Изобретение относится к сельскому хозяйству и обеспечивает совокупный агроэкотехнический результат эффективного управления технологией производства агропродукции в нескольких территориально распределенных зонах, адаптацию переменной структуры объектов технологии производства с подвижными объектами из различных зон производства или окружающей природной среды, снижение негативных действий на урожай и качество производства агропродукции. Может найти применение во всех регионах производства агропродукции, при комплексной автоматизации контроля качества и управления технологическими процессами возделывания, хранения и реализации агропродукции, преимущественно растениеводческой, в местах производства и потребления, в селекционных и семеноводческих системах воспроизводства агропродукции.
Известны разнообразные технологии производства агропродукции, содержащие комплекс технических средств возделывания, хранения и реализации (см., например, Н.И.Верещагин, К.А.Пшеченков. «Комплексная механизация возделывания, уборки и хранения картофеля». - М.: Колос, 1977, 352 с.). Недостатком этих технологий является отсутствие постоянного мониторинга и непрерывного управления качеством производства продукции.
Известны способы и устройства управления качеством агропродукции, содержащие ряд технологических процессов подготовки агропродукции, электронно-оптический контроль агропродукции, автоматическую сортировку агропродукции по качеству (см., например, Башилов A.M. «Электронно-оптическое зрение в аграрном производстве». - Москва: ВИЭСХ, 2005, 267 с.). Недостатком этих способов является отсутствие регулирования непрерывностью производства агропродукции, нерегулярно и неполно ведется анализ изменений качества агропродукции по морфологическим признакам при воздействии техногенных и природных факторов, нет оперативного реагирования на ухудшение условий производства, на ликвидацию последствий, на восстановление нормального состояния производства.
Из известных способов наиболее близкими по технической сущности к предлагаемому изобретению является «Способ регулирования производства агропродукции» (патент на изобретение №2265989, бюллетень изобретений №35 от 20.12.2005). Способ регулирования производства агропродукции, включающий определение морфологических признаков агропродукции, в зависимости от которых осуществляют регулирование производства, причем определение морфологических признаков объектов аграрного производства осуществляют в полном объеме постоянно сразу в нескольких зонах производства, а регулирование производства агропродукции для каждой зоны производства индивидуально непрерывно в любой момент времени при обнаружении, отклонений морфологических параметров воздействиями техногенного и природного характера.
Недостатком этого изобретения является ограниченные функциональные возможности электронно-оптического способа регулирования рассредоточенного в пространстве производства агропродукции, размещенного в нескольких территориально распределенных зонах с индивидуальным непрерывным контролем и регулированием производства в каждой зоне. При межзональном взаимодействии осуществляется обмен подвижными объектами различных технологий производства агропродукции. В пространстве между зонами производства случайно или преднамеренно могут оказаться подвижные объекты (техника, люди, животные, насекомые, предметы, осадки и т.д.), причастные и непричастные к производству агропродукции или влияющие на ее качество. При несвоевременном и неправильном определении поведения подвижных объектов аграрного производства, находящихся между рабочими зонами производства агропродукции, могут возникать значительные ущербы (потери урожая, эпидемии, потравы, хищения) от проникновения вредоносных объектов в рабочие агротехнологические зоны производства. В рассматриваемом прототипе отсутствует регулирование поведения подвижных объектов, способных проникать в зоны непосредственного возделывания или хранения агропродукции (в поле или теплице). Такое регулирование, из-за возможной вредоностности, необходимо осуществлять путем разрешения движения объектов в зоны производства при соответствии определяемых признаков подвижных объектов границам зон производства и фазам роста (развития) растений, включения их в соответствующий агротехнологический процесс возделывания агрокультуры и изменения операций по уходу за растениями.
Задачей изобретения является расширение функциональных возможностей регулирования технологии производства агропродукции за счет создания избирательного регулирования поведения подвижных объектов, влияющих на качество и урожайность возделываемой агрокультуры, которое осуществляют после определения и сопоставления динамических и морфологических признаков подвижных объектов с динамическими параметрами роста (развития) растений и границами зон производства.
В результате использования предлагаемого изобретения повышаются общесистемный оптимизационный эффект и качество регулирования технологии производства агропродукции. При введении предлагаемого способа регулирования возрастает качество производства агропродукции за счет пропускания в нужное время объектов, положительно влияющих на технологию производства агропродукции и исключения возможности попадания негативных объектов, наносящих ущерб. Своевременное, опережающее принятие правильного решения до встречи подвижного объекта с границей зоны производства и посевом возделываемой агрокультуры исключает появление агротехнологических ошибок, создающих чрезвычайные ситуации.
Вышеуказанный технический результат достигается тем, что предлагается новый способ регулирования технологии производства агропродукции включающий: определение параметров роста (развития) растений в рабочих зонах по динамике морфологических признаков, регистрируемых электронно-оптическими средствами на листовой поверхности; определение электронно-оптическими средствами динамических и морфологических признаков подвижных объектов, находящихся между рабочими зонами производства агропродукции; и регулирование их поведения путем разрешения движения объектов в зоны производства при соответствии определяемых признаков подвижных объектов границам зон производства и фазам роста (развития) растений, включения их в соответствующий агротехнологический процесс возделывания агрокультуры и изменения операций (режимов, параметров) по уходу за растениями.
Сущность изобретения поясняется чертежами. На фиг.1 изображена схема реализации электронно-оптического способа регулирования технологии производства продукции. На фиг.2 изображена схема реализации электронно-оптического способа при определении динамических и морфологических признаков подвижных объектов. На фиг.3 изображена схема реализации способа при определении индивидуальных идентификационных морфологических параметров границ зон производства. На фиг.4 изображена схема реализации способа при определении динамических параметров подвижных объектов. На фиг.5 изображена схема отображения морфологических и динамических признаков на фотоматрице электронно-оптического средства наблюдения. На фиг.6 изображена блок-схема преобразования исходной оптической информации в цифровую. На фиг.7 изображен блок предварительной обработки цифровых видеоизображений. На фиг.8 изображена обобщенная блок-схема реализации способа регулирования технологии производства агропродукции. На фиг.9 изображена схема информационно-управляющей структуры технологии регулирования производства агропродукции.
Способ регулирования производства агропродукции, кроме исполнения технологических процессов возделывания, хранения и обработки агропродукции, определения морфологических признаков объектов аграрного производства внутри нескольких рабочих зон и регулирования производства агропродукции для каждой зоны производства индивидуально и непрерывно при обнаружении отклонений морфологических параметров воздействиями техногенного и природного характера, предусматривает дополнительно осуществлять функцию регулирования технологии производства агропродукции, которую необходимо выполнять после определения морфологических и динамических признаков подвижных объектов, обнаруженных в пространстве между зонами производства агропродукции, путем разрешения или запрещения доступа этих объектов в зоны производства, в зависимости от соответствия регистрируемых признаков подвижных объектов индивидуальным идентификационным входам (границам) зон производства и фазам роста (развития) растений в посадках, включения их в соответствующий агротехнологический процесс возделывания агрокультуры и изменения операций (режимов, параметров) по уходу за растениями.
Структурная схема реализации способа регулирования технологии производства агропродукции приведена на фиг.1. На ней показано: зоны аграрного производства 1; границы зон аграрного производства 2; растения (объекты) в зонах посадки и реализации технологии аграрного производства 3; траектория движения подвижных объектов 4; подвижные объекты 5; пространство осмотра и перемещения подвижных объектов 6; электронно-оптическое средство наблюдения морфологических и динамических признаков растений и подвижных объектов 7; пределы границ наблюдения морфологических и динамических признаков объектов производства 8; направление наблюдения 9; блок формирования и передачи команд управления 10; средства приема и исполнения команд управления подвижными объектами 11.
Для выполнения процесса наблюдения подвижных объектов формируют единый информационно-аналитический центр, например видеонаблюдения, обозначенный на схеме электронно-оптическим средством 7, в котором дистанционно осуществляют мониторинг роста и развития растений 3 в зоне реализации технологии производства агропродукции 1, их границы 2 (периметр) и межзональное пространство 6 свободного перемещения подвижных объектов 5. Организация процесса наблюдения может осуществляться по различным схемам: с помощью высотного вертикального видеонаблюдения (фиг.1), например телескопических башен, привязных аэростатов; с помощью горизонтального панорамного видеонаблюдения, например видеокамер кругового, сферного или полусферного наблюдения; с помощью углового видеонаблюдения, например сканирующего обзора «сверху-вниз» или «снизу-вверх» с высотных зданий агропроизводственных объектов.
На фиг.2 приведена схема регистрации морфологических и динамических признаков подвижных объектов: местоположение исходной точки траектории движения 12; точка вхождения подвижного объекта в пределы зон наблюдения 13; место изменения траектории движения 14; место вхождения объекта в зону производства 15; изменение траектории движения в сторону от зоны производства 16.
Наличие подвижных объектов в межзональном пространстве обусловлено производственными, инновационными или случайными причинами их появления. Наиболее предопределенными являются передвижения производственных объектов, идентифицированных на основе морфологических и динамических признаков, учитывающих, например форму, геометрические размеры, окраску, траекторию и скорость движения. Инновационные объекты, прошедшие предварительную идентификацию по морфологическим признакам, регулируются по специальным программам допуска после оценки их совместимости с рабочими зонами и биофизиологическими фазами (всходы, стеблеобразование, цветение, накопление урожая, созревание, увядание) развития растений в посадках. Случайные подвижные объекты, как правило, окружающей природной среды (насекомые, птицы, животные, прохожие, дождь, снегопад, листопад и др.) необходимо идентифицировать не только по морфологическим, но и по динамическим признакам, или по отношениям динамических и морфологических признаков (скорость перемещения, отношение скорости перемещения к размеру, плотность и направление движения объектов). Подвижный объект, попадая в пределы зоны наблюдения из точки 12, обнаруживается электронно-оптическим средством 7 в точке вхождения 13, с последующей фиксацией в точках 14, 15 и других точках местоположения, например, при движении в рабочей зоне. В соответствии с сигналом идентификации подвижный объект изменяет траекторию своего движения по маршруту 15 или 16, получая допуск на вход через границу рабочей зоны производства агропродукции, с помощью технического средства 11 приема и исполнения команд управления подвижными объектами. В качестве средств исполнения команд управления используются световые, звуковые или механические устройства. Подвижный объект, например машинно-тракторный агрегат, получивший разрешение на работу, получает команды на выполнение агротехнологических операций, соответствующих фазе роста (развития) растений. При этом в зависимости от интенсивности роста и развития растений (густоты растений в междурядьях) регулируется число проходов агрегата по полю или режимы (параметры) рабочих механизмов (скорость, ширина захвата, глубина обработки и т.д.).
На фиг.3 изображена схема реализации способа при определении индивидуальных идентификационных морфологических параметров зон реализации технологии производства агропродукции. На фиг.3 приведены: морфологический признак рабочей зоны «топологическое расстояние до индивидуальной зоны производства» 17; морфологический признак рабочей зоны «угол пространственного расположения индивидуальной зоны производства» 18; место базовой точки отсчета (начало координат) 19.
Индивидуальный идентификационный признак (код) рабочей зоны определяется по морфологическим параметрам неподвижных объектов, включенных в агротехнологические процессы производства агропродукции, и видоизменяется (перекодируется) при изменении морфологической структуры неподвижных объектов рабочей зоны, например при вхождении подвижного объекта в рабочую зону и включения его в существующую морфологическую структуру или при удалении неподвижного объекта из рабочей зоны. Морфологические параметры рабочей зоны определяются по морфологическому признаку 17 «топологическое расстояние до индивидуальной зоны производства» и морфологическому признаку «угол пространственного расположения индивидуальной зоны производства», метрологически фиксируемого от места базовой точки отсчета 19. Индивидуальные идентификационные признаки объектов рабочих зон фиксируются аналогичным образом, в качестве места базовой точки отсчета может использоваться точка 19, расположенная в межзональном пространстве или установленная внутри рабочей зоны или в центре поля зрения (фотоматрицы) видеоцифровой камеры, включенной в схему обзора электронно-оптического средства 7.
На фиг.4 изображена схема реализации способа при определении динамических параметров подвижных объектов. На фиг.4 изображено: изменение угла пространственного расположения подвижного объекта Δφ, изменение времени движения подвижного объекта Δt.
Идентификационные признаки подвижных объектов определяются по его морфологическим и динамическим параметрам путем определения соотношения их между собой, например маленький объект и большая скорость или большой объект и маленькая скорость; форма объекта и траектория движения; цвет объекта, размер и направление, скорость движения; плотность (численность) объектов движения и синхронность движения. Изменение угла Δφ пространственного расположения и времени Δt движения подвижного объекта, при больших дистанциях перемещения определяется по наличию его в зоне обзора той или иной пространственно ориентированной видеокамеры, фиксирующей текущее значение времени. При малых дистанциях перемещения, аналогичным образом, эти изменения фиксируются с фотоматрицы видеоцифровой камеры наблюдения.
На фиг.5 показана схема отображения морфологических и динамических признаков на фотоматрице электронно-оптического средства наблюдения. На фиг.5 показаны: фотоматрица 20, пространственно детерминированная решетка пикселей фотоматрицы 21, зона обзора объектов аграрного производства 22.
Объекты (растения в посадках) рабочих зон аграрного производства, их границы, подвижные объекты с помощью электронно-оптических средств наблюдения 7, установленных в соответствии с реализуемыми технологическими процессами (возделывания, хранения и обработки агропродукции), отображаются на фотоматрицах 20 видеоцифровых камер. В соответствии с законами геометрической оптики морфологические и динамические признаки объектов аграрного производства отображаются на пространственно ориентированную решетку пикселей 21 фотоматрицы 20, с сохранением геометрических пропорций и соотношений. Это дает возможность использовать разнообразные компьютерные программы анализа и обработки видеоцифровых изображений, поступающих от электронно-оптических средств 7 наблюдения.
На фиг.6, более подробно, представлена схема технической реализации способа регулирования осуществляемого электронно-оптическим средством при получении исходных данных. На фиг.6 изображены: источник света или инфракрасной подсветки 22; блок аналогово-цифрового преобразования видеоизображений 23; компьютер 24; пространственное распределение морфологических и динамических признаков объектов аграрного производства f(x,y); пространственное распределение морфологических и динамических признаков объектов аграрного производства на видеоцифровом изображении g(x,y); пространственное распределение пикселей, измеряющих морфологические и динамические признаки объектов аграрного производства gij(n).
Для получения качественных исходных данных о наблюдаемых объектах предусматривается дополнительное освещение (источника 22) слабоконтрастных зон наблюдения и использование инфракрасной подсветки в ночное время суток. Отраженное оптическое поле f(x,y), в пределах границ 8 наблюдения морфологических и динамических признаков объектов зонального производства воспринимается через оптическую систему электронно-оптического средства 7 и проецируется g(x,y) на фотоматрицу 20 для последующего аналогово-цифрового преобразования в блоке 23 и передачи gij(n) в компьютер 24 для предварительной обработки и анализа видеоцифрового изображения.
На фиг.7, более подробно, представлена последовательность операций предварительной обработки видеоцифровых изображений, осуществляемых электронно-оптическим средством при реализации способа регулирования. На фиг.7 изображены: электронное средство импорта изображения в программу компьютера 25; программный оператор выделения фрагмента изображения 26; программный оператор нелинейной фильтрации морфологических и динамических признаков по максимальному значению 27; программный оператор нелинейной фильтрации морфологических и динамических признаков по минимальному значению 28; программный оператор разделения информации по параллельным каналам 29; программный оператор улучшения качества отображения информативного признака 30; программный оператор сегментации информативных фрагментов по яркости и цветовой окраске 31; программный оператор масштабирования и разметки морфологических и динамических признаков 32; программный оператор установления корреляционной и логистической связи морфологических и динамических признаков 33; программный оператор экспорта данных в программу анализа и принятия управляющих решений 34.
Видеоцифровое изображение переданное в компьютер через интерфейс связи импортируется в программу предварительной обработки видеоцифрового изображения с целью получения достоверной информации по основным морфологическим и динамическим признакам подвижных объектов и растений в посадках. Видеоцифровое изображение, проходя ряд автоматических операторов 25-33 подвергается алгоритмическим преобразованиям: расчленяется на пространственно локализованные фрагменты в операторах 26-28 по соответствующим идентифицируемым признакам, распараллеливается в операторе 29, улучшается в операторе 30 (путем повышения контрастности, изменения яркости, устранения помех), сегментируется по окраске в операторе 31, размечается и масштабируется в операторе 32, в соответствии с заданием в операторе 33 производится анализ взаимосвязанности информативных признаков с количественными параметрами и идентифицируемыми объектами. В таблице 1 приведена матрица связанности морфологических и динамических признаков, и параметров с идентифицируемыми подвижными объектами, обнаруживаемыми в пространстве зонального производства агропродукции, например, в зонах, возделывания, хранения и реализации картофеля.
Информация с результатами распознавания подвижных объектов в дальнейшем автоматически экспортируется программным оператором 34 в программу заключительного анализа и последующего принятия управляющих решений относительно поведения подвижных объектов. Принимается один из четырех вариантов: 1 - да, 2 - нет, 3 - и да и нет (нечетко определен), 4 - ни да, ни нет (что-то другое). Каждому варианту решения соответствует физическое или информационное воздействие, содействующее или предотвращающее перемещение подвижного объекта, включающее его в агротехнологический процесс и изменяющее операции по уходу за растениями.
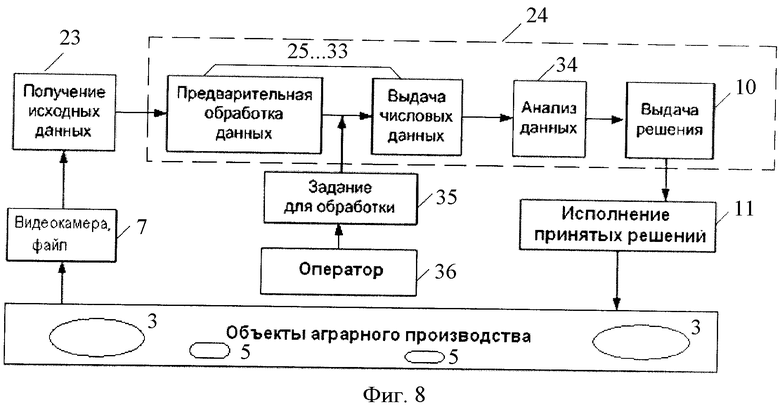
На фиг.8 изображена обобщенная блок-схема реализации электронно-оптического способа регулирования технологии производства агропродукции. На фиг.8 изображено: программный оператор корректировки задания на обработку и анализ данных 35; системный администратор 36.
Электронно-оптический способ регулирования технологии производства агропродукции является универсальным и может быть применим как для производства продукции растениеводства, так и животноводства. Для расширения функциональных возможностей в технологии регулирования предусмотрено рабочее место оператора управления, системного администратора 36, обеспечивающего автоматизированную корректировку задания на обработку и анализ данных с помощью программного оператора 35.
На фиг.9 изображена схема информационно-управляющей структуры процесса регулирования технологии производства агропродукции. Информационно-управляющая структура может организовываться по проводной, беспроводной или смешанной схемам обмена информацией, с использованием как стационарных, так и мобильных вариантов установки электронно-оптических средств наблюдения.
Для выполнения предлагаемого способа регулирования технологии производства агропродукции (например, картофеля), осуществляют территориально разделенное производство на рабочие зоны (возделывание, хранение, реализация), в которых устанавливается одновременное видеонаблюдение за растениями в посадках, стационарными и подвижными объектами. Состояние объектов оценивают по результатам определения динамических параметров морфологических признаков (форма, размер, текстура, окраска), при отклонении которых от нормы, в результате воздействий техногенного или природного характера, осуществляют регулирование агротехнологии путем оптимизации их параметров и режимов работы машинно-тракторных агрегатов или операторов аграрного производства. Для автоматизации процесса регулирования поведения подвижных объектов, появляющихся случайно (птицы, насекомые, животные, человек и т.д.) или детерминировано (рабочий, трактор, автомобиль, агрегат и т.д.) и перемещающихся в пространстве между рабочими зонами, устанавливают дополнительное видеонаблюдение в границах возможного появления подвижных объектов. При вхождении подвижного объекта в объединенную зону обзора, кроме параметров морфологических признаков, осуществляют определение параметров динамических признаков (направление и траектория движения, скорость движения, остановки, ускорение и замедление). Определение параметров динамических признаков осуществляют с помощью процедур обработки и анализа видеоизображений, регистрируемых фотоматрицами электронно-оптических средств искусственного зрения. Обнаруженные подвижные объекты с помощью компьютерных вычислительных процедур распознаются и идентифицируются по индивидуальным входам или границам рабочих зон производства картофеля (например: селекционного, семенного и продовольственного) с учетом возможности взаимодействия с растениями в сортовой посадке, делянке, питомнике размножения, изоляторе. Движение подвижных объектов в зоны реализации технологии производства агропродукции регулируют в зависимости от соотношения параметров определяемых признаков подвижных объектов индивидуальным входам или границам зон производства и динамическим параметрам роста (развития) растений, путем разрешения движения объектов в зоны реализации технологии производства агропродукции, включения их в соответствующий агротехнологический процесс возделывания агрокультуры и изменения операций по уходу за растениями.
Запрет или разрешение допуска осуществляют с помощью автоматических турникетов, ворот, задвижек, сеток, звуковых или световых сигналов, лазерных или тепловых пушек. Включение в агротехнологический процесс определяется заданием временного интервала работы, количеством проходов, используемым агрегатом. Изменение операций осуществляют путем установки соответствующих рабочих органов и их положения относительно растений в посадках.
Приведенный пример показывает основные виды информационно-управляющих процедур регулирования технологии производства агропродукции с применением электронно-оптических средств искусственного зрения, однако он может быть расширен с привлечением других технических средств дистанционного контроля и управления сельскохозяйственными объектами на основе акустики, тепловидения и телемеханики.
Таким образом, применение электронно-оптического способа регулирования технологии производства агропродукции на основе видеоцифрового мониторинга роста (развития) растений и управления подвижными объектами природной среды и объектами агротехнологий позволит осуществить взаимообмен информационными потоками в территориально распределенных зонах возделывания, хранения и реализации агропродукции, улучшить наблюдение за подвижными объектами, своевременно определять их принадлежность и отношение к интегрированному производству, исключить негативное агрессивное действие вредоносных объектов, сократить ущербы, повысить культуру производства, что в целом даст возможность повысить урожайность, сохранность, безотходность и качество агропродукции. То есть получить наибольшую прибыль от аграрного производства при максимальной удовлетворенности потребителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДСТВА АГРОПРОДУКЦИИ | 2003 |
|
RU2265989C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВОЗОБНОВЛЯЕМОГО ПРОИЗВОДСТВА АГРОПРОДУКЦИИ | 2008 |
|
RU2377764C2 |
| УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНЫХ АГРЕГАТОВ ПРИ ВОЗДЕЛЫВАНИИ АГРОКУЛЬТУР | 2010 |
|
RU2471338C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТЕРРИТОРИАЛЬНО РАСПРЕДЕЛЕННОГО МНОГООТРАСЛЕВОГО ПРОИЗВОДСТВА АГРОПРОДУКЦИИ | 2010 |
|
RU2444177C2 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССАМИ ВОЗДЕЛЫВАНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 2012 |
|
RU2538997C2 |
| Способ и устройство возделывания агрокультур по управляемым зонам | 2015 |
|
RU2617340C2 |
| СПОСОБ И УСТРОЙСТВО РЕАЛИЗАЦИИ МОСТОВЫХ АГРОТЕХНОЛОГИЙ | 2009 |
|
RU2432727C2 |
| Устройство позиционирования мобильных агрегатов при возделывании агрокультур | 2019 |
|
RU2710163C1 |
| Устройство и способ беспилотной авиатехнологии управления агрообъектами в экосистемах | 2018 |
|
RU2704142C1 |
| Способ и устройство дистанционной фиксации физиологического состояния вымени и доильных сосков сельскохозяйственных животных | 2018 |
|
RU2677136C1 |







Изобретение относится к области сельского хозяйства. Электронно-оптический способ включает определение морфологических признаков объектов аграрного производства одновременно в нескольких зонах производства и их индивидуальное и непрерывное регулирование в каждой зоне производства при обнаружении отклонений морфологических параметров. Дополнительно определяют динамические параметры роста (развития) растений в зонах производства по морфологическим признакам листовой поверхности, динамические и морфологические признаки подвижных объектов, находящихся между зонами производства агропродукции. Затем регулируют их поведение путем разрешения движения объектов в зоны производства при соответствии определяемых признаков подвижных объектов границам зон производства и фазам роста (развития) растений, включения их в соответствующий агротехнологический процесс возделывания агрокультуры и изменения операций по уходу за растениями. Способ позволяет повысить качество регулирования технологии производства агропродукции. 9 ил.
Электронно-оптический способ регулирования технологии производства агропродукции, включающий определение морфологических признаков объектов аграрного производства одновременно в нескольких зонах производства и их индивидуальное и непрерывное регулирование в каждой зоне производства при обнаружении отклонений морфологических параметров, отличающийся тем, что дополнительно определяют динамические параметры роста (развития) растений в зонах производства по морфологическим признакам листовой поверхности, динамические и морфологические признаки подвижных объектов, находящихся между зонами производства агропродукции, и регулируют их поведение путем разрешения движения объектов в зоны производства при соответствии определяемых признаков подвижных объектов границам зон производства и фазам роста (развития) растений, включения их в соответствующий агротехнологический процесс возделывания агрокультуры и изменения операций по уходу за растениями.
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДСТВА АГРОПРОДУКЦИИ | 2003 |
|
RU2265989C2 |
| КОДИРОВАНИЕ И ДЕКОДИРОВАНИЕ ПОЛОЖЕНИЙ СПЕКТРАЛЬНЫХ ПИКОВ | 2014 |
|
RU2750644C2 |
| JP 7059465 A, 07.03.1995. | |||

