Настоящее изобретение относится к области авиации и может найти применение в качестве индивидуального летательного аппарата для полета на небольших (до 500 м) высотах.
Известен аэросайкль Делекнера, содержащий каркас с посадочным шасси, кабину в форме решетчатой корзины, соединенной с каркасом, расположенной над двумя соосными винтами самолетного типа, двигатель, установленный в решетчатой корзине, соединен с воздушными винтами, горизонтальный стабилизатор на вынесенной штанге, механизмы управления. Двигатель - двухтактный подвесной мотор Кикхейфера 43 л.с. (31,6 кВт), масса конструкции 99 кг, дальность полета 24 км, скорость 121 км/час, запас топлива 3,8 литра. /П.Бауэрс. Летательные аппараты нетрадиционных схем. М.: Мир, 1991, с.110, рис.5.19./
Недостатки известного аэросайкла определяются в основном недостатками воздушных винтов, которые сложны по конструкции, дороги в изготовлении и эксплуатации, имеют сложную конструкцию крепления к валу, создают повышенную опасность для пилота при аварии.
Указанные недостатки обусловлены конструкцией летательного аппарата и винтовым движителем вертикального подъема.
Известен также вертолет “Ротокрафт RH-1”, предназначенный для перевозки одного полностью вооруженного солдата на небольшое расстояние и содержащий трубчатый каркас с посадочными лыжами, несущий винт, хвостовой винт с ременным приводом, два жидкостно-реактивных двигателя, установленные на концах несущего винта с тягой 12,7 даН, механизмы управления. Рабочее тело двигателей - перекись водорода (90%), диаметр несущего винта 4,9 м, взлетная масса 181 кг, крейсерская скорость 113 км/час. /Там же, с.109, рис.5.18./
Известный вертолет “Ротокрафт RH-1”, как наиболее близкий по технической сущности и достигаемому полезному результату, принят за прототип.
Недостатки известного вертолета “Ротокрафт RH-1”, принятого за прототип, те же, а также повышенная масса, расход части жидкости на привод хвостового винта, большой расход рабочего тела и его высокая стоимость.
Указанные недостатки обусловлены конструкцией вертолета.
Целью настоящего изобретения является повышение технических и эксплуатационных характеристик индивидуального летательного аппарата.
Указанная цель согласно изобретению обеспечивается тем, что несущий и хвостовой винты, жидкостные реактивные двигатели заменены движителями вертикального подъема, выполненными в форме двух вертикальных цилиндрических корпусов, установленных по бокам трубчатого каркаса, внутри средней части каждого из которых размещены редукторы, ведомые валы которых закреплены вертикально, а концы их вставлены в подшипники, установленные на кронштейнах, привернутых к вертикальным цилиндрическим корпусам, причем на ведомых валах закреплены верхние и нижние диски, размещенные в вертикальных цилиндрических корпусах с некоторым зазором, причем на верхней поверхности каждого диска установлены ребра высотой 15-20 мм, образующие концентрические каналы, чередующиеся узкими и широкими участками, а на нижней поверхности каждого диска выполнены глухие радиальные каналы прямоугольного сечения, сужающиеся к центру, продольная ось каждого из которых составляет угол с вертикальной плоскостью, а входные отверстия направлены в сторону вращения дисков, боковые радиальные поверхности которых разны между собой, а поверхности дна каждого из глухих каналов параллельны верхней поверхности диска, кроме того, ведущие валы движителей вертикального подъема кинематически соединены через двойной конический дифференциал с тормозами, работающими в масле, блок конических шестерен для противоположного вращения дисков одного движителя вертикального подъема относительно дисков другого движителя вертикального подъема и соединительная муфта связаны с двигателем внутреннего сгорания, причем механизмы управления по крену кинематически связаны с тормозами двойного конического дифференциала, кроме того, движители вертикального подъема закреплены шарнирно в средней части с возможностью поворота в продольной плоскости на некоторый угол посредством гидромоторов, закрепленных на каркасе и соединенных трубопроводами с гидравлической системой, содержащей масляный насос, масляный бак и управляемые клапаны, которые связаны с механизмами управления, обеспечивающими передвижение индивидуального летательного аппарата вперед, назад, вращение на месте вокруг вертикальной оси и торможение, кроме того, каждый движитель вертикального подъема имеет указатель угла и направления наклона, каждый из которых содержит два полукруглых резистора, закрепленных на трубчатом каркасе и включенных в отдельные электрические цепи с противоположным направлением тока, подключенных к общему амперметру, шкала которого проградуирована в градусах поворота, два источника тока, подвижный контакт, закрепленный изолированно на цилиндрическом корпусе, подключенного к одной из клемм амперметра и взаимодействующего с полукруглыми резисторами, вертикальным стабилизатором с рулем направления, который посредством тросиков и блоков связан с ножными педалями, механизмом перемещения кресла пилота для балансировки летательного аппарата в продольной плоскости.
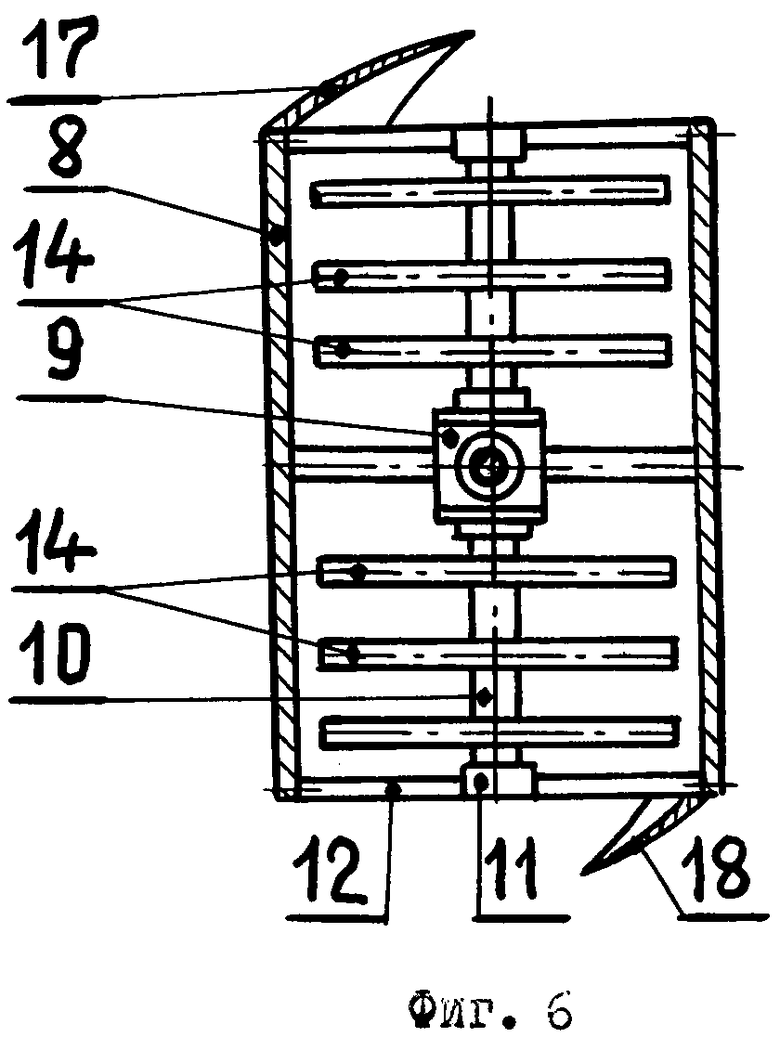
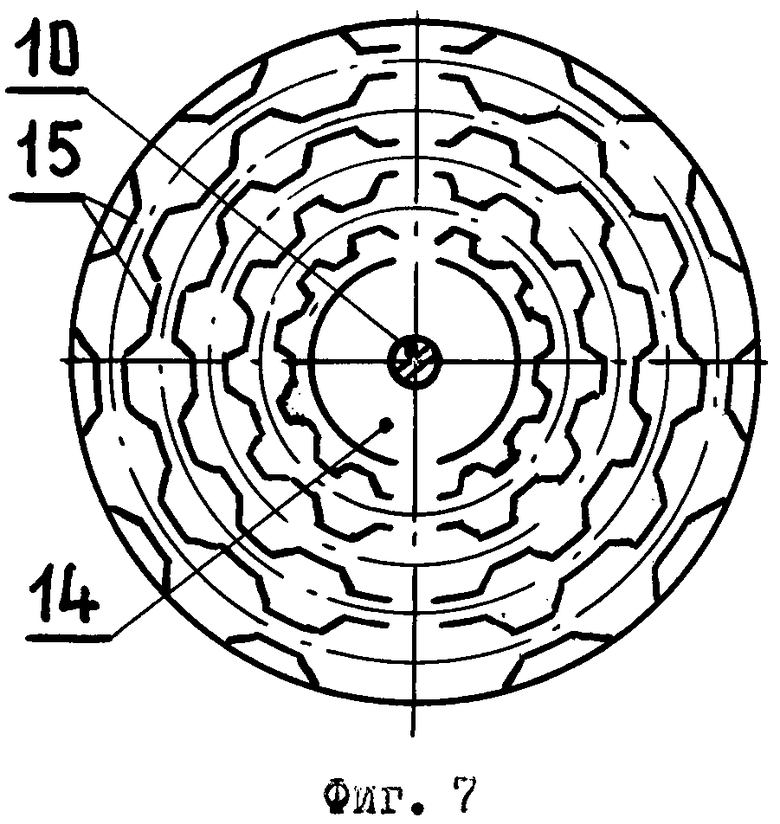
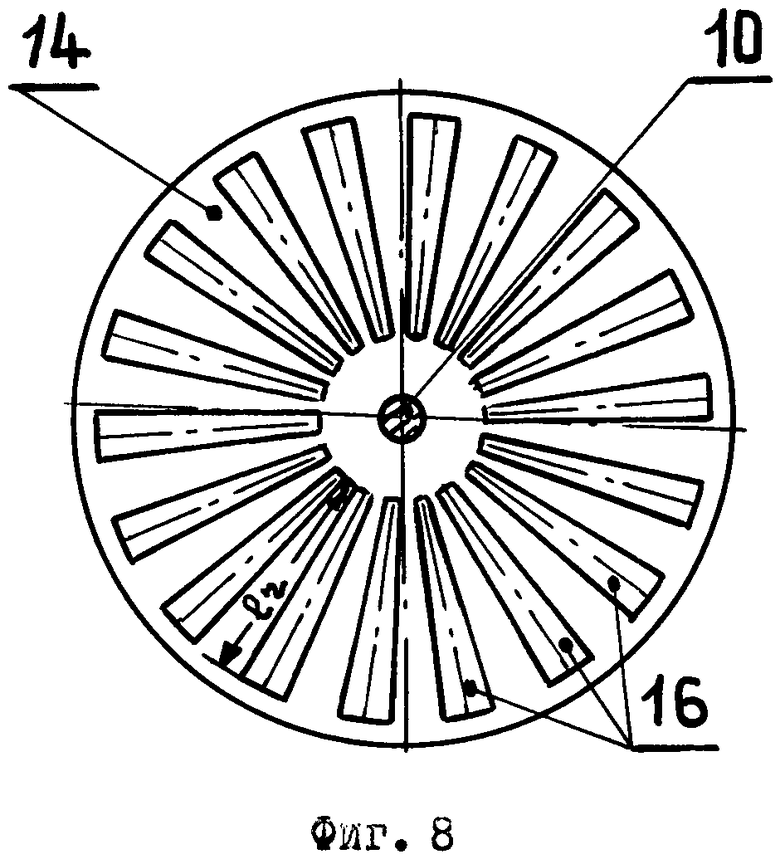
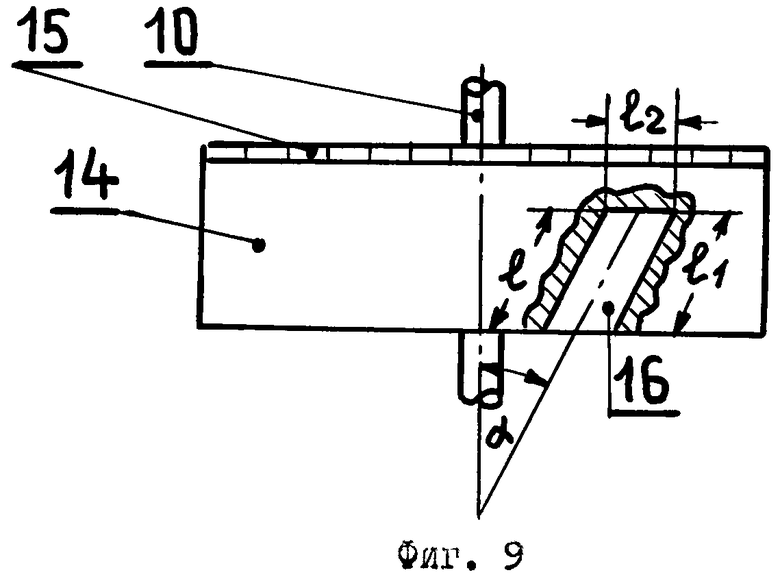
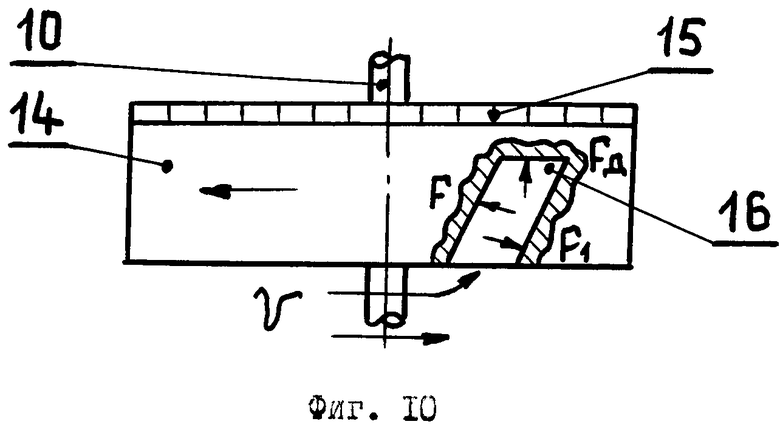
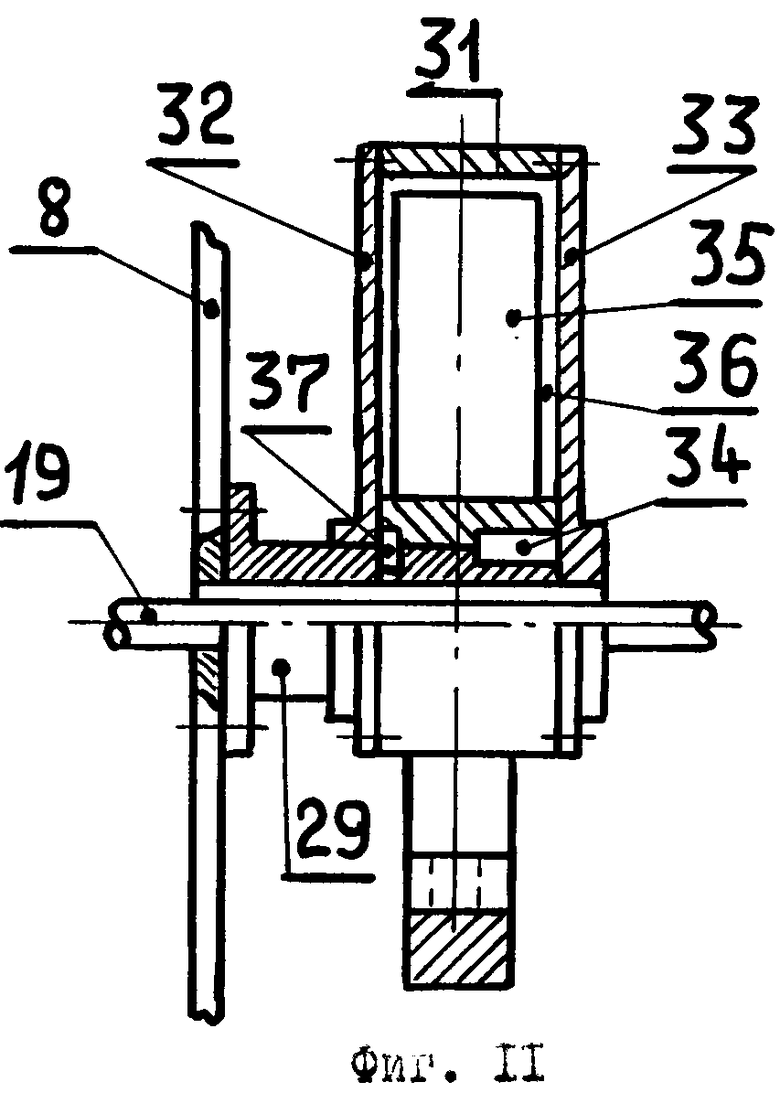
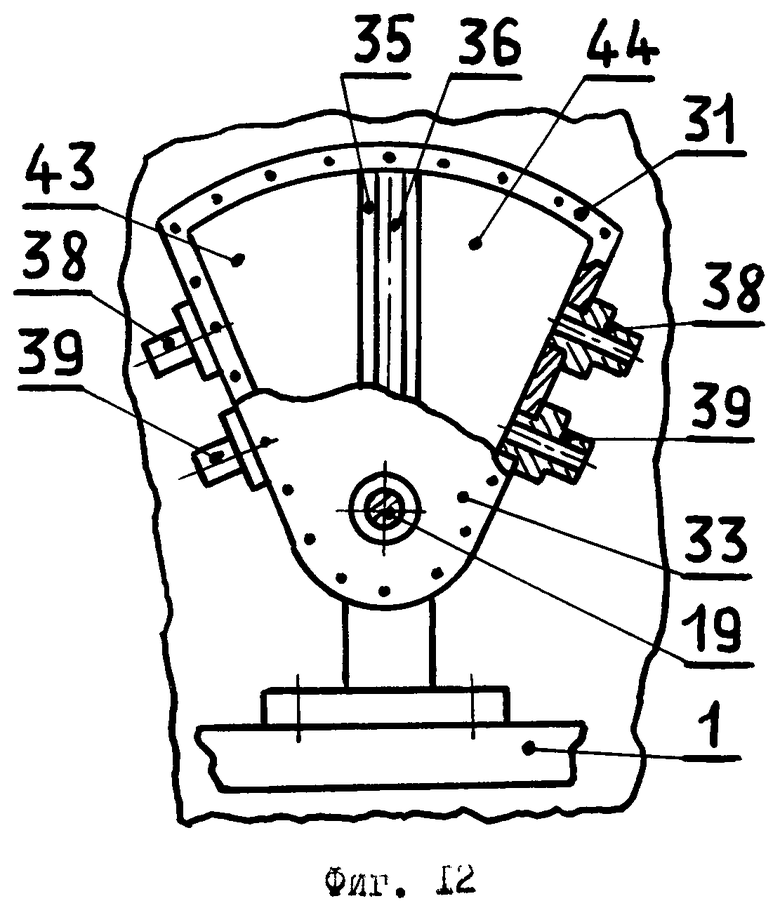
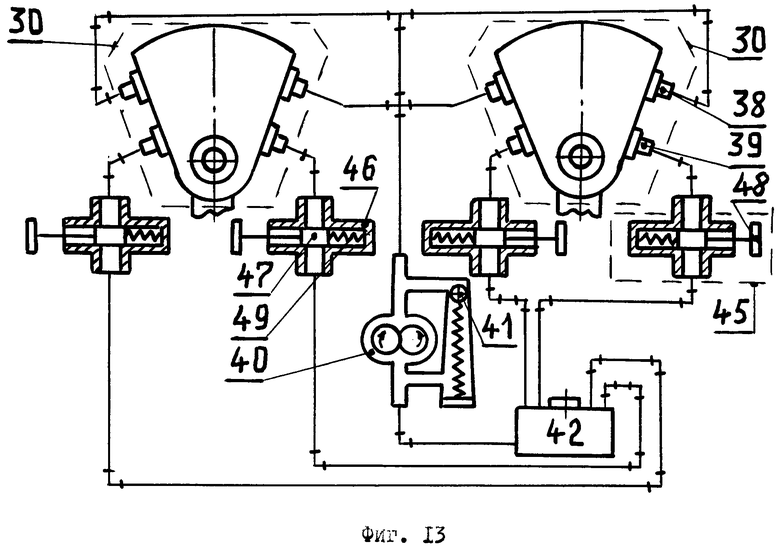
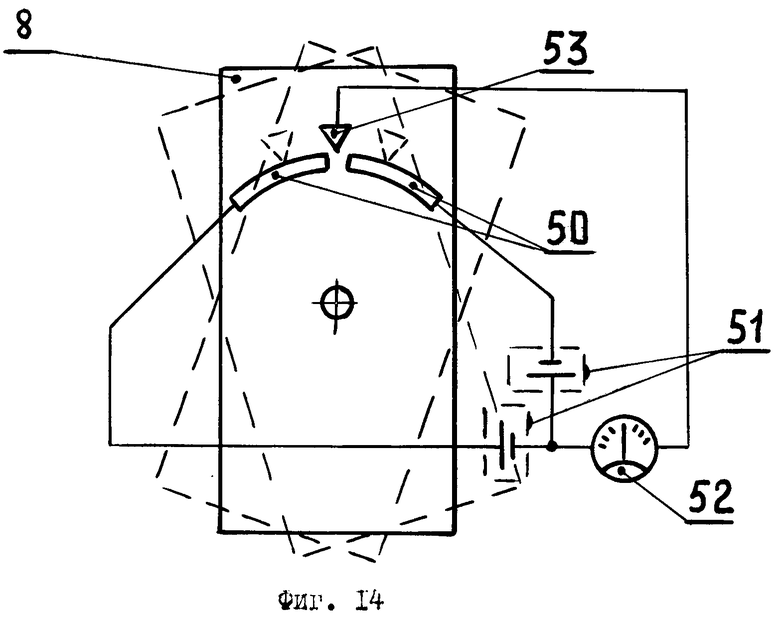
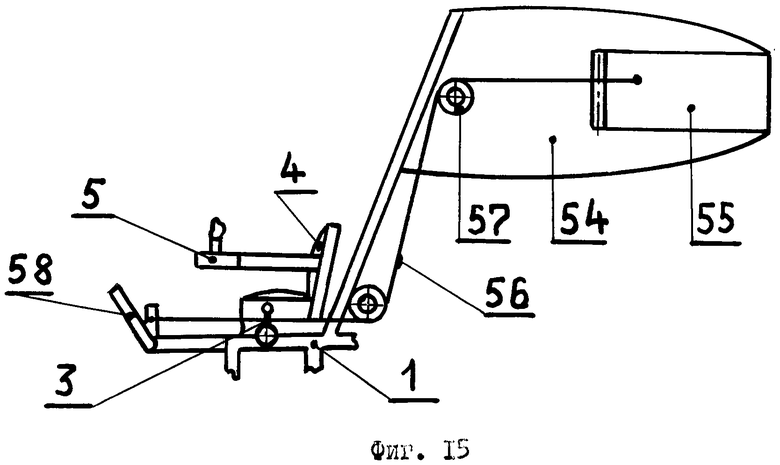
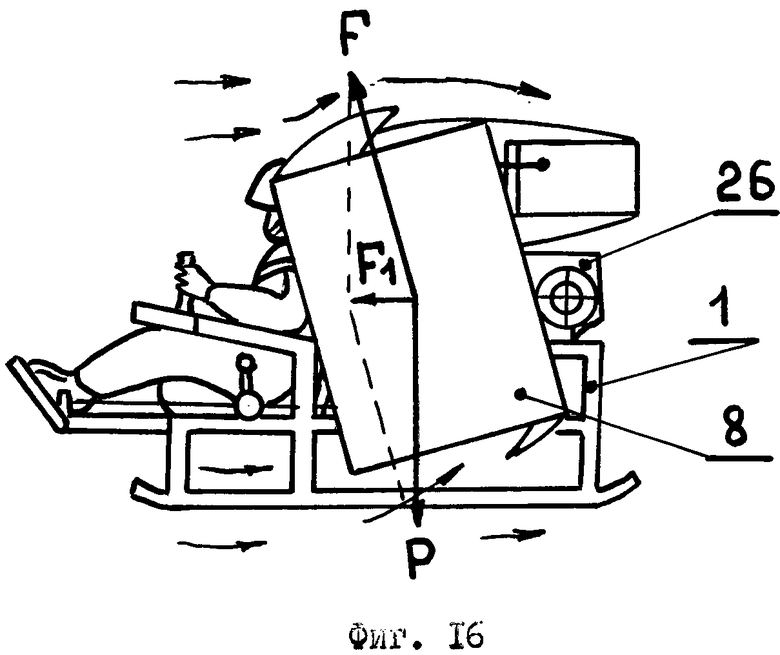
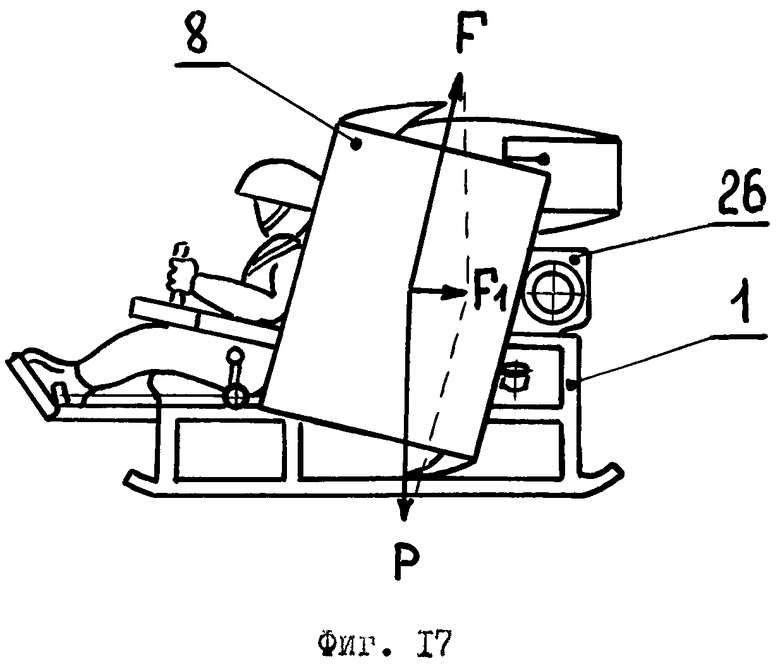
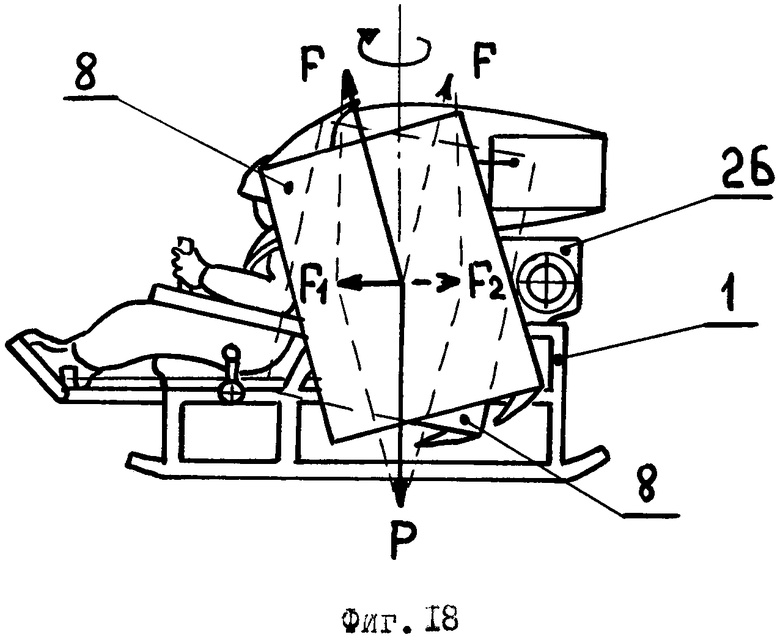
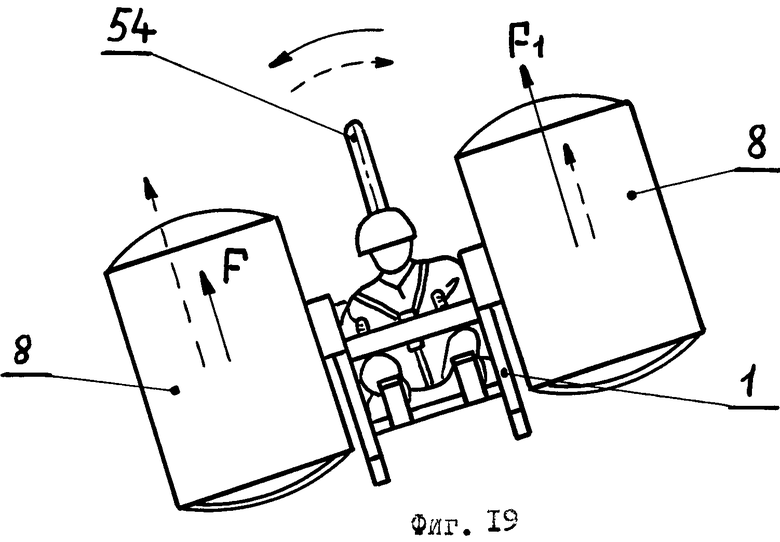
Сущность изобретения поясняется чертежами, где на фигуре 1 изображен общий вид индивидуального летательного аппарата, на фигуре 2 - вид сверху на индивидуальный летательный аппарат, на фигуре 3 - вид спереди на индивидуальный летательный аппарат, на фигуре 4 - схема силовой передачи, на фигуре 5 - общий вид движителя вертикального подъема, на фигуре 6 - вид на движитель вертикального подъема в разрезе, на фигуре 7 - вид сверху на диск движителя вертикального подъема, на фигуре 8 - вид снизу на диск движителя вертикального подъема, на фигуре 9 - вид сбоку на диск движителя вертикального подъема с частичным разрезом, на фигуре 10 - схема создания дополнительной подъемной силы на нижней поверхности диска движителя вертикального подъема, на фигуре 11 - общий вид гидродвигателя поворота цилиндрического корпуса движителя вертикального подъема с частичным разрезом, на фигуре 12 - вид на гидродвигатель сбоку с частичным разрезом, на фигуре 13 - схема (гидравлическая) управления гидромоторами, на фигуре 14 - электрическая схема указателя угла и направления наклона движителя вертикального подъема, на фигуре 15 - схема рулевого управления по курсу, на фигуре 16 - схема создания горизонтальной силы для перемещения летательного аппарата вперед, на фигуре 17 - схема создания горизонтальной силы для перемещения летательного аппарата назад, на фигуре 18 - схема возникновения сил, действующих при вращении летательного аппарата вокруг вертикальной оси, на фигуре 19 - схема создания крена вправо и влево.
Индивидуальный летательный аппарат содержит трубчатый каркас 1, имеющий в нижней части посадочные лыжи 2, на котором в передней части закреплено с возможностью продольного перемещения механизмом, не показанным на чертежах и имеющим ручку включения 3, кресло пилота 4. Кресло имеет подлокотники, соединенные друг с другом откидывающейся приборной доской 5, за которой размещены приборы и органы управления летательным аппаратом. В средней части по обеим сторонам трубчатого каркаса размещены движители вертикального подъема 6, 7, установленные симметрично друг другу на одной высоте. Оба движителя вертикального подъема одинаковы по конструкции и каждый из них содержит: вертикальный цилиндрический корпус 8, редуктор 9, размещенный в средней части на кронштейнах. Ведомый вал 10 редуктора установлен вертикально и его концы вставлены в подшипники 11, прикрепленные к цилиндрическому корпусу кронштейнами 12. На ведомом валу закреплены ведомая шестерня 13 редуктора, верхние и нижние диски 14, установленные в цилиндрическом корпусе с некоторым зазором для прохода воздуха. Все диски имеют одинаковое устройство. На верхней поверхности каждого диска установлены ребра 15 высотой 15-20 мм, образующие концентрические каналы, чередующиеся узкими и широкими участками. (Повышение подъемной силы такими каналами известно из патента РФ № 2385259.) В нижней части каждого диска выполнены глухие радиальные каналы 16 прямоугольного сечения, сужающиеся к центру, продольная ось каждого из которых составляет угол с вертикальной плоскостью α, а входное отверстие направлено в сторону вращения диска. Боковые радиальные поверхности каждого радиального канала равны между собой ℓ·ℓ2=ℓ1·ℓ2, а поверхность дна (ℓ2·ℓ2) параллельна верхней поверхности диска. (Повышение подъемной силы отверстиями на нижней поверхности диска известно из патента РФ № 2149800.) В верхней части цилиндрического корпуса закреплен обтекатель 17, а в нижней части установлен козырек 18. Ведущие валы 19 с закрепленными на них ведущими шестернями 20 редукторов кинематически соединены через двойной конический дифференциал 21 с тормозными барабанами 22 и тормозами 23, работающими в масле, блок конических шестерен 24 для противоположного вращения дисков одного движителя вертикального подъема относительно дисков другого и соединительной муфты 25 связаны с двигателем внутреннего сгорания 26, закрепленным на трубчатом каркасе позади кресла пилота. Под ним размещены топливный бак 27 и масляный бак 28. Механизмы управления креном кинематически связаны с тормозами двойного конического дифференциала. Каждый цилиндрический корпус движителей вертикального подъема закреплен, с возможностью поворота в продольной плоскости вперед и назад на некоторый угол, на одном конце пустотелого вала 29 гидромотора 30, имеющего корпус 31, закрепленный на трубчатом каркасе и закрытый передней 32 и задней 33 крышками. На другом конце пустотелого вала, на шпонке 34 закреплена лопасть 35 с элементами уплотнения 36. Пустотелый вал удерживается полукруглым сегментом 37. Через пустотелый вал проходит ведущий вал редуктора движителя вертикального подъема. На корпусе гидромотора расположены напорные 38 и сливные 39 штуцеры, которые трубопроводами соединены с масляным насосом 40, имеющим редукционный клапан 41, масляным баком 42. Лопасть гидромотора делит внутреннее пространство на две полости 43 и 44, каждая из которых соединена с напорной магистралью и сливной магистралью через управляемые клапаны 45. Управляемый клапан содержит корпус 46 с входным и выходным отверстиями, золотник 47 с кнопкой 48 и пружину 49. Нормальное положение клапана закрытое. Управляемые клапаны связаны с механизмами, обеспечивающими при полете движение вперед, назад, вращение на месте вокруг вертикальной оси, торможение. Каждый движитель вертикального подъема имеет указатель угла и направления наклона цилиндрического корпуса. Он содержит два полукруглых резистора 50, закрепленных на трубчатом каркасе, включенных в отдельные цепи с противоположным направлением электрического тока и двумя источниками 51. Обе цепи имеют общую точку и подключены к одной из клемм амперметра 52, шкала которого проградуирована в градусах поворота. Подвижный контакт 53 изолированно закреплен на цилиндрическом корпусе и при поворотах взаимодействует с полукруглыми резисторами. Он подключен ко второй клемме амперметра. В задней части установлен вертикальный стабилизатор 54 с рулем направления 55, который посредством тросиков 56 и блоков 57 соединен с ножными педалями 58.
Работа индивидуального летательного аппарата
После проверки всех систем управления и двигателя производится вывешивание летательного аппарата. Для этого он подвешивается на трос за крючок (не показан) в точке, проходящей через центр тяжести ЦТ. Пилот занимает свое место в кресле 4 и далее в зависимости от веса пилота посредством ручки 3 производится балансировка и уравновешивание летательного аппарата в продольной плоскости путем передвижения кресла 4 вместе с пилотом вперед или назад. После уравновешивания кресло закрепляется неподвижно. Уравновешивание необходимо проводить при смене пилота. После выполнения этой операции трос отцепляется и запускается двигатель 26. Для взлета движители вертикального подъема устанавливаются вертикально, как показано на фигуре 1, затем путем увеличения частоты вращения вала двигателя и соответственно увеличения подъемной силы происходит уравновешивание веса летательного аппарата. Как только подъемная сила превысит вес летательного аппарата, он оторвется от поверхности Земли и станет перемещаться вертикально вверх. При этом движители вертикального подъема 6 работают следующим образом. Вал двигателя 26 вращает двойной конический дифференциал 21, блок шестерен 24 и ведущие валы 19. Ведущие шестерни 20 через ведомые шестерни 13 приводят во вращение ведомые валы 10 и диски 14, которые у одного движителя вертикального подъема вращаются по часовой стрелке, а у другого - против часовой стрелки. При вращении дисков 14 на верхней и нижней поверхностях возникает движущийся пограничный слой, который возникает при движении любого тела в воздухе. Давление воздуха в пограничном слое всегда меньше, чем давление неподвижного воздуха. Так, как площадь верхней поверхности диска, обдуваемой воздухом, больше нижней поверхности за счет радиальных каналов 16, дно которых не обтекается воздухом, то на верхней поверхности дисков 14 создается большее разрежение, чем на нижней поверхности. Эта разность и является подъемной силой. Кроме того, подъемная сила на верхней поверхности диска дополнительно увеличивается за счет ребер 15, которые заставляют воздух двигаться с более высокой скоростью по узким частям, которые по площади занимают 1/3 верхней поверхности диска. Воздух по широким частям концентрических каналов движется со скоростью вращения диска, а при движении по узким частям скорость воздуха увеличивается во столько раз, во сколько раз ширина узкой части канала меньше ширины широкой части канала. Это на 1/3 уменьшает давление воздуха на верхнюю поверхность диска и на столько раз увеличивает разрежение над ней. Возникающий пограничный слой бывает от 0,5 до 5,0 мм и он не может выйти из концентрических каналов. Кроме того, подъемная сила также увеличивается за счет радиальных глухих каналов на нижних поверхностях дисков 14 (фиг.10). При обтекании воздушным потоком нижней поверхности диска со скоростью υ часть воздушного потока поступает внутрь глухих радиальных каналов, сжимается там и производит давление на дно и стенки этих каналов. Так как стенки каналов по площади равны, то и силы, действующие на них, будут равны и станут уравновешивать друг друга F=F1. Сила Fд, действующая на дно канала, ничем не уравновешена и станет увеличивать подъемную силу диска. Все эти силы, действующие на диски 14, и являются подъемной силой движителей вертикального подъема 6. При подъеме на некоторую высоту и висении на месте под действием ветра может нарушиться равновесие аппарата в поперечной плоскости и возникнет крен на правый или левый борт или его необходимо искусственно создать, например, на поворотах. Для восстановления равновесия в поперечной плоскости необходимо увеличить подъемную силу опускающегося движителя вертикального подъема и уменьшить подъемную силу поднимающегося движителя вертикального подъема. Для этого необходимо тормозом 23 воздействовать на тормозной диск 22 двойного конического дифференциала 21 того движителя вертикального подъема, который при крене движется вверх. Подъемная сила движителя вертикального подъема 6 или 7, движущегося вверх, уменьшится, а другого, движущегося вниз, на столько же возрастет, и летательный аппарат займет горизонтальное положение. Аналогично и при создании крена необходимо увеличивать или уменьшать подъемную силу того или иного движителя вертикального подъема (фиг.19). Для движения летательного аппарата вперед после набора необходимой высоты необходимо одновременно нажать на кнопки 48 левых управляемых клапанов 45. Масло из левых полостей гидромоторов станет сливаться в масляный бак 42 и давление в них уменьшится (фиг.13), а в правых полостях, связанных с напорными магистралями, останется таким же. В результате лопасти 35 повернутся и повернут цилиндрические корпусы 8 движителей вертикального подъема 6 и 7 так, как показано на фигуре 16. Подъемная сила F обоих движителей вертикального подъема будет действовать под углом к силе тяжести Р. Возникающая сила F1 будет перемещать летательный аппарат в горизонтальном направлении. Чем больше подъемная сила и чем больше угол наклона движителей вертикального подъема, тем больше скорость полета. Торможение и движение назад осуществляется нажатием на кнопки 48 правых управляемых клапанов 45. Лопасти 35 гидромоторов 30 повернутся в противоположную сторону и туда же повернут цилиндрические корпусы 8 движителей вертикального подъема 6, 7 (фиг.17). Горизонтальная сила F1 станет перемещать летательный аппарат назад или производить торможение. Для разворота на месте в воздухе необходимо нажать на соответствующие кнопки 48 управляемых клапанов 45 и развернуть оба движителя вертикального подъема в противоположные стороны (фиг.18). Возникающие силы F1 и F2, направленные в разные стороны, будут вращать летательный аппарат вокруг вертикальной оси. При висении на месте под действием ветра может нарушиться равновесие в продольной плоскости и летательный аппарат начнет наклоняться вперед или назад. В данном случае для поддержания равновесия необходимо быстро оба движителя вертикального подъема 6, 7 отклонить в соответствующую сторону. При наклоне летательного аппарата назад движители вертикального подъема отклонять в направлении, показанном на фигуре 16. При наклоне летательного аппарата вперед движители вертикального подъема отклонять в направлении, показанном на фигуре 17. В процессе полета пилоту необходимо знать, в каком положении находятся цилиндрические корпуса 8 движителей вертикального подъема 6, 7, в какую сторону и на какой угол они отклонены. Указатели направления и угла наклона в любой момент указывают местоположение цилиндрических корпусов 8 следующим образом. Если цилиндрический корпус 8 расположен вертикально, то подвижный контакт 53 находится посередине между двумя полукруглыми резисторами 50 и ток в обеих цепях отсутствует, так как они разомкнуты. Стрелка амперметра находится в средней части шкалы. При повороте цилиндрического корпуса 8 по часовой стрелке на некоторый угол вместе с ним поворачивается и подвижный контакт 53, который взаимодействует с правым полукруглым резистором 50 (на фигуре 14 показано пунктиром). В цепи, в которую включен левый полукруглый резистор 50, начинает протекать электрический ток от одного из источников 51, направление которого определяется полярностью подключения источника тока, и стрелка амперметра отклоняется в ту же сторону. Чем больше отклонение цилиндрического корпуса 8, тем меньше сопротивление в цепи и тем больше ток, а значит, на больший угол отклоняется стрелка амперметра. При повороте цилиндрического корпуса 8 против часовой стрелки подвижный контакт 53 начнет взаимодействовать с правым полукруглым резистором 50, включая электрическую цепь и по мере увеличения угла наклона, уменьшая в цепи сопротивление. Стрелка амперметра отклоняется в ту же сторону на соответствующий угол. Указатель направления и угла наклона второго движителя вертикального подъема работает также. Во время горизонтального полета управление по курсу осуществляется рулем направления 55. При нажатии на левую или правую педаль соединенный с ней рычаг поворачивается против часовой стрелки и тянет за собой тросик 56, который, двигаясь по блокам 57, отклоняет руль направления 55. По прибытии к месту назначения Движители вертикального подъема переводятся в вертикальное положение, как показано на фигуре 1, частота вращения вала двигателя 26 уменьшается, что вызывает соответствующее уменьшение подъемной силы. Летательный аппарат медленно опускается и производит посадку на выбранное место.
Предлагаемый индивидуальный летательный аппарат может быть использован в геологоразведке, для наблюдения за газо-нефтепроводами, регулировании движения на улицах города, охране лесных участков и для других целей.
Положительный эффект: простота конструкции и управления, отсутствие нисходящих потоков воздуха при работе движителей вертикального подъема, более высокая безопасность, использование более дешевого топлива.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОМОБИЛЬ | 1999 |
|
RU2148004C1 |
| Аэромобиль | 2015 |
|
RU2609541C1 |
| АЭРОМОБИЛЬ | 2011 |
|
RU2476353C1 |
| Аэромобиль | 2016 |
|
RU2617000C1 |
| АЭРОМОБИЛЬ | 2019 |
|
RU2715099C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2013 |
|
RU2538484C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2006 |
|
RU2301750C1 |
| Аэродинамическое судно | 2015 |
|
RU2609577C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 1999 |
|
RU2149109C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2011 |
|
RU2470808C1 |
Изобретение относится к области авиации, более конкретно к индивидуальному летательному аппарату. Аппарат содержит трубчатый каркас с посадочными лыжами и креслом пилота, двигатель, соединительную муфту, движители вертикального подъема, механизмы управления. Движители выполнены в форме двух вертикальных цилиндрических корпусов, установленных по бокам трубчатого каркаса. Внутри каждого движителя размещены редуктор с вертикальным ведомым валом, верхние и нижние диски, закрепленные на вертикальном валу. На верхней поверхности каждого диска установлены ребра высотой 15-20 мм, образующие концентрические каналы, чередующиеся узкими и широкими участками. На нижней поверхности каждого диска выполнены глухие радиальные каналы прямоугольного сечения, сужающиеся к центру, продольная ось каждого из которых составляет угол с вертикальной плоскостью, а входные отверстия направлены в сторону вращения диска. Ведущие валы движителей вертикального подъема кинематически соединены через двойной конический дифференциал с тормозами, работающими в масле, блок конических шестерен противоположного вращения дисков движителей вертикального подъема и соединительную муфту связаны с двигателем внутреннего сгорания. В задней части каркаса закреплен вертикальный стабилизатор с рулем направления, который посредством тросиков и блоков связан с ножными педалями. Для продольной балансировки летательного аппарата в передней части размещен механизм перемещения кресла пилота. Технический результат заключается в упрощении конструкции летательного аппарата и повышении безопасности. 19 ил.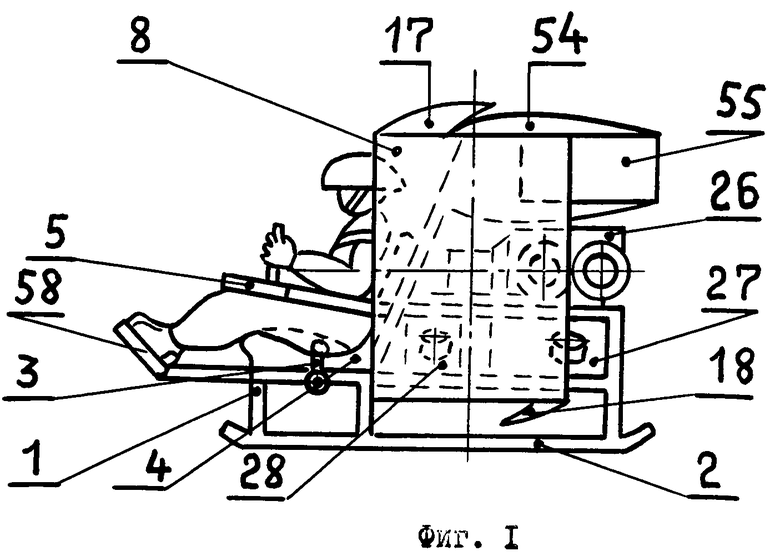
Индивидуальный летательный аппарат, содержащий трубчатый каркас с посадочными лыжами и креслом пилота, двигатель, соединительную муфту, движители вертикального подъема, механизмы управления, отличающийся тем, что движители вертикального подъема выполнены в форме двух вертикальных цилиндрических корпусов, установленных по бокам трубчатого каркаса, внутри средней части каждого из которых размещены редукторы, ведомые валы которых закреплены вертикально, а концы их вставлены в подшипники, установленные на кронштейнах, привернутых к вертикальным цилиндрическим корпусам, причем на ведомых валах закреплены верхние и нижние диски, размещенные в вертикальных цилиндрических корпусах с некоторым зазором, причем на верхней поверхности каждого диска установлены ребра высотой 15-20 мм, образующие концентрические каналы, чередующиеся узкими и широкими участками, а на нижней поверхности каждого диска выполнены глухие радиальные каналы прямоугольного сечения, сужающиеся к центру, продольная ось каждого из которых составляет угол с вертикальной плоскостью, а входные отверстия направлены в сторону вращения дисков, боковые радиальные поверхности которых равны между собой, а поверхности дна каждого из глухих каналов параллельны верхней поверхности диска, кроме того, ведущие валы движителей вертикального подъема кинематически соединены через двойной конический дифференциал с тормозами, работающими в масле, блок конических шестерен для противоположного вращения дисков одного движителя вертикального подъема относительно дисков другого движителя вертикального подъема и соединительную муфту связаны с двигателем внутреннего сгорания, причем механизмы управления креном кинематически связаны с тормозами двойного конического дифференциала, кроме того, движители вертикального подъема закреплены шарнирно в средней части с возможностью поворота в продольной плоскости на некоторый угол посредством гидромоторов, закрепленных на каркасе и соединенных трубопроводами с гидравлической системой, содержащей масляный насос, масляный бак и управляемые клапаны, которые связаны с механизмами управления, обеспечивающими передвижение индивидуального летательного аппарата вперед, назад, вращение на месте вокруг вертикальной оси и торможение, кроме того, каждый движитель вертикального подъема имеет указатель угла и направления наклона, каждый из которых содержит два полукруглых резистора, закрепленных на трубчатом каркасе и включенных в отдельные электрические цепи с противоположным направлением тока, подключенных к одной из клемм общего амперметра, шкала которого проградуирована в градусах поворота, два источника электрического тока, подвижный контакт, закрепленный изолированно на цилиндрическом корпусе, подключенный ко второй клемме амперметра и взаимодействующий с полукруглыми резисторами, кроме того, в задней части трубчатого каркаса закреплен вертикальный стабилизатор с рулем направления, который посредством тросиков и блоков связан с ножными педалями, кроме того, для продольной балансировки летательного аппарата в передней части размещен механизм перемещения кресла пилота в продольной плоскости.
| US 2008011898 A1, 17.01.2008 | |||
| WO 2009157780 A1, 30.12.2009 | |||
| УСОВЕРШЕНСТВОВАННАЯ СИСТЕМА ДЛЯ ЦЕНТРИРОВАНИЯ ГИДРОМАШИНЫ НА ЭЛЕМЕНТЕ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2667568C2 |
| АЭРОМОБИЛЬ | 2007 |
|
RU2362709C2 |
| АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2003 |
|
RU2240261C1 |
| RU 95102360 A1, 27.11.1996. | |||

