Притязание на приоритет и родственная патентная заявка
По данной заявке испрашивается приоритет и преимущества патентной заявки США №11/769580 «Servo Feedback Control Based on Invisible Scanning Servo Beam in Scanning Beam Display Systems with Light-Emitting Screens», поданной 27 июня 2007 года. Содержание патентной заявки США №11/769580 включено сюда в качестве ссылки как часть описания данной заявки PCT.
Область техники, к которой относится изобретение
Данная патентная заявка относится к системам отображения со сканирующими лучами.
Уровень техники
В системе отображения (система формирования изображения) со сканирующими лучами оптический луч может разворачиваться по экрану, формируя на нем изображения. Во многих системах формирования изображения, таких как лазерные системы отображения, используют полигональный сканер с множеством отражающих граней для обеспечения горизонтального сканирования и вертикальное сканирующее зеркало, такое как зеркало с гальванометрическим приводом, для обеспечения вертикального сканирования. В процессе функционирования одна грань полигонального сканера сканирует одну горизонтальную строку при вращении полигонального сканера для изменения ориентации и положения грани, а следующая грань сканирует следующую горизонтальную строку. Горизонтальное сканирование и вертикальное сканирование синхронизированы друг с другом для проецирования изображений на экран.
Сущность изобретения
В данной патентной заявке среди прочего описываются варианты реализации систем и устройств отображения на основе сканирования лучем света по светоизлучающему экрану при оптическом возбуждении. В описанных системах отображения используют светоизлучающие экраны с оптическим возбуждением и по меньшей мере один оптический луч возбуждения для возбуждения одного или нескольких светоизлучающих материалов на экране, которые излучают свет, формируя изображения. Для таких систем отображения описаны механизмы следящего управления (сервомеханизмы), которые основаны на использовании выделенного следящего луча, разворачивающегося по экрану тем же сканирующим модулем, который разворачивает или сканирует оптический луч возбуждения, несущий изображение. Этот выделенный следящий луч используют для обеспечения управления со следящей обратной связью сканирующим лучом возбуждения для обеспечения необходимого оптического согласования и точной подачи оптических импульсов в луче возбуждения во время нормального режима отображения. В некоторых вариантах реализации для одновременной развертки по экрану множества лазерных лучей возбуждения возможно использование множества лазеров. Например, множество лазерных лучей могут единовременно облучать один экранный сегмент и последовательно сканировать множество экранных сегментов для отработки всего экрана.
В одном варианте реализации система отображения со сканирующими лучами включает в себя световой модуль для направления и развертки по меньшей мере одного луча возбуждения, имеющего оптические импульсы, несущие визуальную информацию, и по меньшей один следящий луч, длина волны которого отлична от длины волны луча возбуждения; экран, позиционированный для приема сканирующего луча возбуждения и следящего луча, и содержащий светоизлучающий слой из параллельных светоизлучающих полос, которые поглощают свет луча возбуждения для излучения видимого света для создания изображений, которые несет сканирующий луч возбуждения, причем экран сконфигурирован для отражения света следящего луча в направлении светового модуля для создания светового сигнала следящей обратной связи; и модуль оптического следящего датчика, позиционированный для приема светового сигнала следящей обратной связи и создания сигнала следящей обратной связи, указывающего позиционирование следящего луча на экране. Световой модуль реагирует на позиционирование следящего луча на экране, используя сигнал следящей обратной связи для настройки синхронизации оптических импульсов, переносимых сканирующим лучом возбуждения, с целью управления пространственным согласованием пространственных положений оптических импульсов в луче возбуждения на экране.
Например, экран в вышеописанной системе может включать в себя метки следящей обратной связи, которые имеют грани, обращенные к световому источнику возбуждения, которые зеркально отражают свет следящего луча, а также области вне меток следящей обратной связи, которые диффузно отражают свет следящего луча. В данном примере система включает в себя линзу Френеля, расположенную между экраном и световым модулем, для направления сканирующего следящего луча и луча возбуждения таким образом, чтобы они были фактически перпендикулярны экрану. Линза Френеля имеет оптическую ось симметрично по центру линзы Френеля, которая параллельна оптической оси светового модуля и смещена относительно нее, чтобы направлять свет следящего луча, который зеркально отражается меткой следящей обратной связи, на оптический следящий датчик, когда свет следящего луча, который диффузно отражается экраном вне метки следящей обратной связи, распространяется линзой Френеля по площади, превышающей оптический следящий датчик, для направления части диффузно отраженного света следящего луча на оптический следящий датчик.
В другом варианте реализации способ управления системой отображения со сканирующими лучами включает в себя: развертку одного или более лучей возбуждения, модулированных оптическими импульсами для переноса изображений на экран, для возбуждения параллельных светоизлучающих полос, излучающих видимый свет, который формирует изображение; развертку по экрану следящего луча на оптической длине волны, отличной от оптической длины волны одного или более лучей возбуждения; обнаружение света следящего луча от экрана для получения следящего сигнала (сервосигнала), указывающего позиционирование следящего луча на экране; и, в соответствии с позиционированием следящего луча на экране, управление одним или более сканирующими лучами возбуждения для управления пространственным согласованием пространственных положений оптических импульсов в каждом луче возбуждения на экране.
В другом варианте реализации система отображения со сканирующими лучами включает в себя источник света возбуждения для формирования по меньшей мере одного луча возбуждения, имеющего оптические импульсы, несущие визуальную информацию; источник следящего света для создания по меньшей мере одного следящего луча на длине волны следящего луча, являющейся невидимой; модуль развертки луча для приема луча возбуждения и следящего луча и развертки луча возбуждения и следящего луча; и светоизлучающий экран, позиционированный для приема сканирующего луча возбуждения и следящего луча. Экран включает в себя светоизлучающую область, которая содержит: (1) параллельные светоизлучающие полосы, которые поглощают свет луча возбуждения для излучения видимого света, создавая изображения, которые несет сканирующий луч возбуждения; и (2) разделители полос, параллельные светоизлучающим полосам, которые пространственно перемежаются с ними, причем каждый разделитель полос расположен между двумя соседними полосами. Каждый разделитель полос является оптически отражающим. Оптический следящий датчик позиционирован для приема света следящего луча, разворачивающегося по экрану, включая свет, отраженный разделителями полос, и создания контрольного сигнала, указывающего позиционирование следящего луча на экране. Данная система включает в себя блок управления, способный, в соответствии с позиционированием следящего луча на экране, осуществить настройку синхронизации оптических импульсов, которые несет сканирующий луч возбуждения, в ответ на контрольный сигнал на основе взаимосвязи между следящим лучом и лучом возбуждения, для управления пространственным согласованием пространственных положений оптических импульсов в луче возбуждения на экране.
Согласно еще одному варианту реализации система отображения со сканирующими лучами включает в себя светоизлучающий экран, содержащий светоизлучающую область, которая содержит: (1) параллельные светоизлучающие полосы, которые поглощают свет возбуждения для излучения видимого света, и (2) оптически отражающие разделители полос, параллельные светоизлучающим полосам и пространственно перемежающиеся с ними, причем каждый разделитель полос расположен между двумя соседними полосами. Предусмотрены лазеры возбуждения для создания лазерных лучей возбуждения и по меньшей мере один источник следящего света, зафиксированный в положении относительно лазеров возбуждения для создания по меньшей мере одного следящего луча на длине волны следящего луча, являющейся невидимой. Система также включает в себя модуль развертки луча для приема лазерных лучей возбуждения и следящего луча и развертки лазерных лучей возбуждения и следящего луча; по меньшей мере один первый оптический следящий датчик (серводатчик), расположенный для приема света лазерного луча возбуждения, отраженного от экрана, для создания первого контрольного сигнала, указывающего позиционирование следящего луча на экране; по меньшей мере один второй оптический следящий датчик(серводатчик), расположенный для приема света лазерного луча возбуждения, отраженного от экрана, для создания второго контрольного сигнала, указывающего позиционирование каждого лазерного луча возбуждения на экране; блок управления, способный в соответствии с первым и вторым контрольными сигналами осуществить настройку синхронизации оптических импульсов, которые несет каждый лазерный луч возбуждения, на основе взаимосвязи между следящим лучом и каждым лазерным лучом возбуждения, для управления пространственным согласованием пространственных положений оптических импульсов в луче возбуждения на экране.
Согласно следующему варианту изобретения способ управления системой отображе6ния со сканирующими лучами включает в себя развертку по меньшей мере одного луча возбуждения, модулированного оптическими импульсами, на экране с параллельными светоизлучающими полосами, где направление развертки луча перпендикулярно светоизлучающим полосам, для возбуждения флуоресцентных полос для излучения ими видимого света, который формирует изображения. Экран содержит разделители полос, параллельные светоизлучающим полосам и пространственно перемежающиеся с ними, причем каждый разделитель полос находится между двумя соседними полосами и каждый разделитель полос является оптически отражающим. Данный способ также включает в себя развертку следящего луча, являющегося невидимым, вместе с лучом возбуждения на экране; обнаружение света сканирующего следящего луча от экрана, включая свет, созданный разделителями полос, для получения контрольного сигнала, указывающего позиционирование следящего луча на экране; и, в соответствии с позиционированием следящего луча на экране, настройку синхронизации оптических импульсов, которые несет сканирующий луч возбуждения, на основе взаимосвязи между следящим лучом и лучом возбуждения для управления пространственным согласованием пространственных положений оптических импульсов в луче возбуждения на экране.
Эти и другие примеры и варианты реализации детально описаны в подробном описании, на чертежах и в формуле изобретения.
Краткое описание чертежей
Фиг.1 - пример системы отображения с лазерным сканированием, имеющей светоизлучающий экран, выполненный из светоизлучающих материалов, возбуждаемых лазером (например, люминофоры), излучающие свет разных цветов при возбуждении сканирующим лазерным лучом, который несет информацию изображения, подлежащую отображению;
Фиг.2А-2В - одна из примерных экранных структур с параллельными светоизлучающими полосами и структура цветных пикселей на экране по Фиг.1;
Фиг.3 - примерная реализация лазерной системы отображения по Фиг.1, с множеством лазеров, направляющих множество лазерных лучей на экран, где конфигурация сканирования предусматривает выполнение развертки лучей до их прохождения через линзу.
Фиг.4 - примерная реализация системы отображения на основе лазерной системы отображения по Фиг.1, где конфигурация сканирования предусматривает выполнение развертки после прохождения лучей через линзу.
На Фиг.5 показан пример одновременного сканирования последовательных строк развертки множеством лазерных лучей возбуждения и невидимым следящим лучом;
Фиг.5А - карта положений луча на экране, созданная лазерной матрицей из тридцати шести лазеров возбуждения и одним инфракрасным следящим лазером, когда вертикальный гальванический сканер и горизонтальный полигональный сканер находятся в соответствующих нулевых положениях;
Фиг.6 - пример системы отображения со сканированием, где используется управление со следящей обратной связью на основе сканирующего следящего луча;
Фиг.7 - пример следящего детектора для обнаружения светового сигнала следящей обратной связи по Фиг.6;
Фиг.8 и 9 - два примера экрана для следящего управления на основе сканирующего следящего луча;
Фиг.10 - оптическая мощность следящего луча, имеющего оптические сигналы, соответствующие разделителям полос на экране;
Фиг.11 - пример экрана, имеющего периферийные зоны опорных меток, которые включают в себя следящие опорные метки, создающие световой сигнал обратной связи для реализации различных функций следящего управления;
Фиг.12 - опорная метка начала строки в периферийной зоне опорных меток для обеспечения точки отсчета начала активной флуоресцентной области на экране;
Фиг.13 и 14 - оптическая мощность следящего светового сигнала, имеющего оптические сигналы, соответствующие разделителям полос, опорной метки начала строки и опорной метки конца строки на экране;
Фиг.15, 16 и 17 - примеры использования тактовых сигналов дискретизации для измерения положения разделителей полос на экране с использованием светового сигнала следящей обратной связи от луча возбуждения или следящего луча;
Фиг.18А - пример опорной метки вертикального положения луча для экрана по Фиг.11;
Фиг.18В и 18С - схема управления со следящей обратной связью и ее функционирование при использовании опорной метки вертикального положения луча на Фиг.18А для управления вертикальным положением луча на экране;
Фиг.19 - пример экрана по Фиг.11 с опорной меткой начала строки и опорными метками вертикального положения луча;
Фиг.20 - процесс следящего управления на основе следящего луча, который разворачивается вместе с лучом возбуждения;
Фиг.21, 22 и 23 - примеры конструкций экранов, имеющих ИК-метки следящей обратной связи, которые не влияют на величину пропускания лучей возбуждения, обладая способностью диффузного или зеркального отражения по меньшей мере следящих лучей;
Фиг.24 - пример конструкции экрана, имеющей предусмотренные на экране зеркально отражающие инфракрасные метки для обратной связи и диффузно отражающие области вне инфракрасных меток для обратной связи;
Фиг.25 - пример системы на основе конструкции по Фиг.24;
Фиг.26 - пример системы, в которой объединены инфракрасная следящая обратная связь и следящая обратная связь в видимом свете;
Фиг.27, 28, 29 и 30 - иллюстрация аспектов системы по Фиг.26;
Фиг.31 - реализация системы по Фиг.26.
Подробное описание изобретения
В примерах систем отображения со сканирующими лучами, предложенных в этой заявке, используются экраны со светоизлучающими материалами или флуоресцентными материалами для излучения света при оптическом возбуждении для создания изображений, в том числе лазерные системы видеоотображения. Можно использовать различные примеры конструкций экрана со светоизлучающими или флуоресцентными материалами. Например, в одном варианте реализации на экране могут формироваться три люминофора разных цветов, которые можно оптически возбуждать лазерным лучом для создания света соответственно красного, зеленого и синего цветов, подходящих для формирования цветных изображений, в виде пиксельных точек или чередующихся красных, зленных и синих люминофорных параллельных полос.
Люминофорные материалы являются флуоресцентными материалами одного типа. Различные описанные системы, устройства и функции в примерах, где в качестве флуоресцентных материалов используют люминофоры, применимы для дисплеев с экранами, выполненными из других оптически возбуждаемых светоизлучающих флуоресцентных материалов, не относящихся к люминофорам. Например, материалы на основе квантовых точек при соответствующем оптическом возбуждении излучают свет, и поэтому их можно использовать в качестве флуоресцентных материалов для систем в устройств в данной заявке. В частности, в качестве материалов на основе квантовых точек для излучения света могут быть изготовлены полупроводниковые структуры, например, среди прочих, CdSe и PbS, в виде частиц с диаметром порядка радиуса возбуждения Бора. Для получения света разных цветов можно использовать различные материалы на основе квантовых точек с различными структурами запрещенных энергетических зон для излучения разных цветов при одинаковом световом потоке возбуждения. Некоторые квантовые точки имеют размеры от 2 до 10 нанометров и включают в себя десятки атомов, например, от 10 до 50 атомов. Квантовые точки могут быть диспергированы и перемешаны в различных материалах для формирования жидких растворов, порошков, желеобразных матричных материалов и твердых тел (например, твердые растворы). Пленки на основе квантовых точек или пленочные полосы можно сформировать на подложке в качестве экрана для системы или устройства в данной заявке. Например, в одном варианте реализации можно предусмотреть три разных материала на основе квантовых точек, которые можно приспособить для оптического возбуждения сканирующим лазерным лучом как оптическим насосом для создания красного, зеленого и синего света, подходящего для формирования цветных изображений. Указанные квантовые точки можно сформировать на экране в виде пиксельных точек, расположенных на параллельных строках (например, повторяющиеся последовательно строка красных пиксельных точек, строка зеленых пиксельных точек и строка синих пиксельных точек).
В описанных здесь примерах систем отображения со сканирующими лучами для возбуждения цветовых светоизлучающих материалов, напыленных на экран, для создания цветных изображений используют по меньшей мере один сканирующий лазерный луч. Сканирующий лазерный луч модулируют для переноса изображений в красном, зеленом и синем цветах или в других видимых цветах и обеспечивают управление таким образом, чтобы лазерный луч возбуждал светоизлучающие материалы красного, зеленого и синего с изображениями в красном, зеленом и синем цветах соответственно. Таким образом, сканирующий лазерный луч несет изображения, но сам непосредственно не создает видимый свет, воспринимаемей зрителем. Вместо этого светоизлучающие флуоресцентные материалы на экране поглощают энергию сканирующего лазерного луча и излучают видимый свет в красном, зеленом и синем или других цветах для создания реальных цветных изображений, видимых зрителю.
Лазерное возбуждение флуоресцентных материалов с использованием одного или нескольких лазерных лучей с энергией, достаточной для того, чтобы вызвать излучение света или люминесценцию флуоресцентных материалов, является одним из различных видов оптического возбуждения. В других вариантах реализации оптическое возбуждение можно создать не лазерным источником света, энергии которого достаточно для возбуждения флуоресцентных материалов, использованных в экране. Примеры не лазерных источников возбуждающего света включают в себя различные светоизлучающие диоды (LED), лампы и другие источники света, которые создают свет на длине волны или в спектральной полосе, для возбуждения флуоресцентного материала, который преобразует свет высокой энергии в свет низкой энергии в видимом диапазоне. Оптический луч возбуждения, который возбуждает флуоресцентный материал на экране, может иметь частоту или спектральную область с более высокими частотами, чем частота видимого света, излучаемого флуоресцентным материалом. Соответственно, оптический луч возбуждения может находиться в фиолетовом спектральном диапазоне и ультрафиолетовом (UV) спектральном диапазоне, например, с длиной волны менее 420 нм. В описанных ниже примерах фиолетовый или ультрафиолетовый лазерный луч используется как пример возбуждающего света для люминофорного материала или другого флуоресцентного материала, причем это может быть свет с другой длиной волны.
На Фиг.1 показан пример системы отображения на основе лазера, где используется экран с цветными люминофорными полосами. В альтернативном варианте для задания на экране пикселей изображения можно также использовать светоизлучающие области, разбитые на цветные пиксели. Система включает в себя лазерный модуль 110 для создания и проецирования на экран 101 по меньшей мере одного сканирующего лазерного луча 120. Экран 101 имеет параллельные цветные люминофорные полосы в вертикальном направлении, причем две соседние люминофорные полосы выполнены из разных люминофорных материалов, излучающих свет в разном цвете. В представленном примере красный люминофор поглощает лазерный свет для излучения красного света, зеленый люминофор поглощает лазерный свет для излучения зеленого света, а синий люминофор поглощает лазерный свет для излечения синего света. Три соседних цветных люминофорных полосы имеют три разных цвета. На Фиг.1 показана пространственная цветовая последовательность полос в виде «красный, зеленый и синий». Также можно использовать другие цветовые последовательности. Лазерный луч 120 имеет длину волны в полосе оптического поглощения цветных люминофоров, причем обычно это длина волны короче, чем длины волн видимого синего, зеленого и красного цветов для цветных изображений. Например, цветные люминофоры могут поглощать ультрафиолетовый свет в спектральном диапазоне ниже 410 нм для создания желаемого красного, зеленого и синего цвета. Лазерный модуль 110 может включать в себя один или несколько лазеров, таких как ультрафиолетовые диодные лазеры для создания луча 120, механизм сканирования лучом для развертки луча 120 по горизонтали и вертикали для единовременного воспроизведения одного кадра изображения на экране 101, и механизм модуляции сигнала для модуляции луча 120 для переноса информации для каналов изображения красного, зеленого и синего цветов. Указанные системы отображения можно сконфигурировать в виде систем с задним сканированием, где зритель и лазерный модуль 110 находятся с противоположных сторон экрана 101. В альтернативном варианте указанные системы отображения могут быть сконфигурированы в виде систем с передним сканированием, где зритель и лазерный модуль 110 находятся по одну сторону экрана 101.
Примеры вариантов реализации различных функций, модулей и компонент в системе отображения со сканирующим лазером по Фиг.1 описаны в патентной заявке США №10/578038 "Display Systems and Devices Having Screens With Optical Fluorescent Materials", поданной 2 мая 2006 года (патентная заявка США No.______), патентной заявке PCT № PCT/US2007/004004 "Servo-Assisted Scanning Beam Display Systems Using Fluorescent Screens", поданной 15 февраля, 2007 года (патентная публикация № WO 2007/095329), патентной заявке PCT № PCT/US2007/068286 "Phosphor Compositions For Scanning Beam Displays", поданной 4 мая 2007 года (PCT публикация № WO 2007/131195), патентной заявке PCT № PCT/US2007/68989 "Multilayered Fluorescent Screens for Scanning Beam Display Systems", поданной 15 мая 2007 года (PCT публикация № WO 2007/134329), и патентной заявке PCT № PCT/US2006/041584 "Optical Designs for Scanning Beam Display Systems Using Fluorescent Screens", поданной 25 октября 2006 года (PCT публикация № WO 2007/050662). Содержание патентных заявок, на которые здесь сделаны ссылки, целиком включено сюда в качестве ссылки как часть описания этой заявки.
На Фиг.2А показана примерная конструкция экрана 101 по Фиг.1. Экран 101 может включать в себя заднюю подложку 201, являющуюся прозрачной для сканирующего лазерного луча 120 и обращенную к лазерному модулю 110 для приема сканирующего лазерного луча 120. В конфигурации с задним сканированием вторая, передняя подложка 202 зафиксирована относительно задней подложки 201 и обращена к зрителю. Между подложками 201 и 202 расположен слой 203 цветных люминофорных полос, включающий в себя люминофорные полосы. Цветные люминофорные полосы для излучения красного, зеленого и синего цветов представлены символами «R», «G» и «B» соответственно. Передняя подложка 202 прозрачна для красного, зеленого и синего цветов, излучаемых люминофорными полосами. Подложки 201 и 202 могут быть выполнены из различных материалов, включая стеклянные или пластмассовые платы. Задняя подложка 201 может представлять собой тонкопленочный слой, сконфигурированный для возвращения энергии видимого света в направлении зрителя. Каждый цветной пиксель включает в себя участки из трех соседних цветных люминофорных полос в горизонтальном направлении, а его вертикальный размер определяется раствором лазерного луча 120 в вертикальном направлении. Фактически, каждый цветной пиксель включает в себя три субпикселя трех разных цветов (например, красный, зеленый и синий). Лазерный модуль 110 единовременно сканирует одну горизонтальную строку слева направо и сверху вниз по всему экрану 101. Для обеспечения правильного согласования лазерного луча 120 и каждой позиции пикселя на экране 101 можно предусмотреть контроль и управление относительным положением лазерного модуля 110 и экрана 101. В одном варианте реализации управление лазерным модулем 110 может быть организовано так, чтобы фиксировать его правильное положение относительно экрана 101, с тем чтобы алгоритм управления разверткой луча 120 обеспечивал необходимое согласование лазерного луча 120 и положения каждого пикселя на экране 101.
На Фиг.2А сканирующий лазерный луч 120 направляется на зеленую люминофорную полосу в пикселе для создания для него зеленого света. На Фиг.2В, кроме того, показано действие экрана 101, если смотреть в направлении В-В, перпендикулярном поверхности экрана 101. Поскольку каждая цветная полоса имеет вытянутую форму, поперечное сечение луча 120 может иметь удлиненную форму в направлении полосы, чтобы обеспечить максимальное значение коэффициента заполнения луча в каждой цветной полосе для каждого пикселя. Этого можно достичь, используя в лазерном модуле 110 оптический элемент, задающий форму луча. Лазерным источником, используемым для создания сканирующего лазерного луча, который возбуждает люминофорный материал на экране, может быть одномодовый лазер или многомодовый лазер. Лазер также может быть одномодовым в направлении, перпендикулярном продольному направлению люминофорных полос, чтобы обеспечить ограниченный раствор луча, меньший ширины каждой люминофорной полосы. В продольном направлении люминофорных полос этот лазерный луч может иметь множество мод для распространения по большей площади, чем луч, распространяющийся в поперечном направлении люминофорной полосы. Использование лазерного луча с одной модой в одном направлении для обеспечения небольшого следа луча на экране и множества мод в перпендикулярном направлении для обеспечения большего следа на экране позволяет подстраивать форму луча к удлиненному цветному субпикселю на экране и обеспечить достаточную мощность в лазерном луче посредством множества мод, что гарантирует достаточную яркость экрана.
Обратимся теперь к фиг 3, где показан примерный вариант реализации лазерного модуля 110 по Фиг.1. Для создания множества лазерных лучей 312 для одновременного сканирования экрана 101 с целью обеспечения повышенной яркости отображения используют лазерную матрицу 310 с множеством лазеров. Для управления и модулирования лазеров в лазерной матрице 310 предусмотрен контроллер 320 модуляции сигнала, который обеспечивает модуляцию лазерных лучей 312 для переноса изображения, подлежащего отображению на экране 101. Контроллер 320 модуляции сигнала может включать в себя процессор цифровых изображений, который создает сигналы цифровых изображений для трех разных цветовых каналов, и схемы лазерного возбудителя, которые создают сигналы управления лазерами, несущие сигналы цифровых изображений. Затем сигналы управления лазерами используют для модулирования лазеров, например, токи для лазерных диодов в лазерной матрице 310.
Развертку луча можно обеспечить путем использования сканирующего зеркала 340, такого как гальванометрическое зеркало, для вертикального сканирования и многогранного полигонального сканера 350 для горизонтального сканирования. Для проецирования сканирующих лучей от полигонального сканера 350 на экран 101 можно использовать линзу 360 развертки. Линза 360 развертки предназначена для передачи изображения от каждого лазера в лазерной матрице 310 на экран 101. Каждая из различных отражающих граней полигонального сканера 350 одновременно сканирует N горизонтальных строк, где N - количество лазеров. В приведенном примере лазерные лучи сначала направляют на гальванометрическое зеркало 340, а затем от гальванометрического зеркала 340 на полигональный сканер 350. Затем выходные сканирующие лучи 120 проецируют на экран 101. На оптической траектории лазерных лучей 312 расположен модуль 330 передающей оптики для модификации пространственных характеристик лазерных лучей 312 и создания плотно пакетированного пучка лучей 332 для развертки гальванометрическим зеркалом 340 и полигональным сканером 350 в качестве сканирующих лучей 120, проецируемых на экран 101, для возбуждения люминофоров и создания изображений путем излучения люминофорами света разных цветов. Между сканерами 340 и 350 установлен модуль 370 передающей оптики для передачи изображения на отражающей поверхности отражателя в вертикальном сканере 340 на соответствующую отражающую грань полигонального сканера 350, чтобы предотвратить уход луча через тонкую грань полигонального сканера 350 в вертикальном направлении.
Лазерные лучи 120 пространственно разворачиваются по экрану 101, попадая на различные цветные пиксели в разные моменты времени. Соответственно, каждый модулированный луч 120 в различные моменты времени несет сигнал изображения для красного, зеленого и синего цветов для каждого пикселя и для разных пикселей в различные моменты времени. Таким образом, контроллер 320 модуляции сигнала обеспечивает кодирование лучей 120 с помощью визуальной информации для различных пикселей в различные моменты времени. Таким образом, развертка луча отображает сигналы изображения, закодированные во временной области в лучах 120, на пространственные пиксели на экране 101. Например, каждый из модулированных лазерных лучей 120 может иметь временной интервал цветного пикселя, разделенный ровно на три последовательных временных сегмента для трех цветных субпикселей для трех разных цветовых каналов. Для создания требуемых шкал серого в каждом цвете, правильной комбинации цветов в каждом пикселе и желаемой яркости изображения при модуляции лучей 120 можно использовать способы импульсной модуляции.
В одном варианте реализации множество лучей 120 направляют на экран 101 по разным соседним вертикальным позициям, причем два соседних луча отделены друг от друга на экране 101 одной горизонтальной строкой экрана 101 в вертикальном направлении. Для данного положения гальванометрического зеркала 340 и данном положении полигонального сканера 350 лучи 120 могут расходиться друг относительно друга в вертикальном направлении на экране 101 и могут находиться в разных местах на экране 101 в горизонтальном направлении. Лучи 120 могут покрывать только один участок экрана 101.
В одном варианте реализации при положении гальванометрического зеркала 340 под углом вращение полигонального сканера 350 вызывает развертку лучей 120 от N лазеров в лазерной матрице 310 по одному сегменту, состоящему из N соседних горизонтальных строк на экране 101. Гальванометрическое зеркало 340 линейно отклоняется для изменения его угла наклона с заданной скоростью в вертикальном направлении сверху вниз во время сканирования полигональным сканером, пока не будет отсканирован весь экран 101 для создания полного экранного отображения. Когда будет пройден весь диапазон гальванометрического вертикального углового сканирования, гальванометрическая система возвращается обратно в верхнее положение, и цикл повторяется синхронно с частотой обновления отображения.
В другом варианте реализации для данного положения гальванометрического зеркала 340 и данного положения полигонального сканера 350 лучи 120 могут быть несогласованными друг относительно друга в вертикальном направлении на экране 101 и могут находиться в разных положениях на экране 101 в горизонтальном направлении. Лучи 120 могут покрывать только один участок экрана 101. В фиксированном угловом положении гальванометрического зеркала 340 вращение полигонального сканера 350 вызывает сканирование лучами 120 от N лазеров в лазерной матрице 310 одного экранного сегмента из N соседних горизонтальных строк на экране 101. В конце каждого горизонтального прохода по одному экранному сегменту гальванометрическое зеркало 340 устанавливают в другое фиксированное угловое положение, так что вертикальные положения всех N лучей 120 подстраиваются для сканирования следующего соседнего экранного сегмента из N горизонтальных строк. Этот процесс итеративно повторяется, пока не будет отсканирован весь экран 101 для создания полного экранного отображения.
В вышеуказанном примере системы отображения со сканирующими лучами, показанном на Фиг.3, линза 360 развертки расположена после устройств 340 и 350 развертки луча, фокусируя один или несколько сканирующих лучей 120 возбуждения на экран 101. В такой оптической конфигурации системы сканирования предусматривается выполнение развертки лучей до их прохождения через линзу. В указанно конструкции сканирующий луч, направленный на линзу 360 развертки, разворачивается в двух ортогональных направлениях. Таким образом, линза 360 развертки предназначена для фокусировки сканирующего луча на экран 101 по двум ортогональным направлениям. Для достижения правильной фокусировки в обоих ортогональных направлениях линза 360 развертки может быть составной, причем часто ее выполняют в виде множества элементов. В одном варианте реализации линза 360 развертки может, например, представлять собой двумерную линзу f-theta, которая предназначена для обеспечения линейной зависимости между положением фокальной точки на экране и входным углом развертки (theta) при развертке входного луча относительно каждой из двух ортогональных осей, перпендикулярных оптической оси линзы развертки. Двумерная линза 360 развертки, такая как линза (f-theta), в описанной конфигурации (где развертка лучей выполняется до их прохождения через линзу) может привести к оптическим искажениям по двум ортогональным направлениям сканирования, что вызывает искривление луча на экране 101. Конструкция линзы 360 развертки может содержать множество элементов для уменьшения искривлений и может оказаться весьма затратной при изготовлении.
Чтобы избежать вышеупомянутых проблем с искажениями, связанных с двумерной линзой развертки в системе, где развертка лучей выполняется до их прохождения через линзу, можно реализовать систему отображения, в которой развертка лучей выполняется после их прохождения через линзу, где двумерная линза 360 развертки заменена на более простую и дешевую одномерную линзу развертки. В Патентной заявке США №11/742014 «POST-OBJECTIVE SCANNING BEAM SYSTEMS», поданной 30 апреля 2007 года описаны примеры систем, где развертка лучей выполняется после их прохождения через линзу, подходящие для использования с люминофорными экранами, описанными в этой заявке, причем содержание патентной заявки США №11/742014 включено сюда в качестве ссылки как часть описания данной заявки.
На Фиг.4 показан примерный вариант реализации системы отображения на основе конструкции системы по Фиг.1, где развертка лучей выполняется после их прохождения через линзу. Для создания множества лазерных лучей 312 для одновременного сканирования экрана 101 с целью достижения повышенной яркости отображения используют лазерную матрицу 310 с множеством лазеров. Контроллер 320 модуляции сигнала предусмотрен для управления и модуляции лазеров в лазерной матрице 310, так чтобы модулировать лазерные лучи 312 для переноса изображения, подлежащего отображению на экране 101. Развертка луча базируется на конструкции с двумя сканерами: горизонтальный сканер, такой как полигональный сканер 350, и вертикальный сканер, такой как гальванометрический сканер 340. Каждая из различных отражающих граней полигонального сканера 350 одновременно сканирует N горизонтальных строк, где N - количество лазеров. Модуль 330 передающей оптики сокращает интервал между лазерными лучами 312 для формирования компактного набора лазерных лучей 332, которые распространяются в пределах размера грани полигонального сканера для горизонтального сканирования. Вслед за полигональным сканером 350 расположена одномерная (1-D) линза 380 горизонтальной развертки, за которой находится вертикальный сканер 340 (например, гальванометрическое зеркало), который получает каждый горизонтально развернутый луч 332 от полигонального сканера 350 через 1-D линзу 380 развертки и обеспечивает вертикальную развертку каждого горизонтально развернутого луча 332 в конце каждой горизонтальной развертки перед следующей горизонтальной разверткой, выполняемой следующей гранью полигонального сканера 350. Вертикальный сканер 340 направляет 2-D сканирующие лучи 390 на экран 101.
При использовании такой оптической конструкции для горизонтального и вертикального сканирования 1-D линза 380 развертки находится за полигональным сканером 140, но перед вертикальным сканером 340, фокусируя каждый горизонтально развернутый луч на экране 101, и минимизируя горизонтальное искривление изображений, отображаемых на экране 101, в приемлемом диапазоне, что обеспечивает создание строки горизонтальной развертки на экране 101, визуально воспринимаемой как прямая линия. Такая 1-D линза 380 развертки, способная создавать прямую строку горизонтальной развертки, относительно проще и дешевле, чем 2-D линза развертки с аналогичными рабочими характеристиками. После линзы 380 развертки расположен вертикальный сканер 340, представляющий из себя плоский отражатель, который просто отражает луч на экран 101 и обеспечивает вертикальную развертку, направляя каждый горизонтально отсканированный луч в разных вертикальных положениях на экране 101 для сканирования разных горизонтальных строк. Размер отражателя на вертикальном сканере 340 в горизонтальном направлении достаточно велик, чтобы покрыть пространственный размах каждого сканирующего луча, приходящего от полигонального сканера 350 и линзы 380 развертки. Система на Фиг.4 имеет конструкцию, где развертка лучей выполняется после их прохождения через линзу, поскольку 1-D линза 380 развертки находится перед вертикальным сканером 340. В этом конкретном примере линза или другой фокусирующий элемент после вертикального сканера 340 отсутствует.
Заметим, что в системе на Фиг.4, где развертка лучей выполняется после их прохождения через линзу, расстояние от линзы развертки до места на экране 101 для конкретного луча зависит от позиции вертикального сканирования вертикального сканера 340. Следовательно, в конструкции, где 1-D линза 380 развертки имеет фиксированное фокусное расстояние по прямой горизонтальной линии, проходящей через центр вытянутой 1-D линзы развертки, фокальные характеристики каждого луча должны изменяться в зависимости от позиции вертикального сканирования вертикального сканера 380 для поддержания соответствующей фокусировки луча на экране 101. В этой связи может быть реализован механизм динамической фокусировки для настройки сходимости луча, поступающего в 1-D линзу 380 развертки на основе позиции вертикального сканирования вертикального сканера 340.
Например, на оптической траектории одного или нескольких лазерных лучей от лазеров до полигонального сканера 350 в качестве механизма динамической фокусировки можно использовать стационарную линзу и линзу с динамической рефокусировкой. Каждый луч фокусируется линзой с динамической фокусировкой в точке перед стационарной линзой. Когда фокальные точки этих линз совпадают, свет на выходе линзы сводится в параллельный пучок. В зависимости от направления и величины отклонения между фокальными точками указанных линз свет на выходе коллиматорной линзы в направлении полигонального сканера 350 может быть либо расходящимся, либо сходящимся. Следовательно, регулировка относительных положений двух линз вдоль их оптической оси может обеспечить настройку фокуса сканирующего света на экране 101. Для регулировки относительного положения линз в зависимости от управляющего сигнала можно использовать привод линзы с рефокусировкой. В данном конкретном примере привод линзы с рефокусировкой используют для настройки сходимости луча, направленного на 1-D линзу 380 развертки вдоль оптической траектории от полигонального сканера 350 синхронно с вертикальным сканированием, выполняемым вертикальным сканером 340. Вертикальный сканер 340 на Фиг.4 выполняет сканирование с горазда меньшей частотой, чем первый, горизонтальный сканер 350, и поэтому изменение фокусировки, вызванное вертикальным сканированием по экрану 101, происходит во времени с меньшей частотой (с частотой вертикального сканирования). Это позволяет реализовать механизм корректировки фокуса в системе по Фиг.1, к которому предъявляется более низкое требование к быстродействию и который будет работать с относительно низкой частотой вертикального сканирования, а не с относительно высокой частотой горизонтального сканирования.
Лучи 120 на экране 101 находятся в разных, но соседних вертикальных позициях, причем два соседних луча отделены друг от друга на экране 101 одной горизонтальной строкой экрана 101 в вертикальном направлении. Для данного положения гальванометрического зеркала 540 и данного положения полигонального сканера 550 лучи 120 могут быть не выровнены друг относительно друга в вертикальном направлении на экране 101 и могут находиться на разных позициях на экране 101 в горизонтальном направлении. Лучи 120 могут покрывать один участок экрана 101.
На Фиг.5 показано, как происходит вышеописанное одновременное сканирование одного экранного сегмента множеством сканирующих лазерных лучей 120. Визуально лучи 120 ведут себя как кисть для «закрашивания» одного широкого горизонтального прохода по экрану 101 за один раз для покрытия одного экранного сегмента с начального края до конечного края области изображения на экране 101, а затем «закрашивания» другого широкого горизонтального прохода для покрытия соседнего смещенного по вертикали экранного сегмента. Если предположить, что лазерная матрица 310 содержит N = 36 лазеров, то для полного последовательного сканирования экрана 101 с 1080 строками потребуется отсканировать 30 вертикальных экранных сегментов. Таким образом, при указанной конфигурации в действительности экран 101 делится в вертикальном направлении на множество экранных сегментов, так что N сканирующих лучей одновременно сканируют один экранный сегмент, где каждый сканирующий луч сканирует только одну строку в экранном сегменте, а другие лучи сканируют другие последовательные строки в этом экранном сегменте. После того, как будет отсканирован один экранный сегмент, N сканирующих лучей одновременно перемещаются для сканирования следующего, соседнего экранного сегмента.
В вышеописанной конструкции с множеством лазерных лучей каждый сканирующий лазерный луч 120 сканирует только несколько строк на всем экране в вертикальном направлении, количество которых равно количеству экранных сегментов. Таким образом, полигональный сканер 550 для горизонтального сканирования может работать с меньшими скоростями, чем скорости сканирования, необходимые для однолучевой конфигурации, где один луч сканирует каждую сроку по всему экрану. Для данного общего количества горизонтальных строк на экране (например, 1080 строк в системе HDTV (телевидение высокой четкости)) количество экранных сегментов уменьшается с увеличением количества лазеров. Так, при использовании 36 лазеров гальванометрическое зеркало и, таким образом, полигональный сканер сканируют 30 строк на кадр, в то время как всего сканируется 108 строк на кадр при наличии только 10 лазеров. Следовательно, использование множества лазеров может повысить яркость изображения, которая примерно пропорциональна количеству используемых лазеров, и в то же время можно также успешно уменьшить скорость работы сканирующей системы.
Описанную здесь систему отображения со сканированием можно откалибровать в процессе изготовления, так чтобы были известны моменты времени включения-выключения лазерного луча и положение лазерного луча относительно флуоресцентных полос на экране 101, и чтобы обеспечить управление в пределах допуска, гарантирующее правильную работу системы с заданным качеством изображения. Однако экран 101 и компоненты лазерного модуля 101, входящие в систему, могут со временем изменяться благодаря различным факторам, таким как дрожание сканирующего устройства, изменения температуры или влажности, изменения в ориентации системы относительно гравитационного поля, вибрации, старение и прочее. Указанные изменения могут влиять на позиционирование лазерного источника относительно экрана 101 во времени, и поэтому согласование, выполненное предприятием-изготовителем, может измениться из-за перечисленных факторов. Заметим, что указанные изменения могут породить видимые и часто нежелательные эффекты в отображаемых изображениях. Например, лазерный импульс в сканирующем луче 120 возбуждения из-за рассогласования сканирующего луча 120 относительно экрана в горизонтальном направлении сканирования может попасть не на намеченный для этого лазерного импульса субпиксель, а на соседний. Когда это случается, окраска отображаемого изображения отклоняется от намеченной. То есть красный пиксель в намеченном изображении может отображаться на экране как зеленый пиксель. В другом случае лазерный импульс в сканирующем луче 120 возбуждения может попасть как на намеченный, так и на соседний субпиксель, следующий за намеченным, из-за рассогласования сканирующего луча 120 относительно экрана в горизонтальном направлении сканирования. Когда это случается, окраска отображаемого изображения отклоняется от намеченной окраски, и разрешение изображения ухудшается. Видимые эффекты от этих изменений могут усугубляться при увеличении разрешения отображения, поскольку чем меньше пиксель, тем меньше допуск на изменение его положения. Вдобавок, при увеличении размера экрана эффект изменения, который возможно повлияет на согласование, может проявиться сильнее, поскольку большое плечо силы при развертке каждого луча 120 возбуждения, связанного с большим экраном, означает, что угловая ошибка может привести к большой ошибке положения на экране. Например, если положение лазерного луча на экране при известном угле отклонения луча со временем изменяется, результатом будет изменение цвета в изображении. Этот эффект может быть значительным, что нежелательно для зрителя.
В этом описании предложены варианты реализации различных механизмов согласования для поддержания правильного согласования сканирующего луча на требуемом субпикселе для достижения желаемого качества изображения. Эти механизмы согласования включают в себя опорные метки на экране как во флуоресцентной области, так и в одной или нескольких периферийных областях вне флуоресцентной области, где опорные метки излучают видимый свет красного, зеленого и синего цвета с помощью люминофорных полос для обеспечения светового сигнала обратной связи, который порождается лучом 120 возбуждения и представляет положение и другие характеристики сканирующего луча на экране. Световой сигнал обратной связи можно измерить путем использования одного или нескольких оптических следящих датчиков для создания одного или нескольких следящих сигналов обратной связи, причем указанные следящие сигналы обратной связи используют для создания карты расположения красных, зеленых и синих субпикселей на экране. Блок следящего управления в лазерном модуле 110 обрабатывает указанный следящий сигнал обратной связи для извлечения информации о позиционировании луча и других характеристик луча на экране, и в ответ настраивает направление и другие характеристики сканирующего луча 120 для обеспечения правильного функционирования системы отображения.
Например, может быть обеспечена система управления со следящей обратной связью для использования периферийных следящих опорных меток, расположенных вне области отображения и невидимых зрителю, для обеспечения управления различными характеристиками луча, такими как горизонтальное позиционирование в горизонтальном направлении сканирования, перпендикулярном флуоресцентным полосам; вертикальное позиционирование в продольном направлении флуоресцентных полос; фокусировка луча на экране для управления цветом изображения (например, цветовое насыщение) и резкостью изображения, и мощность луча на экране для управления яркостью изображения и обеспечения равномерной яркости изображения по всему экрану. В другом примере процедура калибровки экрана может выполняться при запуске системы отображения с целью получения информации о позиционировании луча в виде калибровочной карты, содержащей точные положения субпикселей на экране во временной области. Далее эту калибровочную карту использует лазерный модуль 110 для управления синхронизацией и позиционированием сканирующего луча 120 для достижения желаемой чистоты цвета. В еще одним примере может быть предусмотрена система динамического следящего управления для регулярного обновления калибровочной карты во время нормального функционирования системы отображения путем использования следящих опорных меток во флуоресцентной области экрана для обеспечения светового сигнала обратной связи, незаметного для зрителя. Примеры использования следящего светового сигнала, создаваемого разделителями люминофорных полос на основе светового сигнала возбуждения и светового сигнала обратной связи от других опорных меток, для следящего управления и калибровки экрана описаны в патентной заявке №PCT/US2007/004004 «Servo-Assisted Scanning Beam Display Systems Using Fluorescent Screens» (публикация PCT № WO 2007/095329), содержание которой включено сюда по ссылке.
Системы отображения в этой заявке обеспечивают механизмы следящего управления на основе выделенного следящего луча, который разворачивается по экрану тем же сканирующим модулем, который разворачивает оптический луч возбуждения, несущий изображения. Этот выделенный следящий луч используют для осуществления управления сканирующим лучом возбуждения со следящей обратной связью для обеспечения необходимого оптического согласования и точной доставки оптических импульсов в луче возбуждения во время нормального функционирования дисплея. Этот выделенный следящий луч имеет оптическую длину волны, отличную от луча возбуждения. Например, этот выделенный следящий луч может быть инфракрасным следящим лучом, который может быть невидимым человеком. В примерах, описанных ниже, для иллюстрации функций и операций, выполняемых этим выделенным следящим лучом, используется инфракрасный следящий луч 130.
Обратимся к Фиг.1, где лазерный модуль 110 создает (в качестве примера выделенного следящего луча) невидимый следящий луч 130, такой как инфракрасный луч. Лазерный модуль 110 разворачивает следящий луч 130 по экрану 101 наряду с лучом 120 возбуждения. В отличие от луча 120 возбуждения следящий луч 130 не модулируют для переноса данных изображения. Следящим лучом 130 может быть непрерывный (CW) луч. Разделители полос на экране 101 могут быть выполнены в виде элементов, отражающих свет следящего луча 130 и создающих световой сигнал 132 обратной связи в результате отражения. Следящий луч 130 имеет известную пространственную взаимосвязь с лучом 120 возбуждения. Следовательно, позиционирование следящего луча 130 можно использовать для определения положения луча 120 возбуждения. Эту взаимосвязь между следящим лучом 130 и лучом 120 возбуждения можно определить путем использования опорных следящих меток, таких как метка начала строки (SOL) в неиспользуемой для просмотра области экрана 101. Лазерный модуль 110 принимает и обнаруживает световой сигнал 132 обратной связи, получая информацию о позиционировании следящего луча 130 на экране 101 и использует эту информацию о положении для управления согласованием луча 120 возбуждения на экране.
Следящий луч 130 невидим человеческому глазу и поэтому не создает каких-либо значительных визуальных артефактов на экране 101 во время нормального функционирования системы, когда на экране 101 создаются изображения. Например, следящий луч 130 может иметь длину волны в диапазоне от 780 нм до 820 нм. Из соображений безопасности экран 101 может быть выполнен с фильтром, который предотвращает прохождение невидимого следящего луча 130 от экрана 101 со стороны зрителя. В этой связи для блокирования следящего луча 130 и луча 120 возбуждения можно использовать ограничивающий абсорбционный фильтр с диапазоном пропускания только в рамках видимого спектрального диапазона (например, от 420 нм до 680 нм). Следящее управление лучом 120 возбуждения на основе следящего луча 130 может выполняться динамически во время нормального функционирования системы. Такая схема следящего управления позволяет избежать манипуляций с лучом 120 возбуждения, создающим изображение, для операций слежения во время нормального режима отображения, что исключает появление каких-либо визуальных артефактов, которые могут быть вызваны относящимися к слежению манипуляциями с лучом 120 возбуждения, создающим изображение.
Вдобавок, рассеянный или отраженный световой сигнал возбуждения от экрана 101 можно также использовать для операций следящего управления в течение периода, когда система не показывает изображения, например, во время периода запуска системы, или когда луч 120 возбуждения находится вне активной области отображения экрана 101. В указанном случае рассеянный или отраженный свет, помеченный на фиг.1 как свет 122, можно использовать в качестве светового сигнала следящей обратной связи для следящего управления, например, горизонтальным согласованием или вертикальным согласованием каждого лазерного луча 120.
В примерах систем на Фиг.3 и 4 следящий луч 130 направляется вместе с одним или несколькими лучами 120 возбуждения по одной и той же оптической траектории, которая включает в себя модуль 330А или 330В передающей оптики, сканеры 340 и 350 лучей и линзу 360 или 380 развертки. Обратимся к Фиг.5, где следящий луч 130 одновременно разворачивается вместе со сканирующими лучами 120 возбуждения по одному экранному сегменту в вертикальном направлении экрана. Следящий луч 130 невидим, и он может перекрывать траекторию сканирования одного луча 120 возбуждения или распространяться вдоль собственной траектории сканирования, которая отличается от траектории любого из лучей 120 возбуждения. Пространственная взаимосвязь между следящим лучом 130 и каждым лучом 120 возбуждения известна и зафиксирована, так что позиционирование следящего луча 130 на экране 101 можно использовать для позиционирования каждого луча 120 возбуждения.
Источником света для создания следящего луча 130 и источником света для создания луча 120 возбуждения могут быть полупроводниковые лазеры в модуле источника света, который может представлять собой матрицу лазеров, причем по меньшей мере один из лазеров в лазерной матрице может быть следящим лазером, создающим следящий луч 130. В одном варианте реализации известно местоположение следящего лазера относительно каждого лазера возбуждения в лазерной матрице лазерного модуля 110. Следящий луч 130 и каждый луч 120 возбуждения направляются через одну и ту же передающую оптику, одни и те же сканеры лучей и одну и ту же проекционную линзу и проецируются на экран 101. Таким образом, позиционирование следящего луча 130 на экране 101 известным образом взаимосвязано с позиционированием каждого луча 120 возбуждения на экране. Эту взаимосвязь между следящим лучом 130 и лучом 120 возбуждения можно использовать для управления лучом 120 возбуждения на основе измеренного положения следящего луча 130. Соотношение, характеризующее относительное положение следящего луча 130 и каждого луча 120 возбуждения, можно измерить, используя следящую обратную связь, например, во время процесса калибровки, который может быть выполнен отдельно или во время этапа включения питания системы. Эту установленную путем измерений взаимосвязь, характеризующую относительное положение указанных лучей, используют для осуществления управления со следящей обратной связью.
На Фиг.5А показана карта положений лучей на экране, созданных лазерной матрицей из тридцати шести лазеров возбуждения и одним инфракрасным следящим лазером, когда вертикальный гальванометрический сканер и горизонтальный полигональный сканер находятся в соответствующих им нулевым положениях в системе-прототипе, где развертка лучей выполняется до их прохождения через линзу. Тридцать шесть лазеров возбуждения скомпонованы в лазерной матрице 4х9, а в центре лазерной матрицы расположен инфракрасный следящий лазер. Лазерные лучи занимают на экране площадь порядка 20 мм х 25 мм. В этом примере интервалы между двумя соседними лазерами возбуждения по вертикали составляют половину пикселя, а интервалы между двумя соседними лазерами возбуждения по горизонтали составляют 3,54 пикселя. Поскольку лазеры возбуждения пространственно разнесены как в горизонтальном, так и в вертикальном направлениях, каждое сканирование в одном экранном сегменте создает тридцать шесть горизонтальных строк на экране, занимающих тридцать шесть пикселей в вертикальном направлении. При функционировании системы эти тридцать семь лазерных лучей разворачиваются вместе на основе схемы развертки, показанной на Фиг.5, для единовременного сканирования одного экранного сегмента, чтобы последовательно отсканировать разные экранные сегменты с разными вертикальными положениями для сканирования всего экрана. Поскольку положение инфракрасного следящего лазера фиксировано относительно каждого из тридцати шести лазеров возбуждения, позиционирование на экране 101 следящего луча 130, созданного инфракрасным следящим лазером, известным образом связано с каждым пятном луча 120 возбуждения для каждого из тридцати шести лазеров возбуждения.
На Фиг.6 показана система отображения со сканирующими лучами на основе следящего управления с использованием невидимого следящего луча 130. Для обеспечения функций и логических операций управления на основе сигналов от следящих детекторов 620 излучения, которые обнаруживают следящий световой сигнал 132 обратной связи от экрана 101, можно использовать процессор/контроллер 640 отображения. Возможно, что будет достаточно одного детектора 620, но для повышения чувствительности обнаружения сигналов следящей обратной связи можно использовать два или более следящих детекторов 620.
Аналогичным образом, один или несколько следящих детекторов 630 излучения можно также использовать для обнаружения следящего светового сигнала 122 возбуждения, созданного благодаря рассеянию или отражению луча 120 возбуждения на экране для подачи дополнительных сигналов обратной связи в процессор/контроллер 640 для следящего управления. Такое применение следящего светового сигнала 122 для управления с обратной связью может быть представлять собой опцию, которая используется в сочетании с управлением с инфракрасной следящей обратной связью. В некоторых вариантах реализации системы для согласования луча 120 возбуждения на нужные люминофорные полосы на экране 101 может оказаться достаточной только одна инфракрасная следящая обратная связь без обратной связи но основе светового сигнала 122 обратной связи, показанного на Фиг.6. Примеры использования следящего светового сигнала 122, созданного разделителями люминофорных полос для следящего управления, описаны в патентной заявке № PCT/US2007/004004 «Servo-Assisted Scanning Beam Display Systems Using Fluorescent Screens» (публикация PCT №WO 2007/095329), содержание которой включено сюда по ссылке.
На Фиг.6 для развертки и проецирования на экран 101 следящего луча 120 и луча 130 возбуждения предусмотрен модуль 610 проецирования развертки. Модуль 610 может иметь конфигурацию, где развертка лучей выполняется после их прохождения через линзу, или конфигурацию, где развертка лучей выполняется до их прохождения через линзу. Как показано на Фиг.6, данные изображения подаются в процессор/контроллер 640 отображения, который создает сигнал данных изображения, несущий данные изображения, для контроллера 520 модуляции сигнала для лазеров 510 возбуждения. Следящий лазер, находящийся среди лазеров возбуждения в матрице 510, не модулируется для переноса данных изображения. Контроллер 520 модуляции сигнала может включать в себя схемы возбудителя лазера, которые создают сигналы модуляции, несущие сигналы изображения с данными изображения, предназначенными для разных лазеров 510 соответственно. Далее сигналы управления лазерами используются для модуляции лазеров в лазерной матрице 510, например, токи для лазерных диодов для создания лазерных лучей 512. Процессор/контроллер 640 отображения также создает сигналы управления лазерами для лазеров в лазерной матрице 510 для регулировки ориентации лазеров с целью изменения вертикального положения луча на экране 101 или уровня мощности постоянного тока каждого лазера. Процессор/контроллер 640 отображения дополнительно подает сигналы управления сканированием в модуль 610 проецирования развертки для управления и синхронизации горизонтального полигонального сканера и вертикального сканера.
На Фиг.7 показан один пример конструкции следящего детектора, где следящий детектор 620 обнаруживает световой сигнал 132 следящей обратной связи. Следящим детектором 620 может быть детектор, чувствительный к световому сигналу с длиной волны невидимого следящего луча 130 и менее чувствительный к другому световому сигналу, такому как видимый свет и световой сигнал возбуждения. Для фильтрации света от экрана 101 с целью избирательной передачи светового сигнала 132 следящей обратной связи с одновременным блокированием светового сигнала на других длинах волн, таких как световой сигнал возбуждения и видимый свет, можно использовать оптический фильтр 710. Такой фильтр позволяет использовать в качестве следящего детектора оптические детекторы более широкого диапазона. На Фиг.7 также показан пример опционного следящего детектора 630 для обнаружения светового сигнала 122 следящей обратной связи на длине волны возбуждения. Следящим детектором 620 может быть детектор, спроектированный таким образом, что он будет чувствителен к световому сигналу с длиной волны луча 120 возбуждения и менее чувствителен к световому сигналу на длинах волн следящего луча 130 и видимого света, излучаемого экраном 101. Оптический фильтр 720 можно использовать для фильтрации света от экрана 101 для избирательной передачи светового сигнала 122 следящей обратной связи по возбуждению с одновременным блокированием света на других длинах волн. Сигналы 721 и 722 от следящих детекторов 620 и 630 соответственно направляются в процессор/контроллер 640 для выполнения операций следящего управления.
На Фиг.8 и 9 показаны две примерные конфигурации для экрана 101, обеспечивающие световой сигнал 122 и 132 обратной связи. На Фиг.8 каждый разделитель 810 полос выполнен в виде оптического отражателя следящего луча и луча возбуждения, так чтобы это отражение можно было использовать в качестве светового сигнала 132 обратной связи. Разделитель 810 полос также может быть выполнен как отражатель, непрозрачный для света, для оптического изолирования соседних светоизлучающих полос с целью увеличения контрастности и уменьшения перекрестных помех. Светоизлучающие полосы, такие как люминофорные полосы, излучающие красный, зеленый и синий свет, хуже отражают следящий луч и луч возбуждения, чем разделители 810 полос, так что световой сигнал 132 обратной связи принимает пиковое значение каждый раз, когда следящий луч или луч возбуждения 130 проходят через разделитель 810 полос. На каждый разделитель полос со стороны зрителя может быть нанесен слой 820, поглощающий черный цвет, для уменьшения отсвечивания рассеянного света для зрителя. На Фиг.9 показана другая конфигурация экрана, где отражающая следящая опорная метка 910 образована на стороне возбуждения каждого разделителя 901 полос, например, отражающее покрытие полосы.
При каждой горизонтальной развертке луч 120 или 130 разворачивается через светоизлучающие полосы, а отраженные световые сигналы, создаваемые разделителями полос, могут быть использованы для указания горизонтальных положений разделителей полос, интервалов между двумя соседними разделителями полос и горизонтальных положений горизонтально развернутого луча 120 или 130. Таким образом, отраженные световые сигналы от разделителей полос можно использовать для следящего управления горизонтальным согласованием луча 120 относительно светоизлучающих полос.
На Фиг.10 показано, как разделители полос действуют в качестве опорных меток согласования. При горизонтальной развертке следящего луча 120 или 130 по экрану 101 свет следящего луча имеет низкую мощность, когда следящий луч 130 попадает на светоизлучающую полосу, и имеет высокую мощность, когда следящий луч попадает на разделитель полос. Когда пятно следящего луча 130 на экране 101 меньше по ширине, чем один субпиксель, мощность следящего луча периодически изменяется при каждой горизонтальной развертке, причем пик мощности соответствует разделителю полос. Такой принцип можно использовать для измерения положения разделителей полос или ширины каждого разделителя полос на основе тактовых циклов тактового сигнала в процессоре/контроллере 640. Эту измерительную информацию используют для обновления карты положений каждого луча 120 возбуждения в горизонтальной развертке. Когда пятно следящего луча 130 больше ширины субпикселя, но меньше одного цветного пикселя, составленного из трех соседних субпикселей, мощность следящего светового сигнала 132 по-прежнему изменяется на периодической основе в каждой горизонтальной развертке, причем пик мощности соответствует одному цветному пикселю, и, следовательно, это можно использовать для следящего управления.
Вдобавок к разделителям полос, используемых в качестве опорных меток согласования на экране 101, можно реализовать дополнительные опорные метки согласования для определения относительного положения луча и экрана, а также других параметров луча возбуждения на экране. Например, во время горизонтальной развертки луча возбуждения и следящего луча через светоизлучающие полосы может быть предусмотрена метка начала строки для системы, чтобы определить начало активной светоизлучающей области отображения экрана 101, с тем чтобы системный контроллер модуляции сигнала мог правильно управлять синхронизацией при подаче оптических импульсов на намеченные пиксели. В системе также может быть предусмотрена метка конца строки для определения конца активной светоизлучающей области отображения экрана 101 во время горизонтальной развертки. В другом примере в системе может быть предусмотрена вертикальная опорная метка согласования для определения того, наведены ли сканирующие лучи в правильное положение по вертикали. Другими примерами опорных меток могут быть одна или несколько опорных меток для измерения размера пятна луча на экране и одна или несколько опорных меток на экране для измерения оптической мощности луча 120 возбуждения. Указанные опорные метки могут находиться в зоне вне активной флуоресцентной области экрана 101, например, в одной или нескольких периферийных зонах активной флуоресцентной области экрана и использоваться как для луча возбуждения, так и для следящего луча.
На Фиг.11 показан один пример флуоресцентного экрана 101, имеющего периферийные зоны с опорными метками. Экран 101 включает в себя центральную светоизлучающую область 1100 отображения с параллельными флуоресцентными полосами для отображения изображений и две периферийные зоны 1110 и 1120 с опорными метками, которые параллельны флуоресцентным полосам. Каждая периферийная зона с опорными метками может быть использована для обеспечения различных опорных меток для экрана 101. В некоторых вариантах реализации, когда горизонтальная развертка через флуоресцентные полосы осуществляется в области 1100 слева направо, предусмотрена только левая периферийная зона 1110 опорных меток без второй зоны 1120.
Такая периферийная зона меток на экране 101 позволяет системе отображения со сканированием контролировать некоторые рабочие параметры системы. Опорную метку в периферийной зоне опорных меток можно использовать для операции следящего управления на основе светового сигнала 132 следящей обратной связи, создаваемого из следящего луча 130. Когда световой сигнал 122 следящей обратной связи, созданный из луча 120 возбуждения, используется также для операции следящего управления, опорную метку в периферийной зоне опорных меток можно использовать для операции следящего управления на основе светового сигнала 122 следящей обратной связи. Опорную метку в периферийной зоне опорных меток можно использовать в некоторых варрантах реализации для измерения как луча 120 возбуждения, так и следящего луча 130 для операции следящего управления. Описание различных примеров опорных меток, приведенное ниже, в частности может относиться к лучу 120 возбуждения, и аналогичные функции могут быть использованы в связи со следящим лучом 130.
Заметим, что опорная метка в периферийной зоне опорных меток находится вне активной области 1100 отображения на экране 101, и поэтому соответствующая функция управления со следящей обратной связью может выполняться вне временных рамок операции отображения, когда луч возбуждения разворачивается по активной флуоресцентной области 2600 отображения для отображения изображения. Таким образом, динамическое следящее управление можно реализовать, не затрагивая процесс отображения изображений зрителю. В этой связи каждая развертка может включать в себя период непрерывного режима, когда луч возбуждения разворачивается по периферийной области опорных меток для динамического слежения и управления, и период режима отображения, когда включается модуляция луча возбуждения для создания оптических импульсов, несущих изображение, и луч возбуждения разворачивается по активной флуоресцентной области 1100 отображения. Следящий луч 130 не модулируется для переноса данных изображения, и поэтому при падении на экран 101 он может представлять собой непрерывный луч с постоянной мощностью. Мощность отраженного следящего света в световом сигнале 132 обратной связи модулируется опорными метками и разделителями полос и другими характерными особенностями на экране 101. Модулированную мощность отраженного следящего светового сигнала можно использовать для измерения положения следящего луча 130 на экране 101.
На Фиг.12 показан пример опорной метки 1210 начала строки (SOL) в левой периферийной зоне 1110 на экране 101. Опорная метка SOL 1210 может представлять собой отражающую, рассеивающею или флуоресцентную полосу, параллельную флуоресцентным полосам в активной светоизлучающей зоне 1100 экрана 101. Опорная метка SOL 1210 зафиксирована в положении, находящемся на известном расстоянии от первой флуоресцентной полосы в зоне 1100. В некоторых вариантах реализации конфигурации SOL могут представлять собой одну отражающую полосу, а в других вариантах реализации могут включать в себя множество вертикальных линий с равными или переменными интервалами между ними. Множество линий выбирается с избытком, что позволяет увеличить отношение сигнал-шум, точность измерения положения (времени) и обеспечивает обнаружение (не допускает пропуск) пропавших импульсов.
В процессе функционирования системы сканирующий луч 120 возбуждения разворачивается по экрану 101 слева направо, сначала проходя через периферийную зону 1110 опорных меток, а затем через активную зону 1100. Когда луч 120 находится в периферийной зоне 110 опорных меток, контроллер модуляции сигнала в лазерном модуле 110 системы переводит луч 120 в режим, который обеспечивает адекватную дискретизацию информации без перекрестных помех (например, один луч на интервал одного кадра). Когда сканирующий луч 120 возбуждения проходит через опорную метку SOL 1210, свет, отраженный, рассеянный или излученный опорной меткой SOL 1210 благодаря ее облучению лучом 1210 возбуждения, может быть измерен оптическим детектором SOL, расположенным рядом с опорной меткой SOL 1210. Наличие этого сигнала указывает местоположение луча 120. Оптический детектор SOL может быть зафиксирован в некотором месте в зоне 1110 на экране 101 или вне экрана 101. Таким образом, опорную метку SOL 1210 можно использовать для проведения периодической настройки согласования в течение срока службы системы.
При обнаружении импульса от метки SOL 1210 для данного луча возбуждения лазер, после задержки, представляющей время, необходимое для развертки луча от метки SOL 1210 с левого края активной области 1100 отображения, переводится в режим отображения изображения, в котором осуществляется перенос оптических импульсов с данными изображения. Затем система запрашивает ранее измеренное значение задержки от импульса SOL до начала области 1100 изображения. Этот процесс можно реализовать при каждой горизонтальной развертке для обеспечения того, чтобы каждая горизонтальная строка должным образом начиналась с области изображения, а оптические импульсы при каждой горизонтальной развертке были выровнены по светоизлучающим полосам. Перед формированием изображения для данной строки в области 1100 на экране 101 выполняется коррекция, с тем чтобы не было временной задержки при отображении изображений, вызываемой следящим управлением. Это позволяет обеспечить коррекцию как высокочастотных (вплоть до частоты сканирования строк), так и низкочастотных ошибок.
Следящий луч 130 можно использовать для обеспечения точки отсчета положения каждого луча 120 возбуждения для управления как синхронизацией начала импульсов, несущих изображение, перед тем как луч возбуждения войдет в активную светоизлучающую область 1100, та и во время нормального отображения, когда луч 120 возбуждения разворачивается в активной светоизлучающей области 1100. На Фиг.13 показана обнаруженная мощность светового сигнала на длине волны следящего луча в световом сигнале 132 обратной связи для демонстрации оптических сигналов, указывающих положения отметки SOL и разделителей полос на экране 101. Оптические пики в световом сигнале обратной связи, показанном на Фиг.13 и 14, идеализированы будучи представлены в виде узких прямоугольных сигналов, которые имеют задний и передний фронты, показанные на Фиг.15 и 16. Указанный импульсный сигнал с задним и передним фронтами может быть преобразован в импульсные сигналы, имеющие форму, близкую к квадратной, в результате отслеживания краев.
По аналогии с меткой SOL 1210 на противоположной стороне экрана 101 можно реализовать опорную метку конца строки (EOL), например, в периферийной зоне 1120 опорных меток на Фиг.11. Метку SOL используют для обеспечения правильного согласования лазерного луча относительно начала области изображения. Это не гарантирует правильное согласование во время всей горизонтальной развертки, поскольку могут иметь место ошибки позиционирования по экрану. Опорную метку EOL и оптический детектор конца строки в зоне 1120 можно использовать для линейной двухточечной коррекции положения лазерного луча в области изображения. На Фиг.14 показана обнаруженная мощность светового сигнала на длине волны следящего луча в световом сигнале 132 обратной связи для демонстрации оптических сигналов, указывающих положения на экране 101 метки SOL, разделителей полос и метки EOL.
При использовании как меток SOL, так и меток EOL, лазер постоянно включен в режиме непрерывной волны (CW) до достижения зоны датчика EOL. При обнаружении сигнала EOL лазер может вернуться в режим создания изображений, после чего выполняются вычисления, необходимые для коррекции синхронизации (или скорости развертки) на основе разницы во времени между импульсами SOL и EOL. Такая коррекция применяется для следующей одной или нескольких строк. Для уменьшения шума результаты измерений моментов времени от SOL до EOL для множества строк могут быть усреднены.
На основе разделителя полос и периферийных опорных меток SOL/EOL можно выполнить измерения положения следящего луча 130 на экране 101. Поскольку следящий луч 130 имеет фиксированную взаимосвязь с каждым лучом 120 возбуждения, которую можно установить путем измерений по опорной метке SOL или опорной метке EOL, любая ошибка при позиционировании следящего луча 130 повлечет соответствующую ошибку в каждом луче 120 возбуждения. Таким образом, информацию о позиционировании следящего луча 130 можно использовать при следящем управлении для управления следящим лучом 130 и каждым лучом 120 возбуждения для уменьшения ошибки согласования луча возбуждения.
Описанное здесь следящее управление обеспечивает размещение каждого оптического импульса в луче 120 возбуждения рядом или в центре намеченной светоизлучающей полосы для возбуждения светоизлучающего материала в этой полосе, не затрагивая соседнюю светоизлучающую полосу. Следящее управление может быть реализовано таким образом, чтобы указанное управление согласованием достигалось путем управления синхронизацией каждого оптического импульса, чтобы каждый импульс оказался в требуемом положении на экране 101 во время горизонтальной развертки. Соответственно, средства следящего управления, то есть процессор/контроллер 640 должны иметь информацию о горизонтальных положениях светоизлучающих полос в каждой горизонтальной строке перед каждой горизонтальной разверткой, чтобы управлять синхронизацией оптических импульсов во время развертки. Эта информация о горизонтальных положениях светоизлучающих полос в каждой горизонтальной строке образует двумерную «карту» положений активной области отображения или светоизлучающей области экрана 101 с координатами (x, y), где х - горизонтальное положение каждого разделителя полос (или, что то же самое, горизонтальное положение центра каждой полосы), а y - вертикальное положение или идентификационный номер горизонтальной развертки. Указанная карта положений для экрана 101 может быть получена путем измерений на предприятии-изготовителе, причем она может со временем изменяться благодаря изменениям в системных компонентах из-за температуры, старения и других факторов. Например, эффекты, связанные с тепловым расширением, и искажения в оптической системе создания изображений потребуют соответствующих настроек синхронизации для активизации каждого цвета пикселя. Если активизация лазера не соответствует синхронизации, то при направлении луча в центральную часть субпикселя или на полосы для намеченного люминофора луч 120 частично или полностью активизирует люминофор не того цвета, который требуется. Вдобавок, упомянутая карта положений для экрана 101 может изменяться от системы к системе из-за допусков на компоненты и устройства во время изготовления.
Таким образом, желательно обновлять карту положений для экрана 101 и использовать обновленную карту положений для управления синхронизацией импульсов луча 120 возбуждения при каждой горизонтальной развертке во время нормального отображения. Карту положений для экрана 101 можно получить, используя световой сигнал 122 и 132 обратной связи при калибровочном сканировании, когда система не находится в режиме нормального отображения, например во время фазы запуска системы. Вдобавок, световой сигнал 132 следящей обратной связи можно использовать при отображении видео в реальном времени для контроля и измерения изменений в существующей карте положений для экрана 101, когда система функционирует в режиме нормального отображения, создавая изображения на экране 101. Такой режим следящего управления называют динамическим следящим управлением. Динамический контроль экрана 101 может быть полезным, когда система работает в течение длительного периода времени без простоя, поскольку экран 101 может подвергнуться изменениям, которые возможно приведут к значительным изменениям в карте положений для экрана 101, которая обновляется во время фазы запуска системы.
Карту положений для экрана 101 можно запомнить в памяти лазерного модуля 110 и повторно использовать в течение некоторого интервала времени, если компенсируемые эффекты изменяются незначительно. В одном варианте реализации, когда включена система отображения, она может быть сконфигурирована таким образом, чтобы устанавливать по умолчанию синхронизацию лазерных импульсов сканирующего лазерного луча на основе данных в запомненной карте положений. Следящее управление может обеспечить контроль в режиме реального времени с использованием светового сигнала 132 следящей обратной связи и управлять синхронизацией импульсов во время работы.
В другом варианте реализации, когда система отображения включена, она может быть сконфигурирована таким образом, чтобы выполнять по умолчанию калибровку с использованием луча 120 возбуждения и следящего луча 130 для сканирования всего экрана 101. Полученные в результате измерений данные о положении используют для обновления карты положений для экрана 101. После начальной калибровки во время фазы запуска систему можно переключить в режим нормального отображения, после чего в режиме нормального отображения используется только следящий луч 130 для контроля экрана 101, а данные об экране 101, полученные от следящего луча 130, можно использовать для динамического обновления карты положений, а значит, для управления синхронизацией импульсов в луче 120 при каждой горизонтальной развертке.
Калибровку карты положения для экрана 101 можно выполнить, создавая каждый сканирующий луч 120 или 130 в режиме непрерывной волны (CW) для одного кадра, в течение которого сканирующие лазерные лучи 120 и 130 одновременно разворачиваются по всему экрану, по одному сегменту одновременно, как показано на Фиг.5, в случае использования множества лазерных лучей 120. При использовании одного лазера для создания одного луча 120 возбуждения единственный сканирующий луч 120 устанавливают в режим CW для сканирования всего экрана 101 по одной строчке разом вместе со следящим лучом 130. Световой сигнал 122 и 132 обратной связи от следящих опорных меток на разделителях полос используют для измерения положения лазерного луча на экране 101 путем использования следящих детекторов 620 и 630.
Сигналы от следящих детекторов 620 и 630 можно пересылать через электронный «пиковый» детектор, который создает электронный импульс всякий раз, когда относительная амплитуда следящего сигнала оказывается максимальной. Интервал времени между этими импульсами можно измерить с помощью тактового генератора синхронизации в цифровой схеме или микроконтроллере, который используется процессором/контроллером 640 для обработки и создания сигнала ошибки с целью управления синхронизацией оптических импульсов в каждом луче 120 возбуждения в горизонтальной развертке.
В одном варианте реализации временной интервал между двумя соседними импульсами от электронного пикового детектора можно использовать для определения интервалов между двумя местами, которые порождают два соседних электронный импульса, на основе скорости развертки сканирующего луча 120 или 130 по экрану 101. Эти интервалы можно использовать для определения ширины субпикселя и положения субпикселя.
В другом варианте реализации измерения и коррекция для следящего управления основаны на измерениях относительного времени. В зависимости от частоты развертки луча и частоты тактового генератора синхронизации имеется некоторое номинальное количество тактовых импульсов для каждого субпикселя. Из-за оптических искажений, дефектов экрана или сочетания искажений и дефектов количество тактовых циклов между двумя соседними импульсами для любого данного субпикселя может отклоняться от номинального количества тактовых циклов. Это отклонение количества тактовых циклов можно закодировать и запомнить в памяти для каждого субпикселя. В альтернативном варианте можно вычислить корректирующее значение и использовать его для некоторого числа N соседних субпикселей, поскольку между соседними субпикселями значительные изменения обычно не наблюдаются.
На Фиг.15 показан один пример обнаруженного отраженного светового сигнала обратной связи в функции времени развертки для участка одной горизонтальной развертки, соответствующий выходной сигнал пикового детектора и тактовый сигнал дискретизации. Здесь показаны номинальный субпиксель с шириной, соответствующей 9 тактовым циклам тактового генератора дискретизации, и соседний короткий субпиксель, соответствующий 8 тактовым циклам. В некоторых вариантах реализации ширина субпикселя может соответствовать 10-20 тактовым циклам. Тактовый цикл тактового сигнала дискретизации цифровой схемы или микроконтроллера для следящего управления задает пространственное разрешение сигнала ошибки. Например, если речь идет о способах повышения этого пространственного разрешения, то для эффективного увеличения пространственного разрешения сигнала ошибки можно использовать усреднение по множеству кадров.
На Фиг.16 показан один пример обнаруженного отраженного светового сигнала обратной связи в функции времени развертки для участка одной горизонтальной развертки, соответствующий выходной сигнал пикового детектора и тактовый сигнал дискретизации, где показаны номинальный субпиксель, соответствующий ширине в 9 тактовых циклов, и соседний длинный субпиксель, соответствующий ширине в 10 тактовых циклов.
Во время калибровки наличие загрязнений, например, пыль на экране, дефекты экрана или некоторые другие факторы, может привести к потере оптического импульса в отраженном световом сигнале обратной связи, который был создан следящей опорной меткой между двумя соседними субпикселями на экране 101. На Фиг.17 показан пример пропадания импульса. Пропавший импульс можно определить, если импульс не был отсчитан или обнаружен в номинальном количестве тактовых циклов для субпикселя в рамках максимального ожидаемого отклонения от номинального количества тактовых импульсов на один субпиксель. Если импульс потерян, то можно предположить, что пропавший субпиксель содержит номинальное значение тактовых циклов для одного субпикселя, и следующий субпиксель может содержать коррекцию синхронизации для обоих субпикселей. Коррекцию синхронизации можно усреднить по обоим субпикселям для повышения точности обнаружения. Этот способ можно распространить на любое количество последовательно пропавших импульсов.
Вышеописанное использование тактового сигнала дискретизации для измерений, необходимых для поддержки карты положений для экрана 101, можно использовать вместе с обнаружением светового сигнала 122 следящей обратной связи по возбуждению или световым сигналом 132 следящей обратной связи от экрана 101. Поскольку луч или лучи 120 возбуждения сканируют все горизонтальные строки на экране 101 во время калибровочной развертки в режиме CW, данные о положении, полученные из светового сигнала 122 следящей обратной связи по возбуждению, могут содержать данные для каждого из субпикселей экрана 101. Однако данные о положении, полученные из следящего луча 130 и соответствующего светового сигнала 132 обратной связи, покрывают только одну горизонтальную строку развертки одного экранного сегмента, как показано на Фиг.5. Данные о положении, полученные путем измерений следящего луча 130 для одного экранного сегмента, можно использовать в качестве представительной развертки для всех горизонтальных строк в этом экранном сегменте для обновления данных о положении для всех строк в этом экранном сегменте. Для увеличения количества строк, для которых выполняют измерения в каждом экранном сегменте, можно использовать два или более следящих лучей 130.
Вертикальное положение каждого лазера можно контролировать и настраивать, используя привод, вертикальный сканер и регулируемый объектив на оптической траектории каждого лазерного луча, или с помощью комбинации этих или других механизмов. На экране могут быть предусмотрены вертикальные опорные метки, позволяющие обеспечить следящую обратную связь по вертикали от экрана к лазерному модулю. Вблизи области изображения на экране 101 могут быть предусмотрены одна или несколько отражающих, флуоресцентных или просветных вертикальных опорных меток для измерения вертикального положения каждого луча 120 возбуждения. Обратимся к Фиг.11, где указанные вертикальные опорные метки могут быть размещены в периферийной зоне опорных меток. Для измерения отраженного, флуоресцентного или проходящего света от вертикальной опорной метки при ее облучении лучом 120 или 130 можно использовать один или несколько оптических детекторов вертикальных меток. Выходной сигнал каждого оптического детектора вертикальных меток обрабатывается, и информацию о вертикальном положении луча используют для управления приводом с целью настройки вертикального положения луча на экране 101.
На Фиг.18А показан пример вертикальной опорной метки 2810. Метка 2810 включает в себя пару одинаковых треугольных опорных меток 2811 и 2812, которые раздвинуты друг относительно друга как в вертикальном, так и горизонтальном направлениях для поддержания перекрытия в горизонтальном направлении. Ориентация каждой треугольной опорной метки 2811 или 2812 определяет изменение площади в вертикальном направлении, так что луч 120 частично перекрывает каждую метку при ее сканировании в горизонтальном направлении. При изменении вертикального положения луча 120 изменяется размер области перекрытия на метке. Относительное положение двух меток 2811 и 2812 определяет заданное вертикальное положение луча, и сканирующий луч, идущий вдоль горизонтальной строки через это заранее заданное вертикальное положение, разворачивается через одинаковые области, показанные в виде затененных областей в двух метках 2811 и 2812. Когда луч находится по вертикали выше этого заранее заданного положения, перед ним оказывается большая область в первой метке 2811, чем во второй метке 2812, и эта разница в размерах областей, открывающихся лучу, возрастает по мере перемещения луча дальше в вертикальном направлении. В противном случае, когда луч находится ниже указанного заранее заданного положения по вертикали, находящееся на его пути область во второй метке 2812 оказывается большей, чем область в первой метке 2811, и эта разница возрастает по мере перемещения луча дальше вниз в вертикальном направлении.
Световой сигнал обратной связи от каждой треугольной метки интегрируется по указанной метке, и интегрированные сигналы двух меток сравниваются для получения дифференциального сигнала. Знак дифференциального сигнала указывает направление смещения относительно заранее заданного вертикального положения луча, а величина дифференциального сигнала указывает величину смещения. Луч возбуждения находится в правильном вертикальном положении, когда интегрированные световые сигналы от каждого треугольника равны, то есть дифференциальный сигнал равен нулю.
На Фиг.18В показана часть схемы обработки сигнала, являющейся частью блока управления вертикальным положением луча со следящей обратной связью в лазерном модуле 110 для вертикальной опорной метки на Фиг.18А. Предусилитель 2910 на p-i-n диодах получает и усиливает дифференциальный сигнал двух сигналов, отраженных от двух меток 2811 и 2812, и направляет усиленный дифференциальный сигнал на интегратор 2920. Для преобразования дифференциального сигнала в цифровой сигнал предусмотрен аналого-цифровой преобразователь 2930. Цифровой процессор 2940 обрабатывает дифференциальный сигнал для определения величины и направления настройки вертикального положения луча и создает соответствующий сигнал управления вертикальным приводом. Этот сигнал управления преобразуется в аналоговый сигнал управления цифроаналоговым преобразователем 2950 и подается на контроллер 2960 вертикального привода, который настраивает этот привод. На Фиг.18С дополнительно показан процесс создания дифференциального сигнала с использованием одного оптического детектора.
На Фиг.19 показан пример экрана по Фиг.11, имеющего опорную метку начала строки (SOL) и опорные метки вертикального положения луча. Множество опорных меток вертикального положения луча могут быть размещены в разных вертикальных положениях для обеспечения измерения вертикального положения лучей 120 возбуждения во всех экранных сегментах. В примере на Фиг.19 показано, что опорная метка SOL находится между опорными метками вертикального положения луча и областью отображения экрана, так что при горизонтальной развертке слева направо луч 120 возбуждения или следящий луч 130 попадает на опорную метку SOL после опорных меток вертикального положения луча. В другом варианте реализации при горизонтальной развертке слева направо опорная сметка SOL находится между опорными метками вертикального положения луча и областью отображения экрана, обеспечивая попадание луча 120 возбуждения или следящего луча 130 на опорную метку SOL до опорных меток вертикального положения луча. Вдобавок, отдельно от опорных меток вертикального положения луча для лучей 120 возбуждения, в разных вертикальных положениях может быть размещено множество опорных меток вертикального положения луча, например одна вертикальная опорная метка для следящего луча 130 для обеспечения измерения вертикального положения следящего луча 130 в каждом экранном сегменте. Эти вертикальные опорные метки представлены на Фиг.19 под номером «1910». Сочетание опорной метки SOL 1210, вертикальных опорных меток 1910, а также периодический характер структуры полос в светоизлучающей области 1110 обеспечивает информацию о позиционировании невидимого следящего луча 130, информацию о позиционировании лучей 120 возбуждения, а также горизонтальные параметры пикселей на экране 101 для следящего управления в системе отображения со сканированием.
На Фиг.20 показан пример процесса следящего управления с использованием следящего луча 130 во время режима нормального отображения, когда каждый луч 120 возбуждения используется для переноса оптических импульсов с целью создания изображений на экране 101 и не используется для следящего управления. Следящий луч 130 представляет собой непрерывный (CW) луч, который разворачивается по одной горизонтальной строке для одного экранного сегмента вместе со сканирующими модулированными лазерными лучами 120 возбуждения. Световой сигнал 132 следящей обратной связи обнаруживается одним или несколькими следящими детекторами 620 для измерения ошибки согласования следящего луча 130 на экране 101 во время нормального отображения. Согласование каждого лазерного луча 120 возбуждения настраивается на основе измеренной ошибки согласования следящего луча 130 для уменьшения ошибки согласования лазерного луча 120 возбуждения. В других вариантах реализации для обеспечения механизма калибровки результатов измерений, полученных посредством следящего луча 130, можно использовать красный, зеленый и синий свет, излучаемые экраном 101, или часть отраженного светового сигнала возбуждения сканирующего луча 120 возбуждения.
В приведенных выше примерах использования невидимого инфракрасного следящего луча 130 для подачи светового сигнала 132 обратной связи в лазерный модуль 110 с целью создания отраженного светового сигнала 132 обратной связи путем отражения следящего луча 132 разделителями полос используют параллельные люминофорные полосы и разделители полос на экране 101. В альтернативном варианте конструкция экрана 101 может включать в себя метки инфракрасной обратной связи, сконфигурированные для создания требуемого светового сигнала 132 обратной связи. Метки инфракрасной обратной связи могут фиксироваться с учетом конкретной пространственной взаимосвязи с разделителями полос или люминофорными полосами, например, положение метки следящей обратной связи выравнивают по светоизлучающей полосе или разделителю между двумя соседними параллельными светоизлучающими полосами на экране. В примерах, описанных ниже, такая фиксация положения не требуется, и достаточно, чтобы метки инфракрасной обратной связи имели фиксированную и известную пространственную взаимосвязь с разделителями полос или люминофорными полосами, с тем чтобы обеспечить фиксированное и известное отображение положений меток инфракрасной обратной связи и положений люминофорных полос и разделителей полос.
На Фиг.21 показана примерная конструкция светоизлучающего экрана 101, которая включает в себя метки инфракрасной обратной связи со стороны возбуждения люминофорного слоя. Этот экран 101 содержит: слой 2110 люминофорных полос с параллельными люминофорными полосами, излучающими красный, зеленый и синий свет при их возбуждении лучом 120 возбуждения; заднюю панель 2112 на стороне возбуждения люминофорного слоя 2110, на который падают луч 120 возбуждения и инфракрасный следящий луч 130; а также переднюю панель 2111 со стороны люминофорного слоя 2110, обращенной к зрителю. В этом примере на задней поверхности задней панели сформированы метки инфракрасной обратной связи для создания инфракрасного светового сигнала 132 обратной связи путем отражения или рассеяния инфракрасного следящего луча 130. В других вариантах реализации метки 2120 инфракрасной обратной связи могут находиться в других положениях: либо на стороне возбуждения люминофорного слоя 2110, либо на стороне этого слоя, обращенной к зрителю.
Метки 2120 инфракрасной обратной связи предусмотрены для обеспечения регистрации положения следящего луча 130 на экране, причем они могут быть реализованы в различных конфигурациях. Например, метки 2120 инфракрасной обратной связи могут представлять собой периодически повторяющиеся полосы, параллельные параллельным люминофорным полосам в люминофорном слое 2110. Метка 2120 инфракрасной обратной связи может быть размещена в любом положении относительно разделителя полос или люминофорной полосы в люминофорном слое 2110 в горизонтальном направлении, включая положение, смещенное по горизонтали относительно разделителя полос или центра люминофорной полосы. Ширина каждой метки 2120 инфракрасной обратной связи может быть равна ширине пятна инфракрасного следящего луча 130 на экране 101, когда обнаружение светового сигнала 132 инфракрасной следящей обратной связи выполняется пиковым детектором. Можно использовать метки 2120 инфракрасной обратной связи с шириной, превышающей ширину пятна инфракрасного следящего луча 130 на экране 101, если обнаружение светового сигнала 132 инфракрасной следящей обратной связи основано на положении каждой метки 2120 инфракрасной обратной связи по отношению к точке отсчета положения, например метке SOL. Ширина меток 2120 инфракрасной обратной связи может быть меньше ширины каждой люминофорной полосы, например, составлять половину ширины люминофорной полосы. Интервал между двумя соседними метками 2120 инфракрасной обратной связи может превышать интервал между двумя соседними люминофорными полосами. Например, интервал между инфракрасными метками может составлять 25 мм, а интервал между люминофорными полосами может составлять 1,5 мм.
Метки 2120 инфракрасной обратной связи могут быть выполнены таким образом, чтобы они по своим оптическим свойствам отличались от окружающих областей и областей между метками 2120 инфракрасной обратной связи, что дает возможность оптического обнаружения меток 2120 инфракрасной обратной связи для регистрации положения меток 2120 инфракрасной обратной связи на экране при поддержке фактически одинакового оптического пропускания для луча 120 возбуждения как в областях, окружающих метки 2120 инфракрасной обратной связи, так и между ними. Таким образом, наличие меток 2120 инфракрасной обратной связи не влияет на прохождение луча 120 возбуждения благодаря оптическому отпечатыванию форм меток 2120 в луче 120 возбуждения, который достигает люминофорного слоя экрана 101. В этой связи метки 2120 инфракрасной обратной связи могут быть реализованы в различных конфигурациях. Например, каждая метка инфракрасной обратной связи может быть выполнена с гладкой поверхностью, обращенной к стороне возбуждения, которая зеркально отражает свет, а области, окружающие метки 2120 инфракрасной обратной связи и находящиеся между, сконфигурированы таким образом, что они вызывают диффузное отражение в различных направлениях. Зеркально отражающие метки 2120 инфракрасной обратной связи и диффузно отражающие области, окружающие метки 2120 и находящиеся между ними, имеют одинаковые характеристики светопропускания. В отличие от выше описанной конструкции с зеркально отражающими метками 2120 на диффузном основании, метки 2120 инфракрасной обратной связи также могут быть выполнены диффузно отражающими свет, а области, окружающие метки 2120 и находящиеся между ними, выполняют зеркально отражающими. В другом примере метки 2120 инфракрасной обратной связи могут иметь пропускную или отражательную способность на длине волны луча 120 возбуждения, значительно отличающуюся от длины волны следящего луча. Например, метки 2120 инфракрасной обратной связи могут быть сконфигурированы оптически прозрачными для луча 120 возбуждения и оптически отражающими для следящего луча 130, так что метки 2120 инфракрасной обратной связи оказываются оптически «невидимыми» для луча 120 возбуждения и отражающими следящий луч 130 для создания светового сигнала 132 инфракрасной следящей обратной связи.
На Фиг.22 и 23 показаны примеры конфигураций компоновки экрана с вертикальными опорными метками 1910 для измерения вертикальных положений инфракрасного следящего луча 130. На Фиг.22 вертикальные опорные метки 1910 расположены на краю экрана, предпочтительно вне основной области отображения экрана. На Фиг.23 вертикальные опорные метки 1910 расположены на краях и в середине экрана, причем они могут быть выполнены с одинаковыми характеристиками цветопередачи для луча 120 возбуждения.
На Фиг.24 показан конкретный пример конструкции экрана с зеркально отражающими метками инфракрасной обратной связи и диффузионными областями, окружающими метки инфракрасной обратной связи и находящимися между ними. В этом примере метка инфракрасной обратной связи выполнена в виде пленочной полосы, которая имеет гладкую поверхность для зеркального отражения 2430 падающего инфракрасного следящего светового сигнала 130. Область экрана между двумя метками инфракрасной обратной связи формируется в виде пленочного слоя с шероховатой поверхностью, которая рассеивает свет при отражении падающего инфракрасного следящего светового сигнала 130 для диффузного отражения 2440 в разных направлениях с формированием конуса диффузного отражения. Две зоны 2410 и 2420 имеют примерно одинаковое светопропускание для луча 120 возбуждения.
В вышеописанной конструкции экрана, обеспечивающей инфракрасную следящую обратную связь, можно использовать различные оптические режимы зеркального отражения и диффузного отражения инфракрасного следящего луча 130 от экрана в удаленном от экране оптическом поле для облегчения обнаружения следящего луча, как показано в примере на Фиг.25.
На Фиг.25 показана примерная система 2500 отображения со сканирующими лучами, которая обеспечивает инфракрасную следящую обратную связь на основе конструкции экрана по Фиг.24. Лазерный модуль 110 проецирует и разворачивает как инфракрасный следящий луч 130, так и луч 120 возбуждения по экрану 101 с метками инфракрасной обратной связи. Лазерный модуль 110 имеет оптическую ось 2501 симметрии, относительно которой выполняется развертка луча. Экран 101 имеет конструкцию, показанную на Фиг.21 или 22 на основе конструкции по Фиг.24. Здесь предусмотрена оптическая телецентрическая линза 2510, например слой линзы Френеля, для соединения падающих сканирующих лучей 120 и 130 от лазерного модуля 110 на экране 101. Телецентрическая линза 2510 сконфигурирована таким образом, что ее оптическая ось 2502 симметрии параллельна оптической оси 2501 лазерного модуля 110 со смещением 2503. Как здесь показано, линза 2510 Френеля расположена перед задней поверхностью экрана 101 с воздушным зазором 2520.
Обнаружение инфракрасного следящего сигнала обеспечивается инфракрасным следящим детектором 2530, расположенным на оптической траектории зеркального отражения 2430 падающего инфракрасного следящего светового сигнала 130 от меток инфракрасной обратной связи на экране 101. Местоположение инфракрасного следящего детектора 2530 определяется смещением 2503 для приема зеркального отражения 2430 падающего инфракрасного следящего светового сигнала 2130 от каждой метки инфракрасной обратной связи на экране 101. Возвращенный инфракрасный свет в направлении, отличном от направления зеркального отражения от каждой метки инфракрасной обратной связи, отклоняется линзой 2510 Френеля для того, чтобы он не попал на инфракрасный следящий детектор 2530, когда отклонение от траектории зеркального отражения превышает размер апертуры инфракрасного следящего детектора 2530. При такой конфигурации инфракрасный следящий детектор 2530 получает лишь очень малую часть возвращенного инфракрасного следящего светового сигнала в диффузном отражении 2440 из области между метками инфракрасной обратной связи, в то время как большая часть возвращенного инфракрасного следящего светового сигнала в диффузном отражении 2440 не попадает в инфракрасный следящий детектор 2530. В противоположность этому, инфракрасный следящий детектор 2530 получает свет в возвращенном зеркальном отражении 2430 падающего инфракрасного следящего светового сигнала 130 от каждой метки инфракрасной обратной связи на экране 101. На основе этого различия сигналы от инфракрасного следящего детектора 2530 можно использовать для определения попадания сканирующего инфракрасного следящего луча 130 на метку инфракрасной обратной связи.
Свет луча 120 возбуждения также может отражаться назад зеркальными и диффузионными зонами на экран 101. Зеркально отраженный свет на длине волны возбуждения направляется обратно в место расположения инфракрасного следящего детектора 2530. Для расщепления полученного света на длине волны следящего луча и полученного света на длине волны луча возбуждения на два отдельных сигнала для отдельных оптических детекторов (инфракрасного следящего детектора 2530 для получения инфракрасного следящего светового сигнала и другого следящего детектора для получения светового сигнала обратной связи на длине волны возбуждения) можно использовать избирательный оптический расщепитель луча.
Сканирующий инфракрасный следящий луч 130 может быть непрерывным (CW) лучом. Фактически каждое попадание на метку инфракрасной обратной связи на экране создает оптический импульс в инфракрасном следящем детекторе 2530. При каждой горизонтальной развертке инфракрасный следящий детектор 2530 обнаруживает последовательность оптических импульсов, которые соответствуют разным меткам инфракрасной обратной связи на экране. Выходной сигал инфракрасного следящего детектора 2530 аналогичен выходным сигналам детектора, показанным на Фиг.13-17, и полученным благодаря использованию разделителей люминофорных полос в качестве меток инфракрасной обратной связи, за исключением того, что интервал между импульсами в выходном сигнале инфракрасного следящего детектора 2530 во времени больше, причем он соответствует интервалу между метками инфракрасной обратной связи. Аналогичным образом, для определения горизонтального местоположения сканирующего инфракрасного следящего луча 130 можно использовать сигналы SOL или EOL, а для определения вертикального положения сканирующего инфракрасного следящего луча 130 можно использовать вертикальные опорные метки.
В примерах системы на Фиг.1, 6 и 7 световой сигнал возбуждения/следящей обратной связи можно использовать в сочетании со следящей обратной связью на основе невидимого следящего луча 130. В указанных системах наряду со следящим управлением результаты измерений позиционирования, полученные по обратной связи через инфракрасный следящий световой сигнал и сигнал следящей обратной связи по возбуждению, полученной через световой сигнал возбуждения, можно использовать для калибровки их друг относительно друга. Например, указанную систему отображения можно запустить для выполнения калибровки с использованием луча 120 возбуждения и инфракрасного следящего луча 130 для развертки по всему экрану 101 с целью выполнения измерений для поддержки карты положений для экрана 101 и использования карты положений, полученной с использованием луча 120 возбуждения, для калибровки карты положений, полученной с использованием инфракрасного следящего луча 130. На основе такой калибровки во время нормальной работы системы можно использовать обратную связь с помощью инфракрасного следящего луча 130 без использования обратной связи на основе следящей обратной связи с помощью луча возбуждения, для контроля экрана 101 и управления синхронизацией импульсов в луче 120 при каждой горизонтальной развертке.
В некоторых вариантах реализации можно спроектировать экран 101, где для создания видимого света используется именно световой сигнал возбуждения путем уменьшения оптических потерь света в луче 120 возбуждения. Например, экран может быть сконструирован таким образом, чтобы исключить любое оптическое отражение обратно в лазерный модуль 110 путем использования, например, оптического слоя на стороне возбуждения люминофорного слоя для пропускания луча возбуждения на люминофорный слой и возвращения светового сигнала возбуждения от люминофорного слоя обратно на люминофорный слой. При применении указанной конструкции возможны трудности с использованием света от луча 120 возбуждения для создания следящего луча 122. В последующих разделах описаны конструкции системы, где для создания видимого следящего луча и обеспечения второго механизма обратной связи вдобавок к следящей обратной связи на основе невидимого инфракрасного луча, используется видимый свет, излучаемый люминофорным слоем на экране 101.
На Фиг.26 показан пример системы 2600 отображения со сканирующими лучами, которая обеспечивает следящую обратную связь на основе инфракрасного следящего луча 130 и вторую следящую обратную связь на основе обнаружения видимого света, излучаемого люминофорным слоем экрана. В этой системе для обнаружения красного, зеленого и синего света, излучаемого экраном 101, используют оптический следящий измерительный блок 2610 излучения от экрана. Следящий измерительный блок 2610 может находиться в том месте, где можно обнаружить излученный видимый свет от экрана 101, например, со стороны зрителя экрана 101, или со стороны возбуждения экрана 101, как здесь показано, причем местоположение следящего измерительного блока 2610 можно выбрать на основе конструкции экрана и топологии системы. В измерительном блоке 2610 предусмотрено три оптических детектора PD1, PD2 и PD3 для обнаружения красного, зеленого и синего флуоресцентного света соответственно. Каждый оптический детектор предназначен для приема света от части всего экрана 101. Перед каждым оптическим детектором может быть размещен полосовой оптический фильтр для выбора нужного цвета и подавления света других цветов. Этот измерительный блок 2610 создает сигнал 2612 следящей обратной связи, подаваемый в лазерный модуль 110 для управления работой системы.
Одним из способов коррекции горизонтального рассогласования в системах отображения по Фиг.26 является программирование процессора отображения в лазерном модуле 110 для управления синхронизацией оптических импульсов на основе ошибки положения, обнаруженной в сигнале 2612 обратной связи. Например, лазерный модуль 110 может задержать модулированный сигнал изображения, переносимый модулированным лазерным лучом 120, на один временной сегмент цветного субпикселя, если у детектора зеленого имеется выходной сигнал, а у детекторов красного и синего их нет, или на два временных сегмента цветного субпикселя, если у детектора синего имеется выходной сигнал, а у детекторов красного и зеленого их нет. Такая коррекция ошибки пространственного согласования на величину временной задержки может быть обеспечена в цифровом виде в процессоре отображения. Тогда нет необходимости физической настройки блоков оптического сканирования и создания изображения в лазерном модуле 110. В альтернативном варианте имеется ввиду возможность настройки блока контроллера в лазерном модуле 110 с целью физического сдвига положения луча 120 возбуждения на экране 101, с тем чтобы отрегулировать положение лазерного луча на экране 101 по горизонтали влево или вправо на один субпиксель в соответствии с ошибкой, обнаруженной следящим измерительным блоком 2610. Оптическое согласование путем физической настройки сканирующего лазерного луча 120 и электронного или цифрового согласования путем управления синхронизацией оптических импульсов может сочетаться с управлением, обеспечивающим необходимое горизонтальное согласование.
Для проверки горизонтального согласования в системе 2600 отображения по Фиг.26 можно использовать некоторую тестовую комбинацию. Например, для тестирования согласования в качестве тестовой комбинации можно использовать кадр одного (красного, зеленого или синего) цвета. На Фиг.27А показана тестовая комбинация для цветного пикселя, запечатленного детекторами в следящем измерительном блоке 2610, и соответствующие выходные сигналы трех детекторов PD1, PD2 и PD3 при правильном горизонтальном согласовании. На Фиг.27В, 27С и 27D показано три различных отклика, созданных тремя детекторами PD1, PD2 и PD3 при наличии рассогласования в горизонтальном направлении. Отклики детекторов подаются в лазерный модуль 110 и используются для создания временной задержки каким-либо способом или согласования (сопряжения) оптики, создающей изображение с помощью луча, для коррекции горизонтального рассогласования.
Следовательно, управление со следящей обратной связью на основе измерения видимого света, излучаемого экраном (Фиг.26), реализуется во время специальной операции калибровки системы 2600, когда система 2600 не отображает изображения для зрителя. Такой тип управления с обратной связью является «статическим», поскольку система выводится из ее нормального режима отображения и работает с тестовыми комбинациями для измерения параметров согласования экрана 101. Например, такой алгоритм со статической следящей обратной связью может выполняться один раз при включении питания системы отображения или при создании начальной карты на предприятии-изготовителе, прежде чем система начнет нормальное отображение изображения на экране 101, причем может быть обеспечено управление системой отображения для выполнения начальной калибровки тактовых импульсов для выравнивания лазерных импульсов в соответствии с положениями центров субпикселей. В отличие от статического следящего управления динамическое следящее управление можно реализовать также и в то время, когда система работает в режиме нормального отображения. Например, алгоритм с динамической обратной связью выполняется непрерывно во время нормальной работы системы отображения. Эта динамическая следящая обратная связь поддерживает синхронизацию импульсов в соответствии с положением центра субпикселя, несмотря на изменения температуры, перемещение экрана, деформирование экрана, старение системы и другие факторы, которые могут нарушить согласование между лазером и экраном. Динамическое следящее управление выполняется во время отображения видеоданных на экране и рассчитано таким образом, что зритель его не ощущает. Такое динамическое управление обеспечивается средствами невидимого следящего управления в системе 2600 по Фиг.26.
На Фиг.28 показан пример конструкции для оптического следящего управления с использованием следящего оптического датчика 4501 видимого света, размещенного на расстоянии от флуоресцентного экрана 101 со стороны зрителя экрана 101 в системе 2600 отображения со сканирующими лучами. Оптический датчик 4501 может быть сконфигурирован и расположен таким образом, чтобы обеспечить обзор всего экрана 101. Между экраном 101 и датчиком 4501 можно использовать собирающую линзу для приема флуоресцентного света от экрана 101. Оптический датчик 4501 может включать в себя по меньшей мере один оптический детектор для обнаружения флуоресцентного света выбранного цвета, например, зеленого, из различных цветов (например, красный, зеленый и синий), излучаемых экраном 101. В зависимости от конкретных способов, используемых в следящем управлении в некоторых вариантах реализации, возможно, что окажется достаточным, иметь один детектор для одного цвета, а в других вариантах реализации может понадобиться два или более оптических детекторов для обнаружения двух или более цветов флуоресцентного света от экрана 101. Для обеспечения избыточности для следящего управления можно использовать дополнительный детектор. Что касается опорных меток для создания опорных сигналов, обнаружения указанных опорных сигналов и функции управления на основе опорных сигналов от опорных меток, то следящее управление можно совместить с управляющими функциями опорных меток для системы. В примере, описанном ниже, в качестве точки отсчета времени для статического следящего управления синхронизацией оптических импульсов сканирующего луча можно использовать опорную метку начала строки вне области экрана, имеющей флуоресцентные полосы.
В примере на Фиг.28 оптический датчик 4501 включает в себя три следящих оптических детектора 4510, 4520 и 4530 (например, фотодиоды), которые соответственно обнаруживают три разных цвета, излучаемых экраном 101. Фотодиоды 4510, 4520 и 4530 собраны в три группы, причем каждая группа снабжена красным фильтром 4511, зеленым фильтром 4521 или синим фильтром 4531, так что указанные три фотодиода 4510, 4520 и 4530 получают соответственно три разных цвета. Каждый фильтр можно реализовать в различных конфигурациях, например, в виде пленки, которая делает фотодиод чувствительным только к одному из цветов (красный, зеленый или синий) от просмотрового экрана.
Схема детектора для каждой цветовой группы может включать в себя предусилитель 4540, интегратор сигнала (например, накопитель заряда) 4541 и аналого-цифровой преобразователь 4540 для оцифровки сигнала детектора красного, зеленого или синего с целью его обработки в цифровой схеме 4550 следящего управления, которая может представлять собой микрокомпьютер или микропроцессор. Интенсивности красного, зеленого и синего флуоресцентного света, излучаемого экраном 101, можно измерить и передать результаты измерений в цифровую схему 4550 следящего управления. Цифровая схема 4550 следящего управления может создать и использовать сигнал 4552 сброса с целью сброса интеграторов 4541 для управления операцией интегрирования, выполняемой детекторами. Используя эти сигналы, цифровая схема 4550 следящего управления может определить, имеется ли ошибка согласования сканирующего лазерного луча на экране 101, и на основе обнаруженной ошибки решить, следует ли сдвинуть тактовые импульсы лазера во времени вперед или назад, чтобы сцентрировать лазерные импульсы на субпикселях на экране 101.
Описанные здесь операции статического следящего управления выполняются тогда, когда система отображения не работает в нормальном режиме отображения изображений на экране. Следовательно, можно избежать регулярной кадровой развертки в обоих направлениях с использованием гальванометрического вертикального сканера и полигонального горизонтального сканера во время нормальной работы. Вертикальное сканирование гальванометрическим сканером можно использовать для направления сканирующего лазерного луча в желаемое вертикальное положение и фиксации в этом положении для выполнения многократных горизонтальных разверток с разными временными задержками в синхронизации лазерного импульса для получения необходимого сигнала ошибки, указывающего ошибку синхронизации лазера при горизонтальной развертке. Вдобавок, во время операции статического следящего управления для создания сигнала ошибки можно использовать специальную комбинацию лазерных импульсов (например, Фиг.27А-D и 29), которая не переносит сигналы изображения.
При статическом следящем управлении комбинацию лазерных импульсов для лазера можно выбрать так, чтобы получился сигнал, пропорциональный ошибке положения лазерных импульсов на экране 101. В одном варианте реализации, где используется множество лазеров, один лазер единовременно выдает импульс на экран 101, а остальные лазеры выключены. Этот режим работы позволяет оценить синхронизацию каждого лазера и независимо ее скорректировать в процессе статического следящего управления.
На Фиг.29 и 30 показан один примерный способ и средства формирования сигнала ошибки для реализации статического следящего управления. На Фиг.29 показан пример тестовой комбинации оптических импульсов, используемой для модуляции сканирующего лазерного луча, который имеет периодическую комбинацию лазерных импульсов. Ширина импульса во время этой тестовой комбинации импульсов соответствует пространственной ширине на экране, которая превышает ширину (d) границы между двумя соседними субпикселями и вдвое меньше ширины (D) субпикселя (одна флуоресцентная полоса). Например, ширина импульса во время этой комбинации импульсов соответствует пространственной ширине, равной ширине (D) субпикселя. Время повторения комбинации импульсов соответствует пространственному разнесению двух соседних лазерных импульсов на экране, которое равно ширине (3D) одного цветового импульса (три последовательных флуоресцентных полосы).
При работе синхронизацию комбинации лазерных импульсов на Фиг.29 настраивают таким образом, чтобы каждый лазерный импульс частично перекрывал один субпиксель и соседний субпиксель для возбуждения света различных цветов в двух соседних субпикселях. Таким образом, лазерный импульс, перекрывающий два соседних субпикселя (например, красный субпиксель и зеленый субпиксель), имеет участок возбуждения красного, который перекрывается с красным субпикселем, для создания красного света и участок возбуждения зеленого, который перекрывается с соседним зеленым субпикселем, для создания зеленого света. Для определения того, совпадает ли центр лазерного импульса с центром границы между двумя соседними субпикселями и сдвига между центром лазерного импульса и центром границы, используют относительные уровни мощности излученного красного света и излученного зеленого света. В процессе следящего управления на основе указанного сдвига положений настраивают синхронизацию комбинации лазерных импульсов для уменьшения этого сдвига и выравнивания центра лазерного импульса с центром границы. После завершения этого выравнивания в ходе следящего управления корректируют синхронизацию комбинации лазерных импульсов (упреждение или задержка) для сдвига каждого лазерного импульса на половину ширины субпикселя, чтобы центр лазерного импульса совпал с центром любого из двух соседних субпикселей. Этим завершается согласование лазера с цветным пикселем. Во время вышеописанного процесса вертикальный сканер фиксируется для направления лазера при согласовании в фиксированное вертикальное положение, а горизонтальный полигональный сканер периодически разворачивает лазерный луч вдоль одной и той же горизонтальной строки для создания сигнала ошибки.
В вышеописанном процессе для определения сдвига между положениями центра лазерного импульса и центра границы между двумя соседними субпикселями используют относительные уровни мощности излученного красного света и излученного зеленого света. Один из путей реализации описанного способа состоит в использовании дифференциального сигнала на основе разности количества света, излученного двумя разными люминофорными материалами. На реализацию этого способа по Фиг.28 может повлиять несколько факторов, связанных с обнаружением следящих сигналов. Например, разные флуоресцентные материалы, используемые для излучения различных цветов, могут иметь разную эффективность излучения на данной длине волны возбуждения, так что при использовании одного и того же сканирующего луча возбуждения два соседних субпикселя могут излучать свет двух разных цветов (например, зеленый и красный) с разными уровнями мощности. В другом примере, световые фильтры 4511, 4521 и 4531 для пропускания красного, зеленого и синего цветов могут иметь разные коэффициенты пропускания. Еще в одном примере оптические детекторы 4510, 4520 и 4530 могут иметь разную чувствительность обнаружения для трех разных цветов, и поэтому при одном и том же количестве света, поступающем на детекторы разных цветов, выходные сигналы детекторов могут отличаться. Рассмотрим теперь состояние, когда центр лазерного импульса выровнен с центром границы между двумя соседними субпикселями, в связи с чем лазерный импульс оказывается поровну разделенным между двумя соседними субпикселями. Из-за вышеописанных и других факторов следящие оптические детекторы, соответствующие цветам излучения двух соседних субпикселей, могут создать два выходных сигнала на двух разных уровнях, когда лазерный импульс поровну разделен между двумя соседними субпикселями. Следовательно, для данной системы отображения сигналы следящих детекторов можно калибровать для учета вышеуказанных и других факторов, чтобы точно представить сдвиг положения лазерного импульса. Такая калибровка может быть обеспечена аппаратными средствами, программными средствами (при цифровой обработке сигнала в цифровой схеме 4550 следящего управления на Фиг.28) или комбинацией аппаратных средств и программных средств обработки сигнала. В последующих разделах предполагается, что необходимая калибровка реализована так, что когда лазерный импульс распределен поровну между двумя соседними субпикселями, откалиброванные выходные сигналы двух разных следящих оптических детекторов равны.
Таким образом, в условиях надлежащего согласования одна половина каждого лазерного импульса попадает на зеленый субпиксель, а другая половина того же импульса на соседний, красный субпиксель. Эта комбинация импульсов создает равное количество красного и зеленого света на следящих детекторах при правильном согласовании. Таким образом, разность между выходным напряжением детектора красного и выходным напряжением детектора зеленого представляет собой сигнал ошибки, указывающий правильность согласования. При правильном согласовании дифференциальный сигнал между детекторами красного и зеленого равен нулю, а при неправильном согласовании эта разность имеет либо положительное, либо отрицательное значение, указывающее направление сдвига при согласовании. Такое использование дифференциального сигнала между двумя цветовыми каналами может исключить необходимость измерения абсолютного значения амплитуды светового сигнала, излучаемого люминофором просмотрового экрана. В альтернативном варианте разность между двумя разными цветовыми каналами (детекторами синего и красного или детекторами зеленого и синего) также можно использовать для индикации ошибки согласования или юстировки. В некоторых вариантах реализации, поскольку длина волны синего света ближе всего к длине волны падающего лазерного света, используемого для возбуждения, можно более практично использовать разность сигналов детекторов зеленого и синего для следящего управления. Для создания сигнала обнаружения используют подсоединенный к цифровой схеме 4550 оптический датчик, воспринимающий свет от опорной метки, который отделен от оптического датчика 4501 для обнаружения флуоресцентного светового сигнала обратной связи от экрана по Фиг.28.
При статическом следящем управлении начальный момент сканирования может быть скорректирован первый раз с использованием тестовой комбинации импульсов в сканирующем лазерном луче. Синхронизацию корректируют для первой группы соседних пикселей вдоль горизонтальной развертки (например, 5 пикселей), затем для следующей группы соседних пикселей одного и того же размера, например, следующей группы из 5 пикселей, затем для следующей группы из 5 пикселей, пока не будет скорректирована вся развертка для данного лазера. Здесь количество пикселей, равное 5, выбрано в качестве примера для иллюстрации. Указанную группировку пикселей можно использовать для сокращения времени, необходимого для следящего управления и увеличения отношения сигнал-шум для сигнала ошибки при объединении сигналов, созданных от разных пикселей в одной группе. На практике количество пикселей для каждой группы можно выбрать на основе конкретных требований к системе отображения. Например, ошибку начальной синхронизации можно считать серьезной, когда небольшая ошибка синхронизации может привести к появлению большого количества последовательных пикселей в группе для следящего управления, а при большой ошибке синхронизации может понадобиться меньшее количество последовательных пикселей для объединения в группы для следящего управления. При каждом измерении ошибка синхронизации сканирующего луча может быть скорректирована до одного тактового цикла цифрового генератора тактовых сигналов цифровой схемы 4550 следящего управления. На Фиг.28 цифровая схема 4550 следящего управления представляет собой микроконтроллер, предназначенный для управления синхронизацией каждого отдельного лазера и используемый для коррекции синхронизации лазерного импульса для каждого пикселя.
Заметим, что различные люминофоры могут проявлять последействие при флуоресцентной эмиссии. Это свойство люминофоров может привести к тому, что люминофор будет светиться после того, как лазерный импульс переместился к следующему пикселю. Обратимся к Фиг.28, на котором для компенсации этого эффекта люминофора интегратор 4541 сигнала может быть подсоединен к выходу предусилителя 4540 для каждого следящего детектора. Интегратор 4541 можно использовать для эффективного «суммирования» всего света для данного предусилителя 4540 по множеству пикселей, когда напряжение на шине сброса интегратора имеет низкий уровень, при котором интегратор находится в режиме интегрирования. Когда микроконтроллер инициирует аналого-цифровой отсчет, выполняется замер суммарного света для данного цвета. Затем для сброса интегратора напряжение на шине 4552 сброса для каждого интегратора переводят на высокий уровень, пока напряжение на выходе интегратора не вернется обратно в нуль, после чего напряжение на шине сброса вновь переводят на низкий уровень для повторного запуска нового периода интегрирования, в течение которого интегратор 4541 вновь начинает суммирование света.
На Фиг.30 показано, каким образом изменяется сигнал ошибки при изменении синхронизации лазера от его номинального положения непосредственно в центре между красным и зеленым субпикселями, с использованием комбинации лазерных импульсов по Фиг.29. Когда напряжение ошибки дифференциального сигнала на основе комбинации лазерных импульсов по Фиг.21 равно нулю, как показано на Фиг.30, имеет место одинаковое количество красного и зеленого света на следящих детекторах красного и зеленого, и синхронизация лазерных импульсов напрямую обеспечивается по границам между двумя соседними субпикселями. При этом сигнал ошибки на каждом отсчете представляет ошибку синхронизации лазера только за период после предыдущего импульса сброса. Используя эту схему, можно создать скорректированную карту синхронизации лазера для каждого лазера на каждом горизонтальном проходе, пока не будет скорректирована синхронизация по всему экрану для каждого лазера. Для изменения вертикального положения горизонтального сканирующего луча для каждого лазера используют вертикальный сканер.
В вышеописанном способе создания статического сигнала ошибки в качестве точки отсчета согласования для выравнивания лазерного импульса в комбинации лазерных импульсов используется граница между двумя соседними субпикселями. В альтернативном варианте в качестве точки отсчета согласования для центрирования лазерных импульсов непосредственно по субпикселями без использования границ между двумя соседними субпикселями можно непосредственно использовать центр каждого субпикселя. При использовании этого альтернативного способа для создания сигнала ошибки в целях следящего управления достаточно иметь выходной сигнал от следящего оптического детектора одного цвета. Для обеспечения точки отсчета для синхронизации и облегчения согласования можно использовать опорную метку согласования, такую как периферийная опорная метка согласования для начала строки (SOL) на Фиг.12 и отдельный оптический детектор SOL, который обнаруживает световой сигнал обратной связи от метки SOL. Смотри Фиг.28, где оптический детектор SOL подсоединен для направления своего выходного сигнала в цифровую схему 4550 следящего управления.
Альтернативный способ статического следящего управления можно реализовать следующим образом. Тестовая комбинация импульсов, имеющая по меньшей мере один импульс, соответствующий одному субпикселю в пикселе, используется для модуляции сканирующего лазерного луча, где ширина импульса соответствует ширине (D) одного субпикселя или меньше этой ширины. При горизонтальной развертке синхронизация лазера настраивается по первой группе субпикселей развертки после обнаружения сигнала SOL оптическим детектором SOL. На основе точки отсчета синхронизации из сигнала SOL выполняется настройка синхронизации комбинации лазерных импульсов для максимизации обнаруженной оптической мощности одного из трех цветов, излучаемых флуоресцентным экраном, например, зеленый свет (или красный или синий). Эта настройка может быть достигнута переводом лазера в импульсный режим (в режиме один импульс на пиксель) и настройкой синхронизации лазера. При максимизации зеленого света на первых 5 пикселей импульсы поступают на следующие пять зеленых субпикселей. Синхронизация сдвигается вперед на один тактовый цикл во время одной горизонтальной развертки, затем задерживается на один тактовый цикл на следующих горизонтальных развертках лазерного луча при одинаковом вертикальном положении на экране. В качестве правильной синхронизации лазера выбирается синхронизация, обеспечивающая максимум зеленого света. Если выходной сигнал при тактовом цикле с упреждением равен выходному сигналу при тактовом цикле с задержкой, то тогда синхронизация лазера правильная и остается без изменения. Затем облучают следующие 5 пикселей с использованием упрежденного и задержанного тактовых циклов, и для этой группы из 5 пикселей выбирается синхронизация, которая обеспечивает максимум зеленого света. Операция повторяется по всей горизонтальной длине экрана, пока не будет достигнут его конец. Согласно этому способу также можно создать тактовые импульсы, скорректированные для каждого лазера, когда луч от лазера разворачивается по горизонтали через экран.
Вышеописанные операции статического следящего управления выполняются, когда система отображения не находится в нормальном режиме, и поэтому можно использовать тестовую комбинацию импульсов (например, по Фиг.29), которая не несет сигналы изображения. Динамическая коррекция следящего управления выполняется путем использования невидимого инфракрасного сигнала следящей обратной связи во время нормальной работы и просмотра изображений на экране.
В данной горизонтальной развертке все лазеры могут быть сдвинуты по фазе вперед на один тактовый цикл цифровой схемы 4550. Эта операция приведет к тому, что положение всех лазерных лучей сдвинется на экране на расстояние сканирования на одном тактовом цикле, причем этот сдвиг будет мал, когда расстояние сканирования мало (например, меньше одной десятой ширины субпикселя). Соответственно, незначительно изменится амплитуда цветного света, излучаемого субпикселем (например, детектор зеленого). На следующем кадре все лазеры сдвигаются по фазе назад на один тактовый цикл. Если номинальное положение лазерного импульса изначально является правильным, то амплитуды развертки с задержкой и развертки с упреждением для двух разных, но последовательных кадров изображения должны быть равны для любого цвета, выбранного для измерения и наблюдения. Когда амплитуды разверток с задержкой и упреждением для двух разных кадров отличаются, имеет место ошибка синхронизации лазера, и тогда синхронизация лазера может быть скорректирована для уменьшения различия в последовательных кадрах изображения при непрерывном контроле сигнала ошибки, причем коррекция обновляется на основе вновь созданного сигнала ошибки. Знак разности указывает направление сдвига в ошибке синхронизации лазера, так что при следящем управлении может применяться коррекция для исключения указанного сдвига. По аналогии с вышеописанным вторым способом статического следящего управления, для создания сигнала ошибки для динамического следящего управления, достаточно использовать выходной сигнал от следящего оптического детектора одного цвета.
На Фиг.31 показан более подробный пример системы сканирования на основе невидимой динамической следящей обратной связи и статической следящей обратной связи с использованием видимого света. На стороне возбуждения экрана 101 для обнаружения инфракрасного следящего сигнала 132, отраженного от экрана 101, предусмотрен инфракрасный следящий детектор 620, в то время как для обнаружения видимого света 3120, излучаемого экраном, с целью обеспечения сигналов следящего детектора видимого света, которые подаются в процессор/контроллер 640 отображения, предусмотрены следящие детекторы 3110 видимого света. Статическую следящую обратную связь на основе видимого света используют для калибровки карты положений для динамической инфракрасной следящей обратной связи во время выполнения калибровки системы, а откалиброванную динамическую инфракрасную следящую обратную связь используют во время работы системы для коррекции ошибок согласования луча.
Хотя эта патентная заявка содержит множество конкретных деталей, их не следует рассматривать как ограничение объема изобретения или того, что может быть предметом заявки, а скорее как описание признаков, характерных для конкретных вариантов изобретения. Некоторые признаки, описанные в этой Патентной заявке в контексте отдельных вариантов, также могут быть реализованы в их комбинации в едином варианте. Наоборот, различные признаки, описанные в контексте одного варианта, также могут быть реализованы во множестве вариантов по отдельности или в любой подходящей подкомбинации. Кроме того, хотя признаки возможно были описаны выше как работающие в определенных комбинациях и даже изначально заявленные как таковые, один или несколько признаков из заявленной комбинации в некоторых случаях могут быть исключены из этой комбинации, а заявленная комбинация может относиться к подкомбинации или варианту подкомбинации.
Здесь раскрыты только несколько вариантов реализации изобретения. Однако на основе материала, описанного и проиллюстрированного в этой патентной заявке, могут быть предложены изменения и усовершенствования описанных и других вариантов реализации изобретения.
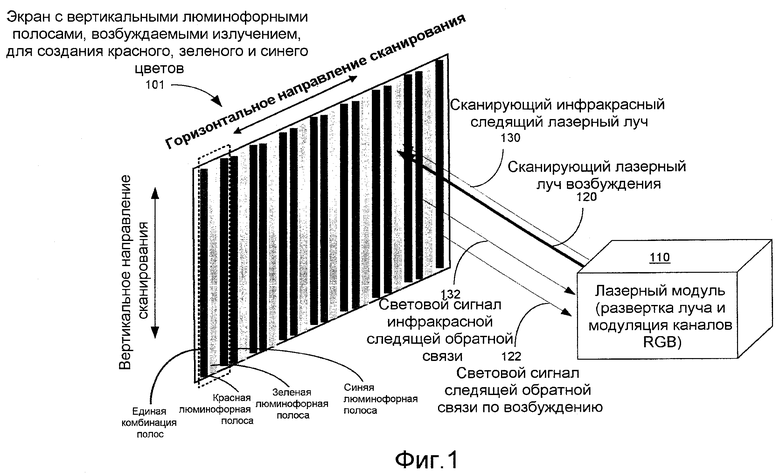

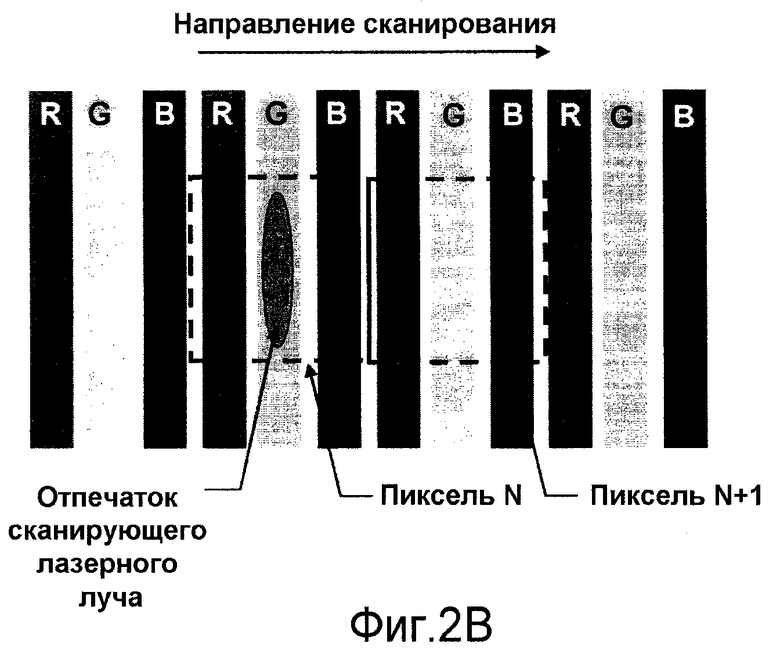
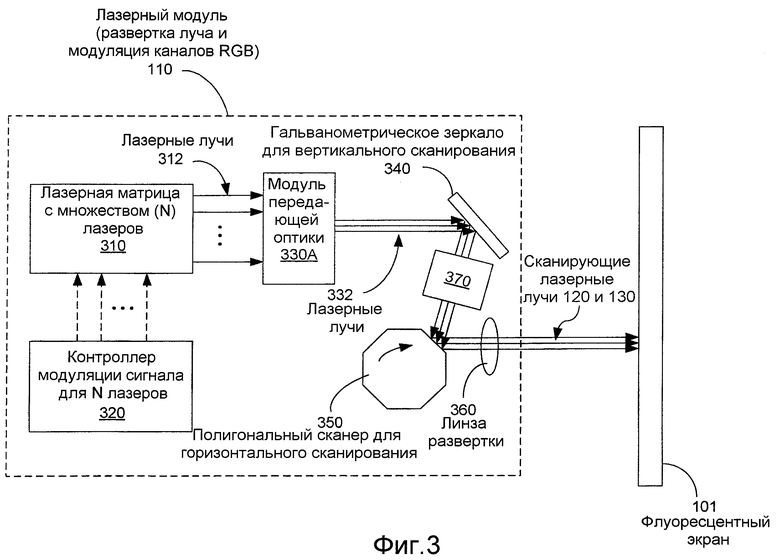
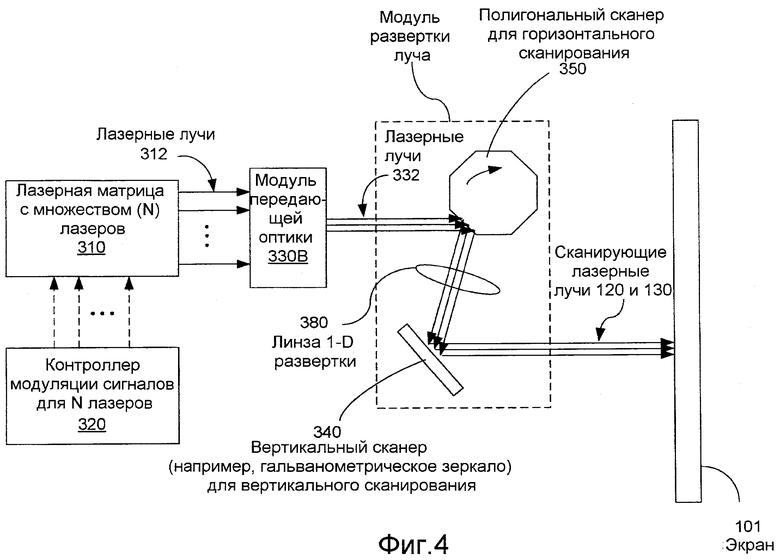
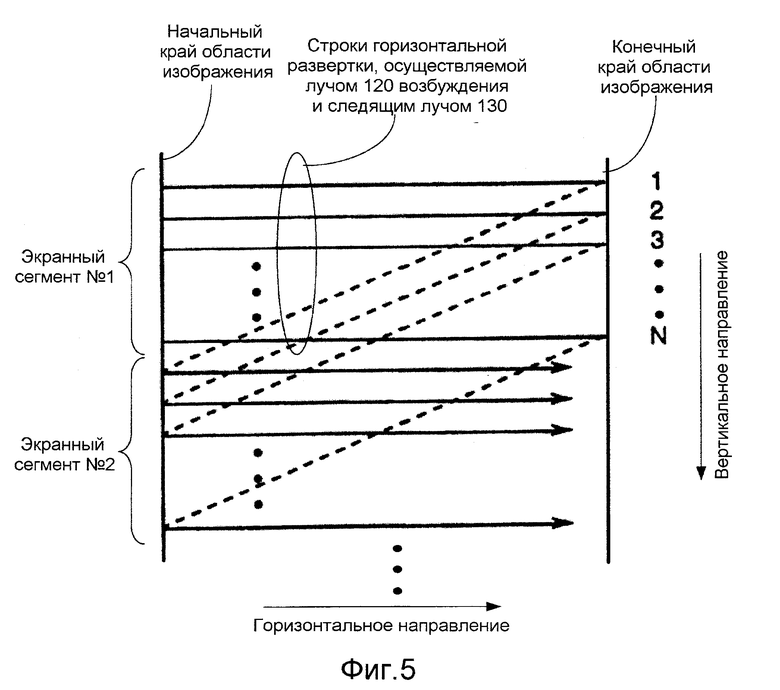
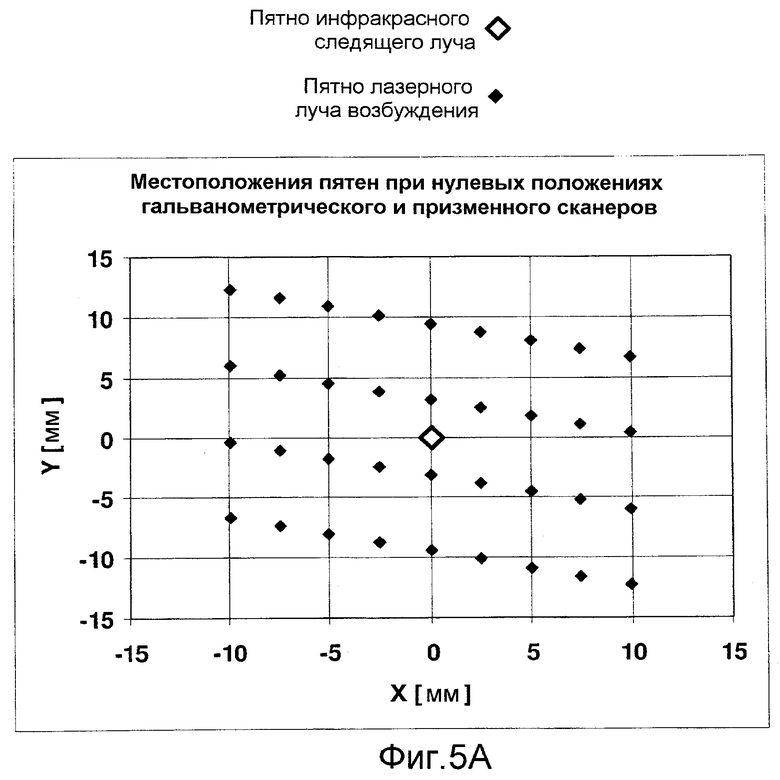
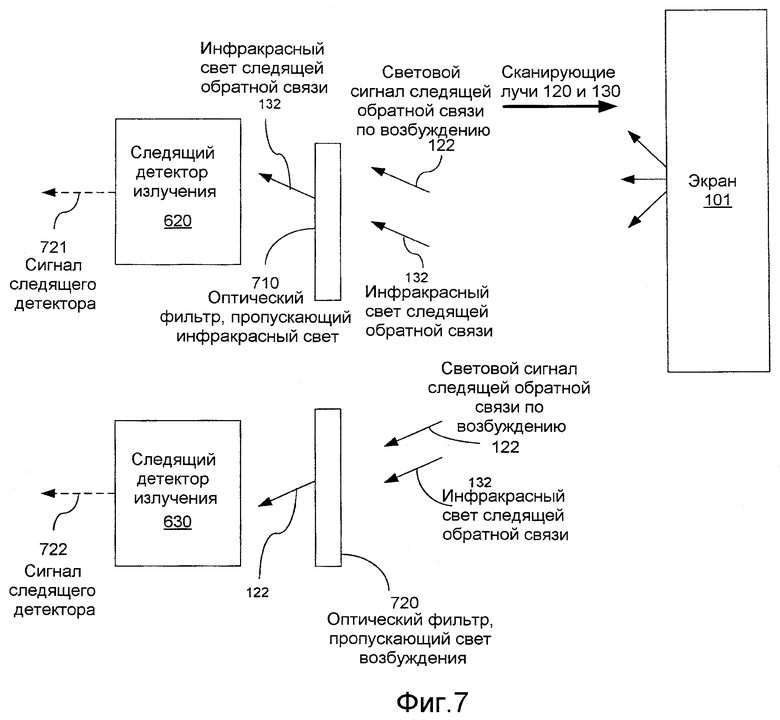
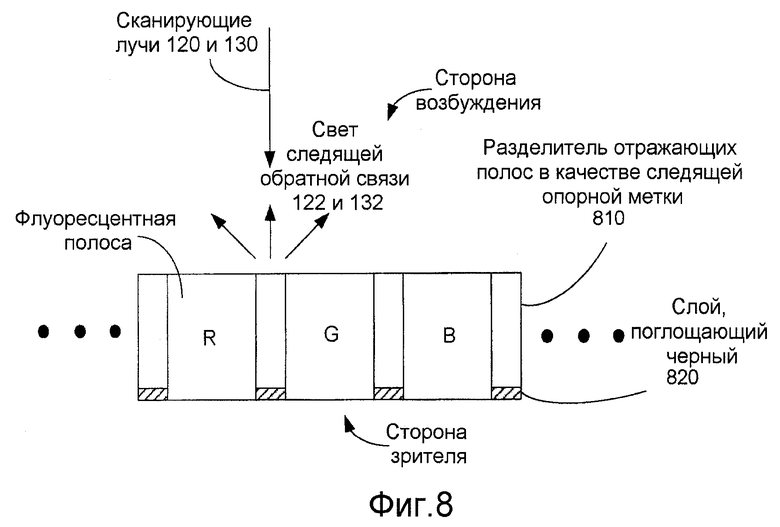
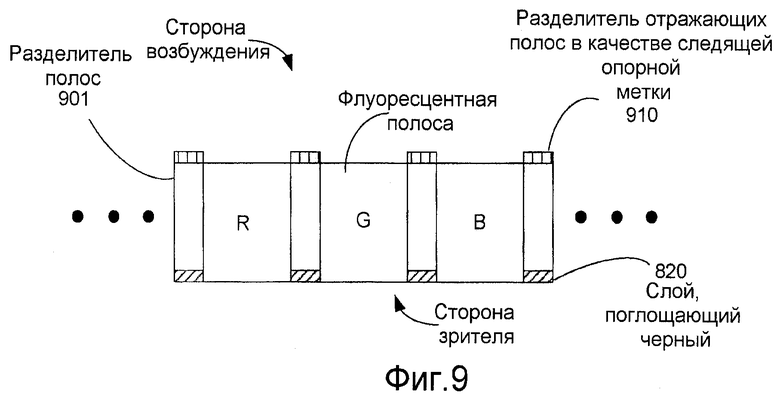
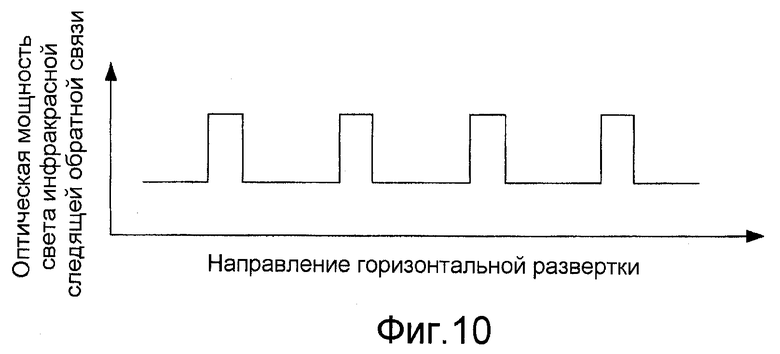
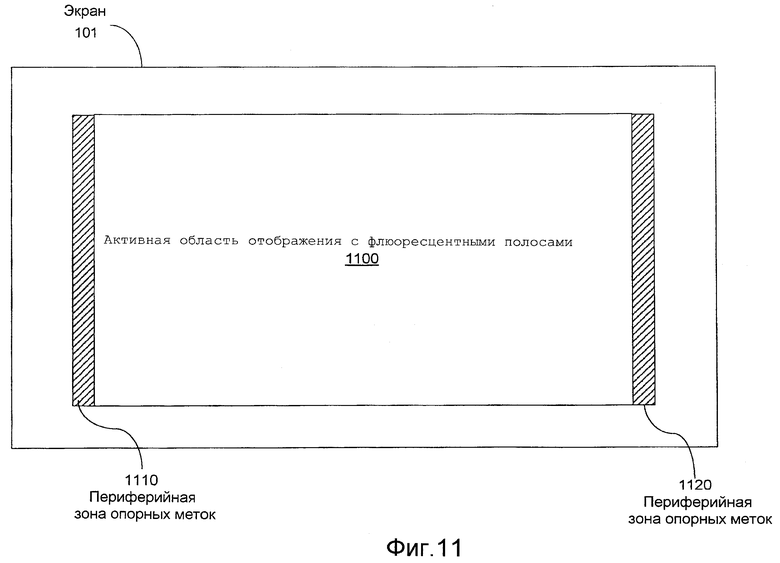
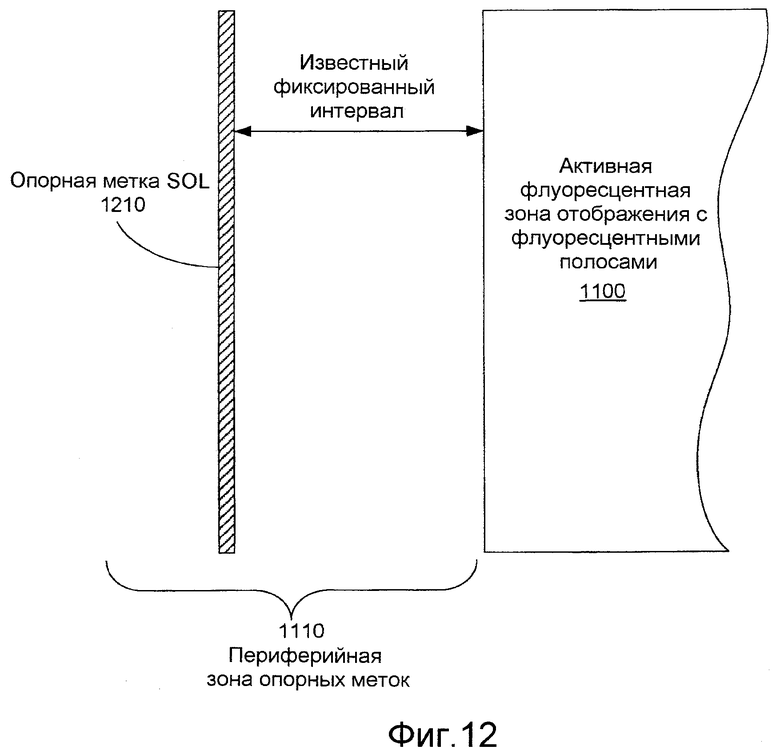
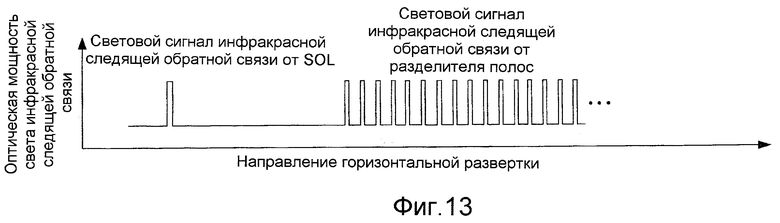
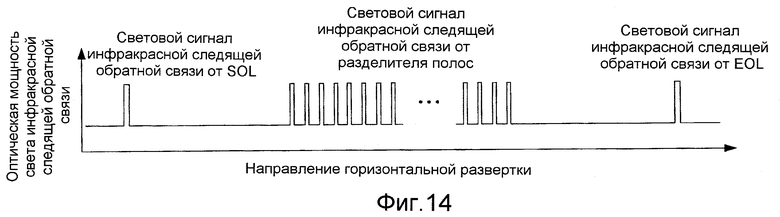
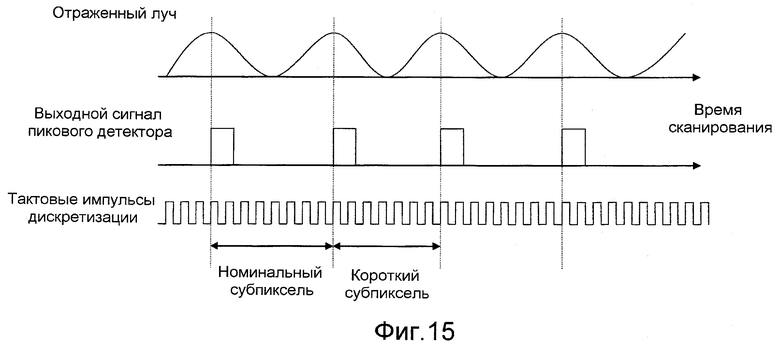
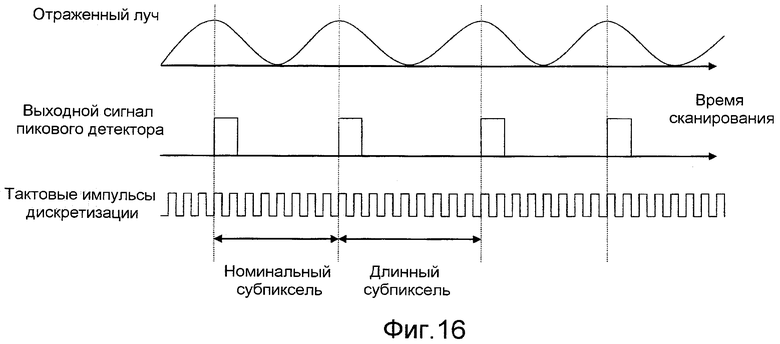
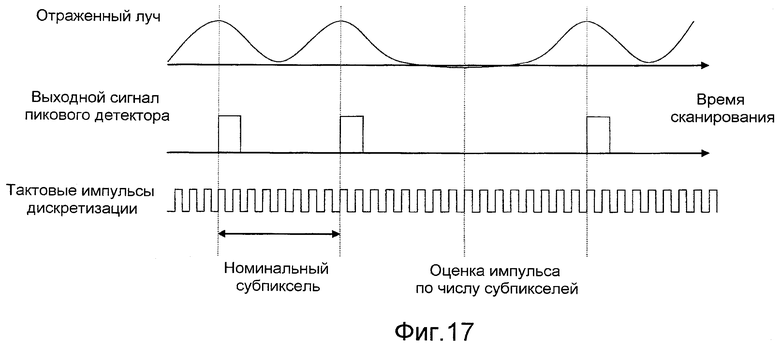
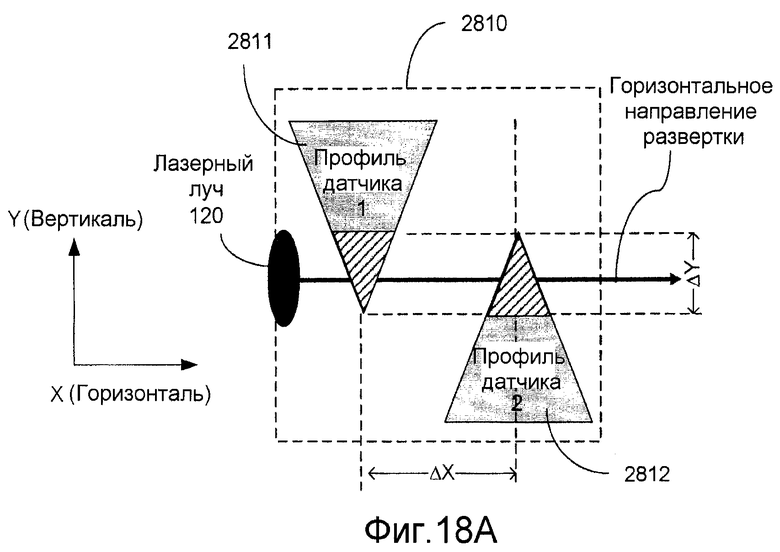
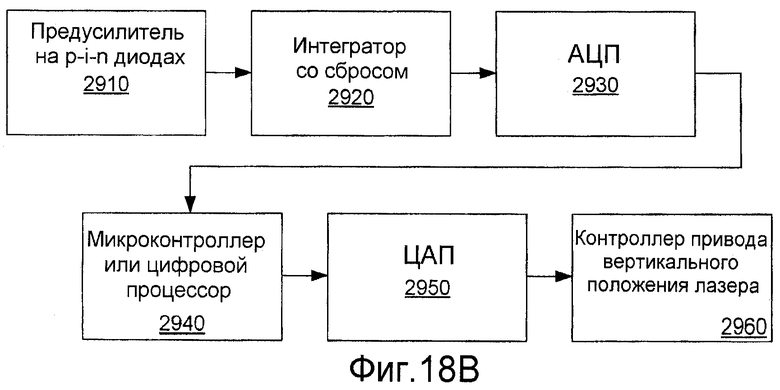
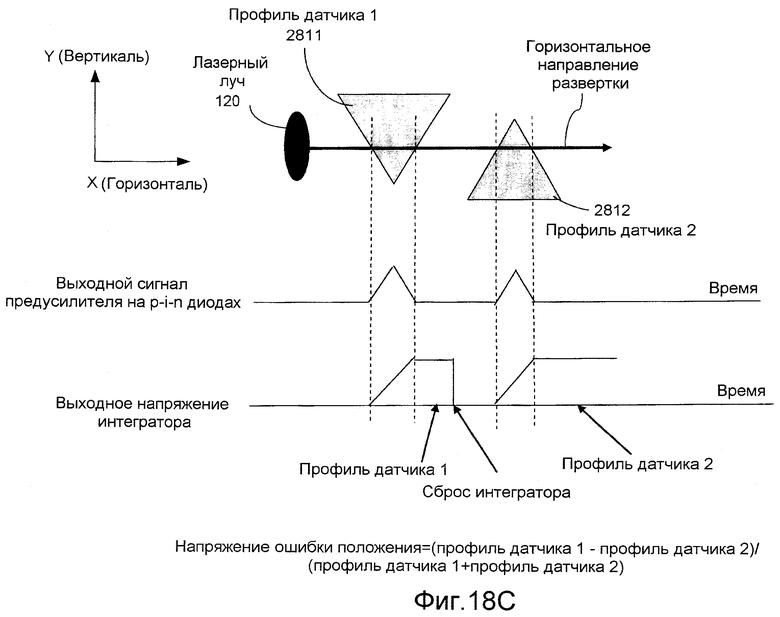
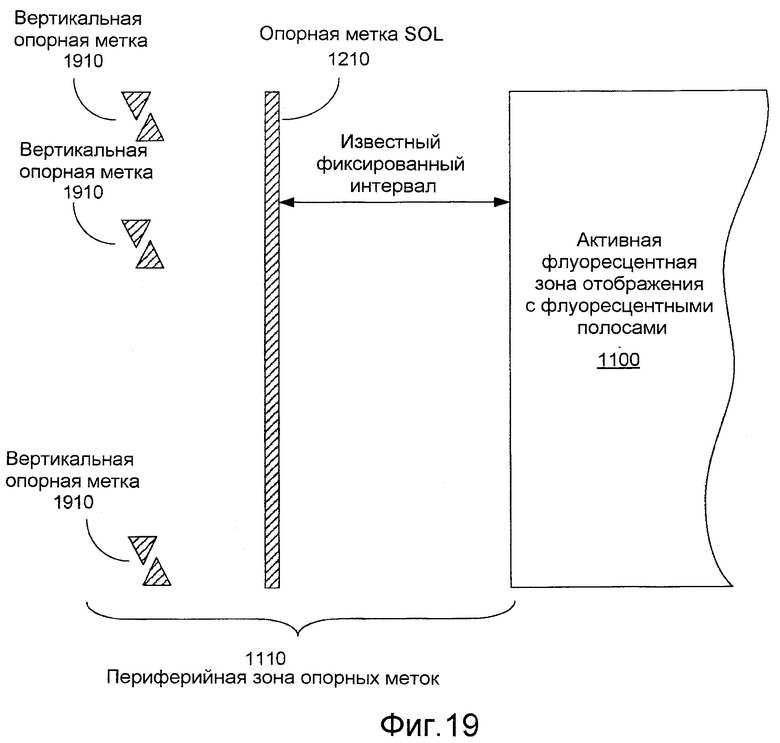
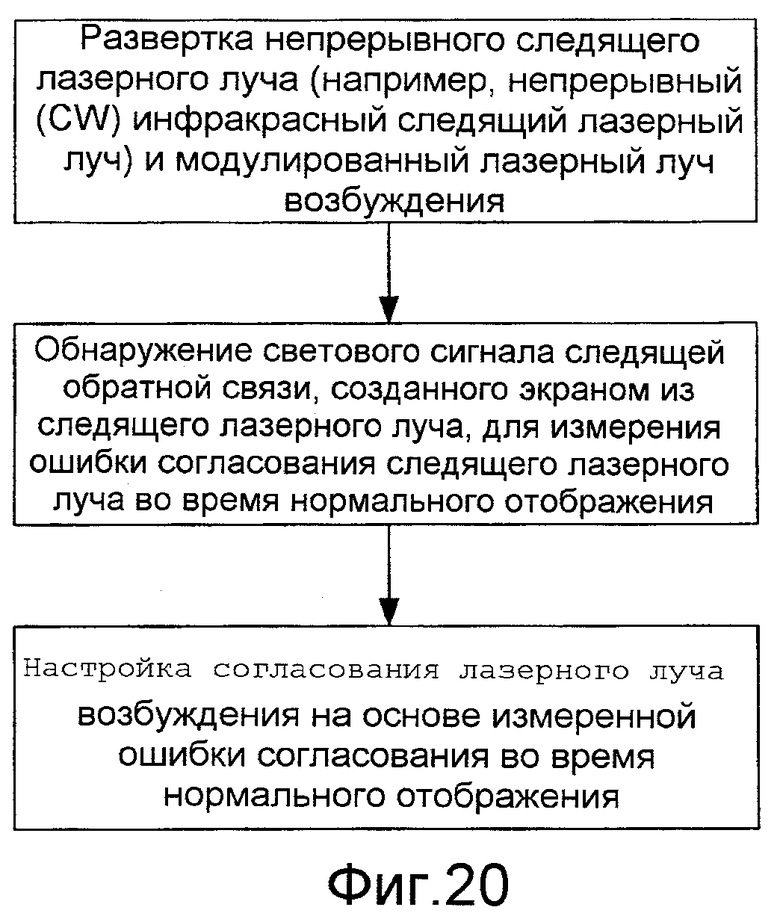
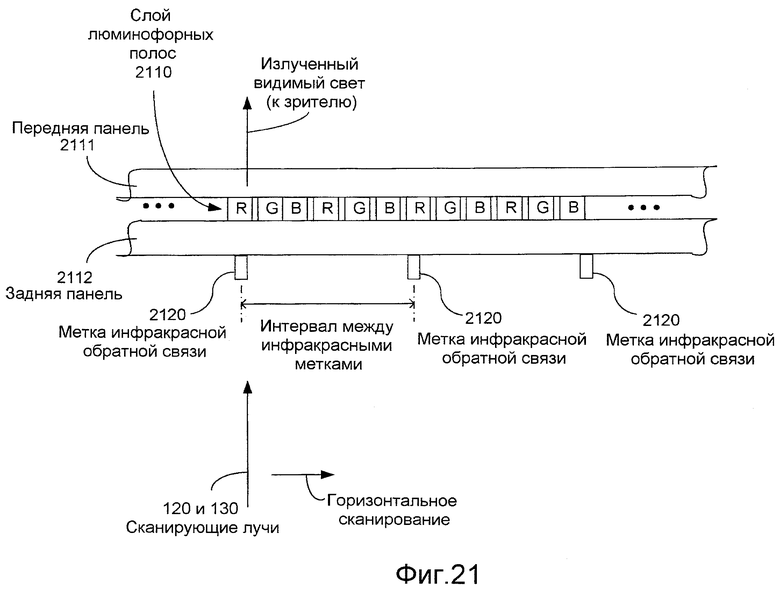


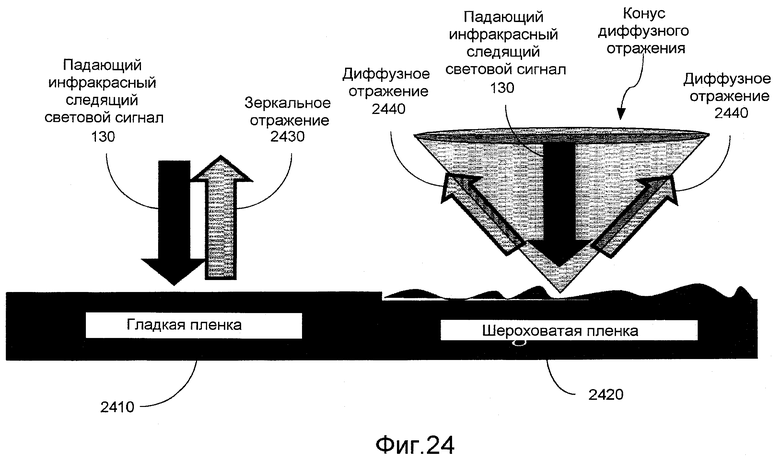
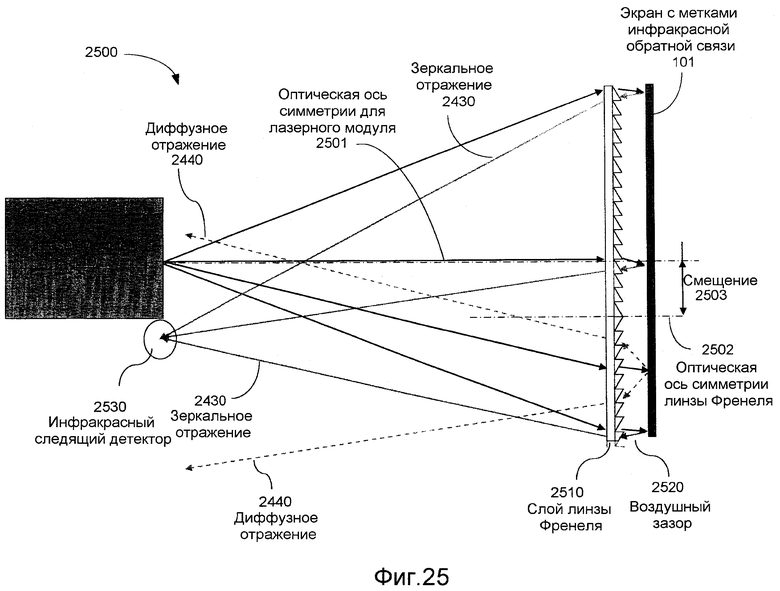
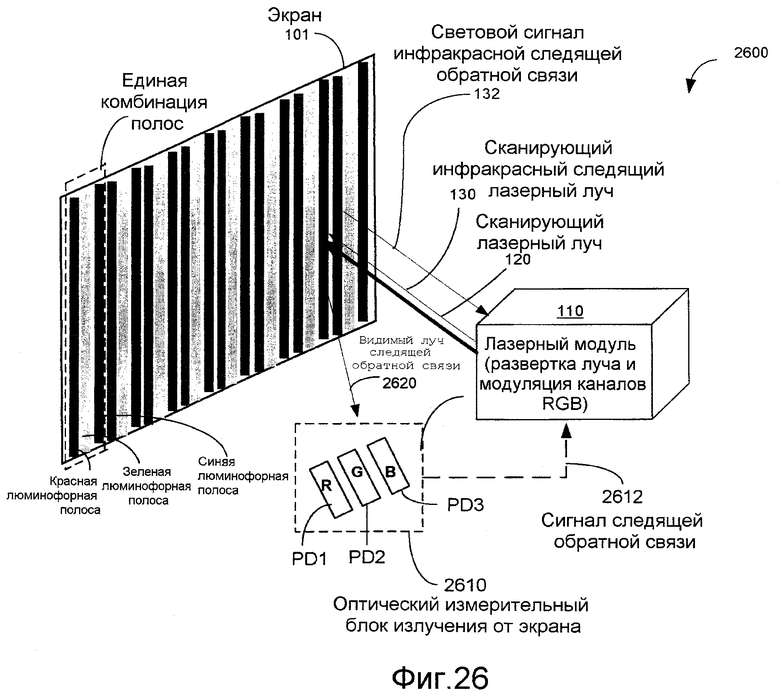
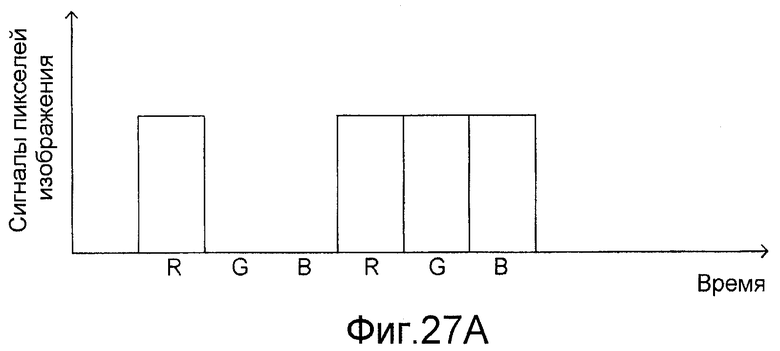
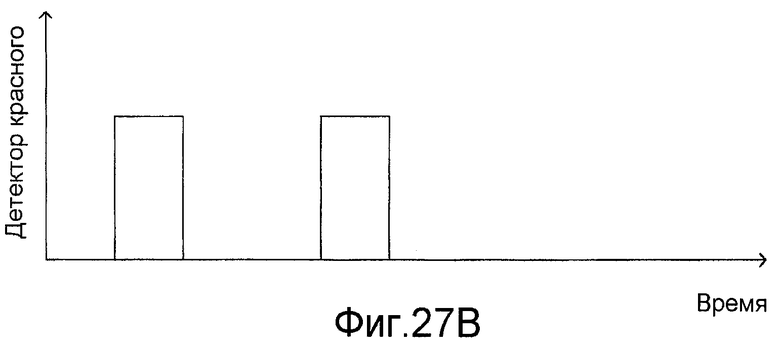
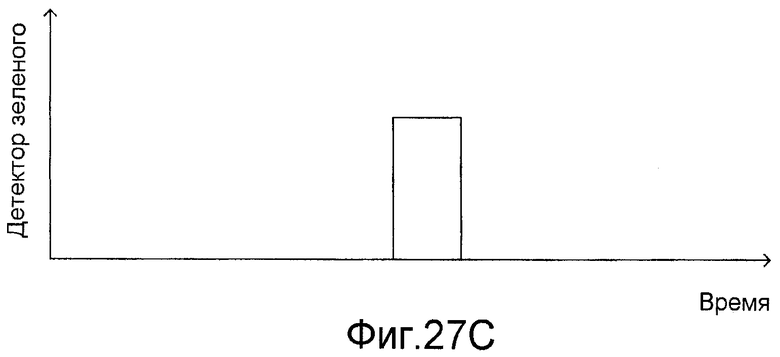

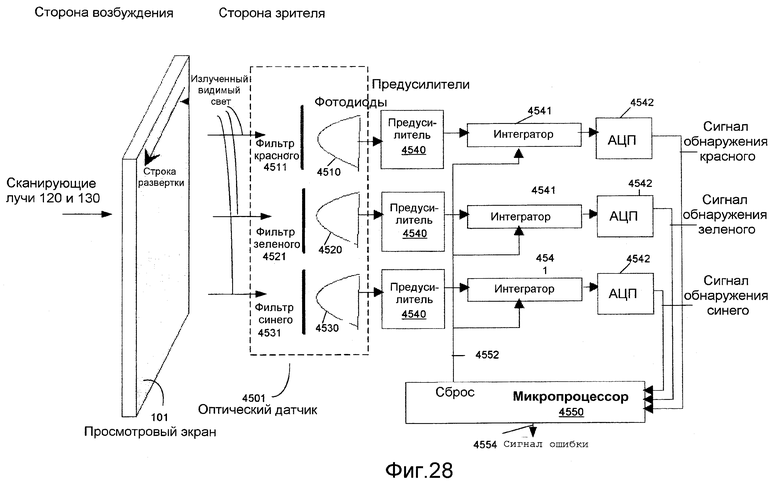
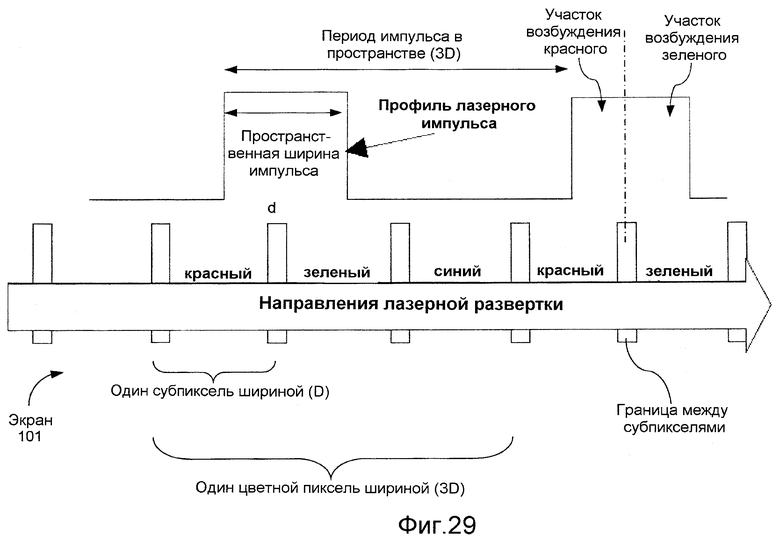
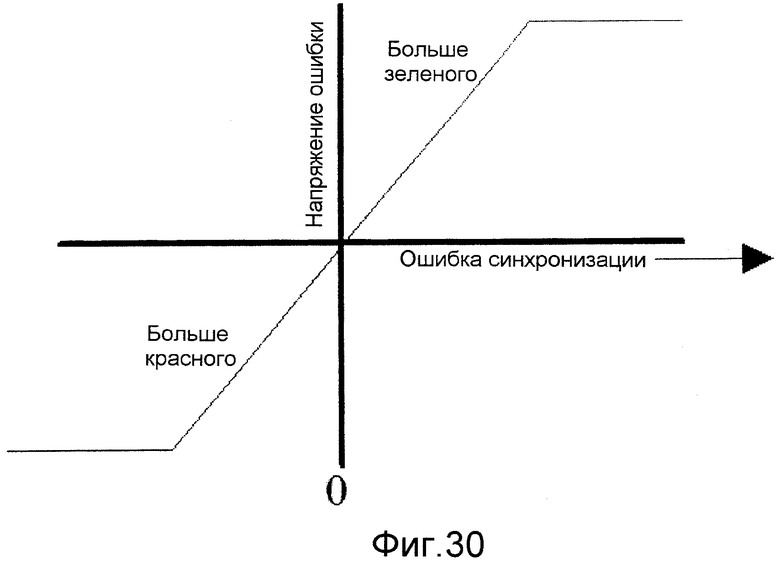
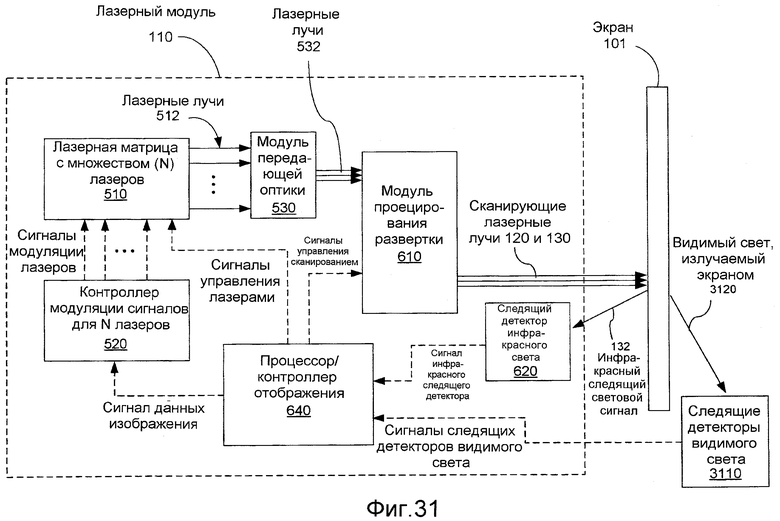
Изобретение относится к системам формирования изображения. Техническим результатом является управление пространственным согласованием пространственных положений оптических импульсов в луче возбуждения на экране. Результат достигается тем, что разворачивают один следящий луч и луч возбуждения по экрану, излучающему видимый свет при возбуждении его светом луча возбуждения, и обеспечивают управление оптическим согласованием луча возбуждения на основе положения следящего луча на экране посредством управления с обратной связью. 3 н. и 12 з.п. ф-лы, 38 ил.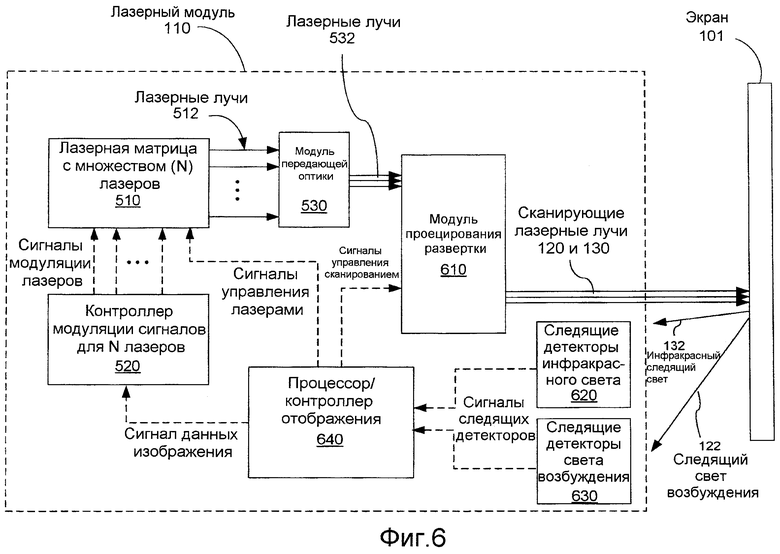
1. Система отображения со сканирующими лучами, содержащая:
источник света возбуждения для создания по меньшей мере одного луча возбуждения, имеющего оптические импульсы, которые несут информацию изображения;
источник следящего света для создания по меньшей мере одного следящего луча на длине волны следящего луча, являющейся невидимой;
модуль развертки луча для приема луча возбуждения и следящего луча и развертки луча возбуждения и следящего луча;
светоизлучающий экран, позиционированный для приема сканирующего луча возбуждения и следящего луча и содержащий светоизлучающую область, которая содержит: (1) параллельные светоизлучающие полосы, которые поглощают свет луча возбуждения, излучая видимый свет, для создания изображений, переносимых сканирующим лучом возбуждения; и (2) разделители полос, параллельные светоизлучающим полосам и пространственно чередующиеся с ними, причем каждый разделитель полос находится между двумя соседними полосами, где каждый разделитель полос является оптически отражающим;
оптический следящий датчик, позиционированный для приема света следящего луча, сканирующего экран, в том числе света, отраженного разделителями полос, и для создания контрольного сигнала, указывающего позиционирование следящего луча на экране; и
блок управления, способный, в соответствии с позиционированием следящего луча на экране в контрольном сигнале, осуществлять настройку синхронизации оптических импульсов, переносимых сканирующим лучом возбуждения, на основе взаимосвязи между следящим лучом и лучом возбуждения для управления пространственным согласованием пространственных положений оптических импульсов в луче возбуждения на экране.
2. Система по п.1, в которой длина волны следящего луча больше каждой длины волны в спектральном диапазоне видимого света, излучаемого светоизлучающими полосами.
3. Система по п.1, в которой следящий луч и луч возбуждения распространяются вместе по общей оптической траектории от модуля развертки луча до экрана.
4. Система по п.1, в которой:
экран содержит отражательную полосковую линию в качестве следящей опорной метки начала строки вне светоизлучающей области экрана, которая параллельна светоизлучающим полосам, для указания опорного положения следящего луча и опорного положения луча возбуждения во время начала развертки следящего луча или горизонтального луча перпендикулярно светоизлучающим полосам, и
блок управления способен на основе света следящего луча, полученного от следящей опорной метки начала строки и разделителей полос, управлять пространственным согласованием пространственных положений оптических импульсов в луче возбуждения на экране, когда луч возбуждения разворачивается в светоизлучающей области и создает изображения.
5. Система по п.4, в которой экран содержит следящую опорную метку вертикального положения луча вне светоизлучающей области на траектории развертки луча, перпендикулярной светоизлучающим полосам, причем следящая опорная метка вертикального положения луча, будучи облученной сканирующим лучом, создает световой сигнал следящей обратной связи по вертикальному положению луча, дающий информацию о вертикальном положении луча в вертикальном направлении, параллельном светоизлучающим полосам.
6. Система отображения со сканирующими лучами, содержащая:
световой модуль для направления и развертки по меньшей мере одного луча возбуждения, имеющего оптические импульсы, несущие информацию изображения, и по меньшей мере один следящий луч на длине волны, отличной от длины волны луча возбуждения;
экран, позиционированный для приема сканирующего луча возбуждения и следящего луча и содержащий светоизлучающий слой параллельных светоизлучающих полос, которые поглощают свет луча возбуждения и излучают видимый свет для создания изображений, переносимых сканирующим лучом возбуждения, причем экран сконфигурирован для отражения света следящего луча в направлении светового модуля для создания светового сигнала следящей обратной связи; и
оптический следящий измерительный модуль, позиционированный для приема светового сигнала следящей обратной связи и создания сигнала следящей обратной связи, указывающего позиционирование следящего луча на экране,
где световой модуль реагирует на позиционирование следящего луча на экране в сигнале следящей обратной связи для настройки синхронизации оптических импульсов, переносимых сканирующим лучом возбуждения, для управления пространственным согласованием пространственных положений оптических импульсов в луче возбуждения на экране.
7. Система по п.6, в которой:
экран содержит метки для следящей обратной связи, которые имеют грани, обращенные к источнику света возбуждения, которые зеркально отражают свет следящего луча, и области вне меток для следящей обратной связи, которые диффузно отражают свет следящего луча;
где система содержит линзу Френеля, расположенную между экраном и световым модулем, для направления сканирующего следящего луча и луча возбуждения, так чтобы они падали на экран фактически перпендикулярно, и
где линза Френеля имеет оптическую ось симметрично по центру линзы Френеля, так что она параллельна оптической оси светового модуля и сдвинута относительно нее для направления света следящего луча, который зеркально отражается меткой следящей обратной связи, на оптический следящий датчик, когда свет следящего луча, диффузно отраженного экраном вне метки следящей обратной связи, распределяется линзой Френеля по площади, превышающей оптический следящий датчик, для направления части диффузно отраженного света следящего луча на оптический следящий датчик.
8. Система по п.7, в которой:
метки следящей обратной связи являются параллельными полосами, которые параллельны параллельным светоизлучающим полосам на экране, и имеют грани, обращенные к источнику света возбуждения, которые зеркально отражают свет следящего луча.
9. Система по п.6, содержащая:
второй оптический следящий измерительный модуль, расположенный относительно экрана так, что он получает часть видимого света, излучаемого экраном, для создания второго сигнала следящей обратной связи, и
где блок управления способен калибровать позиционирование следящего луча на экране в сигнале следящей обратной связи в соответствии с информацией о позиционировании во втором сигнале следящей обратной связи.
10. Система по п.9, в которой второй оптический следящий измерительный модуль включает в себя множество оптических детекторов для соответствующего обнаружения видимого света разных цветов, излучаемых экраном.
11. Система по п.6, в которой следящий луч является инфракрасным лучом.
12. Способ управления системой отображения со сканирующими лучами, содержащий:
развертку на экране одного или более лучей возбуждения, модулированных оптическими импульсами для переноса изображений, для возбуждения параллельных светоизлучающих полос для излучения видимого света, который формирует изображения;
развертку на экране следящего луча на оптической длине волны, отличной от оптической длины волны одного или более лучей возбуждения;
обнаружение света следящего луча от экрана для получения следящего сигнала, указывающего позиционирование следящего луча на экране; и
в соответствии с позиционированием следящего луча на экране, управление одним или более сканирующими лучами возбуждения для управления пространственным согласованием пространственных положений оптических импульсов в каждом луче возбуждения на экране.
13. Способ по п.12, содержащий:
обнаружение части отраженного света одного или более лучей возбуждения от экрана для создания второго следящего сигнала, указывающего позиционирование луча возбуждения на экране; и
использование информации в следящем сигнале и втором следящем сигнале для управления пространственным согласованием пространственных положений оптических импульсов в каждом луче возбуждения на экране.
14. Способ по п.12, содержащий:
обнаружение части видимого света, излученного экраном для обеспечения второго следящего сигнала, указывающего позиционирование луча возбуждения на экране; и
использование информации в следящем сигнале и втором следящем сигнале для управления пространственным согласованием пространственных положений оптических импульсов в каждом луче возбуждения на экране.
15. Способ по п.12, содержащий:
обнаружение света, отраженного от опорной линейной метки на экране, которая отделена от параллельных светоизлучающих полос и параллельна им на экране, как точки отсчета начала строки для измерения положения луча относительно края параллельных светоизлучающих полос; и
использование положения, измеренного исходя из опорной линейной метки для управления синхронизацией оптических импульсов в каждом луче возбуждения при отображении изображений на экране.
| US 2006221021 A1, 2006.10.05 | |||
| RU 2000111003 A, 2002.03.10 | |||
| US 2007014318 A1, 2007.01.18 | |||
| US 2006082873 A1, 2006.04.20 | |||
| US 2005094266 A1, 2005.05.05. |

