Изобретение относится к рельсовым транспортным средствам, а именно к устройствам, осуществляющим самоустановку колесных пар челюстных тележек при движении по участкам пути с изменяемой кривизной.
Известен способ снижения износа системы колесо-рельс [1], заключающийся в том, что углы набегания гребней колес на боковую грань головки наружного рельса уменьшают путем разворачивания оси колесной пары в направлении радиуса криволинейного участка пути, для чего с определенной периодичностью и длительностью производят подтормаживание колеса колесной пары, которое движется по внутреннему рельсу.
Недостатком указанного способа является то, что из-за жесткой посадки двух колес колесной пары на единую ось невозможно выполнять колодочное подтормаживание одного колеса, не подтормаживая при этом другое колесо, что не позволяет управлять положением тележки в пути по предложенному способу.
Известна ходовая часть подвижного состава с рамой, опирающейся на две ходовые тележки [2]. Под средней частью рамы установлена дополнительная управляющая рулевая колесная пара с возможностью поперечного перемещения относительно главной рамы. При этом управляющая рулевая колесная пара имеет кинематическую связь с поворотной конструкцией ходовых тележек, причем передаточное отношение от рулевой колесной пары к каждой ходовой тележке зависит от направления движения состава, чем обеспечивается оптимальный угол поворота ходовых тележек на криволинейных участках рельсовой колеи.
Недостатком конструкции является её громоздкость и дополнительный вес, связанный с размещением управляющей рулевой колесной пары. Другим её недостатком является неточность управления, обусловленная тем, что предлагаемая конструкция реагирует лишь на изменение стрелы прогиба пути между двумя её ходовыми тележками, поэтому при входе и выходе из криволинейного участка пути поворот тележек происходит с задержкой. Предлагаемая конструкция не управляет радиальной установкой колесных пар в каждой из тележек.
Известны рельсовые транспортные средства с активным управлением радиальной установкой колесных пар.
В рельсовом транспортном средстве с изменяемой геометрией положения осей колесных пар в горизонтальной плоскости тележки [3], рациональное поперечное смещение осей и установка межосевых углов достигаются за счет того, что на одном конце каждой оси предусмотрен неподвижный вертикальный центр вращения, а на другом конце каждой оси предусмотрен исполнительный орган, осуществляющий угловое смещение опоры оси колесной пары в горизонтальной плоскости. В способе и устройстве для активного управления радиальной установкой колесных пар [4] и их удержания в таком положении радиальная установка колесных пар при движении по криволинейным участкам пути осуществляется за счет подачи управляющих сигналов на сложную систему исполнительных механизмов в виде системы рычагов и сервоприводов. В способах [3, 4] не указаны исходные данные и алгоритм управления положением колесных пар в железнодорожном пути. Общим недостаткам устройств [3, 4] с активным управлением радиальной установкой колесных пар является вероятность сбоя работы исполнительных механизмов, что может привести к изменению углового положения осей колесных пар в горизонтальной плоскости, несоответствующему радиусу кривизны пути, и, как следствие, к аварийной ситуации.
Известно соединение буксы с боковой рамой тележки грузового вагона [5], в котором снижение износа системы колесо-рельс осуществлено за счет установки упругого амортизатора между адаптером и опорными поверхностями буксового выреза боковой рамы челюстной тележки. Ослабление связи колесных пар с челюстной тележкой в горизонтальной плоскости способствует динамической самоустановке осей колесных пар в радиальном направлении.
Известен способ снижения износа системы колесо-рельс и конструкция для его осуществления [6], в котором снижение износа, в частности, осуществляется за счет обеспечения высокой поперечной жесткости и прямоугольности формы тележки, что при движении состава в кривых участках пути уменьшает углы набегания гребней колес на боковую грань головки рельса. При этом высокая поперечная жесткость и прямоугольность формы тележки достигается за счет установки жесткой поперечной связи в виде рамки между её боковинами.
Технические решения, предложенные в изобретениях [5, 6], приняты в качестве прототипов заявляемого устройства для управления угловым положением колесных пар челюстной тележки в железнодорожном пути.
Общим недостатком конструкций для управления положением колесных пар в железнодорожном пути, описанных в патентах [1–6], является недостаточная эффективность управления угловым положением тележки и её колесных пар в кривых участках пути.
Техническим результатом заявляемого изобретения является повышение эффективности управления угловым положением челюстной тележки и ее колесных пар при движении транспортного средства в железнодорожном пути изменяемой кривизны посредством устройства, учитывающего направление движения транспортного средства.
Технический результат достигается тем, что устройство для управления угловым положением колесных пар челюстной тележки в железнодорожном пути в зависимости от направления движения, включающее упругие амортизаторы, установленные между рамой челюстной тележки и буксовыми узлами колесных пар, для обеспечения возможности поворота колесных пар в горизонтальной плоскости относительно рамы тележки с высокой жесткостью в направлении её поперечного сдвига, оснащено следящей системой, включающей определитель передней и задней по ходу движения колесных пар и исполнительными устройствами для снижения жесткости крепления в горизонтальной плоскости челюстной тележки колесной пары, которая определена в качестве задней, причем определитель передней и задней по ходу движения колесных пар состоит из размещенного на раме челюстной тележки электрогенератора постоянного тока, кинематически связанного с одной из колесных пар и регистратора полярности тока, вырабатываемого электрогенератором, а исполнительные устройства для снижения жесткости крепления в горизонтальной плоскости задней колесной пары установлены в увеличенных по ширине буксовых проемах рамы челюстной тележки, причем каждое исполнительное устройство состоит из силового механизма, прикрепленного к одной из боковых стенок буксового проема и выполненного с возможностью перемещения в направлении к буксовому узлу и от него закрепленной на силовом механизме вертикальной подвижной пластины, на которой со стороны буксового узла установлен вертикальный упругий амортизатор, напротив которого на другой боковой стенке буксового проема установлен такой же вертикальный упругий амортизатор.
Также технический результат достигается тем, что в устройстве для управления угловым положением колесных пар челюстной тележки в железнодорожном пути в зависимости от направления движения следящая система дополнительно оснащена измерительными устройствами для отслеживания изменения расстояний δ1 и δ2 между рамой тележки и буксовыми узлами колесной пары, которая определена в качестве передней, и электронным узлом для расчета по изменению расстояний δ1 и δ2 скорости ω изменения угла поворота передней колесной пары относительно рамы тележки и подачи управляющей команды на исполнительное устройство регулирования жесткости крепления задней колесной пары в горизонтальной плоскости тележки.
Изобретение поясняется чертежами:
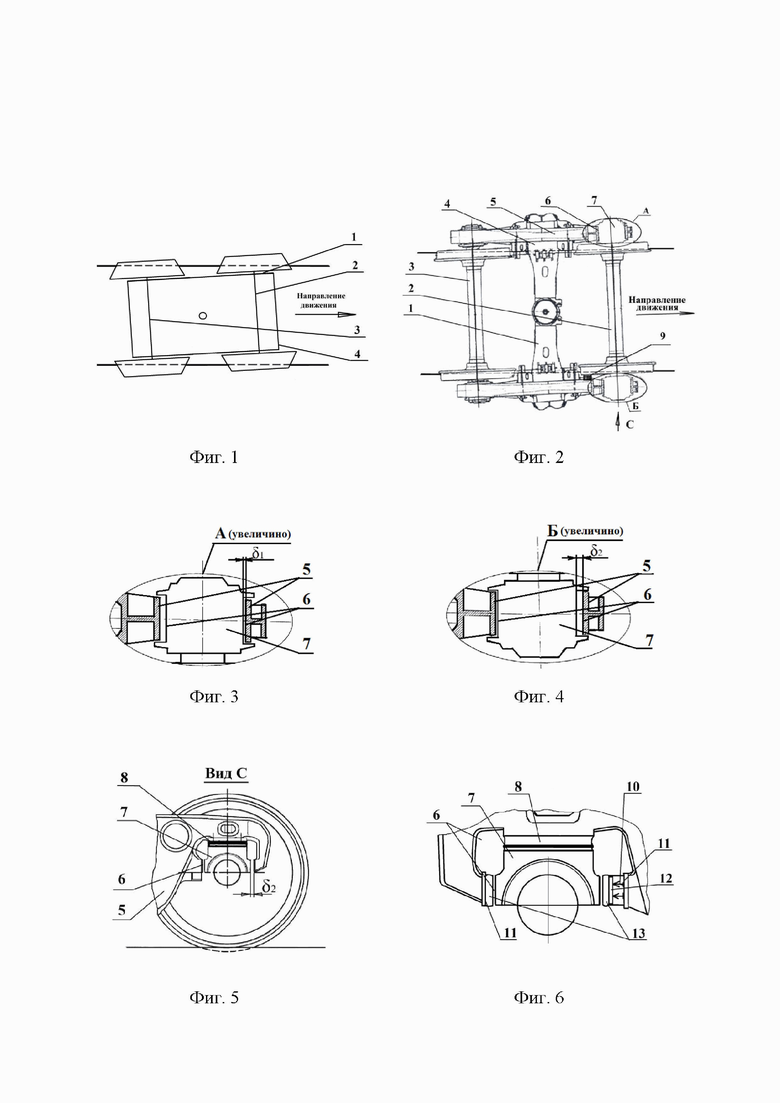
- на фиг. 1 изображена схема установки в железнодорожном пути двухосной тележки с высокой жесткостью в направлении поперечного сдвига;
- на фиг. 2 изображена двухосная челюстная тележка с высокой жесткостью в направлении поперечного сдвига, оборудованная следящей системой и исполнительным устройством;
- на фиг. 3 изображен выносной элемент А фиг. 2;
- на фиг. 4 изображен выносной элемент Б фиг. 2;
- на фиг. 5 изображен вид С фиг. 2;
- на фиг. 6 изображено исполнительное устройство управления жесткостью крепления буксовых узлов колесных пар.
Двухосная челюстная тележка 1 (далее по тексту тележка 1) (фиг.1, 2) включает в себя переднюю 2 и заднюю 3 по ходу движения колесные пары, раму 4 тележки 1 с высокой жесткостью поперечного сдвига между двумя боковыми балками 5, в которых выполнены увеличенные по ширине буксовые проемы 6. Между горизонтальными стенками буксовых проемов 6 рамы 4 и буксовыми узлами 7 колесных пар 2 и 3 установлены упругие амортизаторы 8 (фиг. 5), обеспечивающие возможность продольного сдвига буксовых узлов 7 относительно вертикальных стенок буксовых проемов 6. Тележка 1 также оснащена следящей системой, включающей определитель 9 передней и задней по ходу движения колесных пар (фиг. 2), который состоит из размещенного на раме челюстной тележки электрогенератора постоянного тока, кинематически связанного с одной из колесных пар и регистратора полярности тока, вырабатываемого электрогенератором (на фиг. не показаны). Следящая система может быть дополнительно оснащена измерительными устройствами (на фиг. не показаны) для отслеживания изменения расстояний δ1 и δ2 между рамой тележки и буксовыми узлами колесной пары, которая определена в качестве передней (фиг. 3 – 5), и электронным узлом (на фиг. не показан), для расчета по изменению расстояний δ1 и δ2 скорости ω изменения угла поворота передней колесной пары относительно рамы тележки и подачи управляющей команды на исполнительное устройство регулирования жесткости крепления задней колесной пары в горизонтальной плоскости тележки. В увеличенных по ширине буксовых проемах 6 в боковых балках 5 рамы 4 тележки 1 размещают исполнительные устройства регулирования жесткости крепления колесных пар относительно горизонтальной плоскости тележки (фиг. 6).
Каждое исполнительное устройство снижения жесткости крепления буксовых узлов 7 задней 3 колесной пары относительно горизонтальной плоскости челюстной тележки 1 устанавливают между увеличенными по ширине буксовыми проемами 6 боковых балок 5 рамы 4 челюстной тележки 1 и буксовыми узлами 7 (фиг. 6). Указанное исполнительное устройство состоит из силового механизма 10, закрепленного на одной из боковых стенок 11 увеличенного по ширине буксового проема 6. Силовой механизм 10 выполнен с возможностью перемещения в направлении буксового узла и от него прикрепленной к силовому механизму 10 подвижной пластины 12. На подвижной пластине 12 со стороны буксового узла 7 закреплен упругий амортизатор 13, а на противоположной боковой стенке увеличенного по ширине буксового проема 6 установлен такой же упругий амортизатор 13.
В зависимости от направления движения транспортного средства в тележке 1 любая из колесных пар может становиться либо передней 2 либо задней 3, поэтому в каждом буксовом проеме установлено измерительное устройство для отслеживания изменения расстояний δ1 и δ2 (на фиг. не показаны) и исполнительное устройство (фиг. 6) снижения жесткости крепления буксовых узлов 7.
Работа предлагаемого и устройства управления положением тележки и её колесных пар в железнодорожном пути основана на следующих теоретических предпосылках.
Пусть в начальный момент одиночная колесная пара, свободная от связей с рамой 4 тележки 1, или колесная пара, которая установлена в тележку 1, но имеет невысокую в горизонтальной плоскости жесткостную связь с рамой 4 тележки 1, движется в прямолинейном или криволинейном участке пути так, что каждое из её колес катится по своему рельсу без проскальзывания. В этом случае в прямом участке рельсового пути центр оси колесной пары должен находиться на центральной осевой линии железнодорожного пути, а в кривых участках пути центр оси колесной пары смещается относительно центральной осевой линии к внешнему рельсу на расстояние, при котором разность кругов катания двух колес колесной пары соответствует разности длин рельсов, по которым движутся эти колеса. В обоих случаях ось колесной пары при этом должна быть направлена перпендикулярно центральной осевой линии пути. Такое положение соответствует движению колесной пары в пути по оптимальной траектории без проскальзывания колес относительно рельсов.
Пусть в следующий момент указанная колесная пара сместится в поперечном направлении. Это приведет к тому, что за счет конической формы поверхности катания колес одно из них начнет двигаться по рельсу кругом катания чуть большей длины, а другое – кругом катания чуть меньшей длины. За счет этого ось колесной пары развернется в плане относительно линии, перпендикулярной направлению пути, и направится в сторону такого её положения, при котором разность кругов катания на её колесах вновь будет соответствовать разности длин рельсов, по которым эти колеса катятся по оптимальной траектории. По инерции развернувшаяся колесная пара перейдет положение, соответствующее её движению в пути заданной кривизны по оптимальной траектории. Вслед за этим колесная пара заедет кругом катания бóльшего диаметра на противоположный рельс, вновь произойдет её поворот в плане, но уже в противоположную сторону, и процесс самоустановки колесной пары в путь продолжится. В результате диссипации энергии при таких перестроениях рассмотренный процесс самоустановки колесной пары носит характер затухающих колебаний, и через некоторое время колесная пара вновь возвратится к своему устойчивому движению по оптимальной траектории. При обеспечении одноточечного контакта каждого из колёс с рельсом указанное перестроение положения колесной пары происходит в условиях минимального проскальзывания колёс относительно рельсов, причем проскальзывание колес будет связано лишь с их небольшим разворотом относительно рельсов вокруг вертикальной оси, проходящей через пятно контакта колеса и рельса.
При увеличении жесткостной связи колесных пар с рамой 4 тележки 1 добиться динамической самоустановки колесных пар в оптимальное положение в железнодорожном пути при условии сведения к минимуму проскальзывания колес относительно рельсов, сложнее. Пояснение этой особенности поведения передней 2 и задней 3 колесных пар представлено на фиг. 1. Пусть тележка 1 с жесткой связью в горизонтальной плоскости между её рамой 4 и колесными парами 2 и 3 по причине входа в кривую или выхода из кривой, прохождения рельсового стыка, крестовины и т.д. оказалась развернутой относительно железнодорожного пути так, как это показано на фиг. 1, 2. В этом случае левое колесо передней 2 по ходу движения колесной пары и правое колесо задней 3 колёсной пары будут катиться по рельсу кругом катания бóльшего диаметра, чем этого требует оптимальное положение колесных пар. За счет разности кругов катания ось передней 2 колесной пары будет стремиться вернуться в перпендикулярное по отношению к пути положение подобно тому, как это происходит при описанном выше движении свободной колесной пары или колесной пары, на которую её связи с рамой 4 тележки 1 оказывают минимальное воздействие. При этом передняя колесная пара 2 будет передавать на связанную с ней раму 4 тележки 1 вращающий момент, который стремится вернуть тележку 1 в положение, при котором продольная ось этой тележки будет направлена по касательной к центральной осевой линии пути.
Обратный эффект возникает в задней 3 по ходу движения колесной паре. За счет того, что круг катания бóльшего диаметра находится на её правом по ходу движения колесе, силы трения между колёсами и рельсами, возникающие в пятне их контакта, стремятся еще больше развернуть заднюю 3 колесную пару и связанную с ней раму 3 тележки 1 в направлении уже образовавшегося поворота, показанного на фиг.1. Колеса задней колесной пары 3, не имея возможности развернуть тележку 1, удерживаемую в пути передней колесной парой, в сторону ещё большего угла поворота относительно направления движения пути в этом случае вынуждены проскальзывать относительно рельсов. По этой причине в тележке 1 с высокой жесткостью горизонтальных связей между её рамой 4 и колесными парами 2 и 3 задняя колесная пара 3 оказывает отрицательное влияние на процесс управления тележкой 1, и затрудняет её автоматическое вписывание в путь. Препятствуя развороту тележки 1 в нужном направлении, силы трения, возникающие в задней колесной паре 3, ведут к появлению сил трения и в передней колесной паре 2. Силы трения, которые возникают между рельсами и колесами передней 2 и задней 3 колесных пар в связи с их вынужденным проскальзыванием, создают дополнительное сопротивление движению транспортного средства, приводят к увеличению расхода топлива, износу колёс и рельсов, нарушают управление оптимальным положением углов поворота рамы 4 тележки 1 и колесных пар 2, 3 в железнодорожном пути.
Таким образом, передняя колесная пара 2 оказывает положительное влияние на процесс управления тележкой 1 и способствует её автоматическому вписыванию в путь. Поэтому целесообразно создать такие условия, при которых передняя колесная пара 2 будет максимально управлять положением тележки 1 в пути, обеспечивая такой угол её поворота, при котором продольная ось рамы 4 тележки 1 будет установлена по касательной к центральной линии пути. С целью такого управления угловым положением тележки в пути жесткость связи в горизонтальной плоскости между передней колесной парой 2 и рамой 4 тележки 1 должна быть выше, чем у задней колесной пары 3. Поэтому жесткость связи между задней колесной парой 3 и рамой 4 тележки 1 необходимо ослабить. В этом случае положением рамы 4 тележки 1 в пути будет управлять передняя колесная пара 2, а задняя колесная пара 3 будет самостоятельно вписываться в железнодорожный путь по рассмотренному выше принципу динамической самоустановки свободной колесной пары. При таком управлении поворот в горизонтальной плоскости рамы 4 тележки 1, ведомой передней колесной парой 2, происходит вокруг вертикальной оси, проходящей через середину оси задней колесной пары 3.
Тенденцией развития железнодорожного транспорта является увеличение грузоподъемности и скорости движения. Увеличение грузоподъемности приводит к увеличению массы колесных пар 2, 3 и массы рамы 4 тележки 1. Увеличение скорости движения приводит к увеличению угловых ускорений поворотных движений в горизонтальной плоскости колесных пар 2, 3 и рамы 4 тележки 1. При этом происходит увеличение сил, с которыми колесные пары 2, 3 и рама 4 тележки 1 действуют друг на друга во время перестроения их взаимного положения в пути. В связи с этим, чтобы в условиях возросших масс и скорости движения обеспечить своевременную установку колесных пар 2, 3 в положение их движения по оптимальной траектории, в настоящее время часто приходится увеличивать жесткость крепления колесных пар в горизонтальной плоскости рамы 4 тележки 1. Однако, как сказано выше, высокая жесткость крепления колесных пар 2, 3 в раме 4 тележки 1 не позволяет им устойчиво вписаться в путь, как вписывается в путь свободная колесная пара. В результате происходит увеличение сил трения между колесами и рельсами. В этих условиях особенно важно заставить переднюю 2 колесную пару эффективно управлять положением тележки 1 в железнодорожном пути, а заднюю 3 колесную пару – не препятствовать такому управлению.
Работа предлагаемого устройства управления положением колесных пар 2, 3 тележки 1 в железнодорожном пути рассмотрена на примере тележки модели 18-100 (ЦНИИ-ХЗ), выполненной с высокой поперечной жесткостью и прямоугольностью формы её рамы 4. При этом между рамой 4 и буксовыми узлами 7 рассматриваемой тележки 1 установлены упругие амортизаторы 8, обеспечивающие возможность поворота осей колесных пар 2, 3 в горизонтальной плоскости относительно рамы 4 тележки 1.
В предлагаемом устройстве для управления угловым положением колесных пар 2, 3 тележки 1 в зависимости от направления её движения следящая система, посредством которой осуществляется рациональная установка колесных пар 2, 3 тележки 1 в железнодорожном пути, включает в себя определитель 9, который состоит из размещенного на раме челюстной тележки электрогенератора постоянного тока, кинематически связанного с одной из колесных пар, и регистратора полярности тока, вырабатываемого электрогенератором. При движении тележки 1 электрогенератор постоянного тока вырабатывает электрический ток, полярность которого зависит от направления движения тележки. Регистратор (на фиг. 2 не показан) определяет полярность тока, вырабатываемого электрогенератором, исходя из этой полярности, определяет положение передней и задней колесной пары в тележке и подает управляющий сигнал на исполнительные устройства для снижения жесткости крепления задней колесной пары в горизонтальной плоскости тележки. Вырабатываемый генератором ток используется для питания следящей системы, устройств, подготавливающих и подающих управляющие команды и исполнительных устройств (фиг. 6).
До поступления управляющей команды на снижение жесткости крепления буксовых узлов 7 задней 3 колесной пары каждый силовой механизм 10, установленный на одной из боковых стенок 11 увеличенных по ширине буксовых проемов 6, оказывает давление на прикрепленную к нему вертикальную подвижную пластину 12, перемещает пластину 12 в направлении к буксовому узлу и зажимает буксовый узел 7 между двумя вертикальными упругими амортизаторами 13, один из которых закреплен на вертикальной подвижной пластине 12, а другой – на противоположной боковой стенке 11 буксового проема 6. По сигналу, поступающему на исполнительные устройства (фиг. 6) задней 3 колесной пары, силовой механизм 10 каждого из них перемещает подвижную вертикальную пластину 12 в направлении от буксового узла 7. При этом уменьшается давление на вертикальные упругие амортизаторы 13, размещенные по разные стороны буксового узла 7. В результате нелинейной характеристики упругости вертикальных упругих амортизаторов 13 происходит снижение жесткости крепления буксовых узлов 7 и, как следствие, снижение жесткости крепления задней колесной пары 3 в горизонтальной плоскости рамы 4 тележки 1. Дальнейшее перемещение вертикальной подвижной пластины 12 в направлении от буксового узла 7 приводит к появлению и увеличению зазора между буксовым узлом 7 и вертикальным упругим амортизатором 13, прикрепленным к вертикальной подвижной пластине 12. Это приводит к дополнительному снижению жесткости крепления буксового узла в горизонтальной плоскости относительно рамы 4 тележки 1. При этом жесткость крепления буксовых узлов 7 во многом определяется жесткостью на сдвиг упругого амортизатора 8. Одностороннее расположение силовых механизмов 10 в буксовых проемах 6 приводит к появлению несимметричных зазоров между каждым из буксовых узлов 7 и вертикальными упругими амортизаторами 13. Однако, в связи с тем, что поворот в горизонтальной плоскости геометрической оси колесной пары может происходить за счет продольного смещения как одного, так и другого её буксового узла, одностороннее расположение силовых механизмов 10 не повлияет на процесс управления положением тележки и её колесных пар в железнодорожном пути. За счет снижения жесткости крепления буксовых узлов 7 задней 3 колесной пары она получает дополнительную возможность самоустанавливаться в железнодорожном пути, не мешая при этом передней 2 колесной паре активно управлять угловым положением тележки с возникновением при этом минимальных сил трения скольжения между колесами обеих колесных пар 2, 3 и рельсами.
При движении транспортного средства в железнодорожном пути неизменной кривизны снижение жесткости крепления задней 3 колесной пары может приводить к периодической потере ею устойчивого положения.
Так происходит, например, при ударном воздействии одного из колес задней 3 колесной пары по рельсовому стыку. При этом ось задней колесной пары 3 будет отклоняться от перпендикулярного по отношению к пути направления, а затем вновь восстанавливать это положение в соответствии с рассмотренным выше принципом самоустановки свободной колесной пары. Во избежание возникающих при этом лишних поворотных перестроений задней 3 колесной пары жесткость её крепления можно дополнительно регулировать с учетом изменения кривизны преодолеваемых участков пути.
Для изменения жесткости крепления задней колесной пары с учетом изменения кривизны пути следящую систему дополнительно оснащают измерительным устройством для отслеживания изменения расстояний δ1 и δ2 между рамой 4 и буксовыми узлами 7 колесной пары, которая определена в качестве передней, и электронным узлом для определения скорости ω изменения угла поворота передней колесной пары относительно рамы тележки. Отслеживать изменение расстояний δ1 и δ2 во время движения железнодорожного транспортного средства можно различными используемыми в настоящее время устройствами и приборами, например, посредством лазерной установки, применяемой в современных рулетках, или при помощи тензорезисторов, фиксирующих деформации в криволинейных упругих скобах с плоским поперечным сечением (на фиг. не показаны), которые закрепляют в продольном направлении между буксовыми узлами 7 и боковыми балками 5 рамы 4 тележки 1. Электронный узел (на фиг. не показан) анализирует полученную информацию. Если в течение заданного промежутка времени Δt поступает сигнал об одновременном устойчивом уменьшении расстояния δ1 и увеличении расстояния δ2 (фиг. 2 – 5), то это означает, что в результате изменения кривизны проходимого участка пути и тенденции передней 2 колесной пары к самоустановке в железнодорожном пути происходит её поворот относительно рамы 4 тележки 1.
Если ω = Δ(δ1−δ2) Δt,
где ω - скорость изменения угла поворота передней колесной пары относительно рамы тележки;
δ1 и δ2 – расстояния между рамой и буксовыми узлами колесной пары;
Δt – заданный промежуток времени,
характеризующая скорость изменения угла поворота передней колесной пары 2 относительно рамы 4 тележки 1 за промежуток времени Δt, превысит заданное значение, то электронный узел (на фиг. не показан) формирует и подаёт управляющую команду на исполнительные устройства (фиг. 6) снижения жесткости крепления колесной пары, которая ранее была определена в качестве задней 3. При постепенном изменении кривизны пути скорость ω изменения угла поворота передней колесной пары относительно рамы тележки мала, и электронный узел (на фиг. не показан) не будет подавать управляющей команды на исполнительные устройства (фиг. 6) снижения жесткости крепления задней 3 колесной пары. В этом случае колесные пары 2, 3 тележки 1 успеют занять оптимальное положение без сильного увеличения трения между рельсами и колесами в пределах уже существующей жесткости крепления задней 3 колесной пары.
Если следящая система оснащена измерительным устройством и электронным узлом для определения скорости ω поворота передней колесной пары относительно рамы 4, то в зависимости от настройки следящей системы жесткость крепления задней 3 колесной пары можно менять в один этап или ступенчато в два этапа. Одноэтапное изменение жесткости крепления задней 3 колесной пары осуществляется при одновременном выполнении двух условий: что данная колесная пара является задней и скорость ω поворота передней колесной пары превысила заданное значение. Двухэтапное изменение жесткости крепления задней 3 колесной пары заключается в том, что на первом этапе, как только установлено, что данная колесная пара является задней, осуществляется снижение жесткости её крепления на величину Δ1. На втором этапе, если установлено, что скорость ω поворота передней колесной пары превысила заданное значение, осуществляется дополнительное снижение жесткости задней 3 колесной пары на величину Δ2.
Жесткость упругого амортизатора 8 (фиг. 5) на сдвиг и жесткость вертикальных упругих амортизаторов 13 на сдавливание, а также сила сжатия, создаваемая силовым механизмом 10, и все составляющие условия снижения жесткости крепления задней 3 колесной пары и величин такого снижения должны быть выбраны экспериментально с учетом обеспечения наиболее рационального управления угловым положением колесных пар 2 и 3 в железнодорожном пути.
Таким образом, предложено устройство, позволяющее за счет учета направления движения железнодорожного транспортного средства занять колесным парам 2, 3 оптимальное положение в железнодорожной колее и осуществлять движение колесных пар 2, 3 по оптимальной траектории, снизив при этом силы трения между рельсами и колесами железнодорожного транспортного средства, что позволит увеличить износостойкость колес и рельсов, сократить затраты на их восстановление, снизить энергопотребление железнодорожного транспорта. Представленное устройство предполагает регулирование снижения жесткости крепления задней колесной пары с использованием управляемых механических устройств, однако не предполагает непосредственного управления углами поворота колесных пар 2, 3 в железнодорожном пути, поэтому оно не может быть отнесено к устройствам активного управления угловым положением осей колесных пар. Выход из строя предлагаемого устройства всего лишь вернет управление тележкой к известным техническим решениям и не приведет к катастрофическим последствиям на железной дороге.
Список используемых источников:
1. Патент RU 2 515 946 «Способ снижения износа системы колесо – рельс».
2. Патент RU 2 710 051 «Ходовая часть подвижного состава с рулевой колесной парой».
3. Патент RU 2 603 176 «Рельсовое транспортное средство с изменяемой геометрией осей».
4. Патент RU 2 283 254 «Способ и устройство для активного управления радиальной установкой колесных пар или колесных скатов транспортных средств».
5. Патент RU 2 342 271 «Соединение буксы с боковой рамой тележки грузового вагона».
6. Патент RU 2 449 910 «Способ снижения износа системы колесо – рельс и конструкция для его осуществления».
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для радиальной установки колесных пар железнодорожной тележки с поводковой связью её рамы с буксами с учетом направления движения (варианты) | 2023 |
|
RU2806919C1 |
| Способ радиальной самоустановки колесных пар двухосной немоторной тележки в железнодорожном пути | 2024 |
|
RU2818601C1 |
| БУКСОВЫЙ УЗЕЛ ЛОКОМОТИВНОЙ ТЕЛЕЖКИ С РЕГУЛИРУЕМОЙ УСТАНОВКОЙ КОЛЕСНЫХ ПАР | 2007 |
|
RU2350499C1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ КОЛЕСНЫХ ПАР ЛОКОМОТИВНОЙ ТЕЛЕЖКИ В КРИВЫХ | 2005 |
|
RU2286900C1 |
| ДВУХОСНАЯ ЛОКОМОТИВНАЯ ТЕЛЕЖКА С РАДИАЛЬНОЙ УСТАНОВКОЙ КОЛЕСНЫХ ПАР | 2005 |
|
RU2291079C1 |
| ТЕЛЕЖКА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2770250C1 |
| ТЕЛЕЖКА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2763087C1 |
| Устройство и способ управления положением колесных пар тележки грузового вагона в железнодорожном пути | 2022 |
|
RU2794617C1 |
| Трехосная тележка | 2017 |
|
RU2677961C2 |
| ТЕЛЕЖКА ГРУЗОВОГО ВАГОНА | 2005 |
|
RU2292282C1 |
Изобретение относится к области железнодорожного транспорта, в частности, к устройствам управления угловым положением колесных пар челюстной тележки в железнодорожном пути в зависимости от направления движения. Между рамой челюстной тележки и буксовыми узлами колесных пар установлены упругие амортизаторы. Амортизаторы обеспечивают возможность поворота колесных пар относительно рамы тележки в горизонтальной плоскости и имеют высокую поперечную жесткость. Тележка оснащена системой для определения передней и задней по ходу движения колесной пары и исполнительным устройством для снижения жесткости амортизатора. Определитель состоит из генератора постоянного тока и регистратора полярности тока. Исполнительные устройства размещены в увеличенных по ширине буксовых проемах. Каждое устройство состоит из силового механизма. Механизмы прикреплены к одной из боковых стенок буксового проема и выполнены с возможностью перемещения в направлении к буксовому узлу и от него вертикальной подвижной пластины. На пластине установлен вертикальный упругий амортизатор. На другой стенке буксового узла установлен такой же амортизатор. Повышается эффективность управления угловым положением колесных пар челюстной тележки. 1 з.п. ф-лы, 6 ил.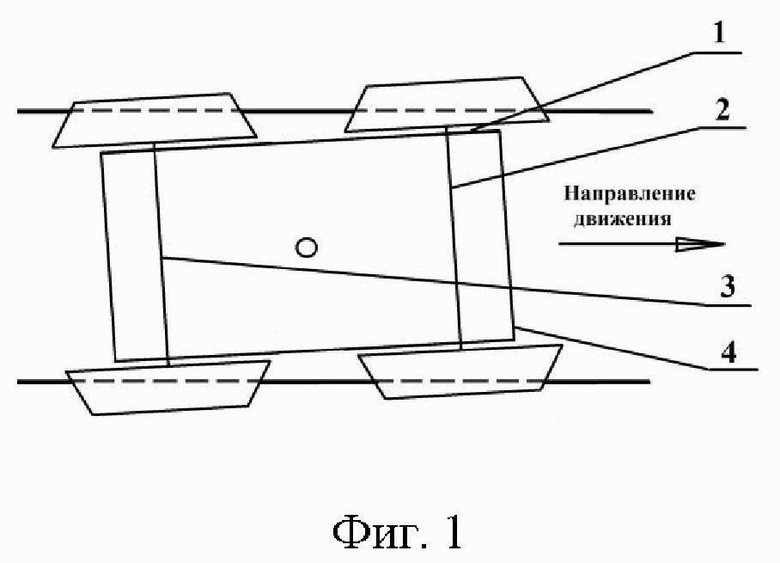
1. Устройство для управления угловым положением колесных пар челюстной тележки в железнодорожном пути в зависимости от направления движения, включающее упругие амортизаторы, установленные между рамой челюстной тележки и буксовыми узлами колесных пар, для обеспечения возможности поворота колесных пар в горизонтальной плоскости относительно рамы тележки с высокой жесткостью в направлении её поперечного сдвига, отличающееся тем, что оно оснащено следящей системой, включающей определитель передней и задней по ходу движения колесных пар, и исполнительными устройствами для снижения жесткости крепления в горизонтальной плоскости челюстной тележки колесной пары, которая определена в качестве задней, причем определитель передней и задней по ходу движения колесных пар состоит из размещенного на раме челюстной тележки электрогенератора постоянного тока, кинематически связанного с одной из колесных пар и регистратора полярности тока, вырабатываемого электрогенератором, а исполнительные устройства для снижения жесткости крепления в горизонтальной плоскости задней колесной пары установлены в увеличенных по ширине буксовых проемах рамы челюстной тележки, причем каждое исполнительное устройство состоит из силового механизма, прикрепленного к одной из боковых стенок буксового проема и выполненного с возможностью перемещения в направлении к буксовому узлу и от него закрепленной на силовом механизме вертикальной подвижной пластины, на которой со стороны буксового узла установлен вертикальный упругий амортизатор, напротив которого на другой боковой стенке буксового проема установлен такой же вертикальный упругий амортизатор.
2. Устройство для управления угловым положением колесных пар челюстной тележки по п. 1, отличающееся тем, что следящая система дополнительно оснащена измерительными устройствами для отслеживания изменения расстояний δ1 и δ2 между рамой тележки и буксовыми узлами колесной пары, которая определена в качестве передней, и электронным узлом для расчета по изменению расстояний δ1 и δ2 скорости ω изменения угла поворота передней колесной пары относительно рамы тележки и подачи управляющей команды на исполнительные устройства регулирования жесткости крепления задней колесной пары в горизонтальной плоскости тележки.
| СПОСОБ СНИЖЕНИЯ ИЗНОСА СИСТЕМЫ КОЛЕСО-РЕЛЬС И КОНСТРУКЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2449910C2 |
| Ходовая часть подвижного состава с рулевой колёсной парой | 2019 |
|
RU2710051C1 |
| СПОСОБ СНИЖЕНИЯ ИЗНОСА СИСТЕМЫ КОЛЕСО-РЕЛЬС | 2012 |
|
RU2515946C1 |
| GB 1246688 A, 15.09.1971. | |||

