Предлагаемое техническое решение относится к технике эксплуатации ядерных канальных реакторов, касается, в частности, способов оценки остаточного ресурса телескопических соединений трактов и может быть использовано для контроля за состоянием телескопических соединений трактов в период проведения ремонта.
В процессе эксплуатации ядерного уран-графитового реактора в результате радиационно-термических воздействий происходит объемная радиационная усадка графита, которая приводит к значительному сокращению геометрических размеров графитовых блоков и графитовых колонн, в частности высота графитовых колонн может уменьшиться на 250÷270 мм за 45 лет эксплуатации. По результатам контроля, проведенного на энергоблоке №1 Ленинградской АЭС, установлено максимальное уменьшение высоты колонн графитовой кладки реактора на 228 мм за 28 лет эксплуатации. В ядерных уран-графитовых реакторах предусмотрен конструктивный телескопический узел, выполняющий функцию центрирующего элемента ячейки реактора и компенсатора перемещений сборок реактора, связанных с изменением температуры и радиационной усадкой графита. Конструктивно узел выполнен в виде телескопического соединения трактов (ТСТ): верхний тракт жестко связан с нижней плитой, а нижний тракт - с графитовой колонной ячейки реактора. Проектный рабочий ход ТСТ составляет 225 мм. Указанный параметр является одним из основных критериев, определяющих длительность эксплуатации реактора. Радиационная усадка графитовой колонны на величину, соответствующую рабочему ходу ТСТ и более, недопустима. С целью обеспечения безопасной работы ядерного реактора необходимо постоянно контролировать состояние ТСТ. В настоящее время известно несколько способов измерения и оценки остаточной величины ТСТ. Один из них заключается в измерении остаточной величины ТСТ со стороны внутренней поверхности трактов при извлеченной тепловыделяющей сборке (ТВС) через стенку технологического канала с помощью вихретокового преобразователя. (Федеральное агентство по атомной энергии. Общество с ограниченной ответственностью «Пролог», «Методика выполнения измерений геометрических параметров ТК и КСУЗ реакторов РБМК-1000» ШФВИ. ИСТК-5.000.00 МИ, г.Обнинск, 2006 г.) Недостатком способа является то, что для проведения контроля требуется извлечение ТВС с ее последующей загрузкой в ячейку. Известен также способ измерения остаточной величины ТСТ со стороны внутренней поверхности трактов при извлеченном технологическом канале (ТК) с помощью специальной видеоизмерительной системы. (Федеральное агентство по атомной энергии. Общество с ограниченной ответственностью «Инженерно-сервисный центр диагностики оборудования АЭС НИКИЭТ» (ООО ИЦЦ НИКИЭТ), «Методика внутриреакторного контроля наличия и измерения величины телескопического соединения верхнего тракта топливных ячеек и ячеек СУЗ реакторов РБМК-1000 Ленинградской АЭС при использовании системы контроля СКК-1», 840.38 М, Москва, 2005 г.) Недостатком способа является то, что для проведения контроля требуется извлечение канала из реактора, что требует больших временных, трудовых и финансовых затрат, а кроме того, также требуется извлечение ТВС из канала и ее последующая загрузка обратно.
Оценку остаточного ресурса телескопических соединений трактов ядерного канального реактора определяют путем сравнения измеренных значений величин остаточного перекрытия каждого телескопического соединения с предельно допустимой величиной.
Ближайшим аналогом заявляемого технического решения является способ оценки остаточного ресурса телескопических соединений трактов топливных ячеек ядерного канального реактора (патент РФ №2380773), оценку остаточного ресурса телескопических соединений трактов топливных ячеек ядерного канального реактора осуществляют путем измерения величины остаточного перекрытия каждого телескопического соединения и сравнения с предельно допустимой величиной по результатам измерения расстояния от торца нижнего тракта каждого топливного канала до начала конусного перехода верхнего тракта канала. В качестве измерительного средства используют видеоробот, соединенный с блоком-преобразователем оптического сигнала, имеющим возможность перемещаться по кольцевому экрану бокового отражателя активной зоны реактора. Видеоробот, в период нахождения между рядами трактов, последовательно позиционируют на наружной поверхности трактов в верхней зоне телескопических соединений. Полученное изображение зоны наблюдения переносят на масштабирующий экран монитора и производят измерение на экране расстояния от торца нижнего тракта до начала конусного перехода верхнего тракта, а величины остаточных телескопических перекрытий каждого телескопического соединения трактов определяют по расчетной формуле. Оценку их остаточного ресурса определяют по известной зависимости.
Недостатком способа является трудоемкость проведения измерений на удаленных от видеоробота трактах, связанная с необходимостью ручной фокусировки на узкой видимой части каждого тракта и малым углом обзора в вертикальной и горизонтальной плоскости, что требует большой сосредоточенности и внимательности оператора, и, как следствие, возможность ошибок при определении номеров ячеек и более низкая точность определения ресурса телескопических соединений.
Задача, решаемая изобретением, заключается в снижении трудоемкости, сложности способа, в обеспечении повышения точности определения ресурса телескопических соединений.
Сущность данного технического решения заключается в том, что в способе оценки остаточного ресурса телескопических соединений трактов топливных ячеек ядерного канального реактора путем сравнения фактической величины перекрытия каждого телескопического соединения с предельно допустимой величиной по результатам измерения расстояния от торца нижнего тракта каждого топливного канала до начала конусного перехода соответствующего верхнего тракта посредством дистанционно управляемого видеоробота предложено измерения осуществлять видеороботом с магнитной подвеской, перемещающимся по нижней поверхности верхней металлоконструкции реактора между трактами технологических каналов, в момент нахождения его непосредственно у каждого телескопического соединения.
Принципиальным отличием предлагаемого способа от ближайшего аналога является то, что измерения удается проводить в непосредственной близости от измеряемого объекта, что обеспечивает хороший обзор объекта за счет повышения углов обзора в вертикальной и горизонтальной плоскости, высокое качество изображения объекта, передаваемого на преобразователь оптического сигнала, обеспечивается удобство и высокая производительность работы оператора, проводящего измерения. Обеспечивается требуемая точность при измерениях остаточного ресурса телескопических соединений трактов топливных ячеек ядерного канального реактора независимо от их места нахождения. Достигается снижение трудоемкости, сложности и повышение точности измерений, так как малогабаритный видеоробот подводится непосредственно к каждому измеряемому объекту, количество которых в одном реакторе - от 1630 до 1680 шт., для чего видеоробот имеет магнитную подвеску и передвигается по нижней поверхности верхней металлоконструкции реактора, между трактами, а измерение производит в момент нахождения на минимальной дистанции от измеряемого объекта. Для того чтобы приблизиться к измеряемым объектам-трактам, представляющим собой вертикальные составные трубы переменного диаметра, возможны в пределах заявляемого способа следующие виды перемещений:
а) по верхней поверхности сборок, составляющих тепловой экран вокруг активной зоны реактора, как это сделано в ближайшем аналоге предлагаемого устройства;
б) по верхней поверхности сборок, на которых стоят нижние тракты;
в) по боковым цилиндрическим поверхностям самих трактов;
г) по нижнему основанию верхней металлоконструкции реактора между технологических каналов.
В ближайшем аналоге возможно перемещение только по варианту а).
Вариант а) позволяет видеороботу приблизиться только к периферийным рядам трактов. Дальние ряды трактов приходится осматривать через промежутки между предыдущими рядами, что ухудшает обзор, затрудняет идентификацию трактов, требует от оператора предельной собранности и внимания. Измерение самых дальних рядов трактов производится на пределе разрешающей способности оптического оборудования с крайне узким сектором обзора объекта, что сказывается на точности измерений этих рядов. Таким образом, точность измерения остаточного ресурса телескопических соединений трактов оказывается разной. Вариант б) крайне затруднен тем, что перепад высот между соседними сборками может достигать 350 мм при том, что расстояние между трактами составляет всего 110 мм. Передвижение будет затрудняться также наличием на сборках крепежных болтов и гаек. Вариант в) возможен только при условии, что видеоробот сможет перемещаться с одного тракта на другой, преодолевая расстояние 110 мм между ними по воздуху. Вариант г) позволяет малогабаритному видеороботу приблизиться к каждому тракту по ровной нижней поверхности верхней металлоконструкции. Этот режим измерений является предпочтительным и обеспечивает одинаковую точность измерений. Применение магнитной подвески обусловлено материалом нижней поверхности верхней металлоконструкции - ферромагнитной сталью. Магнитная подвеска на постоянных магнитах не зависит от внешних источников энергии (например, электроэнергии, сжатого воздуха, вакуума, жидкости и пр.), а следовательно, гарантирует видеоробот от падения вниз в случае непредвиденного отключения подачи энергии. Использование дистанционного управления обусловлено высокими полями ионизирующего излучения в зоне контроля из-за расположения измеряемых объектов вблизи активной зоны ядерного реактора и невозможности использования биологической защиты в пространстве между трактами, расстояние между которыми составляет 110 мм. По этой же причине необходим преобразователь оптического сигнала. Перемещение видеоробота между трактами позволяет производить измерение расстояния от торца нижнего тракта до начала конусного перехода верхнего тракта телескопического соединения с минимальной дистанции с любой стороны тракта, что обеспечивает наибольшую достоверность результатов измерений, наилучшую идентификацию измеряемых трактов и возможность контроля всех трактов активной зоны.
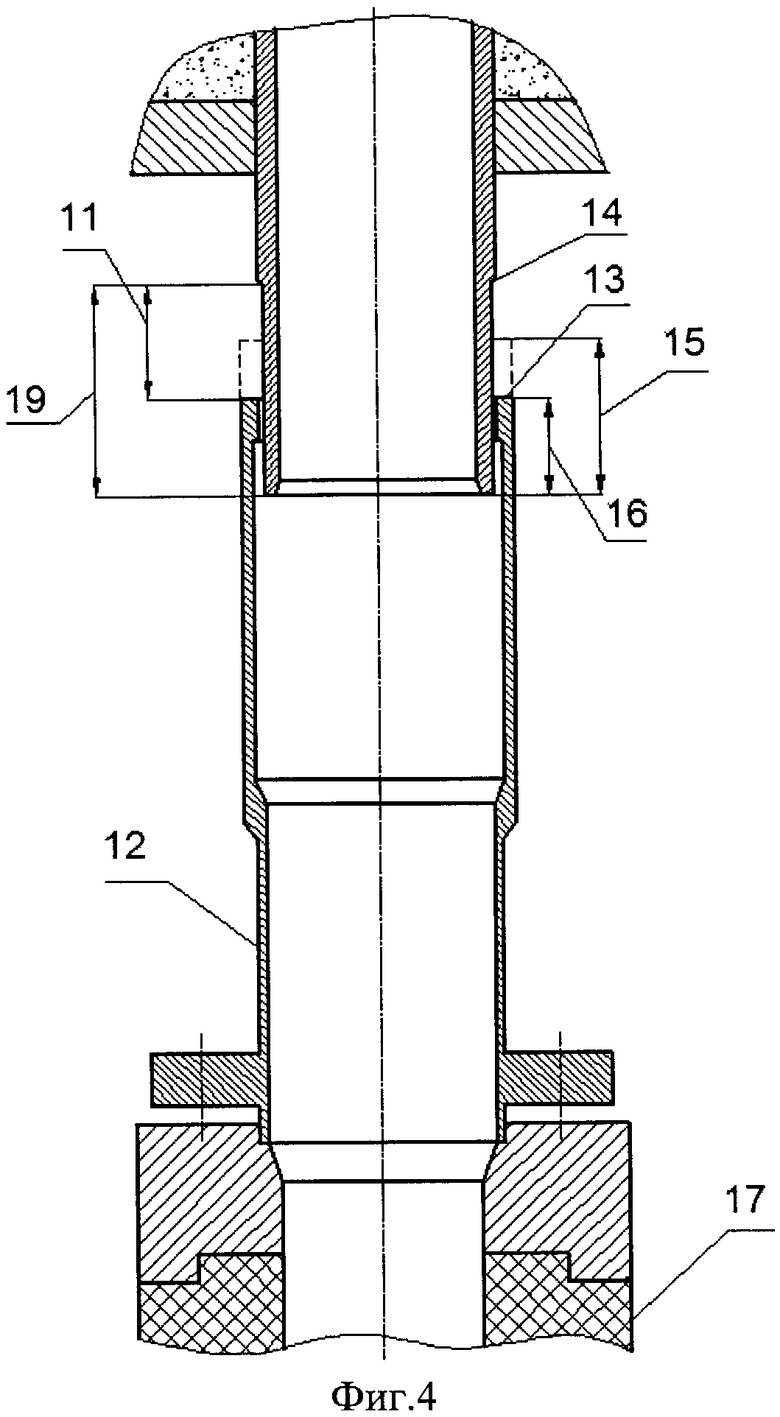
Заявленный способ проиллюстрирован на фиг.1, 2, 3, 4. На фиг.1 представлена общая схема проведения измерений, на фиг.2, 3 представлен видеоробот в рабочем положении около измеряемого объекта, на фиг.4 - измеряемый объект - телескопическое соединение трактов.
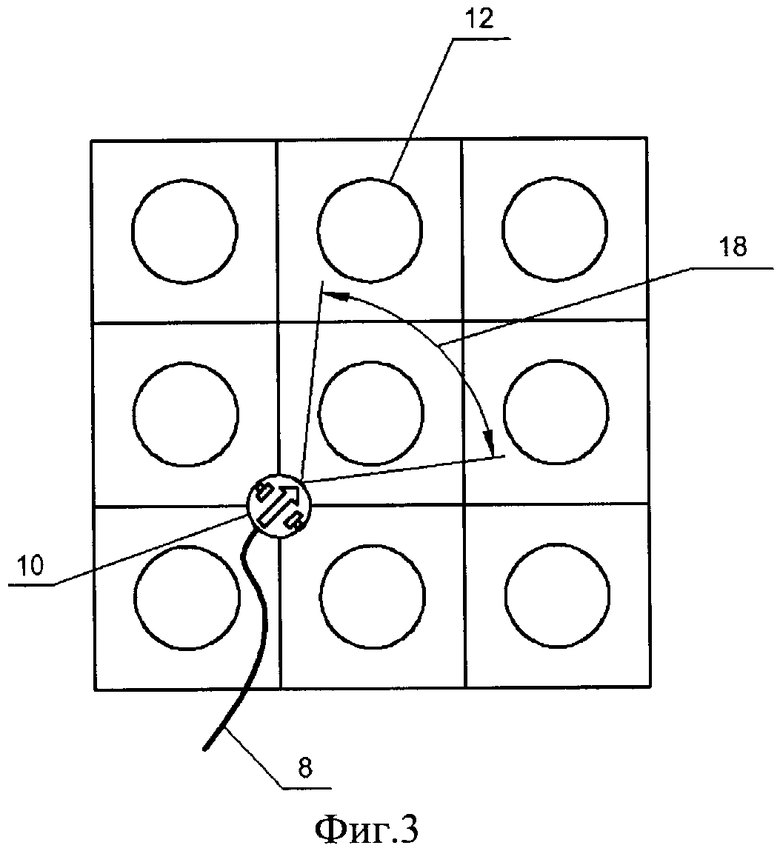
В процессе эксплуатации ядерного уран-графитового реактора в результате радиационно-термических воздействий происходит объемная радиационная усадка графита, которая приводит к значительному сокращению геометрических размеров графитовых блоков и графитовых колонн, в частности высота графитовых колонн может уменьшиться на 250÷270 мм за 45 лет эксплуатации. Это приводит к тому, что размер 15 (фиг.3, 4), изначально равный 225 мм, из-за усадки графитовой колонны 17 и опускания связанного с ней нижнего тракта 12, уменьшается до величины 16 и менее и может уменьшиться до полной расстыковки тракта. Расстыковка трактов совершенно недопустима по условиям эксплуатации реактора, поэтому необходимо своевременно произвести ремонт путем вставки между графитовой колонной 17 и нижним трактом 12 специальной проставки, увеличивающей размер 16 до величины, достаточной для выработки реактором запланированного ресурса 45 лет. Из-за разброса изначальных свойств графита и неравномерности воздействия эксплуатационных факторов графитовые колонны усаживаются с различной скоростью, поэтому остаточный ресурс у различных колонн может значительно отличаться. Для обеспечения безопасной эксплуатации реактора, эффективного использования остаточного ресурса, обеспечения планов по генерации электроэнергии необходимо точно определить величину остаточного ресурса зацепления трактов для формирования графика ремонтов. Угол обзора телекамер видеоробота в вертикальной плоскости 20 и горизонтальной плоскости 18 достаточен для полного обзора контролируемой зоны измеряемого объекта.
Остаточная величина перекрытия телескопического соединения (размер 16) определяется по следующей формуле:

где:
А - остаточная величина перекрытия, размер 16, мм;
G - измеренный видеороботом размер 11, мм;
340 - размер 19, величина которого не изменяется в процессе эксплуатации реактора, мм.
Остаточный ресурс телескопического соединения определяется исходя из рассчитанного по формуле (1) размера 16:

где:
Р - остаточный ресурс, лет;
А - рассчитанное по формуле (1) значение размера фактическое 16, мм;
V - скорость усадки графитовой колонны, мм/год;
Amin - предельно допустимая величина размера 11, в настоящее время принята 15 мм.
Таким образом оценку ресурса проводят путем сравнения величины фактического перекрытия с предельно допустимой величиной Amin.
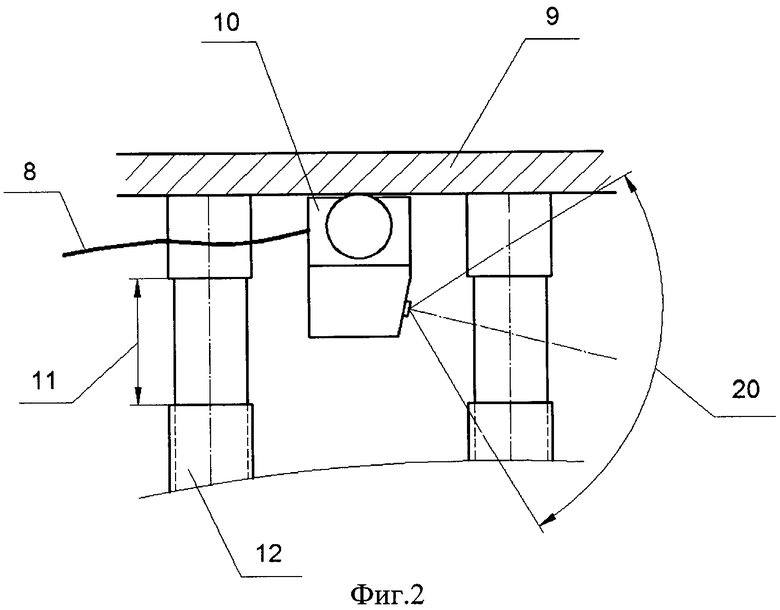
Видеоробот 10 (фиг.1, 2) передвигается по нижнему основанию верхней металлоконструкции 9 между трактами 12. Измеряемой величиной является размер 11 - расстояния от торца нижнего тракта 13 до начала конусного перехода верхнего тракта 14. Управление видеороботом и получение изображений трактов осуществляется с помощью блока-преобразователя оптического сигнала с пультом управления 1, располагающегося на полу 4 центрального зала реактора над верхней биозащитой. Доставка видеоробота в рабочее пространство осуществляется через вертикальную шахту парогазового сброса 6 посредством штанги 5, внутри которой проходит кабель связи 8 видеоробота с пультом управления и преобразователем оптического сигнала. Штанга подается в шахту подъемным краном центрального зала реактора, для чего имеет строповочный рым 2. Для подачи и подмотки кабеля связи на штанге установлен подмоточный барабан 3. Благодаря небольшим размерам видеоробота для его подачи в рабочее пространство не требуется демонтировать пробку-рассекатель 7, видеоробот подается в ее боковые проемы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ ОСТАТОЧНОГО РЕСУРСА ТЕЛЕСКОПИЧЕСКИХ СОЕДИНЕНИЙ ТРАКТОВ ТОПЛИВНЫХ ЯЧЕЕК ЯДЕРНОГО КАНАЛЬНОГО РЕАКТОРА | 2008 |
|
RU2380773C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ ТЕЛЕСКОПИЧЕСКИХ СОЕДИНЕНИЙ ТРАКТОВ ТОПЛИВНЫХ ЯЧЕЕК ЯДЕРНОГО УРАН-ГРАФИТОВОГО РЕАКТОРА | 2008 |
|
RU2375770C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ ТОПЛИВНОЙ ЯЧЕЙКИ ЯДЕРНОГО РЕАКТОРА | 2005 |
|
RU2302671C1 |
| СПОСОБ КОНТРОЛЯ ВЕЛИЧИНЫ ПЕРЕКРЫТИЯ ТЕЛЕСКОПИЧЕСКОГО СОЕДИНЕНИЯ ВЕРХНЕГО ТРАКТА С ФЛАНЦЕМ ГРАФИТОВОЙ КОЛОННЫ КАНАЛЬНОГО ЯДЕРНОГО РЕАКТОРА | 2000 |
|
RU2184996C1 |
| ТРАКТ ТЕХНОЛОГИЧЕСКОГО КАНАЛА ЯДЕРНОГО УРАН-ГРАФИТОВОГО РЕАКТОРА | 2011 |
|
RU2449390C1 |
| СПОСОБ ПРОДЛЕНИЯ РЕСУРСА ГРАФИТОВОГО ЯДЕРНОГО КАНАЛЬНОГО РЕАКТОРА | 2012 |
|
RU2501105C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ ЗАЦЕПЛЕНИЯ ТЕЛЕСКОПИЧЕСКОГО СОЕДИНЕНИЯ ВЕРХНЕГО ТРАКТА С ФЛАНЦЕМ ГРАФИТОВОЙ КОЛОННЫ КАНАЛЬНОГО ЯДЕРНОГО РЕАКТОРА | 2004 |
|
RU2273899C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕСУРСНЫХ ХАРАКТЕРИСТИК ТОПЛИВНЫХ ЯЧЕЕК АКТИВНОЙ ЗОНЫ УРАН-ГРАФИТОВОГО КАНАЛЬНОГО ЭНЕРГЕТИЧЕСКОГО РЕАКТОРА | 2013 |
|
RU2556889C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ ПЕРЕКРЫТИЯ ТЕЛЕСКОПИЧЕСКОГО СОЕДИНЕНИЯ ВЕРХНЕГО ТРАКТА С ФЛАНЦЕМ ГРАФИТОВОЙ КОЛОННЫ КАНАЛЬНОГО ЯДЕРНОГО РЕАКТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2400839C1 |
| Активная зона ядерного реактора с твердым замедлителем | 1988 |
|
SU1597935A1 |
Изобретение относится к технике эксплуатации ядерных канальных реакторов, касается, в частности, способов оценки остаточного ресурса телескопических соединений трактов и может быть использовано для контроля за состоянием телескопических соединений трактов в период проведения ремонта. Способ оценки остаточного ресурса телескопических соединений трактов топливных ячеек ядерного канального реактора заключается в сравнении фактической величины перекрытия каждого телескопического соединения с предельно допустимой величиной по результатам измерения расстояния от торца нижнего тракта каждого топливного канала до начала конусного перехода соответствующего верхнего тракта посредством дистанционно управляемого видеоробота. Измерения осуществляются видеороботом с магнитной подвеской. Видеоробот перемещается по нижней поверхности верхней металлоконструкции реактора между трактами технологических каналов, в момент нахождения его непосредственно у каждого телескопического соединения. Изобретение направлено на снижении трудоемкости, сложности способа, на обеспечение повышения точности определения ресурса телескопических соединений. 4 ил.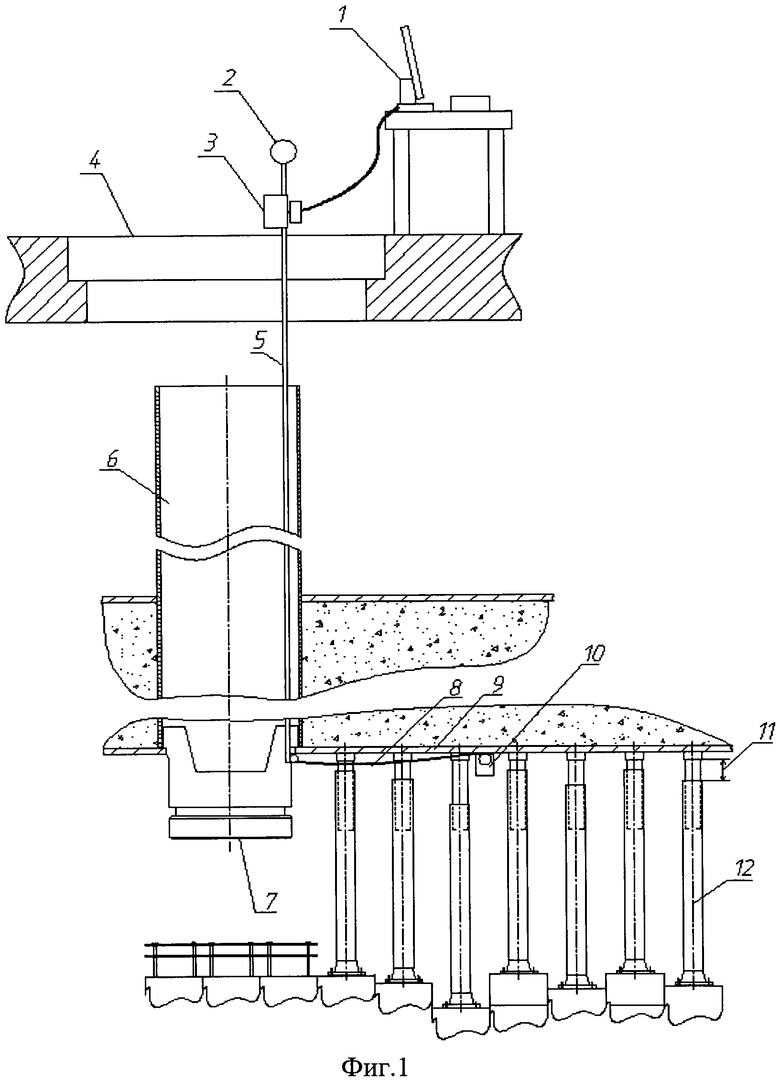
Способ оценки остаточного ресурса телескопических соединений трактов топливных ячеек ядерного канального реактора путем сравнения фактической величины перекрытия каждого телескопического соединения с предельно допустимой величиной по результатам измерения расстояния от торца нижнего тракта каждого топливного канала до начала конусного перехода соответствующего верхнего тракта посредством дистанционно управляемого видеоробота, отличающийся тем, что измерения осуществляют видеороботом с магнитной подвеской, перемещающимся по нижней поверхности верхней металлоконструкции реактора между трактами технологических каналов, в момент нахождения его непосредственно у каждого телескопического соединения.
| СПОСОБ ОЦЕНКИ ОСТАТОЧНОГО РЕСУРСА ТЕЛЕСКОПИЧЕСКИХ СОЕДИНЕНИЙ ТРАКТОВ ТОПЛИВНЫХ ЯЧЕЕК ЯДЕРНОГО КАНАЛЬНОГО РЕАКТОРА | 2008 |
|
RU2380773C1 |
| СИСТЕМА УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНОГО КАНАЛЬНОГО РЕАКТОРА | 1992 |
|
RU2046407C1 |
| СПОСОБ ДИАГНОСТИКИ ПАРАМЕТРОВ ТЕХНОЛОГИЧЕСКИХ КАНАЛОВ ЯДЕРНЫХ РЕАКТОРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2149467C1 |
| СПОСОБ СУШКИ КАПИЛЛЯРНО-ПОРИСТЫХ МАТЕРИАЛОВ | 2005 |
|
RU2287750C1 |
| ОБЪЕМНАЯ РАДИОЧАСТОТНАЯ КАТУШКА С УЛУЧШЕННЫМ ПРОСТРАНСТВОМ И ДОСТУПОМ ДЛЯ ИСПОЛЬЗОВАНИЯ В СИСТЕМЕ МАГНИТНО-РЕЗОНАНСНЫХ ИССЛЕДОВАНИЙ | 2016 |
|
RU2701785C2 |

