Изобретение относится к промыслово-геофизической технике, а более конкретно - к аппаратуре электромагнитного каротажа нефтегазовых скважин, и может использоваться для измерения и изучения распределения удельного электрического сопротивления (УЭС) горных пород как вдоль оси скважины, так и в радиальном направлении, а также по направлениям, лежащим в плоскости перпендикулярной ее оси, например, с целью выделения трещинных коллекторов, исследования наклонно-направленных и горизонтальных скважин.
Электромагнитный каротаж заключается в расчленении горных пород в скважине на основе измерения относительных характеристик электромагнитного поля:
амплитудных, представляющих отношения вида  ,
,  ,
,  и фазовой Δφ=φ1-φ2, где h1 и h2 - напряженности магнитной компоненты поля в 1-й (ближней) и 2-й (дальней) точках измерения на оси скважины; φ1, φ2 - фазы векторов напряженности h1 и h2 соответственно. По измеренным амплитудным и (или) фазовой характеристикам судят об УЭС горных пород.
и фазовой Δφ=φ1-φ2, где h1 и h2 - напряженности магнитной компоненты поля в 1-й (ближней) и 2-й (дальней) точках измерения на оси скважины; φ1, φ2 - фазы векторов напряженности h1 и h2 соответственно. По измеренным амплитудным и (или) фазовой характеристикам судят об УЭС горных пород.
Для реализации электромагнитного каротажа в скважине размещаются генераторная (излучающая) катушка, возбуждающая в породах электромагнитное поле, и две (ближняя и дальняя) приемные (измерительные) катушки, воспринимающие магнитную компоненту поля, называемые трехэлементным зондом. При расположении магнитных моментов генераторной и приемных катушек перпендикулярно оси скважины (зонд электромагнитного каротажа с поперечным расположением катушек), возбуждаемое электромагнитное поле приобретает свойство азимутальной направленности в плоскостях, перпендикулярных оси зонда, т.е. токовые линии поля в пласте, вскрытом вертикальной скважиной, направлены в нем по определенному азимуту, зависящему от положения в пространстве генераторной катушки.
В промысловой геофизике большой интерес представляет выделение в разрезе скважины проницаемых пластов, называемых коллекторами. Некоторые из коллекторов, например трещинные, характеризуются преимущественно вертикальным направлением трещин и являются азимутально-неоднородными средами в отношении их УЭС, т.е. измеряемое УЭС зависит от направления токовых линий поля в них.
Пласт, вскрытый горизонтальной скважиной, также является средой неоднородной в плоскости, перпендикулярной оси скважины, из-за анизотропии пласта и наличия горизонтальных границ раздела.
Известно устройство для каротажного электромагнитного зондирования (авторское свидетельство СССР №1004940, МКП G01V 3/18, опубл. 15.03.83, бюл. №10), содержащее генератор, трехэлементные зонды, состоящие из генераторной и пары измерительных катушек, усилители мощности, усилители-преобразователи, генератор-гетеродин, усилители ограничители промежуточной частоты, фазоизмерительный блок, блок телеметрии и блок коммутации, электронные ключи генераторных и измерительных цепей трехэлементных зондов, при этом трехэлементные зонды выполнены геометрически и электродинамически подобными друг другу, генератор выполнен в виде генераторов рабочих частот по числу генераторных катушек трехэлементных зондов, число генераторов-гетеродинов соответствует числу пар измерительных катушек трехэлементных зондов.
Благодаря наличию набора разноглубинных геометрически и электродинамически подобных зондов это устройство позволяет измерять и изучать распределение УЭС горных пород как вдоль оси скважины, так и в радиальном направлении. Однако данное устройство не способно выделять в разрезах скважин азимутально неоднородные объекты, такие как трещинные коллекторы, так как в трехэлементных зондах используются катушки с продольным расположением магнитных моментов, не обладающие азимутальной направленностью.
Известно устройство для электромагнитного каротажа скважин (авторское свидетельство СССР №960701, МКП GO01V 3/18), состоящее из генератора высокой частоты, первой и второй генераторных катушек, первой, второй, третьей и четвертой приемных катушек, первого и второго входных коммутационных ключей, избирательного усилителя, восстановителя несущих колебаний, формирователя балансно-модулированных колебаний, делительной системы, блока коммутации, блока разделения информации. При этом вторая генераторная катушка пространственно совмещена с первой, а их оси взаимно перпендикулярны. Первая приемная катушка пространственно совмещена с третьей, и оси их взаимно перпендикулярны, вторая приемная катушка пространственно совмещена с четвертой, и их оси также взаимно перпендикулярны.
Формирователь балансно-модулированных колебаний состоит из генератора низкой частоты, ортогонального фазовращателя, первого и второго балансных модуляторов, первого и второго усилителей мощности.
Восстановитель несущих колебаний состоит из первого и второго частотных смесителей и сумматора.
Блок разделения информации содержит фильтр нижних частот, фильтр верхних частот и амплитудный преобразователь. Делительная система с избирательным усилителем и блок разделения информации выполняют функции преобразования и обработки информации.
В этом устройстве катушки зонда выполнены с поперечным расположением их магнитных моментов.
Благодаря питанию ортогональных генераторных катушек зонда токами, сдвинутыми по фазе на 90°, в горных породах создается непрерывно вращающееся магнитное поле, обладающее азимутальной направленностью, что дает возможность определять УЭС горных пород по различным азимутальным направлениям, одновременно получая информацию о распределении УЭС по оси скважины.
Недостатками этого устройства являются низкая точность измерения УЭС, высокая трудоемкость настройки при его изготовлении и эксплуатации, отсутствие возможности радиального зондирования.
Это связано с тем, что балансные модуляторы и усилители мощности формирователя балансно-модулированных колебаний должны иметь одинаковые коэффициенты преобразования и усиления, а ортогональные фазовращатели должны создавать два равных по амплитуде колебания, фазы которых должны отличаться точно на 90°.
Кроме того, частотные смесители восстановителя несущих колебаний должны иметь идентичные квадратичные характеристики.
Идентичные параметры должны иметь также первая и вторая генераторные катушки, первая и третья, вторая и четвертая приемные катушки.
Удовлетворить эти требования в процессе изготовления и эксплуатации устройства в широком диапазоне изменения температуры в скважине (до 150°C и более) практически невозможно.
Известно также устройство для электромагнитного каротажа скважин (патент РФ №2199135, опубл. 20.02.2003. Бюл. №5), состоящее из генератора высокой частоты, системы пространственно совмещенных генераторных катушек, размещенных на электроизоляционном стержне, систем ближних и дальних пространственно совмещенных приемных катушек, размещенных на электроизоляционном стержне, блока коммутации, усилительно-преобразовательного блока, блока разделения и обработки информации, коммутатора генераторных катушек, коммутатора приемных катушек.
Система генераторных катушек и системы ближних и дальних приемных катушек содержат по k генераторных, ближних приемных и дальних приемных катушек, соответственно, причем в каждой из систем катушек магнитные моменты катушек сдвинуты относительно друг друга на угол, равный 180°/k, и лежат в плоскостях, перпендикулярных оси электроизоляционного стержня, а магнитные моменты генераторных, ближних и дальних приемных катушек, имеющих одинаковые номера -компланарны.
В этом устройстве коммутатор генераторных катушек поочередно циклически подключает генераторные катушки к выходу генератора высокой частоты. Таким образом, вектор магнитного момента системы генераторных катушек дискретно на 180°/k изменяет свое направление в плоскости, перпендикулярной оси зонда.
Коммутатор приемных катушек синхронно подключает соответствующие приемные катушки к входу усилительно-преобразовательного блока, при этом осуществляется измерение УЭС горных пород по различным направлениям.
Недостатками данного устройства являются:
- взаимное влияние пространственно совмещенных приемных катушек друг на друга, что снижает точность измерения УЭС;
- большая дискретность измерений (малое азимутальное разрешение), обусловленная конструктивными трудностями пространственного совмещения как генераторных так и приемных катушек, что ограничивает число k≤5;
- отсутствие возможности радиального зондирования.
Известно также устройство для каротажного электромагнитного сканирования (индукционный наклономер) (Косолапов А.Ф., Сафиуллин Г.Г. и др. О методе индукционной пластово-трещинной наклонометрии // НТВ «Каротажник». Тверь: Изд. АИС, 2003. Вып.113. С 117-128), принятое за прототип, включающее вращающийся индукционный зонд, содержащий генераторную, приемную и компенсационные катушки, а также феррозондовый датчик азимута, генератор электромагнитных колебаний, электропривод вращающегося индукционного зонда, электронный блок, телеметрический канал связи и наземный блок.
При этом приемная катушка зонда подключена к входу электронного блока, а генераторная катушка - к выходу генератора электромагнитных колебаний, выход электронного блока соединен с телеметрическим каналом связи.
Генераторная и приемная катушки индукционного зонда имеют поперечные составляющие магнитных моментов.
Вращающийся индукционный зонд осуществляет непрерывное сканирование по окружности околоскважинного пространства направленным электромагнитным полем частотой 225 кГц. При этом непрерывно измеряется анизотропная составляющая удельной электропроводности горных пород. По результатам измерений выделяются зоны трещиноватости и определяются углы наклона и азимута падения пластов и трещин.
Недостатком этого устройства является малая глубинность исследования (0,5 м по радиусу). Из-за этого на результаты измерений влияет наряду с естественной трещиноватостью искусственная трещиноватость, образующаяся в прискважинной зоне при бурении скважины. Это влияние снижает достоверность скважинных измерений.
Другой недостаток - отсутствие возможности радиального зондирования вскрытых скважиной горных пород.
Задачами настоящего изобретения являются повышение достоверности результатов измерений и расширение функциональных возможностей устройства.
Поставленные задачи решаются тем, что в известное устройство для каротажного электромагнитного сканирования, содержащее k вращающихся трехэлементных разноглубинных зонда разных длин, каждый из которых состоит из генераторной, ближней и дальней приемных катушек, k генераторов рабочих частот, k-канальный усилительно-преобразовательный блок, включающий в каждом канале последовательно соединенные входные коммутаторы, избирательные усилители и преобразовательные тракты, блок обработки информации, блок управления, блок пространственной ориентации, блок телеметрии, электропривод, причем генераторные катушки зондов подключены к выходам генераторов рабочих частот, а приемные - к l…k входам усилительно-преобразовательного блока, l…k, выходы которого соединены с l…k входами блока обработки информации, выходы блока управления соединены с управляющим входом усилительно-преобразовательного блока, k+1 входом блока обработки информации и входом блока пространственной ориентации, выход которого которого подключен к k+2 входу блока информации, а его выход соединен с входом блока телеметрии, обмотка возбуждения электропривода подключена к питающей сети, магнитные моменты генераторных и приемных катушек k трехэлементных зондов перпендикулярны их осям, приемные катушки расположены на общем приемном электроизоляционном стержне, механически связанным с валом электропривода, дополнительно введены l…k генераторных электроизоляционных стержня, на которых размещены l…k генераторных катушек трехэлементных зондов, датчик угловой скорости вращения приемного электроизоляционного стержня, стабилизатор его частоты вращения и блок синхронизации, включающий датчик положения приемных катушек, формирователь сигналов управления и l…k исполнительных устройств, причем первый выход датчика угловой скорости подключен к входу стабилизатора частоты вращения, а второй - к входу блока управления, выходы стабилизатора частоты вращения соединены с обмоткой управления электропривода, выход датчика положения приемных катушек электрически связан с входом формирователя сигналов управления, его выходы подключены к входам l…k исполнительных устройств, валы которых механически связаны с l…k генераторными электроизоляционными стержнями.
Блок синхронизации может быть выполнен на основе системы сельсинов, при этом он содержит сельсин-датчик и k сельсин приемников, причем роторные обмотки сельсин датчика и сельсин-приемников подключены к питающей сети, а одноименные статорные обмотки сельсин-датчика и сельсин-приемников соединены между собой, ротор сельсин датчика механически связан с приемным электроизоляционным стержнем, а роторы l…k сельсин-приемников механически связаны соответственно с l…k генераторными электроизоляционными стержнями.
Датчик угловой скорости может быть выполнен на основе фотоэлектрических преобразователей. Он включает в себя кодовый диск, первый и второй фотоприемники, первый и второй формирователи импульсов, генератор опорной частоты, ключ, счетчик, формирователь импульсов сброса. Кодовый диск изготовлен из непрозрачного материала. В диске в радиальном направлении через равные угловые расстояния выполнены N сквозных щелей, а на переферии диска выполнено сквозное отверстие, при этом кодовый диск жестко закреплен на приемном электроизоляционном стержне таким образом, что ось упомянутого отверстия и магнитные моменты приемных катушек трехэлементных зондов перпендикулярны и лежат в одной плоскости, первый источник излучения и первый фотоприемник размещены по разные стороны кодового диска напротив друг друга и упомянутого отверстия в диске, второй источник излучения и второй фотоприемник размещены по разные стороны кодового диска напротив друг друга в интервале щелей в диске. Выход первого фотоприемника соединен с входом первого формирователя, выход которого является вторым выходом датчика угловой скорости, выход второго фотоприемника подключен к входу второго формирователя импульсов, первый выход которого соединен с управляющим входом ключа, а второй - с входом формирователя импульсов сброса, выход генератора опорной частоты подключен к входу ключа, выход которого соединен со счетным входом счетчика, а вход сброса счетчика подключен к выходу формирователя импульсов сброса, выход счетчика является первым выходом датчика угловой скорости.
Стабилизатор частоты вращения содержит цифроаналоговый преобразователь (ЦАП), интегратор, усилитель сигнала рассогласования, источник опорного напряжения и усилитель мощности, причем выход ЦАП соединен с входом интегратора, выход которого подключен к первому входу усилителя сигнала рассогласования, выход источника опорного напряжения соединен со вторым входом усилителя сигнала рассогласования, а выход последнего подключен к входу усилителя мощности, выходы которого являются выходами стабилизатора частоты вращения.
Блок пространственной ориентации содержит три феррозондовых датчика магнитного поля со взаимно ортогональными осями чувствительности, три акселерометрических датчика ускорения со взаимно ортогональными осями чувствительности, мультиплексор и аналого-цифровой преобразователь (АЦП), причем выходы феррозондовых и акселерометрических датчиков подключены к входам мультиплексора, а его выход соединен с входом АЦП, выход которого является выходом блока пространственной ориентации.
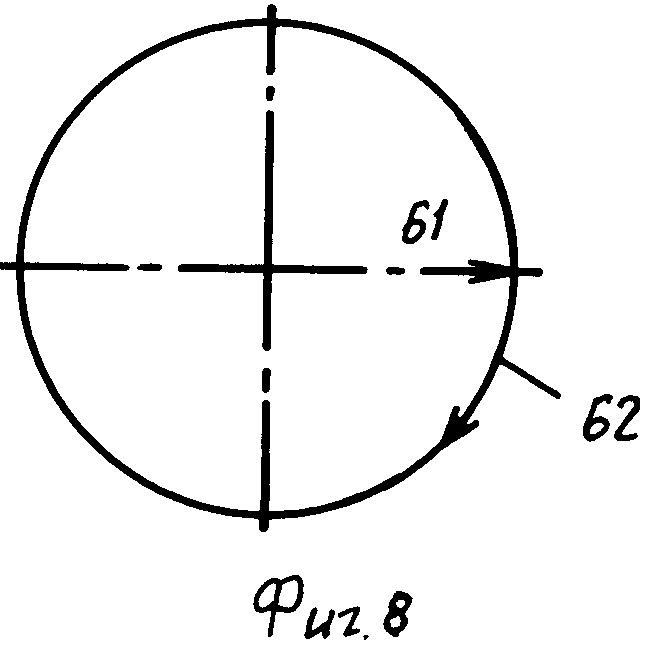
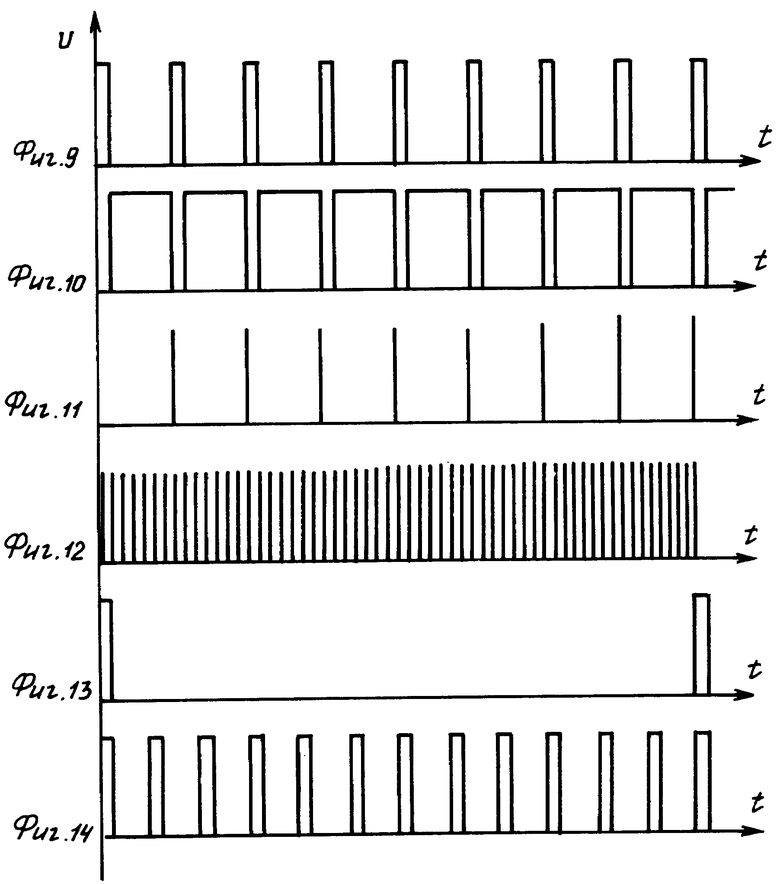
На фиг.1 представлена структурная схема устройства; на фиг.2 - схема выполнения блока синхронизации; на фиг.3 - схема выполнения датчика угловой скорости; на фиг.4 - конструкция кодового диска для N=8; на фиг.5 - схема выполнения стабилизатора частоты вращения; на фиг.6 - схема выполнения блока пространственной ориентации; на фиг.7 - схема расположения магнитных моментов катушек в рабочем режиме в плоскости, проходящей через ось трехэлементных зондов; на фиг.8 - схема расположения магнитных моментов катушек в плоскости, перпендикулярной оси трехэлементных зондов; на фиг.9-14 - формы напряжений U на выходах второго фотоприемника, второго формирователя импульсов; формирователя импульсов сброса, ключа, первого формирователя импульсов и блока управления, соответственно, в функции времени t.
Устройство содержит (фиг.1) генераторные катушки 11…1k, ближние 21…2k и дальние 31…3k приемные катушки трехэлементных зондов, генераторы 41…4k рабочих частот, k-канальный усилительно-преобразовательный блок 5, включающий входные коммутаторы 61…6k, избирательные усилители 71…7k и преобразовательные тракты 81…8k, блок 9 обработки информации, блок 10 управления, блок 11 пространственной ориентации, блок 12 телеметрии, электропривод 13, приемный электроизоляционный стержень 14, генераторные электроизоляционные стержни 151…15k, датчик 16 угловой скорости вращения приемного электроизоляционного стержня 14, стабилизатор 17 его частоты вращения и блок 18 синхронизации, включающий датчик 19 положения приемных катушек 21…2k, 31…3k, формирователь 20 сигналов управления и исполнительные устройства 211…21k. На фиг.1 схематически изображены также опоры 22 вращающихся приемного 14 и генераторных 151…15k электроизоляционных стержней.
Генераторные катушки 11…1k зондов подключены к выходам генераторов 41…4k рабочих частот, а приемные 21…2k и 31…3k - к информационным входам усилительно-преобразовательного блока 5, l…k, выходы которого соединены с l…k входами блока 9 обработки информации.
Выходы блока 10 управления соединены с управляющим входом усилительно-преобразовательного блока 5, k+1 входом блока 9 обработки информации и входом блока 11 пространственной ориентации, выход которого подключен к k+2 входу блока 9 обработки информации, а его выход соединен с входом блока 12 телеметрии. Обмотка возбуждения электропривода 13 подключена к питающей сети. Первый выход датчика 16 угловой скорости подключен к входу стабилизатора 17 частоты вращения, а второй - к входу блока 10 управления, выходы стабилизатора 17 частоты вращения соединены с обмоткой управления электропривода 13. В блоке 18 синхронизации выход датчика 19 положения приемных катушек электрически связан с входом формирователя 20 сигналов управления, а его выходы подключены к входам l…k исполнительных устройств 211…21k.
Приемные катушки 21…2k и 31…3k расположены на общем приемном электроизоляционном стержне 14, их магнитные моменты компланарны и перпендикулярны оси стержня 14. Генераторные катушки 11…1k расположены на генераторных электроизоляционных стержнях 151…l5k, их магнитные моменты перпендикулярны осям соответствующих стержней. Вал электропривода 13 механически связан с приемным электроизоляционным стержнем 14. Валы исполнительных устройств 211…21k механически связаны с генераторными электроизоляционными стержнями 151…15k соответственно.
Приемный электроизоляционный стержень 14 и генераторные электроизоляционные стержни 151…15k имеют общую ось вращения, совпадающую с осью трехэлементых зондов.
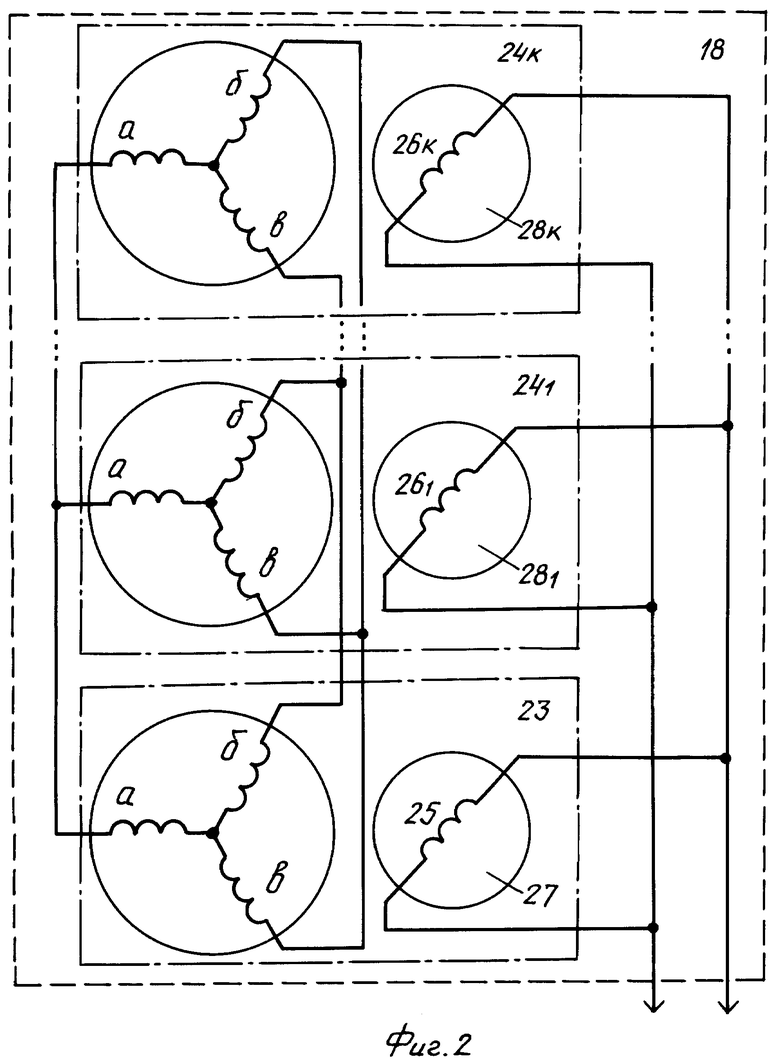
На фиг.2 представлен вариант исполнения блока 18 синхронизации на основе системы сельсинов, включающий сельсин-датчик 23 и l…k сельсин-приемники 241…24k, причем роторная обмотка 25 сельсин-датчик 23 и роторные обмотки 261…26k сельсин-приемников 241…24k подключены к питающей сети, а одноименные статорные обмотки «а», «б», «в» сельсин-датчика 23 и сельсин-приемников 241…24k соединены между собой, ротор 27 сельсин-датчика 23 механически связан с приемным электроизоляционным стержнем 14 (фиг.1), а роторы 281…28k сельсин-приемников 241…24k механически связаны с генераторными электроизоляционными стержнями 151…15k (фиг.1).
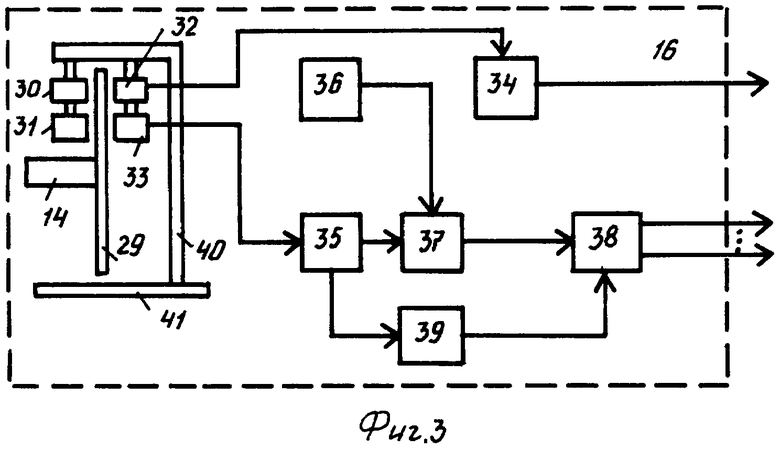
На фиг.3 изображен вариант выполнения датчика 16 угловой скорости. Он содержит кодовый диск 29, первый 30 и второй 31 источники излучения, первый 32 и второй 33 фотоприемники, первый 34 и второй 35 формирователи импульсов, генератор 36 опорной частоты, ключ 37, счетчик 38, формирователь 39 импульсов сброса.
Источники 30, 31 и фотоприемники 32, 33 закреплены на стойке 40, жестко связанной с шасси 41 устройства.
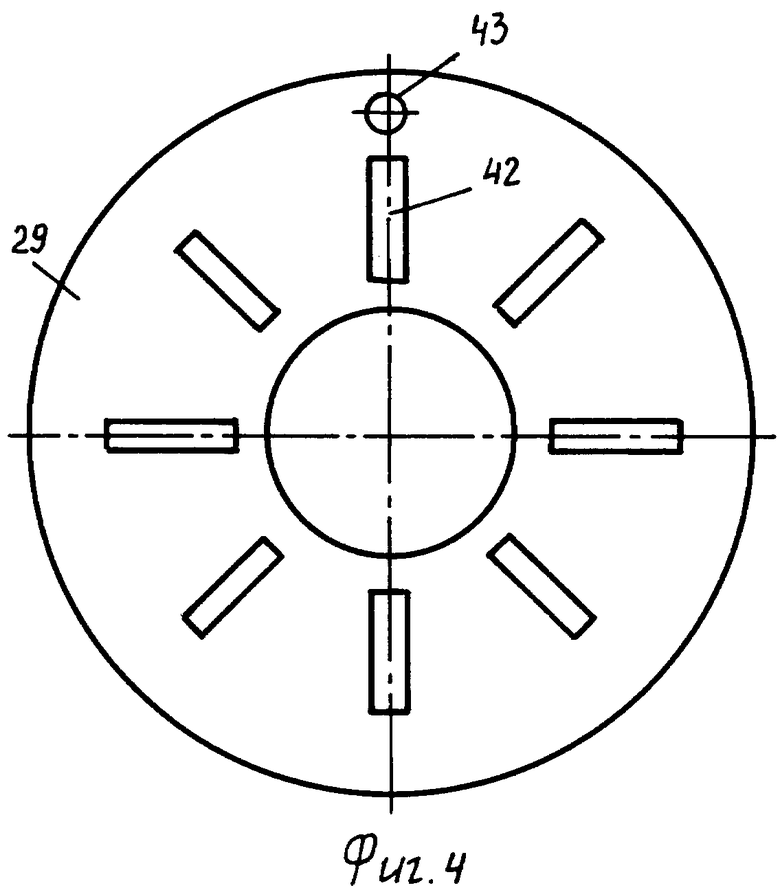
Конструкция кодового диска 29 приведена на фиг.4 Он изготовлен из непрозрачного материала. В диске в радиальном направлении через равные угловые расстояния выполнены N сквозных щелей 42 (в данном случае N=8), а на переферии диска выполнено сквозное отверстие 43. Кодовый диск 29 жестко закреплен на приемном электроизоляционном стержне 14 таким образом, что ось отверстия 43 и магнитные моменты приемных катушек 21…2k и 31…3k (фиг.1) трехэлементных зондов перпендикулярны и лежат в одной плоскости.
Первый источник 30 излучения и первый фотоприемник 32 размещены по разные стороны кодового диска 29 напротив друг друга и отверстия 43 в нем, второй источник 31 излучения и второй фотоприемник 33 размещены по разные стороны кодового диска напротив друг друга в интервале щелей 42 в нем. Выход первого фотоприемника 32 соединен с входом первого формирователя 34 импульсов, выход которого является вторым выходом датчика 16 угловой скорости. Выход второго фотоприемника 33 подключен к входу второго формирователя 35 импульсов, первый выход которого соединен с управляющим входом ключа 37, а второй - со входом формирователя 39 импульсов сброса, выход генератора 36 опорной частоты подключен к входу ключа 37, выход которого соединен со счетным входом счетчика 38, а вход сброса счетчика 38 подключен к выходу формирователя 39 импульсов сброса, выход счетчика 38 является первым выходом датчика 16 угловой скорости.
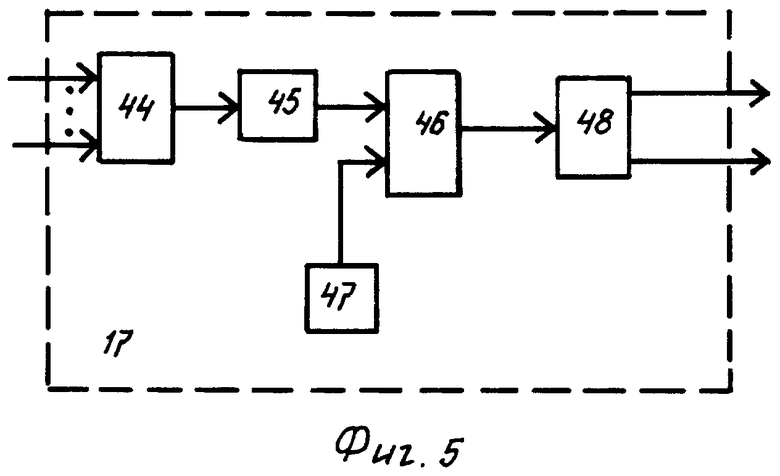
На фиг.5 представлена структурная схема стабилизатора 17 частоты вращения. Он содержит ЦАП 44, интегратор 45, усилитель 46 сигнала рассогласования, источник 47 опорного напряжения и усилитель 48 мощности. Выход ЦАП 44 соединен с входом интегратора 45, выход которого подключен к первому входу усилителя 46 сигнала рассогласования, выход источника 47 опорного напряжения соединен со вторым входом усилителя 46 сигнала рассогласования, а выход последнего подключен к входу усилителя 48 мощности, выходы которого являются выходами стабилизатора 17 частоты вращения.
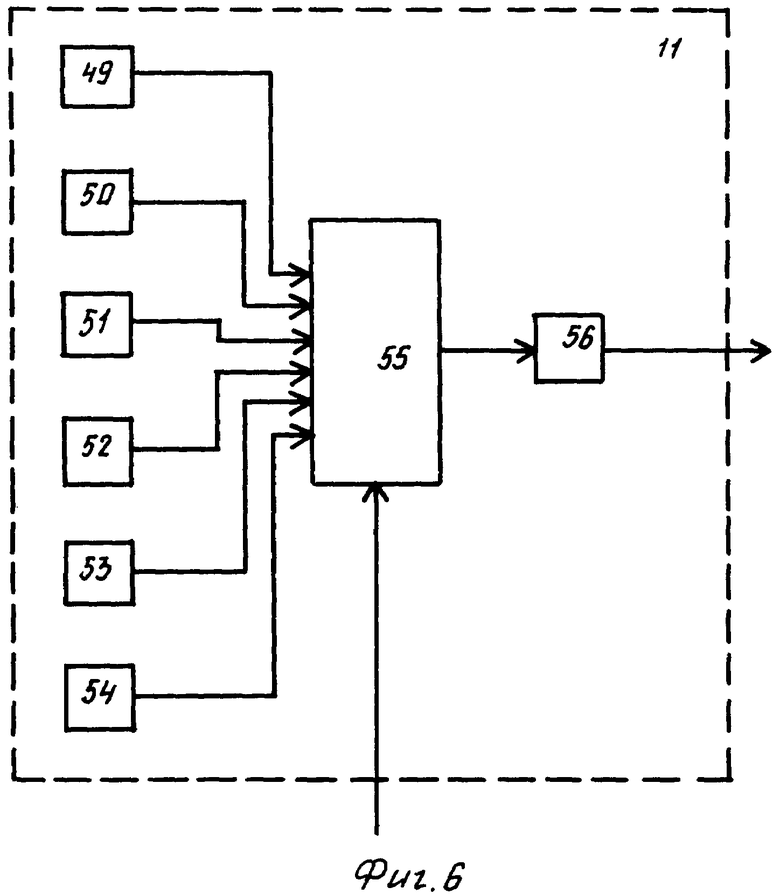
Блок 11 пространственной ориентации содержит три феррозондовых датчика 49, 50, 51, магнитного поля с взаимно ортогональными осями чувствительности, три акселерометрических датчика 52, 53, 54 ускорения, мультиплексор 55 и аналого-цифровой преобразователь (АЦП) 56. Выходы феррозондовых 49, 50, 51 и акселерометрических 52, 53, 54 датчиков подключены к входам мультиплексора 55, а его выход соединен с входом АЦП 56, выход которого является выходом блока 11 пространственной ориентации.
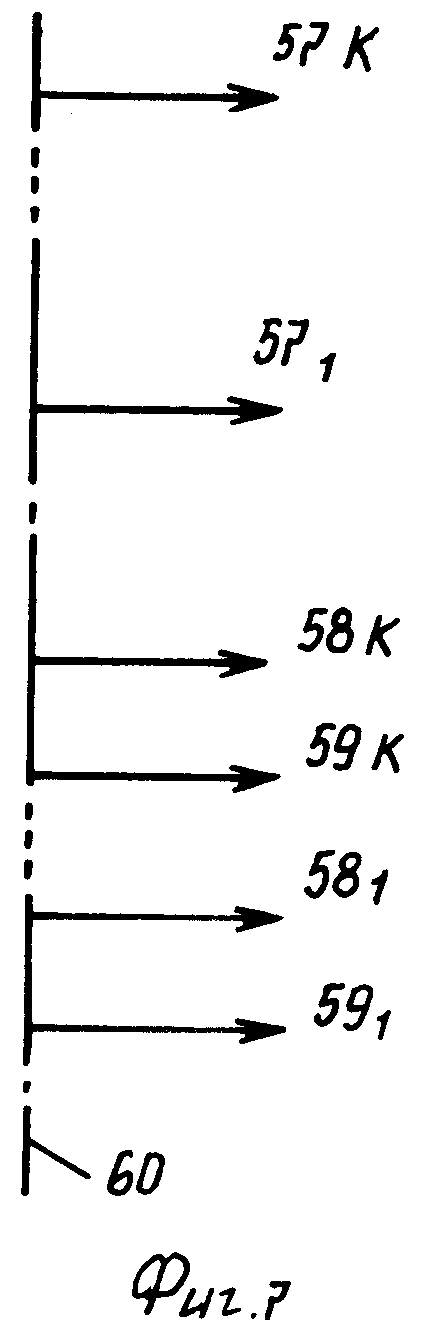
На фиг.7 изображены векторы 571…57k магнитных моментов генераторных катушек 11…1k трехэлементных зондов, векторы 581…58k ближних приемных катушек 21…2k, векторы 591…59k дальних приемных катушек 31…3k трехэлементных зондов, ось 60 вращения.
На фиг.8 изображены проекция 61 векторов магнитных моментов генераторных и приемных катушек трехэлементных зондов на плоскость перпендикулярную их оси, траектория 62 движения концов векторов магнитных моментов.
Устройство работает следующим образом.
При подаче питающих напряжений электропривод 13, в качестве которого могут использоваться электродвигатели постоянного или переменного токов, начинает вращать приемный электроизоляционный стержень 14 с расположенным на нем приемными катушками 21…2k и 31…3k трехэлементных зондов. При этом начинает вращаться кодовый диск 29 (см. фиг.3) датчика 16 угловой скорости и поток излучения от второго источника 31 излучения, в качестве которого может использоваться светодиод, будет прерываться непрозрачными секторами вращающегося кодового диска 29.
На выходе второго фотоприемника 33, в качестве которого может использоваться фототранзистор, при этом возникает импульсное напряжение (фиг.9), которое нормируется и инвертируется вторым формирователем 35 импульсов (фиг.10) и подается на управляющий вход ключа 37, а также на вход формирователя 39 импульсов сброса. Генератор 36 опорной частоты вырабатывает прямоугольные импульсы с частотой следования намного (в 104-105 раз) превышающей частоту (≈1 об./с) вращения кодового диска. Эти импульсы с выхода генератора 36 подаются на ключ 37, который открывается единичными импульсами с выхода формирователя 35, и поступают с выхода ключа на счетный вход счетчика 38 (см. фиг.12). Счетчик 38 подсчитывает число импульсов за время прохождения непрозрачного сектора кодового диска 29, при этом на его выходе формируется цифровой код, пропорциональный мгновенной угловой скорости вращения приемного электроизоляционного стержня с приемными катушками зондов. Для сброса счетчика 38 в начальное состояние используются короткие импульсы сброса (фиг.11), вырабатываемые формирователем 39 импульсов сброса по задним фронтам единичных импульсов формирователя 35.
С помощью первых источника 30 излучения, фотоприемника 32 и формирователя 34 формируются также импульсы (фиг.13), соответствующие по времени моментам прохождения отверстия 43 кодового диска 29 между источником 30 излучения и фотоприемником 32 и, соответственно, положению магнитных моментов приемных катушек трехэлементных зондов в эти отрезки времени. Период их следования равен периоду вращения приемного стержня 14. Далее цифровой код с выхода датчика 16 угловой скорости подается на вход стабилизатора 17 частоты вращения, а конкретно - на входы ЦАП 44 (фиг.5), где преобразуется в напряжение постоянного тока, пропорциональное мгновенной угловой скорости вращения приемного электроизоляционного стержня. Интегратор 45 устраняет высокочастотные составляющие в выходном напряжении ЦАП 44. С его выхода напряжение подается на первый вход усилителя 46 сигнала рассогласования. На второй вход усилителя 46 поступает напряжение от источника 47 опорного напряжения, эквивалентное заданной угловой скорости (частоте вращения) приемного электроизоляционного стержня 14.
На выходе усилителя 46 формируется разностный сигнал (сигнал рассогласования), который усиливается усилителем 48 мощности и с его выхода подается на обмотку управления электропривода 13 (фиг.1). В зависимости от знака сигнала рассогласования электропривод 13 либо увеличивает угловую скорость вращения вала, либо уменьшает ее, поддерживая постоянной частоту его вращения в пределах ошибки регулирования.
Для получения возможности радиального зондирования предлагаемое устройство содержит трехэлементные зонды разной длины, вплоть до 6-8 м, поэтому из конструктивных соображений разместить и генераторные, и приемные катушки на одном вращающемся электроизоляционном стержне невозможно. В связи с этим генераторные катушки 11…1k зондов размещены на отдельных генераторных электроизоляционных стержнях 151…15k, которые должны вращаться синхронно и синфазно с приемным электроизоляционным стержнем 14 с размещенными на нем приемными катушками.
Функцию обеспечения синхронности и синфазности вращения генераторных и приемного электроизоляционного стержней выполняет блок 18 синхронизации.
В варианте выполнения его на основе системы сельсинов (фиг.2) сельсин-датчик 23 играет роль датчика положения приемных катушек, система соединенных между собой статорных обмоток сельсинов - роль формирователя сигналов управления, роторы 281…28k сельсин-приемников 241…24k - роль исполнительных устройств.
Сельсины работают в индикаторном режиме, в котором роторы 281…28k сельсин-приемников 241…24k следуют за поворотом ротора 27 сельсин-датчика 23, который механически связан с приемным электроизоляционным стержнем 14. В этом режиме роторные обмотки 25, 261…26k сельсинов подключаются к сети переменного тока, питаемой от наземного генератора (не показан).
Магнитные поля, создаваемые роторными обмотками 25, 261…26k, индуцируют в обмотках «а», «б», «в» сельсин-приемников 241…24k и статорной обмотке сельсин-датчика 23 э.д.с, амплитудные значения которых в каждой фазе зависят от угла между осью ротора и осью статорной обмотки. Если углы поворотов роторов 281…28k сельсин-приемников 241…24k не равны углу поворота ротора 27 сельсин-датчика 23, то э.д.с, наводимые в статорных обмотках сельсин-приемников 241…24k, будут различными, вследствие чего в статорных обмотках будут протекать токи, значения которых определяются углами рассогласования между углом поворота ротора 27 сельсин-датчика 23 и углами поворота роторов 281…28k сельсин-приемников 241…24k.
В результате взаимодействия магнитных потоков, созданных роторными обмотками 261…26k, с токами статорных обмоток создаются вращающие моменты (сигналы управления)
М=qMm·sinΔα,
где Δα=α1-α2 - рассогласование углов поворота роторов сельсин-датчика и сельсинов-приемников; q - постоянный коэффициент, Mm - максимальное значение вращающего момента.
Под действием вращающих моментов роторы 281…28k устанавливаются в синфазное положение, в котором угол рассогласования с точностью до ошибки равен нулю.
При вращении ротора сельсин-датчика 23 роторы 281…28k сельсин-приемников будут также синхронно и синфазно вращаться.
Таким образом, стабилизатор 17 частоты вращения с датчиком 16 угловой скорости и блок 18 синхронизации обеспечивают синхронное и синфазное вращение с постоянной частотой приемного электроизоляционного стержня 14 с приемными катушками 21…2k, 31…3k и генераторных стержней 151…15k с генераторными катушками 11…1k. При этом векторы магнитных моментов генераторных и приемных катушек в каждый момент времени располагаются в одной плоскости, проходящей через ось вращения 60 (фиг.7), а их концы описывают траектории 62, являющиеся окружностями (фиг.8).
Питание генераторных катушек 11…1k осуществляется от генераторов 41…4k рабочих частот соответственно, которые вырабатывают высокочастотные электромагнитные колебания с частотами f1…fk для каждого их k трехэлементных зондов. Диапазон частот f1…fk - 0,1~10 МГц.
Направление и интенсивность излучения электромагнитных колебаний генераторными катушками 11…1k определяются их магнитными моментами. Под магнитным моментом понимается вектор, совпадающий с осью катушки и численно равный произведению n1'S1'I, где, n1' - число витков катушки; S1' - площадь витка; I - амплитуда тока, протекающего по виткам.
Электромагнитные волны, распространяясь по горным породам от генераторных 11…1k к приемным катушкам 21…2k, 31…3k, претерпевают затухание и фазовые сдвиги, зависящие от электрических характеристик горных пород и их структуры.
Величина сигналов в приемных катушках, индуцированных электромагнитными полями, также зависят от их магнитных моментов, представляющих собой векторы, совпадающие с осями катушек и численно равные произведению nПSП, где nП - число витков, SП - площадь витка катушки.
При прочих равных условиях величины сигналов максимальны в случае компланарности магнитных моментов генераторных и приемных катушек.
Амплитуды сигналов ближних и дальних приемных катушек, а также фазовый сдвиг Δφ между ними зависят также и от электрических параметров горных пород в направлении распространения электромагнитных волн.
Измерение УЭС горных пород по разным азимутальным направлениям осуществляется следующим образом. Импульсы (фиг.13) с выхода первого формирователя 34 импульсов датчика 16 угловой скорости (фиг.3) подаются на вход блока 10 управления, выполненного на основе микропроцессора. Период T следования этих импульсов равен периоду вращения трехэлементных зондов вокруг своей оси. Блок 10 управления формирует Q импульсов управления, где Q - число требуемых измерений УЭС за период вращения, задаваемое программно. Импульсы управления (фиг.14, для Q=12) следуют через равные промежутки времени  , причем первый по времени импульс управления совпадает с передним фронтом импульсов, поступающих от датчика 16 углового ускорения.
, причем первый по времени импульс управления совпадает с передним фронтом импульсов, поступающих от датчика 16 углового ускорения.
Таким образом, за один оборот зондов будут выполнены измерения по Q азимутальным направлениям через 360/Q градусов, например, при Q=12 через 30°.
Импульсы управления (фиг.14) подаются на управляющие входы входных коммутаторов 61…6k усилительно-преобразовательного блока 5, которые подключают приемные катушки 21…2k, 31…3k трехэлементных зондов к соответствующим усилительно-преобразовательным каналам. Сигналы приемных катушек усиливаются и разделяются по частотам избирательными усилителями 71…7k, преобразуются преобразовательными трактами 81…8k в цифровой вид и подаются в блок 9 обработки информации. Сюда же поступает информация от блока 11 пространственной ориентации, в котором феррозондовые датчики 49, 50, 51 (фиг.6) измеряют составляющие Mx, My, Mz магнитного поля Земли, а акселерометрические датчики 52, 53, 54, - составляющие Ax, Ay, Az поля ускорения силы тяжести. Выходные сигналы датчиков подключаются мультиплексором 55, управляемым блоком 10 управления, к входу АЦП 56, а с его выхода в цифровой форме поступают в блок 9 обработки информации.
Оси чувствительности феррозондовых 49, 50, 51 и акселерометрических 52, 53, 54 датчиков жестко связаны с базовой осью устройства, проходящей через ось вращения и первый фотоприемник 32 датчика 16 угловой скорости, что позволяет по результатам измерений блока 11 пространственной ориентации определить положение ее в пространстве, а следовательно, и магнитных моментов зондов в моменты их прохождения мимо фотоприемника.
Блок 9 обработки информации подготавливает пакеты данных в требуемом формате и передает их в блок 12 телеметрии, который осуществляет передачу данных по линии связи в наземную аппаратуру (не показана), где производится окончательная обработка информации. Рассчитываются значения амплитудных или/и фазовой относительных характеристик поля для каждого из разноглубинных трехэлементных зондов, определяются по ним удельные сопротивления, измеренные каждым зондом по разным азимутальным направлениям, определяются азимуты каждого из измерений, а также азимут искривления скважины и угол наклона ее оси.
Благодаря наличию в составе предлагаемого устройства зондов с различной радиальной глубинностью исследования зона искусственной трещиноватости, влияющая на показания малоглубинного короткого зонда, не оказывает влияния на показания зондов с большей глубинностью исследования, что позволяет выделять в разрезе зоны с естественной трещиноватостью и повысить достоверность скважинных измерений.
Устройство обладает также более широкими функциональными возможностями, так позволяет производить трехмерные (3D) измерения электрических параметров горных пород: вдоль скважины, в радиальном и азимутальном направлениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО КАРОТАЖА СКВАЖИН | 2001 |
|
RU2199135C1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ ЗОНДИРОВАНИЙ | 2009 |
|
RU2400780C1 |
| Устройство для каротажных электрических зондирований | 1985 |
|
SU1257593A1 |
| Устройство для электромагнитного каротажа | 1981 |
|
SU998995A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРИ БОКОВОМ КАРОТАЖЕ СКВАЖИН | 2009 |
|
RU2402047C1 |
| КОМПЛЕКСНАЯ ГЕОФИЗИЧЕСКАЯ АППАРАТУРА НА БУРИЛЬНЫХ ТРУБАХ (ВАРИАНТЫ) | 2009 |
|
RU2401944C1 |
| СПОСОБ БОКОВОГО КАРОТАЖА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2421759C1 |
| Устройство для электромагнитного каротажа скважин | 1981 |
|
SU960701A1 |
| Устройство для каротажного электромагнитного зондирования | 1981 |
|
SU1004940A1 |
| Устройство электромагнитного каротажа | 1987 |
|
SU1469490A1 |
Изобретение относится к геофизике и может использоваться для трехмерных (3D) измерений электрических параметров горных пород: вдоль скважины, в радиальном и азимутальном направлениях. Сущность: устройство содержит k вращающихся трехэлементных разноглубинных зондов, каждый из которых состоит из генераторной, ближней и дальней приемных катушек, k генераторов рабочих частот, k-канальный усилительно-преобразовательный блок, блок обработки информации, блок управления, блок пространственной ориентации, блок телеметрии, электропривод, приемный электроизоляционный стержень с размещенными на нем приемными катушками, l…k генераторных электроизоляционных стержней с размещенными на них генераторными катушками, датчик угловой скорости вращения приемного стержня, стабилизатор его частоты вращения и блок синхронизации. Блок синхронизации включает датчик положения приемных катушек, формирователь сигналов управления и l…k исполнительных устройств. Магнитные моменты генераторных и приемных катушек перпендикулярны осям зондов. Вал электропривода механически связан с приемным электроизоляционным стержнем. Валы l…k исполнительных устройств блока синхронизации механически связаны с l…k генераторными стержнями соответственно. Технический результат: повышение достоверности скважинных измерений и расширение функциональных возможностей. 4 з.п. ф-лы, 14 ил.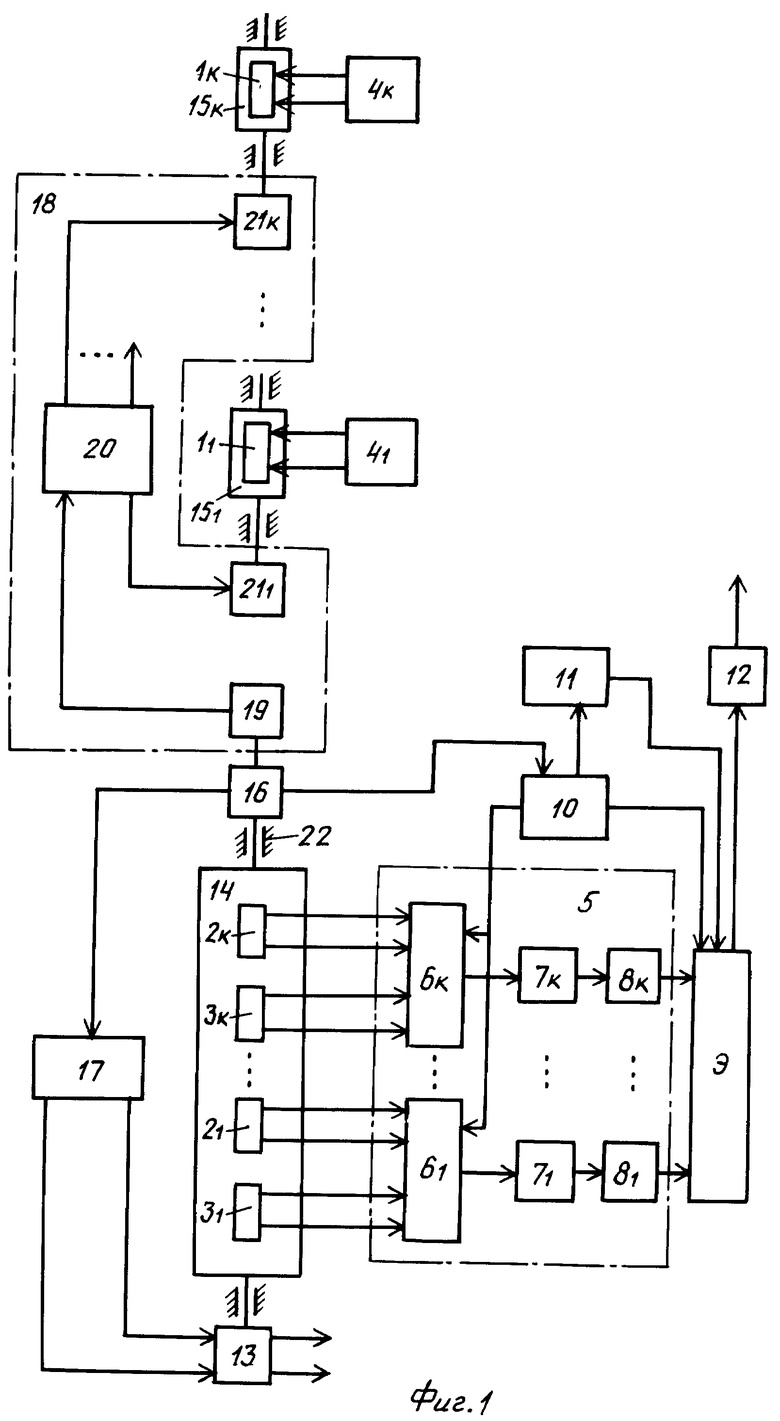
1. Устройство для каротажных электромагнитных сканирующих зондирований, содержащее k вращающихся трехэлементных разноглубинных зондов, каждый из которых состоит из генераторной, ближней и дальней приемных катушек, k генераторов рабочих частот, k-канальный усилительно-преобразовательный блок, включающий в каждом канале последовательно соединенные входной коммутатор, избирательный усилитель и преобразовательный тракт, блок обработки информации, блок управления, блок пространственной ориентации, блок телеметрии, электропривод, причем генераторные катушки зондов подключены к выходам генераторов рабочих частот, а приемные - к l…k входам усилительно-преобразовательного блока, l…k выходы которого соединены с l…k входами блока обработки информации, выходы блока управления соединены с управляющим входом усилительно-преобразовательного блока, k+1 входом блока обработки информации и входом блока пространственной ориентации, выход которого подключен к k+2 входу блока обработки информации, а его выход соединен с входом блока телеметрии, обмотка возбуждения электропривода подключена к питающей сети, магнитные моменты генераторных и приемных катушек трехэлементных зондов перпендикулярны их осям, приемные катушки зондов расположены на общем приемном электроизоляционном стержне, механически связанным с валом электропривода, отличающееся тем, что дополнительно введены l…k генераторных электроизоляционных стержня, на которых размещены l…k генераторных катушек трехэлементных зондов, датчик угловой скорости вращения приемного электроизоляционного стержня, стабилизатор его частоты вращения и блок синхронизации, включающий датчик положения приемных катушек, формирователь сигналов управления и l…k исполнительных устройств, причем первый выход датчика угловой скорости подключен к входу стабилизатора частоты вращения, а второй - к входу блока управления, выходы стабилизатора частоты вращения соединены с обмоткой управления электропривода, в блоке синхронизации выход датчика положения приемных катушек электрически связан с входом формирователя сигналов управления, а его выходы подключены к входам l…k исполнительных устройств, валы которых механически связаны с l…k генераторными электроизоляционными стержнями.
2. Устройство по п.1, отличающееся тем, что блок синхронизации выполнен на основе системы сельсинов, при этом он содержит сельсин-датчик и l…k сельсин-приемников, причем роторные обмотки сельсин-датчика и сельсин-приемников подключены к питающей сети, а одноименные статорные обмотки сельсин-датчика и сельсин-приемников соединены между собой, ротор сельсин-датчика механически связан с приемным электроизоляционным стержнем, а роторы l…k сельсин-приемников механически связаны, соответственно, с l…k генераторными стержнями.
3. Устройство по п.1, отличающееся тем, что датчик угловой скорости включает в себя кодовый диск, первый и второй источники излучения, первый и второй фотоприемники, первый и второй формирователи импульсов, генератор опорной частоты, ключ, счетчик, формирователь импульсов сброса, при этом кодовый диск изготовлен из непрозрачного материала и имеет выполненные в радиальном направлении N (N=8-16) сквозных щелей, а на периферии диска выполнено сквозное отверстие, кодовый диск жестко закреплен на приемном электроизоляционном стержне таким образом, что ось упомянутого отверстия и магнитные моменты приемных катушек трехэлементных зондов перпендикулярны и лежат в одной плоскости, первый источник излучения и первый фотоприемник размещены по разные стороны кодового диска напротив друг друга и упомянутого отверстия в диске, второй источник излучения и второй фотоприемник размещены по разные стороны кодового диска напротив друг друга в интервале щелей в диске, причем выход первого фотоприемника соединен с входом первого формирователя импульсов, выход которого является вторым выходом датчика угловой скорости, выход второго фотоприемника подключен к входу второго формирователя импульсов, первый выход которого соединен с управляющим входом ключа, а второй - со входом формирователя импульсов сброса, выход генератора опорной частоты подключен к входу ключа, выход которого соединен со счетным входом счетчика, а вход сброса счетчика подключен к выходу формирователя импульсов сброса, выход счетчика является первым выходом датчика угловой скорости.
4. Устройство по п.1, отличающееся тем, что стабилизатор частоты вращения приемного электроизоляционного стержня содержит цифроаналоговый преобразователь, интегратор, усилитель сигнала рассогласования, источник опорного напряжения и усилитель мощности, причем выход цифроаналогового преобразователя соединен с входом интегратора, выход которого подключен к первому входу усилителя сигнала рассогласования, выход источника опорного напряжения соединен со вторым входом усилителя сигнала рассогласования, а выход последнего подключен к входу усилителя мощности, выходы которого являются выходами стабилизатора частоты вращения.
5. Устройство по п.1, отличающееся тем, что блок пространственной ориентации содержит три феррозондовых датчика магнитного поля со взаимно ортогональными осями чувствительности, три акселерометрических датчика ускорения со взаимно ортогональными осями чувствительности, мультиплексор и аналого-цифровой преобразователь, причем выходы феррозондовых и акселерометрических датчиков подключены к входам мультиплексора, а его выход соединен с входом аналого-цифрового преобразователя, выход которого является выходом блока пространственной ориентации.
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО КАРОТАЖА СКВАЖИН | 2001 |
|
RU2199135C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО КАРОТАЖНОГО ЗОНДИРОВАНИЯ | 1995 |
|
RU2092875C1 |
| Устройство для бокового индукционного зондирования | 1980 |
|
SU930193A1 |
| Устройство для электромагнитного каротажа скважин | 1981 |
|
SU960701A1 |
| US 7382135 В2, 03.06.2008 | |||
| US 6556015 В1, 29.04.2003 | |||
| US 4472684 А, 18.09.1984 | |||
| КОСОЛАПОВ А.Ф | |||
| и др | |||
| О методе индукционной пластово-трещинной наклонометрии | |||
| НТВ «Каротажник», Тверь, АИС, 2003, вып.113, с.117-128. | |||

