Изобретение относится к виброзащитной технике, а именно к опорным виброзащитным элементам для подвески транспортных средств, и может использоваться для технологического оборудования.
Известна конструкция пневмоамортизатора, описанная в а.с. №1106936, М. кл. F16F 9/04, содержащая обойму, пуансон, резинокордные диафрагму и догружающую оболочку. В уравновешенном состоянии нагрузка воспринимается только диафрагмой, усилия, создаваемые обоими гофрами догружающей оболочки, уравновешены, оболочка в восприятии не участвует. При работе амортизатора догружающая оболочка создает дополнительное усилие, направленное в сторону, противоположную усилию диафрагмы, тем самым уменьшая упругие свойства пневмоамортизатора. Регулирование упругой характеристики происходит за счет изменения давления газа в догружающей оболочке. Однако регулирование упругой характеристики пневмоамортизатора затруднено из-за значительного объема догружающей оболочки.
Известно также устройство пневматического амортизатора, описанное в а.с. №1758308, М. кл. F16F 9/00 (прототип), содержащее обойму, пуансон, соединенные между собой эластичным упругим элементом, установленные коаксиально последним и соосно между собой соленоиды, составной сердечник, жестко соединенный с обоймой, имеющий две магнитные части, установленные на равном расстоянии между катушками соленоидов в положении статического равновесия, и немагнитную проставку между магнитными частями.
Основным недостатком устройства является низкая эффективность гашения колебаний амортизируемого объекта в связи с тем, что катушки соленоидов постоянно включены в работу и создают разностное суммарное усилие. Причем непосредственно при смене режимов работы пневматического амортизатора это усилие имеет направление, способствующее развитию колебания; так, при движении вниз основное усилие, направленное также вниз за счет втягивания магнитного сердечника в катушку, будет создавать нижний электромагнит. При движении амортизируемого объекта вверх за счет энергии упругого эластичного элемента аналогичная ситуация происходит с верхним электромагнитом. Эти явления снижают эффективность гашения колебаний и плавность хода транспортного средства. Также значения электромагнитных сил, создаваемых соленоидами, являются относительно небольшими по сравнению с аналогичными силами других электромагнитных устройств (электромагнитов с П, Ш-образными магнитопроводами, электродвигателями и др.).
Задачей предлагаемого изобретения является повышение эффективности гашения колебаний и плавности хода транспортного средства.
Поставленная задача достигается тем, что в известном пневматическом амортизаторе, содержащем обойму, пуансон, соединенные между собой эластичным упругим элементом, согласно изобретению внутри пуансона размещен электромагнитный колебательный привод, содержащий асинхронный электродвигатель с ротором и статором, передаточный элемент с зубчатым венцом, установленный на оси качения, при этом ротор жестко связан с передаточным элементом, а зубчатый венец - со штоком, шток жестко связан с обоймой, кроме того, поверхности ротора и статора, обращенные одна к другой, выполнены в виде цилиндрических секторов, при этом ротор расположен вне плоскости качения передаточного элемента, а статорные обмотки электродвигателя подключены к блоку управления.
Блок управления содержит соединенные последовательно преобразователь перемещения объекта, формирователь сигнала скорости объекта, устройство разделения сигнала управления, а также формирователь трехфазного напряжения прямой последовательности и формирователь трехфазного напряжения обратной последовательности, силовой коммутатор, причем устройство разделения сигнала управления соединено с формирователями трехфазного напряжения прямой и обратной последовательности и силовым коммутатором, выходы обоих формирователей поданы на входы силового коммутатора, выходы которого соединены со статорными обмотками электродвигателя.
В пневматическом амортизаторе возможно использовать роторы разных конструктивных исполнений, например конструкцию, в которой в роторе вдоль цилиндрической образующей выполнен сегментный паз, делящий ротор на две равные части.
Сущность изобретения поясняется чертежами, где
- на фиг.1 представлен предложенный пневматический амортизатор в продольном сечении;
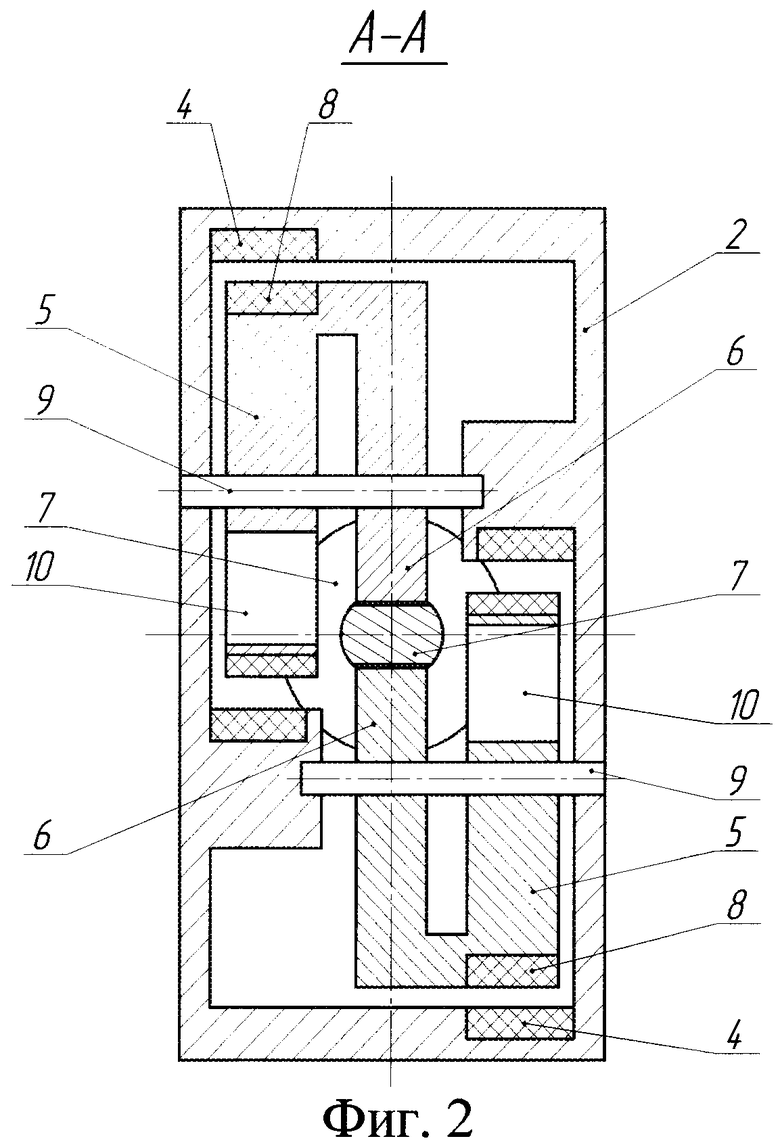
- на фиг.2 представлен пневматический амортизатор в сечении плоскостью А-А;
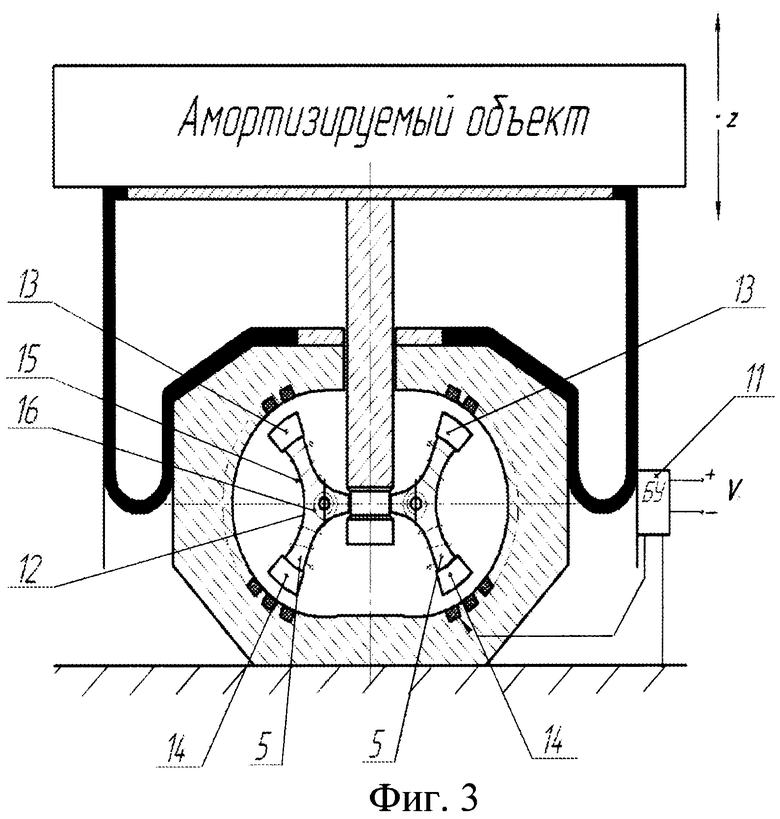
- на фиг.3 представлена конструкция пневматического амортизатора с ротором с сегментным пазом и полюсными наконечниками;
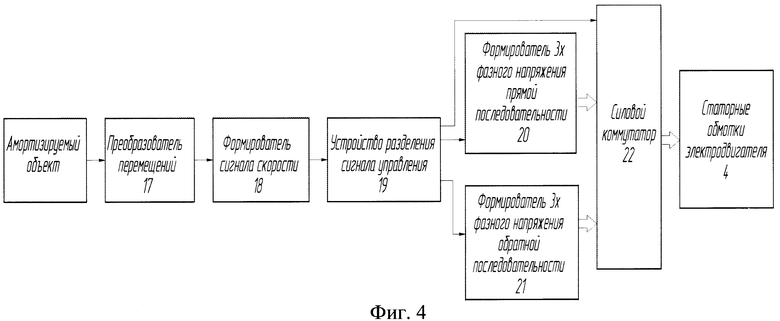
- на фиг.4 приведена структурная схема блока управления;
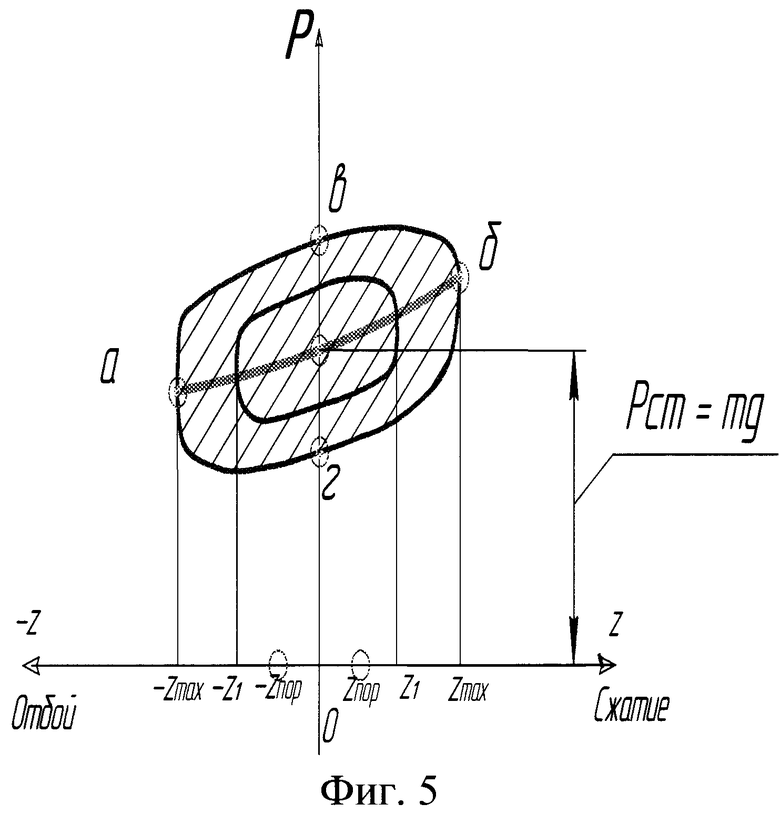
- на фиг.5 представлена упругодемпфирующая характеристика пневматического амортизатора.
Пневматический амортизатор содержит обойму 1, пуансон 2, являющийся одновременно корпусом электродвигателя, соединенные между собой эластичным упругим элементом 3 в виде резинокордной оболочки, обмотки 4 статора электродвигателя, размещенные в пазах корпуса 2, роторы 5 выполнены в виде сегментов и соединены с передаточными элементами с зубчатыми венцами 6, входящими в зацепление с ответными впадинами штока 7, который жестко связан с обоймой 1 и амортизируемым объектом. Роторы 5 имеют обмотки 8, установлены на осях 9 вне плоскости штока 7 и имеют эксцентричную относительно этих осей массу, чему способствует наличие окон 10 в теле роторов.
При выполнении роторов 5 с сегментными пазами 12 (фиг.3) они снабжены полюсными наконечниками 13 и 14, обмотками 15, а также пружинами 16, обеспечивающими возврат роторов 5 в среднее положение.
Блок управления 11 (фиг.4) содержит соединенные последовательно преобразователь перемещения 17 амортизируемого объекта, формирователь сигнала скорости 18 объекта, устройство разделения 19 сигнала управления, а также формирователь 20 трехфазного напряжения прямой последовательности и формирователь 21 трехфазного напряжения обратной последовательности, силовой коммутатор 22, причем устройство разделения 19 сигнала управления соединено с формирователями 20 и 21 трехфазного напряжения прямой и обратной последовательности и силовым коммутатором 22, выходы обоих формирователей 20 и 21 поданы на входы силового коммутатора 22, выходы которого соединены со статорными обмотками 4 электродвигателя.
Пневматический амортизатор работает следующим образом.
В статическом положении пневматического амортизатора и при колебаниях с малой амплитудой сила тяжести амортизируемого объекта уравновешивается только за счет избыточного давления Рст сжатого газа упругого элемента, образованного обоймой 1, пуансоном 2 и резинокордной оболочкой 3, в соответствии с рабочей характеристикой упругого элемента «а-б» (фиг.5), т.е.:
M*g=Рст,
где М - масса амортизируемого объекта;
g - ускорение свободного падения тела.
При колебаниях транспортного средства происходит смещение обоймы 1 с амортизируемым объектом относительно пуансона 2, шток 7 перемещается относительно корпуса электродвигателя. Электромагнитный привод работает только в динамическом режиме (в процессе перемещения штока при ходе сжатия или отбоя) при значительных колебаниях амортизируемого объекта, когда их размах превышает определенное пороговое значение |Z|>|Zпp|. При работе роторы 5 совершают колебательное движение всегда в тормозном режиме, противодействуя перемещениям штока 7.
При подключении обмоток 4 статора электродвигателя к блоку управления 11 создается пульсирующее магнитное поле, которое, пронизывая сегменты роторов 5, наводит ЭДС в их короткозамкнутых обмотках 8, а следовательно, и токи, которые, взаимодействуя с пульсирующим магнитным полем, создают вращающий момент, заставляющий роторы 5 поворачиваться вокруг осей 9. За счет зацепления между зубчатыми венцами 6 и штоком 7 колебательное вращение роторов 5 создает линейное движение штока 7, противодействующее движению обоймы 1 с амортизируемым объектом.
Для работы пневматического амортизатора, изображенного на фиг.3, на обмотки 8 роторов подается постоянное напряжение для создания постоянного магнитного поля, что также приводит к колебательному движению роторов.
Встречное движение роторов 5, имеющих эксцентричную массу, обеспечивает хорошую динамическую уравновешенность, расположение роторов 5 вне плоскости качения зубчатых венцов 6 позволяет создавать замкнутые магнитопроводы, что повышает КПД электродвигателя.
Блок управления 11 работает следующим образом.
Преобразователь перемещения 17 формирует свой выходной сигнал при значительных колебаниях амортизируемого объекта, когда их размах превышает определенное пороговое значение |Z|>|Zпp|. В соответствии с сигналом преобразователя перемещения 17 формирователь 18 сигнала скорости объекта образует разнополярные сигналы, при перемещении объекта вниз формируется сигнал отрицательной полярности, а при перемещении объекта вверх - сигнал положительной полярности. Устройство разделения управления 19 в зависимости от знака сигнала формирует управляющие воздействия на включение в работу разных формирователей трехфазного напряжения 20 или 21, на включение силового коммутатора 22, подключающего определенный формирователь трехфазного напряжения к статорным обмоткам 4 электродвигателя. Обмотки статора 4 формируют соответственно пульсирующие поля различного направления вращения, что приводит к созданию вращающих тормозных моментов разных знаков. Так, при движении амортизируемого объекта вниз создаются вращающие моменты, направление которых указано сплошными стрелками на фиг.1, формирующие противодействующее усилие на штоке 7, направленное вверх, при этом упругодемпфирующая характеристика (фиг.5) пневматического амортизатора образует участок «а-в-б». При движении амортизируемого объекта вверх создаются вращающие моменты, направление которых указано пунктирными стрелками на фиг.1, формирующие противодействующее усилие на штоке 7, направленное вниз, при этом упругодемпфирующая характеристика образует участок «б-г-а».
За счет организованной подобным образом работы электромагнитного привода упругодемпфирующая характеристика пневматического амортизатора имеет замкнутую форму в виде петли гистерезиса «а-в-б-г-а», площадь которой отражает поглощенную энергию колебаний амортизируемого объекта.
Таким образом, введение электромагнитного колебательного привода в конструкцию и организация его режима работы в зависимости от режима работы пневматического амортизатора позволяют снизить размах колебаний амортизируемого объекта. При изменении напряжения питания статорных обмоток можно получать разные усилия на штоке и регулировать, таким образом, упругодемпфирующую характеристику пневматического амортизатора. Использование предлагаемого пневматического амортизатора позволяет повысить эффективность гашения колебаний и плавность хода транспортного средства, а также улучшает условия работы экипажа и обеспечивает требуемую сохранность спецгрузов при транспортировке.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2424126C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2422294C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2422295C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2424124C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2424125C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2424128C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2424127C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2424456C2 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2011 |
|
RU2481506C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКАЯ ПОДВЕСКА | 2010 |
|
RU2443573C2 |
Изобретение относится к опорным виброзащитным элементам. Пневматический амортизатор содержит обойму (1) и пуансон (2), соединенные между собой эластичным упругим элементом (3). Внутри пуансона (2) размещен электромагнитный колебательный привод, содержащий асинхронный электродвигатель (4) с ротором (5) и статором, передаточный элемент с зубчатым венцом (6), установленный на оси качения (9). Ротор (5) жестко связан с передаточным элементом, а зубчатый венец (6) - со штоком (7). Шток (7) жестко связан с обоймой (1). На роторе (5) расположены обмотки (8). Поверхности ротора (5) и статора (4), обращенные одна к другой, выполнены в виде цилиндрических секторов. Ротор (5) расположен вне плоскости качения передаточного элемента. Статорные обмотки электродвигателя (4) подключены к блоку управления (11). Достигается повышение эффективности гашения колебаний. 2 з.п. ф-лы, 5 ил.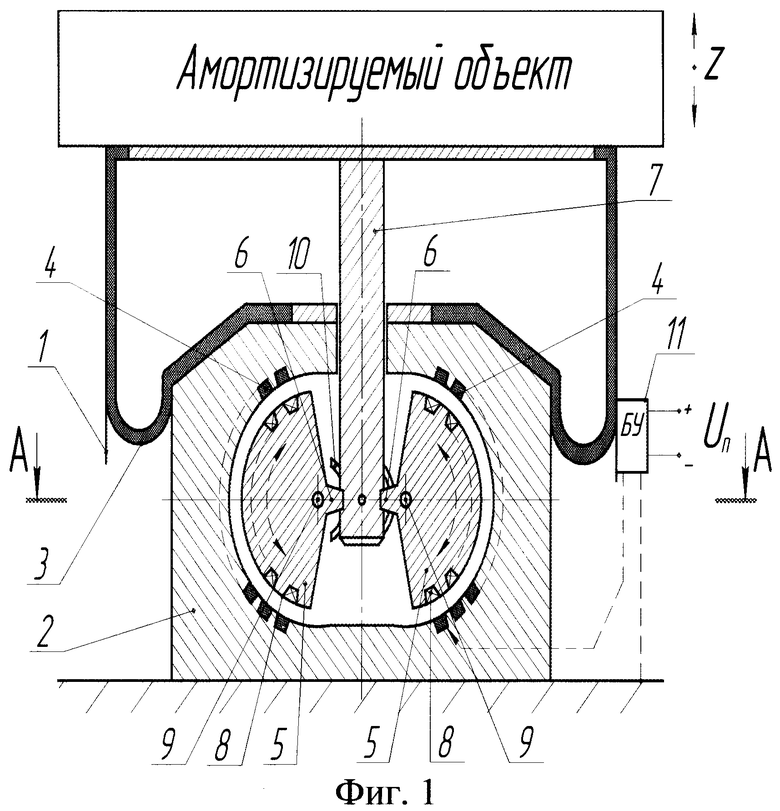
1. Пневматический амортизатор, содержащий обойму, пуансон, соединенные между собой эластичным упругим элементом, отличающийся тем, что внутри пуансона размещен электромагнитный колебательный привод, содержащий асинхронный электродвигатель с ротором и статором, передаточный элемент с зубчатым венцом, установленный на оси качения, при этом ротор жестко связан с передаточным элементом, а зубчатый венец - со штоком, шток жестко связан с обоймой, кроме того, поверхности ротора и статора, обращенные одна к другой, выполнены в виде цилиндрических секторов, при этом ротор расположен вне плоскости качения передаточного элемента, а статорные обмотки электродвигателя подключены к блоку управления.
2. Пневматический амортизатор по п.1, отличающийся тем, что блок управления содержит соединенные последовательно преобразователь перемещения объекта, формирователь сигнала скорости объекта, устройство разделения сигнала управления, а также формирователь трехфазного напряжения прямой последовательности и формирователь трехфазного напряжения обратной последовательности, силовой коммутатор, причем устройство разделения сигнала управления соединено с формирователями трехфазного напряжения прямой и обратной последовательности и силовым коммутатором, выходы обоих формирователей поданы на входы силового коммутатора, выходы которого соединены со статорными обмотками электродвигателя.
3. Пневматический амортизатор по п.1, отличающийся тем, что в роторе вдоль цилиндрической образующей выполнен сегментный паз, делящий ротор на две равные части.
| Пневматический амортизатор | 1990 |
|
SU1758308A1 |
| МАГНИТНЫЙ АМОРТИЗАТОР | 2004 |
|
RU2286491C2 |
| DE 19605802 A1, 21.08.1997 | |||
| US 2002089107 A1, 11.07.2002. | |||

