Изобретение относится к сельскому хозяйству, в частности к технологиям и автоматизированным устройствам регулирования технологических процессов производства агропродукции в растениеводстве. Эффективность изобретения заключается в обеспечении совокупного агроэкотехнического результата за счет энергоресурсосберегающего использования мобильных агрегатов в процессах возделывания агрокультур и высокоточной реализации технологических операций, адаптированных к особенностям роста и развития растений в открытом грунте. Может найти применение в различных регионах страны при производстве агропродукции, для комплексной автоматизации технологических процессов возделывания растениеводческой продукции в полеводстве.
Известен способ регулирования производства агропродукции (патент на изобретение №2265989), включающий определение морфологических признаков объектов аграрного производства в нескольких зонах производства, в зависимости от которых осуществляется регулирование объектами для каждой зоны производства при обнаружении отклонений морфологических параметров объектов аграрного производства воздействиями техногенного и природного характера. Недостатком данного изобретения является отсутствие возможности повышения точности регулирования разномасштабных объектов аграрного производства и дифференцированного управления мобильными средствами, машинными агрегатами, рабочими органами.
Известен наиболее близкий к изобретению способ регулирования возобновляемого производства агропродукции (патент на изобретение №2377764), включающий определение морфологических признаков объектов аграрного производства в нескольких зонах и в течение многолетних сроков возделывания агрокультур, в зависимости от тенденций роста и развития которых осуществляется периодическое регулирование возобновления агротехнологических циклов производства сельскохозяйственной продукции. Недостатком данного изобретения является отсутствие возможности регулирования материальных и энергетических затрат в соответствии с агроэкологической неоднородностью местности возделывания сельскохозяйственных культур, депрессивности зон произрастания растений, морфологических особенностей роста и развития.
Задачей изобретения является расширение функциональных возможностей регулирования производства агропродукции за счет повышения точности позиционирования мобильных агрегатов и исполнительных рабочих органов сельскохозяйственных орудий при возделывании агрокультуры в полевых условиях, и за счет снижения материальных и энергетических затрат при реализации агротехнологических процессов.
В результате использования предлагаемого изобретения повышается общесистемный оптимизационный эффект и качество регулирования производства агропродукции. При каждом возобновляемом цикле реализации технологии производства агропродукции целенаправленно отслеживаются и уточняются знания по агроэкотехнологическим особенностям роста и развития растений в заданной местности, на заданном посеве, в конкретном месте произрастания, в реальном масштабе времени. Повышение знаний о состоянии растений в посадках обеспечивает возможность перехода к рациональному, энергоресурсосберегающему применению сельскохозяйственной техники - вместо сплошной работы «вслепую» по всему полю или угодью.
Вышеуказанный результат достигается тем, что предлагается новый способ позиционирования мобильных агрегатов при возделывании агрокультур, в котором осуществляют многократный видеомониторинг космическим спутником местности размещения посевов агрокультур, периодически регистрируют электронные карты местности, на их изображениях определяют неблагоприятные посевы агрокультур по изменениям их морфологических признаков, направляют в воздушное пространство неблагоприятных посевов агрокультур беспилотный летательный аппарат, движущийся по установленному маршруту с заданной скоростью и высотой, осуществляют управление им и производят видеомониторинг неблагоприятных посевов, составляют крупномасштабные электронные карты неблагоприятных посевов агрокультур, определяют на их изображениях депрессивные зоны произрастания растений по изменениям их морфологических признаков, направляют мобильный агрегат в зоны депрессивного развития растений, осуществляют стереовидеомониторинг растений мобильным агрегатом, составляют трехмерные электронные карты мест произрастания растений, регулируют режимы и параметры рабочих органов мобильного агрегата в соответствии с трехмерными пространственными координатами границ произрастания растений и результатами регистрации их морфологических признаков.
Технический результат достигается тем, что в предлагаемое устройство включены беспилотный летательный аппарат, два блока передачи-приема данных, блок встроенного тестирования и управления, блок ориентации в трехмерных координатах, при этом беспилотный летательный аппарат имеет возможность двигаться в пределах возделываемого угодья, блок искусственного зрения и первый блок приема-передачи данных размещены на беспилотном летательном аппарате, второй блок приема-передачи данных и блок непрерывного встроенного тестирования и управления установлены на наземном мобильном средстве, при этом выход блока искусственного зрения соединен с входом первого блока приема-передачи данных, выход второго блока приема-передачи данных соединен с первым входом блока встроенного тестирования и управления, выход блока ориентации в трехмерных координатах соединен со вторым входом блока встроенного тестирования и управления.
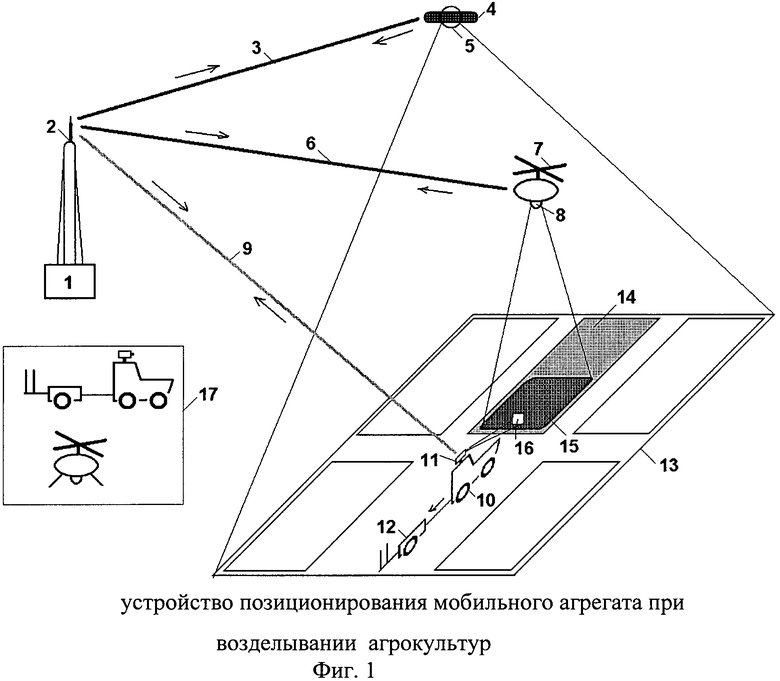
Сущность изобретения поясняется фиг.1-3. На фиг.1 изображена структурная схема исполнения способа позиционирования мобильных агрегатов при производстве агропродукции. На фиг.2 изображена схема возделываемого угодья и мобильные исполнительные средства. На фиг.3 дана структурная схема устройства управления мобильным агрегатом.
На фиг.1-3 изображено: центр управления 1; базовая станция приема-передачи информации 2; канал связи со спутником 3; космический спутник 4; средство космического видеомониторинга 5; канал связи с летательным аппаратом 6; беспилотный летательный аппарат 7; средство воздушного видеомониторинга 8; канал связи с мобильным агрегатом 9; наземный мобильный агрегат 10; средство наземного стереомониторинга 11; регулируемый рабочий орган 12; местности размещения посевов агрокультур 13; неблагоприятный посев агрокультуры 14; депрессивная зона произрастания агрокультуры 15; место произрастания растений 16; площадка для размещения мобильных средств 17; возделываемое поле 18, наземное мобильное средство 19, беспилотный дистанционно управляемый вертолет 20, первый блок искусственного зрения 21, второй блок искусственного зрения 22, первый блок передачи-приема данных 23, второй блок передачи-приема данных 24, блок встроенного тестирования и управления 25, блок ориентации в трехмерных координатах 26.
Способ реализуется следующим образом. В период возделывания агрокультуры, с момента появления всходов до сбора урожая осуществляют видемониторинг возделываемого угодья с помощью средств космического видеомониторинга 5, видеокамер, установленных на орбитальном космическом спутнике 4. В качестве информационного источника выбирается спутник, траектория полета которого совпадает с местностью размещения посевов агрокультур. В результате многократного пролета спутника над выбранной территорией периодически регистрируют видеоцифровые изображения местности размещения посевов агрокультур 13 и передают через канал связи 3 на базовую станцию 2 приема-передачи информации, в центр управления 1. В интерактивном или автоматическом режиме, с помощью средств компьютерного зрения, на цифровых изображениях регистрируют контуры полей и определяются параметры морфологических признаков (форма, площадь, периметр, ортогональные геометрические размеры, цветовой тон, насыщенность цвета, гистограмма распределения цветовой окраски почвы и растений и др.). В результате анализа последовательного ряда цифровых изображений местности выявляют динамику параметров морфологических признаков на выделенных контурах полей и по контрасту определяют неблагоприятные посевы агрокультур 14, направляют туда беспилотный летательный аппарат 7, который может вести обработку посева (ядохимикатами, стимуляторами роста) и одновременно производить видеомониторинг растений в посадках.
Для уточнения текстурных (внутриконтурных) особенностей неблагоприятных посевов агрокультур экономически целесообразно применить беспилотный летательный аппарат 7 малых размеров, разместив на нем средство воздушного видеомониторинга (видеоцифровые камеры) 8. Дистанционно пилотируемый летательный аппарат по заданному маршруту, с заданной скоростью, на заданной высоте, при использовании соответствующих технических средств видеосъемки обеспечивает требуемую скорость перемещений, точность съемки и устойчивость кадра. Полученные данные с беспилотного летательного аппарата 7 передают по беспроводной связи 6 на базовую станцию 2, где находится информационно-аналитический центр управления 1. После анализа совокупности видеоцифровых изображений, полученных с летательного аппарата, по контрасту морфологических признаков обнаруживают контур депрессивной зоны 15 произрастания растений и определяют местоположение депрессивной зоны на карте неблагоприятного поля 14, регистрируют параметры морфологических признаков депрессивной зоны (форма, площадь, периметр, ортогональные геометрические размеры, цветовой тон, насыщенность цвета, число растений на 1 м2, распределение цветовой окраски листовой поверхности растений).
В обнаруженные зоны депрессивного развития направляют наземный мобильный агрегат 10 для выполнения соответствующих агротехнологических операций, предотвращающих распространение депрессивной зоны 15 или оздоравливающих растения. Мобильный агрегат осуществляет работу не по всему полю, а только в границах депрессивной зоны, тем самым, экономя материальные и энергетические ресурсы.
В депрессивных зонах 15 возделываемого угодья мобильный агрегат осуществляет управление рабочими органами прицепной сельскохозяйственной машины путем ориентации их в трехмерном пространстве. Для этого, полученный в результате воздушного видеомониторинга, двухмерный план размещения растений преобразовывают в трехмерные сцены путем дополнительного привлечения результатов стереовидеомониторинга растений средством технического зрения 11 наземного мобильного агрегата 10. При выполнении технологических операций рабочие органы 12 наземного мобильного агрегата 10 ориентируют в трехмерных координатах относительно места произрастания растений. Это условие позволяет производить операции индивидуально и целенаправленно для конкретного участка рабочей зоны или отдельного растения, с учетом его физиологического состояния, регистрируемого по характерным морфологическим признакам (геометрическим размерам, окраске).
Реализация предлагаемого способа позиционирования мобильных средств при возделывании агрокультур предусматривает видеомониторинг и картографирование возделываемого угодья, составление электронных тематических планов возделываемого угодья, определение динамики процессов изменения состояния посевов и почвы в период возделывания, выявление территориально распределенных неблагоприятных посевов и депрессивных зон произрастания растений, проведение технологических операций индивидуально-раздельной обработки растений, стимулирующих усиленное развитие растений, устраняющих или локализирующих депрессивные зоны, при этом технические средства видеоконтроля размещают на движущемся беспилотном летательном аппарате и наземном мобильном агрегате, а данные, полученные с беспилотного летательного аппарата, передают по беспроводной связи через коммуникационный центр управления наземному мобильному агрегату, причем в депрессивных зонах или на других участках возделываемого угодья рабочие органы наземного мобильного агрегата ориентируют в трехмерных координатах, установленных по результатам воздушного видемониторинга и дополнительного стереовидеомониторинга растений с наземного мобильного агрегата.
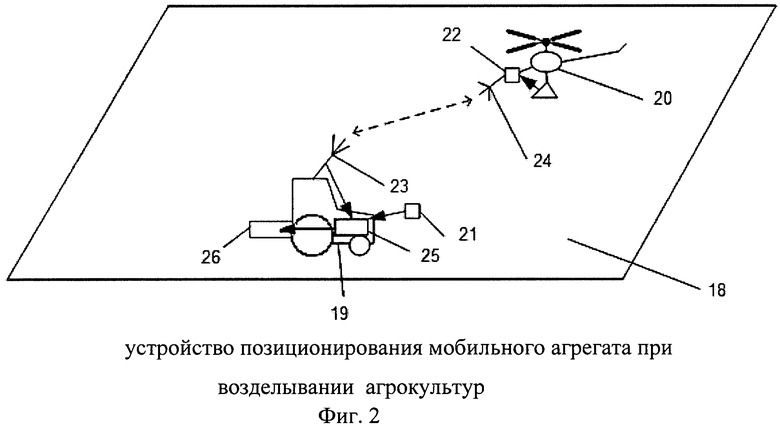
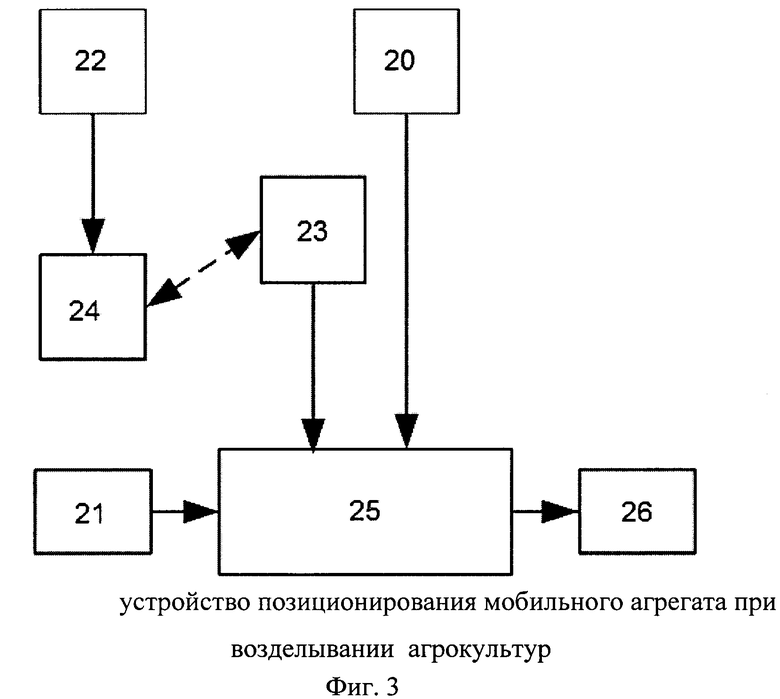
На фиг.2-3 показано устройство позиционирования мобильных агрегатов при возделывании агрокультур.
Первый блок искусственного зрения 21, первый блок приема-передачи данных 23, блок непрерывного встроенного тестирования и управления 25, блок ориентации в трехмерных координатах 26 - установлены на наземном мобильном средстве 19. Второй блок искусственного зрения 22 и второй блок приема-передачи данных 24 размещены на беспилотном дистанционно управляемом вертолете 20. Выход первого блока искусственного зрения 21 соединен с первым входом блока встроенного тестирования и управления 25, выход второго блока искусственного зрения 22 соединен с входом второго блока приема-передачи данных 24, выход блока ориентации в трехмерных координатах 26 соединен со вторым входом блока встроенного тестирования и управления 25, выход второго блока приема-передачи данных 24 соединен с третьим входом блока встроенного тестирования и управления 25 через радиоканал.
Устройство работает следующим образом. В соответствии с регламентом технологического процесса беспилотный дистанционно управляемый вертолет 20 производит облет возделываемого угодья 18. Технические средства второго блока искусственного зрения 22 производят съемку фрагментов возделываемого угодья 18. С помощью второго блока передачи-приема данных 24 видеоинформация, зафиксированная вторым блоком искусственного зрения 22, передается на первый блок передачи-приема данных 21, а затем поступает в блок встроенного тестирования и управления 25. Блок встроенного тестирования и управления 25 обрабатывает полученную видеоинформацию и вырабатывает управляющие команды наземному мобильному средству 19 на выполнение технологических операций на депрессивных участках возделываемого угодья или на депрессивных растениях. Данная видеоинформация используется при дальнейшем функционировании агрокомплекса для оценки выполненных технологических операций и как ретроспективная. Для депрессивных или других участков возделываемого угодья, обнаруженных по результатам воздушного видеоконтроля и на которых выполняют рабочими агрегатами 26 агротехнологические операции, для повышения точности и качества их выполнения, результат воздушного видеконтроля в виде двухмерных изображений места расположения растений преобразовывают в блоке 25 в трехмерные изображения путем привлечения дополнительных результатов стереовидеоконтроля растений средством искусственного зрения 21 с мобильного агрегата. Поэтому при выполнении технологических операций рабочие органы 26 мобильного агрегата 19 ориентируются в трехмерных координатах.
Практическое использование предлагаемого способа и устройства рассмотрим на примере процессов выращивания томатов в открытом грунте. Данный агропроцесс предполагает, с учетом природно-климатических условий возделывания томатов, выполнение операций подачи растениям питательных растворов и удобрений, уничтожение сорняков, вредителей и др. Все эти работы производят в рамках регламента технологического процесса. Тем не менее, в отдельных зонах или участках возделываемого угодья возникают отклонения характеристик растений для определенных стадий их вегетации от требуемых по технологическим нормам, например, рост и(или) цветение на отдельных растениях или в отдельных зонах запаздывают, отстает развитие плодов или др. При выполнении предлагаемого способа реализации агротехнологий определяют депрессивные растения или сообщества растений. Способ предусматривает детальное исследование растений в трех плоскостях с помощью видеокамер. Для депрессивных растений сравнением полученных видеообразов с заложенными в тестовой базе эталона развития аграрного производства устанавливают и определяют причину ухудшения технологических характеристик растения и конкретизируют мероприятия по устранению этих причин. Например, ежедневный прирост саженцев томатов должен быть не менее 3-5 см в течение 10 дней после их высадки и 2-3 см в следующие 10 дней. Система выявила по морфологическим особенностям роста и развития томатов, что причиной отставания роста саженцев является недостаток минерального корневого питания в данной зоне обрабатываемого угодья. Дополнительное внесение питательных растворов должно быть произведено для конкретных растений или конкретного участка. На стадии плодоношения томатов основное внимание уделяется контролю размера плодов. При этом выполняется детальный видеообзор плодов. Полученные данные видеообразов плодов могут быть использованы также для выборочного сбора созревших томатов.
Применение предлагаемого способа и устройства позиционирования мобильного агрегата при возделывании агрокультуры позволяет непрерывно оценивать качество выполняемых технологических процессов и при необходимости оперативно и экономно воздействовать на ход технологического процесса для повышения его качества, а также для увеличения продуктивности агрокультур.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство позиционирования мобильных агрегатов при возделывании агрокультур | 2019 |
|
RU2710163C1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССАМИ ВОЗДЕЛЫВАНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 2012 |
|
RU2538997C2 |
| ЭЛЕКТРОННО-ОПТИЧЕСКИЙ СПОСОБ РЕГУЛИРОВАНИЯ ТЕХНОЛОГИИ ПРОИЗВОДСТВА АГРОПРОДУКЦИИ | 2009 |
|
RU2423042C2 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ИСПОЛЬЗОВАНИЯ МОБИЛЬНОГО АГРЕГАТА, ОБОРУДОВАННОГО ДРОНОМ | 2019 |
|
RU2738352C1 |
| Устройство и способ беспилотной авиатехнологии управления агрообъектами в экосистемах | 2018 |
|
RU2704142C1 |
| Способ и устройство возделывания агрокультур по управляемым зонам | 2015 |
|
RU2617340C2 |
| СПОСОБ И УСТРОЙСТВО РЕАЛИЗАЦИИ МОСТОВЫХ АГРОТЕХНОЛОГИЙ | 2009 |
|
RU2432727C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТЕРРИТОРИАЛЬНО РАСПРЕДЕЛЕННОГО МНОГООТРАСЛЕВОГО ПРОИЗВОДСТВА АГРОПРОДУКЦИИ | 2010 |
|
RU2444177C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДСТВА АГРОПРОДУКЦИИ | 2003 |
|
RU2265989C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВОЗОБНОВЛЯЕМОГО ПРОИЗВОДСТВА АГРОПРОДУКЦИИ | 2008 |
|
RU2377764C2 |
Изобретение относится к сельскому хозяйству, в частности к технологиям и автоматизированным устройствам регулирования технологических процессов производства агропродукции в растениеводстве. Устройство содержит первый блок искусственного зрения, размещенный на мобильном средстве, и блок обработки видеосигнала. В устройство включены беспилотный летательный аппарат, второй блок искусственного зрения, два блока передачи-приема данных, блок тестирования и управления, блок ориентации в трехмерных координатах. Непилотируемый летательный аппарат имеет возможность двигаться в пределах возделываемого угодья. Первый блок приема-передачи данных, блок встроенного тестирования и управления, блок ориентации в трехмерных координатах установлены на наземном мобильном средстве. Второй блок искусственного зрения и второй блок приема-передачи данных размещены на непилотируемом летательном аппарате. Выход второго блока искусственного зрения соединен с входом второго блока приема-передачи данных. Выход первого блока приема-передачи данных соединен с первым входом блока встроенного тестирования и управления. Выход блока ориентации в трехмерных координатах соединен со вторым входом блока встроенного тестирования и управления. Изобретение обеспечивает расширение функциональных возможностей регулирования производства агропродукции. 3 ил.
Устройство позиционирования мобильного агрегата при возделывании агрокультур, содержащее первый блок искусственного зрения, размещенный на мобильном средстве, блок обработки видеосигнала, отличающееся тем, что в устройство включены беспилотный летательный аппарат, второй блок искусственного зрения, два блока передачи-приема данных, блок тестирования и управления, блок ориентации в трехмерных координатах, при этом непилотируемый летательный аппарат имеет возможность двигаться в пределах возделываемого угодья, первый блок приема-передачи данных, блок встроенного тестирования и управления, блок ориентации в трехмерных координатах установлены на наземном мобильном средстве, второй блок искусственного зрения и второй блок приема-передачи данных размещены на непилотируемом летательном аппарате, при этом выход второго блока искусственного зрения соединен с входом второго блока приема-передачи данных, выход первого блока приема-передачи данных соединен с первым входом блока встроенного тестирования и управления, выход блока ориентации в трехмерных координатах соединен со вторым входом блока встроенного тестирования и управления.
| СИСТЕМА ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО ПРЕДПРИЯТИЯ, ИСПОЛЬЗУЮЩЕГО ТЕХНОЛОГИЮ ТОЧНОГО ЗЕМЛЕДЕЛИЯ | 2004 |
|
RU2251240C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДСТВА АГРОПРОДУКЦИИ | 2003 |
|
RU2265989C2 |
| US 6199000 B1, 06.03.2001 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ ВОЗОБНОВЛЯЕМОГО ПРОИЗВОДСТВА АГРОПРОДУКЦИИ | 2008 |
|
RU2377764C2 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО ПРЕДПРИЯТИЯ, ИСПОЛЬЗУЮЩЕГО ТЕХНОЛОГИЮ ТОЧНОГО ЗЕМЛЕДЕЛИЯ | 2006 |
|
RU2295218C1 |

