Изобретение относится к области вертолетостроения и может быть использовано в малой авиации для повышения безопасности летательных аппаратов.
Известно устройство для перемещения аппаратов в воздушном пространстве - вертолет (см., например, книгу Юрьева Б.Н. Аэродинамический расчет вертолетов. Оборонгиз, М., 1956 г.). Основной недостаток этого устройства - шарнирная подвеска лопастей, наличие автомата-перекоса для создания горизонтальной составляющей тяги, хвостового винта для парирования реактивного момента, создаваемого несущим винтом. Это усложняет его конструкцию и тем самым снижает его надежность.
Известен гидроаэродинамический движитель, выполненный в виде турбомашины, содержащей корпус с боковой внутренней поверхностью и двумя торцевыми внутренними поверхностями, между которыми с минимальными зазорами установлено в корпусе с возможностью вращения рабочее колесо в виде втулки с плоскими радиальными лопатками, закрепленными перпендикулярно плоскости вращения, внутренняя боковая поверхность корпуса выполнена в виде полуцилиндра, установленного с минимально возможным зазором между цилиндром и лопатками, и двух плавно сопряженных с поверхностью полуцилиндра и параллельных между собой плоскостей, длина каждой из которых не менее радиуса полуцилиндра, при этом внутренние поверхности торцов корпуса выполнены в виде плоскостей, ограниченных внутренней боковой поверхностью и линиями, соединяющими концы боковых плоскостей, причем один из торцов имеет вырез, радиус которого меньше радиуса внутренней боковой поверхности корпуса (см. патент РФ №2136539 того же автора). Этот движитель может создавать тягу, вектор которой лежит в плоскости вращения рабочего колеса движителя.
Известен аппарат вертикального взлета и посадки по заявке №2000131636/28 того же автора, по которой принято положительное решение. В этом аппарате использован этот гидроаэродинамический движитель для создания горизонтальной тяги. С ним кинематически соединен двигатель, который может подсоединяться к движителю вертикальной тяги, в случае отказа двигателя последнего, что повышает безопасность полета. Этот аппарат является наиболее близким по своей технической сущности к предлагаемому (прототип).
Недостатком прототипа является то, что в случае отказа одновременно двух двигателей авария неизбежна. Поэтому дальнейшее повышение безопасности является необходимостью.
Указанные недостатки аналогов и прототипа устраняются тем, что аппарат вертикального взлета и посадки содержит кресло пилота, закрепленное на раме, на боковых частях которой выполнены два соосных между собой отверстия, два гидроаэродинамических движителя, каждый из которых выполнен в виде турбомашины, содержащей корпус с боковой внутренней поверхностью и двумя торцевыми внутренними поверхностями, между которыми с минимальными зазорами установлено в корпусе с возможностью вращения рабочее колесо в виде втулки с плоскими радиальными лопатками, закрепленными перпендикулярно плоскости вращения, внутренняя боковая поверхность корпуса выполнена в виде полуцилиндра, установленного с минимально возможным зазором между полуцилиндром и лопатками, и двух плавно сопряженных с поверхностью полуцилиндра и параллельных между собой плоскостей, длина каждой из которых не менее радиуса полуцилиндра, при этом внутренние поверхности торцов корпуса выполнены в виде плоскостей, ограниченных внутренней боковой поверхностью и линиями, соединяющими концы боковых плоскостей, причем один из торцов имеет вырез, радиус которого меньше радиуса внутренней боковой поверхности корпуса, корпусы движителей установлены в боковых отверстиях рамы с возможностью поворота и фиксации поворота по обе стороны от кресла пилота, шасси, жестко скрепленное с нижней частью рамы, снабженное упруго установленными колесами, ось, установленную в корпусах движителей с возможностью вращения, двигатель, установленный на шасси и кинематически связанный с осью, конус, обращенный вершиной вниз, а основанием вверх и скрепленный жестко с верхней частью рамы, при этом рабочие колеса движителей закреплены на оси.
Такое выполнение аппарата позволяет, в случае отказа двигателя, произвести вертикальный спуск аппарата со скоростью не более 4 м/с, т.е. практически безопасной. При этом возможно планирование.
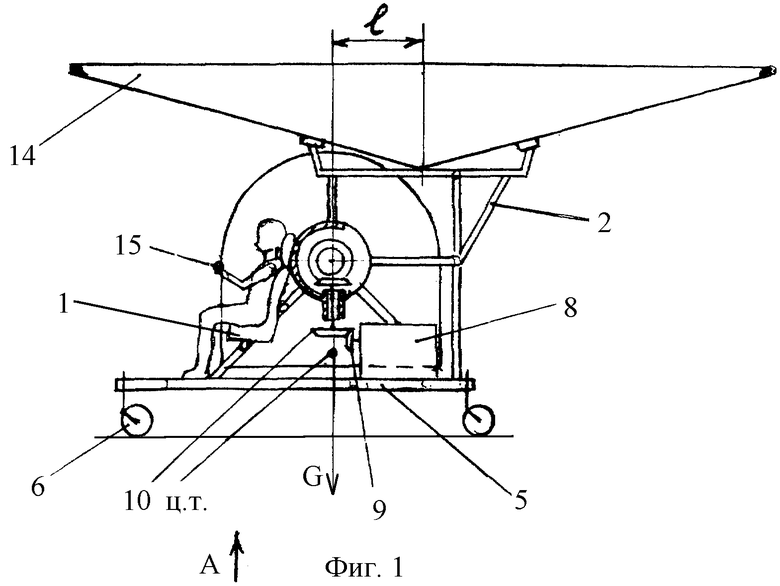
На фиг.1 дан схематический чертеж предлагаемого аппарата - продольный разрез.
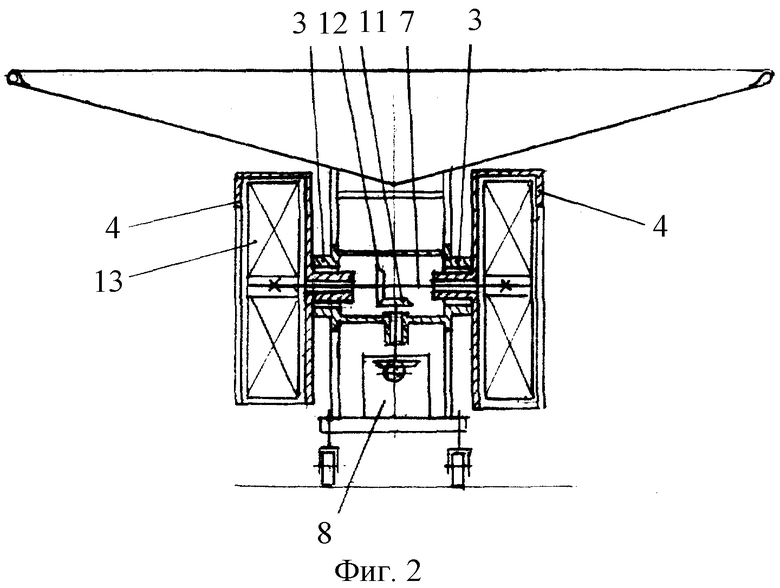
На фиг.2 - вид сбоку.
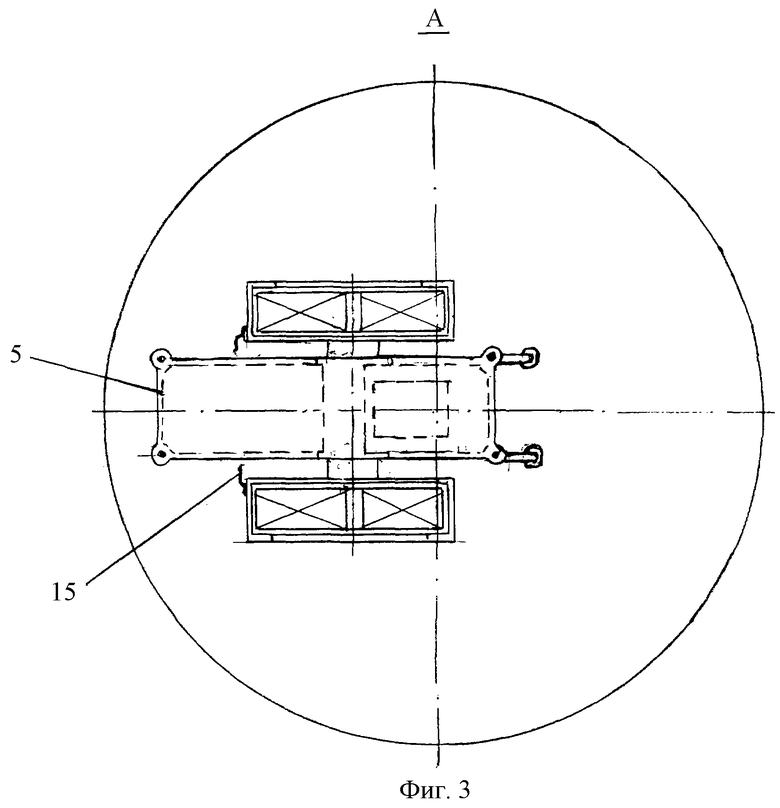
На фиг.3 - вид снизу.
Аппарат состоит из кресла пилота 1, закрепленного на раме 2, выполненной сварной из труб. На боковых частях рамы имеются две втулки 3 с отверстиями, соосными между собой. В каждом отверстии установлен корпус гидроаэродинамического движителя 4 с возможностью поворота и фиксации в нем.
С нижней частью рамы 2 скреплено шасси 5, снабженное упруго установленными колесами 6. В корпусах движителей 4 с возможностью вращения установлена ось 7. На шасси 5 закреплен двигатель 8 со всеми агрегатами и устройствами для его обслуживания. Органы управления двигателем (педаль "газа") вынесены на кресло пилота.
С помощью зубчатых колес 9, 10, 11, 12 двигатель соединен с осью 7, на концах которой в корпусах движителей установлены их рабочие колеса 13. К верхней части рамы прикреплен конус 14, представляющий собой жесткий каркас, обтянутый воздухонепроницаемой тканью.
Центр тяжести аппарата отнесен вперед по направлению полета от вершины конуса на расстояние не менее одной четвертой радиуса основания конуса (l).
Конус имеет угол при вершине в пределах 140-150°. Корпусы движителей снабжены ручками 15, за которые пилот поворачивает корпусы, изменяя направление векторов тяги движителей.
Аппарат работает следующим образом. При вертикальном подъеме корпусы движителей расположены почти вертикально, полуцилиндром вверх, как указано на фиг.1. При наборе высоты корпусы наклоняются вперед и аппарат получает горизонтальное перемещение. В это время начинает работать подъемная сила, возникающая при горизонтальной обдувке конуса, и мощность двигателя расходуется в основном на горизонтальное перемещение аппарата. Для изменения направления полета необходимо развернуть корпус одного из движителей в сторону уменьшения горизонтальной составляющей тяги. Если взлет производить по наклонной траектории, то направление корпусов движителей почти горизонтальное, аппарат получает горизонтальную скорость, на конус действует подъемная сила, и аппарат отрывается от земли. В случае отказа двигателя в полете (или других элементов силовой установки) конус оказывает сопротивление падению. Силу этого сопротивления можно вычислить по известной формуле 
где Сх - коэффициент лобового сопротивления конуса набегающему потоку;
S - площадь миделя конуса;
ρ - плотность воздуха;
V - скорость падения.
Чтобы падение происходило с постоянной скоростью, необходимо выполнение условия Q=G, где G - вес аппарата.
Можно воспользоваться данными проведенного опыта, в котором определена скорость падения V=1 м/c при D=0,6 м и G=0,25 кг, где D - диаметр основания конуса модели. Для натурного образца с Dн=6 м при скорости падения V=4 м/c получим

Скорость падения, равная 4 м/с, считается безопасной при ходе шасси h=0,08 м (см. цитированную выше книгу Б.Н.Юрьева, с. 332).
Аппарат общим весом 400 кг с диаметром конуса Dн=6 м вполне осуществим на практике и может использоваться в качестве индивидуального пилотируемого средства в малой авиации.
В отличие от мотодельтаплана он не требует площадки для взлета и посадки.
Вследствие внецентренной установки конуса относительно общего центра тяжести аппарата при аварийном спуске возможно планирование, что важно для выбора места посадки.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2003 |
|
RU2240958C1 |
| АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2000 |
|
RU2198113C2 |
| СНЕГОХОД | 2005 |
|
RU2279373C1 |
| БЕЗАЭРОДРОМНЫЙ САМОЛЕТ | 2006 |
|
RU2306241C1 |
| ГИДРОАЭРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 1998 |
|
RU2136539C1 |
| ЕДИНЫЙ АЭРОНАЗЕМНЫЙ ДВИЖИТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735442C1 |
| НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ С ПАЛУБНЫМ АВИАЦИОННЫМ УДАРНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2721808C1 |
| АЭРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 1998 |
|
RU2153442C2 |
| АЭРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 1997 |
|
RU2118600C1 |
| ПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ДОПОЛНИТЕЛЬНЫМ ВОДОРОДНЫМ МОДУЛЕМ | 2014 |
|
RU2571153C1 |
Изобретение относится к области вертолетостроения и может быть использовано в малой авиации для повышения безопасности индивидуально пилотируемых летательных аппаратов. Аппарат содержит два гидроаэродинамических движителя, расположенные по обе стороны от кресла пилота, которое укреплено на трубчатой раме, нижняя часть которой установлена на шасси, снабженном упруго установленными колесами. Корпусы движителей установлены во втулках рамы с возможностью поворота и фиксации, благодаря чему достигается управление аппаратом. Движители кинематически соединены с двигателем, установленным на шасси аппарата. К верхней части рамы прикреплен конус вершиной вниз, основанием вверх. Конус выполнен из жесткого каркаса, обтянутого воздухонепроницаемой тканью. Центр тяжести аппарата вынесен от оси конуса вперед по направлению полета на расстояние не менее одной четвертой радиуса основания конуса. Технический результат заключается в повышении безопасности использования индивидуально пилотируемых летательных аппаратов. 3 ил.
Аппарат вертикального взлета и посадки, содержащий кресло пилота, закрепленное на раме, на боковых частях которой выполнены два соосных между собой отверстия, два гидроаэродинамических движителя, каждый из которых выполнен в виде турбомашины, содержащей корпус с боковой внутренней поверхностью и двумя торцевыми внутренними поверхностями, между которыми с минимальными зазорами установлено в корпусе с возможностью вращения рабочее колесо в виде втулки с плоскими радиальными лопатками, закрепленными перпендикулярно плоскости вращения, внутренняя боковая поверхность корпуса выполнена в виде полуцилиндра, установленного с минимально возможным зазором между полуцилиндром и лопатками, и двух плавно сопряженных с поверхностью полуцилиндра и параллельных между собой плоскостей, длина каждой из которых не менее радиуса полуцилиндра, при этом внутренние поверхности торцов корпуса выполнены в виде плоскостей, ограниченных внутренней боковой поверхностью и линиями, соединяющими концы боковых плоскостей, причем один из торцов имеет вырез, радиус которого меньше радиуса внутренней боковой поверхности корпуса, корпусы движителей установлены в боковых отверстиях рамы с возможностью поворота и фиксации поворота по обе стороны от кресла пилота, шасси, жестко скрепленное с нижней частью рамы, снабженное упругоустановленными колесами, ось, установленную в корпусах движителей с возможностью вращения, двигатель, установленный на шасси и кинематически связанный с осью, конус, обращенный вершиной вниз, а основанием вверх, и скрепленный жестко с верхней частью рамы, при этом рабочие колеса движителей закреплены на оси.
| Б.Н.ЮРЬЕВ | |||
| Аэродинамический расчет вертолетов | |||
| - М.: Оборонгиз, 1956, с | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| RU 2000131636 А, 20.12.2002 | |||
| ГИДРОАЭРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 1998 |
|
RU2136539C1 |
| US 3915411 А, 28.10.1975 | |||
| US 3689011 A, 05.09.1972. | |||

