Настоящее изобретение относится к способу регулирования активной ходовой части рельсового транспортного средства, содержащей, по меньшей мере, одну первую единицу с двумя колесами, при котором, с помощью, по меньшей мере, одного исполнительного элемента, который функционирует между первой колесной единицей и структурой транспортного средства, опирающейся на нее через первую первичную подвеску, в зависимости от фактической кривизны рельсового пути в первом диапазоне частот осуществляется установка угла поворота первой колесной единицы вокруг вертикальной оси ходовой части относительно структуры транспортного средства и/или во втором диапазоне частот установка угла поворота первой колесной единицы вокруг вертикальной оси ходовой части относительно структуры транспортного средства осуществляется таким образом, что поперечным движениям, вызванным нарушениями положения рельсового пути или синусоидальным ходом, оказывается противодействие, по меньшей мере, первой колесной единицей. Далее изобретение относится к устройству для регулирования активной ходовой части рельсового транспортного средства, а также оснащенному предложенным в соответствии с изобретением рельсовому транспортному средству.
В основе ходовых частей рельсовых транспортных средств лежит, как правило, конфликт целей между устойчивостью хода при движении с высокими скоростями на прямых и хорошим поведением при проходе кривых. Устойчивость хода при высоких скоростях движения на прямых требует жесткого продольного ведения колесных единиц (колесные пары или скаты), в то время как хорошее поведение при проходе дуг требует установки колесных единиц по радиусу дуги и таким образом мягкого шарнирного соединения. У известных решений в области ширококолейных железных дорог транспортные средства при хорошем поведении при проходе поворотов, как правило, имеют обусловленную устойчивостью высокую скорость, которая существенно меньше, чем у высокоскоростных поездов, которые предусмотрены для трасс с небольшим числом поворотов или для трасс, имеющих большие радиусы дуг. Ходовые части высокоскоростных поездов опять же мало благоприятны для поворотов. Пассивные решения всегда, могут достигаться только компромиссом между этими обоими противоречащими требованиями.
При очень узких дугах, как это, например, имеет место в городских транспортных сетях, в добавление к этому из физических оснований отказывает способность колесных единиц автоматически устанавливаться в соответствии с радиусом дуги. Чтобы преодолеть этот недостаток, к примеру, в DE 19861086 А1 предлагается активная система установки по радиусу дуги колесных пар, которая не может внести какого-либо вклада в стабилизацию поведения при движении при почти не встречающихся в области городского транспорта высоких скоростях движения.
В противоположность этому из DE 10137443 А1 известно решение, которое устраняет описанный выше конфликт целей. Для ходовой части с установленными с возможностью отклонения на поворотной раме колесными парами описывается способ регулирования и соответствующее устройство, с помощью которых достигаются оптимизированное для обеих задач поведение движения. Так с помощью регулирования в первом, предпочтительно низком диапазоне частот достигается установка колесных пар в соответствии с имеющейся кривизной дуги рельсового пути, в то время как во втором предпочтительном более высоком диапазоне частот уравновешиваются реакции на нарушения положения рельсового и предотвращается возбуждение неустойчивости.
Как в части привлекаемых для регулирования входных величин, так и настройки устанавливающего колесные пары исполнительного элемента, а также его принципа действия и расположения в ходовой части рельсового транспортного устройства в DE 10137443 А1 приводится ряд альтернативных решений, которые выполняют все поставленные задачи. Недостаток этого регулирования, однако, заключается в том, что вследствие соблюдения идеальной линии в режиме движения на колесах при случае возникает сравнительно быстро очень четко очерченная картина износа, в результате чего срок службы колес при данных обстоятельствах существенно уменьшается.
В связи с этим в основе настоящего изобретения лежит задача предложить способ и устройство указанного вида, который или которые не имеют названных выше недостатков или, по меньшей мере, имеют их в уменьшенном размере и, в частности, простым и доступным способом позволяют изменить в лучшую сторону условия износа колес.
Настоящее изобретение решает эту задачу исходя из способа в соответствии ограничительной частью пункта 1 формулы изобретения с помощью признаков, приведенных в отличительной части пункта 1. Оно решает эти задачи, исходя от устройства согласно ограничительной части пункта 25 с помощью признаков, приведенных в отличительной части пункта 25.
В основе настоящего изобретения заложено то, что улучшение условий износа колес может быть достигнуто простым и доступным способом, если в соответствующем диапазоне частот для регулирования применяется заданная величина, которая соответствует заданной идеальной величине, умноженной на задаваемый поправочный коэффициент. В этом случае с помощью поправочного коэффициента появляется возможность направленно корректировать регулирование по отношению к идеальному регулированию, осложненному локальным износом колес, без необходимости отказываться от преимуществ идеального регулирования. Оказалось, что уже при небольшом, определенном отклонении от идеального регулирования может быть достигнуто как при хорошем поведении при проходе поворота, так и хорошей устойчивости на прямом пути существенно лучшее распределение износа на поверхностях качения колес, благодаря чему получается существенно более благоприятная картина износа и, следовательно, более длительный срок службы.
При этом может быть предусмотрено, что также при необходимости и на более длинных участках осуществляется идеальное регулирование, т.е. упомянутый поправочный коэффициент выбирается равным единице, и только время от времени регулирование определенным образом отличается по отношению к идеальному регулированию, т.е. упомянутый поправочный коэффициент выбирается не равным единице. Далее может быть предусмотрено, что корректировка регулирования в отношении идеального регулирования с помощью поправочного коэффициента изменяется, например, постоянно по задаваемой временной кривой. Благодаря этому может достигаться любое распределение износа.
Установочные движения в обоих диапазонах частот могут известным способом накладываться друг на друга, причем они могут оказывать воздействие на соответствующую колесную единицу при необходимости через один единственный исполнительный элемент.
В связи с этим согласно изобретению предусмотрено, что установка угла поворота первой колесной единицы в первом диапазоне частот осуществляется при применении первой заданной величины, которая соответствует первой заданной идеальной величине, умноженной на задаваемый первый поправочный коэффициент (K1), причем заданная идеальная величина выбирается так, что в случае совпадения первой заданной величины с первой заданной идеальной величиной (т.е. K1=1) при фактической кривизне рельсового пути существует, по меньшей мере, приближенная радиусу дуги установка первой колесной единицы. Дополнительно или в качестве альтернативы предусмотрено, что установка угла поворота во втором диапазоне частот осуществляется при применении второй заданной величины, которая соответствует второй заданной идеальной величине, умноженной на задаваемой второй поправочный коэффициент (K2), причем первая заданная идеальная величина выбирается так, что в случае совпадения первой заданной величины с первой заданной идеальной величиной (т.е. K1=1) поперечные движения, вызванные нарушениями положения рельсов или синусоидальным ходом компенсируются, по меньшей мере, в основном первой колесной единицей.
Предпочтительно в случае совпадения первой заданной величины с первой заданной идеальной величиной при фактической кривизне рельсового пути имеет место точная установка по радиусу дуги первой колесной единицы и возвратный поворачивающий момент первой первичной подвески находится в основном в равновесии с поворачивающим моментом, получающимся из сцепления колесо-рельс, так что, по меньшей мере, один первый исполнительный элемент не должен в данный момент создавать в основном какого-либо поворачивающего момента.
Таким образом, при проходе поворота в первом диапазоне частот предпочтительно допускается, что исполнительный элемент, следует движению выворачивания колесной единицы, обусловленному кривизной рельсового пути, пока как при пассивной благоприятной для прохода поворота ходовой части происходит установка колесной единицы, по меньшей мере, приближенная радиусу дуги. Благодаря этому при случае может отпадать надобность в измерении или другом определении фактической кривизны рельсового пути, а при необходимости только с помощью нагрузки действующей в первом диапазоне частот на исполнительный элемент, устанавливается, что имеет место установка по радиусу дуги, или с помощью параметров ходовой части и фактического режима езды (скорость езды, поперечное ускорение) делается заключение о требуемом угле поворота для точной установки в соответствии с радиусом дуги. Это имеет преимущество, заключающееся в том, что в сравнении с, как правило, требующим больших или меньших затрат определением фактической кривизны рельсового пути в сопровождении может достигаться заметно меньшая задержка времени.
В этом месте следует учесть, что разрешение или чередование пассивного движения выворачивания колесной единицы представляет независимую от применения поправочных коэффициентов, самостоятельную, способную к охране изобретательскую идею.
В предпочтительном варианте предложенного в соответствии с изобретением способа предусмотрено, что в первом диапазоне частот, по меньшей мере, одним первым исполнительным элементом, таким образом, сопровождается движение поворота колесной единицы, обусловленное изменением кривизны рельсового пути, что, по меньшей мере, первый исполнительный элемент в случае совпадения первой заданной величины с первой заданной идеальной величиной при фактической кривизне рельсового пути в данный момент в первом диапазоне не создает в основном какого-либо поворачивающего момента.
При первом диапазоне частот, т.е. подгонке угла поворота к движению по дуге, концепция регулирования базируется на балансе поворачивающих моментов (или силовых пар), действующих вокруг вертикальной оси транспортного средства, на соответствующую колесную единицу при установке колесной единицы по радиусу дуги. Он рассчитывается:

где MTx - поворачивающий момент силовой пары, (например, силовая пара сил продольного буксования), получающейся в точках поднятия колес из зацепления колесо - рельс;
Мсхр - поворачивающий момент возвратных сил первичной подвески;
MAkt - поворачивающий момент составляющих перестановочных усилий исполнительного элемента в первом диапазоне частот.
В только что описанном сопровождении первого исполнительного элемента при отсутствии нагрузки (MAkt=0) при первой заданной идеальной величине из уравнения (1) таким образом получается:

Этот вариант предложенного в соответствии с изобретением регулирования в конечном счете означает, что поворачивающий момент возвратных сил первичной подвески компенсирует поворачивающий момент, получающийся из зацепления колесо-рельс, как имеет место в случае при пассивной благоприятной к дуге ходовой части (без исполнительного элемента). При этом другими словами копируется пассивная благоприятная к дуге ходовая часть, причем на исполнительном элементе при выворачивании из соответствующего положения предпочтительным способом при необходимости затрачивается минимальная энергия, чем при способе с активным, зависящим от кривизны рельсового пути сопровождении угла поворота. При необходимости исполнительный элемент только почти без нагрузки переводится в соответствующее положение. Но в то время как пассивные благоприятные к дуге ходовые части из-за уменьшенной продольной жесткости шарнирного соединения колесной пары имеют только отграниченную устойчивость, этот недостаток устранен в предложенном в соответствии с изобретением активном регулировании.
С помощью первого поправочного коэффициента K1 первая заданная величина, примененная при регулировании, может корректироваться в отношении первой заданной идеальной величины. Благодаря этому, как упоминалось, может достигаться избыточное или недостаточное компенсирование, что, однако, связано с расходом энергии и имеет следствие MAkt≠0. При K1=0 может даже реализоваться жесткое шарнирное соединение колесной пары как у традиционного пассивного транспортного средства.
При этом исполнительному элементу для его отклонения может задаваться прерывистое или непрерывное новое заданное идеальное значение, при котором в этом случае получается подлежащее достижению ненагруженное состояние. Другими словами заданная идеальная величина прерывисто или непрерывно сопровождается движением выворачивания и таким образом фактической кривизной рельсового пути. В качестве задающего воздействия для сопровождения заданной идеальной величины может применяться любая величина, которая представительна для ненагруженного состояния исполнительного элемента. Эта величина предпочтительно выбирается в зависимости от принципа измерения, с помощью которого определяется нагрузка на исполнительный элемент.
Сопровождение первой идеальной заданной величины, соответствующее кривизне рельсового пути, может осуществляться любым подходящим способом. Предпочтительно регистрируются угол поворота первой колесной единицы и величина, представляющая нагрузку на исполнительный элемент (например, величина силы, величина моментов, величина давления, величина тока и т.д.). Если нагрузка на исполнительный элемент отклоняется от нуля, то задается соответствующая новая первая заданная идеальная величина. Это может осуществляться прерывисто или непрерывно, причем может обеспечиваться, например, с помощью временной интеграции величины, представляющей нагрузку на исполнительный орган так, что в первом диапазоне частот регистрируется только ситуация с нагрузкой на исполнительный элемент.
В случае первой заданной идеальной величины речь может идти о любой пригодной величине, с помощью которой может достигаться желаемая установка колесной единицы. В частности, при необходимости может применяться величина, непосредственно представляющая отсутствие нагрузки на исполнительный элемент. Предпочтительно первая заданная идеальная величина представляет первый заданный идеальный угол поворота (φz1si), который сопровождается кривизной рельсового пути.
Как уже упоминалось выше, может быть предусмотрено, что первый поправочный коэффициент (K1) выбирается, по меньшей мере, эпизодически не равным единице, чтобы достигнуть распределение износа по поверхностям качения. Дополнительно или в качестве альтернативы может быть предусмотрено, что первый поправочный коэффициент (K1) выбирается, по меньшей мере, эпизодически равным единице, чтобы в это время обеспечить поведение движения, по меньшей мере, приближенное к идеальной линии. Равным образом дополнительно или в качестве альтернативы может быть предусмотрено, что первый поправочный коэффициент (K1) варьируется по задаваемой кривой, причем, в частности, возможна постоянная вариация, чтобы достичь благоприятного распределения износа.
Описанное выше регулирование в предпочтительном первом варианте предложенного в соответствии с изобретением способа может осуществляться для всех колесных единиц ходовой части, так что для всех в конечном счете может копироваться поведение прохода кривых, как при пассивной благоприятной при прохождении дуги ходовой части. Как, в частности, видно из уравнения (1), хотя с помощью этого регулирования и не достигается идеального представления прохода дуги при MTx=0 (т.е. без поворачивающего момента, получающегося из зацепления колесо-рельс) и компенсированных обусловленных радиусом дуги поперечных сил рельсов, однако при более высокой достижимой устойчивости движения с очень небольшим расходом энергии могут быть получены очень хорошие качества в части прохода дуги и в плане снижения износа.
Сумма боковых поперечных сил, действующих на рельсах на дуге, может быть, например, для типичного рельсового транспортного средства, кузов которого через соответственно одну вторичную подвеску опирается на две ходовые части, из которых соответственно каждая с двумя колесными единицами, для ходовой части движущейся впереди в направлении движения соответственно может быть рассчитана:


и движущейся следом в направлении движения ходовой части


где ΣY1 - сумма боковых сил на рельсах на соответствующей движущейся впереди в направлении движения колесной единице;
ΣY1 - сумма боковых сил на рельсах на соответствующей движущейся следом в направлении движения колесной единице;
Faq - центробежная сила, действующая на рельсовое транспортное средство;
MTx1 - поворачивающий момент из зацепления колесо-рельс на соответствующей движущейся впереди в направлении движения колесной единице;
MTx2 - поворачивающий момент из зацепления колесо-рельс на соответствующей движущейся следом в направлении движения колесной единице;
Mcxz - поворачивающий момент, создаваемый возвратными силами соответствующей вторичной подвески;
2а - осевое расстояние между колесными единицами на соответствующей ходовой части.
Оказалось, что улучшение по отношению к пассивно регулируемому по радиусу проходу дуги (MAkt=0 MTx=-Мсхр) возможно только с достойным упоминания расходом энергии на исполнительном элементе (MAkt>>0), чтобы приблизиться к идеальному представлению о проходе дуги (MTx=0 и ΣY1=ΣY2). Разумеется, с помощью описанных ниже вариантов предложенного в соответствии с изобретением способа возможно достижение при соответственно уменьшенном расходе энергии хорошее приближение к идеальному проходу дуги.
Итак, в предпочтительном втором варианте предложенного в соответствии с изобретением способа предусмотрено, что ходовая часть включает вторую колесную единицу с двумя колесами, движущуюся следом за первой колесной единицей, на которую через вторую первичную подвеску опирается структура транспортного средства. Угол поворота второй колесной единицы устанавливается с помощью, по меньшей мере, одного второго исполнительного элемента, действующего между второй колесной единицей и структурой транспортного средства. В то время как установка угла поворота первой колесной единицы осуществляется согласно приведенному выше первому варианту (т.е. MAkt=0), установка угла поворота второй колесной единицы осуществляется в первом диапазоне частот при применении третьей заданной величины, которая соответствует третьей заданной идеальной величине, умноженной на задаваемый третий поправочный коэффициент (K3). При этом третья заданная идеальная величина выбирается таким образом, что в случае совпадения третьей заданной величины с третьей заданной идеальной величиной (т.е. K3=1) поворачивающий момент, получающийся из зацепления колесо-рельс при фактической кривизне рельсового пути противоположно равен поворачивающему моменту на второй колесной единице, получающемуся при фактической кривизне рельсового пути из зацепления колесо-рельс (т.е. MTx1=-MTx2).
Из уравнений (3)-(6) следует


Таким образом достигается, что суммы боковых сил на рельсах ΣY1 и ΣY2 уравновешены за исключением составляющей возвратных сил соответствующей вторичной подвески.
В случае третьей заданной идеальной величины речь может идти о любой подходящей величине, с помощью которой может достигаться желаемая установка колесной единицы. Предпочтительно третья заданная идеальная величина представлена третьим заданным идеальным углом поворота (φz3si), который предпочтительно рассчитывается по поворачивающему моменту (MTx1) на первой колесной единице, получающемуся из зацепления колесо-рельс при фактической кривизне рельсового пути, задаваемой для ходовой части зависимости поворачивающего момента (Мсхр2) второй первичной подвески от угла поворота (φz3) второй колесной единицы и задаваемой для ходовой части зависимости поворачивающего момента (MAkt2) второго исполнительного элемента от угла поворота (φz3) второй колесной единицы. Такая зависимость поворачивающего момента (MAkt2) второго исполнительного элемента от угла поворота (φz3) второй колесной единицы может быть задана любым способом, например, с помощью заранее определенного уравнения, характеристикой или параметрической поверхностью и т.д., которая заранее была определена для транспортного средства.
Также и здесь с помощью третьего поправочного коэффициента (K3) снова достигается любая, при необходимости зависящая от времени корректировка примененной третьей заданной величины в отношении третьей заданной идеальной величины. Так, третий поправочный коэффициент (K3) подобно первому поправочному коэффициенту (K1) может выбираться, по меньшей мере, эпизодически не равным единице, и/или выбираться, по меньшей мере, периодически равным единице, и/или варьироваться по задаваемой кривой.
В предпочтительном третьем варианте предложенного в соответствии с изобретением способа предусмотрено, что, по меньшей мере, один первый исполнительный элемент в первом диапазоне частот сопровождается движением поворота первой колесной единицы, обусловленным изменением кривизны рельсового пути, таким образом, что, по меньшей мере, один первый исполнительный элемент при совпадении первой заданной величины с первой заданной идеальной величиной при фактической кривизне рельсового пути мгновенно создает в первом диапазоне частот поворачивающий момент, который противоположен и равен поворачивающему моменту первичной подвески (т.е. MAkt1=Mcxp1).
В усовершенствованном третьем варианте способа, предложенного в соответствии с изобретением, ходовая часть имеет вторую колесную единицу с двумя колесами, движущуюся следом за первой колесной единицей, на которую через вторую первичную подвеску оперта структура транспортного средства, и угол поворота второй колесной единицы устанавливается с помощью, по меньшей мере, одного второго исполнительного элемента, действующего между второй колесной единицей и структурой транспортного средства. При этом предпочтительно, чтобы вторая колесная единица была выполнена с возможностью регулирования. Установка угла поворота второй колесной единицы осуществляется в первом диапазоне частот при применении третьей заданной величины, которая соответствует третьей заданной идеальной величине, умноженной на задаваемый третий поправочный коэффициент (K3). Третья заданная величина выбирается таким образом, что в случае совпадения третьей заданной величины с третьей заданной идеальной величиной (т.е. K3=1), по меньшей мере, один второй исполнительный элемент в первом диапазоне частот сопровождается движением поворота второй колесной единицы, обусловленным изменением кривизны рельсового пути, таким образом, что, по меньшей мере, один второй исполнительный элемент при фактической кривизне рельсового пути мгновенно в первом диапазоне частот создает поворачивающий момент, который противоположен и равен поворачивающему моменту второй первичной подвески (т.е. MAkt2=-Мсхр2).
Следовательно, здесь при установке по радиусу дуги первой колесной единицы из уравнения (1) следует обращение в нуль поворачивающего момента из зацепления колесо-рельс (MTx2=0) и из уравнений (3)-(6):

Таким образом, уравновешиваются суммы боковых сил на рельсах ΣY1 и ΣY2 за исключением составляющей возвратных сил соответствующей вторичной подвески.
В случае первой и/или третьей заданной идеальной величины речь может идти о любой подходящей величине, с помощью которой может быть достигнута желаемая установка данной единицы. Здесь также предпочтительно, что первая и/или третья заданная идеальная величина представляет первый и/или третий заданный идеальный угол поворота (φz1si, φz3si), который сопровождается кривизной рельсового пути.
Сопровождение первой заданной идеальной величины или первого заданного идеального угла поворота (φz1i), соответствующее кривизне рельсового пути, может осуществляться любым пригодным способом. Предпочтительно регистрируется угол поворота первой колесной единицы и величина, представляющая нагрузку на исполнительный элемент (например, величина силы, величина момента, величина давления, величина тока и т.д.). Если нагрузка на исполнительный элемент отклоняется от той, которая получалась бы при этом угле поворота из возвратного момента первичной подвески, задается новая первая заданная идеальная величина или заданный идеальный угол поворота (φz1i)
Также и в этом случае, как описано выше, с помощью первого поправочного коэффициента (K1) снова достигается любая, при необходимости зависящая от времени, ситуации при движении и/или от ситуации на участке пути корректировка примененной первой заданной величины в отношении первой заданной идеальной величины. Так первый поправочный коэффициент (K1) может выбираться, по меньшей мере, эпизодически не равным единице, и/или выбираться, по меньшей мере, эпизодически равным единице, и/или варьироваться по задаваемой кривой.
В предпочтительном четвертом или пятом варианте предложенного в соответствии с изобретением способа ходовая часть имеет вторую колесную единицу с двумя колесами, движущуюся следом за первой колесной единицей, на которую через вторую первичную подвеску оперта структура транспортного средства, и угол поворота второй колесной единицы устанавливается с помощью, по меньшей мере, одного второго исполнительного элемента, действующего между второй колесной единицей и структурой транспортного средства. Далее структура транспортного средства через вторичную подвеску опирается на первую колесную единицу и вторую колесную единицу. При этом предусмотрено, что первая колесная единица регулируется по приведенному выше первому варианту (MAkt=0) или по третьему варианту (MAkt1=-Mcxp1), в то время как установка угла поворота второй колесной единицы осуществляется в первом диапазоне частот при применении третьей заданной величины, которая соответствует третьей заданной идеальной величине, умноженной на задаваемый третий поправочный коэффициент (K3). При этом третья заданная идеальная величина выбирается таким образом, что в случае совпадения третьей заданной величины с третьей заданной идеальной величиной (т.е. K3=1), поворачивающий момент на второй колесной единице, получающийся при фактической кривизне рельсового пути из зацепления колесо-рельс, соответствует разности поворачивающих моментов, которая получается из произведения коэффициента направления движения (L) на фактически имеющийся возвратный поворачивающий момент во вторичной подвеске и величину поворачивающего момента на первой колесной единице, получающегося при фактической кривизне рельсового пути из зацепления колесо-рельс, причем коэффициент направления движения (L) для движущейся впереди ходовой части равен 1 и движущейся следом ходовой части равен -1 (т.е. MTx2=Mcxs-MTx1 для движущейся впереди ходовой части или MTx2=-Mcxs-MTx1 для движущейся следом ходовой части).
При четвертом варианте (MAkt=0 и MTx2=±Mcxs-MTx1) и при пятом варианте (MAkt=-Mcxp1 и MTx2=±Mcxs-MTx1) из уравнений (3)-(6) соответственно формируется:


Таким образом, достигается, что суммы боковых сил рельсов ΣY1 и ΣY2 уравновешены (т.е. ΣY1=ΣY2)
Предпочтительно ходовая часть содержит раму, которая через первичную подвеску опирается на первую колесную единицу и вторую колесную единицу, причем структура транспортного средства через вторичную подвеску опирается на раму ходовой части. Для определения возвратного поворачивающего момента во вторичной подвеске определяется угол поворота между рамой ходовой части и структурой транспортного средства.
В случае третьей заданной идеальной величины опять же речь может идти о любой пригодной величине, с помощью которой может достигаться желаемая установка второй колесной единицы. Также и здесь предпочтительно третья заданная идеальная величина представляет заданный идеальный угол поворота (φz3si), который сопровождается кривизной рельсового пути.
Также и в этом случае с помощью третьего поправочного коэффициента (K3), как описано выше, может снова достигаться любая, при необходимости зависящая от времени корректировка примененной третьей заданной величины в отношении третьей заданной идеальной величины. Так, третий поправочный коэффициент (К3), по меньшей мере, эпизодически может выбираться не равным единице, и/или, выбираться по меньшей мере, эпизодически равным единице, и/или варьироваться по задаваемой кривой.
Первый диапазон частот может лежать в принципе на любом, подходящем для установки по радиусу дуги низком уровне. Предпочтительно включает первый диапазон частот от 0 до 1 Гц, в частности от 0 до 0,5 Гц.
Второй диапазон частот может лежать в принципе на любом уровне, подходящем для регулирования устойчивости колесных единиц на прямом рельсовом пути и на поворотах. Предпочтительно второй диапазон частот лежит, по меньшей мере, частично выше первого диапазона частот, чтобы иметь возможность простого разделения между обоими диапазонами частот. Предпочтительно второй диапазон частот включает от 4 до 8 Гц.
Для регулирования устойчивости колесных единиц на прямом рельсовом пути и на поворотах предпочтительно предусмотрено, что определяется мгновенная поперечная скорость первой колесной единицы, а также мгновенная скорость движения рельсового транспортного средства. По определенной мгновенной поперечной скорости первой колесной единицы и мгновенной скорости движения рельсового транспортного средства для второго диапазона частот в качестве заданной идеальной величины рассчитывается второй заданный идеальный угол поворота (φz2s). При этом второй заданный идеальный угол поворота выбирается таким образом, что в случае совпадения второго заданного угла поворота, представляющего вторую заданную величину, со вторым заданным идеальным углом поворота (т.е. K2=1) достигается поперечная скорость первой колесной единицы, которая противоположна и равна определенной поперечной скорости первой колесной единицы. Другими словами вместе с этим получающаяся поперечная скорость колесной единицы может регулироваться до нуля.
Предусмотрено, что мгновенная поперечная скорость первой колесной единицы регистрируется с помощью датчика скорости или мгновенное поперечное ускорение первой колесной единицы, зарегистрированное датчиком ускорения, интегрируется в мгновенную поперечную скорость колесной пары. Дополнительно или в качестве альтернативы применяется скорость движения, предоставленная в распоряжение стоящей выше системой управления движением. Дополнительно или в качестве альтернативы определяется мгновенная скорость движения колесного транспортного средства с помощью измерения числа оборотов, по меньшей мере, одного колеса рельсового транспортного средства.
Также и в этом случае с помощью второго поправочного коэффициента (K2), как описано выше для установки по радиусу дуги также и для регулирования устойчивости снова может достигаться любая, при необходимости зависящая от времени корректировка примененной второй заданной величины в отношении второй заданной идеальной величины. Так, второй поправочный коэффициент (K2) может, по меньшей мере, эпизодически выбираться не равным единице, и/или, по меньшей мере, эпизодически выбираться равным единице, и/или варьироваться по задаваемой кривой.
Далее настоящее изобретение относится к механизму для регулирования активной ходовой части рельсового транспортного средства, включающей, по меньшей мере, одну первую колесную единицу с двумя колесами, который содержит регулирующее устройство и, по меньшей мере, один исполнительный элемент, который управляется регулирующим устройством, который действует между первой колесной единицей и опирающейся на нее через первую первичную подвеску структурой транспортного устройства. При этом регулирующее устройство с помощью, по меньшей мере, одного первого исполнительного элемента осуществляет в пером диапазоне частот установку угла поворота первой колесной единицы вокруг вертикальной оси ходовой части относительно структуры транспортного средства в зависимости от фактической кривизны рельсового пути. Дополнительно или в качестве альтернативы регулирующее устройство противодействует с помощью, по меньшей мере, одного первого исполнительного элемента во втором диапазоне частот поперечным движениям, по меньшей мере, первой колесной единицы, вызванным нарушениями положения рельсов или синусоидальных ходом. В соответствии с изобретением, регулирующее устройство сформировано таким образом, что установка угла поворота первой колесной единицы осуществляется в первом диапазоне частот при применении первой заданной величины, которая соответствует первой заданной идеальной величине, умноженный на задаваемый первый поправочный коэффициент (K1), причем первая заданная идеальная величина выбирается таким образом, что в случае совпадения первой заданной величины с первой заданной идеальной величиной (т.е. K1=1) при фактической кривизне рельсового пути имеет место, по меньшей мере приближенная к радиусу дуги установка первой колесной единицы. Дополнительно или в качестве альтернативы в соответствии с изобретением, регулирующее устройство сформировано таким образом, что установка угла поворота первой колесной единицы осуществляется в первом диапазоне частот при применении второй заданной величины, которая соответствует второй заданной идеальной величине, умноженной на задаваемый второй корректирующий коэффициент (K2), причем вторая заданная идеальная величина выбирается таким образом, что в случае совпадения второй заданной величины со второй заданной идеальной величиной (т.е. K2=1) поперечные движения, вызванные нарушениями положения рельсового пути или синусоидальным ходом, в основном компенсируются, по меньшей мере, первой колесной единицей.
Предложенный в соответствии с изобретением механизм предназначен для осуществления способа, предложенному согласно изобретению. С помощью предложенного в соответствии с изобретением механизма могут быть реализованы в той же самой мере описанные выше варианты и преимущества предложенного согласно изобретению способа, так что здесь следует обраться к вышеупомянутому выполнению.
Настоящее изобретение далее относится к рельсовому транспортному средству с активной ходовой частью, включающей, по меньшей мере, одну первую колесную единицу с двумя колесами, и предложенным в соответствии с изобретением механизмом для регулирования активной ходовой части. Также с предложенным в соответствии с изобретением рельсовым транспортным устройством могут быть реализованы в той же самой мере описанные выше варианты и преимущества предложенного в соответствии с изобретением способа, так что здесь точно также следует обратиться к вышеупомянутому выполнению.
Другие предпочтительные варианты выполнения изобретения следуют из зависимых пунктов или нижеследующего описания предпочтительных примеров выполнения, которые поясняются чертежами. На чертежах представлено следующее:
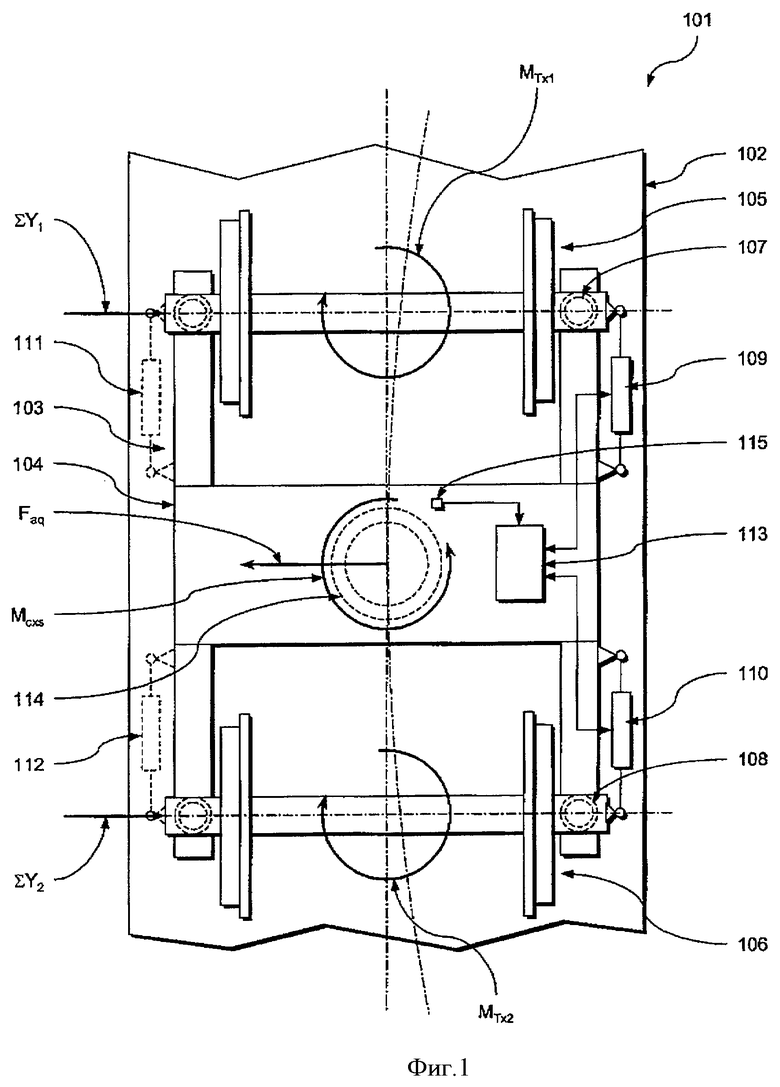
фиг.1 - схематичный вид снизу части предпочтительного варианта выполнения предложенного в соответствии с изобретением рельсового транспортного средства;
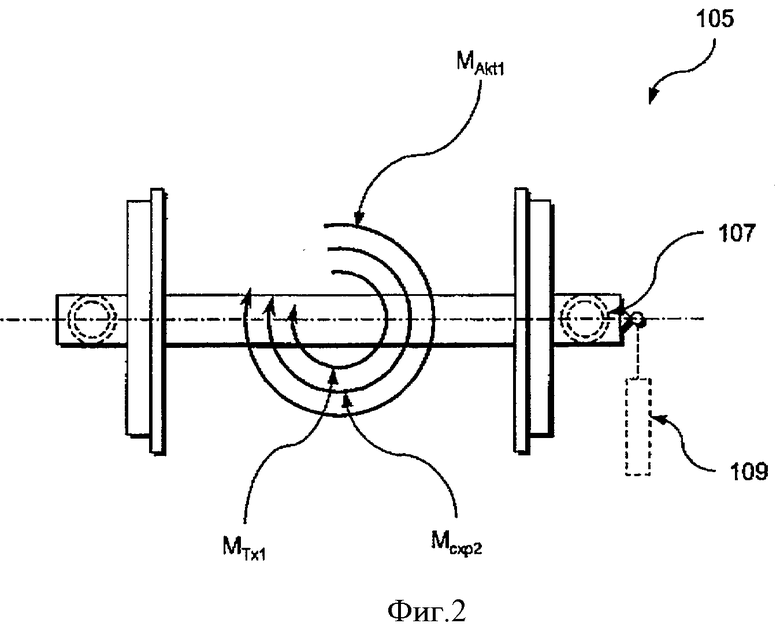
фиг.2 - схематичный вид детали рельсового транспортного средства по фиг.1 для пояснения регулирования при проходе дуги в первом диапазоне частот;
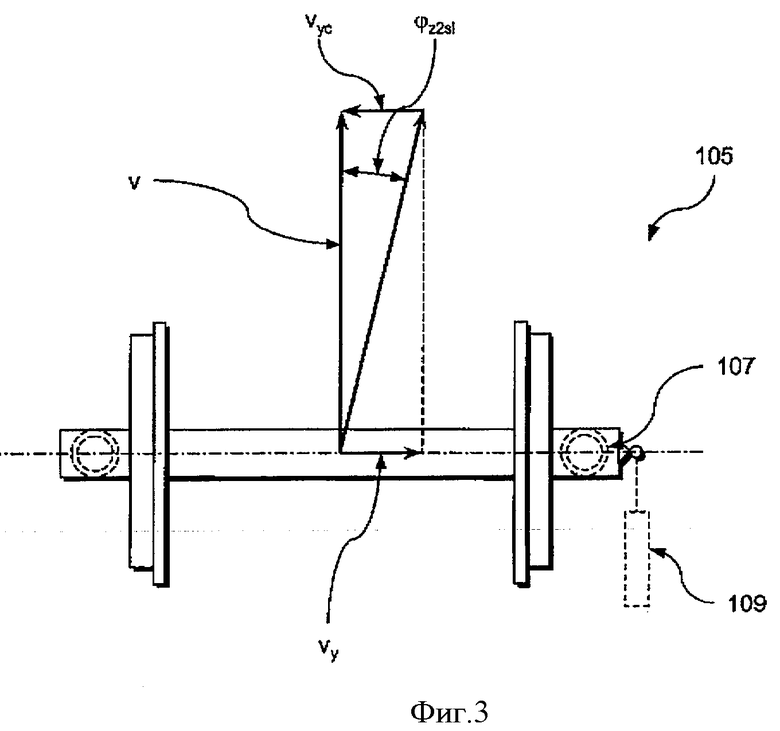
фиг.3 - схематичный вид детали рельсового транспортного средства для пояснения регулирования устойчивости во втором диапазоне частот.
Настоящее изобретение ниже описывается с помощью нескольких примеров выполнения предложенного в соответствии с изобретением способа, которые соответственно могут найти применение в рельсовом транспортном средстве, представленном на фиг.1-3.
На фиг.1 на виде снизу, т.е. от полотна железнодорожного пути, показана часть предложенного в соответствии с изобретением рельсового транспортного средства 101 с кузовом вагона 102, который опирается на активную ходовую часть в форме поворотной тележки 103. Поворотная тележка 103 содержит раму 104, первую колесную единицу в виде первой колесной пары 105 и вторую колесную единицу в виде второй колесной пары 106. Рама поворотной тележки 104 при этом через первую первичную подвеску 107 опирается на первую колесную пару 105 и через вторую первичную подвеску 108 на вторую колесную пару 106.
Для активного влияния на поведение при движении поворотной тележки 103 между первой колесной парой 105 и рамой 104 поворотной тележки действует первый исполнительный элемент 109, в то время как между второй колесной парой 106 и рамой поворотной тележки 104 действует второй исполнительный элемент 110. Для этого соответствующие исполнительные элементы 109, 110 с одной стороны соединены с помощью шарнира с рамой поворотной тележки 104 и с другой стороны с корпусом подшипника колеса соответствующей колесной пары 105, 106.
Оба исполнительных элемента 109, 110 создают активное поворотное движение соответствующей колесной пары 105, 106 вокруг перпендикулярно идущей к плоскости чертежа фиг.1 вертикальной оси рельсового транспортного средства 101. Оба исполнительных элемента активно влияют на угол поворота соответствующей колесной пары 105, 106 вокруг вертикальной оси рельсового транспортного средства 101, проходящей перпендикулярно плоскости чертежа на фигуре 1.
К тому же соответствующий исполнительный элемент 109, 110 создает на колесной паре 105, 106 поворачивающий момент вокруг вертикальной оси рельсового транспортного средства 101. При этом в показанном примере только одним исполнительным элементом 109, 110 на каждую колесную пару 105, 106 к соответствующей колесной паре 105, 106 от реакции опоры прилагается вторая компонента силовой пары, которая действует на соответствующую точку воздействия (удары и т.д.) соответствующего противолежащего корпуса подшипника колеса на раме поворотной тележки 104.
В других вариантах выполнения изобретения может быть предусмотрено также несколько исполнительных элементов на колесную ось, как это с помощью контуров 111, 112, изображенных штриховой линией, показано на фигуре 1. Исполнительные элементы 109, 110 на фиг.1 для простоты изображены в виде линейных исполнительных элементов. Однако могут быть предусмотрены также любые другие линейные или вращательные исполнительные элементы, а также любые другие шарнирные соединения соответственно передаточные механизмы между колесными парами и рамой поворотной тележки. Ряд возможных примеров для этого находится, например, в однажды цитируемом DE 10137443 А1. Далее исполнительные элементы могут основываться на любом принципе действия. Например, могут быть предусмотрены гидромеханические, электромеханические принципы действия или любая комбинация из них.
Регулирование поворотной тележки осуществляется с помощью регулирующего устройства 113, которое соединено с соответствующим исполнительным элементом 109, 110 и соответственным образом управляет им. При этом могут прослеживаться различные варианты предложенного согласно изобретению регулирования, которые ниже описываются в качестве примера.
Всем этим вариантам присуще то, что в первом диапазоне частот осуществляется установка угла поворота соответствующей колесной пары 105, 106 в зависимости от фактической кривизны рельсового пути и во втором диапазоне частот таким образом осуществляется наложенная установка угла поворота соответствующей колесной пары 105, 106, что оказывает противодействие поперечным движениям, вызванным нарушениями положения рельсов или синусоидальным ходом.
Таким образом, в первом диапазоне частот осуществляется регулирование хода по кривой, причем во втором диапазоне частот осуществляется наложенное регулирование устойчивости. Первый диапазон частот составляет при этом от 0 до 0,5 Гц, в то время как второй диапазон частот составляет от 4 до 8 Гц. Благодаря этому можно оптимизировать поведение при движении поворотной тележки и таким образом рельсового транспортного средства, как на дуге рельсового пути, так и при высоких скоростях на прямых участках.
Первый пример выполнения
При первом предпочтительном, предложенном согласно изобретению варианте регулирование хода на кривой, т.е. установка угла поворота первой колесной пары 105 в первом диапазоне частот осуществляется регулирующим устройством 113 при применении первого заданного угла поворота φz1s, который соответствует первому заданному идеальному углу φz1si, умноженному на задаваемый первый поправочный коэффициент K1, т.е. имеет место

Первый заданный идеальный угол поворота φz1si при этом выбирается таким образом, что при K1=1, т.е. в случае совпадения первого заданного угла поворота φz1s с первым заданным идеальным углом поворота φz1si при фактической кривизне рельсового пути имеет место установка по радиусу дуги первой колесной пары 105.
Далее регулирование осуществляется таким образом, что первый исполнительный элемент 109 в первом диапазоне частот в данный момент не должен создавать какого-либо поворачивающего момента, т.е. действительно: MAkt=0. Как следует из баланса моментов согласно уравнению (1) для поворачивающих моментов, представленных на фиг.2 на первой колесной паре 105 возвратный момент Mcxp1 первой первичной подвески 107 в основном уравновешен поворачивающим моментом MTx1 на первой колесной паре 105, образующимся из зацепления колесо-рельс, как это имеет место при пассивной благоприятной к прохождению дуги ходовой части, т.е. действительно:

В этом варианте при движении по дуге в первом диапазоне частот допускается, что первый исполнительный элемент 109 следует выворачивающему движению первой колесной пары, обусловленному кривизной рельсового пути, пока, как при пассивной благоприятной к прохождению дуги ходовой части, происходит, по меньшей мере, приближенная к радиусу дуги установка первой колесной пары 105.
Для первого исполнительного элемента 109 при выворачивании первой колесной пары 105 из фактического положения прерывисто или непрерывно задается новый первый заданный идеальный угол поворота φz1si, при котором ожидается подлежащее достижению отсутствие нагрузки с учетом фактической нагрузки на первый исполнительный элемент 109. Первый заданный идеальный угол поворота φz1si прерывисто или непрерывно сопровождается выворачивающим движением и таким образом фактической кривизной рельсового пути. В качестве входной величины для сопровождения первого заданного идеального угла поворота φz1si может применяться любой параметр, который будет представлять отсутствие нагрузки на исполнительный элемент. Эта величина предпочтительно выбирается в зависимости от принципа измерения, с помощью которого определяется нагрузка на исполнительный элемент.
Предпочтительно фактический угол поворота первой колесной пары 105 и величина, представляющая фактическую нагрузку на первый исполнительный элемент 109 (например, величина силы, величина момента, величина тока и т.д.) регистрируются с помощью подходящих датчиков. Если нагрузка на первый исполнительный элемент 109 отклоняется от нуля, в этом случае задается соответствующий новый первый заданный идеальный угол поворота φz1si. Это может происходить прерывисто или непрерывно, причем, например, может обеспечиваться с помощью временной интеграции величины, представляющей нагрузку на исполнительный элемент 109 так, что в первом диапазоне частот регистрируется только ситуация с нагрузкой на исполнительном элементе 109.
Благодаря этому может отпасть надобность в измерении или ином определении фактической кривизны рельсового пути, а при необходимости только с помощью имеющейся в первом диапазоне частот нагрузки на первом исполнительном элементе 109 устанавливается, что имеет место установка по радиусу дуги, или с помощью параметра фактического состояния движения поворотной тележки 103 (скорость движения, поперечное ускорение и т.д.) делается вывод об угле поворота требуемом для установки точно по радиусу дуги. Это имеет преимущество, заключающееся в том, что в сравнении с, как правило, более или менее затратным определением фактической кривизны рельсового пути может достигаться заметно меньшее запаздывание во времени в части сопровождения.
С помощью первого поправочного коэффициента K1 примененный при регулировании первый заданный угол поворота φz1s, может целенаправленно корректироваться в отношении первого заданного идеального угла поворота φz1si. Благодаря этому может также достигаться избыточное или недостаточное компенсирование, что, однако, связано с расходом энергии, и имеет следствием то, что MAkt≠0. При K1=0 может, например, даже реализоваться жесткое шарнирное соединение, как у обычных пассивных транспортных средств.
Вместе с этим можно целенаправленно корректировать регулирование в отношении идеального регулирования с первым заданным идеальным углом поворота φz1si, обремененного местным очень сильным износом колес, не отказываясь от преимуществ идеального регулирования. Было показано, что уже при небольшом, определенном отклонении от идеального регулирования при как прежде хорошем поведении при проходе дуги и хорошей устойчивости может быть достигнуто заметно лучшее распределение износа на поверхностях качения колес, вследствие чего получается более благоприятная картина износа и, стало быть, более длинный срок службы.
При этом может быть предусмотрено, что при необходимости идеальное регулирование осуществляется также на длинных участках, т.е. поправочный коэффициент K1 выбирается равным единице, и только время от времени определенным образом регулирование корректируется в отношении идеального регулирования, т.е. упомянутый коэффициент K1 выбирается не равным единице. Далее может быть предусмотрено, что корректировка регулирования в отношении идеального регулирования изменяется с помощью поправочного коэффициента K1 в соответствии с задаваемой временной кривой, например, непрерывно. Точно также поправочный коэффициент K1 естественно может варьироваться также в зависимости от фактической или ожидаемого состояния движения (скорость и т.д.) или фактического или ожидаемого состояния участка (профиль участка и т.д.). Благодаря этому может быть достигнуто любое распределение износа.
Описанное выше регулирование осуществляется в первом варианте регулирования и для второй колесной пары 106 поворотной тележки 103 так, что в конечном счете для всех колесных пар может копироваться поведение при проходе дуги, как при пассивной, благоприятной для прохождения дуги ходовой части. Как, в частности, видно из упомянутого выше уравнения (1), с помощью этого регулирования хотя и не достигается идеальное представление о проходе дуги с MTx=0 (т.е. без поворачивающего момента, формирующегося из зацепления колесо-рельс) и уравновешенными поперечными силами при проходе дуги, однако при достижимой высокой устойчивости движения с небольшим расходом энергии может быть получено хорошее прохождение дуги и хорошие результаты в плане износа.
Первая колесная пара 105 движущегося рельсового транспортного средства при наезде на боковое место нарушения рельсового пути испытывает определенное боковое отклонение своей середины от среднего положения рельсов, а также полученное в результате этого боковое ускорение, которое ведет к поперечной скорости первой колесной пары 105 относительно рельсов. При соответствующей комбинации рельсов и колес вследствие связывания числа оборотов обоих жестко сидящих на осевом валу колес при слабом демпфировании получалось бы синусоидальное поперечное и поворачивающее движение колесной пары 105- у движущихся в поворотной тележке 103 колесных пар 105, 106 и всей ходовой части - вокруг своего среднего положения. При скоростях выше предела устойчивости происходило бы все большее возбуждение этого поперечного и поворачивающего движения, что вело бы к потере устойчивости. Равным образом это относится к возрастающему синусоидальному ходу, формирующемуся вследствие случайного бокового начального отклонения, который преобразуется в нестабильный зигзагообразный ход. Подобного рода феномены ведут к повышенным поперечным силам между колесами и рельсами, которые могут вести к усиленному износу вплоть до смещения рельсошпальной решетки или опасности схода с рельсов.
Для избежания этого в первом варианте регулирования, регулирование устойчивости первой колесной пары 105 на прямом пути, а также на повороте и установка угла поворота первой колесной пары 105 осуществляется во втором диапазоне частот с помощью регулирующего устройства 113 при применении второго заданного угла поворота φz2s, который соответствует второму заданному идеальному углу поворота φz2si умноженному на задаваемый второй поправочный коэффициент К2, т.е. действительно:

При этом второй заданный идеальный угол поворота φz2si выбирается таким образом, что при K2=1, т.е. в случае совпадения второго заданного угла поворота φz2s со вторым заданным идеальным углом поворота φz2si поперечные движения первой колесной пары 105, вызванные нарушениями положения рельсового пути или синусоидальным ходом, в основном компенсируются.
Для этого определяется мгновенная поперечная скорость первой колесной пары 105, а также мгновенная скорость движения рельсового транспортного средства 101. По определенным мгновенной поперечной скорости первой колесной пары 105 и мгновенной скорости движения рельсового транспортного средства в качестве второй заданной идеальной величины рассчитывается второй заданный идеальный угол поворота φz2si. При этом второй заданный идеальный угол поворота φz2si выбирается таким образом, что в случае совпадения второго заданного угла поворота, представляющего вторую заданную величину, со вторым заданным идеальным углом поворота (т.е. K2=1) достигается поперечная скорость первой колесной пары 105 первой колесной единицы, которая равна и противоположна определенной поперечной скорости первой колесной пары первой колесной единицы. При этом поперечная скорость первой колесной пары 105 колесной единицы приводится к нулю.
При предложенном в соответствии с изобретением способе с помощью соответствующих датчиков регистрируется мгновенная поперечная скорость колесной пары vy, которые установлены в осевых подшипниках. При этом речь может идти, например, о датчиках, регистрирующих боковое ускорение, сигналы которых интегрируются во времени. Кроме того, в систему регулирования направляются данные о мгновенной скорости движения v рельсового транспортного средства, которые передаются от вышестоящей системы управления движением или от в целом известных приборов для измерения скорости.
Целью идеального регулирования (K2=1), как упоминалось, является противопоставление первой колесной паре 105 с его вызванной нарушением или синусоидальным ходом поперечной скоростью vy с помощью первого исполнительного элемента 109 противоположно равной поперечной скорости. Она достигается за счет того, что в качестве входной величины постоянно рассчитывается мгновенный второй заданный идеальный угол поворота φz2si, который при соответствующей установке первой колесной пары 105 относительно своего фактического шарнирного соединения, например рамы ходовой части, ведет к желаемой, одинаковой, но противоположно направленной поперечной скорости (см. фиг.3).
Эта рассчитанная величина заданного идеального угла поворота φz2si регулирующим устройством 113 направляется первому исполнительному элементу, обладающему достаточно высокой динамикой при достаточно малом сдвиге фаз. Благодаря его воздействию поперечное движение, возникающее вследствие нарушения положения рельсового пути или синусоидального хода, подавляется уже в самом начале, так что первая колесная пара 105, несмотря на свое мягкое в продольном направлении шарнирное соединение остается сбоку и в покое относительно своего поворотного движения.
Вторая колесная пара 106 поворотной тележки 103 регулируется таким же образом по этому способу регулирования устойчивости, чтобы удержать ее несмотря на мягкое в продольном направлении шарнирное соединение сбоку и в покое относительно своего поворотного движения.
Также и при регулировании устойчивости с помощью второго поправочного коэффициента (K2), как было описано выше для установки по радиусу дуги, снова может достигаться любая, при необходимости зависящая от времени корректировка примененной второй заданной величины в отношении второй заданной идеальной величины. Таким образом, следовательно, и при регулировании устойчивости возможно направленным образом корректировать регулирование в отношении идеального регулирования со вторым заданным идеальным углом поворота φz1si, обусловленным местным, очень сильным износом колес, не потеряв при этом преимуществ идеального регулирования. Оказалось, что уже при малом определенном отклонении от идеального регулирования при, как и ранее, хорошем поведении при проходе дуги и хорошей устойчивости на прямых участках, может быть достигнуто лучшее распределение износа на поверхностях качения колес, в результате чего получается заметно более благоприятная картина износа и вместе с ней более длинный срок службы.
При этом может быть предусмотрено, что при необходимости идеальное регулирование осуществляется и на длинных участках, т.е. второй поправочный коэффициент K2 выбирается равным 1, и только время от времени регулирование определенным образом корректируется относительно идеального регулирования, т.е. выбирается K2≠1. Далее может быть предусмотрено, что корректировка в отношении идеального регулирования изменяется, например, постоянно с помощью поправочного коэффициента K2, задаваемого по временной кривой. Точно так же, естественно, поправочный коэффициент K2 может варьироваться в зависимости от фактического или ожидаемого состояния движения (скорость и т.д.) или фактического или ожидаемого состояния пути (профиль пути и т.д.). Благодаря этому может быть получено любое распределение износа.
Так, при плохом качестве рельсового пути, т.е. при высоких амплитудах и большой плотностью нарушений в положении рельсового пути, или в зависимости от скорости движения может осуществляться приспосабливание параметров правил регулирования. Регулирующее устройство 113 может, например, при плохом качестве рельсового пути работать «острее», чтобы реагировать сильнее или, например, при невысокой скорости движения работать «мягче», чтобы препятствовать слишком сильным нагрузкам на соответствующий исполнительный элемент 109, 110.
Способ регулирования устойчивости имеет преимущество, заключающееся в простоте, так как не должна создаваться никакая предварительная история, а в любой момент времени рассматривается только мгновенное состояние движения первой колесной пары 105.
Кроме того, каждая колесная пара 105, 106 регулируется независимо от другой колесной пары той же самой ходовой части 103 или транспортного средства 101. Реакции на нарушения рельсового пути и возможную неустойчивость на колесной паре 105, 106 сразу же устраняются регулированием. Колесная пара 105, 106 остается устойчивой, т.е. в покое относительно своих движений в поперечном направлении и вокруг своей вертикальной оси, несмотря на мягкое ведение колесной пары в продольном направлении. В связи с этим не требуется каких-либо средств демпфирования против вращательных движений вокруг вертикальной оси между колесной парой 105, 106 и ходовой частью 103 или между ходовой частью 103 и кузовом вагона 102 или колесной парой 105, 106 и кузова вагона 102. Таким образом, несмотря на отсутствие гашения неустойчивости, которая вообще не может появиться, кузов вагона ведет себя заметно спокойнее, чем при традиционных решениях.
Оказалось, что улучшение по сравнению с пассивно регулируемым по радиусу проходом дуги (MAkt=0 и MTx=-Мсхр) достижимо, как это было описано выше с помощью первого варианта регулирования, только с расходом энергии соответствующим исполнительным элементом 109, 110 (MAkt>>0), чтобы приблизиться к идеальному представлению о проходе дуги (MTx=0 и ΣY1=ΣY2). С помощью описанных ниже вариантов предложенного в соответствии с изобретением способа возможно с помощью соответственно уменьшенного расхода энергии достижение хорошего приближения к идеальному проходу дуги.
Второй пример выполнения
Итак, во втором предпочтительном варианте регулирования предусмотрено, что установка угла поворота первой колесной пары 105, хотя и осуществляется также согласно первому упомянутому выше варианту регулирования (т.е. MAkt=0), установка же угла поворота второй колесной пары 106 происходит в первом диапазоне частот при применении третьего заданного угла поворота φz3s, который соответствует третьему заданному идеальному углу поворота φz3si, умноженному на задаваемый третий поправочный коэффициент K3. При этом третий заданный идеальный угол поворота φz3si выбирается таким образом, что при K3=1, т.е в случае совпадения третьего заданного угла поворота φz3s с третьим заданным идеальным углом поворота φz3si поворачивающий момент MTx1 на первой колесной паре, образующемуся при фактической кривизне рельсового пути из зацепления колесо-рельс, равен и противоположно направлен поворачивающему моменту MTx2 на второй колесной паре, образующемуся при фактической кривизне рельсового пути из зацепления колесо-рельс, (т.е. MTx1=-MTx2). Из приведенных выше уравнений (3)-(6) следуют изложенные выше отношения:


Таким образом суммы боковых сил на рельсах ΣY1 на первой колесной паре 105 и ΣY2 на второй колесной паре 106 компенсированы за исключением составляющей возвратного поворачивающего момента Mcxs вторичной подвески 114, через которую кузов вагона 102 опирается на раму поворотной тележки 104.
Регулирующее устройство 113 рассчитывает третий заданный идеальный угол поворота φz3si предпочтительно по поворачивающему моменту MTx1 на первой колесной раме, получающемуся при фактической кривизне рельсового пути из сцепления колесо рельс, задаваемую для поворотной тележки 103 зависимость поворачивающего момента Мсхр2 второй первичной подвески 108 от угла поворота φz3 второй колесной рамы 106 и задаваемую для поворотной тележки 103 зависимость поворачивающего момента MAkt2 второго исполнительного элемента 110 от угла поворота φz3 второй колесной пары 106. Такая зависимость поворачивающего момента MAkt второго исполнительного элемента 110 от угла поворота φz3 второй колесной пары 106 может быть задана любым способом, например, с помощью, прежде всего, определенного уравнения, характеристики или параметрической поверхности и т.д., которое было определено сначала для поворотной тележки 103 или транспортного средства.
Также и в данном случае с помощью третьего поправочного коэффициента K3, таким же способом, как уже было описано в связи с первым поправочным коэффициентом K1, может быть получена снова любая, при необходимости зависящая от времени, ситуации движения или ситуации на пути, корректировка примененного третьего заданного угла поворота φz3s в отношении третьего заданного идеального угла поворота φz3si. Так, третий поправочный коэффициент K3, подобно первому поправочному коэффициенту K1, может выбираться, по меньшей мере, эпизодически не равным единице, и/или выбираться, по меньшей мере, эпизодически равным единице, и/или варьироваться по задаваемой кривой.
Чтобы избежать нестабильной ситуации при движении, регулирование стабилизации колесных пар 105, 106 на прямом рельсовом пути, а также и на поворотах осуществляется как при первом варианте регулирования, т.е. установкой угла поворота первой и второй колесной пары 105, 106 во втором диапазоне частот. Регулирующее устройство 113 действует здесь, как описано выше в связи с первым вариантом регулирования, т.е. при применении второго заданного угла поворота φz2s, который соответствует второму заданному идеальному углу поворота φz2si, умноженному на задаваемый второй поправочный коэффициент K2. Поэтому здесь следует обратиться к вышеупомянутому осуществлению.
Третий пример выполнения
При предпочтительном третьем варианте выполнения осуществляется регулирование при проходе дуги, т.е. установка угла поворота первой колесной пары 105 в первом диапазоне частот с помощью регулирующего устройства 113 при применении первого заданного угла поворота φz1s, который опять же соответствует первому заданному идеальному углу поворота φz1si, умноженному на задаваемый первый поправочный коэффициент K1, T.e. также и здесь действительно:

При этом предусмотрено, что первый исполнительный элемент 109 в первом диапазоне частот таким образом сопровождается поворотным движением первой колесной единицы, обусловленным изменением кривизны рельсового пути, что первый исполнительный элемент при K1=1, т.е. при совпадении первого заданного угла поворота φz1s с первым заданным идеальным углом поворота φz1si, при фактической кривизне рельсового пути мгновенно в первом диапазоне частот создает поворачивающий момент MAkt1, который противоположен и равен поворачивающему моменту Mcxp1 первой первичной подвески 107 (т.е. MAkt1=-Mcxp1).
Вторая колесная пара 106 также регулируется этим способом. Установка угла поворота второй колесной пары 106 в первом диапазоне частот осуществляется при применении третьего заданного угла поворота φz3s, который соответствует третьему заданному идеальному углу поворота φz3si умноженному на задаваемый третий поправочный коэффициент K3. Третий заданный идеальный угол поворота φz3si опять же выбирается так, что при K3=1, т.е. в случае совпадения третьего заданного угла поворота φz3s с третьим заданным идеальным углом поворота φz3si по меньшей мере, второй исполнительный элемент 110 в первом диапазоне частот, таким образом сопровождается поворотным движением второй колесной единицы, обусловленным изменением кривизны рельсового пути, что второй исполнительный элемент 110 при фактической кривизне рельсового пути мгновенно в первом диапазоне частот создает поворачивающий момент MAkt2, который противоположен и равен поворачивающему моменту Мсхр2 первой первичной подвески 108 (т.е. MAkt2=-Mcxp2).
Здесь из уравнения (1), т.е. при установке первой колесной пары 105 и второй колесной пары 106 в соответствии с радиусом дуги следует обращение в нуль поворачивающего момента из зацепления колесо-рельс (т.е. MTx1=MTx2=0) и из уравнений (3)-(6) следует:


Как и при втором варианте регулирования, достигается, что суммы боковых сил, действующих на рельсах ΣY1 на первой колесной паре 105 и ΣY2 на второй колесной паре 106 уравновешены за исключением составляющей возвратного поворачивающего момента Mcxs вторичной подвески 114.
Сопровождение первого заданного идеального угла поворота φz1si или третьего заданного идеального угла поворота φz3si, соответствующее кривизне рельсового пути, может осуществляться любым пригодным способом. Предпочтительно, что регистрируются фактический угол поворота φz1 первой колесной пары 105 или фактический угол поворота φz3 второй колесной пары 106 и величина (например, величина силы, величина момента, величина давления, величина тока и т.д.), представляющая нагрузку на соответствующий исполнительный элемент 109, 110. Задается новый первый заданный идеальный угол поворота φz1si или новый третий заданный идеальный угол поворота φz3si, если нагрузка на данный исполнительный элемент 109, 110 отклоняется от той, которая получалась бы при этом угле поворота φz1 или φz3 из возвратного момента первичной подвески 107 или 108.
Также и в этом случае с помощью первого поправочного коэффициента K1 или третьего поправочного коэффициента K3, как уже описано выше, может быть снова достигнута любая, при необходимости зависящая от времени, ситуации движения и/или ситуации на участке движения корректировка примененной первой или третьей заданной величины в отношении первой или третьей заданной идеальной величины. Так, первый поправочный коэффициент K1 или третий поправочный коэффициент K3 может выбираться, по меньшей мере, эпизодически не равным единице, и/или выбираться, по меньшей мере, эпизодически равным единице, и/или варьироваться по задаваемой кривой.
Чтобы избежать нестабильной ситуации при движении, как при первом варианте регулирования регулирование устойчивости колесных пар 105, 106 на прямом рельсовом пути, а также на повороте рельсового пути, т.е. установка угла поворота первой и второй колесной пары 105, 106 осуществляется во втором диапазоне частот. Здесь регулирующее устройство 113 действует, как это описано в связи с первым вариантом регулирования, т.е. при применении второго заданного угла поворота φz2s, который соответствует второму заданному идеальному углу поворота φz2si умноженному на задаваемый поправочный коэффициент K2. Поэтому здесь следует обратиться к вышеупомянутому выполнению.
Четвертый пример выполнения
При предпочтительном четвертом варианте выполнения осуществляется регулирование прохода по дуге, т.е. установка угла поворота первой колесной пары в первом диапазоне частот, как при первом варианте регулирования (т.е. MAkt=0). Установка угла поворота второй колесной пары осуществляется в первом диапазоне частот, однако при применении третьего заданного угла поворота φz3s, который соответствует заданному идеальному третьему углу поворота, умноженному на задаваемый третий поправочный коэффициент К3. При этом третий заданный идеальный угол поворота φz3si выбирается таким образом, что при K3=1, т.е. в случае совпадения третьего заданного угла поворота φz3s с третьим заданным идеальным углом поворота φz3si поворачивающий момент MTx2 на второй колесной паре 106, получающийся при фактической кривизне рельсового пути из зацепления колесо-рельс, соответствует разности поворачивающих моментов, которая получается из произведения коэффициента направления движения L на фактически существующий возвратный поворачивающий момент Mcxs во вторичной подвеске 108 и на поворачивающий момент MTx1 на первой колесной паре 105, получающийся при фактической кривизне рельсового пути из зацеплении колесо-рельс. Коэффициент направления движения L при этом направления движения для движущейся впереди поворотной тележки 103 равен 1 и для движущейся следом поворотной тележки 103 равен -1 (т.е. MTx2=Mcxs-MTx1 для движущейся впереди поворотной тележки 103 или MTx2=-Mcxs-MTx1 для движущейся следом поворотной тележки 103).
При этом четвертом варианте регулирования (MAkt=0 и MTx2=±Mcxs-MTx1 из уравнений (3)-(6) образуются следующие отношения:


Вместе с этим достигается, что уравновешены суммы боков сил на рельсах ΣY1 на первой колесной паре 105 и ΣY2 на второй колесной паре 106 (т.е. ΣY1=ΣY2).
Для определения возвратного поворачивающего момента Mcxs на вторичной подвеске 108 определяется угол поворота между рамой поворотной тележки 104 и кузовом вагона 102 с помощью сенсора 115, соединенного с регулирующим устройством 113.
Также и здесь с помощью первого поправочного коэффициента K1 или третьего поправочного коэффициента K3, как описано выше, может быть достигнута любая, при необходимости зависящая от времени, ситуации при движении и/или ситуации с участком движения корректировка примененной первой или третьей заданной величины в отношении первой или третьей заданной идеальной величины. Так, первый поправочный коэффициент K1 или третий поправочный коэффициент K3 может выбираться, по меньшей мере, эпизодически не равным единице, и/или выбираться, по меньшей мере, эпизодически равным единице, и/или варьироваться по задаваемой кривой.
Чтобы избежать нестабильной ситуации, осуществляется как при первом варианте регулирования регулирование устойчивости колесных пар 105, 106 на прямом колесном пути, а также на поворотах колесного пути, т.е. установка угла поворота первой и второй колесной пары 105, 106 во втором диапазоне частот. Здесь регулирующее устройство 113 действует, как описано выше в связи с первым вариантом регулирования, т.е. при применении второго заданного угла поворота φz2s, который соответствует заданному идеальному углу поворота φz2si, умноженному на задаваемый второй поправочный коэффициент K2. Так что здесь только следует обратиться к вышеупомянутому выполнению.
Пятый пример выполнения
При предпочтительном пятом варианте регулирования осуществляется регулирование при проходе поворотов, т.е. установка угла поворота первой колесной пары 105 в первом диапазоне частот, как при третьем варианте регулирования (т.е. MAkt1=-Mcxp1). Установка угла поворота второй колесной пары 106 осуществляется в первом диапазоне частот, однако, как при четвертом варианте регулирования (т.е. MTx2=Mcxs-MTx1 для движущейся впереди поворотной тележки 103 или MTx2=-Mcxs-MTx1 для движущейся следом поворотной тележки 103). Поэтому в этом отношении делается ссылка на приведенные выше выполнения.
При этом пятом варианте регулирования и при пятом варианте (MAkt1=-Mcxp1 и MTx2=+Mcxs-MTx1) из уравнений (3)-(6) следует отношение:
В этом случае достигается, что суммы боковых сил на рельсах ΣY1 на первой колесной паре 105 и ΣY2 на второй колесной паре уравновешены (т.е. ΣY1=ΣY2).
Также и здесь с помощью первого поправочного коэффициента K1 или третьего поправочного коэффициента K3 может быть достигнута при необходимости зависящая от времени, ситуации при движении и/или ситуации на участках движения корректировка примененной первой или третьей заданной величины в отношении первой или третьей заданной идеальной величины. Так, первый поправочный коэффициент K1 или третий поправочный коэффициент K3 может выбираться, по меньшей мере, эпизодически не равным единице, и/или выбираться, по меньшей мере, эпизодически равным единице, и/или варьироваться по задаваемой кривой.
Чтобы избежать нестабильной ситуации, регулирование устойчивости первой колесной пары 105, 106 на прямом рельсовом пути и также на повороте рельсового пути осуществляется как при первом варианте регулирования, т.е. установкой угла поворота первой и второй колесной пары 105, 106 во втором диапазоне частот. Регулирующее устройство 113 действует здесь, как описано выше в связи с первым вариантом регулирования, т.е. при применении второго заданного угла поворота φz2s, который соответствует второму заданному идеальному углу поворота φz2si, умноженному на задаваемый второй поправочный коэффициент K2. Так что здесь следует обратиться к вышеупомянутому выполнению.
Понятно, что при всех описанных выше вариантах регулирования движущие и тормозные моменты оказывают воздействие на регулирование при проходе поворотов особенно при осесимметричном решении, показанном на фиг.1. Они создают силу на соответствующем штоке исполнительного элемента, которые своим следствием имеют выворачивание соответствующей колесной пары - эквивалентно движению по дуге. Движущие и тормозные моменты, однако, могут накладываться на систему автоматического регулирования с помощью соответствующего измерения (например, измерения силы тяги на стороне где нет исполнительного элемента) или с помощью передачи из системы управления движением и таким образом компенсироваться.
Настоящее изобретение выше было описано исключительно с помощью примеров с заданными идеальными углами поворотов в качестве заданных идеальных величин. Однако, подразумевается, что при других вариантах изобретения в качестве заданной идеальной величины может применяться любая другая подходящая величина, с помощью которой может достигаться желаемая установка соответствующей колесной пары.
Настоящее изобретение выше было описано исключительно с помощью примеров с поворотными тележками с двумя колесными парами. Однако, понятно, что при других вариантах изобретения могут применяться также любые другие варианты ходовой части.
Настоящее изобретение относится к способу регулирования активной ходовой части рельсового транспортного средства, к устройству для регулирования активной ходовой части рельсового транспортного средства, а также к рельсовому транспортному средству. Установку угла поворота первой колесной единицы в первом диапазоне частот осуществляют при применении первой заданной величины, которая соответствует первой заданной идеальной величине, умноженной на задаваемый первый поправочный коэффициент (K1). Первую заданную идеальную величину выбирают таким образом, что в случае совпадения первой заданной величины с первой заданной идеальной величиной (т.е. K1=1) при фактической кривизне рельсового пути существует приближенная радиусу дуги установка первой колесной единицы и/или установку угла поворота первой колесной единицы во втором диапазоне частот осуществляют при применении второй заданной величины. Вторая заданная величина соответствует второй заданной идеальной величине, умноженной на задаваемый второй поправочный коэффициент (K2). Вторую идеальную заданную величину выбирают таким образом, что в случае совпадения второй заданной величины со второй заданной идеальной величиной (т.е. K2=1) поперечные движения, вызванные нарушениями положения рельсового пути или синусоидальным ходом, в основном компенсируются первой колесной единицей. Достигается увеличение длительности срока службы колес. 3 н. и 25 з.п. ф-лы, 3 ил.
1. Способ регулирования активной ходовой части (103) рельсового транспортного средства, содержащей, по меньшей мере, одну первую колесную единицу с двумя колесами, в котором посредством, по меньшей мере, одного первого исполнительного элемента (109), функционирующего между первой колесной единицей (105) и структурой транспортного средства (102), опирающейся на нее через первую первичную подвеску (107),
- в зависимости от фактической кривизны рельсового пути в первом диапазоне частот осуществляют установку угла поворота первой колесной единицы (105) вокруг вертикальной оси ходовой части относительно структуры транспортного средства (102) и/или
- во втором диапазоне частот установку угла поворота первой колесной единицы (105) вокруг вертикальной оси ходовой части относительно структуры транспортного средства (102) осуществляют таким образом, что поперечным движением, вызванным нарушениями положения рельсового пути или синусоидальным ходом, оказывается противодействие, по меньшей мере, первой колесной единицы (105), отличающийся тем, что установку угла поворота первой колесной единицы (105) в первом диапазоне частот осуществляют при применении первой заданной величины, которая соответствует первой заданной идеальной величине, умноженной на задаваемый первый поправочный коэффициент (K1), причем первую заданную идеальную величину выбирают таким образом, что в случае совпадения первой заданной величины с первой заданной идеальной величиной (т.е. K1=1) при фактической кривизне рельсового пути существует, по меньшей мере, приближенная радиусу дуги установка первой колесной единицы (105) и/или установку угла поворота первой колесной единицы (105) во втором диапазоне частот осуществляют при применении второй заданной величины, которая соответствует второй заданной идеальной величине, умноженной на задаваемый второй поправочный коэффициент (K2), причем
- вторую идеальную заданную величину выбирают таким образом, что в случае совпадения второй заданной величины со второй заданной идеальной величиной (т.е. K2=1) поперечные движения, вызванные нарушениями положения рельсового пути или синусоидальным ходом, в основном компенсируются, по меньшей мере, первой колесной единицей (105).
2. Способ по п.1, отличающийся тем, что в случае совпадения первой заданной величины с первой заданной идеальной величиной при фактической кривизне рельсового пути выполняют точную по радиусу дуги установку первой колесной единицы (105), а возвратный поворачивающий момент первой первичной подвески (107) находится, в основном, в равновесии с поворачивающим моментом, образованном в зацеплении колесо-рельс, причем, по меньшей мере, один первый исполнительный элемент (109) в данный момент не создает, в основном, какого-либо поворачивающего момента.
3. Способ по п.1, отличающийся тем, что, по меньшей мере, один первый исполнительный элемент (109) в первом диапазоне частот, таким образом, сопровождается поворотным движением первой колесной единицы (105), обусловленным изменением кривизны рельсового пути, что, по меньшей мере, один первый исполнительный элемент (109) в случае совпадения первой заданной величины с первой заданной идеальной величиной при фактической кривизне рельсового пути в данный момент в первом диапазоне частот, в основном, не создает какого-либо поворачивающего момента.
4. Способ по п.1, отличающийся тем, что первая заданная идеальная величина является заданным идеальным углом поворота (φz1i), который сопровождается кривизной рельсового пути.
5. Способ по п.1, отличающийся тем, что первый поправочный коэффициент (K1) выбирают, по меньшей мере, периодически не равным единице и/или выбирают, по меньшей мере, периодически равным единице, и/или варьируют по задаваемой кривой.
6. Способ по п.1, отличающийся тем, что ходовая часть (103) содержит движущуюся следом за первой колесной единицей (105) вторую колесную единицу (106), на которую через вторую первичную подвеску (108) опирается структура транспортного средства (102), при этом угол поворота второй колесной единицы (106) устанавливают с помощью, по меньшей мере, одного функционирующего между второй колесной единицей (106) и структурой транспортного средства (102) второго исполнительного элемента (110), и установку угла поворота второй колесной единицы (106) осуществляют в первом диапазоне частот при применении второй заданной величины, которая соответствует третьей заданной идеальной величине, умноженной на задаваемый третий поправочный коэффициент (K3), причем третью заданную идеальную величину выбирают таким образом, что в случае совпадения третьей заданной величины с третьей заданной идеальной величиной (т.е. K3=1) поворачивающий момент на первой колесной единице (105), образующийся при фактической кривизне рельсового пути из зацепления колесо-рельс противоположно равен поворачивающему моменту на второй колесной единице (106), образующемуся при фактической кривизне рельсового пути из зацепления колесо-рельс.
7. Способ по п.6, отличающийся тем, что третья заданная идеальная величина является третьим заданным идеальным углом поворота (φz3si), который рассчитывается по:
- поворачивающему моменту (MTx1) на первой колесной единице (105), образующемуся при фактической кривизне рельсового пути из зацепления колесо-рельс,
- заданной для ходовой части (103) зависимости поворачивающего момента (МСх2) второй первичной подвески (108) от угла поворота (φzз) второй колесной единицы (106) и
- заданной для ходовой части (103) зависимости поворачивающего момента второго исполнительного элемента (110) от угла поворота второй колесной единицы (106).
8. Способ по п.6, отличающийся тем, что третий поправочный коэффициент (K3) выбирают, по меньшей мере, периодически не равным единице и/или выбирают, по меньшей мере, периодически равным единице, и/или варьируют по задаваемой кривой.
9. Способ по п.1, отличающийся тем, что, по меньшей мере, один первый исполнительный элемент (109) в первом диапазоне частот сопровождается поворотным движением колесной единицы (105), обусловленным изменением кривизны рельсового пути, таким образом, что, по меньшей мере, один первый исполнительный элемент при совпадении первой заданной величины с первой заданной идеальной величиной для фактической кривизны рельсового пути в данный момент в первом диапазоне частот привлекает поворачивающий момент, который противоположно равен поворачивающему моменту первой первичной подвески (107).
10. Способ по п.9, отличающийся тем, что первая заданная идеальная величина является первым заданным идеальным углом поворота (φz1i), который сопровождается кривизной рельсового пути.
11. Способ по п.9, отличающийся тем, что первый поправочный коэффициент (K1) выбирают, по меньшей мере, периодически не равным единице и/или выбирают, по меньшей мере, периодически равным единице, и/или варьируют по задаваемой кривой.
12. Способ по п.9, отличающийся тем, что ходовая часть (103) содержит движущуюся следом за первой колесной единицей (105) вторую колесную единицу (106) с двумя колесами, на которой через вторую первичную подвеску (108) опирается структура транспортного средства (102), при этом угол поворота второй колесной единицы (106) устанавливают с помощью, по меньшей мере, одного второго исполнительного элемента, действующего между второй колесной единицей (106) и структурой транспортного средства (102), и установку угла поворота второй колесной единицы (106) в первом диапазоне частот осуществляют при применении третьей заданной величины, которая соответствует третьей заданной идеальной величине, умноженной на задаваемый третий поправочный коэффициент (K3), причем третью заданную идеальную величину выбирают таким образом, что в случае совпадения третьей заданной величины с третьей заданной идеальной величиной (т.е. K3=1), по меньшей мере, один второй исполнительный элемент (110) в первом диапазоне частот сопровождается поворотным движением второй колесной единицы, обусловленным изменением кривизны рельсового пути, таким образом, что, по меньшей мере, один второй исполнительный элемент (110) при фактической кривизне рельсового пути в данный момент в первом диапазоне частот привлекает поворачивающий момент, который противоположно равен поворачивающему моменту второй первичной подвески (108).
13. Способ по п.12, отличающийся тем, что третья заданная идеальная величина является третьим заданным идеальным углом поворота (φz1i), который сопровождается кривизной рельсового пути.
14. Способ по п.12, отличающийся тем, что первый поправочный коэффициент (K1) выбирают, по меньшей мере, периодически не равным единице, и/или выбирают, по меньшей мере, периодически равным единице, и/или варьируют по задаваемой кривой.
15. Способ по п.1, отличающийся тем, что ходовая часть (103) содержит движущуюся следом за первой колесной единицей (105) вторую колесную единицу (106) с двумя колесами, на которую через вторую первичную подвеску (108) опирается структура транспортного средства (102), причем угол поворота второй колесной единицы (106) устанавливают, по меньшей мере, посредством одного второго исполнительного элемента (110), действующего между второй колесной единицей (106) и структурой транспортного средства (102), при этом структура транспортного средства (102) через первичную подвеску (107, 108) и вторичную подвеску (114) опирается на первую колесную единицу (105) и вторую колесную единицу (106), и установку угла поворота второй колесной единицы (106) в первом диапазоне частот осуществляют при применении третьей заданной величины, которая соответствует третьей заданной идеальной величине, умноженной на задаваемый третий поправочный коэффициент (K3), причем третью заданную идеальную величину выбирают таким образом, что в случае совпадения третьей заданной величины с третьей заданной идеальной величиной (т.е. K3=1) поворачивающий момент на второй колесной единице (106), образующейся при фактической кривизне рельсового пути из зацепления колесо-рельс, соответствует разности поворачивающих моментов, которая формируется из произведения коэффициента направления движения (L) на фактически имеющийся возвратный поворачивающий момент на вторичной подвеске (114) и величину поворачивающего момента на первой колесной единице (105), образующегося при фактической кривизне рельсового пути из зацепления колесо-рельс, причем коэффициент направления движения (L) для движущейся впереди ходовой части (103) равен 1 и движущейся следом ходовой части (103) равен 1.
16. Способ по п.15, отличающийся тем, что ходовая часть (103) содержит раму ходовой части (104), которая через соответственно первичную подвеску (107, 108) опирается на первую колесную единицу (105) и вторую колесную единицу (106), причем структура транспортного средства (102) через вторичную подвеску (114) опирается на раму ходовой части (104) и для определения возвратного поворачивающего момента на вторичной подвеске (114) определяют угол поворота между рамой ходовой части (104) и структурой транспортного средства (102).
17. Способ по п.15, отличающийся тем, что третья заданная идеальная величина является третьим заданным идеальным углом поворота (φz3i), который сопровождается кривизной рельсового пути.
18. Способ по п.15, отличающийся тем, что третий поправочный коэффициент (K3) выбирают, по меньшей мере, периодически не равным единице, и/или выбирают, по меньшей мере, периодически равным единице, и/или варьируют по задаваемой кривой.
19. Способ по п.1, отличающийся тем, что первый диапазон частот составляет от 0 до 1 Гц, в частности от 0 до 0,5 Гц.
20. Способ по п.1, отличающийся тем, что второй диапазон частот, по меньшей мере, периодически находится выше первого диапазона частот.
21. Способ по п.20, отличающийся тем, что второй диапазон частот составляет от 4 до 8 Гц.
22. Способ по п.1, отличающийся тем, что определяют мгновенную поперечную скорость первой колесной единицы (105), а также мгновенная скорость движения рельсового транспортного средства (101) и по определенной мгновенной поперечной скорости первой колесной единицы (105) и мгновенной скорости движения рельсового транспортного средства (101) для второго диапазона частот в качестве второй заданной идеальной величины рассчитывается второй заданный идеальный угол поворота (φz2s), причем второй заданный идеальный угол поворота (φz2si) выбирают таким образом, что в случае совпадения второго заданного угла поворота, представляющего вторую заданную величину, со вторым заданным идеальным углом поворота (K3=1) для определенной поперечной скорости первой колесной единицы (105) достигается противоположно равная поперечная скорость первой колесной единицы (105).
23. Способ по п.22, отличающийся тем, что мгновенную поперечную скорость первой колесной единицы (105) регистрируют датчиком скорости или интегрируют поперечное ускорение первой колесной единицы, зарегистрированное датчиком ускорения, и/или в качестве мгновенной скорости движения рельсового транспортного средства (101) используют скорость движения, предоставленную в распоряжении выше стоящей системой управления движения, и/или мгновенную скорость движения рельсового транспортного средства (101) определяют с помощью измерения числа оборотов, по меньшей мере, одного колеса рельсового транспортного средства (101).
24. Способ по п.1, отличающийся тем, что второй поправочный коэффициент (K2) выбирают, по меньшей мере, периодически не равным единице, и/или выбирают, по меньшей мере, периодически равным единице, и/или варьируют по задаваемой кривой.
25. Устройство для регулирования активной ходовой части (105) рельсового транспортного средства (101), содержащей, по меньшей мере, одну первую колесную единицу (105) с двумя колесами, содержащее
- регулирующее устройство (113) и, по меньшей мере, один исполнительный элемент (109), управляемый регулирующим устройством (113), выполненный с возможностью функционирования между первой колесной единицей (105) и структурой транспортного средства (102), опирающийся на нее через первичную подвеску (107), причем
- регулирующее устройство (113) с помощью, по меньшей мере, первого исполнительного элемента в первом диапазоне частот устанавливает угол поворота первой колесной единицы (105) вокруг вертикальной оси транспортного средства относительно структуры транспортного средства (102) в зависимости от фактической кривизны рельсового пути и/или
- регулирующее устройство (113) с помощью, по меньшей мере, одного первого исполнительного элемента во втором диапазоне частот противодействует поперечным движениям, по меньшей мере, первой колесной единицы, вызванным нарушениями в положении рельсового пути или синусоидальным ходом, отличающееся тем, что
- регулирующее устройство (113) предназначено для установки угла поворота первой колесной единицы (105) в первом диапазоне частот при применении первой заданной величины, которая соответствует первой заданной идеальной величине, умноженной на задаваемый первый поправочный коэффициент (K1), причем
- первая заданная идеальная величина выбирается таким образом, что в случае совпадения первой заданной величины с первой заданной идеальной величиной (т.е. K1=1) при фактической кривизне рельсового пути существует, по меньшей мере, приближенная радиусу дуги установка первой колесной единицы (105) и/или
- регулирующее устройство (113) предназначено для установки угла поворота первой колесной единицы (105) во втором диапазоне частот при применении второй заданной величины, которая соответствует второй заданной идеальной величине, умноженной на задаваемый второй поправочный коэффициент (K2), причем
- вторая идеальная заданная величина выбрана таким образом, что в случае совпадения второй заданной величины со второй заданной идеальной величиной (т.е. K2=1) поперечные движения, вызванные нарушениями положения рельсового пути или синусоидальным ходом, компенсируются в основном, по меньшей мере, первой колесной единицей (105).
26. Устройство по п.25, отличающееся тем, что первая заданная идеальная величина является идеальным заданным углом поворота (φz1si) и регулирующее устройство (113) сопровождается заданным идеальным углом поворота (φz1si) кривизны рельсового пути и/или вторая заданная идеальная величина является вторым идеальным углом поворота (φz2si).
27. Устройство по п.26, отличающееся тем, что второй диапазон частот лежит, по меньшей мере, частично выше первого диапазона частот.
28. Колесное транспортное средство с активной ходовой частью (103), содержащей, по меньшей мере, одну колесную единицу с двумя колесами и устройство для регулирования активной ходовой части по любому из пп.25-27.
| СПОСОБ И УСТРОЙСТВО ДЛЯ АКТИВНОГО УПРАВЛЕНИЯ РАДИАЛЬНОЙ УСТАНОВКОЙ КОЛЕСНЫХ ПАР ИЛИ КОЛЕСНЫХ СКАТОВ ТРАНСПОРТНЫХ СРЕДСТВ | 2002 |
|
RU2283254C2 |
| DE 4040303 A1, 25.06.1992 | |||
| DE 4412951 C1, 24.05.1995 | |||
| DE 4412952 C1, 24.05.1995 | |||
| DE 19826452 A1, 23.12.1999 | |||
| РЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО С ОДНООСНОЙ ТЕЛЕЖКОЙ | 1997 |
|
RU2143356C1 |

