Область техники
Настоящее изобретение относится к устройству защиты пассажира транспортного средства и, в частности, к устройству защиты пассажира транспортного средства, которое прогнозирует столкновение и защищает пассажира транспортного средства.
Уровень техники
Различные технологии были предложены в качестве устройства защиты пассажира транспортного средства для защиты пассажира транспортного средства от столкновения.
Например, в технологии, раскрытой в публикации заявки на патент Японии № 2007-500650, предлагается прогнозировать аварию, в которой существует вероятность того, что транспортное средство станет участником ДТП, посредством датчика, такого как радиолокационный датчик, видеодатчик, датчик на основе лазерного сканера или т.п., и в случае, когда авария была спрогнозирована, регулировать спинку сиденья со скоростью, которая выше, чем скорость регулировки во время регулировки угла спинки сиденья.
Дополнительно в технологии, раскрытой в японском патенте № 2946995, предлагается прогнозировать столкновение транспортного средства и управлять первым механизмом натяжителя ремня безопасности, а также оценивать столкновение и управлять вторым механизмом натяжителя ремня безопасности.
Как обсуждалось выше, были предложены различные технологии для устройства защиты пассажира транспортного средства, и также может быть рассмотрена защита пассажира транспортного средства с даже большей надежностью за счет объединения этих технологий. Например, в случае, где столкновение было спрогнозировано, может рассматриваться регулировка угла спинки сиденья вместе с управлением механизмом натяжителя ремня безопасности, чтобы применять натяжение к ремню безопасности.
Однако, хотя спинка сиденья может перемещаться в соответствующее состояние перед столкновением посредством прогнозирования столкновения и регулировки спинки сиденья, если, во время этой операции, к ремню безопасности применяется натяжение посредством управляемого механизма натяжителя ремня безопасности, и перемещение спинки сиденья, и применение натяжения к ремню безопасности продолжают выполняться одновременно, нагрузка на электродвигатель, который приводит в движение спинку сиденья или т.п., может увеличиваться, что может вызвать поломку электродвигателя, или чрезмерная нагрузка может прикладываться к пассажиру транспортного средства; таким образом, существует возможность для улучшения.
Сущность изобретения
Первым аспектом изобретения является создание устройства защиты пассажира транспортного средства, содержащего: секцию регулировки сиденья, которая регулирует положение сиденья в предварительно определенное соответствующее положение; секцию регулировки ремня, которая регулирует натяжение ремня безопасности; секцию оценки, которая оценивает, существует или нет необходимость регулировки положения сиденья и натяжения ремня безопасности; и секцию управления, которая управляет секцией регулировки сиденья и секцией регулировки ремня так, чтобы начинать регулировку посредством секции регулировки ремня после того, как регулировка посредством секции регулировки сиденья остановлена, или так, чтобы начинать регулировку посредством секции регулировки ремня после того, как регулировка посредством секции регулировки сиденья началась, и останавливать регулировку посредством секции регулировки сиденья в момент, когда время, когда предварительно определенное натяжение начинает применяться к ремню безопасности из-за регулировки посредством секции регулировки ремня, было достигнуто, в случае, когда было оценено секцией оценки, что существует необходимость регулировки положения сиденья и натяжения ремня безопасности.
Краткое описание чертежей
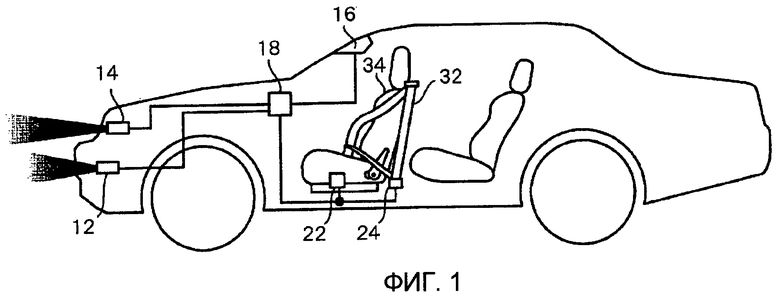
Фиг. 1 - блок-схема, показывающая позицию размещения в транспортном средстве устройства защиты пассажира транспортного средства согласно первому примерному варианту осуществления настоящего изобретения.
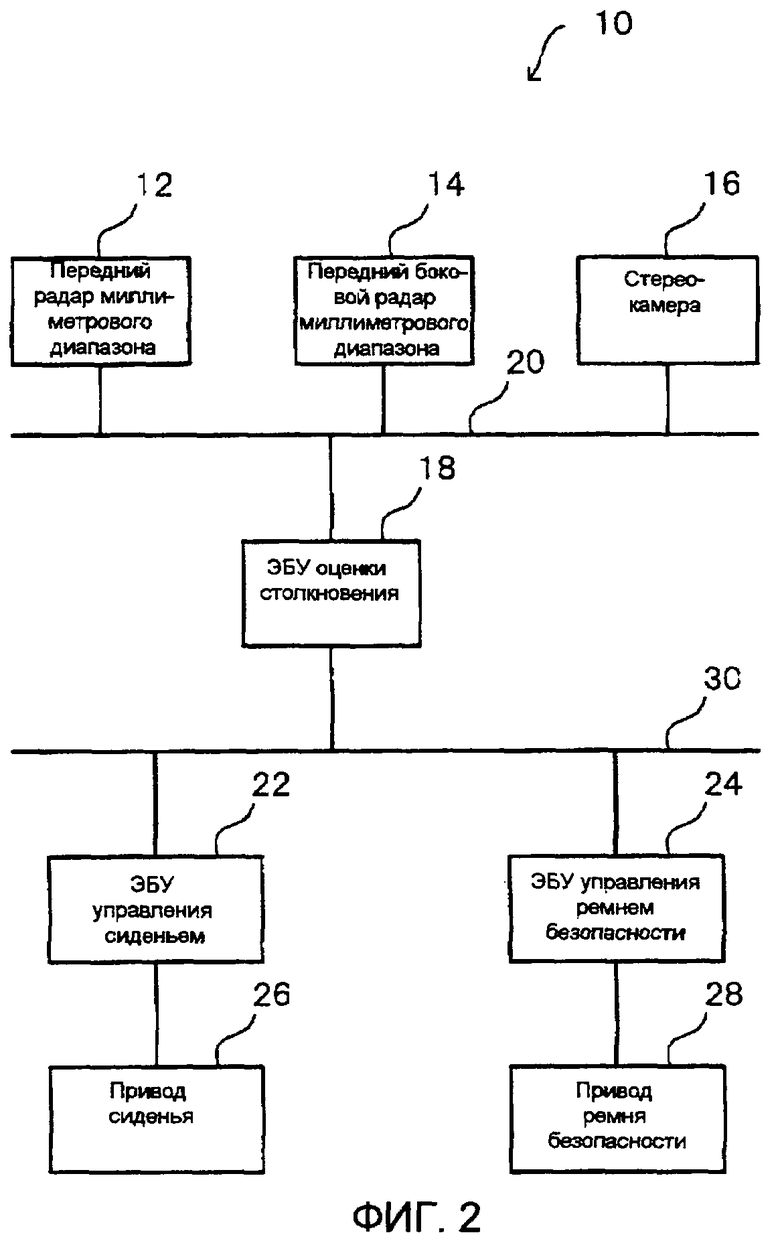
Фиг. 2 - блок-схема, показывающая конфигурацию устройства защиты пассажира транспортного средства согласно первому примерному варианту осуществления настоящего изобретения.
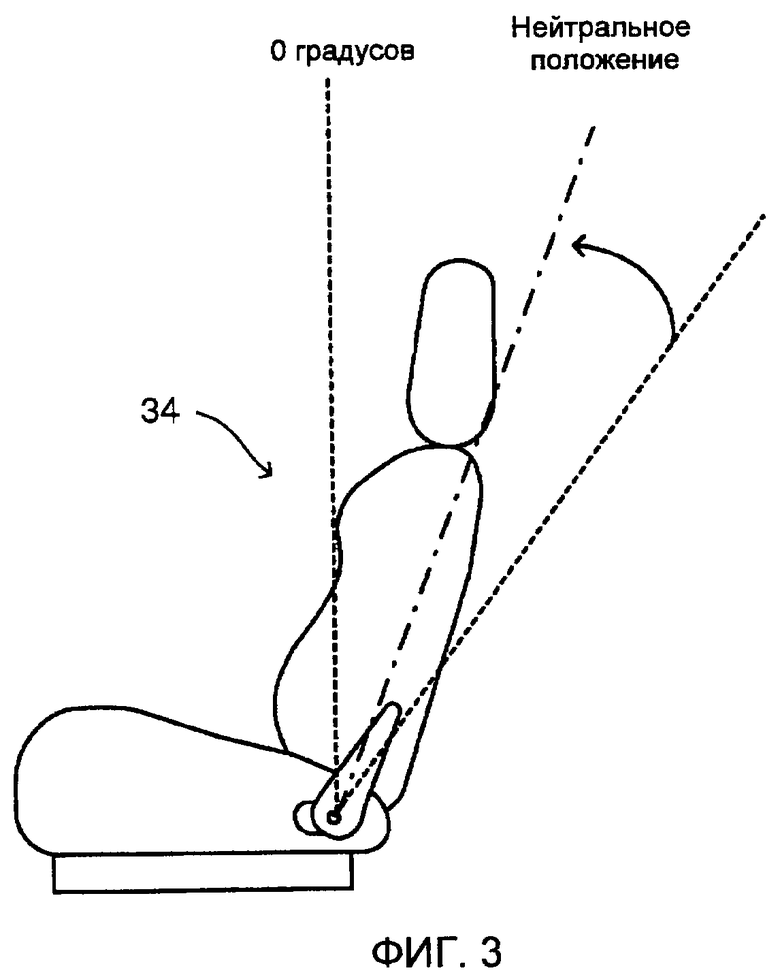
Фиг. 3 - схема для объяснения одного примера соответствующего положения сиденья.
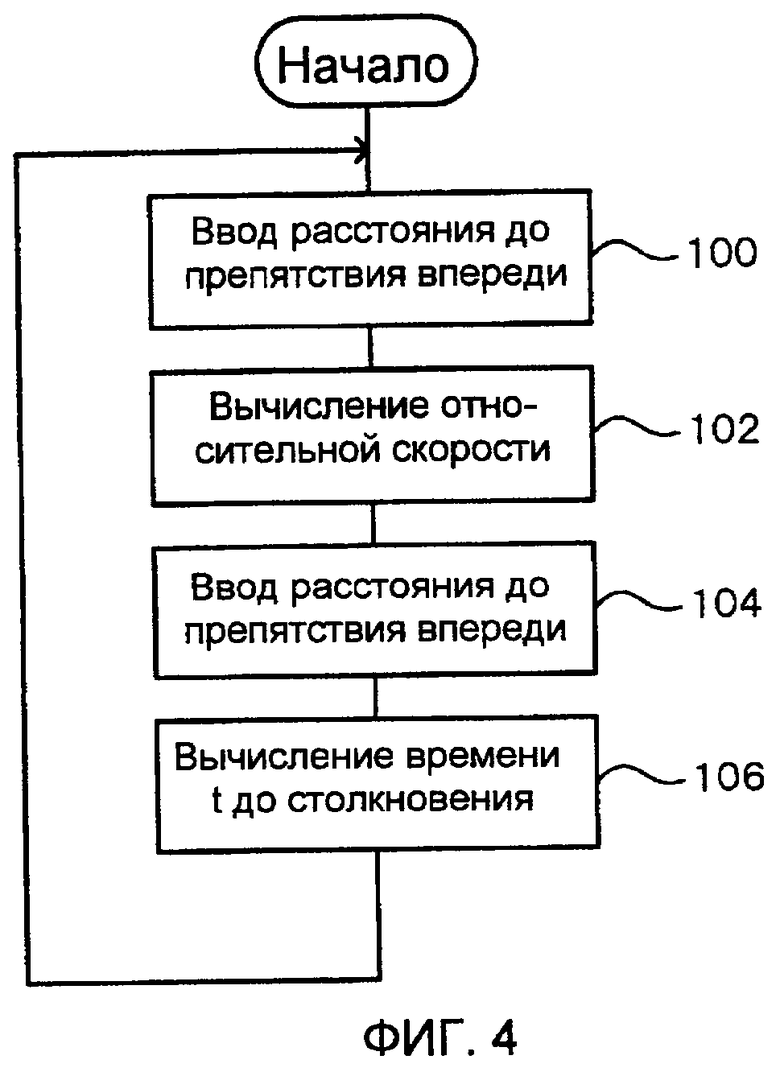
Фиг. 4 - блок-схема, показывающая один пример последовательности обработки, которая выполняется в ЭБУ оценки столкновения устройства защиты пассажира транспортного средства согласно первому примерному варианту осуществления настоящего изобретения.
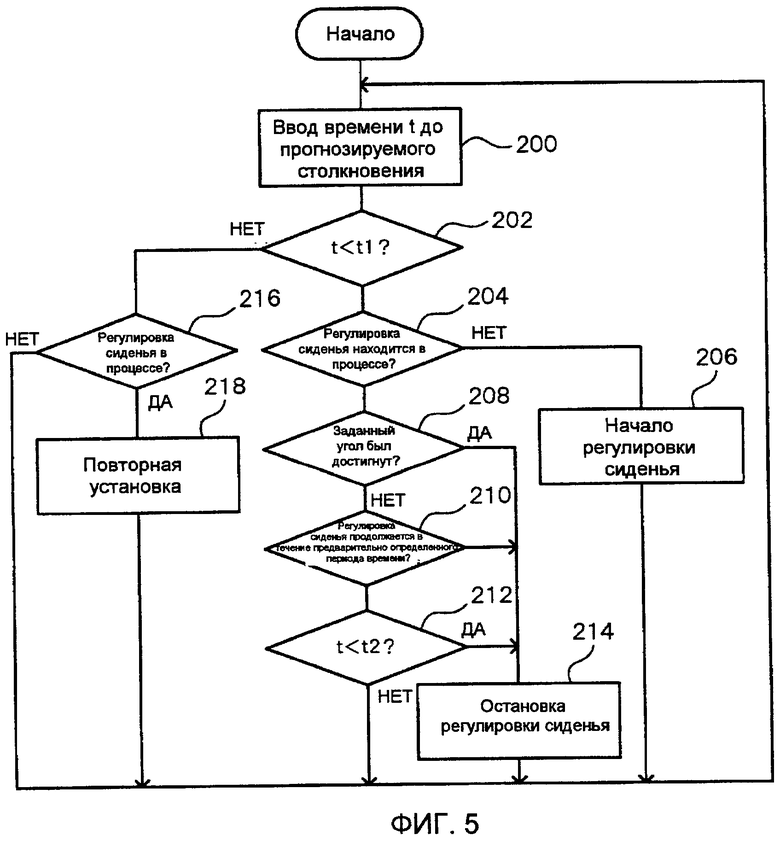
Фиг. 5 - блок-схема, показывающая один пример последовательности обработки, которая выполняется в ЭБУ управления сиденьем устройства защиты пассажира транспортного средства согласно первому примерному варианту осуществления настоящего изобретения.
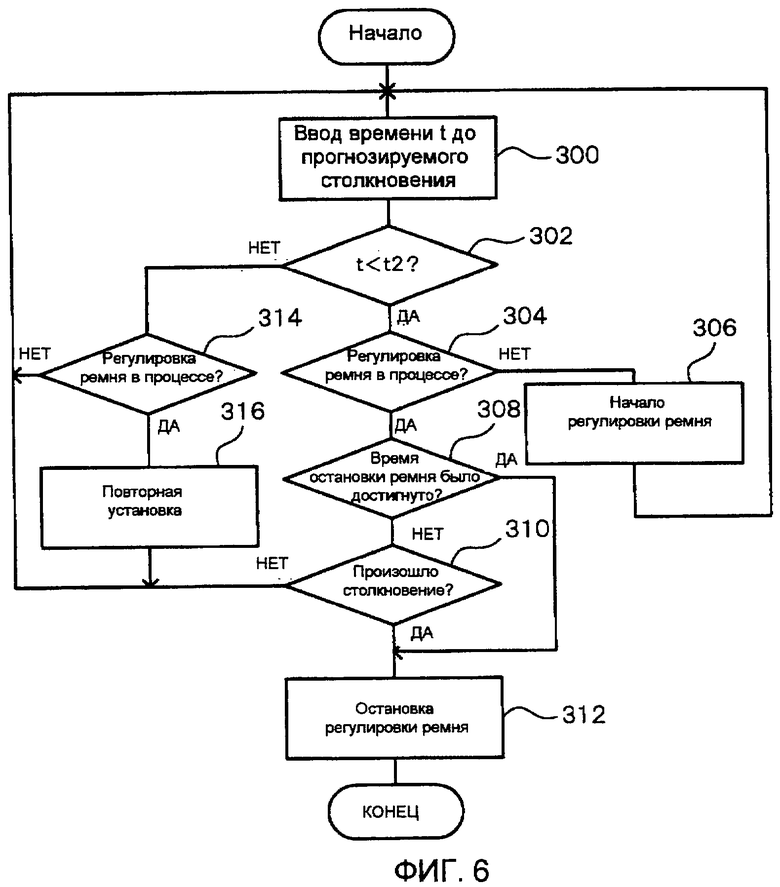
Фиг. 6 - блок-схема, показывающая один пример последовательности обработки, которая выполняется в ЭБУ управления ремнем безопасности устройства защиты пассажира транспортного средства согласно первому примерному варианту осуществления настоящего изобретения.
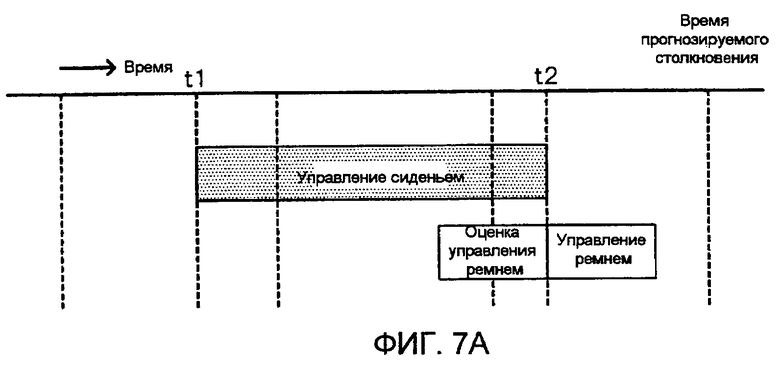
Фиг. 7A - блок-схема для объяснения момента начала регулировки сиденья и регулировки ремня безопасности устройства защиты пассажира транспортного средства согласно первому примерному варианту осуществления настоящего изобретения.
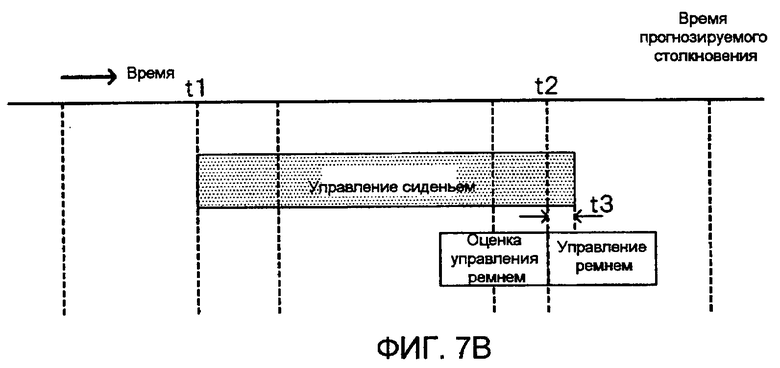
Фиг. 7B - схема, показывающая случай, где момент остановки сиденья был изменен.
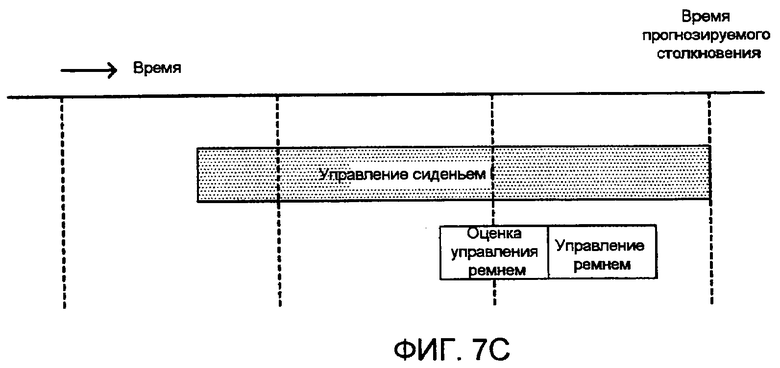
Фиг. 7C - схема, показывающая случай, где регулировка ремня безопасности начинается без завершения регулировки сиденья, и регулировка выполняется одновременно.
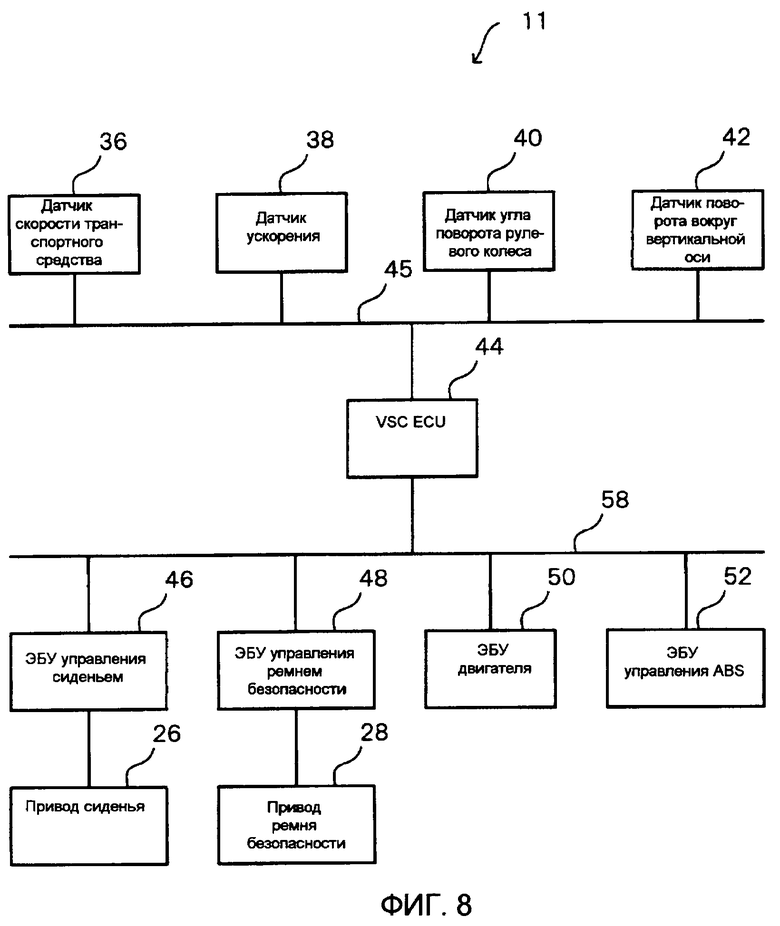
Фиг. 8 - блок-схема, показывающая конфигурацию устройства защиты пассажира транспортного средства согласно второму примерному варианту осуществления настоящего изобретения.
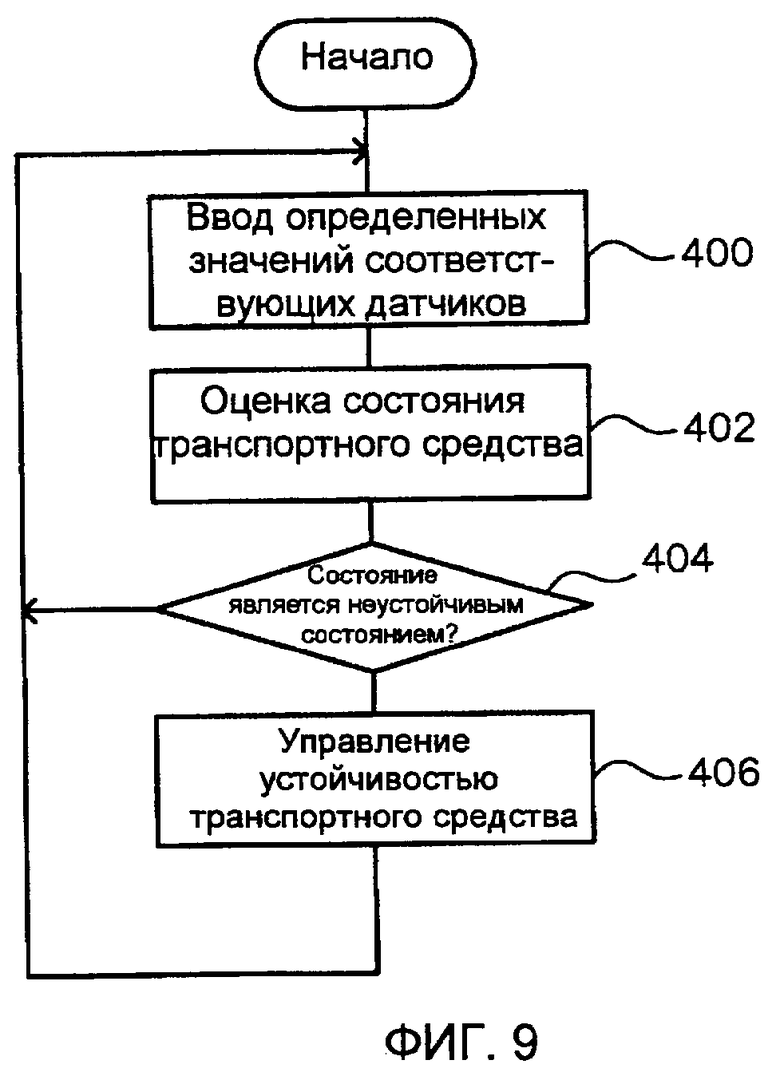
Фиг. 9 - блок-схема, показывающая один пример последовательности обработки, которая выполняется в VSC ЭБУ устройства защиты пассажира транспортного средства согласно второму примерному варианту осуществления настоящего изобретения.
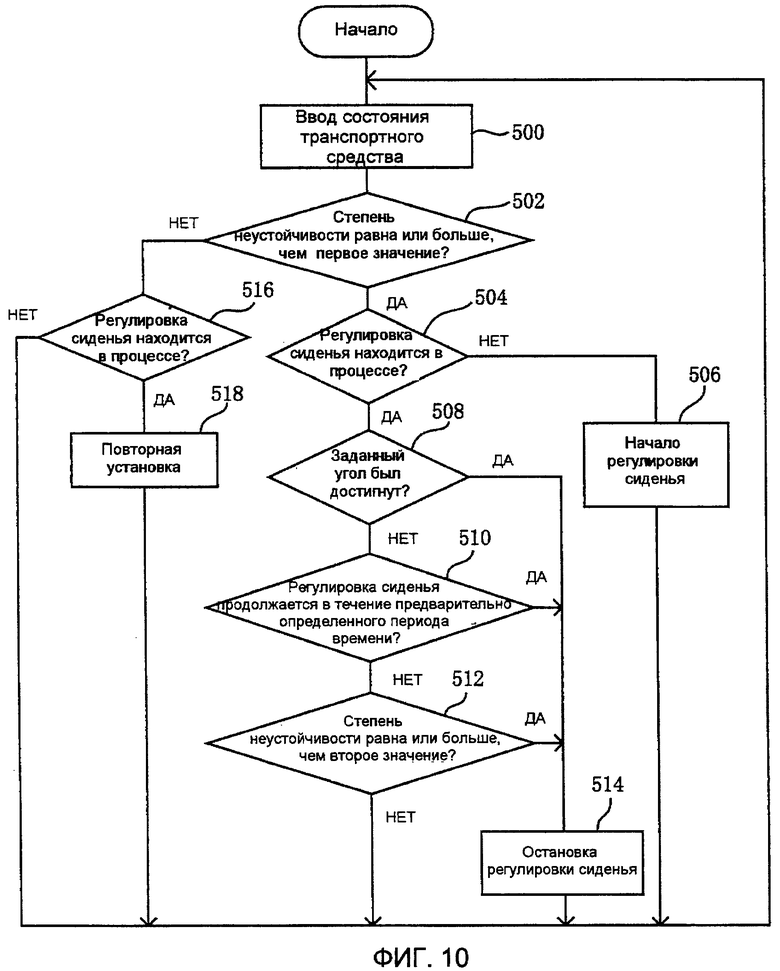
Фиг. 10 - блок-схема, показывающая один пример последовательности обработки, которая выполняется в ЭБУ управления сиденьем устройства защиты пассажира транспортного средства согласно второму примерному варианту осуществления настоящего изобретения.
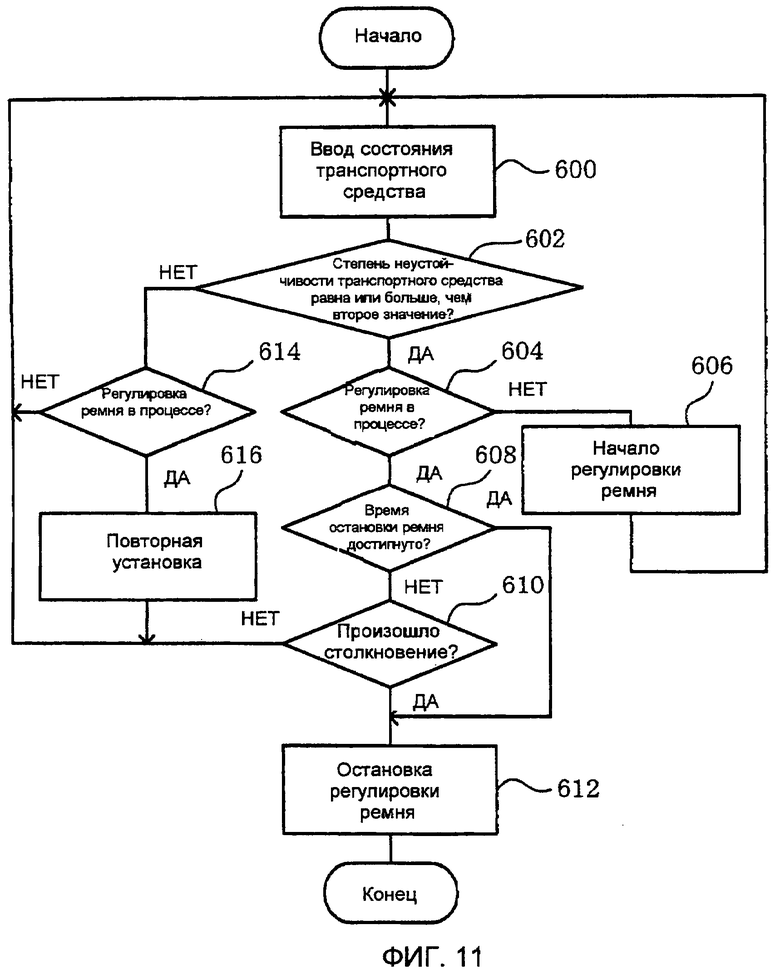
Фиг. 11 - блок-схема, показывающая один пример последовательности обработки, которая выполняется в ЭБУ управления ремнем безопасности устройства защиты пассажира транспортного средства согласно второму примерному варианту осуществления настоящего изобретения.
Наилучший способ осуществления изобретения
Один пример из примерных вариантов осуществления настоящего изобретения будет описан подробно далее со ссылкой на чертежи.
(Первый примерный вариант осуществления)
Фиг. 1 представляет собой блок-схему, показывающую позицию размещения в транспортном средстве устройства защиты пассажира транспортного средства согласно первому примерному варианту осуществления настоящего изобретения, а фиг. 2 - блок-схему, показывающую конфигурацию устройства защиты пассажира транспортного средства согласно первому примерному варианту осуществления настоящего изобретения.
Как показано на фиг. 1 и 2, устройство 10 защиты пассажира транспортного средства согласно первому примерному варианту осуществления настоящего изобретения содержит передний радар 12-миллиметрового диапазона для определения расстояния до препятствия впереди, передний боковой радар 14-миллиметрового диапазона для определения расстояния до препятствия спереди сбоку, стереокамеру 16, которая фотографирует вперед, и ЭБУ (электронный блок управления) 18 оценки столкновения, и каждое устройство соединено с шиной 20 системы наблюдения периметра. Передний радар 12-миллиметрового диапазона, передний боковой радар 14-миллиметрового диапазона и стереокамера 16, которые соединены с шиной 20 системы наблюдения периметра, наблюдают за периметром транспортного средства и выводят результаты наблюдения в ЭБУ 18 оценки столкновения.
Передний радар 12-миллиметрового диапазона предусмотрен вблизи от центра передней решетки. Дополнительно передний боковой радар 14-миллиметрового диапазона предусмотрен в области обеих сторон в направлении ширины транспортного средства с внутренней стороны бампера. Кроме того, передний радар 12-миллиметрового диапазона и передний боковой радар 14-миллиметрового диапазона предусмотрены для соответствующего приема радиоволн, которые отражаются обратно от объекта из-за излучения миллиметровых волн в переднем направлении транспортного средства и переднем боковом направлении, и для измерения расстояния до объекта, относительной скорости по отношению к транспортному средству и т.п. на основе времени распространения, разности частот, сформированной из-за эффекта Доплера или т.п.
Стереокамера 16 предусмотрена в области центра в верхней части переднего ветрового стекла. Стереокамера 16 предусмотрена для фотографирования в переднем направлении транспортного средства, чтобы обнаруживать препятствие в периметре и измерять расстояние до препятствия. В этой связи следует отметить, что может быть предусмотрена конфигурация, в которой стереокамера 16 пропущена.
ЭБУ 18 оценки столкновения получает результаты определения переднего радара 12-миллиметрового диапазона, переднего бокового радара 14-миллиметрового диапазона и стереокамеры 16 и выполняет прогнозирование столкновения. Относительно прогнозирования столкновения к нему могут применяться различные известные способы, и, таким образом, его объяснение будет опущено.
Также устройство 10 защиты пассажира транспортного средства согласно первому примерному варианту осуществления настоящего изобретения дополнительно содержит ЭБУ 22 управления сиденьем, который регулирует положение сиденья 34, и ЭБУ 24 управления ремнем безопасности, который регулирует натяжение ремня 32 безопасности. ЭБУ 22 управления сиденьем и ЭБУ 24 управления ремнем безопасности, каждый, соединен с системной шиной 30 транспортного средства, и ЭБУ 18 оценки столкновения дополнительно соединен с системной шиной 30 транспортного средства.
Привод 26 сиденья для регулировки соответствующих положений сиденья 34 соединен с ЭБУ 22 управления сиденьем. В случае, если столкновение было спрогнозировано, ЭБУ 18 оценки столкновения управляет работой привода 26 сиденья, чтобы регулировать наклон сиденья, и регулирует положение сиденья 34 в предварительно определенное соответствующее положение (соответствующий диапазон) перед столкновением. Как показано на фиг. 3, в настоящем примерном варианте осуществления угол спинки сиденья, т.е. наклон, регулируется так, чтобы находиться в предварительно определенном нейтральном положении.
Дополнительно в случае, когда изменение положения сиденья 34 было инструктировано неиллюстрированным переключателем или т.п., ЭБУ 22 управления сиденьем управляет приводом 26 сиденья, чтобы изменять положение сиденья 34, например, сдвиг сиденья, наклон или т.п., в соответствии с рабочим положением переключателя. В этой связи следует отметить, что в случае, когда привод 26 сиденья приводится в действие от манипуляций с переключателем, и в случае, когда привод 26 сиденья приводится в действие, когда столкновение было спрогнозировано, ЭБУ 22 управления сиденьем управляет приводом 26 сиденья с разными скоростями. Кроме того, в случае, когда привод 26 сиденья приводится в действие, если столкновение было спрогнозировано, для того чтобы немедленно отрегулировать сиденье 34 в подходящее положение, ЭБУ 22 управления сиденьем приводит в действие привод 26 сиденья так, чтобы регулировать положение сиденья 34 со скоростью, которая выше, чем в случае, где привод 26 сиденья приводится в действие от манипуляций с переключателем.
С другой стороны, привод 28 ремня безопасности для выполнения операции сматывания ремня 32 безопасности соединен с ЭБУ 24 управления ремнем безопасности. В случае, когда столкновение было спрогнозировано ЭБУ 18 оценки столкновения, ЭБУ 24 управления сиденьем управляет работой привода 28 ремня безопасности, чтобы регулировать натяжение ремня 32 безопасности.
В этой связи в случае, когда столкновение было спрогнозировано, если регулировка сиденья 34 и регулировка ремня 32 безопасности выполняются одновременно, нагрузка на привод 26 сиденья для выполнения регулировки сиденья 34 увеличивается, и нагрузка на пассажира транспортного средства увеличивается. В этом отношении в настоящем примерном варианте осуществления в случае, где столкновение было спрогнозировано, работа привода 26 сиденья начинается посредством ЭБУ 22 управления сиденьем в момент, когда время до столкновения становится предварительно определенным временем t1, а работа привода 28 ремня безопасности начинается посредством ЭБУ 24 управления ремнем безопасности в момент, когда время до столкновения становится предварительно определенным временем t2 (t1>t2). Дополнительно ЭБУ 22 управления сиденьем останавливает работу привода 26 сиденья в момент, когда было достигнуто время t2 или время t3 (t1>t2>t3), когда привод 28 ремня безопасности работает так, что предварительно определенное натяжение начинает применяться к ремню 32 безопасности.
Далее обработка соответствующих ЭБУ устройства 10 защиты пассажира транспортного средства согласно первому примерному варианту осуществления настоящего изобретения, которое сконфигурировано, как описано выше, будет описана более подробно.
Сначала будет описана обработка, которая выполняется в ЭБУ 18 оценки столкновения. Фиг. 4 - это блок-схема, показывающая один пример последовательности обработки, которая выполняется в ЭБУ 18 оценки столкновения устройства 10 защиты пассажира транспортного средства согласно первому примерному варианту осуществления настоящего изобретения. В этой связи следует отметить, что обработка на фиг. 4 будет пояснена как обработка, которая начинается, когда переключатель зажигания включается, и заканчивается, когда переключатель зажигания выключается, или транспортное средство сталкивается.
На этапе 100 вводится расстояние до препятствия впереди, и последовательность операций переключается на этап 102. Иначе говоря, вводятся результаты определения переднего радара 12-миллиметрового диапазона, переднего бокового радара 14-миллиметрового диапазона, стереокамеры 16 и т.п.
На этапе 102 вычисляется относительная скорость, и последовательность операций переключается на этап 104. Например, относительная скорость вычисляется из расстояний до препятствия впереди, которое обнаруживается миллиметровым радаром в каждый предварительно определенный период времени. В этой связи следует отметить, что может быть предоставлена конфигурация, в которой получается расстояние и вычисляется относительная скорость за счет обработки изображения результатов фотографирования стереокамеры 16.
На этапе 104 результаты определения миллиметрового радара вновь вводятся, и последовательность операций переключается на этап 106.
На этапе 106 вычисляется время t до столкновения, последовательность операций возвращается к этапу 100, и вышеописанная обработка повторяется. Т.е. время t до столкновения вычисляется из расстояния до препятствия впереди, которое обнаружено передним датчиком 12-миллиметрового диапазона, передним боковым датчиком 14-миллиметрового диапазона, стереокамерой 16 и т.п., и из относительной скорости, которая была вычислена на этапе 102, последовательность операций возвращается к этапу 100, и вышеописанная обработка повторяется.
Далее будет пояснена обработка, которая выполняется в ЭБУ 22 управления сиденьем. Фиг. 5 представляет собой блок-схему, показывающую один пример последовательности обработки, которая выполняется в ЭБУ 22 управления сиденьем устройства 10 защиты пассажира транспортного средства согласно первому примерному варианту осуществления настоящего изобретения. В этой связи следует отметить, что обработка на фиг. 5 будет пояснена как обработка, которая начинается, когда переключатель зажигания включается, и заканчивается, когда переключатель зажигания выключается, или транспортное средство сталкивается.
На этапе 200 вводится время t прогнозирования столкновения, которое было вычислено ЭБУ 18 оценки столкновения, и последовательность операций переключается на этап 202.
На этапе 202 определяется, стало или нет время t до прогнозируемого столкновения меньше, чем предварительно определенное время t1. В случае, когда определение является утвердительным, последовательность операций переключается на этап 204, а в случае, когда определение отрицательно, последовательность операций переключается на этап 216.
На этапе 204 определяется, регулируется или нет сиденье в текущий момент. В этом определении определяется, достигнуто ли уже или нет время, меньшее, чем время t1 до столкновения, и работает ли привод 26 сиденья. В случае, когда определение является отрицательным, последовательность операций переключается на этап 206, а в случае, когда определение положительно, последовательность операций переключается на этап 208.
На этапе 206 регулировка сиденья начинается вследствие работы запускаемого привода 26 сиденья, и последовательность операций возвращается к этапу 200. Т.е. угол спинки сиденья регулируется в предварительно определенный угол (диапазон угла).
Дополнительно на этапе 208, определяется, был ли достигнут или нет заданный угол, т.е. предварительно определенный угол спинки сиденья. В случае, когда определение является отрицательным, последовательность операций переключается на этап 210, а в случае, когда определение положительно, последовательность операций переключается на этап 214. В этой связи следует отметить, что для определения того, был или нет достигнут заданный угол, определение может выполняться из величины срабатывания привода 26 сиденья, и может быть предоставлена конфигурация, в которой предусмотрен датчик, который определяет угол наклона, чтобы выполнять определение согласно определенному значению датчика, или может быть предоставлена конфигурация, в которой предусмотрен ограничивающий переключатель при предварительно определенном соответствующем угле, и определяется, был или нет включен переключатель.
На этапе 210 определяется, происходит или нет регулировка сиденья в течение предварительно определенного периода времени. В этом определении устанавливается предварительно определенный период времени для недопущения продолжения регулировки сиденья после столкновения и определяется, прошел или нет предварительно определенный период времени. В случае, когда определение является утвердительным, последовательность операций переключается на этап 214, а в случае, когда определение отрицательно, последовательность операций переключается на этап 212.
На этапе 212 определяется, стало или нет время t до прогнозируемого столкновения меньше, чем предварительно определенное время t2. В случае, когда определение является утвердительным, последовательность операций переключается на этап 214, а в случае, когда определение отрицательно, последовательность операций возвращается к этапу 200, и вышеописанная обработка повторяется. В этой связи следует отметить, что на этапе 212 может быть предоставлена конфигурация, в которой определяется, было ли достигнуто или нет время t3, когда привод 28 ремня безопасности работает так, что предварительно определенное натяжение начинает применяться к ремню 32 безопасности (фиг. 7B).
На этапе 214 регулировка сиденья останавливается, последовательность операций возвращается к этапу 200, и вышеописанная обработка повторяется.
С другой стороны, когда определение на этапе 202 отрицательно, и последовательность операций переключается к этапу 216, определяется, регулируется ли сиденье в настоящий момент или нет. Т.е. определяется, работает ли уже привод 26 сиденья или нет. В случае, где определение является утвердительным, последовательность операций переключается на этап 218, а в случае, где определение отрицательно, последовательность операций возвращается к этапу 200, и вышеописанная обработка повторяется.
На этапе 218, поскольку регулировка сиденья выполняется вследствие работы привода 26 сиденья, выполняется перенастройка, чтобы останавливать работу привода 26 сиденья, последовательность операций возвращается к этапу 200, и вышеописанная обработка повторяется. В этой связи следует отметить, что может быть предоставлена конфигурация, в которой в качестве перенастройки привод 26 сиденья работает так, чтобы вернуть сиденье в положение перед срабатыванием привода 26 сиденья.
Далее будет пояснена последовательность обработки, которая выполняется в ЭБУ 24 управления ремнем безопасности. Фиг. 6 представляет собой блок-схему, показывающую один пример последовательности обработки, которая выполняется в ЭБУ 24 управления ремнем безопасности устройства 10 защиты пассажира транспортного средства согласно первому примерному варианту осуществления настоящего изобретения. В этой связи следует отметить, что обработка на фиг. 6 будет пояснена как обработка, которая начинается, когда переключатель зажигания включен.
На этапе 300 вводится время t до прогнозируемого столкновения, которое было вычислено ЭБУ 18 оценки столкновения, и последовательность операций переключается на этап 302.
На этапе 302 определяется, стало ли меньше или нет время t до прогнозируемого столкновения, чем предварительно определенное время t2. В случае, когда определение является утвердительным, последовательность операций переключается на этап 304, а в случае, когда определение отрицательно, последовательность операций переключается на этап 314.
На этапе 304 определяется, регулируется или нет ремень безопасности в текущий момент. В этом определении определяется, достигнуто ли уже или нет время, меньшее, чем время t2 до столкновения, и работает ли привод 28 ремня безопасности. В случае, когда определение является отрицательным, последовательность операций переключается на этап 306, а в случае, когда определение положительно, последовательность операций переключается на этап 308.
На этапе 306 регулировка ремня безопасности начинается вследствие работы запускаемого привода 28 ремня безопасности, и последовательность операций возвращается к этапу 300. Т.е. натяжение применяется к ремню 32 безопасности.
Дополнительно на этапе 308 определяется, достигнуто или нет предварительно определенное время остановки ремня (время от начала регулировки ремня до момента, когда достигнуто желаемое натяжение). В случае, когда определение является отрицательным, последовательность операций переключается на этап 310, а в случае, когда определение положительно, последовательность операций переключается на этап 312.
На этапе 310 определяется, произошло ли столкновение или нет. В этом определении определяется, достигнуто или нет время прогнозируемого столкновения, или определяется, обнаружено или нет столкновение датчиком столкновения, таким как неиллюстрированный датчик в бампере, датчик ускорения или т.п. В случае, когда определение является утвердительным, последовательность операций переключается на этап 312, а в случае, когда определение отрицательно, последовательность операций возвращается к этапу 300, и вышеописанная обработка повторяется.
На этапе 312 работа привода 28 ремня безопасности останавливается, регулировка ремня останавливается, и последовательность обработки заканчивается.
С другой стороны, когда определение на этапе 302 отрицательно, и последовательность операций переключается на этап 314, определяется, регулируется ли ремень в настоящий момент или нет. Т.е. определяется, работает ли уже привод 28 ремня безопасности или нет. В случае, где определение является утвердительным, последовательность операций переключается на этап 316, а в случае, где определение отрицательно, последовательность операций возвращается к этапу 300, и вышеописанная обработка повторяется.
На этапе 316, поскольку регулировка ремня безопасности выполняется вследствие работы привода 28 ремня безопасности, повторная установка выполняется, чтобы остановить работу привода 28 ремня безопасности, последовательность операций возвращается к этапу 300, и вышеописанная обработка повторяется.
Т.е. в устройстве 10 защиты пассажира транспортного средства согласно первому примерному варианту осуществления настоящего изобретения, как показано на фиг. 7A и 7B, регулировка сиденья 34 начинается в момент, когда время до прогнозируемого столкновения становится t1, а регулировка ремня 32 безопасности начинается в момент, когда время до прогнозируемого столкновения становится t2. Дополнительно регулировка сиденья 34 останавливается в момент, когда время до прогнозируемого столкновения становится t2 или t3, когда привод 28 ремня безопасности работает так, что предварительно определенное натяжение начинает применяться к ремню 32 безопасности. В результате не допускается ситуация, в которой регулировка сиденья 34 и регулировка ремня 32 безопасности продолжают одновременно выполняться до тех пор, пока не происходит поломка, и может быть предотвращена ситуация, в которой нагрузка на привод 26 сиденья для выполнения регулировки сиденья 34 увеличивается, что может вызывать поломку, или в которой чрезмерная нагрузка прикладывается к пассажиру транспортного средства.
Дополнительно в настоящем примерном варианте осуществления в случае, где столкновение было спрогнозировано, поскольку регулировка сиденья выполняется со скоростью, которая выше, чем скорость регулировки сиденья при управлении пассажиром транспортного средства, может быть предотвращена ситуация, как показано на фиг. 7C, в которой регулировка ремня безопасности начинается без завершения регулировки сиденья и обе регулировки продолжают одновременно выполняться до тех пор, пока не произойдет поломка, или в которой чрезмерная нагрузка прикладывается к пассажиру транспортного средства.
В этой связи следует отметить, что в зависимости от величины регулировки сиденья 34, поскольку регулировка в соответствующее положение заканчивается немедленно, даже если предоставляется конфигурация, в которой обработка определения остановки регулировки сиденья (этап 212) пропущена, и регулировка ремня 32 безопасности выполняется как раз после начала регулировки сиденья, представляется возможным предотвратить ситуацию, в которой регулировка сиденья 34 и регулировка ремня 32 безопасности продолжают одновременно выполняться и происходит поломка или в которой чрезмерная нагрузка прикладывается к пассажиру транспортного средства, тем же образом, что и в вышеописанном примерном варианте осуществления.
Более того, выполняя регулировку ремня 32 безопасности после регулировки сиденья 34 в соответствующее положение, натяжение ремня 32 безопасности может быть применено к пассажиру транспортного средства в соответствующей позе при езде, и, следовательно, защита пассажира транспортного средства ремнем 32 безопасности может выполняться должным образом.
(Второй примерный вариант осуществления)
Далее будет объяснено устройство защиты пассажира транспортного средства согласно второму примерному варианту осуществления настоящего изобретения. Фиг. 8 представляет собой блок-схему, показывающую конфигурацию устройства 11 защиты пассажира транспортного средства согласно второму примерному варианту осуществления настоящего изобретения.
В первом примерном варианте осуществления была предоставлена конфигурация, в которой столкновение прогнозируется, и регулировка сиденья и регулировка ремня безопасности выполняются в соответствии со временем до столкновения, а в настоящем примерном варианте осуществления регулировка сиденья и регулировка ремня безопасности выполняются в соответствии со степенью неустойчивости транспортного средства. Конкретно предоставляется конфигурация, в которой используется система VSC (управление устойчивостью (стабильностью движения) транспортного средства), оценивается состояние движения транспортного средства, и регулировка сиденья и регулировка ремня безопасности выполняются в соответствии с результатами оценки. Более подробно предоставляется конфигурация, в которой, в случае, когда состояние транспортного средства (степень неустойчивости) принимает первое значение (например, условием, из-за которого начинается управление посредством VSC-системы, таким как состояние скольжения или т.п.), начинается регулировка сиденья, а в случае, когда состояние транспортного средства принимает второе значение (например, значение, представляющим состояние заноса или состояние вращения или т.п.), начинается регулировка ремня безопасности.
Как показано на фиг. 8, устройство 11 защиты пассажира транспортного средства согласно второму примерному варианту осуществления настоящего изобретения содержит датчик 36 скорости транспортного средства, датчик 38 ускорения, датчик 40 угла поворота рулевого колеса, датчик 42 скорости поворота вокруг вертикальной оси и VSC ЭБУ 44, и каждый датчик соединен с шиной 45 определения состояния транспортного средства. Результаты определения соответствующих датчиков, которые соединены с шиной 45 определения состояния транспортного средства, выводятся в VSC ЭБУ 44.
Датчик 36 скорости транспортного средства определяет скорость движения транспортного средства. Датчик 38 ускорения определяет ускорение в соответствующих направлениях, которое применяется к транспортному средству. Датчик 40 угла поворота рулевого колеса определяет угол поворота рулевого колеса. Дополнительно датчик 42 скорости поворота вокруг вертикальной оси определяет скорость поворота вокруг вертикальной оси, которая формируется в транспортном средстве.
Также устройство 11 защиты пассажира транспортного средства согласно второму примерному варианту осуществления настоящего изобретения дополнительно содержит ЭБУ 46 управления сиденьем, который регулирует положение сиденья, ЭБУ 48 управления ремнем безопасности, который регулирует натяжение ремня безопасности, ЭБУ 50 двигателя, который управляет двигателем, и ЭБУ 52 управления ABS, который управляет ABS (антиблокировочной тормозной системой). Каждый из них соединен с системной шиной 58 транспортного средства, и VSC ЭБУ 44 соединен с системной шиной 58 транспортного средства.
ЭБУ 50 двигателя управляет работой двигателя в соответствии с определенными значениями соответствующих датчиков (например, датчика температуры воздуха, датчика положения дроссельной заслонки, вакуумного датчика, датчика температуры воды и т.п.), которые предусмотрены для управления двигателем, а ЭБУ 52 управления ABS управляет работой тормоза.
Т.е. степень неустойчивости транспортного средства оценивается посредством VSC ЭБУ 44 и управляющим двигателем ЭБУ 50, ЭБУ 52 управления ABS и т.п. в соответствии с результатами оценки, положение транспортного средства управляется так, чтобы оно становилось подходящим положением. В этой связи следует отметить, что относительно VSC могут применяться различные известные способы, и, таким образом, подробное их описание будет опущено. Дополнительно в настоящем примерном варианте осуществления, хотя применяется конфигурация, в которой двигатель и тормоз обозначены как объекты управления, чтобы управлять положением транспортного средства, изобретение не ограничено этим, и могут применяться различные способы.
Привод 26 сиденья для регулировки положения сиденья соединен с ЭБУ 46 управления сиденьем. ЭБУ 46 управления сиденьем управляет работой привода 26 сиденья и регулирует наклон сиденья или сдвиг сиденья, чтобы регулировать в предварительно определенное соответствующее положение (соответствующий диапазон), в соответствии со степенью неустойчивости транспортного средства, которая была оценена посредством VSC ЭБУ 44. Например, тем же образом, что и в первом примерном варианте осуществления, угол спинки сиденья, т.е. наклон, регулируется так, чтобы он был в предварительно определенном нейтральном положении, как показано на фиг. 3.
Дополнительно в случае, где изменение положения сиденья было инструктировано неиллюстрированным переключателем или т.п., ЭБУ 46 управления сиденьем управляет приводом 26 сиденья, чтобы изменять положение сиденья, например сдвиг сиденья, наклон или т.п., в соответствии с рабочим положением переключателя. В этой связи следует отметить, что в случае, когда привод 26 сиденья приводится в действие от манипуляций с переключателем, и в случае, когда привод 26 сиденья приводится в действие в соответствии со степенью неустойчивости транспортного средства, ЭБУ 46 управления сиденьем управляет приводом 26 сиденья с разными скоростями. В случае, когда привод 26 сиденья приводится в действие в соответствии со степенью неустойчивости транспортного средства, для того чтобы немедленно отрегулировать сиденье в подходящее положение, ЭБУ 46 управления сиденьем приводит в действие привод 26 сиденья так, чтобы регулировать положение сиденья со скоростью, которая выше, чем в случае, когда привод 26 сиденья приводится в действие от манипуляций с переключателем.
Привод 28 ремня безопасности для выполнения операции подтягивания ремня 32 безопасности соединен с ЭБУ 48 управления ремнем безопасности, и в случае, когда степень неустойчивости транспортного средства согласно VSC ЭБУ 44 становится предварительно определенным значением, ЭБУ 48 управления ремнем безопасности управляет работой привода 28 ремня безопасности, чтобы регулировать натяжение ремня 32 безопасности.
В настоящем примерном варианте осуществления также, если регулировка сиденья и регулировка ремня безопасности выполняются одновременно, нагрузка на привод 26 сиденья для выполнения регулировки сиденья увеличивается, и нагрузка на пассажира транспортного средства увеличивается тем же образом, что и в первом примерном варианте осуществления изобретения. В этом отношении в настоящем примерном варианте осуществления оценивается степень неустойчивости транспортного средства, работа привода 26 сиденья начинается посредством ЭБУ 46 управления сиденьем в момент, когда степень неустойчивости принимает первое значение, а работа привода 28 ремня безопасности начинается посредством ЭБУ 48 управления ремнем безопасности в момент, когда степень неустойчивости транспортного средства принимает второе значение (значение, при котором степень неустойчивости транспортного средства выше, чем при первом значении). Дополнительно ЭБУ 46 управления сиденьем останавливает работу привода 26 сиденья в момент, когда степень неустойчивости транспортного средства принимает второе значение, или в момент, когда было достигнуто время t3, когда привод 28 ремня безопасности работает так, что предварительно определенное натяжение начинает применяться к ремню 32 безопасности.
Далее обработка соответствующих ЭБУ устройства 11 защиты пассажира транспортного средства согласно второму примерному варианту осуществления настоящего изобретения, которое сконфигурировано, как описано выше, будет пояснена подробно.
Сначала будет пояснена обработка, которая выполняется в VSC ЭБУ 44. Фиг. 9 представляет собой блок-схему, показывающую один пример последовательности обработки, которая выполняется в VSC ЭБУ 44 устройства 11 защиты пассажира транспортного средства согласно второму примерному варианту осуществления настоящего изобретения. В этой связи следует отметить, что обработка на фиг. 9 будет пояснена как обработка, которая начинается, когда переключатель зажигания включается, и заканчивается, когда переключатель зажигания выключается.
На этапе 400 вводятся определенные значения соответствующих датчиков (датчика 36 скорости транспортного средства, датчика 38 ускорения, датчика 40 угла поворота рулевого колеса, датчика 42 скорости поворота вокруг вертикальной оси и т.п.), и последовательность операций переключается на этап 402.
На этапе 402 состояние транспортного средства оценивается на основе определенных значений соответствующих датчиков, и последовательность операций переключается на этап 404. В качестве оценки состояния транспортного средства могут применяться различные известные способы, и, например, оценивается состояние (степень неустойчивости) транспортного средства, такое как состояние скольжения, состояние заноса, состояние вращения или т.п.
На этапе 404 определяется, является или нет оцененное состояние транспортного средства неустойчивым состоянием. В случае, когда определение является утвердительным, последовательность операций переключается на этап 406, а в случае, когда определение отрицательно, последовательность операций возвращается к этапу 400, и вышеописанная обработка повторяется.
На этапе 406 выполняется управление устойчивостью транспортного средства, последовательность операций возвращается к этапу 400, и вышеописанная обработка повторяется. Т.е. ЭБУ 50 двигателя, ЭБУ 52 управления ABS и т.п. управляются, чтобы выполнять управление так, что положение транспортного средства стабилизируется.
Далее будет пояснена обработка, которая выполняется в ЭБУ 46 управления сиденьем. Фиг. 10 представляет собой блок-схему, показывающую один пример последовательности обработки, которая выполняется в ЭБУ 46 управления сиденьем устройства 11 защиты пассажира транспортного средства согласно второму примерному варианту осуществления настоящего изобретения. В этой связи следует отметить, что обработка на фиг. 10 будет пояснена как обработка, которая начинается, когда переключатель зажигания включается, и заканчивается, когда переключатель зажигания выключается.
На этапе 500 вводится состояние транспортного средства, которое было оценено посредством VSC ЭБУ 44, и последовательность операций переключается на этап 502.
На этапе 502 определяется, равна ли или больше степень неустойчивости транспортного средства, чем первое значение. В этом определении определяется, например, возникло или нет состояние скольжения или состояние заноса, в качестве первого значения. В случае, когда определение является утвердительным, последовательность операций переключается на этап 504, а в случае, когда определение отрицательно, последовательность операций переключается на этап 516.
На этапе 504 определяется, регулируется или нет сиденье в текущий момент. В этом определении определяется, стала или нет степень неустойчивости транспортного средства равной или большей, чем первое значение, и работает ли привод 26 сиденья. В случае, когда определение является отрицательным, последовательность операций переключается на этап 506, а в случае, когда определение положительно, последовательность операций переключается на этап 508.
На этапе 506 регулировка сиденья начинается вследствие работы запускаемого привода 26 сиденья, и последовательность операций возвращается к этапу 500. Т.е. угол спинки сиденья регулируется в предварительно определенный угол (диапазон угла).
Дополнительно на этапе 508, определяется, был ли достигнут или нет заданный угол, т.е. предварительно определенный угол спинки сиденья. В случае, когда определение является отрицательным, последовательность операций переключается на этап 510, а в случае, когда определение положительно, последовательность операций переключается на этап 514. В этой связи следует отметить, что для определения того, был или нет достигнут заданный угол, определение может выполняться из величины срабатывания привода 26 сиденья, и может быть предоставлена конфигурация, в которой предусмотрен датчик, который определяет угол наклона, чтобы выполнять определение согласно определенному значению датчика, или может быть предоставлена конфигурация, в которой предусмотрен ограничивающий переключатель при предварительно определенном соответствующем угле, и определяется, был или нет включен переключатель.
На этапе 510 определяется, происходит или нет регулировка сиденья в течение предварительно определенного периода времени. В этом определении устанавливается предварительно определенный период времени для недопущения продолжения регулировки сиденья после того, как транспортное средство становится неустойчивым и происходит столкновение, и определяется, прошел или нет предварительно определенный период времени. В случае, когда определение является утвердительным, последовательность операций переключается на этап 514, а в случае, когда определение отрицательно, последовательность операций переключается на этап 512.
На этапе 512 определяется, стала или нет степень неустойчивости транспортного средства равной или большей, чем второе значение. В этом определении определяется, например, перешло или нет состояние скольжения или состояние заноса в состояние вращения или т.п., в качестве второго значения. В случае, когда определение является утвердительным, последовательность операций переключается на этап 514, а в случае, когда определение отрицательно, последовательность операций возвращается к этапу 500, и вышеописанная обработка повторяется. В этой связи следует отметить, что на этапе 512 может быть предоставлена конфигурация, в которой определяется, было ли достигнуто или нет время t3, когда привод 28 ремня безопасности работает так, что предварительно определенное натяжение начинает применяться к ремню 32 безопасности.
На этапе 514 регулировка сиденья останавливается, последовательность операций возвращается к этапу 500, и вышеописанная обработка повторяется.
С другой стороны, когда определение на этапе 502 отрицательно и последовательность операций переключается к этапу 516, определяется, регулируется ли сиденье в настоящий момент или нет. Т.е. определяется, стала или нет степень неустойчивости транспортного средства равной или большей, чем первое значение, и работает ли привод 26 сиденья. В случае, когда определение является утвердительным, последовательность операций переключается на этап 518, а в случае, когда определение отрицательно, последовательность операций возвращается к этапу 500, и вышеописанная обработка повторяется.
На этапе 518, поскольку регулировка сиденья выполняется вследствие работы привода 26 сиденья, выполняется перенастройка, чтобы останавливать работу привода 26 сиденья, последовательность операций возвращается к этапу 500, и вышеописанная обработка повторяется. В этой связи следует отметить, что может быть предоставлена конфигурация, в которой в качестве перенастройки привод 26 сиденья работает так, чтобы вернуть сиденье в положение перед срабатыванием привода 26 сиденья. Далее будет пояснена последовательность обработки, которая выполняется в ЭБУ 48 управления ремнем безопасности. Фиг. 11 представляет собой блок-схему, показывающую один пример последовательности обработки, которая выполняется в ЭБУ 48 управления ремнем безопасности устройства 11 защиты пассажира транспортного средства согласно второму примерному варианту осуществления настоящего изобретения. В этой связи следует отметить, что обработка на фиг. 11 будет пояснена как обработка, которая начинается, когда переключатель зажигания включен.
На этапе 600 вводится состояние транспортного средства, которое было оценено посредством VSC ЭБУ 44, и последовательность операций переключается на этап 602.
На этапе 602 определяется, стала или нет степень неустойчивости транспортного средства равной или большей, чем второе значение. В этом определении определяется, например, перешло или нет состояние скольжения или состояние заноса в состояние вращения или т.п. В случае, когда определение является утвердительным, последовательность операций переключается на этап 604, а в случае, когда определение отрицательно, последовательность операций переключается на этап 614.
На этапе 604 определяется, регулируется или нет ремень безопасности в текущий момент. В этом определении определяется, стала или нет степень неустойчивости транспортного средства равной или большей, чем второе значение, и работает ли привод 28 ремня безопасности. В случае, когда определение является отрицательным, последовательность операций переключается на этап 606, а в случае, когда определение положительно, последовательность операций переключается на этап 608.
На этапе 606 регулировка ремня безопасности начинается вследствие работы запускаемого привода 28 ремня безопасности, и последовательность операций возвращается к этапу 600. Т.е. натяжение применяется к ремню 32 безопасности.
Дополнительно на этапе 608, определяется, достигнуто или нет предварительно определенное время остановки ремня (время от начала регулировки ремня до момента, когда достигнуто желаемое натяжение). В случае, когда определение является отрицательным, последовательность операций переключается на этап 610, а в случае, когда определение положительно, последовательность операций переключается на этап 612.
На этапе 610 определяется, произошло ли столкновение или нет. В этом определении определяется, произошло ли столкновение, из значений датчика 36 скорости транспортного средства и датчика 38 ускорения или т.п., или определяется, было или нет обнаружено столкновение неиллюстрированным датчиком в бампере. В случае, когда определение является утвердительным, последовательность операций переключается на этап 612, а в случае, когда определение отрицательно, последовательность операций возвращается к этапу 600, и вышеописанная обработка повторяется.
На этапе 612 работа привода 28 ремня безопасности останавливается, регулировка ремня останавливается и последовательность обработки заканчивается.
С другой стороны, когда определение на этапе 602 отрицательно и последовательность операций переключается на этап 614, определяется, регулируется ли ремень в настоящие момент или нет. Т.е. определяется, работает ли уже привод 28 ремня безопасности или нет. В случае, когда определение является утвердительным, последовательность операций переключается на этап 616, а в случае, когда определение отрицательно, последовательность операций возвращается к этапу 600, и вышеописанная обработка повторяется.
На этапе 616, поскольку регулировка ремня безопасности выполняется вследствие работы привода 28 ремня безопасности, повторная установка выполняется, чтобы остановить работу привода 28 ремня безопасности, последовательность операций возвращается к этапу 600, и вышеописанная обработка повторяется.
Т.е. в устройстве 11 защиты пассажира транспортного средства согласно второму примерному варианту осуществления настоящего изобретения регулировка сиденья начинается в момент, когда степень неустойчивости транспортного средства становится равной или большей, чем первое значение, а регулировка ремня безопасности начинается в момент, когда степень неустойчивости транспортного средства становится равной или большей, чем второе значение. Дополнительно регулировка сиденья останавливается в момент, когда степень неустойчивости транспортного средства становится вторым значением, или в момент, когда было достигнуто время t3, когда привод 28 ремня безопасности работает так, что предварительно определенное натяжение начинает применяться к ремню 32 безопасности. В результате не допускается ситуация, в которой регулировка сиденья и регулировка ремня безопасности продолжают одновременно выполняться до тех пор, пока не происходит поломка, и, тем же образом, что и в первом примерном варианте осуществления, может быть предотвращена ситуация, в которой нагрузка на привод 26 сиденья для выполнения регулировки сиденья увеличивается, что может вызывать поломку, или в которой чрезмерная нагрузка прикладывается к пассажиру транспортного средства.
Дополнительно в настоящем примерном варианте осуществления также в случае, где было обнаружено, что транспортное средство находится в неустойчивом состоянии, поскольку регулировка сиденья выполняется со скоростью, которая выше, чем скорость регулировки сиденья при управлении пассажиром транспортного средства, может быть предотвращена ситуация, как показано на фиг. 7C, в которой регулировка ремня безопасности начинается без завершения регулировки сиденья, и обе регулировки продолжают одновременно выполняться до тех пор, пока не произойдет поломка, или в которой чрезмерная нагрузка прикладывается к пассажиру транспортного средства.
В этой связи следует отметить, что в зависимости от величины регулировки сиденья, поскольку регулировка в соответствующее положение заканчивается немедленно, даже если предусмотрена конфигурация, в которой обработка определения остановки регулировки сиденья (этап 512) пропущена, и регулировка ремня безопасности выполняется как раз после начала регулировки сиденья, представляется возможным предотвратить ситуацию, в которой регулировка сиденья и регулировка ремня безопасности продолжают одновременно выполняться, и происходит поломка, или в которой чрезмерная нагрузка прикладывается к пассажиру транспортного средства, тем же образом, что и в вышеописанном примерном варианте осуществления.
Более того, в настоящем примерном варианте осуществления, поскольку регулировка ремня безопасности выполняется после регулировки сиденья в соответствующее положение, натяжение ремня безопасности может быть применено к пассажиру транспортного средства в соответствующей при езде, и, следовательно, защита пассажира транспортного средства ремнем безопасности может выполняться должным образом.
В этой связи следует отметить, что в соответствующих примерных вариантах осуществления, описанных выше, хотя была пояснена конфигурация, в которой обработка соответствующих блок-схем выполняется во множестве ЭБУ, изобретение не ограничено этим, и может быть предусмотрена конфигурация, в которой обработка соответствующих блок-схем выполняется в одном ЭБУ.
Дополнительно в соответствующих примерных вариантах осуществления, описанных выше, хотя был объяснен случай, в котором переднее сиденье 34 и ремень 32 безопасности регулируются, как показано на фиг. 1, изобретение не ограничено этим, и может быть применено к случаю, когда регулируются сиденья и ремни безопасности в соответствующих местоположениях.
Дополнительно в вышеописанном первом примерном варианте осуществления, хотя была предоставлена конфигурация, в которой столкновение прогнозируется с помощью результатов определения переднего радара 12-миллиметрового диапазона, переднего бокового радара 14-миллиметрового диапазона и стереокамеры 16 и т.п., изобретение не ограничено этим, и могут применяться известные способы прогнозирования столкновения. Например, может быть предоставлена конфигурация, в которой применяется способ прогнозирования столкновения с помощью результатов определения лазерного радара, инфракрасной камеры или т.п.
Дополнительно, хотя в вышеописанном втором примерном варианте осуществления была предоставлена конфигурация, в которой степень неустойчивости транспортного средства получается с помощью VSC-системы, изобретение не ограничено этим, и, например, может быть предоставлена конфигурация, в которой степень неустойчивости транспортного средства получается из рабочего состояния ABS.
Изобретение относится к оборудованию транспортных средств для защиты экипажа и пассажиров в случае аварии или ином дорожно-транспортном происшествии. Предложенное устройство плавно управляет сиденьем и ремнем безопасности. Когда прогнозируется столкновение, если время до столкновения достигает предварительно установленного времени t1, электронный блок управления (ЭБУ) сиденьем запускает привод сиденья. Если же время до столкновения достигает предварительно установленного времени t2 (t1>t2), ЭБУ сиденьем запускает привод ремня безопасности. Дополнительно, когда достигается время t2 до столкновения, или когда достигается время t3 (t1>t2>t3), в которое активируется привод ремня безопасности, чтобы начать применение предварительно определенной силы натяжения к ремню безопасности, ЭБУ управления сиденьем останавливает привод ремня безопасности. Регулировка сиденья и регулировка ремня безопасности могут быть приспособлены так, что обе регулировки не выполняются в одно и то же время, или, альтернативно, так, что обе регулировки работают в одно и то же время только в течение периода времени, в котором начинается применение предварительно определенной силы натяжения к ремню безопасности. Изобретение позволяет предотвратить неблагоприятные эффекты из-за ситуации, в которой регулировка сиденья и регулировка ремня продолжают одновременно выполняться, когда в этом нет необходимости. 11 з.п. ф-лы, 13 ил.
1. Устройство защиты пассажира транспортного средства, содержащее
секцию регулировки сиденья, которая регулирует положение сиденья в соответствующее положение,
секцию регулировки ремня, которая регулирует натяжение ремня безопасности,
секцию оценки, которая оценивает, существует или нет необходимость регулировки положения сиденья и натяжения ремня безопасности, и
секцию управления, которая в случае, когда было оценено посредством секции оценки, что существует необходимость регулировки положения сиденья и натяжения ремня безопасности, управляет секцией регулировки сиденья и секцией регулировки ремня так, чтобы начинать регулировку посредством секции регулировки ремня после того, как регулировка посредством секции регулировки сиденья остановлена, или так, чтобы начинать регулировку посредством секции регулировки ремня после того, как регулировка посредством секции регулировки сиденья начата, и останавливать регулировку посредством секции регулировки сиденья в момент, когда было достигнуто время, когда к ремню безопасности вследствие регулировки ремня начинает применяться предварительно определенное натяжение.
2. Устройство по п.1, в котором
секция оценки оценивает, что существует необходимость регулировки положения сиденья и натяжения ремня безопасности, в случае, когда столкновение было спрогнозировано секцией прогнозирования, которая прогнозирует столкновение, и
в случае, когда было оценено секцией оценки, что существует необходимость регулировки положения сиденья и натяжения ремня безопасности, секция управления начинает регулировку посредством секции регулировки сиденья в момент, когда время до спрогнозированного столкновения стало первым временем, и начинает регулировку посредством секции регулировки ремня в момент, когда время до спрогнозированного столкновения стало вторым временем, которое короче чем первое время.
3. Устройство по п.1, в котором
секция оценки оценивает, что существует необходимость регулировки положения сиденья и натяжения ремня безопасности в случае, когда предварительно определенная степень неустойчивости была определена секцией определения, которая определяет степень неустойчивости транспортного средства, выражающую степень нарушения положения транспортного средства, которое оценивается из состояния движения, и
секция управления начинает регулировку посредством секции регулировки сиденья в случае, когда степень неустойчивости транспортного средства, которая была определена секцией определения, принимает первое значение, и начинает регулировку посредством секции регулировки ремня в случае, когда степень неустойчивости транспортного средства, которая была определена секцией определения, принимает второе значение, которое больше чем первое значение.
4. Устройство по п.1, в котором секция управления останавливает регулировку посредством секции регулировки сиденья в случае, когда положение сиденья становится соответствующим предварительно определенному положению прежде чем выполняется управление с тем, чтобы останавливать регулировку посредством секции регулировки сиденья.
5. Устройство по п.1, в котором секция управления останавливает регулировку посредством секции регулировки сиденья после истечения предварительно определенного периода времени после того, как начата регулировка посредством секции регулировки сиденья.
6. Устройство по п.1, в котором секция регулировки сиденья регулирует сиденье в соответствующее положение со скоростью, которая выше чем скорость во время регулировки положения сиденья при регулировке пассажиром транспортного средства.
7. Устройство по п.2, в котором секция управления останавливает регулировку посредством секции регулировки сиденья в случае, когда положение сиденья становится соответствующим предварительно определенному положению прежде чем выполняется управление с тем, чтобы останавливать регулировку посредством секции регулировки сиденья.
8. Устройство по п.2, в котором секция управления останавливает регулировку посредством секции регулировки сиденья после истечения предварительно определенного периода времени после того, как начата регулировка посредством секции регулировки сиденья.
9. Устройство по п.2, в котором секция регулировки сиденья регулирует сиденье в соответствующее положение со скоростью, которая выше чем скорость во время регулировки положения сиденья при регулировке пассажиром транспортного средства.
10. Устройство п.3, в котором секция управления останавливает регулировку посредством секции регулировки сиденья в случае, когда положение сиденья становится соответствующим предварительно определенному положению прежде чем выполняется управление с тем, чтобы останавливать регулировку посредством секции регулировки сиденья.
11. Устройство по п.3, в котором секция управления останавливает регулировку посредством секции регулировки сиденья после истечения предварительно определенного периода времени после того, как начата регулировка посредством секции регулировки сиденья.
12. Устройство по п.3, в котором секция регулировки сиденья регулирует сиденье в соответствующее положение со скоростью, которая выше чем скорость во время регулировки положения сиденья при регулировке пассажиром транспортного средства.
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| JP 6286581 А, 11.10.1994 | |||
| JP 2007153306 A, 21.06.2007 | |||
| КУЗОВ АВТОМОБИЛЯ ПОВЫШЕННОЙ БЕЗОПАСНОСТИ | 2004 |
|
RU2270778C2 |

