность для обработки всех сигналов. Кроме этого шина сильно нагружается и предоставляет высокие мощности для передачи сигналов. Поэтому блок управления и шина имеют высокую стоимость.
Задача настоящего изобретения состоит в создании усовершенствованных известных систем контроля для лифта.
Вышеназванная задача решается изобретением согласно независимым пунктам формулы изобретения.
Согласно варианту выполнения лифт оснащен блоком управления, шиной, по меньшей мере, одним первым микропроцессором и одним вторым микропроцессором, сведенными в шинный узел и связанными через шину с блоком управления. Лифт отличается тем, что блок управления передает через шину на второй микропроцессор команду прервать передачу сигналов на первый микропроцессор таким образом, что первый микропроцессор посылает на блок управления сообщение о состоянии режима.
Преимущество такого лифта заключается в простом и надежном контроле работоспособности первого микропроцессора. При этом вызывается спонтанное срабатывание путем прерывания передачи вторым микропроцессором сигнала о состоянии на первый микропроцессор и таким образом симулируется, например, начало опасного состояния.
В предпочтительном варианте выполнения в лифте расположены, по меньшей мере, один несущий код элемент и, по меньшей мере, один считывающий код элемент в шинном узле. Считывающий код элемент считывает бесконтактным способом идентификационный код несущего код элемента и отправляет сигнал на первый микропроцессор.
Предпочтительно несущий код и считывающий код элементы имеют каждый по одной индукционной петле. Считывающий код элемент снабжает бесконтактным способом несущий код элемент электромагнитной энергией. Несущий код элемент передает свой идентификационный код через обе индукционные петли бесконтактным способом на считывающий код элемент.
Особым преимуществом является бесконтактный контроль состояния компонента лифта. Применяемые сенсорные компоненты, включающие несущий код элемент и считывающий код элемент, во время эксплуатации почти не изнашиваются. Это позволяет снизить эксплуатационные расходы и повысить надежность контроля.
Кроме этого несущие код элементы и считывающие код элементы, например, в варианте выполнения представлены на рынке как массовый продукт в виде пассивной или активной системы RFID (идентификация радиочастоты).
В другом предпочтительном варианте выполнения считывающий код элемент передает сигнал по проводнику данных на, по меньшей мере, первый микропроцессор. Второй микропроцессор приводит в действие прерыватель для прерывания провода передачи данных или выключатель для прерывания энергоснабжения считывающего код элемента. Затем блок управления подтверждает сообщение о состоянии первого микропроцессора на основе прерывания передачи сигналов вторым микропроцессором.
Если блок управления не может подтвердить спровоцированное сообщение о состоянии первого микропроцессора, необходимо исходить из того, что, по меньшей мере, у первого или второго микропроцессора сработала ошибочная функция и контроль состояния больше не надежен.
Преимущество такого теста заключается в том, что отпадает необходимость постоянного запроса блоком управления принимаемых первым микропроцессором сигналов о состоянии. Пока блок управления регистрирует работоспособность первого микропроцессора, вполне достаточно, если первый микропроцессор передаст на блок управления сообщение о состоянии только после начала потенциально опасного состояния лифта. Это сокращает количество обрабатываемых сигналов. Таким образом, можно применять более оптимальные по соотношению цена/качество шины и блоки управления.
Ниже изобретение поясняется вариантами выполнения и чертежами и раскрывается более детально:
фигура 1 представляет первый вариант выполнения системы контроля с одним прерывателем для прерывания провода передачи данных;
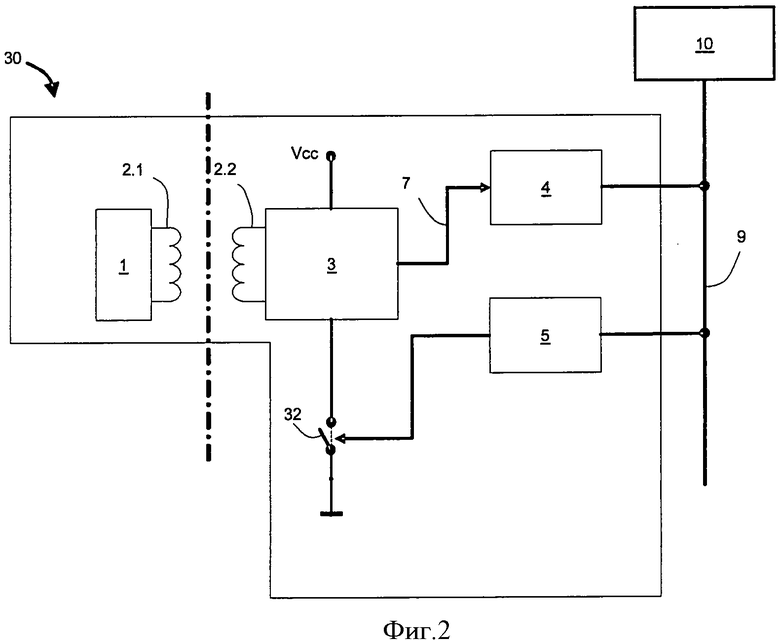
фигура 2 представляет второй вариант выполнения системы контроля с одним прерывателем для прерывания энергоснабжения считывающего код элемента;
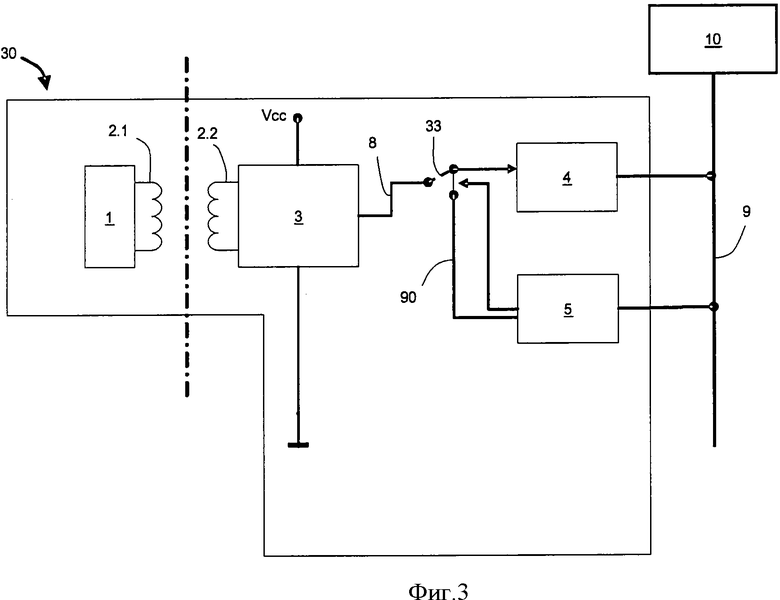
фигура 3 представляет третий вариант выполнения системы контроля с одним выключателем для прерывания первого провода передачи данных и закрытия второго провода передачи данных;
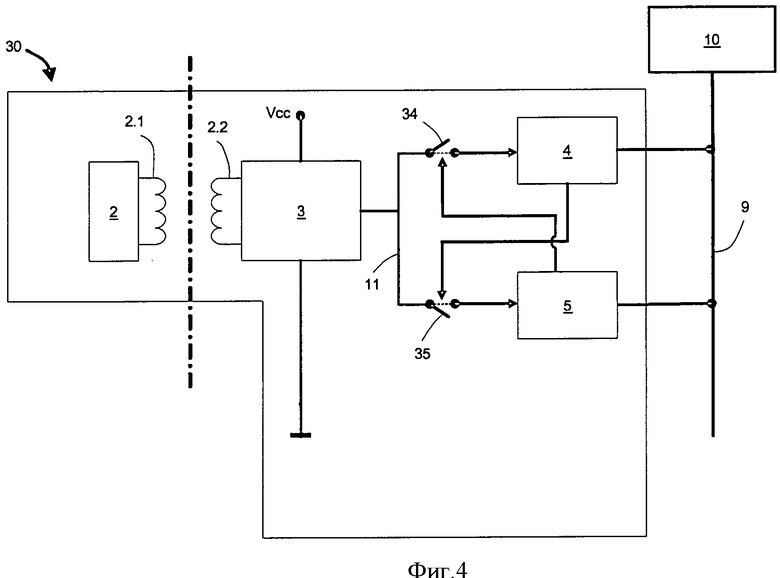
фигура 4 представляет четвертый вариант выполнения системы контроля с резервной обработкой параметра статуса и одним первым прерывателем для прерывания второго провода передачи данных;
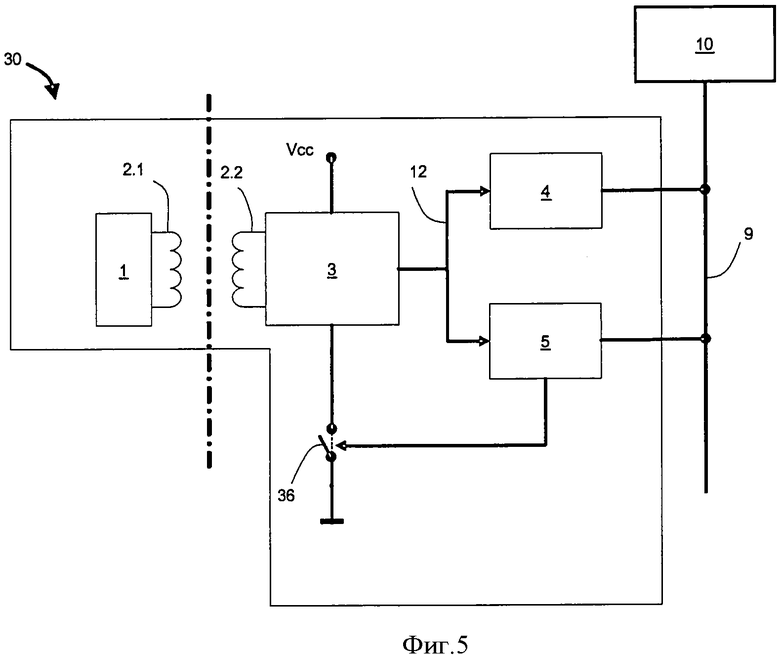
фигура 5 представляет пятый вариант выполнения системы контроля с резервной обработкой параметра статуса и одним прерывателем для прерывания энергоснабжения считывающего код элемента;
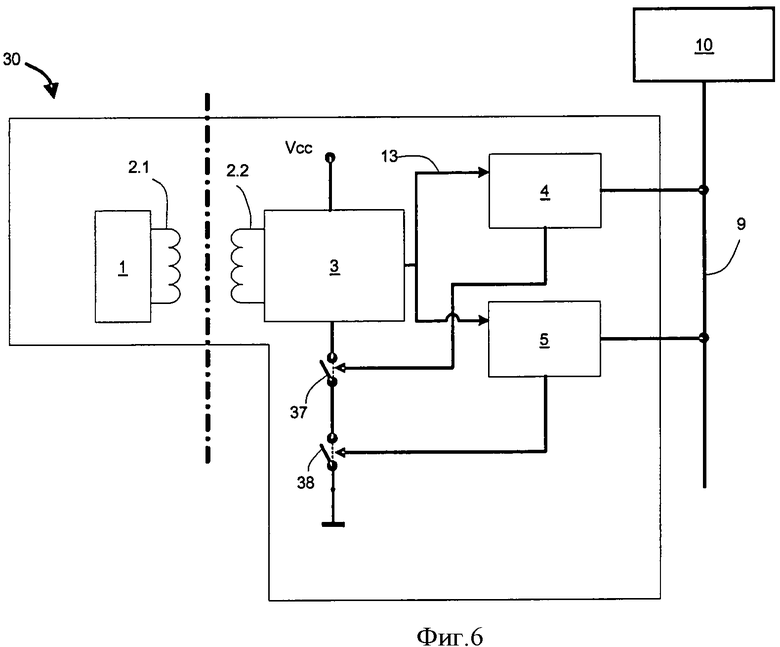
фигура 6 представляет шестой вариант выполнения системы контроля с резервной обработкой параметра статуса и двумя прерывателями для прерывания энергоснабжения считывающего код элемента;
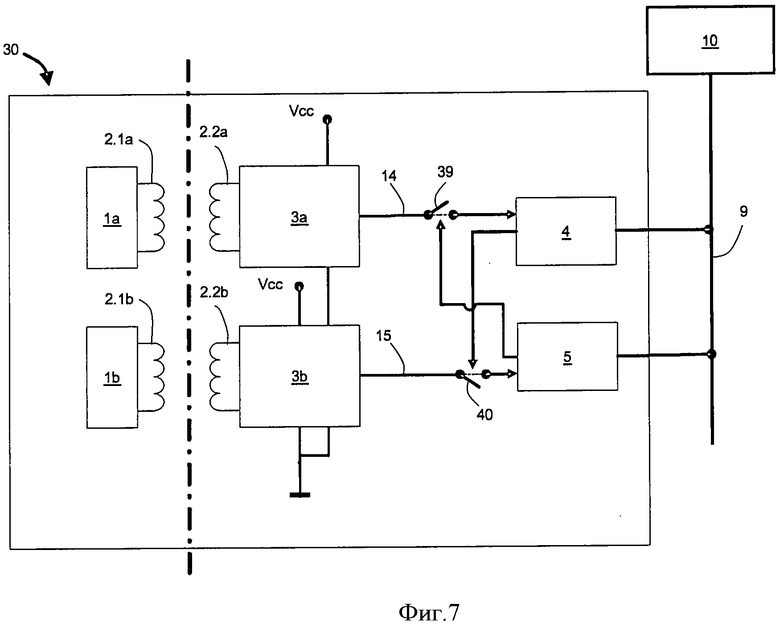
фигура 7 представляет седьмой вариант выполнения системы контроля с двумя системам RFID и одним первым прерывателем для прерывания одного первого провода передачи данных, а также с одним вторым прерывателем для прерывания одного второго провода передачи данных;
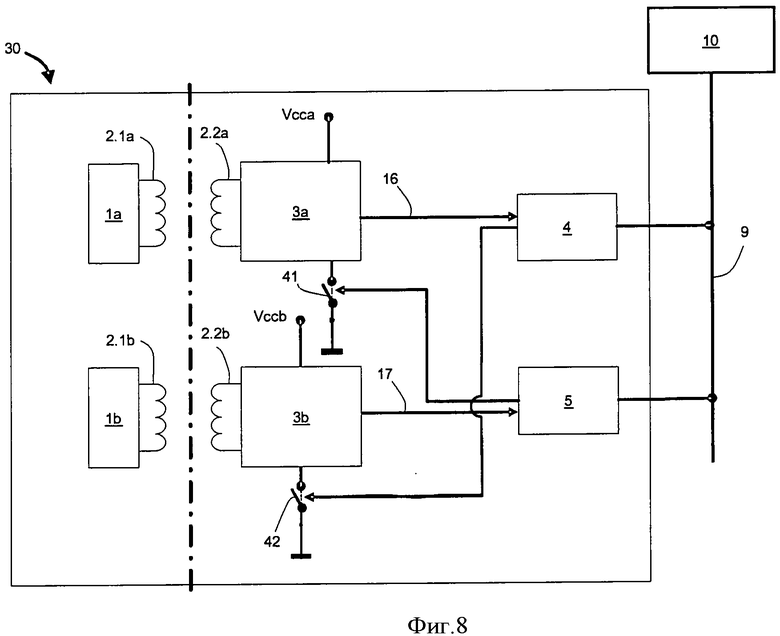
фигура 8 представляет восьмой вариант выполнения системы контроля с двумя системам RFID и одним первым прерывателем для прерывания энергоснабжения одного первого считывающего код элемента, а также одним вторым прерывателем для прерывания энергоснабжения одного второго считывающего код элемента;
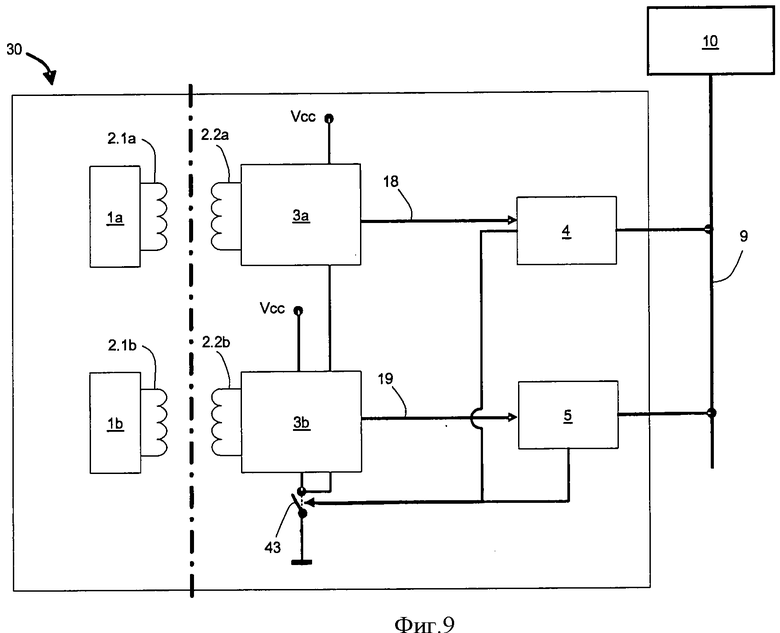
фигура 9 представляет девятый вариант выполнения системы контроля с двумя системам RFID и одним прерывателем для прерывания энергоснабжения двух считывающих код элементов;
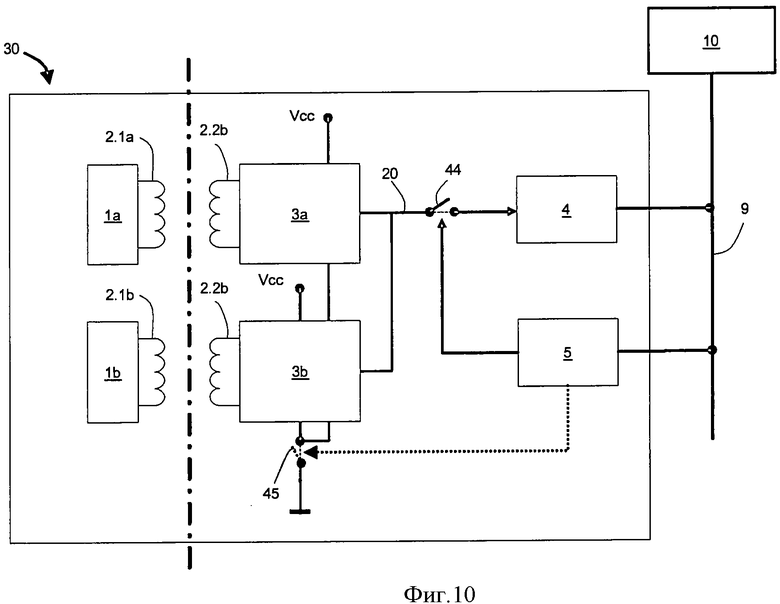
фигура 10 представляет десятый вариант выполнения системы контроля с двумя системам RFID и одним первым прерывателем для прерывания провода передачи данных или одним альтернативным прерывателем для прерывания энергоснабжения двух считывающих код элементов;
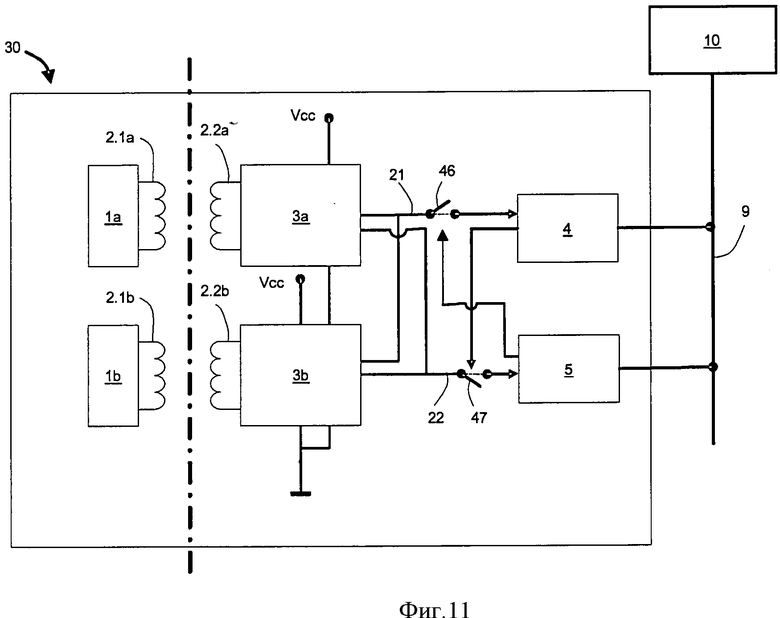
фигура 11 представляет одиннадцатый вариант выполнения системы контроля с двумя системам RFID, резервной обработкой параметра статуса и одним первым прерывателем для прерывания одного первого провода передачи данных, а также одним вторым прерывателем для прерывания одного второго провода передачи данных;
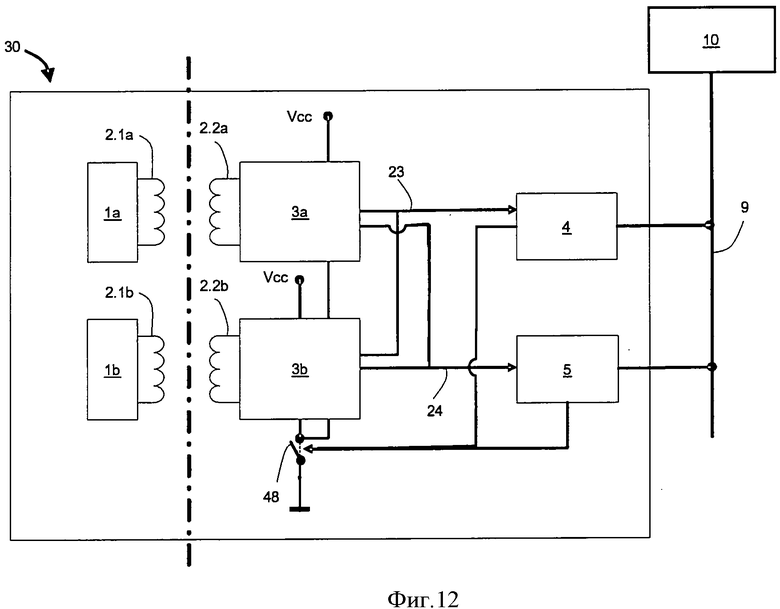
фигура 12 представляет двенадцатый вариант выполнения системы контроля с двумя системам RFID, резервной обработкой параметра статуса и одним прерывателем для прерывания энергоснабжения двух считывающих код элементов;
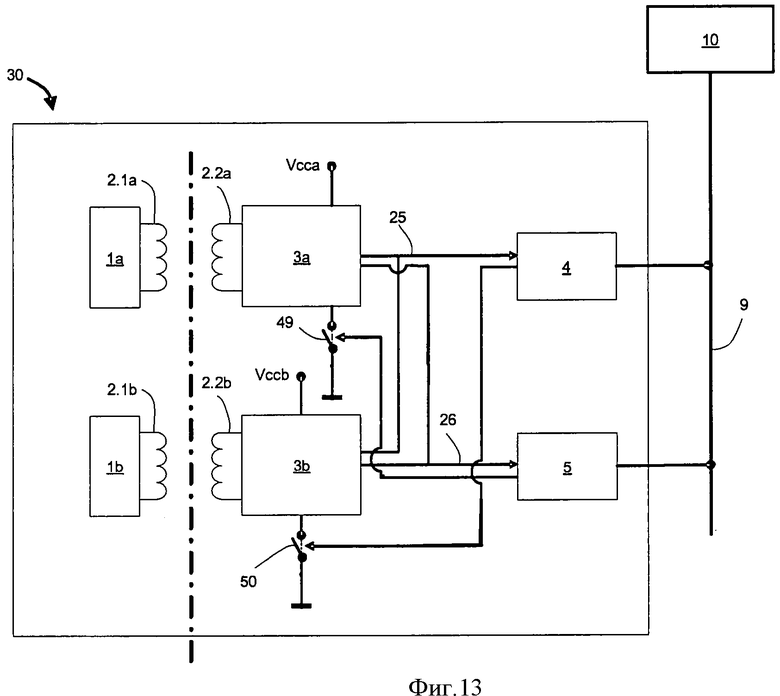
фигура 13 представляет тринадцатый вариант выполнения системы контроля с двумя системам RFID, резервной обработкой параметра статуса и одним первым прерывателем для прерывания энергоснабжения одного первого считывающего код элемента и одним вторым прерывателем для прерывания энергоснабжения одного второго считывающего код элемента;
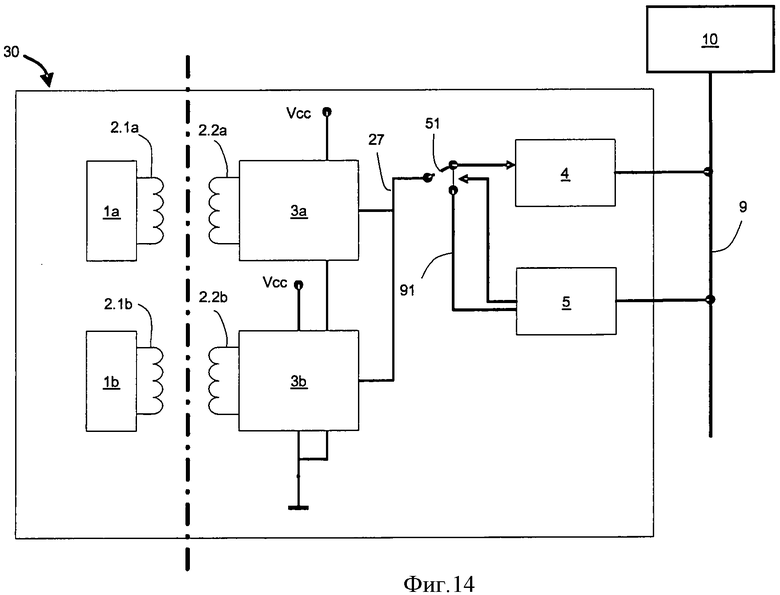
фигура 14 представляет четырнадцатый вариант выполнения системы контроля с двумя системам RFID и одним прерывателем для прерывания одного первого провода передачи данных и закрытия одного второго провода передачи данных;
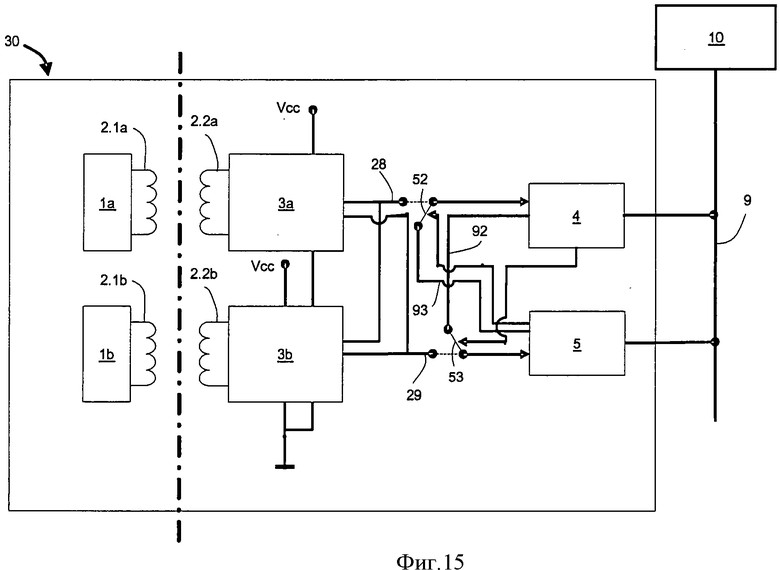
фигура 15 представляет пятнадцатый вариант выполнения системы контроля с двумя системам RFID, резервной обработкой и одним первым прерывателем для прерывания одного первого провода передачи данных и закрытия одного второго провода передачи данных, а также одним вторым прерывателем для прерывания одного третьего провода передачи данных и закрытия одного четвертого провода передачи данных.
На фигуре 1 показан первый вариант выполнения системы контроля, используемой, например, в лифте. Блок 10 управления соединен с шиной 9. Блок 10 управления коммуницирует через шину 9 с, по меньшей мере, шинным узлом 30. Блок 10 управления, шина 9 и, по меньшей мере, один шинный узел 30 образуют систему шин. В рамках этой системы шин каждый шинный узел 30 имеет однозначно идентифицируемый адрес. С помощью этого адреса сигналы от блока 10 управления целенаправленно передаются на определенный шинный узел 30. Входящие на блок 10 управления сигналы также можно однозначно привязать к одному шинному узлу 30.
Таким образом, между шинным узлом 30 и блоком 10 управления можно передавать данные в обоих направлениях через шину 9. Шинный узел 30 имеет для этого, по меньшей мере, два микропроцессора 4 и 5. Оба микропроцессора 4 и 5 выполнены таким образом, что первый микропроцессор 4 передает, по меньшей мере, данные о статусе на блок 10 управления, а второй микропроцессор 5 принимает, по меньшей мере, сигналы управления от блока 10 управления.
Два микропроцессора 4, 5 выполнены с возможностью как физической, так и виртуальной конфигурации. В случае двух физически конфигурированных микропроцессоров 4, 5, например, два микропроцессора 4, 5 размещены на одном кристалле микросхемы. В альтернативном варианте выполнения оба микропроцессора 4, 5 могут быть размещены каждый на отдельном кристалле микросхемы. Физически может присутствовать только один микропроцессор 4. В этом случае второй микропроцессор 5 может быть сконфигурирован виртуально программным обеспечением на первом физически присутствующем микропроцессоре 4.
Шинный узел 30 имеет кроме этого, по меньшей мере, один несущий код элемент 1 и один считывающий код элемент 3. Предпочтительно несущий код элемент 1 является электронной RFID-меткой 1, а считывающий код элемент 3 является системой RFID 3.
Ниже раскрываются варианты выполнения системы контроля согласно фигурам 1-15 на примере электронных RFID-меток 1 и систем RFID 3. В распоряжении специалиста находятся многочисленные технические возможности для реализации бесконтактной передачи идентификационного кода между несущим код элементом и считывающим код элементом. Так, например, альтернативно можно применять комбинации несущих код и считывающих код элементов 1, 3 в качестве носителя баркода и лазерного сканера, динамика и микрофона, магнитной ленты и датчика Холла, магнита и датчика Холла или источника света и светочувствительного сенсора.
Как RFID-метка 1, так и система RFID 3 имеют каждая по одной индукционной петле 2.1, 2.2. Система RFID 3 снабжает RFID-метку 1 через эту индукционную петлю электромагнитной энергией. Для этого система RFID 3 подключена к источнику питания Vcc. Источник питания снабжает систему RFID 3 предпочтительно или электрическим током, или электрическим напряжением. Пока RFID-метка 1 остается подключенной к энергоснабжению, она передает через индукционные петли 2.1, 2.2 сохраненный в памяти идентификационный код на систему RFID 3. Энергоснабжение Vcc RFID-метки 1 может быть обеспечено, если только RFID-метка 1 находится пространственно ниже критического зазора к системе RFID 3, а индукционная петля 2.1 RFID-метки 1 может быть возбуждена индукционной петлей 2.2 системы RFID 3. Энергоснабжение Vcc RFID-метки 1 функционирует, таким образом, только ниже критического зазора к системе RFID 3. При превышении критического зазора RFID-метка 1 получает недостаточно энергии для поддержания передачи идентификационного кода на систему RFID 3.
Система RFID 3 соединена через провод передачи данных 6 с первым микропроцессором 4 и передает принятый идентификационный код на этот микропроцессор 4. Микропроцессор 4 сравнивает идентификационный код с сохраненным в ячейке памяти перечнем идентификационных кодов. Во время такого сравнения микропроцессор 4 высчитывает по сохраненным в памяти правилам зависимости идентификационного кода параметр статуса. Этот параметр статуса может иметь положительное или отрицательное значение. Отрицательный параметр статуса генерируется, например, если на микропроцессор 4 не передается или передается фальшивый идентификационный код.
При наличии отрицательного параметра статуса микропроцессор 4 передает сигнал через шину 9 на блок 10 управления. Этот сигнал содержит адрес шинного узла 30 и, предпочтительно, идентификационный код проверенной RFID-метки 1. По сообщенному адресу блок 10 управления может локализовать причину отрицательного значения параметра статуса и начинает соответствующую реакцию.
Шинный узел 30 контролирует, например, статус дверей шахты лифта. RFID-метка 1 и система RFID 3 расположены в зоне дверей шахты таким образом, что при закрытых дверях шахты дистанция между RFID-меткой 1 и системой RFID 3 находится ниже критического зазора. Микропроцессор 4 принимает идентификационный код от системы RFID 3 и генерирует положительный параметр статуса. Если двери шахты открыты, RFID-метка 1 и система RFID 3 превышают критический зазор. Так как RFID-метка 1 и система RFID 3 больше не получают электроэнергию, RFID-метка 1 прекращает отсылку своего идентификационного кода, а микропроцессор 4 генерирует отрицательный параметр статуса. Соответственно микропроцессор 4 посылает сигнал на блок 10 управления. Блок 10 управления локализует по адресу шинного узла 30 открытые двери шахты. Если двери шахты открыты несанкционированно, например, в зоне дверей шахты нет кабины лифта, блок 10 управления начинает реакцию для приведения лифта в безопасное состояние.
Посредством RFID-метки 1 и системы RFID 3 шинного узла 30 статус других компонентов лифта, таких как дверь кабины, устройство запирания дверей, аварийная кнопка остановки или кнопка движения контролируется аналогичным способом.
Надежная эксплуатация шинного узла 30 зависит в первую очередь от работоспособности микропроцессора 4. Поэтому шинный узел 30 регулярно тестируется блоком 10 управления для контроля произвольной отсылки сигнала микропроцессором 4 при возникновении отрицательного параметра статуса.
Для тестирования шинного узла 30 согласно фигуре 1 блок 10 управления посылает через шину 9 на второй микропроцессор 5 команду управления открыть прерыватель 31. Этот прерыватель 31 разъединяет при этом провод 6 передачи данных между системой RFID 3 и первым микропроцессором 4. Микропроцессор 4 не принимает идентификационный код и генерирует отрицательный параметр статуса. Таким образом, симулируется «исчезновение» RFID-метки 1. При безупречном функционировании микропроцессора 4 последний самопроизвольно отмечается в блоке 10 управления.
Такой тест проводится повторно через определенное время для всех шинных узлов 30. Т.к. во время тестирования блок 10 управления не может распознать реальную информацию о статусе тестируемого шинного узла 30, время тестирования сокращается до возможного минимума, а тестирование проводится с максимально возможной необходимой частотой повторения. Время тестирования зависит главным образом от скорости передачи данных через шину 9 и времени срабатывания микропроцессоров 4, 5 и составляет, как правило, от 1 до 100 мсек. Частота проведения тестирования зависит в первую очередь от возможности выхода из строя всей системы. Чем надежнее вся система, тем реже можно проводить ее тестирование для обеспечения надежной работы компонентов лифта.
Как правило, тестирование проводится один раз ежедневно. Это тестирование может повторяться и через часовые или минутные промежутки.
Ниже раскрываются другие варианты выполнения системы контроля, в частности, контроля шинного узла 30. Т.к. принципиальная схема устройства шинного узла 30 и способ функционирования компонентов шины 1-5 в этих вариантах выполнения сравним, затрагиваются только различия в устройстве и способе функционирования различных шинных узлов 30.
На фигуре 2 показан второй вариант выполнения системы контроля. Второй микропроцессор 5 при тестировании шинного узла 30 приводит в действие прерыватель 32. При открытом прерывателе 32 энергоснабжение Vcc системы RFID 3 прерывается. При отключенном источнике питания Vcc система RFID 3 прекращает передачу идентификационного кодового сигнала через провод передачи данных 7 на микропроцессор 4.
На фигуре 3 показан третий вариант выполнения системы контроля. Второй микропроцессор 5 в этом варианте выполнения во время тестирования первого микропроцессора 4 приводит в действие прерыватель 33. Этот прерыватель 33 соединяет в первом положении систему RFID 3 через провод 8 передачи данных с первым микропроцессором 4 и во втором положении оба микропроцессора 4 и 5 через другой провод 90 передачи данных. Преимущество этого варианта выполнения состоит в том, что можно симулировать не только «исчезновение» RFID-метки 1, но и в том, что второй микропроцессор 5 может задавать различные идентификационные коды. Это имеет большое значение, в частности, если в зону приема системы RFID 3 могут попасть несколько RFID-меток 1 с различными идентификационными кодами. В зависимости от того, какой идентификационный код считает второй микропроцессор 4, он генерирует положительный или отрицательный параметр статуса.
На фигуре 4 показан четвертый вариант выполнения системы контроля. В этом варианте выполнения идентификационный кодовый сигнал через провод 11 передачи данных резервировано фиксируется и обрабатывается обоими микропроцессорами 4, 5. Если, по меньшей мере, один из двух микропроцессоров 4, 5 сгенерирует отрицательный параметр статуса, шинный узел 30 передаст сигнал на блок 10 управления. Преимущество этого четвертого варианта выполнения состоит в резервированной и поэтому очень надежной обработке идентификационного кода.
Во время тестирования шинного узла 30 один из микропроцессоров 4, 5 прерывает провод передачи данных 11 между системой RFID 3 и другим микропроцессором 5, 4 посредством прерывателя 34 или 35. Во время тестирования одного из двух микропроцессоров 4, 5 микропроцессор 4, 5, приводящий в действие прерыватель 34, 35 считывает реальный идентификационный код RFID-метки 1. В отличие от ранее описанных вариантов выполнения шинный узел 30 и дальше остается в состоянии передать реальный сигнал статуса на блок 10 управления. Блок 10 управления распознает поэтому отрицательные сообщения о статусе микропроцессора 4, 5, возникающие во время тестирования. В подобном случае не провоцируется, как ожидалось по результатам тестирования, только одно отрицательное сообщение о статусе, а шинный узел 30 передает два сигнала о статусе на блок 10 управления, один о виртуальном и один о реальном статусе. Ожидая только один сигнал о статусе, блок 10 управления в этом случае распознает, что у шинного узла 30 реально возник отрицательный статус.
На фигурах 5 и 6 показаны пятый и шестой варианты выполнения системы контроля. Согласно этим вариантам выполнения идентификационный кодовый сигнал обрабатывается обоими микропроцессорами 4, 5 резервировано через провода 12 или 13 передачи данных.
В пятом варианте выполнения блок 10 управления во время тестирования шинного узла 30 посылает на второй микропроцессор 5 команду управления на открытие прерывателя 36. В открытом положении прерывателя 36 энергоснабжение Vcc системы RFID 3 прерывается. В отличие от этого в шестом варианте выполнения энергоснабжение Vcc системы RFID 3 прерывается двумя прерывателями 37 и 38, каждый из которых приводится в действие вторым или первым микропроцессорами 5, 4. При отсутствии идентификационного кодового сигнала как первый, так и второй микропроцессоры 4, 5 посылают на блок управления соответствующие сигналы.
В последующих вариантах выполнения согласно фигурам 7-15 считываемые системами RFID За, ЗЬ идентификационные кодовые сигналы передаются по различным конфигурациям проводов передачи данных на, по меньшей мере, один микропроцессор 4, 5. Кроме этого показаны различные конфигурации прерывателей для тестирования шинного узла 30.
Согласно этим вариантам выполнения шинный узел 30 имеет две системы RJFID 3а, 3b, которые снабжают электроэнергией каждую из RFID-меток 1a, 1b через одну из индукционных петель 2.1а, 2.2а, 2.1b, 2.2.b и принимают переданный RFID-меткой 1а, 1b идентификационный кодовый сигнал.
Шинные узлы 30 с двумя системами RFID 3a, 3b или RFID-метками 1а, 1b могут либо резервировано отслеживать статус одного элемента лифта или же два различных статуса предпочтительно пространственно соседних элементов лифта. Таким образом, в лифтовой системе, например, посредством двух систем RFID За, ЗЬ и двух RFID-меток 1а, lb можно резервировано отслеживать статус одной двери шахты или два статуса одной двери кабины и одной аварийной кнопки, расположенной также на кабине лифта.
В вариантах выполнения, представленных на фигурах 7-9, обе системы RFID 3a, 3b передают зафиксированный идентификационный код через один из проводов 14, 15, 16, 17, 18, 19 передачи данных на один из микропроцессоров 4, 5. На фигуре 7 показан шинный узел 30, работоспособность которого обеспечивается взаимным прерыванием проводов 14, 15 передачи данных посредством одного из прерывателей 39, 40. Таким образом, первый микропроцессор 4 получает от блока 10 управления команду на прерывание провода 15 передачи данных на второй микропроцессор 5 прерывателем 40, а второй микропроцессор 5 получает от блока 10 управления команду на прерывание провода 14 передачи данных на первый микропроцессор 4 прерывателем 39.
В отличие от варианта выполнения, представленного на фигуре 7, на фигурах 8 и 9 показано провоцирование произвольного срабатывания микропроцессоров 4, 5 путем прерывания соответствующего энергоснабжения Vcca, Vccb системы RFID 3а, 3b. В варианте выполнения, представленном на фигуре 8, блок 10 управления дает команду одному первому микропроцессору 4, 5 на открытие прерывателя 41, 42 для энергоснабжения Vcca, Vccb соединенной со вторым микропроцессором 5, 4 системы RFID 3b, 3a и на его обратное закрытие.
В варианте выполнения, представленном на фигуре 9, в отличие от этого, оба микропроцессора 4, 5 приводят в действие один и тот же прерыватель 43, закрывающий энергоснабжение Vcc обеих систем RFID 3а, 3b. Если, например, первый микропроцессор 4 открывает прерыватель 43, то на блок 10 управления поступает самопроизвольный сигнал не только от второго микропроцессора 5, но и от первого микропроцессора 4. Сигналы от обоих микропроцессоров 4, 5 поступают на блок 10 управления, если прерыватель 43 приведен в действие вторым микропроцессором 5.
На фигуре 10 показан вариант выполнения, при котором две системы RFID 3а, 3b передают свой идентификационный код через провод 20 передачи данных на один первый процессор 4. Второй микропроцессор 5 тестирует работоспособность первого микропроцессора 4. Во время этого тестирования второй микропроцессор 5 приводит в действие прерыватель 44 и прерывает тем самым провод 20 передачи данных. В альтернативной конфигурации прерывателя 45 второй микропроцессор 5 прерывает энергоснабжение VCC обеих систем RFID 3а, 3b, задействовав прерыватель 74. Это альтернативная тестовая конфигурация обозначена на фигуре 10 пунктирной линией.
На фигурах 11-13 также показаны варианты выполнения системы контроля с двумя системами RFID 3а, 3b, снабжающими электроэнергией соответственно одну RFID-метку 1a, 1b и считывающими их идентификационные коды. Обработка считанных идентификационных кодов осуществляется затем резервировано, т.к. две системы RFID передают соответствующий считанный идентификационный код по одному из проводов 21, 22, 23, 24, 25, 26 передачи данных как на первый микропроцессор 4, так и на второй микропроцессор 5. Шинный узел 30 согласно этим трем вариантам выполнения тестируется различными способами.
Согласно фигуре 11 первый микропроцессор 4 управляет прерывателем 47 для открытия провода 22 передачи данных между вторым микропроцессором 5 и обеими системами RFID 3а, 3b. При этом тестируется самопроизвольное срабатывание микропроцессора 5. Второй микропроцессор 5 открывает во время тестирования первого микропроцессора 4 через следующий прерыватель 46 провод 21 передачи данных между первым микропроцессором 4 и системами RFID 3a, 3b и подает ему команду на передачу сигнала на блок 10 управления.
В варианте выполнения, представленном на фигуре 12, во время тестирования микропроцессоров 4, 5 энергоснабжение Vcc систем RFID 3а, 3b прерывается прерывателем 48. Этот прерыватель приводится в действие одним их микропроцессоров 4, 5. При срабатывании прерывателя 48 оба микропроцессора 4, 5 передают сигнал на блок 10 управления.
Вариант выполнения, представленный на фигуре 13, отличается от варианта, представленного на фигуре 12, тем, что системы RFID 3a, 3b имеют соответственно одно собственное энергоснабжение Vcca, Vccb. Кроме этого каждое энергоснабжение Vcca, Vccb можно по отдельности отключать отдельным прерывателем 49, 50. Это осуществляется соответственно одним из микропроцессоров 4, 5. На фигуре 13, например, микропроцессор 4 приводит в действие прерыватель 50 линии энергоснабжения Vccb, a микропроцессор 5 - прерыватель 49 линии энергоснабжения Vccf. При безупречной работе микропроцессоров 4, 5 они срабатывают одновременно при срабатывании прерывателя 49, 50, т.к., например, при отключении энергоснабжения Vcca отключается система RFID 3a и, соответственно, идентификационный код не передается ни на первый микропроцессор 4, ни на второй микропроцессор 5 по проводам передачи данных 25, 26.
На фигурах 14 и 15 показаны другие варианты выполнения системы контроля. В первом варианте согласно фигуре 14 второй микропроцессор 5 во время тестирования первого микропроцессора 4 приводит в действие прерыватель 51. Этот прерыватель 51 соединяет в первом положении прерывателя системы RFID 3а, 3b по проводу 27 передачи данных с первым микропроцессором 4, а во втором положении прерывателя - оба микропроцессора 4 и 5 по другому проводу 91 передачи данных. В варианте выполнения согласно фигуре 15 каждый из обоих микропроцессоров 4, 5 приводит в действие один прерыватель 52, 53, который в первом положении прерывателя соединяет системы RFID 3а, 3b по проводу 28, 29 передачи данных с другим микропроцессором 5, 4. Во втором положении каждый из микропроцессоров 4, 5 соединяется с другим микропроцессором 5, 4 по соответственно другому проводу 92, 93 передачи данных.
Преимущество этих двух вариантов выполнения состоит в том, что можно не только симулировать исчезновение RFID-метки 1a, 1b, но и в том, что управляемый прерывателем микропроцессор 4, 5 может задавать другому микропроцессору 5, 4 в том числе различные идентификационные коды. Это проявляется, в частности, тогда, когда в зону приема системы RFID 3a, 3b могут попасть несколько RFID-меток 1а, 1b с различными идентификационными кодами. В зависимости от того, какой идентификационный код считает первый или второй микропроцессор 4, 5, генерируется положительный или отрицательный параметр статуса.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДЛЯ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ЭЛЕКТРОХИРУРГИЧЕСКИХ ПРИСПОСОБЛЕНИЙ | 2019 |
|
RU2781421C1 |
| СИСТЕМА ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И ЗАХВАТА | 2008 |
|
RU2376168C1 |
| СПОСОБ И УСТРОЙСТВО СЧИТЫВАНИЯ RFID МЕТОК И ДЕТЕКТИРОВАНИЯ ЗАЩИТНОЙ МАРКИРОВКИ | 2015 |
|
RU2605922C1 |
| АВАРИЙНЫЙ ТОРМОЗ С ВОЗВРАТОМ В ИСХОДНОЕ ПОЛОЖЕНИЕ | 2012 |
|
RU2600424C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛИФТОВОЙ УСТАНОВКОЙ | 2010 |
|
RU2520637C2 |
| ПРОТИВОУГОННАЯ СИСТЕМА | 2008 |
|
RU2373083C1 |
| ПРОТИВОУГОННАЯ 5D-СИСТЕМА | 2011 |
|
RU2440901C1 |
| СПОСОБ ПРИЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ДЛЯ ИСПОЛЬЗОВАНИЯ С СИСТЕМАМИ ПЛАНИРОВАНИЯ РЕСУРСОВ ПРЕДПРИЯТИЯ | 2006 |
|
RU2408078C2 |
| СПОСОБ И СИСТЕМА ЗАЩИТЫ УНИВЕРСАЛЬНОГО КЛЮЧА | 2004 |
|
RU2389076C2 |
| УСОВЕРШЕНСТВОВАННАЯ СИСТЕМА ИДЕНТИФИКАЦИИ | 1998 |
|
RU2238585C2 |
Изобретение относится к области контроля лифтовых установок. Лифтовая установка содержит шинный узел (30), блок управления (10), шину (9), первый и второй микропроцессоры (4, 5). При тестировании шинного узла (30) для контроля произвольной отсылки сигнала первым микропроцессором (4) при возникновении отрицательного параметра статуса блок управления (10) передает по шине (9) на второй микропроцессор (5) команду открыть прерыватель (31). Прерыватель (31) разъединяет провод (6) передачи данных между системой RFID (3) и первым микропроцессором (4). Первый микропроцессор (4) не принимает идентификационный код и генерирует отрицательный параметр статуса. Таким образом, симулируют «исчезновение» RFID-метки (1). Достигается надежный контроль работоспособности первого микропроцессора (4). 2 н. и 10 з.п. ф-лы, 15 ил.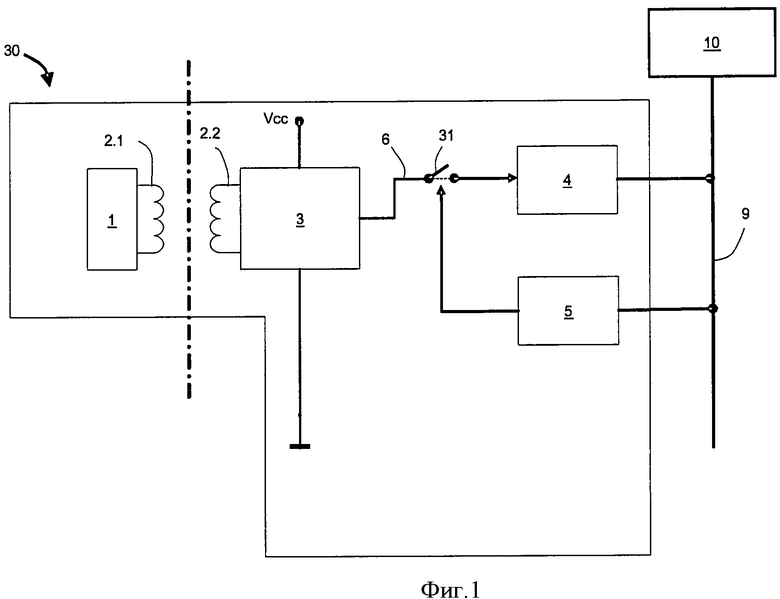
1. Лифт с блоком (10) управления, шиной (9), по меньшей мере, одним первыми микропроцессором (4, 5) и одним вторым микропроцессором (4, 5), снабженные шинным узлом (30) и соединенные через шину (9) с блоком (10) управления, отличающийся тем, что блок (10) управления передает по шине (9) на второй микропроцессор (4, 5) команду прервать передачу сигнала на первый микропроцессор (4, 5), после чего первый микропроцессор (4, 5) посылает на блок (10) управления сообщение о состоянии.
2. Лифт по п.1,
причем, по меньшей мере, один несущий код элемент (1) и, по меньшей мере, один считывающий код элемент (3) снабжены шинным узлом (30), причем считывающий код элемент (3) считывает бесконтактным способом идентификационный код несущего код элемента (19) и считывающий код элемент (3) передает сигнал на первый микропроцессор (4, 5).
3. Лифт по п.2,
причем несущий код элемент (1) и считывающий код элемент (3) имеют по одной индукционной петле (2.1, 2.2), считывающий код элемент (3) снабжает бесконтактным способом несущий код элемент (1) по обеим индукционным петлям (2.1, 2.2) электромагнитной энергией, а несущий код элемент (1) передает свой идентификационный код через две индукционные петли (2.1, 2.2) бесконтактным способом на считывающий код элемент (3).
4. Лифт по п.2,
причем считывающий код элемент (3) передает сигнал по проводу (6) передачи данных на, по меньшей мере, первый микропроцессор (4, 5).
5. Лифт по п.4,
причем второй микропроцессор (4, 5) приводит в действие прерыватель (31) для прерывания провода (6).
6. Лифт по п.2,
причем второй микропроцессор (4, 5) приводит в действие прерыватель (32) для прерывания энергоснабжения (Vcc) считывающего код элемента (3).
7. Лифт по любому из пп.1-5,
причем блок (10) управления подтверждает сообщение о состоянии первого микропроцессора (4, 5) на основе прерывания передачи сигнала вторым микропроцессором (4, 5).
8. Способ обмена данными лифта с блоком (10) управления, шиной (9), по меньшей мере, первым микропроцессором (4, 5) и, по меньшей мере, вторым микропроцессором (4, 5), снабженными шинным узлом (30) и соединенными через шину (9) с блоком (10) управления, причем способ включает следующие этапы:
- передают команду от блока (10) управления на второй микропроцессор (4, 5),
- на основе этой команды прерывают передачу сигнала на первый микропроцессор (4, 5) от второго микропроцессора (4, 5) и
- отправляют сообщение о состоянии первым микропроцессором (4, 5) на блок (10) управления.
9. Способ по п.8, с, по меньшей мере, несущим код элементом (1) и, по меньшей мере, считывающим код элементом (3), снабженными шинным узлом (30), причем
- идентификационный код несущего код элемента (1) считывают считывающим код элементом (3) бесконтактным способом и
- сформированный на основе идентификационного кода сигнал передают на первый микропроцессор (4, 5) считывающим код элементом (3).
10. Способ по п.9, причем
- сигнал передают по проводу (6) передачи данных от считывающего код элемента (3) на, по меньшей мере, первый микропроцессор (4, 5).
11. Способ по п.10, причем
- прерыватель (31) приводят в действие для прерывания передачи данных по проводу (6) вторым микропроцессором (4, 5) или
- прерыватель (32) приводят в действие для прерывания энергоснабжения (Vcc) считывающего код элемента (3) вторым микропроцессором (4, 5).
12. Способ по любому из пп.8-10, причем
- сообщение о состоянии первого микропроцессора (4, 5) на основании прерывания передачи сигнала вторым микропроцессором (4, 5) подтверждают блоком (10) управления.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| US 4567560 A, 28.01.1986 | |||

