Область техники
[0001] Настоящее изобретение относится к управляющему устройству для сиденья транспортного средства.
Уровень техники
[0002] В публикации WO 2015/011866 описано устройство для помощи вождению транспортного средства, которое управляет углом наклона спинки сиденья транспортного средства согласно режиму вождения транспортного средства. В устройстве для помощи вождению транспортного средства, описанном в вышеупомянутом документе, управление мотором выполняется так, чтобы наклонять спинку сиденья, так что угол наклона спинки сиденья в режиме автоматического вождения больше угла наклона спинки сиденья в режиме ручного вождения.
Сущность изобретения
[0003] Между тем, в случае, в котором угол наклона спинки сиденья устанавливается большим в режиме автоматического вождения или в случае, в котором позиция транспортного средства в продольном направлении сиденья сдвигается назад, существует возможность для улучшения безопасности пассажира.
[0004] В свете вышеупомянутых обстоятельств, целью настоящего изобретения является предоставление устройства для управления сиденьем транспортного средства, имеющего высокую безопасность для пассажира, сидящего на сиденье транспортного средства во время столкновения транспортного средства в режиме автоматического вождения.
[0005] Устройство для управления сиденьем транспортного средства согласно аспекту настоящего изобретения включает в себя: по меньшей мере, один актуатор, предусмотренный в транспортном средстве, сконфигурированном перемещаться посредством автоматического вождения, актуатор выполнен с возможностью регулировать, по меньшей мере, одно из угла наклона или позиции сиденья транспортного средства в продольном направлении сиденья, и угол наклона является углом спинки сиденья транспортного средства в заднем направлении сиденья относительно подушки сиденья транспортного средства; и блок управления, сконфигурированный, чтобы определять, предусмотрен или нет дорожный разделитель на дороге, по которой транспортное средство движется, и выполнять, когда определяется, что дорожный разделитель не предусмотрен, по меньшей мере, что-либо одно из 1) управления актуатором, чтобы не наклонять спинку сиденья назад на угол более заданного угла, 2) управления актуатором, чтобы не позиционировать сиденье транспортного средства в позицию далее назад по сравнению с заданной позицией, 3) вывода предупреждающего сигнала, когда спинка сиденья наклоняется назад на угол более заданного угла, и 4) вывода предупреждающего сигнала, когда сиденье транспортного средства позиционируется в позиции далее назад по сравнению с заданной позицией.
[0006] Согласно вышеупомянутому аспекту, посредством срабатывания одного или множества актуаторов, по меньшей мере, одно из угла наклона спинки сиденья и позиции сиденья транспортного средства в продольном направлении сиденья регулируется. Здесь, когда дорожный разделитель не предусмотрен на дороге, по которой транспортное средство (далее в данном документе называемое "рассматриваемым транспортным средством"), включающее в себя устройство для управления сиденьем транспортного средства настоящего изобретения, движется, может считаться, что рассматриваемое транспортное средство и транспортное средство, движущееся по встречной полосе (далее в данном документе называемое "встречным транспортным средством"), могут столкнуться друг с другом, и, таким образом, ускорение замедления рассматриваемого транспортного средства может становиться более высоким. По этой причине, блок управления выполняет любое управление из вышеупомянутых (1)-(4), когда блок управления определяет, что дорожный разделитель не предусмотрен на дороге, по которой рассматриваемое транспортное средство движется. С такой конфигурацией возможно уменьшать возникновение такого случая, когда сидящий пассажир соскальзывает вперед по подушке сиденья, и ухудшение характеристики удержания верхней части тела сидящего пассажира во время столкновения с встречным транспортным средством, чтобы, тем самым, уменьшать увеличение величины повреждения сидящего пассажира.
[0007] В вышеприведенном аспекте блок управления может быть сконфигурирован, чтобы, когда блок управления определяет, что дорожный разделитель предусмотрен, устанавливать, по меньшей мере, одно из заданного угла и заданной позиции на основе, по меньшей мере, одного из скорости движения транспортного средства и расчетной скорости транспортного средства.
[0008] Согласно вышеприведенной конфигурации, когда дорожный разделитель предусмотрен (когда существует низкая вероятность столкновения с транспортным средством, движущимся по встречной полосе), возможно устанавливать степень допустимого угла наклона и допустимой позиции в продольном направлении сиденья транспортного средства в зависимости от скорости движения или расчетной скорости рассматриваемого транспортного средства.
[0009] В вышеупомянутом аспекте блок управления может быть сконфигурирован, чтобы, когда блок управления определяет, что дорожный разделитель не предусмотрен, устанавливать, по меньшей мере, одно из заданного угла и заданной позиции на основе, по меньшей мере, расчетной скорости встречного транспортного средства, которое движется по встречной полосе дороги, где транспортное средство движется.
[0010] Согласно вышеупомянутой конфигурации, когда дорожный разделитель не предусмотрен (когда существует вероятность столкновения с транспортным средством, движущимся по встречной полосе), принимая во внимание скорость встречного транспортного средства, движущегося по встречной полосе, степень допустимого угла наклона и допустимой позиции в продольном направлении сиденья транспортного средства может быть задана.
[0011] В вышеупомянутом аспекте, блок управления может быть сконфигурирован, чтобы, когда блок управления определяет, что дорожный разделитель не предусмотрен, задавать, по меньшей мере, одно из заданного угла и заданной позиции на основе суммарной скорости для скорости движения транспортного средства и расчетной скорости встречного транспортного средства или суммарной скорости для расчетной скорости транспортного средства и расчетной скорости встречного транспортного средства.
[0012] Согласно вышеупомянутой конфигурации, когда дорожный разделитель не предусмотрен (когда существует вероятность столкновения с транспортным средством, движущимся по встречной полосе), возможно задавать степень допустимого угла наклона и допустимой позиции в продольном направлении сиденья транспортного средства, в то же время предполагая скорость столкновения с встречным транспортным средством, движущимся по встречной полосе.
[0013] В вышеупомянутом аспекте блок управления может быть сконфигурирован, чтобы: получать информацию о дороге, по которой движется транспортное средство, посредством беспроводной связи; и определять расчетную скорость встречного транспортного средства на основе информации о дороге, полученной посредством беспроводной связи.
[0014] Согласно вышеприведенной конфигурации, на основе информации о дороге, полученной посредством беспроводной связи, возможно задавать степень допустимого угла наклона и допустимой позиции в продольном направлении сиденья транспортного средства.
[0015] В вышеупомянутом аспекте блок управления может быть сконфигурирован, чтобы: получать информацию от встречного транспортного средства посредством беспроводной связи; и определять расчетную скорость встречного транспортного средства на основе информации, полученной посредством беспроводной связи.
[0016] Согласно вышеприведенной конфигурации, на основе информации от встречного транспортного средства, движущегося по встречной полосе, полученной посредством беспроводной связи, возможно задавать степень допустимого угла наклона и допустимой позиции в продольном направлении сиденья транспортного средства.
[0017] В вышеупомянутом аспекте блок управления может быть сконфигурирован, чтобы получать информацию о скорости встречного транспортного средства посредством датчика, предусмотренного в транспортном средстве, и блок управления может определять расчетную скорость встречного транспортного средства на основе информации о скорости встречного транспортного средства, полученной от датчика.
[0018] Согласно вышеприведенной конфигурации, на основе информации о скорости встречного транспортного средства, движущегося по встречной полосе, полученной посредством датчика, возможно задавать степень допустимого угла наклона и допустимой позиции в продольном направлении сиденья транспортного средства.
[0019] В вышеупомянутом аспекте блок управления может быть сконфигурирован, чтобы получать информацию о полосе движения, где, по меньшей мере, одно из транспортного средства и встречного транспортного средства движется, посредством датчика, предусмотренного в транспортном средстве, и блок управления может определять расчетную скорость встречного транспортного средства на основе информации о полосе движения, полученной от датчика.
[0020] Согласно вышеприведенной конфигурации, на основе информации о полосе движения, полученной посредством датчика, возможно задавать степень допустимого угла наклона и допустимой позиции в продольном направлении сиденья транспортного средства.
[0021] В вышеупомянутом аспекте блок управления может быть сконфигурирован, чтобы определять скорость, полученную вычитанием величины замедления посредством автоматического торможения из скорости движения транспортного средства, в качестве расчетной скорости транспортного средства.
[0022] Согласно вышеприведенной конфигурации, принимая во внимание величину замедления посредством автоматического торможения, возможно задавать степень допустимого угла наклона и допустимой позиции в продольном направлении сиденья транспортного средства.
[0023] В вышеописанном аспекте сиденье транспортного средства может включать в себя актуатор для наклона, который регулирует угол наклона спинки сиденья в заднем направлении сиденья; блок управления может быть сконфигурирован, чтобы, когда блок управления определяет, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство движется посредством автоматического вождения, управлять актуатором для наклона, так что угол наклона становится меньше угла наклона в случае, в котором блок управления определяет, что дорожный разделитель предусмотрен, или когда блок управления определяет, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство движется, выводить предупреждающий сигнал при угле наклона менее угла наклона в случае, в котором блок управления определяет, что дорожный разделитель предусмотрен.
[0024] Согласно вышеприведенной конфигурации, спинка сиденья наклоняется в продольном направлении сиденья относительно подушки сиденья посредством приведения в действие актуатора для наклона. Здесь, в состоянии, когда определяется, что дорожный разделитель не предусмотрен на дороге, по которой рассматриваемое транспортное средство движется, может считаться, что существует высокая вероятность того, что ускорение замедления рассматриваемого транспортного средства, в случае, когда рассматриваемое транспортное средство и транспортное средство, движущееся по встречной полосе, сталкиваются друг с другом, является большим. По этой причине, когда блок управления определяет, что дорожный разделитель не предусмотрен на дороге, по которой рассматриваемое транспортное средство движется посредством автономного вождения, блок управления управляет актуатором для наклона на заданный угол наклона, который должен быть меньше по сравнению со случаем, в котором дорожный разделитель предусмотрен, или выводит предупреждающий сигнал при угле наклона, меньшем по сравнению со случаем, в котором блок управления определяет, что дорожный разделитель предусмотрен. Соответственно, возможно ограничивать угол наклона спинки сиденья от большего в заднем направлении сиденья в случае, в котором дорожный разделитель не предусмотрен на дороге, по которой рассматриваемое транспортное средство движется. В результате, во время столкновения с транспортным средством, движущимся по встречной полосе, такое событие, что сидящий пассажир соскальзывает вперед по подушке сиденья, и характеристика удерживания верхней части тела сидящего пассажира сдерживаются от ухудшения, чтобы, таким образом, увеличивать уменьшение величины повреждения сидящего пассажира.
[0025] В вышеупомянутом аспекте блок управления может быть сконфигурирован, чтобы задавать заданный угол на основе позиции в продольном направлении сиденья для подушки сиденья.
[0026] Согласно вышеприведенной конфигурации, блок управления управляет актуатором для наклона или выводит предупреждающий сигнал на основе позиции в продольном направлении сиденья для подушки сиденья. Тем самым, степень допустимого угла наклона может быть задана на основе позиции в продольном направлении сиденья для подушки сиденья.
[0027] В вышеприведенном аспекте блок управления может быть сконфигурирован, чтобы задавать заданный угол на основе позиции коленей пассажира, сидящего на подушке сиденья.
[0028] Согласно вышеприведенной конфигурации, блок управления управляет актуатором для наклона или выводит предупреждающий сигнал на основе позиции коленей пассажира, сидящего на подушке сиденья. Соответственно, степень допустимого угла наклона может быть задана в зависимости от позиции коленей пассажира, сидящего на подушке сиденья.
[0029] В вышеприведенном аспекте блок управления может быть сконфигурирован, чтобы задавать заданный угол на основе позиции головы пассажира, сидящего на подушке сиденья.
[0030] Согласно вышеприведенной конфигурации, на основе позиции головы пассажира, сидящего на подушке сиденья, блок управления управляет актуатором для наклона или выводит предупреждающий сигнал. Тем самым, степень допустимого угла наклона может быть задана в зависимости от позиции головы пассажира, сидящего на подушке сиденья.
[0031] В вышеприведенном аспекте блок управления может быть сконфигурирован, чтобы останавливать наклон спинки сиденья, останавливая работу актуатора для наклона, когда угол наклона достигает заданного угла.
[0032] Согласно вышеприведенной конфигурации, когда угол наклона достигает допустимого угла наклона, блок управления прекращает работу актуатора для наклона. Тем самым, наклон спинки сиденья останавливается, чтобы, таким образом, предотвращать или ограничивать угол наклона спинки сиденья в заднем направлении сиденья от становления больше допустимого угла наклона.
[0033] В вышеприведенном аспекте, блок управления может быть сконфигурирован, чтобы инструктировать спинке сиденья наклоняться вперед, приводя в действие актуатор для наклона, с тем, чтобы задавать угол наклона в угол, равный или меньше заданного угла.
[0034] Согласно вышеприведенной конфигурации, спинка сиденья наклоняется так, что угол наклона достигает угла, соответствующего допустимому углу наклона. Таким образом, угол наклона спинки сиденья в заднем направлении сиденья предохраняется и ограничивается от становления больше допустимого угла наклона.
[0035] В вышеприведенном аспекте сиденье транспортного средства может включать в себя актуатор для скольжения сиденья, который регулирует позицию сиденья транспортного средства в продольном направлении сиденья, и блок управления может быть сконфигурирован, чтобы, когда блок управления определяет, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство движется посредством автоматического вождения, управлять актуатором для скольжения сиденья так, чтобы позиционировать сиденье транспортного средства дальше вперед по сравнению со случаем, в котором блок управления определяет, что дорожный разделитель предусмотрен, или когда блок управления определяет, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство движется, выводить предупреждающий сигнал в состоянии, в котором сиденье транспортного средства позиционируется дальше вперед по сравнению со случаем, в котором блок управления определяет, что дорожный разделитель предусмотрен.
[0036] Согласно вышеприведенной конфигурации, сиденье транспортного средства перемещается в продольном направлении сиденья посредством приведения в действие актуатора для скольжения сиденья. Здесь, в случае, в котором дорожный разделитель не предусмотрен на дороге, по которой рассматриваемое транспортное средство движется, может считаться, что существует высокая вероятность того, что ускорение замедления рассматриваемого транспортного средства, когда рассматриваемое транспортное средство и транспортное средство, движущееся по встречной полосе, сталкиваются друг с другом, является высоким. Следовательно, когда блок управления определяет, что дорожный разделитель не предусмотрен на дороге, по которой рассматриваемое транспортное средство движется посредством автоматического вождения, блок управления управляет актуатором для скольжения сиденья, чтобы позиционировать сиденье транспортного средства дальше вперед по сравнению со случаем, в котором дорожный разделитель предусмотрен, или выводит предупреждающий сигнал в состоянии, в котором сиденье транспортного средства позиционируется дальше вперед по сравнению со случаем, в котором блок управления определяет, что дорожный разделитель предусмотрен. Соответственно, расстояние в продольном направлении сиденья между пассажиром, сидящим на сиденье транспортного средства, и элементом, конфигурирующим транспортное средство в случае, в котором дорожный разделитель предусмотрен на дороге, по которой рассматриваемое транспортное средство движется, ограничивается от становления более длинным. В результате, во время столкновения с транспортным средством, движущимся по встречной полосе, возникновение такого случая, что сидящий пассажир скользит по подушке сиденья в переднем направлении сиденья, пресекается, чтобы, таким образом, уменьшать увеличение в величине повреждения сидящего пассажира.
[0037] В вышеприведенном аспекте, сиденье транспортного средства может быть сконфигурировано, чтобы останавливать перемещение в продольном направлении сиденья транспортного средства посредством блока управления, останавливающего работу актуатора для скольжения сиденья, когда позиция сиденья транспортного средства в продольном направлении сиденья достигает заданной позиции.
[0038] Согласно вышеприведенной конфигурации, когда позиция сиденья транспортного средства в продольном направлении сиденья достигает допустимой позиции, блок управления прекращает работу актуатора для скольжения сиденья. Таким образом, перемещение сиденья транспортного средства в продольном направлении сиденья останавливается, и, таким образом, предотвращается или пресекается то, что позиция сиденья транспортного средства в продольном направлении сиденья позиционируется дальше назад по сравнению с допустимой позицией.
[0039] В вышеприведенном аспекте, сиденье транспортного средства может быть сконфигурировано, чтобы перемещаться вперед посредством блока управления, задействующего актуатор для скольжения сиденья, так что позиция сиденья транспортного средства позиционируется в заданной позиции или в позиции дальше вперед по сравнению с заданной позицией в продольном направлении сиденья.
[0040] Согласно вышеприведенной конфигурации, сиденье транспортного средства перемещается так, что позиция сиденья транспортного средства в продольном направлении сиденья достигает допустимой позиции. Соответственно, позиция сиденья транспортного средства в продольном направлении сиденья предохраняется или сдерживается от позиционирования дальше назад по сравнению с допустимой позицией.
[0041] В вышеприведенном аспекте, блок управления может быть сконфигурирован, чтобы замедлять транспортное средство, по меньшей мере, либо когда спинка сиденья наклоняется назад на угол больше заданного угла, либо когда сиденье транспортного средства позиционируется дальше назад по сравнению с заданной позицией.
[0042] Согласно вышеприведенной конфигурации, скорость столкновения между рассматриваемым транспортным средством и встречным транспортным средством может быть более низкой. Таким образом, возможно уменьшать увеличение в величине повреждения сидящего пассажира во время столкновения между рассматриваемым транспортным средством и встречным транспортным средством.
[0043] В вышеприведенном аспекте, блок управления может быть сконфигурирован, чтобы получать информацию о дороге, по которой движется транспортное средство, посредством беспроводной связи, и блок управления может выполнять, по меньшей мере, одно из управления актуатором и вывода предупреждающего сигнала, предполагая, что дорожный разделитель не предусмотрен, когда блок управления определяет, что дорога является дорогой для двухстороннего движения, на основе информации о дороге, полученной посредством беспроводной связи.
[0044] Согласно вышеприведенной конфигурации, принимая во внимание случай, в котором двухстороннее движение применяется вследствие ограничений на дороге, или т.п., например, возможно задавать степень допустимого угла наклона, и т.д., и предоставлять предупреждение.
[0045] В вышеприведенном аспекте, транспортное средство может быть сконфигурировано, чтобы двигаться посредством ручного вождения или автоматического вождения; спинка сиденья может быть сконфигурирована, чтобы наклоняться назад посредством блока управления, задействующего актуатор, когда вождение транспортного средства переключается с ручного вождения на автоматическое вождение; и сиденье транспортного средства может быть сконфигурировано, чтобы перемещаться назад посредством блока управления, задействующего актуатор, когда вождение транспортного средства переключается с ручного вождения на автоматическое вождение, или перемещаться назад со спинкой сиденья, наклоненной назад посредством блока управления, задействующего актуатор, когда вождение транспортного средства переключается с ручного вождения на автоматическое вождение.
[0046] Согласно вышеприведенной конфигурации, когда вождение транспортного средства переключается с ручного вождения на автоматическое вождение, сидящий пассажир может изменять позу и позицию сиденья транспортного средства, которая предоставляет возможность сидящему пассажиру принимать комфортную позу.
[0047] Устройство для управления сиденьем транспортного средства согласно настоящему изобретению имеет отличный результат, чтобы улучшать безопасность для пассажира, сидящего в сиденье транспортного средства во время столкновения транспортного средства в режиме автоматического вождения.
Краткое описание чертежей
[0048] Признаки, преимущества и техническое и промышленное значение примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на сопровождающие чертежи, на которых одинаковыми ссылочными позициями обозначены аналогичные элементы, и на которых:
Фиг. 1A - вид сбоку, показывающий салон транспортного средства, включающего в себя устройство для управления сиденьем транспортного средства согласно первому варианту осуществления;
Фиг. 1B - блок-схема, показывающая систему управления устройства для управления сиденьем транспортного средства;
Фиг. 1C - блок-схема последовательности операций, показывающая последовательность обработки посредством устройства для управления сиденьем транспортного средства;
Фиг. 2 - график, показывающий соотношение между задаваемой скоростью рассматриваемого транспортного средства и т.п. и допустимым углом наклона в случае, в котором дорожный разделитель не предусмотрен;
Фиг. 3 - график, показывающий соотношение между задаваемой скоростью рассматриваемого транспортного средства и т.п. и допустимым углом наклона, когда дорожный разделитель предусмотрен;
Фиг. 4 - вид сбоку, показывающий салон транспортного средства, включающего в себя устройство для управления сиденьем транспортного средства согласно второму варианту осуществления, показывающий состояние, в котором позиция сиденья транспортного средства располагается на передней стороне;
Фиг. 5 - вид сбоку, показывающий салон транспортного средства, включающего в себя устройство для управления сиденьем транспортного средства согласно второму варианту осуществления, показывающий состояние, в котором позиция сиденья транспортного средства располагается на задней стороне;
Фиг. 6 - график, показывающий соотношение между задаваемой скоростью рассматриваемого транспортного средства и т.п. и допустимым углом наклона, когда дорожный разделитель не предусмотрен во втором варианте осуществления;
Фиг. 7 - это вид сбоку, показывающий салон транспортного средства, включающего в себя устройство для управления сиденьем транспортного средства согласно третьему варианту осуществления, показывающий состояние, в котором позиция сиденья транспортного средства располагается на передней стороне;
Фиг. 8 - вид сбоку, показывающий салон транспортного средства, включающего в себя устройство для управления сиденьем транспортного средства согласно третьему варианту осуществления, показывающий состояние, в котором позиция сиденья транспортного средства располагается на задней стороне;
Фиг. 9 - график, показывающий соотношение между задаваемой скоростью рассматриваемого транспортного средства и т.п. и допустимым углом наклона в случае, в котором дорожный разделитель не предусмотрен в третьем варианте осуществления;
Фиг. 10 - вид сбоку, показывающий салон транспортного средства, включающего в себя устройство для управления сиденьем транспортного средства согласно четвертому варианту осуществления, показывающий состояние, в котором позиция сиденья транспортного средства располагается на передней стороне;
Фиг. 11 - вид сбоку, показывающий салон транспортного средства, включающего в себя устройство для управления сиденьем транспортного средства четвертого варианта осуществления, показывающий состояние, в котором позиция сиденья транспортного средства располагается на задней стороне;
Фиг. 12 - график, показывающий соотношение между задаваемой скоростью рассматриваемого транспортного средства и т.п. и допустимым углом наклона в случае, в котором дорожный разделитель не предусмотрен в четвертом варианте осуществления;
Фиг. 13 - вид сбоку, показывающий салон транспортного средства, включающего в себя устройство для управления сиденьем транспортного средства согласно пятому варианту осуществления, показывающий состояние, в котором позиция сиденья транспортного средства располагается на передней стороне;
Фиг. 14 - вид сбоку, показывающий салон транспортного средства, включающего в себя устройство для управления сиденьем транспортного средства согласно пятому варианту осуществления, показывающий состояние, в котором позиция сиденья транспортного средства располагается на задней стороне;
Фиг. 15 - вид сбоку, схематично показывающий транспортное средство, включающее в себя устройство для управления сиденьем транспортного средства согласно шестому варианту осуществления, и динамическую карту;
Фиг. 16 - график, показывающий соотношение между задаваемой скоростью рассматриваемого транспортного средства и т.п. и допустимым углом наклона в случае, в котором дорожный разделитель не предусмотрен в шестом варианте осуществления;
Фиг. 17 - вид сверху, показывающий состояние движения транспортного средства, включающего в себя устройство для управления сиденьем транспортного средства согласно седьмому варианту осуществления;
Фиг. 18 - вид сверху, показывающий состояние движения транспортного средства, включающего в себя устройство для управления сиденьем транспортного средства восьмого варианта осуществления;
Фиг. 19 - вид сверху, показывающий состояние движения транспортного средства, включающего в себя устройство для управления сиденьем транспортного средства согласно девятому варианту осуществления;
Фиг. 20 - вид сверху, показывающий состояние движения транспортного средства, включающего в себя устройство для управления сиденьем транспортного средства десятого варианта осуществления; и
Фиг. 21 - график, показывающий соотношение между задаваемой скоростью рассматриваемого транспортного средства и т.п. и допустимым углом наклона в случае, в котором дорожный разделитель не предусмотрен в десятом варианте осуществления.
Подробное описание вариантов осуществления изобретения
Устройство 10 для управления сиденьем транспортного средства согласно первому варианту осуществления
[0049] Устройство 10 для управления сиденьем транспортного средства согласно первому варианту осуществления настоящего изобретения будет описано со ссылкой на фиг. 1A-3. Отметим, что соответственно на каждом чертеже стрелка ВПЕРЕД указывает переднюю сторону в продольном направлении транспортного средства 12, а стрелка ВВЕРХ указывает верхнюю сторону в вертикальном направлении транспортного средства 12. Дополнительно, передняя сторона и верхняя сторона транспортного средства 12 совпадают с передней стороной и верхней стороной сиденья 14 транспортного средства, соответственно. В последующем описании, когда просто используются продольное, поперечное и вертикальное направления, пока не указано иное, эти направления соответственно обозначают перед и зад в продольном направлении транспортного средства 12 и сиденья 14 транспортного средства, лево и право в поперечном направлении (направлении ширины транспортного средства) транспортного средства 12 и сиденья 14 транспортного средства и верх и низ в вертикальном направлении транспортного средства 12 и сиденья 14 транспортного средства.
[0050] Фиг. 1A показывает салон 16 транспортного средства 12, включающего в себя устройство 10 для управления сиденьем транспортного средства настоящего варианта осуществления. Как показано на чертеже, салон 16 снабжается сиденьем 14 транспортного средства, в котором пассажир P, держащий руками рулевое колесо 18 и прочее, сидит. Сиденье 14 транспортного средства включает в себя подушку 20 сиденья, которая поддерживает ягодицы P1 пассажира P, и спинку 22 сиденья, которая поддерживает верхнюю часть P2 тела пассажира P. Сиденье 14 транспортного средства включает в себя подголовник 24, который поддерживает голову P3 пассажира P.
[0051] Подушка 20 сиденья конфигурируется посредством установки мягкой набивки подушки сиденья, покрытой материалом обшивки, на каркас подушки сиденья или т.п. Подушка 20 сиденья поддерживается на полу 28 салона 16 посредством направляющей 26 сиденья (верхней направляющей 26A и непоказанной нижней направляющей), которая предоставляет возможность подушке 20 сиденья скользить в продольном направлении.
[0052] Здесь, сиденье 14 транспортного средства настоящего варианта осуществления предусматривается в салоне 16 транспортного средства 12, приспособленного для выполнения автоматического вождения и ручного вождения. Следовательно, сиденье 14 транспортного средства является подвижным в продольном направлении из позиции, где пассажир P, сидящий на сиденье 14 транспортного средства, может держать руками рулевое колесо 18 и прочее, в позицию, где пассажир P не может браться руками за них. Фиг. 1A показывает состояние, в котором сиденье 14 транспортного средства перемещается вперед в позицию, где пассажир P, сидящий на сиденье 14 транспортного средства, может браться руками за рулевое колесо 18 и прочее.
[0053] Как и с подушкой 20 сиденья, спинка 22 сиденья конфигурируется посредством установки мягкой набивки спинки сиденья, покрытой материалом обшивки, на каркас спинки сиденья или т.п. Спинка 22 сиденья устанавливается на задний край подушки 20 сиденья, так, чтобы откидываться (наклоняться) в продольном направлении сиденья. Дополнительно, в настоящем варианте осуществления, спинка 22 сиденья выполнена с возможностью наклоняться посредством срабатывания мотора 30 для наклона в качестве актуатора.
[0054] Подголовник 24 конфигурируется посредством установки основной части подголовника, включающей в себя мягкую набивку подголовника, покрытую материалом обшивки, на стойку подголовника. Когда стойка подголовника вставляется в непоказанный фрагмент для вставки, предусмотренный в спинке 22 сиденья, подголовник 24 устанавливается на верхний край спинки 22 сиденья.
[0055] Как показано на фиг. 1A и фиг. 1B, устройство 10 для управления сиденьем транспортного средства включает в себя: мотор 30, который наклоняет спинку 22 сиденья; и электронный блок управления (ЭБУ) 32, служащий в качестве блока управления, который управляет мотором 30.
[0056] Мотор 30 является DC-мотором, который вращается, когда возбуждение для мотора 30 управляется посредством ЭБУ 32. Мотор 30 снабжается датчиком 34 угла для вычисления угла наклона θ спинки 22 сиденья в заднем направлении сиденья на основе числа оборотов (угла поворота) вала вращения мотора 30.
[0057] ЭБУ 32 выполнен с возможностью включать в себя CPU (центральный процессор) 32A, ROM (постоянное запоминающее устройство) 32B, RAM (оперативное запоминающее устройство) 32C, и блок 32D интерфейса ввода/вывода (I/O), который обеспечивает связь с внешним устройством, и эти компоненты взаимно соединяются друг с другом через шину 32E. Мотор 30 и различные датчики, предусмотренные в транспортном средстве 12, такие как навигационная система 36, угловой датчик 34 и датчик 35 скорости транспортного средства, который обнаруживает скорость транспортного средства 12, электрически соединяются с блоком 32D интерфейса ввода-вывода.
[0058] CPU 32A является центральным процессором и выполняет различные программы и управляет мотором 30 и прочим. Т.е., CPU 32A считывает управляющую программу из ROM 32B и выполняет эту управляющую программу, в то же время используя RAM 32C в качестве рабочей области, с тем, чтобы управлять мотором 30.
[0059] Затем, ЭБУ 32 определяет, предусмотрен или нет дорожный разделитель на дороге, по которой транспортное средство 12 движется, на основе информации от навигационной системы 36 во время автоматического вождения транспортного средства 12 и управляет возбуждением мотора 30. Здесь, дорожный разделитель делит дорогу на полосу движения, где транспортное средство 12 (рассматриваемое транспортное средство) движется, и полосу движения, где встречное транспортное средство движется. Например, дорожный разделитель может быть выступом, бордюрным камнем, стеной, ограждением или дорожной канавой. Кроме того, этот дорожный разделитель может называться срединным разделителем.
[0060] Дополнительно, когда ускорение замедления транспортного средства 12, как предполагается, должно увеличиваться во время лобового столкновения транспортного средства 12, ЭБУ 32 управляет мотором 30 так, чтобы задавать угол наклона θ небольшим.
Когда дорожный разделитель не предусмотрен
[0061] Более конкретно, как показано на фиг. 1A, фиг. 1B и фиг. 1C, когда ЭБУ 32 определяет, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство 12 движется, т.е., когда положительное определение выполняется на этапе S01 на фиг. 1C, ЭБУ 32 определяет, на этапе S02, допустимый угол наклона θ на основе скорости V1, полученной сложением вместе скорости транспортного средства 12 (скорости рассматриваемого транспортного средства) и предельной скорости для дороги (предельной скорости для встречной полосы, определенной в качестве расчетной скорости встречного транспортного средства), записанной заранее в навигационной системе 36. Отметим, что "скорость транспортного средства 12 (скорость рассматриваемого транспортного средства)" является заданной скоростью или фактической скоростью транспортного средства 12 во время автоматического вождения. Фактическая скорость является скоростью транспортного средства 12 на основе сигнала скорости, скоростью транспортного средства 12 на основе GPS-сигнала и т.п. Заданная скорость транспортного средства 12 во время автоматического вождения задается в предельную скорость для дороги (предельную скорость рассматриваемой полосы движения), когда дорожные условия и погода являются хорошими. Дополнительно, предельная скорость рассматриваемой полосы движения и предельная скорость встречной полосы часто имеют одинаковую предельную скорость.
[0062] Как показано на фиг. 2, когда скорость V1, полученная сложением вместе скорости рассматриваемого транспортного средства и предельной скорости для встречной полосы движения, равна 0 км/ч или более и v1 км/ч или менее, ЭБУ 32 определяет допустимый угол наклона θ как θ1. Затем, после определения допустимого угла наклона θ как θ1, ЭБУ 32 определяет, действительно или нет угол наклона θ спинки 22 сиденья больше θ1, на этапе S03. Когда утвердительное определение выполняется на этапе S03, ЭБУ 32 управляет возбуждением для мотора 30 на этапе S04, с тем, чтобы задавать угол наклона θ спинки 22 сиденья не более θ1. Т.е., когда ЭБУ 32 определяет допустимый угол наклона θ как θ1, ЭБУ 32 начинает возбуждение мотора 30 в случае, в котором спинка 22 сиденья отклоняется на угол более θ1. Следовательно, спинка 22 сиденья наклоняется до тех пор, пока угол наклона θ не станет равным или меньше θ1. Когда отрицательное определение выполняется на этапе S03, ЭБУ 32 заканчивает обработку. Или, когда отрицательное определение выполняется на этапе S03, ЭБУ 32 может наклонять спинку 22 сиденья назад посредством возбуждения мотора 30 и затем останавливать возбуждение мотора 30, когда угол наклона θ спинки 22 сиденья достигает θ1. В качестве примера, v1 равно 30 км/ч, а θ1 равно 60°.
[0063] Дополнительно, как показано на фиг. 2, когда скорость V1, полученная сложением вместе скорости рассматриваемого транспортного средства и предельной скорости встречной полосы движения, больше v2 км/ч, ЭБУ 32 определяет допустимый угол наклона θ как θ2 и затем выполняет вышеописанную обработку на этапах S03 и S04. Затем, когда ЭБУ 32 определяет допустимый угол наклона θ как θ2, ЭБУ 32 начинает возбуждение мотора 30, если спинка 22 сиденья наклоняется на угол более θ2. В результате, спинка 22 сиденья наклоняется до тех пор, пока угол наклона θ не станет равным или меньше θ2. Если спинка 22 сиденья не наклоняется на угол более θ2, ЭБУ 32 может заканчивать обработку. Или ЭБУ 32 может наклонять спинку 22 сиденья назад посредством возбуждения мотора 30 и затем останавливать возбуждение мотора 30, когда угол наклона θ спинки 22 сиденья достигает θ2. В качестве примера, v2 равно 110 км/ч, а θ2 равно 30°.
[0064] Дополнительно, когда скорость V1, полученная сложением вместе скорости рассматриваемого транспортного средства и предельной скорости встречной полосы движения, является скоростью v3, которая больше v1 км/ч и меньше v2 км/ч, ЭБУ 32 определяет допустимый угол наклона θ как угол θ3, соответствующий скорости v3, полученной сложением вместе скорости рассматриваемого транспортного средства и предельной скорости встречной полосы движения, и выполняет обработку на этапе S03 и этапе S04. В настоящем варианте осуществления θ3 вычисляется посредством пропорциональной интерполяции между (v1, θ1) и (v2, θ2), как показано на графике на фиг. 2. Затем, когда ЭБУ 32 определяет допустимый угол наклона θ как θ3, ЭБУ 32 начинает возбуждение мотора 30, если спинка 22 сиденья наклоняется на угол более θ3. Соответственно, спинка 22 сиденья наклоняется до тех пор, пока угол наклона θ не становится равным или меньше θ3. Если спинка 22 сиденья не наклоняется на угол более θ3, ЭБУ 32 может заканчивать обработку. Или ЭБУ 32 может наклонять спинку 22 сиденья назад посредством возбуждения мотора 30 и затем останавливать возбуждение мотора 30, когда угол наклона θ спинки 22 сиденья достигает θ3.
Когда дорожный разделитель предусмотрен
[0065] Когда ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, т.е., когда отрицательное определение выполняется на этапе S01, ЭБУ 32 определяет допустимый угол наклона θ на основе скорости V2 транспортного средства (скорости рассматриваемого транспортного средства) для транспортного средства 12 на этапе S05.
[0066] Как показано на фиг. 3, когда скорость V2 рассматриваемого транспортного средства равна 0 км/ч или более и v4 км/ч или менее, ЭБУ 32 определяет допустимый угол наклона θ как θ4. Затем, после определения допустимого угла наклона θ как θ4, ЭБУ 32 определяет, действительно или нет угол наклона θ спинки 22 сиденья наклоняется на угол более θ4, на этапе S03. Когда утвердительное определение выполняется на этапе S03, ЭБУ 32 управляет возбуждением для мотора 30 на этапе S04, с тем, чтобы управлять углом наклона θ спинки 22 сиденья не более θ4. Когда ЭБУ 32 определяет допустимый угол наклона θ как θ4, ЭБУ 32 начинает возбуждение мотора 30, если спинка 22 сиденья наклоняется на угол более θ4. Соответственно, спинка 22 сиденья наклоняется до тех пор, пока угол наклона θ не станет θ4 или менее. Когда отрицательное определение выполняется на этапе S03, ЭБУ 32 заканчивает обработку. Или, когда отрицательное определение выполняется на этапе S03, ЭБУ 32 может наклонять спинку 22 сиденья назад посредством возбуждения мотора 30 и затем останавливать возбуждение мотора 30, когда угол наклона θ спинки 22 сиденья достигает θ4. В качестве примера, v4 равно 20 км/ч, а θ4 равно 60°.
[0067] Дополнительно, когда скорость V2 рассматриваемого транспортного средства становится больше v5 км/ч, ЭБУ 32 определяет допустимый угол наклона θ как θ5 и выполняет вышеописанную обработку на этапе S03 и этапе S04. Затем, когда ЭБУ 32 определяет допустимый угол наклона θ как θ5, ЭБУ 32 начинает возбуждение мотора 30, если спинка 22 сиденья наклоняется на угол более θ5. Соответственно, спинка 22 сиденья наклоняется до тех пор, пока угол наклона θ не станет равным θ5 или менее. Если спинка 22 сиденья не наклоняется на угол более θ5, ЭБУ 32 может заканчивать обработку. Или ЭБУ 32 может наклонять спинку 22 сиденья назад посредством возбуждения мотора 30 и затем останавливать возбуждение мотора 30, когда угол наклона θ спинки 22 сиденья достигает θ5. В качестве примера, v5 равно 50 км/ч, а θ5 равно 30°.
[0068] Дополнительно, когда скорость V2 рассматриваемого транспортного средства является скоростью v6 больше v4 км/ч и меньше v5 км/ч, ЭБУ 32 определяет допустимый угол наклона θ как угол θ6, соответствующий скорости v6 рассматриваемого транспортного средства, и вышеописанная обработка на этапе S03 и этапе S04 выполняется. В настоящем варианте осуществления θ6 вычисляется посредством пропорциональной интерполяции между (v4, θ4) и (v5, θ5), показанными на графике на фиг. 3. Затем, когда ЭБУ 32 определяет допустимый угол наклона θ как θ6, ЭБУ 32 начинает возбуждение мотора 30, если спинка 22 сиденья наклоняется на угол более θ6. Соответственно, спинка 22 сиденья наклоняется до тех пор, пока угол наклона θ не станет равным θ6 или менее. Если спинка 22 сиденья не наклоняется на угол более θ6, ЭБУ 32 может заканчивать обработку. Или ЭБУ 32 может наклонять спинку 22 сиденья назад посредством возбуждения мотора 30 и затем останавливать возбуждение мотора 30, когда угол наклона θ спинки 22 сиденья достигает θ6.
[0069] Как описано выше, в настоящем варианте осуществления, пороговое значение допустимого угла наклона θ задается на основе наличия или отсутствия дорожного разделителя и скорости V1, полученной сложением вместе скорости рассматриваемого транспортного средства и предельной скорости для встречной полосы, или скорости V2 рассматриваемого транспортного средства. Т.е., когда предполагается, что ускорение замедления транспортного средства 12 становится более высоким, когда транспортное средство 12 имеет лобовое столкновение, ЭБУ 32 управляет мотором 30, чтобы задавать угол наклона θ меньшим. С такой конфигурацией угол наклона θ спинки 22 сиденья ограничивается от становления больше, когда дорожный разделитель предусмотрен на дороге, по которой транспортное средство движется, и когда относительная скорость между рассматриваемым транспортным средством и встречным транспортным средством является высокой. В результате, во время столкновения с транспортным средством, движущимся по встречной полосе, событие, в котором сидящий пассажир P соскальзывает по подушке 20 сиденья в переднем направлении сиденья (явление проскальзывания под поясной ветвью ремня безопасности), и характеристика удержания верхней части тела сидящего пассажира P (характеристика удержания посредством трехточечного ремня безопасности или подушки безопасности) ограничиваются, чтобы, таким образом, уменьшать увеличение в величине повреждения сидящего пассажира P. Здесь, величина повреждения пассажира P указывает степень удара, полученного пассажиром P при столкновении с транспортным средством, движущимся по встречной полосе.
[0070] Кроме того, может быть выполнена конфигурация, что, после того как режим вождения переключается с ручного вождения на автоматическое вождение, пассажир P, сидящий на спинке 14 сиденья, может принимать комфортную позу, наклоняя спинку 22 сиденья назад автоматически или посредством действия переключения пассажиром. Даже в этой конфигурации возможно уменьшать увеличение в величине повреждения пассажира P, ограничивая угол наклона θ спинки 22 сиденья, как описано выше.
[0071] В настоящем варианте осуществления было предоставлено описание на примере, в котором пороговое значение допустимого угла θ наклона задается на основе наличия или отсутствия дорожного разделителя, скорости V1, полученной сложением вместе скорости рассматриваемого транспортного средства и предельной скорости встречной полосы движения, и скорости V2 рассматриваемого транспортного средства; однако, настоящее изобретение не ограничивается этим примером. Например, пороговое значение допустимого угла наклона θ, когда дорожный разделитель не предусмотрен на дороге, по которой транспортное средство 12 движется, и пороговое значение допустимого угла наклона θ, когда дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, могут быть фиксированными значениями. Кроме того, пороговое значение допустимого угла наклона θ может быть задано на основе, по меньшей мере, одного из наличия-отсутствия дорожного разделителя, скорости рассматриваемого транспортного средства и предельной скорости.
[0072] В настоящем варианте осуществления описание было предоставлено на примере, в котором мотор 30 управляется так, чтобы задавать угол наклона θ спинки 22 сиденья не более вышеописанного порогового значения, но настоящее изобретение не ограничивается этим примером. Например, когда угол наклона θ спинки 22 сиденья больше вышеописанного порогового значения, ЭБУ 32 может выводить предупреждающий сигнал, чтобы издавать предупреждающий звук в салоне 16. Альтернативно, ЭБУ 32 может выводить предупреждающий сигнал, чтобы предоставлять возможность предупредительной лампе мигать в салоне 16. Т.е., ЭБУ 32 может предупреждать пассажира, что высокая безопасность не гарантируется, выводя предупредительный сигнал.
Устройство 38 для управления сиденьем транспортного средства согласно второму варианту осуществления
[0073] Устройство 38 для управления сиденьем транспортного средства согласно второму варианту осуществления настоящего изобретения будет описано со ссылкой на фиг. 4-6. Отметим, что в устройстве 38 для управления сиденьем транспортного средства согласно второму варианту осуществления, элементы и части, соответствующие элементам и частям устройства 10 для управления сиденьем транспортного средства согласно первому варианту осуществления, будут обозначены теми же ссылочными номерами, что и соответствующие элементы и части устройства 10 для управления сиденьем транспортного средства, и их описание может быть пропущено.
[0074] Между тем, в зависимости от продольной позиции сиденья 14 транспортного средства, во время лобового столкновения транспортного средства 12, ноги пассажира P, сидящего на сиденье 14 транспортного средства, могут быть ограничены приборной панелью (наколенной панелью) 39, подушкой безопасности для коленей (не показана) или т.п. в некоторых случаях. В этом случае явление проскальзывания под поясной ветвью ремня безопасности едва ли возникает. Следовательно, как показано на фиг. 4 и фиг. 5, в устройстве 38 для управления сиденьем транспортного средства согласно настоящему варианту осуществления, принимая во внимание продольную позицию сиденья 14 транспортного средства (подушки 20 сиденья), пороговое значение допустимого угла наклона θ спинки 22 сиденья задается. Продольная позиция сиденья 14 транспортного средства (подушки 20 сиденья) обнаруживается посредством датчика 40 позиции сиденья, и датчик 40 позиции сиденья электрически соединяется с ЭБУ 32.
[0075] Когда ЭБУ 32 определяет, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство 12 движется, ЭБУ 32 определяет допустимый угол наклона θ на основе скорости V1, полученной сложением вместе скорости транспортного средства 12 (скорости рассматриваемого транспортного средства) и предельной скорости дороги (предельной скорости встречной полосы движения), записанной заранее в навигационной системе 36, и продольной позиции сиденья 14 транспортного средства.
[0076] Как показано на фиг. 5 и фиг. 6, в состоянии, в котором продольная позиция сиденья 14 транспортного средства располагается в задней области 42, ЭБУ 32 задает пороговое значение допустимого угла наклона θ меньшим по сравнению с состоянием, в котором продольная позиция сиденья 14 транспортного средства располагается в передней области 44 (см. фиг. 4). В состоянии, в котором продольная позиция сиденья 14 транспортного средства располагается в промежуточной области 46, ЭБУ 32 задает пороговое значение θ допустимого угла наклона θ меньшим по сравнению с пороговым значением в состоянии, в котором продольная позиция сиденья 14 транспортного средства располагается в передней области 44 (см. фиг. 4), и задает пороговое значение θ для допустимого угла наклона θ большим по сравнению с пороговым значением в состоянии, в котором продольная позиция сиденья 14 транспортного средства располагается в задней области 42 (см. фиг. 5). В настоящем варианте осуществления, в качестве примера, в состоянии, в котором продольная позиция сиденья 14 транспортного средства располагается в промежуточной области 46, ЭБУ 32 определяет допустимый угол наклона θ как θ2, когда скорость V1, полученная сложением вместе скорости рассматриваемого транспортного средства и предельной скорости встречной полосы движения, больше v2 км/ч. Дополнительно, в состоянии, в котором продольная позиция сиденья 14 транспортного средства располагается в передней области 44, ЭБУ 32 задает допустимый угол наклона θ как θ2, когда скорость V1, полученная сложением вместе скорости рассматриваемого транспортного средства и предельной скорости встречной полосы движения, больше v2+10 км/ч. Дополнительно, в состоянии, в котором продольная позиция сиденья 14 транспортного средства располагается в задней области 42, ЭБУ 32 определяет допустимый угол наклона θ как θ2, когда скорость V1, полученная сложением вместе скорости рассматриваемого транспортного средства и предельной скорости встречной полосы движения, больше v2-10 км/ч.
[0077] Здесь, задняя область 42 является областью, в которой сиденье 14 транспортного средства позиционируется дальше в заднюю сторону по сравнению с заданной позицией (например, позиция на 200 мм позади позиции, где сиденье 14 транспортного средства располагается на самой передней стороне. Кроме того, передняя область 44 является областью, простирающейся в диапазоне от позиции, где сиденье 14 транспортного средства располагается на самой передней стороне до 100 мм за этой позицией, в качестве примера. Промежуточная область 46 - это область, находящаяся между задней областью 42 и передней областью 44.
[0078] Когда ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, ЭБУ 32 определяет допустимый угол наклона θ на основе скорости транспортного средства 12 (скорости рассматриваемого транспортного средства) и продольной позиции сиденья 14 транспортного средства. Отметим, что обработка посредством ЭБУ 32 в этом случае является такой же, что и для первого варианта осуществления за исключения принятия во внимание продольной позиции сиденья 14 транспортного средства на этапе S05 на фиг. 1C.
[0079] Как описано выше, в настоящем варианте осуществления, мотор 30 управляется посредством задания допустимого угла наклона θ на основе наличия или отсутствия дорожного разделителя, продольной позиции сиденья 14 транспортного средства, скорости V1, полученной сложением вместе скорости рассматриваемого транспортного средства и предельной скорости встречной полосы движения, и т.п. Т.е., когда сиденье 14 транспортного средства располагается в позиции, где явление проскальзывания под поясной ветвью ремня безопасности вероятно должно возникать, и когда предполагается наличие высокого ускорения замедления во время лобового столкновения транспортного средства 12, ЭБУ 32 управляет мотором 30, чтобы задавать угол наклона θ меньшим. Тем самым, во время столкновения с транспортным средством, движущимся по встречной полосе движения, возникновение явления проскальзывания под поясной ветвью ремня безопасности и ухудшение характеристики удерживания верхней части тела сидящего пассажира P уменьшаются, и увеличение в величине повреждения сидящего пассажира P также уменьшается. Отметим, что обработка посредством ЭБУ 32 настоящего варианта осуществления является практически такой же, что и обработка, показанная на фиг. 1C, за исключением принятия во внимание продольной позиции сиденья 14 транспортного средства.
[0080] Дополнительно, может быть выполнена конфигурация, что, после того как режим вождения переключается с ручного вождения на автоматическое вождение, пассажир P, сидящий на спинке 14 сиденья, может принимать комфортную позу, перемещая сиденье 14 транспортного средства назад автоматически или посредством действия переключения пассажиром. Даже в этой конфигурации возможно уменьшать увеличение в величине повреждения пассажира P, ограничивая перемещение назад сиденья 14 транспортного средства, как описано выше.
Устройство 48 для управления сиденьем транспортного средства согласно третьему варианту осуществления
[0081] Устройство 48 для управления сиденьем транспортного средства согласно третьему варианту осуществления настоящего изобретения будет описано со ссылкой на фиг. 7-9. Отметим, что в устройстве 48 для управления сиденьем транспортного средства согласно третьему варианту осуществления, элементы и части, соответствующие элементам и частям устройства 10 для управления сиденьем транспортного средства согласно первому варианту осуществления, будут обозначены теми же ссылочными номерами, что и соответствующие элементы и части устройства 10 для управления сиденьем транспортного средства, и их описание может быть пропущено.
[0082] Как описано выше, в зависимости от продольной позиции сиденья 14 транспортного средства, во время лобового столкновения транспортного средства 12, ноги пассажира P, сидящего на сиденье 14 транспортного средства, могут быть ограничены приборной панелью 39, подушкой безопасности для коленей или т.п. в некоторых случаях. В этом случае явление проскальзывания под поясной ветвью ремня безопасности едва ли возникает. Следовательно, как показано на фиг. 7 и фиг. 8, в устройстве 48 для управления сиденьем транспортного средства согласно настоящему варианту осуществления, принимая во внимание позицию (по большей части, продольную, поперечную и вертикальную позиции) коленей P4 пассажира P, сидящего на сиденье 14 транспортного средства, пороговое значение допустимого угла наклона θ спинки 22 сиденья задается. Позиция коленей P4 пассажира P, сидящего на сиденье 14 транспортного средства, обнаруживается посредством камеры 50 обнаружения коленей, и камера 50 обнаружения коленей электрически соединяется с ЭБУ 32.
[0083] Когда ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, ЭБУ 32 определяет допустимый угол наклона θ на основе позиции коленей P4 пассажира P, сидящего на сиденье 14 транспортного средства, также как скорости V1, полученной сложением вместе скорости транспортного средства 12 (скорости рассматриваемого транспортного средства) и предельной скорости дороги (предельной скорости встречной полосы), записанной заранее в навигационной системе 36.
[0084] Как показано на фиг. 8 и фиг. 9, вследствие заднего размещения продольной позиции сиденья 14 транспортного средства и т.д., когда состояние 52, когда трудно ограничивать колени P4 приборной панелью 39 или т.п., обнаруживается посредством камеры 50 обнаружения коленей, ЭБУ 32 задает пороговое значение допустимого угла наклона θ меньшим по сравнению с пороговым значением в состоянии 54, когда определяется, что колени P4 пассажира P, сидящего на сиденье 14 транспортного средства, могут быть ограничены приборной панелью 39 или т.п. (состояние, в котором пассажир P сидит без скрещивания ног, как показано на фиг. 7). В настоящем варианте осуществления, в качестве примера, в состоянии 52, когда трудно ограничивать колени P4 пассажира P, сидящего на сиденье 14 транспортного средства, приборной панелью 39 или т.п. во время лобового столкновения, когда скорость V1, полученная сложением вместе скорости рассматриваемого транспортного средства и предельной скорости встречной полосы, больше v2-10 км/ч, ЭБУ 32 определяет допустимый угол наклона θ как θ2. В состоянии 54, когда определяется, что колени P4 пассажира P, сидящего на сиденье 14 транспортного средства, могут быть ограничены приборной панелью 39 и т.п., когда скорость V1, полученная сложением вместе скорости рассматриваемого транспортного средства и предельной скорости встречной полосы движения, больше v2+10 км/ч, ЭБУ 32 определяет допустимый угол наклона θ как θ2.
[0085] Даже в случае, в котором продольная позиция сиденья 14 транспортного средства располагается на передней стороне, когда состояние 52, в котором трудно ограничивать колени P4 приборной панелью 39 или т.п., обнаруживается посредством камеры 50 обнаружения коленей, так как пассажир P, сидящий на сиденье 14 транспортного средства, скрещивает ноги или т.п., ЭБУ 32 задает пороговое значение допустимого угла наклона θ меньшим по сравнению с пороговым значением в состоянии 54, в котором определяется, что колени P4 пассажира P, сидящего на сиденье 14 транспортного средства, могут быть ограничены приборной панелью 39 или т.п. (состояние, в котором пассажир P сидит без скрещивания ног, как показано на фиг. 7). Отметим, что обработка посредством ЭБУ 32 настоящего варианта осуществления является практически такой же, что и обработка, показанная на фиг. 1C, за исключением принятия во внимание продольной позиции сиденья 14 транспортного средства и коленей P4 пассажира P.
[0086] Когда ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, ЭБУ 32 определяет допустимый угол наклона θ на основе скорости транспортного средства 12 (скорости рассматриваемого транспортного средства) и позиции коленей P4 пассажира P, сидящего на сиденье 14 транспортного средства. Отметим, что обработка посредством ЭБУ 32 в этом случае является такой же, что и обработка первого варианта осуществления, за исключением принятия во внимание позиции коленей P4 пассажира P на этапе S05 на фиг. 1C.
[0087] Как описано выше, в настоящем варианте осуществления, мотор 30 управляется посредством задания порогового значения допустимого угла наклона θ на основе наличия или отсутствия дорожного разделителя, позиции коленей P4 пассажира P, сидящего на сиденье 14 транспортного средства, скорости V1, полученной сложением вместе скорости рассматриваемого транспортного средства и предельной скорости встречной полосы движения, и т.п. Т.е., ЭБУ 32 управляет мотором 30, чтобы задавать угол наклона θ небольшим, когда предполагается, что ускорение замедления становится выше во время лобового столкновения транспортного средства 12, и когда пассажир P сидит на сиденье 14 транспортного средства в состоянии, в котором явление проскальзывания под поясной ветвью ремня безопасности вероятно должно возникать. Таким образом, во время столкновения с транспортным средством, движущимся по встречной полосе движения, возможно уменьшать возникновение явления проскальзывания под поясной ветвью ремня безопасности и ухудшения характеристики удерживания верхней части тела сидящего пассажира P, чтобы, таким образом, уменьшать увеличение в величине повреждения сидящего пассажира P.
Устройство 56 для управления сиденьем транспортного средства согласно четвертому варианту осуществления
[0088] Устройство 56 для управления сиденьем транспортного средства согласно четвертому варианту осуществления настоящего изобретения будет описано со ссылкой на фиг. 10-12. Отметим, что в устройстве 56 для управления сиденьем транспортного средства согласно четвертому варианту осуществления, элементы и части, соответствующие элементам и частям устройства 10 для управления сиденьем транспортного средства согласно первому варианту осуществления, будут обозначены теми же ссылочными номерами, что и соответствующие элементы и части устройства 10 для управления сиденьем транспортного средства, и их описание может быть пропущено.
[0089] Между тем, в конфигурации, в которой подушка 58 безопасности разворачивается из рулевого колеса 18 во время лобового столкновения транспортного средства, важно предотвращать ухудшение характеристики удерживания головы P3 пассажира P, сидящего на сиденье 14 транспортного средства, посредством подушки 58 безопасности во время лобового столкновения транспортного средства 12. Следовательно, как показано на фиг. 10 и фиг. 11, в устройстве 56 для управления сиденьем транспортного средства настоящего варианта осуществления, с учетом позиции (главным образом, продольной и вертикальной позиций) головы P3 пассажира P, сидящего на сиденье 14 транспортного средства, т.е., с учетом расстояния между головой P3 пассажира P, сидящего на сиденье 14 транспортного средства, и подушкой 58 безопасности после разворачивания, пороговое значение допустимого угла наклона θ спинки 22 сиденья задается. В настоящем варианте осуществления, во время автоматического вождения транспортного средства 12, расстояние L между головой P3 пассажира P, сидящего на сиденье 14 транспортного средства, и подушкой 58 безопасности после разворачивания, как предполагается, должно быть в пределах от l1 (900 мм) до l2 (1200 мм), например. Позиция головы P3 пассажира P, сидящего на сиденье 14 транспортного средства, обнаруживается посредством камеры 60 обнаружения головы, и камера 60 обнаружения головы электрически соединяется с ЭБУ 32.
[0090] Когда ЭБУ 32 определяет, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство 12 движется, ЭБУ 32 определяет допустимый угол наклона θ на основе скорости V1, полученной сложением вместе скорости транспортного средства 12 (скорости рассматриваемого транспортного средства) и предельной скорости дороги (предельной скорости встречной полосы движения), записанной заранее в навигационной системе 36, также как позиции головы P3 пассажира P, сидящего на сиденье 14 транспортного средства.
[0091] Как показано на фиг. 11 и фиг. 12, вследствие заднего размещения продольной позиции сиденья 14 транспортного средства и т.д., когда состояние 62, в котором голову P3 пассажира P трудно удерживать посредством подушки 58 безопасности, обнаруживается посредством камеры 60 для обнаружения головы, ЭБУ 32 задает пороговое значение допустимого угла наклона θ меньшим по сравнению с пороговым значением в состоянии 64, в котором определяется, что голова P3 пассажира P, сидящего на сиденье 14 транспортного средства, может быть ограничена подушкой 58 безопасности или т.п. (см. фиг. 10).
[0092] Когда ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, ЭБУ 32 определяет допустимый угол наклона θ на основе скорости транспортного средства 12 (скорости рассматриваемого транспортного средства) и позиции головы P3 пассажира P, сидящего на сиденье 14 транспортного средства. Отметим, что обработка посредством ЭБУ 32 в этом случае является такой же, что и обработка первого варианта осуществления, за исключением принятия во внимание позиции головы P3 пассажира P на этапе S05 на фиг. 1C.
[0093] Как описано выше, в настоящем варианте осуществления, мотор 30 управляется посредством задания порогового значения допустимого угла наклона θ на основе наличия или отсутствия дорожного разделителя, позиции головы P3 пассажира P, сидящего на сиденье 14 транспортного средства, скорости, полученной сложением вместе скорости рассматриваемого транспортного средства и предельной скорости встречной полосы движения, и т.п. Т.е., ЭБУ 32 управляет мотором 30, чтобы задавать угол наклона θ меньшим, когда ускорение замедления транспортного средства 12, как предполагается, должно быть более высоким во время лобового столкновения транспортного средства 12, и когда характеристика удерживания головы P3 пассажира P посредством подушки 58 безопасности может становиться ухудшенной. Таким образом, во время столкновения с транспортным средством, движущимся по встречной полосе, возможно уменьшать ухудшение характеристики удерживания головы P3 сидящего пассажира P, а также уменьшать увеличение в величине повреждения сидящего пассажира P. Отметим, что обработка посредством ЭБУ 32 настоящего варианта осуществления является практически такой же, что и обработка, показанная на фиг. 1C, за исключением принятия во внимание продольной позиции сиденья 14 транспортного средства и позиции P3 головы пассажира P.
Устройство 66 для управления сиденьем транспортного средства согласно пятому варианту осуществления
[0094] Устройство 66 для управления сиденьем транспортного средства согласно пятому варианту осуществления настоящего изобретения будет описано со ссылкой на фиг. 13 и фиг. 14. Отметим, что в устройстве 66 для управления сиденьем транспортного средства согласно пятому варианту осуществления, элементы и части, соответствующие элементам и частям устройства 10 для управления сиденьем транспортного средства согласно первому варианту осуществления, будут обозначены теми же ссылочными номерами, что и соответствующие элементы и части устройства 10 для управления сиденьем транспортного средства, и их описание может быть пропущено.
[0095] Как описано выше, в зависимости от продольной позиции сиденья 14 транспортного средства, ноги пассажира P, сидящего на сиденье 14 транспортного средства, могут быть ограничены приборной панелью 39 или подушкой безопасности для коленей (не показана), или т.п. во время лобового столкновения транспортного средства 12 в некоторых случаях. По этой причине, как показано на фиг. 13 и фиг. 14, в устройстве 66 для управления сиденьем транспортного средства настоящего варианта осуществления, допустимая позиция в перемещении назад сиденья 14 транспортного средства (подушки 20 сиденья) задается в зависимости от наличия или отсутствия дорожного разделителя. Продольная позиция сиденья 14 транспортного средства (подушки 20 сиденья) обнаруживается посредством датчика 40 позиции сиденья, и сиденье 14 транспортного средства перемещается в продольном направлении посредством приведения в действие мотора 68 для скольжения сиденья в качестве актуатора. Датчик 40 позиции сиденья и мотор 68 электрически соединяются с ЭБУ 32.
[0096] Когда ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, ЭБУ 32 задает допустимую позицию D в перемещении назад сиденья14 транспортного средства в d2, как показано на фиг. 14. Соответственно, в случае, в котором дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, сиденье 14 транспортного средства может быть перемещено в продольном направлении в диапазоне между позицией, где сиденье 14 транспортного средства находится на самой передней стороне, и допустимой позицией d2. Когда мотор 68 приводится в действие, сиденье 14 транспортного средства перемещается назад; а когда сиденье 14 транспортного средства достигает позиции d2, работа мотора 68 прекращается.
[0097] С другой стороны, когда ЭБУ 32 определяет, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство 12 движется, ЭБУ 32 задает допустимую позицию D в перемещении назад сиденья 14 транспортного средства в d1, показанную на фиг. 13, которая находится дальше вперед по сравнению с d2 (см. фиг. 14). Таким образом, когда дорожный разделитель не предусмотрен на дороге, по которой транспортное средство 12 движется, возможно перемещать сиденье 14 транспортного средства в продольном направлении в диапазоне между позицией, где сиденье 14 транспортного средства находится на самой передней стороне, и допустимой позицией d1. Более конкретно, когда мотор 68 приводится в действие, сиденье 14 транспортного средства перемещается назад; а когда сиденье 14 транспортного средства достигает позиции d1, работа мотора 68 прекращается.
[0098] Как описано выше, в настоящем варианте осуществления, мотор 68 управляется посредством задания допустимой позиции D (пороговое значение) в перемещении назад сиденья 14 транспортного средства на основе наличия или отсутствия дорожного разделителя. Т.е., когда предполагается иметь высокое ускорение замедления во время лобового столкновения транспортного средства 12, и когда сиденье 14 транспортного средства располагается в позиции, где явление проскальзывания под поясной ветвью ремня безопасности вероятно должно возникать, ЭБУ 32 управляет мотором 68 с тем, чтобы предохранять расстояние в продольном направлении между коленями P4 пассажира P, сидящего на сиденье 14 транспортного средства, и приборной панелью 39 или т.п. от становления более длинным. Таким образом, во время столкновения с транспортным средством, движущимся по встречной полосе, возможно уменьшать возникновение явления проскальзывания под поясной ветвью ремня безопасности и уменьшать увеличение в величине повреждения сидящего пассажира P. Отметим, что обработка посредством ЭБУ 32 посредством настоящего варианта осуществления является практически такой же, что и обработка, показанная на фиг. 1C, за исключением того, что вместо допустимого угла наклона θ ограничивается допустимая позиция в перемещении назад сиденья 14 транспортного средства.
Устройство 70 для управления сиденьем транспортного средства согласно шестому варианту осуществления
[0099] Устройство 70 для управления сиденьем транспортного средства согласно шестому варианту осуществления настоящего изобретения будет описано со ссылкой на фиг. 15 и фиг. 16. Отметим, что в устройстве 70 для управления сиденьем транспортного средства согласно шестому варианту осуществления, элементы и части, соответствующие элементам и частям устройства 10 для управления сиденьем транспортного средства согласно первому варианту осуществления, будут обозначены теми же ссылочными номерами, что и соответствующие элементы и части устройства 10 для управления сиденьем транспортного средства, и их описание может быть пропущено.
[0100] Как показано на фиг. 15, устройство 70 для управления сиденьем транспортного средства настоящего варианта осуществления может получать информацию о дороге, по которой транспортное средство 12 движется, посредством беспроводной связи и задавать пороговое значение допустимого угла наклона θ на основе информации о дороге, полученной посредством беспроводной связи. В частности, ЭБУ 32 может получать информацию динамической карты 72 посредством беспроводной связи.
[0101] Здесь, динамическая карта 72 является высокоточной трехмерной картой, включающей в себя различную информацию о дороге, по которой транспортное средство 12 движется, и является картой, главным образом, включающей в себя "статическую информацию 74", "квазистатическую информацию 76", "квазидинамическую информацию 78" и "динамическую информацию 80". Статическая информация 74 является картографической информацией в качестве основы для динамической карты, касающейся дорог, дорожных конструкций на дорогах, информации о полосе движения, информации о поверхности дороги и постоянной нормативной информацией, и эта статическая информация обновляется в каждом заданном периоде. Квазистатическая информация 76 является информацией, включающей в себя: информацию о регулировании дорожного движения о дорожных работах и событиях; погодную информацию для широкой области; и прогноз дорожных пробок, и другие данные, и является информацией, которая обновляется более часто по сравнению со статической информацией 74. Квазидинамическая информация 78 является информацией, включающей в себя: фактические условия дорожного движения и временные ограничения движения временные условия остановки движения, такие как падающие объекты и неисправные транспортные средства, фактические условия дорожных происшествий и погодную информацию для узкой области, и т.д., в местоположении или рядом с местоположением, где транспортное средство 12 движется, и эта информация обновляется более часто по сравнению с квазистатической информацией 76. Динамическая информация 80 включает в себя: информацию, передаваемую и обмениваемую между транспортными средствами; информацию для отображения сигнала; информацию о пешеходах и велосипедах на перекрестке; и информацию о транспортных средствах, движущихся прямо на перекрестке, и эта информация обновляется более часто по сравнению с квазидинамической информацией 78.
[0102] Как показано на фиг. 15 и фиг. 16, когда ЭБУ 32 определяет, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство 12 движется, на основе информации динамической карты 72, ЭБУ 32 определяет допустимый угол наклона θ на основе скорости V3, полученной сложением вместе скорости транспортного средства 12 (скорости рассматриваемого транспортного средства) и расчетной скорости встречного транспортного средства. "Скорость транспортного средства 12 (скорость рассматриваемого транспортного средства)" является заданной скоростью или фактической скоростью транспортного средства 12 во время автоматического вождения. Кроме того, ценная скорость встречного транспортного средства является скоростью движения встречного транспортного средства, рассчитанной из информации динамической карты 72, и обозначает среднюю скорость движения, предельную скорость для встречной полосы и т.п. для встречного транспортного средства, движущегося по встречной полосе, противоположной полосе, где движется транспортное средство 12.
[0103] Когда скорость V3, полученная сложением вместе скорости рассматриваемого транспортного средства и расчетной скорости встречного транспортного средства, равна 0 км/ч или более и v1 км/ч или менее, ЭБУ 32 определяет допустимый угол наклона θ как θ1. Когда скорость V3, полученная сложением вместе скорости рассматриваемого транспортного средства и расчетной скорости встречного транспортного средства, больше v2 км/ч, ЭБУ 32 определяет допустимый угол наклона θ как θ2. Дополнительно, когда скорость V3, полученная сложением вместе скорости рассматриваемого транспортного средства и расчетной скорости встречного транспортного средства, больше v1 км/ч и меньше v2 км/ч, ЭБУ 32 определяет допустимый угол наклона θ как угол θ3, который соответствует скорости v3, полученной сложением вместе скорости рассматриваемого транспортного средства и предельной скорости встречной полосы движения. В настоящем варианте осуществления θ3 вычисляется посредством пропорциональной интерполяции между (v1, θ1) и (v2, θ2), показанными на графике на фиг. 16. Вышеописанная обработка посредством ЭБУ 32 является такой же, что и вышеупомянутая обработка устройства 10 для управления сиденьем транспортного средства первого варианта осуществления, за исключением того, что допустимый угол наклона θ определяется на основе скорости V3.
[0104] Дополнительно, обновляя информацию динамической карты 72, допустимый угол наклона θ задается меньшим, когда средняя скорость движения встречного транспортного средства, движущегося по встречной полосе, становится более высокой, или когда предельная скорость для встречной полосы становится более высокой. В этом случае, ЭБУ 32 начинает возбуждение мотора 30. В результате, спинка 22 сиденья наклоняется на угол, равный или меньше порогового значения угла наклона θ, определенного после того, как информация динамической карты 72 обновляется.
[0105] Кроме того, когда информация динамической карты 72 обновляется, допустимый угол наклона θ может быть быстро уменьшен, когда средняя скорость движения встречного транспортного средства, движущегося по встречной полосе движения, быстро становится более высокой. В этом случае, даже когда ЭБУ 32 начинает возбуждение для мотора 30, спинка 22 сиденья не может быть быстро наклонена в некоторых случаях. В этом случае, ЭБУ 32 начинает возбуждение мотора 30 и активирует автоматическое торможение, чтобы наклонять спинку 22 сиденья вперед, также как замедлять транспортное средство 12. В дополнение к этому, ЭБУ 32 может быть сконфигурирован, чтобы выводить сигнал для освещения лампы или отображения для уведомления о замедлении транспортного средства 12 следующему за ним транспортному средству.
[0106] Здесь, когда ценная скорость встречного транспортного средства задается посредством объявления средней скорости движения встречного транспортного средства, движущегося по встречной полосе, допустимый угол наклона θ может быть задан более предпочтительно по сравнению со случаем, в котором ценная скорость встречного транспортного средства задается с помощью предельной скорости для встречной полосы движения. Например, когда средняя скорость движения встречного транспортного средства, движущегося по встречной полосе движения, ниже предельной скорости для встречной полосы движения, допустимый угол θ наклона может быть больше угла наклона в случае задания расчетной скорости встречного транспортного средства с помощью предельной скорости для встречной полосы движения.
[0107] Когда ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, на основе информации динамической карты 72, ЭБУ 32 определяет допустимый угол наклона θ на основе скорости V2 (скорости рассматриваемого транспортного средства) транспортного средства 12, как показано на фиг. 3. Т.е., когда ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, на основе информации динамической карты 72, та же обработка, что и обработка первого варианта осуществления, выполняется. Допустимый угол наклона θ может быть определен на основе расчетной скорости транспортного средства 12. Здесь, ценная скорость транспортного средства 12 является скоростью движения транспортного средства 12, рассчитанной из информации динамической карты 72, которая включает в себя среднюю скорость движения транспортных средств, движущихся по полосе, где транспортное средство 12 движется, предельной скорости полосы движения, где транспортное средство 12 движется, и прочее. Отметим, что обработка посредством ЭБУ 32 настоящего варианта осуществления является почти такой же, что и обработка, показанная на фиг. 1C, за исключением принятия во внимание информации из динамической карты 72.
[0108] Даже в случае, в котором ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, на основе статической информации 74 динамической карты 72, когда ЭБУ 32 определяет, что двухстороннее движение действует на дороге, по которой транспортное средство 12 движется, на основе квазистатической информации 76 и квазидинамической информации 78 динамической карты 72, ЭБУ 32 определяет допустимый угол наклона θ, предполагая, что дорожный разделитель не предусмотрен, как показано на фиг. 16. Это означает, что ЭБУ 32 во время переключения управления с управления для случая, в котором дорожный разделитель предусмотрен, на управление для случая, в котором дорожный разделитель не предусмотрен, управляет сиденьем 14 транспортного средства.
[0109] В настоящем варианте осуществления пороговое значение допустимого угла наклона θ задается на основе информации динамической карты 72; и аналогично пороговое значение допустимой позиции в перемещении назад сиденья 14 транспортного средства может быть задано на основе информации динамической карты 72.
Устройство 82 для управления сиденьем транспортного средства согласно седьмому варианту осуществления
[0110] Устройство 82 для управления сиденьем транспортного средства согласно седьмому варианту осуществления настоящего изобретения будет описано со ссылкой на фиг. 16 и фиг. 17. Отметим, что в устройстве 82 для управления сиденьем транспортного средства согласно седьмому варианту осуществления, элементы и части, соответствующие элементам и частям устройства 10 для управления сиденьем транспортного средства согласно первому варианту осуществления, будут обозначены теми же ссылочными номерами, что и соответствующие элементы и части устройства 10 для управления сиденьем транспортного средства, и их описание может быть пропущено.
[0111] Как показано на фиг. 17, устройство 82 для управления сиденьем транспортного средства согласно настоящему варианту осуществления может получать информацию о встречном транспортном средстве 84 посредством беспроводной связи в качестве связи между транспортными средствами и задает пороговое значение допустимого угла наклона θ на основе информации о встречном транспортном средстве 84, полученной посредством этой беспроводной связи. В устройстве 82 для управления сиденьем транспортного средства настоящего варианта осуществления ЭБУ 32 может получать вышеописанную информацию из навигационной системы 36 (см. фиг. 1B) и вышеописанной информации динамической карты 72 (см. фиг. 15).
[0112] Когда ЭБУ 32 определяет, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство 12 движется, на основе информации из навигационной системы 36 или информации динамической карты 72, как показано на фиг. 16 и фиг. 17, ЭБУ 32 определяет допустимый угол наклона θ на основе скорости V3, полученной сложением вместе скорости транспортного средства 12 (скорости рассматриваемого транспортного средства) и расчетной скорости встречного транспортного средства 84. "Скорость транспортного средства 12 (скорость рассматриваемого транспортного средства)" является заданной скоростью или фактической скоростью транспортного средства 12 во время автоматического вождения. Дополнительно, ценная скорость встречного транспортного средства 84 является скоростью движения встречного транспортного средства 84, рассчитанной из информации, если информация о встречном транспортном средстве 84 уже получена посредством беспроводной связи. Ценная скорость встречного транспортного средства 84 определяется на основе информации, такой как маршрут движения и сигнал скорости, которые являются частью информации о встречном транспортном средстве 84, полученной посредством беспроводной связи. Обработка посредством ЭБУ 32, после того как ЭБУ 32 определяет расчетную скорость встречного транспортного средства 84, является такой же, что и вышеописанная обработка устройства 70 для управления сиденьем транспортного средства согласно шестому варианту осуществления.
[0113] Когда ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, на основе информации из навигационной системы 36 или информации динамической карты 72, как показано на фиг. 3, ЭБУ 32 определяет допустимый угол наклона θ на основе скорости V2 транспортного средства 12 (скорости рассматриваемого транспортного средства). Т.е., когда ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, на основе информации из навигационной системы 36 или информации динамической карты 72, та же обработка, что и обработка первого варианта осуществления, выполняется.
Устройство 86 для управления сиденьем транспортного средства согласно восьмому варианту осуществления
[0114] Устройство 86 для управления сиденьем транспортного средства согласно восьмому варианту осуществления настоящего изобретения будет описано со ссылкой на фиг. 16 и фиг. 18. Отметим, что в устройстве 86 для управления сиденьем транспортного средства согласно восьмому варианту осуществления, элементы и части, соответствующие элементам и частям устройства 10 для управления сиденьем транспортного средства согласно первому варианту осуществления, будут обозначены теми же ссылочными номерами, что и соответствующие элементы и части устройства 10 для управления сиденьем транспортного средства, и их описание может быть пропущено.
[0115] Как показано на фиг. 18, устройство 86 для управления сиденьем транспортного средства согласно настоящему варианту осуществления может получать информацию о скорости встречного транспортного средства 84 посредством радара 88 в качестве датчика, предусмотренного в транспортном средстве 12, и задает пороговое значение допустимого угла наклона θ на основе информации о скорости встречного транспортного средства 84, полученной посредством этого радара 88. Устройство 86 для управления сиденьем транспортного средства настоящего варианта осуществления может обнаруживать наличие или отсутствие дорожного разделителя посредством радара 88. В устройстве 86 для управления сиденьем транспортного средства настоящего варианта осуществления ЭБУ 32 может получать вышеописанную информацию из навигационной системы 36 (см. фиг. 1B) и вышеописанной информации динамической карты 72 (см. фиг. 15).
[0116] Когда ЭБУ 32 определяет, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство 12 движется, на основе информации из навигационной системы 36 или информации динамической карты 72, как показано на фиг. 16 и фиг. 18, ЭБУ 32 определяет допустимый угол наклона θ на основе скорости V3, полученной сложением вместе скорости транспортного средства 12 (скорости рассматриваемого транспортного средства) и расчетной скорости встречного транспортного средства 84. "Скорость транспортного средства 12 (скорость рассматриваемого транспортного средства)" является заданной скоростью или фактической скоростью транспортного средства 12 во время автоматического вождения. Дополнительно, ценная скорость встречного транспортного средства 84 является скоростью движения встречного транспортного средства 84, рассчитанной из информации о скорости, если информация о скорости для встречного транспортного средства 84 уже получена посредством радара 88. После того как информация о скорости для встречного транспортного средства 84 уже получена посредством радара 88, ЭБУ 32 определяет скорость движения встречного транспортного средства 84, соответствующую информации о скорости, в качестве расчетной скорости встречного транспортного средства 84. Обработка посредством ЭБУ 32, после того как ЭБУ 32 определяет расчетную скорость встречного транспортного средства 84, является такой же, что и вышеописанная обработка устройства 70 для управления сиденьем транспортного средства согласно шестому варианту осуществления.
[0117] Когда ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, на основе информации из навигационной системы 36, информации динамической карты 72 или информации от радара 88, как показано на фиг. 3, ЭБУ 32 определяет допустимый угол наклона θ на основе скорости V2 транспортного средства 12 (скорости рассматриваемого транспортного средства). Т.е., когда ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, на основе информации из навигационной системы 36 или информации динамической карты 72, та же обработка, что и обработка в первом варианте осуществления, выполняется.
Устройство 90 для управления сиденьем транспортного средства согласно девятому варианту осуществления
[0118] Устройство 90 для управления сиденьем транспортного средства согласно девятому варианту осуществления настоящего изобретения будет описано со ссылкой на фиг. 16 и фиг. 19. Отметим, что в устройстве 90 для управления сиденьем транспортного средства согласно девятому варианту осуществления, элементы и части, соответствующие элементам и частям устройства 10 для управления сиденьем транспортного средства согласно первому варианту осуществления, будут обозначены теми же ссылочными номерами, что и соответствующие элементы и части устройства 10 для управления сиденьем транспортного средства, и их описание может быть пропущено.
[0119] Как показано на фиг. 19, устройство 90 для управления сиденьем транспортного средства настоящего варианта осуществления может получать информацию о полосе движения, где, по меньшей мере, одно из транспортного средства 12 и встречного транспортного средства 84 движется, посредством пары из передней и задней камер 92 в качестве датчиков, предусмотренных в транспортном средстве 12, и задает пороговое значение допустимого угла наклона θ на основе информации о полосе движения, полученной посредством камер 92.
[0120] Когда ЭБУ 32 определяет, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство 12 движется, на основе информации от камер 92, ЭБУ 32 определяет допустимый угол θ наклона на основе скорости V3, полученной сложением вместе скорости транспортного средства 12 (скорости рассматриваемого транспортного средства) и расчетной скорости встречного транспортного средства 84. "Скорость транспортного средства 12 (скорость рассматриваемого транспортного средства)" является заданной скоростью или фактической скоростью транспортного средства 12 во время автоматического вождения. Дополнительно, ценная скорость встречного транспортного средства 84 является предельной скоростью для встречной полосы движения, указанной дорожным знаком 94, когда информация на дорожном знаке 94, которая является частью информации о встречной полосе движения, где встречное транспортное средство 84 движется, уже получена посредством только задней камеры 92 транспортного средства 12. В транспортном средстве 12, имеющем только переднюю камеру 92, предельная скорость, указанная на дорожном знаке 94 для полосы движения, где транспортное средство 12 движется, может быть определена как ценная скорость встречного транспортного средства 84. Обработка посредством ЭБУ 32, после того как ЭБУ 32 определяет расчетную скорость встречного транспортного средства 84, является такой же, что и вышеописанная обработка устройства 70 для управления сиденьем транспортного средства согласно шестому варианту осуществления.
[0121] Кроме того, когда ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, на основе информации от камер 92, допустимый угол наклона θ определяется на основе скорости V2 транспортного средства 12 (скорости рассматриваемого транспортного средства), как показано на фиг. 3. Т.е., когда ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, на основе информации от камер 92, та же обработка, что и обработка первого варианта осуществления, выполняется.
Устройство 96 для управления сиденьем транспортного средства согласно десятому варианту осуществления
[0122] Устройство 96 для управления сиденьем транспортного средства согласно десятому варианту осуществления настоящего изобретения будет описано со ссылкой на фиг. 20 и фиг. 21. Отметим, что в устройстве 96 для управления сиденьем транспортного средства согласно десятому варианту осуществления, элементы и части, соответствующие элементам и частям устройства 10 для управления сиденьем транспортного средства согласно первому варианту осуществления, будут обозначены теми же ссылочными номерами, что и соответствующие элементы и части устройства 10 для управления сиденьем транспортного средства, и их описание может быть пропущено.
[0123] Как показано на фиг. 20, устройство 96 для управления сиденьем транспортного средства согласно настоящему варианту осуществления, предусматривается в транспортном средстве 12, приспособленном для движения посредством автоматического вождения. Следовательно, замедление посредством автоматического торможения может ожидаться, когда столкновение с встречным транспортным средством 84 прогнозируется на основе информации от радара 88, камер 92 или т.п. Следовательно, устройство 96 для управления сиденьем транспортного средства настоящего варианта осуществления задает пороговое значение угла наклона θ, принимая во внимание величину α замедления транспортного средства 12, которая может ожидаться посредством автоматического торможения. Устройство 96 для управления сиденьем транспортного средства согласно настоящему варианту осуществления может получать вышеописанную информацию из навигационной системы 36 (см. фиг. 1B) или вышеописанной информации динамической карты 72 (см. фиг. 15).
[0124] Как показано на фиг. 20 и фиг. 21, когда ЭБУ 32 определяет, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство 12 движется, на основе информации из навигационной системы 36 или информации динамической карты 72, ЭБУ 32 определяет допустимый угол наклона θ на основе скорости V4, полученной сложением вместе расчетной скорости встречного транспортного средства 84 и скорости, полученной вычитанием величины α замедления, ожидаемой посредством автоматического торможения, из скорости транспортного средства 12 (скорости рассматриваемого транспортного средства), которая является расчетной скоростью транспортного средства 12. "Скорость транспортного средства 12 (скорость рассматриваемого транспортного средства)" является заданной скоростью или фактической скоростью транспортного средства 12 во время автоматического вождения. Кроме того, величина α замедления, которая может ожидаться посредством автоматического торможения, является переменной, которая изменяется в зависимости от скорости транспортного средства 12, условий поверхности дороги и т.п. и определяется из информации, записанной заранее в ЭБУ 32. Кроме того, ценная скорость встречного транспортного средства 84 является скоростью движения встречного транспортного средства 84, рассчитанной из информации динамической карты 72 и т.п. В последующем описании "скорость, полученная вычитанием величины α замедления, ожидаемой посредством автоматического торможения, из скорости транспортного средства 12 (скорости рассматриваемого транспортного средства)", называется "скоростью после замедления транспортного средства 12". Величина α замедления, которая может ожидаться посредством автоматического торможения, может быть определена на основе "международных стандартов для системы автоматического экстренного торможения (AEBS)", которые являются международными стандартами, установленными на 178-й встрече Мирового форума для согласования автомобильных стандартов (WP29) Организации Объединенных Наций. Согласно международным стандартам системы автоматического экстренного торможения (AEBS) указывается следующее: "во время движения со скоростью 40 км/ч не существует риска столкновения с неподвижным транспортным средством впереди"; "во время движения со скоростью 60 км/ч не существует риска столкновения с транспортным средством, движущимся впереди со скоростью 20 км/ч"; и "во время движения со скоростью 30 км/ч не существует риска столкновения с пешеходом, идущим и пересекающим дорогу со скоростью 5 км/ч".
[0125] Когда скоростью V4, полученная сложением вместе скорости после замедления транспортного средства 12 и расчетной скорости встречного транспортного средства 84, равна 8 км/ч или более и v1 км/ч или менее, ЭБУ 32 определяет допустимый угол наклона θ как θ1. Когда скорость V4, полученная сложением вместе скорости после замедления транспортного средства 12 и расчетной скорости встречного транспортного средства 84, больше v2 км/ч, ЭБУ 32 определяет допустимый угол наклона θ как θ2. Кроме того, когда скорость V4, полученная сложением вместе скорости после замедления транспортного средства 12 и расчетной скорости встречного транспортного средства 84, является скоростью v3, которая больше v1 км/ч и менее v2 км/ч, ЭБУ 32 задает допустимый угол наклона θ как угол θ3, соответствующий скорости V3, полученной сложением вместе скорости рассматриваемого транспортного средства и предельной скорости для встречной полосы движения встречного транспортного средства 84. В настоящем варианте осуществления θ3 вычисляется посредством пропорциональной интерполяции между (v1, θ1) и (v2, θ2), показанными на графике на фиг. 21.
[0126] Когда ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, на основе информации из навигационной системы 36 или информации динамической карты 72, ЭБУ 32 определяет допустимый угол наклона θ на основе скорости V2 транспортного средства 12 (скорости рассматриваемого транспортного средства), как показано на фиг. 3. Т.е., когда ЭБУ 32 определяет, что дорожный разделитель предусмотрен на дороге, по которой транспортное средство 12 движется, на основе информации из навигационной системы 36 или информации динамической карты 72, та же обработка, что и обработка первого варианта осуществления, выполняется.
[0127] В вышеописанном настоящем варианте осуществления допустимый угол θ наклона может быть задан более соответствующим образом, принимая во внимание величину α замедления транспортного средства 12, которая моет ожидаться посредством автоматического торможения. Т.е., в настоящем варианте осуществления, допустимый угол наклона θ может быть задан более значительным по сравнению со случаем без принятия во внимание величины α замедления транспортного средства 12, которая может ожидаться посредством автоматического торможения.
[0128] Устройство для управления сиденьем транспортного средства может быть сконфигурировано посредством взаимного объединения конфигураций и пороговых значений соответствующих вариантов осуществления, описанных выше. Дополнительно, устройство для управления сиденьем транспортного средства настоящего изобретения может быть применено к транспортному средству, которое может двигаться только посредством автоматического вождения.
[0129] Хотя один вариант осуществления настоящего изобретения был описан выше, настоящее изобретение не ограничивается вышеописанным вариантом осуществления, и различные модификации, отличные от вышеописанного варианта осуществления, могут быть реализованы без отступления от духа настоящего изобретения.

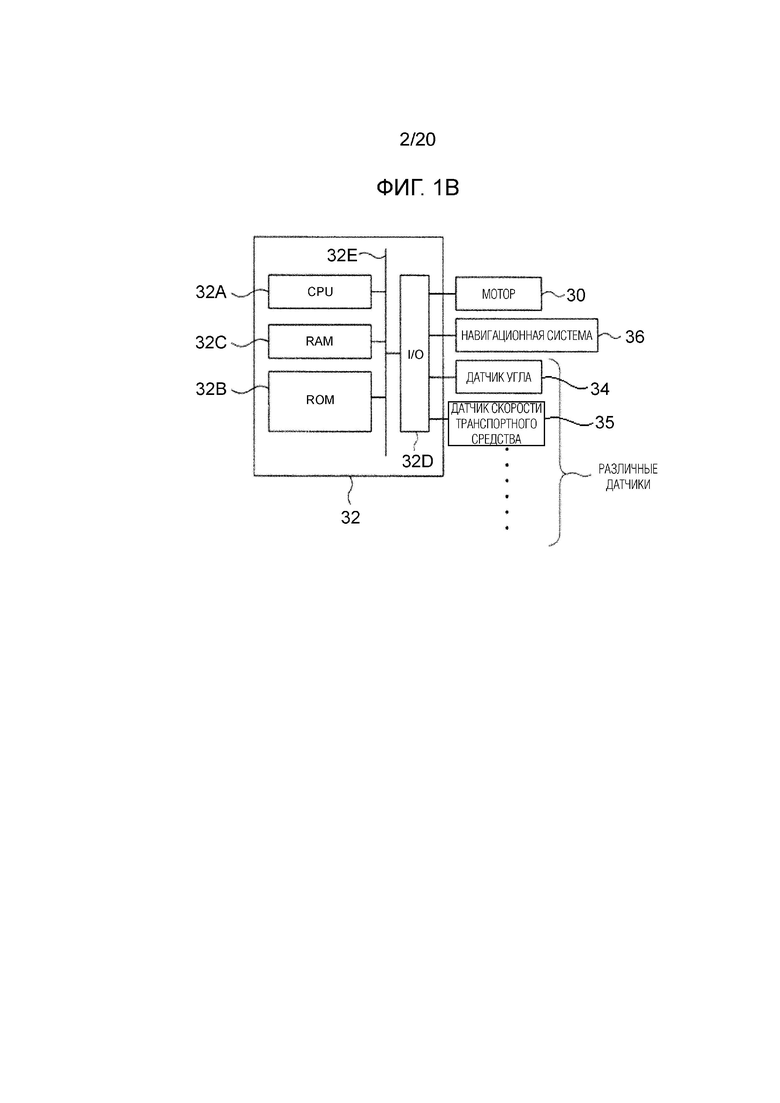



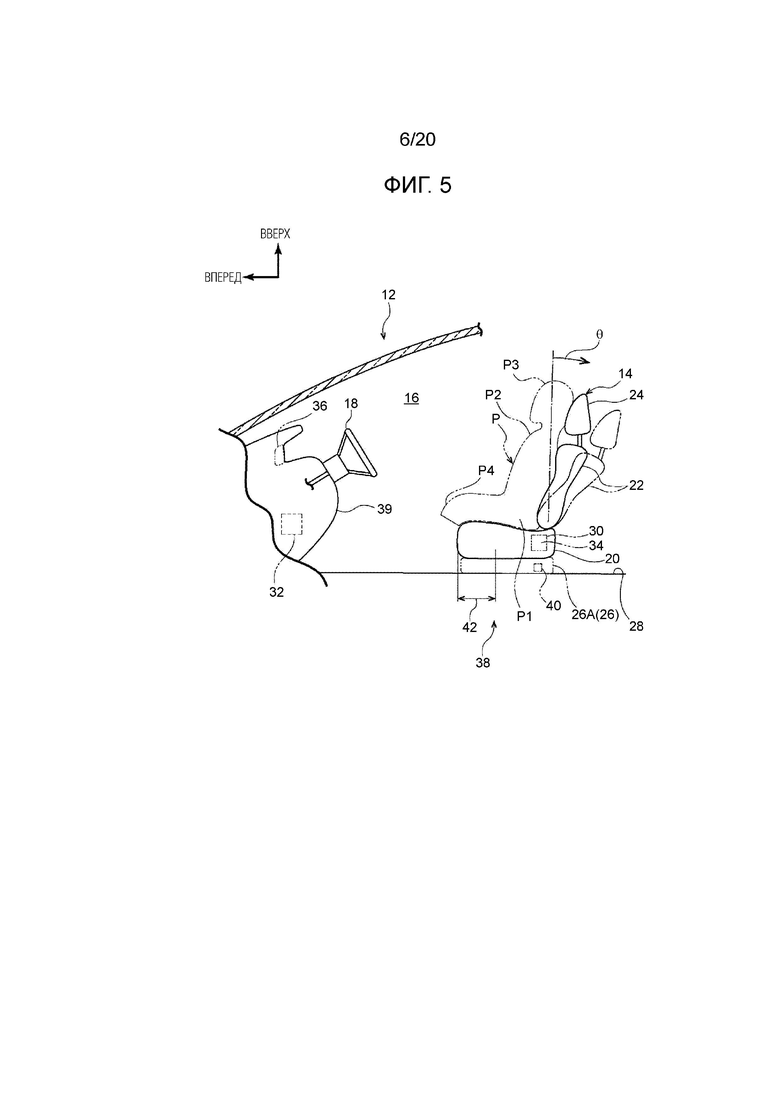



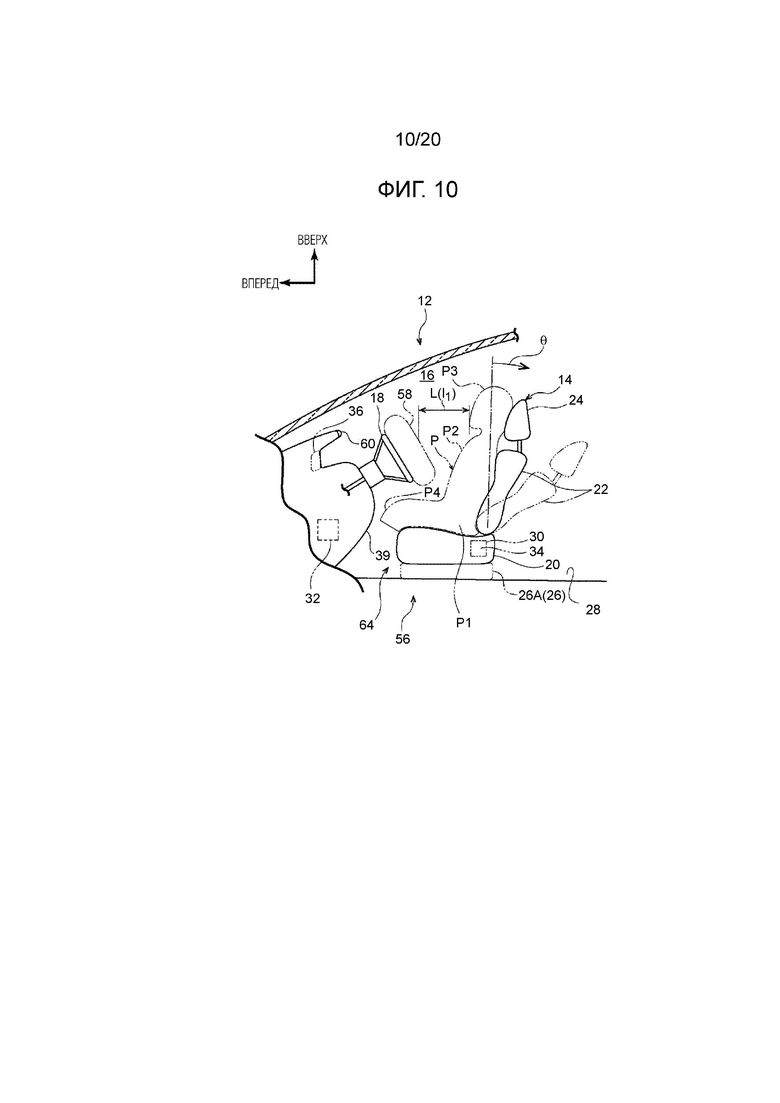


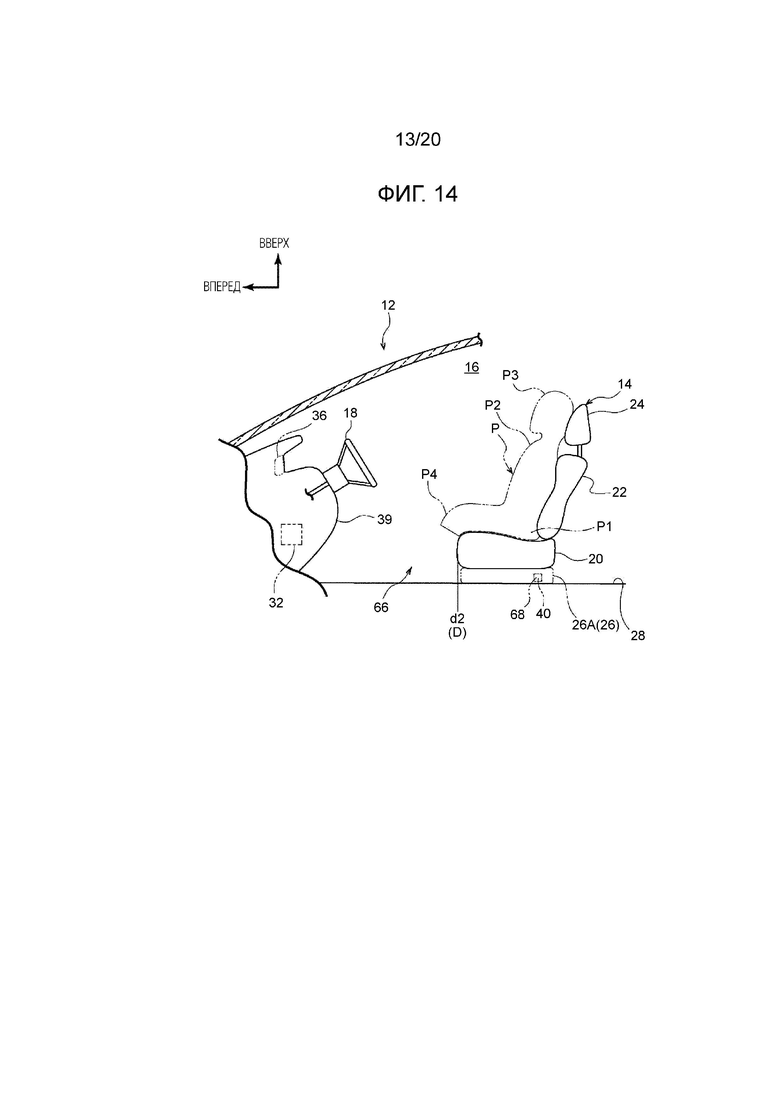



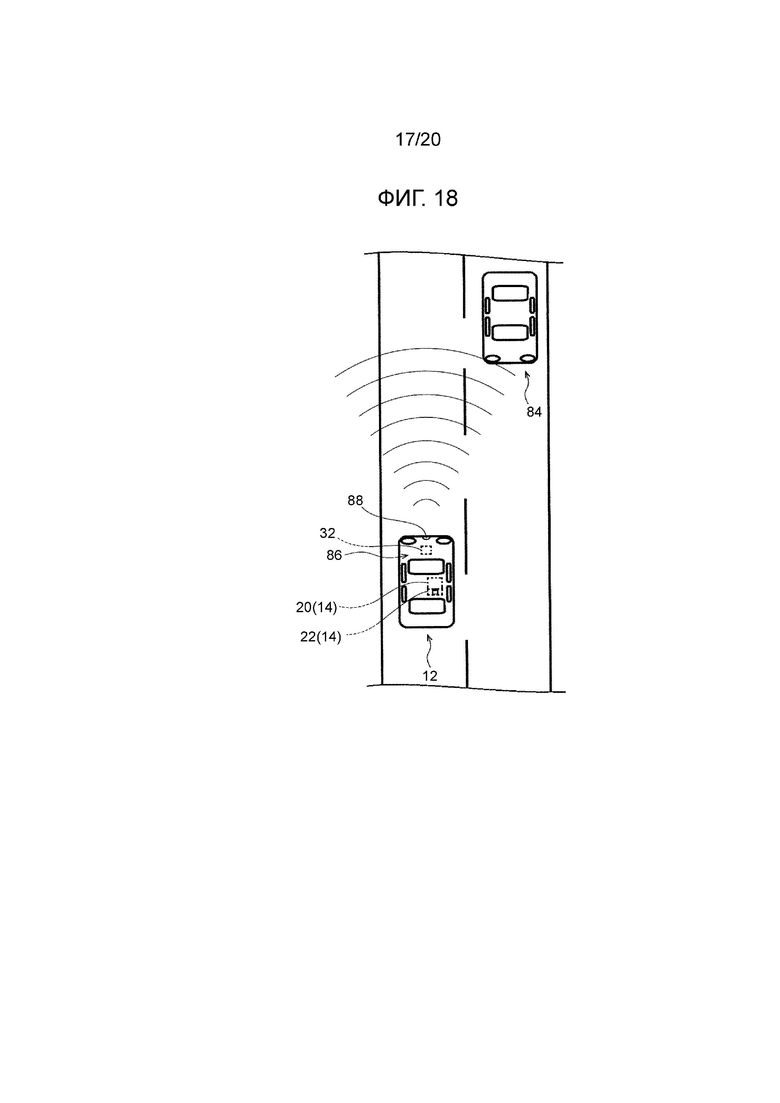
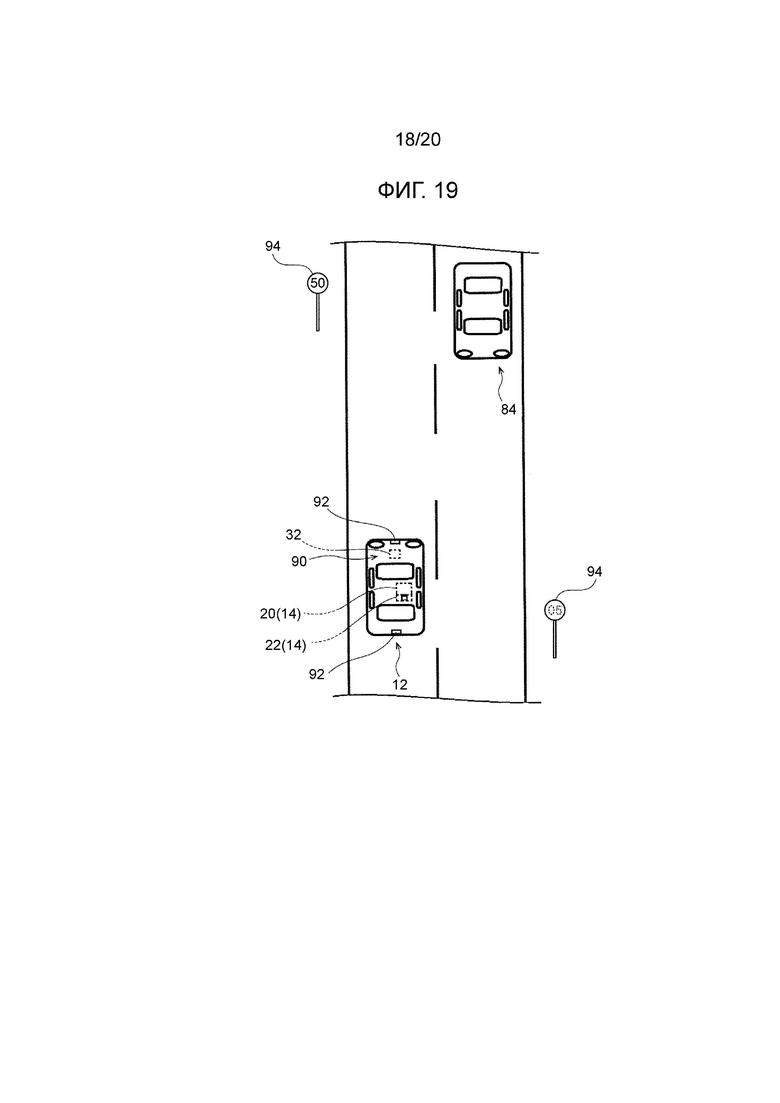
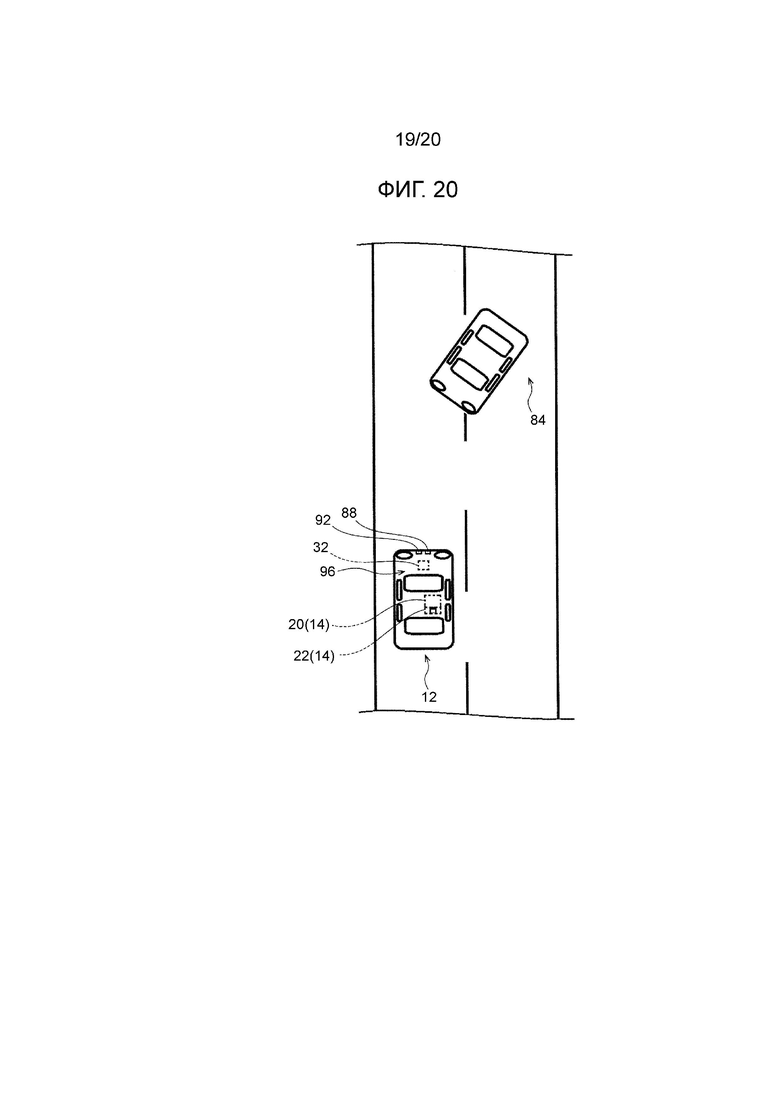
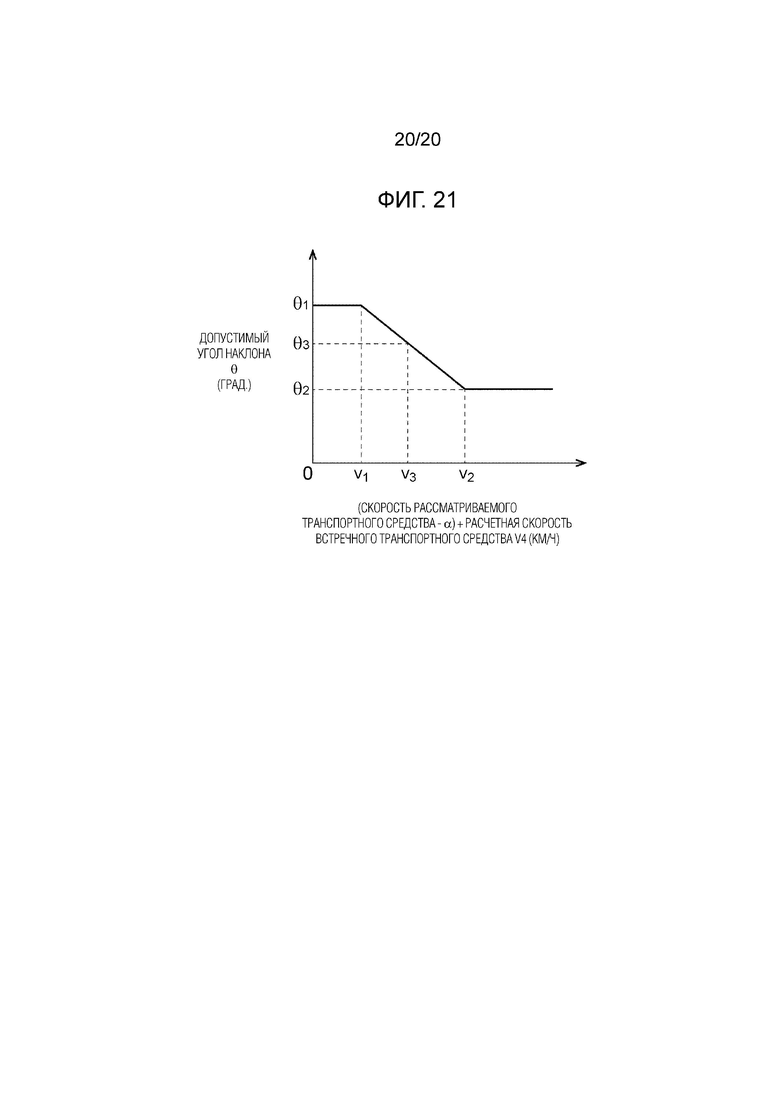
Изобретение относится к управляющему устройству для сиденья транспортного средства. Управляющее устройство для сиденья транспортного средства включает в себя актуатор и блок управления. Актуатор сконфигурирован регулировать по меньшей мере одно из угла наклона или позиции сиденья транспортного средства в продольном направлении сиденья. Блок управления сконфигурирован определять предусмотрен ли дорожный разделитель на дороге, по которой транспортное средство движется, и выполнять, когда определяется, что дорожный разделитель не предусмотрен, один из вариантов управления актуатором, а именно так, чтобы не наклонять спинку сиденья назад на угол более заданного угла, так, чтобы не позиционировать сиденье транспортного средства в позиции дальше назад по сравнению с заданной позицией, выводить предупреждающий сигнал, когда спинка сиденья наклоняется назад на угол более заданного угла, и выводить предупреждающий сигнал, когда сиденье транспортного средства позиционируется в позиции далее назад по сравнению с заданной позицией. Повышается безопасность при эксплуатации. 20 з.п. ф-лы, 23 ил.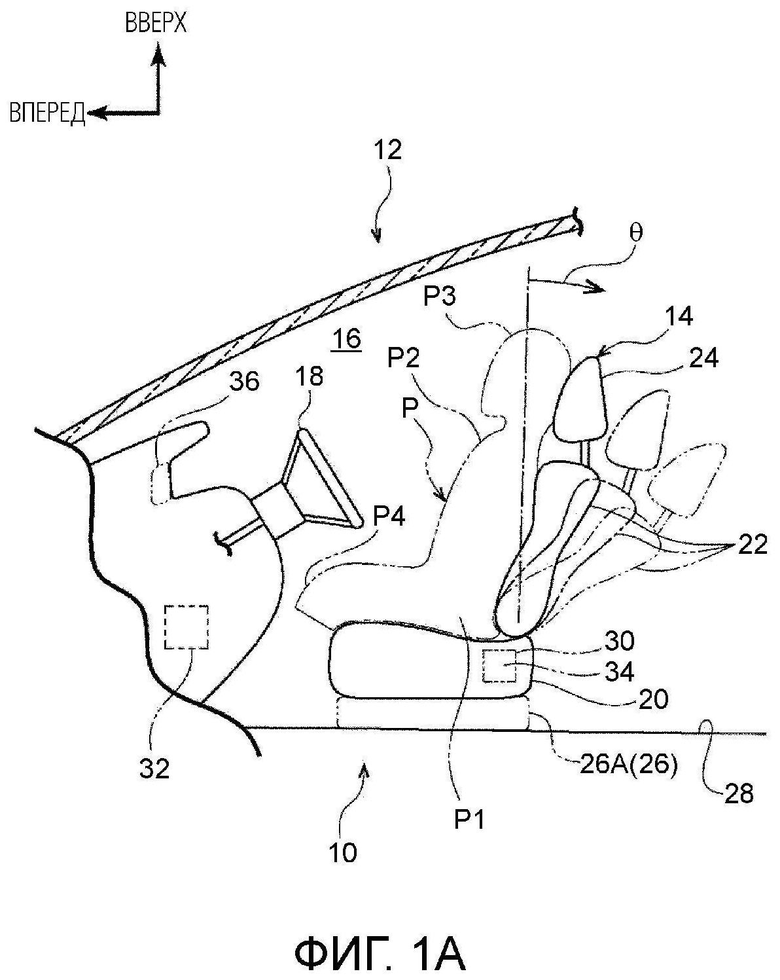
1. Управляющее устройство для сиденья транспортного средства, содержащее:
по меньшей мере один актуатор, предусмотренный в транспортном средстве, выполненном с возможностью движения посредством автоматического вождения, при этом актуатор выполнен с возможностью регулирования по меньшей мере одного из угла наклона или позиции сиденья транспортного средства в продольном направлении сиденья, причем угол наклона является углом спинки сиденья транспортного средства в заднем направлении сиденья относительно подушки сиденья транспортного средства;
при этом блок управления выполнен с возможностью:
определения того, предусмотрен или нет дорожный разделитель на дороге, по которой движется транспортное средство, и
выполнения, при определении того, что дорожный разделитель не предусмотрен, по меньшей мере что-либо одного из:
1) управления актуатором таким образом, чтобы не наклонять спинку сиденья назад на угол более заданного угла,
2) управления актуатором таким образом, чтобы не позиционировать сиденье транспортного средства в позиции дальше назад по сравнению с заданной позицией,
3) вывода предупреждающего сигнала, когда спинка сиденья наклоняется назад на угол более заданного угла, и
4) вывода предупреждающего сигнала, когда сиденье транспортного средства позиционируется в позиции далее назад по сравнению с заданной позицией.
2. Управляющее устройство по п. 1, в котором блок управления выполнен с возможностью, когда блок управления определяет то, что дорожный разделитель предусмотрен, установки по меньшей мере одного из заданного угла и заданной позиции на основе по меньшей мере одного из скорости движения транспортного средства и расчетной скорости транспортного средства.
3. Управляющее устройство по п. 1, в котором блок управления выполнен с возможностью, когда блок управления определяет то, что дорожный разделитель не предусмотрен, установки по меньшей мере одного из заданного угла и заданной позиции на основе, по меньшей мере, расчетной скорости встречного транспортного средства, которое движется по встречной полосе дороги, по которой движется транспортное средство.
4. Управляющее устройство по п. 3, в котором блок управления выполнен с возможностью, когда блок управления определяет то, что дорожный разделитель не предусмотрен, задания по меньшей мере одного из заданного угла и заданной позиции на основе суммарной скорости движения транспортного средства и расчетной скорости встречного транспортного средства или суммарной скорости для расчетной скорости транспортного средства и расчетной скорости встречного транспортного средства.
5. Управляющее устройство по п. 3 или 4, в котором блок управления выполнен с возможностью:
получения информации о дороге, по которой движется транспортное средство, посредством беспроводной связи; и
определения расчетной скорости встречного транспортного средства на основе информации о дороге, полученной посредством беспроводной связи.
6. Управляющее устройство по п. 3 или 4, в котором блок управления выполнен с возможностью:
получения информации от встречного транспортного средства посредством беспроводной связи и
определения расчетной скорости встречного транспортного средства на основе информации, полученной посредством беспроводной связи.
7. Управляющее устройство по п. 3 или 4, в котором блок управления выполнен с возможностью:
получения информации о скорости встречного транспортного средства посредством датчика, предусмотренного в транспортном средстве; и
определения расчетной скорости встречного транспортного средства на основе информации о скорости встречного транспортного средства, полученной от датчика.
8. Управляющее устройство по п. 3 или 4, в котором блок управления выполнен с возможностью:
получения информации о полосе движения, по которой движется по меньшей мере одно из транспортного средства и встречного транспортного средства, посредством датчика, предусмотренного в транспортном средстве; и
определения расчетной скорости встречного транспортного средства на основе информации о полосе движения, полученной от датчика.
9. Управляющее устройство по п. 2, в котором блок управления выполнен с возможностью определения скорости, полученной вычитанием величины замедления посредством автоматического торможения из скорости движения транспортного средства, в качестве расчетной скорости транспортного средства.
10. Управляющее устройство по любому из пп. 1-4 и 9, в котором:
сиденье транспортного средства включает в себя актуатор для наклона, который регулирует угол наклона спинки сиденья в заднем направлении сиденья; и
блок управления выполнен с возможностью:
когда блок управления определяет то, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство движется посредством автоматического вождения, управления актуатором для наклона таким образом, что угол наклона становится меньше угла наклона в случае, в котором блок управления определяет то, что дорожный разделитель предусмотрен, или,
когда блок управления определяет то, что дорожный разделитель не предусмотрен на дороге, по которой движется транспортное средство, вывода предупреждающего сигнала при угле наклона меньше угла наклона в случае, в котором блок управления определяет то, что дорожный разделитель предусмотрен.
11. Управляющее устройство по п. 10, в котором блок управления выполнен с возможностью задания заданного угла на основе позиции в продольном направлении сиденья для подушки сиденья.
12. Управляющее устройство по п. 10, в котором блок управления выполнен с возможностью задания заданного угла на основе позиции коленей пассажира, сидящего на подушке сиденья.
13. Управляющее устройство по п. 10, в котором блок управления выполнен с возможностью задания заданного угла на основе позиции головы пассажира, сидящего на подушке сиденья.
14. Управляющее устройство по любому из пп. 2-4 и 9, в котором:
сиденье транспортного средства включает в себя актуатор для наклона, который регулирует угол наклона спинки сиденья в заднем направлении сиденья; и
блок управления выполнен с возможностью:
когда блок управления определяет то, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство движется посредством автоматического вождения, управления актуатором для наклона таким образом, что угол наклона становится меньше угла наклона в случае, в котором блок управления определяет то, что дорожный разделитель предусмотрен, или,
когда блок управления определяет то, что дорожный разделитель не предусмотрен на дороге, по которой движется транспортное средство, вывода предупреждающего сигнала при угле наклона меньше угла наклона в случае, в котором блок управления определяет то, что дорожный разделитель предусмотрен;
причем блок управления выполнен с возможностью прекращения наклона спинки сиденья, останавливая работу актуатора для наклона, когда угол наклона достигает заданного угла.
15. Управляющее устройство по любому из пп. 2-4 и 9, в котором:
сиденье транспортного средства включает в себя актуатор для наклона, который регулирует угол наклона спинки сиденья в заднем направлении сиденья; и
блок управления выполнен с возможностью:
когда блок управления определяет то, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство движется посредством автоматического вождения, управления актуатором для наклона таким образом, что угол наклона становится меньше угла наклона в случае, в котором блок управления определяет то, что дорожный разделитель предусмотрен, или,
когда блок управления определяет то, что дорожный разделитель не предусмотрен на дороге, по которой движется транспортное средство, вывода предупреждающего сигнала при угле наклона меньше угла наклона в случае, в котором блок управления определяет то, что дорожный разделитель предусмотрен;
причем блок управления выполнен с возможностью инструктирования спинке сиденья наклоняться вперед, приводя в действие актуатор для наклона, таким образом, чтобы задавать угол наклона в угол, равный или меньше заданного угла.
16. Управляющее устройство по любому из пп. 1-4 и 9, в котором:
сиденье транспортного средства включает в себя актуатор для скольжения подушки, который регулирует позицию сиденья транспортного средства в продольном направлении сиденья; и
блок управления выполнен с возможностью:
когда блок управления определяет то, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство движется посредством автоматического вождения, управления актуатором для скольжения сиденья, таким образом, чтобы позиционировать сиденье транспортного средства дальше вперед по сравнению со случаем, в котором блок управления определяет то, что дорожный разделитель предусмотрен, или,
когда блок управления определяет то, что дорожный разделитель не предусмотрен на дороге, по которой движется транспортное средство, вывода предупреждающего сигнала в состоянии, в котором сиденье транспортного средства позиционируется дальше вперед по сравнению со случаем, в котором блок управления определяет то, что дорожный разделитель предусмотрен.
17. Управляющее устройство по любому из пп. 2-4 и 9, в котором:
сиденье транспортного средства включает в себя актуатор для скольжения сиденья, который регулирует позицию сиденья транспортного средства в продольном направлении сиденья; и
блок управления выполнен с возможностью:
когда блок управления определяет то, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство движется посредством автоматического вождения, управления актуатором для скольжения сиденья, таким образом, чтобы позиционировать сиденье транспортного средства дальше вперед по сравнению со случаем, в котором блок управления определяет, что дорожный разделитель предусмотрен, или,
когда блок управления определяет то, что дорожный разделитель не предусмотрен на дороге, по которой движется транспортное средство, вывода предупреждающего сигнала в состоянии, в котором сиденье транспортного средства позиционируется дальше вперед по сравнению со случаем, в котором блок управления определяет то, что дорожный разделитель предусмотрен;
причем сиденье транспортного средства выполнено с возможностью остановки перемещения в продольном направлении сиденья транспортного средства посредством блока управления, останавливающего работу актуатора для скольжения сиденья, когда позиция сиденья транспортного средства в продольном направлении сиденья достигает заданной позиции.
18. Управляющее устройство по любому из пп. 2-4 и 9, в котором:
сиденье транспортного средства включает в себя актуатор для скольжения сиденья, который регулирует позицию сиденья транспортного средства в продольном направлении сиденья; и
блок управления выполнен с возможностью:
когда блок управления определяет то, что дорожный разделитель не предусмотрен на дороге, по которой транспортное средство движется посредством автоматического вождения, управления актуатором для скольжения сиденья, таким образом, чтобы позиционировать сиденье транспортного средства дальше вперед по сравнению со случаем, в котором блок управления определяет то, что дорожный разделитель предусмотрен, или,
когда блок управления определяет то, что дорожный разделитель не предусмотрен на дороге, по которой движется транспортное средство, выводить предупреждающий сигнал в состоянии, в котором сиденье транспортного средства позиционируется дальше вперед по сравнению со случаем, в котором блок управления определяет то, что дорожный разделитель предусмотрен;
причем сиденье транспортного средства выполнено с возможностью перемещения вперед посредством блока управления, задействующего актуатор для скольжения сиденья, так что позиция сиденья транспортного средства позиционируется в заданной позиции или в позиции дальше вперед по сравнению с заданной позицией в продольном направлении сиденья.
19. Управляющее устройство по любому из пп. 1-4 и 9, в котором блок управления выполнен с возможностью замедления транспортного средства, по меньшей мере, либо когда спинка сиденья наклоняется назад на угол больше заданного угла, либо когда сиденье транспортного средства позиционируется дальше назад по сравнению с заданной позицией.
20. Управляющее устройство по любому из пп. 1-4 и 9, в котором блок управления выполнен с возможностью:
получения информации о дороге, по которой движется транспортное средство, посредством беспроводной связи; и
выполнения по меньшей мере однго из управления актуатором и вывода предупреждающего сигнала, предполагая, что дорожный разделитель не предусмотрен, когда блок управления определяет то, что дорога является дорогой для двухстороннего движения, на основе информации о дороге, полученной посредством беспроводной связи.
21. Управляющее устройство по любому из пп. 1-4 и 9, в котором:
транспортное средство выполнено с возможностью движения посредством ручного вождения или автоматического вождения;
спинка сиденья выполнена с возможностью наклона назад посредством блока управления, задействующего актуатор, когда вождение транспортного средства переключается с ручного вождения на автоматическое вождение; и
сиденье транспортного средства выполнено с возможностью:
перемещения назад посредством блока управления, задействующего актуатор, когда вождение транспортного средства переключается с ручного вождения на автоматическое вождение, или
перемещения назад со спинкой сиденья, наклоняемой назад посредством блока управления, задействующего актуатор, когда вождение транспортного средства переключается с ручного вождения на автоматическое вождение.
| US 9340127 B2, 17.05.2016 | |||
| Видоизменение устройства для просушки кинолент | 1929 |
|
SU19455A1 |
| УСТРОЙСТВО ДЛЯ УДЕРЖАНИЯ В РАЗБЛОКИРОВАННОМ ПОЛОЖЕНИИ ШАРНИРА РЕГУЛИРУЕМОГО КРЕСЛА ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2459720C2 |

