Изобретение относится к виброзащитной технике, а именно к опорным виброзащитным элементам для крупногабаритных объектов, в том числе для подвески транспортных средств.
Известна конструкция пневмоамортизатора, описанная в а.с. №1106936, М. кл. F16F 9/04, содержащая обойму, пуансон, резинокордные диафрагму и догружающую оболочку. В уравновешенном состоянии нагрузка воспринимается только диафрагмой, усилия, создаваемые обеими гофрами догружающей оболочки, уравновешены, оболочка в восприятии нагрузки не участвует. При работе амортизатора догружающая оболочка создает дополнительное усилие, направленное в сторону, противоположную усилию диафрагмы, тем самым уменьшая упругие свойства пневмоамортизатора. Регулирование упругой характеристики происходит за счет изменения давления газа в догружающей оболочке.
Однако регулирование упругой характеристики пневмоамортизатора затруднено из-за значительного объема догружающей оболочки.
Известно также устройство пневматического амортизатора, описанное в а.с. №1758308, М. кл. F16F 9/00 (прототип), содержащее обойму, пуансон, соединенные между собой эластичным упругим элементом, установленные коаксиально последним и соосно между собой соленоиды, составной сердечник, жестко соединенный с обоймой, имеющий две магнитных части, установленные на равном расстоянии между катушками соленоидов в положении статического равновесия, и немагнитную проставку между магнитными частями.
Основным недостатком устройства является низкая эффективность гашения колебаний амортизируемого объекта в связи с тем, что катушки соленоидов постоянно включены в работу и создают разностное суммарное усилие. Причем непосредственно при смене режимов работы пневматического амортизатора это усилие имеет направление, способствующее развитию колебания. Так, при движении вниз основное усилие, направленное также вниз за счет втягивания магнитного сердечника в катушку, будет создавать нижний электромагнит. При движении амортизируемого объекта вверх за счет энергии упругого эластичного элемента аналогичная ситуация происходит с верхним электромагнитом. Эти явления снижают эффективность гашения колебаний и плавность хода транспортного средства.
Недостатком является то, что данное устройство может работать только в составе «короткоходовых» амортизаторов при размахе колебаний не более нескольких сантиметров, также соленоиды способны создавать незначительные усилия на сердечнике и при больших массах амортизируемого объекта подобное корректирующее устройство неэффективно. Если при работе возможны перекосы обоймы относительно пуансона, то вследствие этого возможно заклинивание сердечника или его поломка.
Также при ударных нагрузках при быстрых сменах режимов работы пневматического амортизатора корректирующее устройство при значительных индуктивностях соленоидов обладает большой инерционностью и эффективно только при относительно низких частотах колебаний амортизируемого объекта.
Задачей предлагаемого изобретения является повышение эффективности гашения колебаний при значительных размахах колебаний и массе амортизируемого объекта, повышение устойчивости пневматического амортизатора к перекосам, а также повышение быстродействия его работы.
Поставленная задача достигается тем, что в известном пневматическом амортизаторе, содержащем обойму, пуансон, соединенные между собой эластичным упругим элементом, шток, соединенный с обоймой, корректирующее устройство, размещенное внутри пуансона, согласно изобретению корректирующее устройство содержит два электродвигателя, имеющих каждый на своем валу зубчатое колесо, шток соединен с обоймой через шарнир Гука, снабжен направляющим элементом внутри пуансона и имеет двухстороннюю зубчатую рейку, зацепляемую с зубчатыми колесами обоих электродвигателей, зубчатые колеса сцеплены с разными сторонами зубчатой рейки штока, а оба электродвигателя соединены с блоком управления.
Электродвигатели могут быть асинхронными. В этом случае блок управления содержит соединенные последовательно преобразователь перемещения объекта, формирователь сигнала скорости объекта, устройство разделения сигнала управления, выходы которого соединены с формирователем трехфазного напряжения прямой последовательности и формирователем трехфазного напряжения обратной последовательности, причем выходы формирователя трехфазного напряжения прямой последовательности соединены со статорными обмотками первого асинхронного электродвигателя, а выходы формирователя трехфазного напряжения обратной последовательности соединены со статорными обмотками второго асинхронного электродвигателя.
Сущность изобретения поясняется чертежами, где
на фиг.1 представлен предложенный пневматический амортизатор;
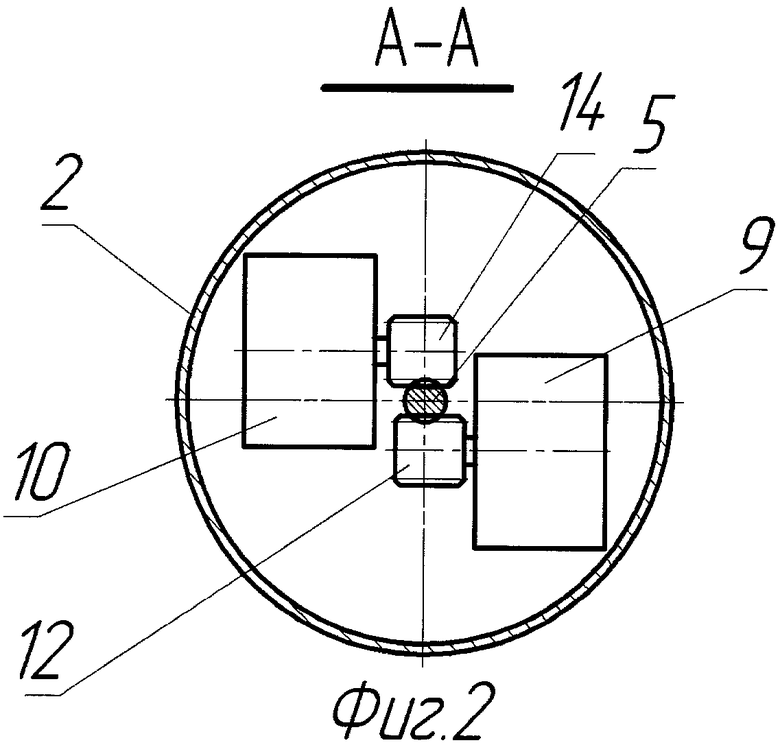
на фиг.2 представлен поперечный разрез А-А на фиг.1 предложенного пневматического амортизатора;
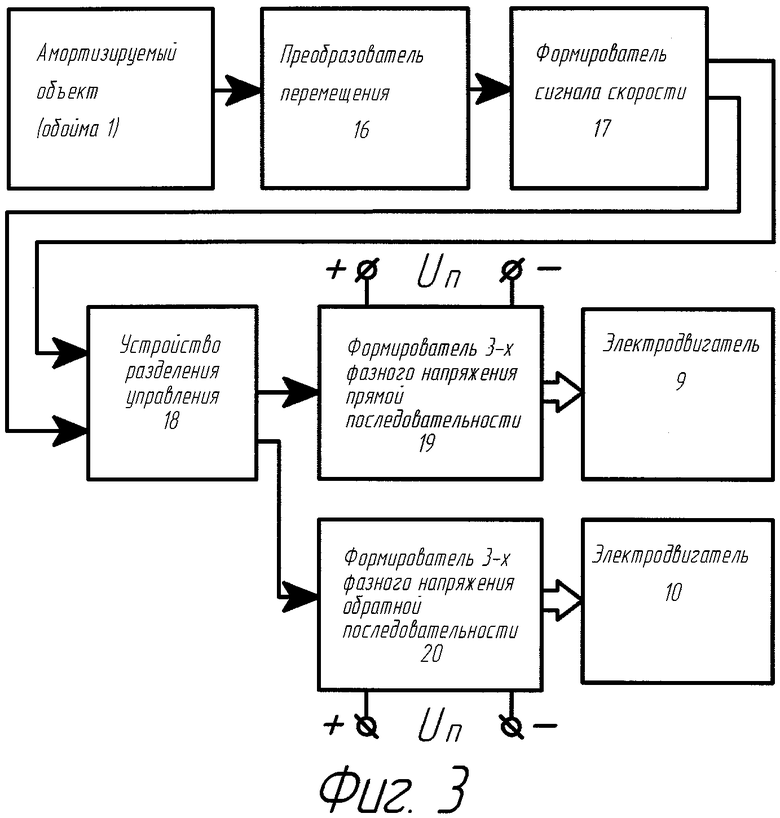
на фиг.3 приведена структурная схема блока управления;
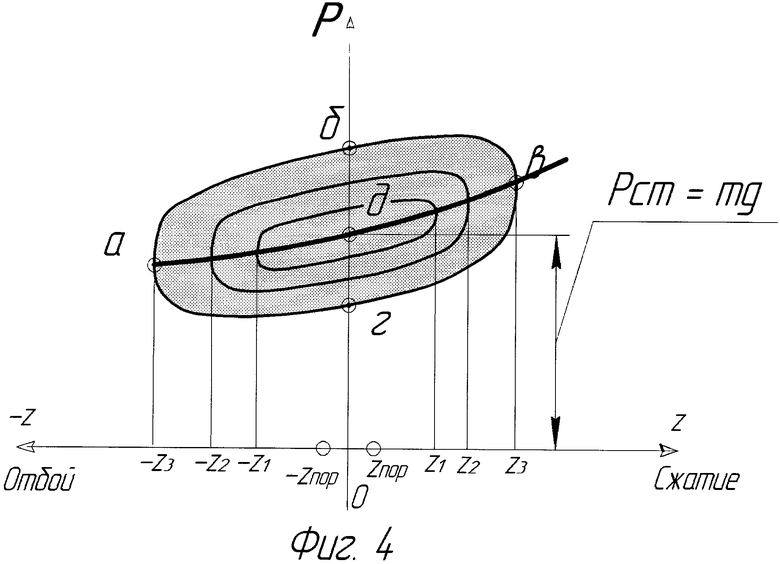
на фиг.4 приведена упругодемпфирующая характеристика пневматического амортизатора.
Пневматический амортизатор содержит обойму 1, пуансон 2, соединенные между собой эластичным упругим элементом 3, образующие упругий элемент 4, заполненный сжатым газом (или воздухом), шток 5, соединенный с обоймой 1 с помощью шарнира Гука 6, снабженный направляющим элементом 7 внутри пуансона 2, имеет двухстороннюю зубчатую рейку 8, корректирующее устройство, размещенное внутри пуансона 2, состоящее из двух электродвигателей 9 и 10. На валу 11 первого электродвигателя 9 расположено зубчатое колесо 12, зацепляемое с первой стороной зубчатой рейки 8 штока 5. На валу 13 второго электродвигателя 10 расположено зубчатое колесо 14, зацепляемое со второй стороной зубчатой рейки 8 штока 5. Электродвигатели 9 и 10 соединены с блоком управления 15.
Наиболее предпочтительно использовать в качестве электродвигателей 9 и 10 асинхронные электродвигатели, т.к. они наиболее простые по конструкции по обслуживанию в процессе эксплуатации, наиболее дешевы по стоимости по сравнению с электродвигателями других типов. В этом случае блок управления 15 содержит соединенные последовательно преобразователь перемещения 16 объекта, формирователь сигнала скорости 17 объекта, устройство разделения сигнала управления 18, выходы которого соединены с формирователем трехфазного напряжения прямой последовательности 19 и формирователем трехфазного напряжения обратной последовательности 20, причем выходы формирователя трехфазного напряжения прямой последовательности 19 поданы на статорные обмотки первого асинхронного электродвигателя 9, а выходы формирователя трехфазного напряжения обратной последовательности 20 поданы на статорные обмотки второго асинхронного электродвигателя 10.
Пневматический амортизатор работает следующим образом.
В статическом положении пневматического амортизатора и при колебаниях с малой амплитудой сила тяжести амортизируемого объекта уравновешивается только за счет избыточного давления Рст сжатого газа упругого элемента 4 в соответствии с рабочей характеристикой упругого элемента «а-д-в» (Фиг.4), т.е.:
M×g=Рст,
где М - масса амортизируемого объекта;
g - ускорение свободного падения тела.
При колебаниях амортизируемого объекта происходит вертикальное смещение обоймы 1 с амортизируемым объектом относительно пуансона 2. При движении обоймы 1 и штока 5 вниз осуществляется процесс сжатия газа в упругом элементе 4. При этом блок управления 15 подключает к статорным обмоткам электродвигателя 9 формирователь трехфазного напряжения прямой последовательности 19. При этом ротор электродвигателя 9 вращается в одном направлении. За счет зацепления зубчатого колеса 12 вала 11 ротора электродвигателя 9 с одной стороной зубчатой рейки 8 штока 5 на нем создается электромагнитное усилие, противодействующее его перемещению вниз. Это усиливает жесткостные характеристики пневматического амортизатора, характеристика нагружения на упругодемпфирующей характеристике пневматического амортизатора (кривая «а-б-в») находится выше характеристики упругого элемента 4 (кривая «а-д-в»). Электромагнитная сила электродвигателя противодействует совместно с упругой силой сжатого газа перемещению штока 5 и амортизируемого объекта, при этом снижается ход перемещения амортизируемого объекта вниз и аккумулирование энергии упругого элемента 4 за счет сжатия газа.
При движении обоймы 1 и штока 5 вверх осуществляется процесс расширения газа. При этом блок управления 15 подключает к статорным обмоткам электродвигателя 10 формирователь трехфазного напряжения обратной последовательности 20. При этом ротор электродвигателя 10 вращается в другом направлении. За счет зацепления зубчатого колеса 14 вала 13 ротора электродвигателя 10 со второй стороной зубчатой рейки 8 штока 5 на нем создается электромагнитное усилие, противодействующее его перемещению вверх. Это усиливает демпфирующие характеристики пневматического амортизатора, характеристика разгрузки на упругодемпфирующей характеристике пневматического амортизатора (кривая «в-г-а») находится ниже характеристики упругого элемента 4 (кривая «а-д-в»). Электромагнитная сила электродвигателя противодействует упругой силе сжатого газа, при этом снижается ход перемещения амортизируемого объекта вверх и энергия колебаний, возвращаемая упругим элементом обратно амортизируемому объекту. Площадь петли «а-б-в-г» на упругодемпфирующей характеристике отражает рассеянную пневматическим амортизатором механическую энергию одного колебания амортизируемого объекта.
За счет введения шарнира Гука, связывающего обойму 1 со штоком 5, и направляющего элемента 7 для штока 5 внутри пуансона 2 могут быть снижены требования к перекосам обоймы относительно пуансона, пневматический амортизатор останется при этом работоспособным.
Блок управления 15 работает следующим образом.
При незначительных колебаниях амортизируемого объекта, когда их размах не превышает определенного порогового значения Zпор, корректирующее устройство в работе не участвует, в гашении колебаний участвует только упругий элемент 4. При значительных колебаниях амортизируемого объекта блок управления подключает в работу корректирующее устройство. В соответствии с сигналом преобразователя перемещения 16 объекта формирователь 17 сигнала скорости объекта образует разнополярные сигналы, при перемещении объекта вниз формируется сигнал положительной полярности, а при перемещении объекта вверх - сигнал отрицательной полярности. Устройство разделения управления 18 в зависимости от знака сигнала формирует управляющее воздействие на включение разных формирователей трехфазного напряжения и на их подключение к статорным обмоткам соответствующих электродвигателей.
При сжатии газа в упругом элементе 4 формирователь 17 сигнала скорости объекта подает положительный сигнал на устройство разделения управления 18, которое включает в работу формирователь трехфазного напряжения прямой последовательности 19, подключая его силовые выходы к статорным обмоткам электродвигателя 9. При этом на штоке 5 создается противодействующая осевая сила, направленная вверх и увеличивающая жесткостные свойства пневматического амортизатора. Электродвигатель 10 при этом обесточен.
При расширении газа в упругом элементе 4 формирователь 17 сигнала скорости объекта подает отрицательный сигнал на устройство разделения управления 18, которое включает в работу формирователь трехфазного напряжения обратной последовательности 20, подключая его силовые выходы к статорным обмоткам электродвигателя 10. При этом на штоке 5 этом создается противодействующая осевая сила, направленная вниз и увеличивающая демпфирующие свойства пневматического амортизатора. Электродвигатель 9 при этом обесточен.
Таким образом, введение двух электродвигателей, работающих в тормозном режиме, в корректирующее устройство позволяет снизить размах колебаний амортизируемого объекта при его значительной массе. Также каждый электродвигатель работает только при одном режиме пневматического амортизатора (ходе сжатия или ходе отбоя), что позволяет быстро включаться в работу, особенно при ударных нагрузках. При изменении параметров напряжения формирователей трехфазного напряжения можно получать разные усилия на штоке и регулировать, таким образом, упругодемпфирующую характеристику пневматического амортизатора. За счет введения шарнира Гука могут быть снижены требования к возникновению перекосов обоймы относительно пуансона при работе пневматического амортизатора. Использование предлагаемого пневматического амортизатора позволяет повысить эффективность гашения колебаний и плавность хода транспортного средства, а также улучшает условия работы экипажа и обеспечивает требуемую сохранность спецгрузов при транспортировке.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2424126C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2422294C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2422295C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2424125C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2424455C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2424128C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2424127C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2424456C2 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2011 |
|
RU2481506C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ УПРУГИЙ ЭЛЕМЕНТ | 2010 |
|
RU2442918C2 |
Изобретение относится к опорным виброзащитным элементам для крупногабаритных объектов. Пневматический амортизатор содержит обойму (1), пуансон (2), соединенные между собой эластичным упругим элементом (3), шток (5), соединенный с обоймой (1) с помощью шарнира Гука (6). Шток (5) снабжен направляющим элементом (7) внутри пуансона (2) и имеет двухстороннюю зубчатую рейку (8). Корректирующее устройство размещено внутри пуансона (2) и состоит из двух электродвигателей (9, 10). На валу (11) первого электродвигателя (9) расположено зубчатое колесо (12), зацепляемое с первой стороной зубчатой рейки (8) штока (5). На валу (13) второго электродвигателя (10) расположено зубчатое колесо (14), зацепляемое со второй стороной зубчатой рейки (8) штока (5). Электродвигатели (9, 10) соединены с блоком управления (15). Достигается повышение эффективности гашения колебаний. 1 з.п. ф-лы, 4 ил.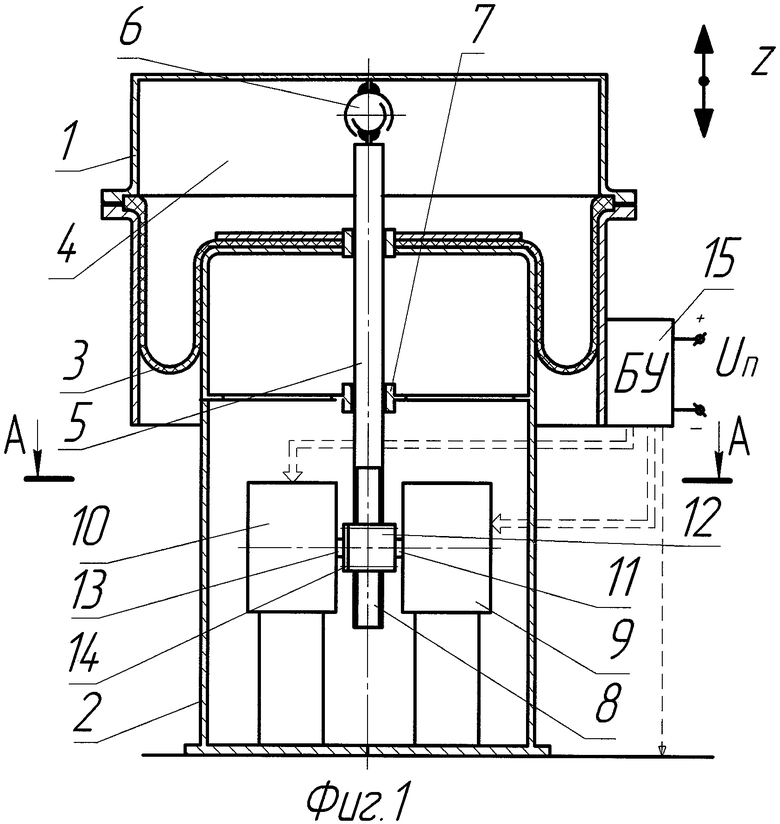
1. Пневматический амортизатор, содержащий обойму, пуансон, соединенные между собой эластичным упругим элементом, шток, соединенный с обоймой, корректирующее устройство, размещенное внутри пуансона, отличающийся тем, что корректирующее устройство содержит два электродвигателя, имеющих каждый на своем валу зубчатое колесо, шток соединен с обоймой через шарнир Гука, снабжен направляющим элементом внутри пуансона и имеет двухстороннюю зубчатую рейку, зацепляемую с зубчатыми колесами обоих электродвигателей, зубчатые колеса сцеплены с разными сторонами зубчатой рейки штока, а оба электродвигателя соединены с блоком управления.
2. Пневматический амортизатор по п.1, отличающийся тем, что электродвигатели асинхронные, блок управления содержит соединенные последовательно преобразователь перемещения объекта, формирователь сигнала скорости объекта, устройство разделения сигнала управления, выходы которого соединены с формирователем трехфазного напряжения прямой последовательности и формирователем трехфазного напряжения обратной последовательности, причем выходы формирователя трехфазного напряжения прямой последовательности соединены со статорными обмотками первого асинхронного электродвигателя, а выходы формирователя трехфазного напряжения обратной последовательности соединены со статорными обмотками второго асинхронного электродвигателя.
| Пневматический амортизатор | 1990 |
|
SU1758308A1 |
| МАГНИТНЫЙ АМОРТИЗАТОР | 2004 |
|
RU2286491C2 |
| DE 19605802 A1, 21.08.1997 | |||
| US 2002089107 A1, 11.07.2002. | |||

