Область техники, к которой относится изобретение
Настоящее раскрытие относится, в целом, к области связи и, в частности, к передаче пилот-сигнала в системе беспроводной связи.
Уровень техники
В системе беспроводной связи передатчик обычно обрабатывает (например, кодирует и отображает в символы) данные трафика для генерации символов данных, которые являются символами модуляции для данных. Для когерентной системы передатчик мультиплексирует символы пилот-сигнала с символами данных, обрабатывает мультиплексированные символы данных и пилот-сигнала для генерации модулированного сигнала, и передает этот сигнал по беспроводному каналу. Беспроводной канал искажает передаваемый сигнал из-за характеристики канала и дополнительно ухудшает сигнал из-за шума и помех.
Приемник принимает переданный сигнал и обрабатывает принятый сигнал для получения принятых символов данных и пилот-сигнала. Для когерентного детектирования данных приемник оценивает характеристику беспроводного канала на основании принятых символов пилот-сигнала и получает канальную оценку. Затем приемник осуществляет детектирование данных (например, коррекцию) на принятых символах данных с помощью канальной оценки для получения оценок символов данных, которые являются оценками символов данных, переданных передатчиком. Затем приемник обрабатывает (например, демодулирует и декодирует) оценки символов данных для получения декодированных данных.
Качество канальной оценки оказывает большое влияние на производительность детектирования данных и влияет на качество оценок символов данных, а также надежность декодированных данных. Обычно канальная оценка, получаемая приемником, тем лучше, чем больше пилот-сигналов передает передатчик. Однако увеличение количества пилот-сигналов увеличивает служебную нагрузку, что снижает эффективность системы.
Поэтому существует необходимость в эффективных методах передачи пилот-сигналов для достижения высокой производительности с одновременным снижением служебной нагрузки обработки пилот-сигнала.
Сущность изобретения
Здесь описаны методы передачи конфигурируемых пилот-сигналов в системе беспроводной связи. В одном аспекте размещение пилот-сигналов определяют на основании назначения ресурсов для передачи. Для разных назначений ресурсов используют разные размещения пилот-сигналов, которые могут соответствовать разным количествам кадров, разным количествам чередований H-ARQ, разным количествам поднесущих и т.д. Пилот-сигналы передают в положениях во временном и частотном измерениях, определяемых размещением пилот-сигналов. Каждый пилот-сигнал можно передавать на одной или нескольких поднесущих в одном или нескольких периодах символа.
Назначение ресурсов может предназначаться для одного или нескольких последовательных кадров. Затем размещение пилот-сигнала(ов) в каждом кадре можно определить на основании размещения пилот-сигнала(ов) в предыдущем(их) кадре(ах), если он существует. Назначение также может предназначаться для одного или нескольких чередований H-ARQ. Затем размещение пилот-сигнала(ов) в каждом чередовании H-ARQ можно определить на основании количества чередований H-ARQ в назначении, размещения пилот-сигнала(ов) в предыдущем(их) чередовании(ях) H-ARQ, если оно существует, и т.д. Размещение пилот-сигналов можно определить по одному или нескольким шаблонам пилот-сигнала. Для разных назначений ресурсов можно использовать разные шаблоны пилот-сигнала. По меньшей мере, один шаблон пилот-сигнала можно выбирать для использования на основании назначения ресурсов.
Пилот-сигналы могут представлять собой пилот-сигналы, мультиплексированные с временным разделением (TDM) и/или пилот-сигналы какого-либо другого типа. Пилот-сигналы можно передавать с использованием различных схем мультиплексирования, например IFDMA, LFDMA, EFDMA, OFDMA, и т.д. Пилот-сигналы и данные можно передавать с использованием одной и той же или разных схем мультиплексирования.
Различные аспекты и варианты осуществления изобретения дополнительно описаны ниже более подробно.
Краткое описание чертежей
Признаки и характер настоящего изобретения станут более понятны из подробного описания, приведенного ниже совместно с чертежами, снабженными сквозной системой обозначений.
Фиг.1 - блок-схема передатчика и приемника.
Фиг.2A - передача H-ARQ.
Фиг.2B - множественные чередования H-ARQ.
Фиг.3A, 3B и 3C - три иллюстративные структуры поднесущих.
Фиг.4A - иллюстративный шаблон пилот-сигнала для одного чередования H-ARQ.
Фиг.4B - использование шаблона пилот-сигнала на фиг.4A для двух чередований H-ARQ.
Фиг.5A - 2-кадровый шаблон пилот-сигнала для двух чередований H-ARQ.
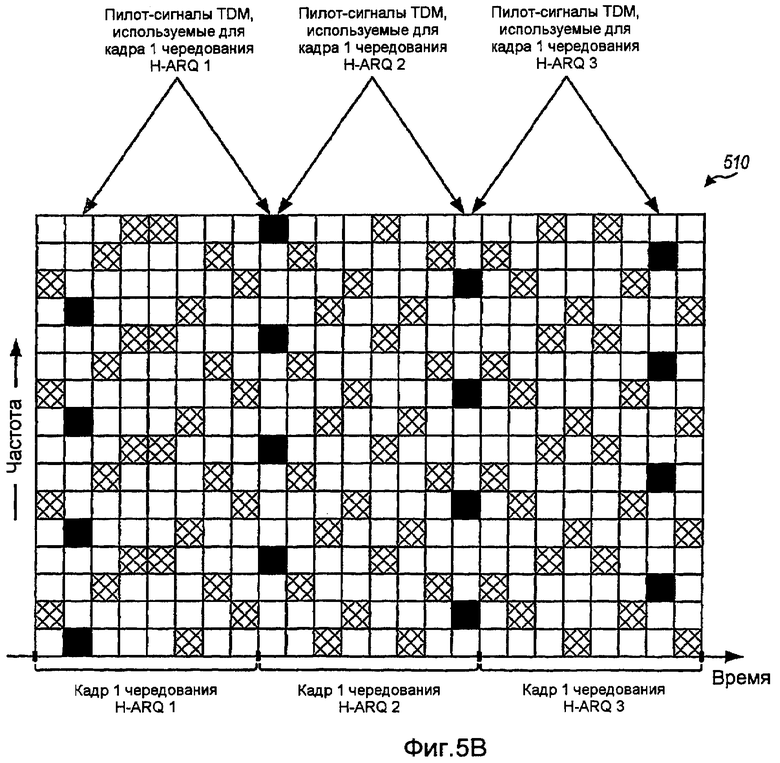
Фиг.5B - 3-кадровый шаблон пилот-сигнала для трех чередований H-ARQ.
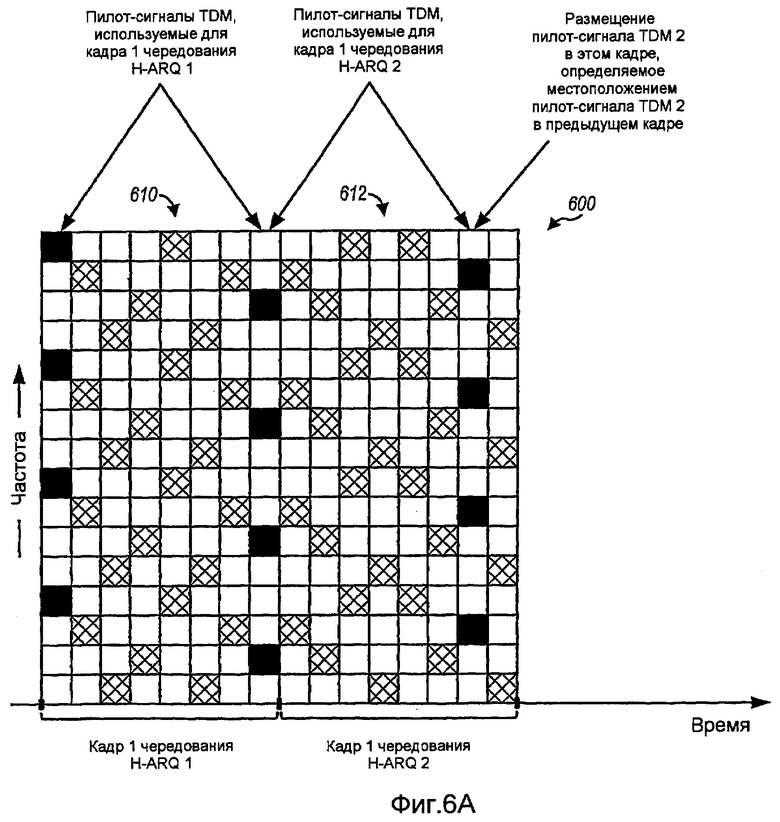
Фиг.6A - динамические пилот-сигналы для импульса передачи двух кадров.
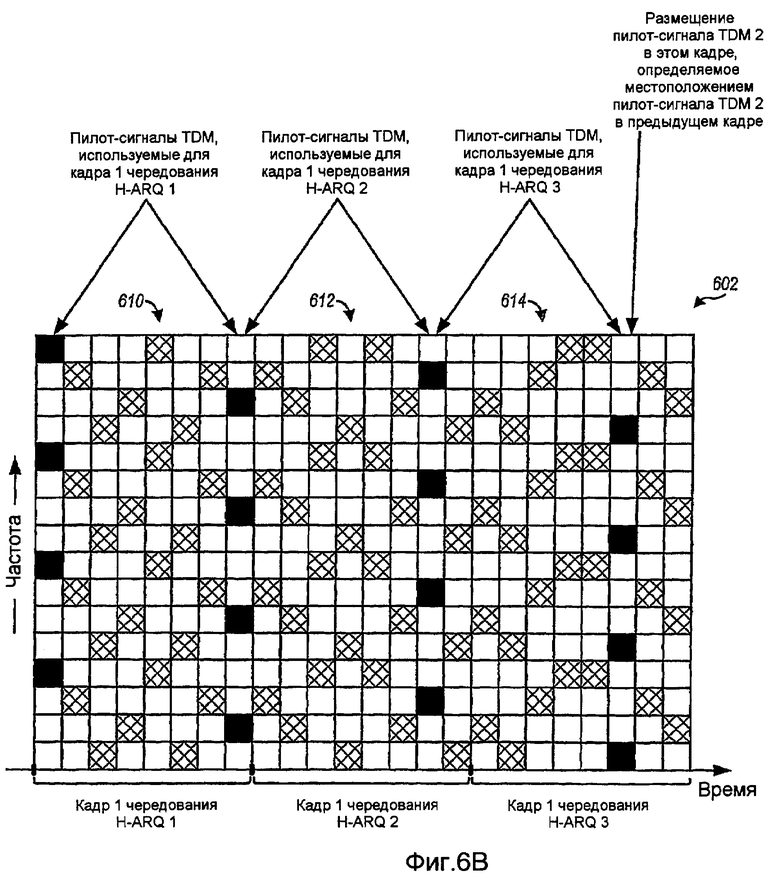
Фиг.6B - динамические пилот-сигналы для импульса передачи трех кадров.
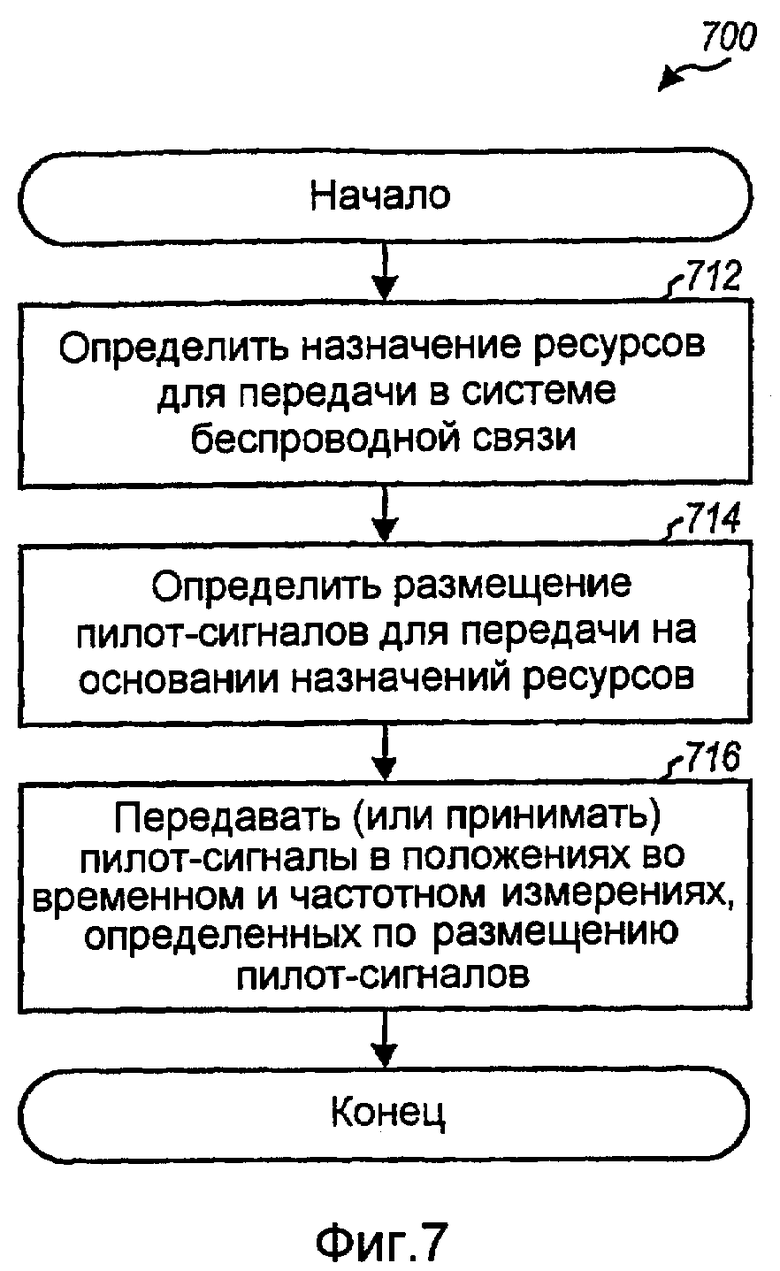
Фиг.7 - процесс передачи или приема конфигурируемых пилот-сигналов.
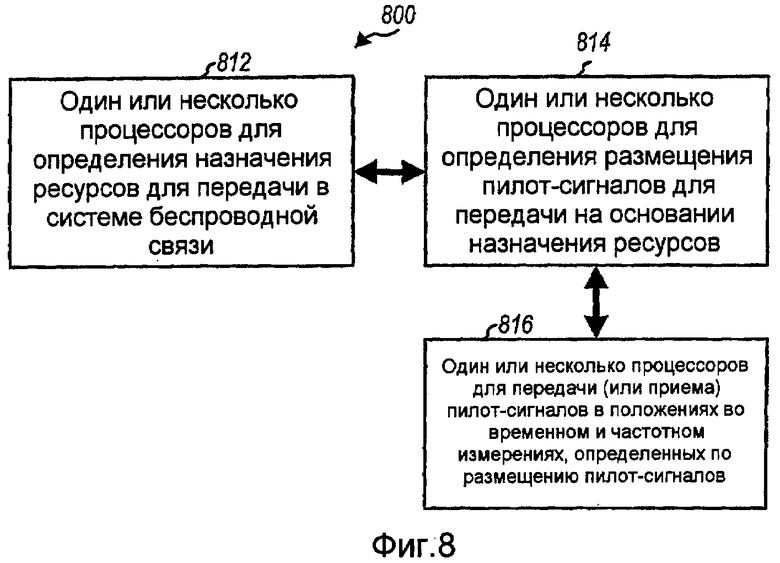
Фиг.8 - устройство, поддерживающее конфигурируемые пилот-сигналы.
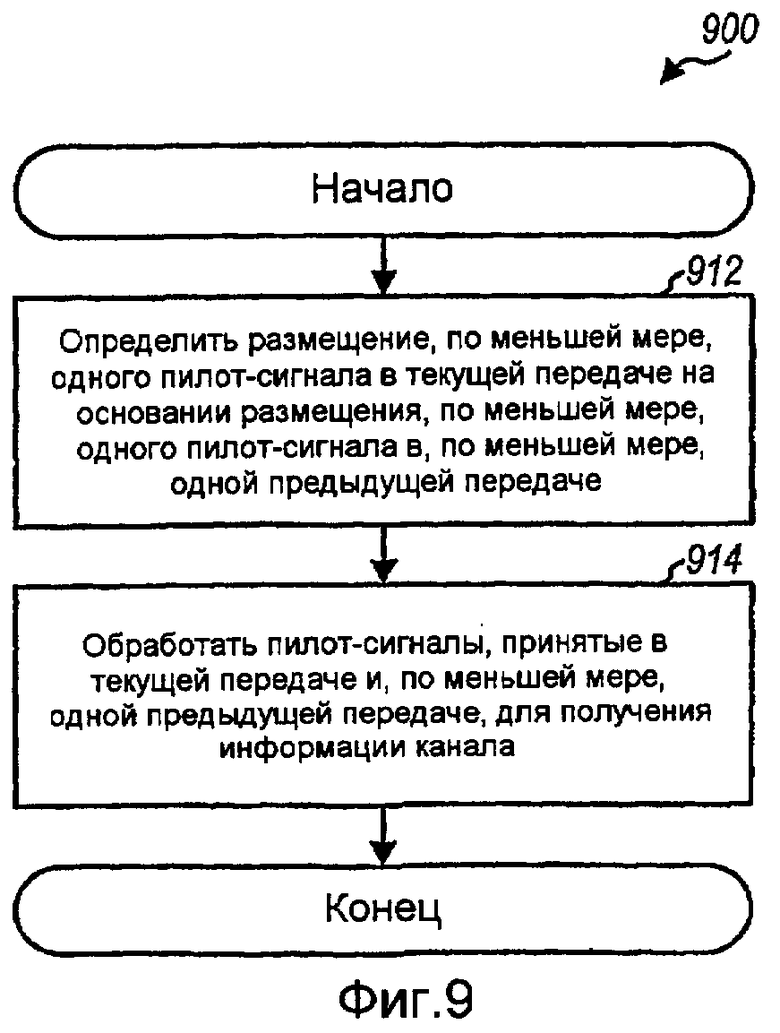
Фиг.9 - процесс приема конфигурируемых пилот-сигналов.
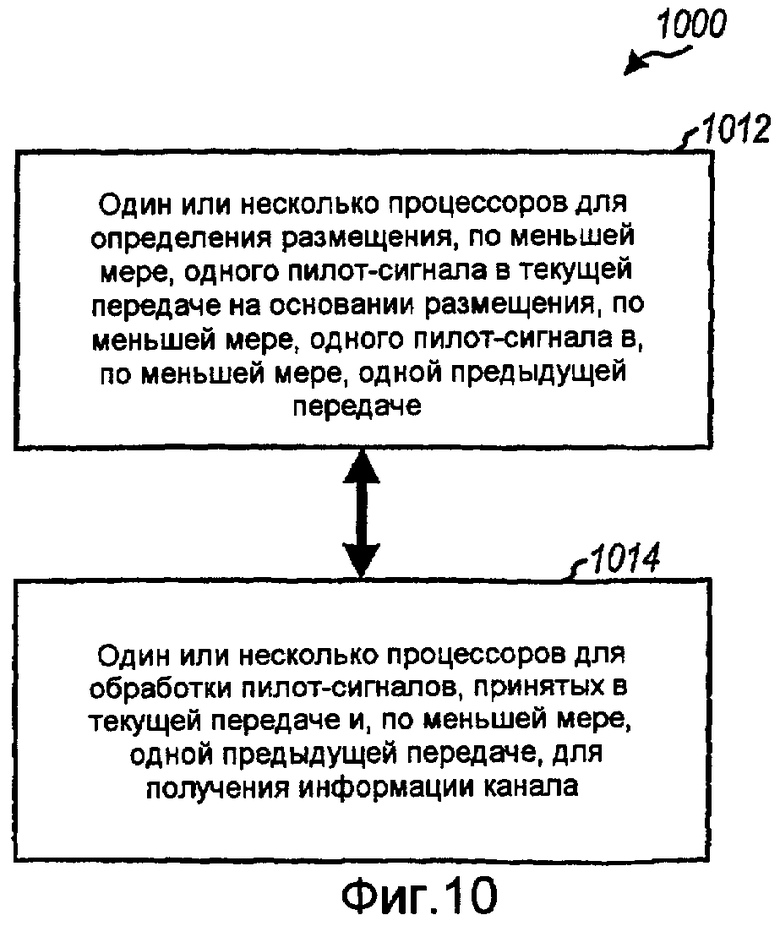
Фиг.10 - устройство приема конфигурируемых пилот-сигналов.
Подробное описание
Слово "иллюстративный" используется здесь в смысле "служащий примером, вариантом или иллюстрацией". Любой вариант осуществления или конструкция, описанный здесь как "иллюстративный", не обязательно рассматривать как предпочтительный или преимущественный по отношению к другим вариантам осуществления или конструкциям.
На фиг.1 показана блок-схема передатчика 110 и приемника 150 в системе беспроводной связи 100. Для прямой линии связи (или нисходящей линии связи), передатчик 110 может составлять часть базовой станции, и приемник 150 может составлять часть терминала. Для обратной линии связи (или восходящей линии связи), передатчик 110 может составлять часть терминала, и приемник 150 может составлять часть базовой станции. Базовая станция это станция, которая осуществляет связь с терминалами. Базовую станцию также можно именовать базовой приемопередающей системой (BTS), точкой доступа, узлом B или каким-либо другим сетевым объектом, и она может содержать некоторые или все их функциональные возможности. Терминал может быть стационарным или мобильным, и его также можно именовать терминалом доступа (AT), мобильной станцией (MS), пользовательским оборудованием (UE), и/или каким-либо другим объектом, и он может содержать некоторые или все их функциональные возможности. Терминал может быть беспроводным устройством, сотовым телефоном, карманными персональным компьютером (КПК), беспроводным модемом, карманным устройством и т.д.
В передатчике 110 процессор 120 передаваемых (TX) данных и пилот-сигнала обрабатывает (например, кодирует, перемежает и отображает в символы) данные трафика и сигнализацию и генерирует символы данных. Процессор 120 также генерирует символы пилот-сигнала и мультиплексирует символы данных и символы пилот-сигнала. В целом, символ данных является символом модуляции для данных, символ пилот-сигнала является символом модуляции для пилот-сигнала, причем символ модуляции является комплексным значением точки векторной диаграммы сигнала (например, для PSK или QAM), и символ является комплексным значением. Пилот-сигнал представляет собой данные/передачу, заранее известные/ую передатчику и приемнику. Модулятор 130 осуществляет модуляцию символов данных и пилот-сигнала согласно одной или нескольких схем мультиплексирования/технологий радиосвязи и генерирует выходные чипы. Передатчик (TMTR) 132 обрабатывает (например, преобразует к аналоговому виду, усиливает, фильтрует и преобразует с повышением частоты) выходные элементарные сигналы (чипы) и генерирует модулированный сигнал радиочастоты (РЧ), который передается через антенну 134.
В приемнике 150 антенна 152 принимает РЧ модулированный сигнал от передатчика 110 и подает принятый сигнал в приемник (RCVR) 154. Приемник 154 обрабатывает (например, фильтрует, усиливает, преобразует с понижением частоты и цифрует) принятый сигнал и обеспечивает выборки. Демодулятор 160 осуществляет демодуляцию выборок и получает принятые символы данных и принятые символы пилот-сигнала. Блок оценки/обработки 162 канала может выводить различные типы информации канала (например, канальную оценку, оценку качества принятого сигнала, оценку помехи и т.д.) на основании принятых символов пилот-сигнала. Затем демодулятор 160 осуществляет детектирование данных (например, коррекцию или согласованную фильтрацию) на принятых символах данных с помощью информации канала и выдает оценки символов данных. Процессор 170 принимаемых (Rx) данных обрабатывает (например, осуществляет обратное отображение символов, снимает перемежение и декодирует) оценки символов данных и выдает декодированные данные. В целом, обработка в приемнике 150 комплементарна обработке в передатчике 110.
Контроллеры/процессоры 140 и 180 направляют работу различных устройств обработки в передатчике 110 и приемнике 150 соответственно. В блоках памяти 142 и 182 хранятся программные коды и данные для передатчика 110 и приемника 150 соответственно.
Система 100 может использовать схему передач гибридного автоматического запроса повторения (H-ARQ). В режиме H-ARQ передатчик отправляет одну или несколько передач для пакета данных, пока пакет не будет правильно декодирован приемником или пока не будет отправлено максимальное количество передач. H-ARQ повышает надежность передачи данных и поддерживает автоматическую регулировку скорости передачи данных для пакетов при наличии изменений в канальных условиях.
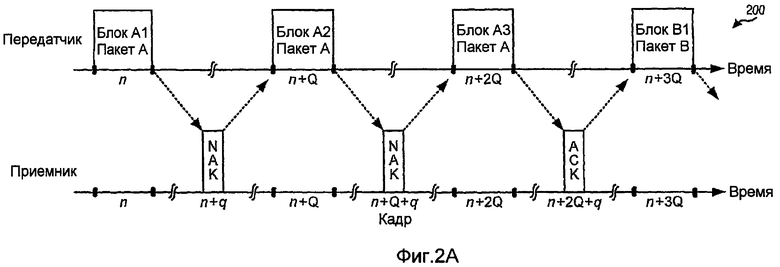
На Фиг.2A показана передача H-ARQ. Передатчик обрабатывает (например, кодирует и модулирует) пакет данных (пакет A) и генерирует множественные (D) блоки данных. Пакет данных также можно именовать кодовым словом и т.д. Блок данных также можно именовать подпакетом, передачей H-ARQ и т.д. Каждый блок данных для пакета может содержать достаточно информации, чтобы приемник мог правильно декодировать пакет при благоприятных канальных условиях. D блоков данных обычно содержат разную информацию избыточности для пакета. Каждый блок данных можно передавать в кадре, который может иметь любую длительность во времени. D блоков данных передаются по одному, пока пакет не закончится, и блочные передачи отделены друг от друга Q кадрами, где Q>1.
Передатчик передает первый блок данных (блок A1) для пакета A в кадре n. Приемник принимает и обрабатывает (например, демодулирует и декодирует) блок A1, определяет, что пакет A декодирован с ошибкой, и направляет отрицательную квитанцию (NAK) передатчику в кадре n+q, где q - задержка обратной связи, и 1≤q<Q. Передатчик принимает NAK и передает второй блок данных (блок A2) для пакета A в кадре n+Q. Приемник принимает блок A2, обрабатывает блоки A1 и A2, определяет, что пакет A декодирован с ошибкой, и направляет NAK в кадре n+Q+q. Блочная передача и ответ NAK могут продолжаться до D раз. В примере, показанном на фиг.2A, передатчик передает третий блок данных (блок A3) для пакета A в кадре n+2Q. Приемник принимает блок A3, обрабатывает блоки A1-A3, определяет, что пакет A декодирован правильно, и направляет положительную квитанцию (ACK) в кадре n+2Q+q. Передатчик принимает ACK и заканчивает передачу пакета A. Затем передатчик обрабатывает следующий пакет данных (пакет B) и передает блоки данных для пакета B аналогичным образом.
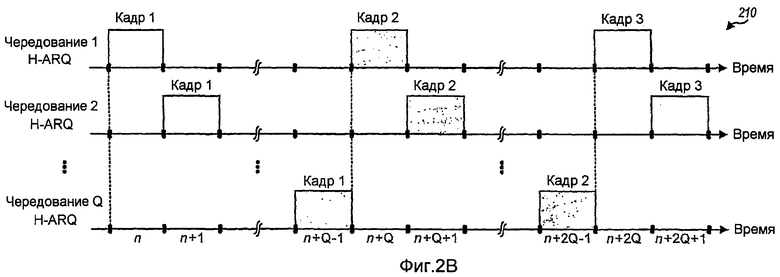
Согласно фиг.2A новый блок данных передается каждые Q кадров. Для повышения эффективности использования канала передатчик может передавать до Q пакетов в режиме чередования.
На фиг.2B показан вариант осуществления множественных (Q) чередований H-ARQ. В этом варианте осуществления чередование H-ARQ 1 включает в себя кадры n, n+Q, и т.д., чередование H-ARQ 2 включает в себя кадры n+1, n+Q+1 и т.д., и чередование H-ARQ Q включает в себя кадры n+Q-1, n+2Q-1 и т.д. Q чередований H-ARQ смещены относительно друг друга на один кадр. Например, если Q=2, то чередование H-ARQ 1 может включать в себя нечетные кадры, и чередование H-ARQ 2 может включать в себя четные кадры. В целом, задержку повторной передачи Q H-ARQ и задержку обратной связи q обычно выбирают для обеспечения достаточного времени обработки для передатчика и приемника. Передатчик может передавать до Q пакетов на Q чередованиях H-ARQ.
Система 100 может использовать различные схемы мультиплексирования/технологии радиосвязи, например технологии множественного доступа с частотным разделением по одной несущей (SC-FDMA), множественного доступа с ортогональным частотным разделением (OFDMA), множественного доступа с кодовым разделением (CDMA), множественного доступа с временным разделением (TDMA), множественного доступа с частотным разделением (FDMA) и т.д. SC-FDMA включает в себя FDMA с перемежением (IFDMA), FDMA с локализацией (LFDMA) и расширенную FDMA (EFDMA). IFDMA также именуется распределенной FDMA, и LFDMA также именуется узкополосной FDMA или классической FDMA. Данные и пилот-сигнал можно передавать на (1) поднесущих, равномерно распределенных по полосе пропускания системы, посредством IFDMA, (2) группе соседних поднесущих посредством LFDMA, или (3) нескольких группах соседних поднесущих посредством EFDMA. OFDMA использует схему мультиплексирования с ортогональным частотным разделением (OFDM). В целом, символы модуляции передаются во временном измерении посредством SC-FDMA и в частотном измерении посредством OFDMA. Основным недостатком OFDMA является высокое отношение пиковой мощности к средней мощности (PAPR), в том смысле, что отношение пиковой мощности к средней мощности сигнала OFDM может быть высоким. PAPR сигнала SC-FDMA определяется точками сигнала на векторной диаграмме сигнала, выбранного для использования (например, PSK или QAM), и ниже, чем PAPR сигнала OFDM.
Система 100 может использовать одну или несколько схем мультиплексирования для прямой и обратной линий связи. Например, система 100 может использовать (1) SC-FDMA для прямой и обратной линий связи, (2) одну версию SC-FDMA (например, LFDMA) для одной линии связи и другую версию SC-FDMA (например, IFDMA) для другой линии связи, (3) OFDMA для прямой и обратной линий связи, (4) SC-FDMA для одной линии связи (например, обратной линии связи) и OFDMA для другой линии связи (например, прямой линии связи), или (5) какую-либо другую комбинацию схем мультиплексирования. Может быть желательно использовать SC-FDMA (например, IFDMA) на обратной линии связи для достижения более низкого PAPR и использовать OFDMA на прямой линии связи для обеспечения возможности увеличения емкости системы.
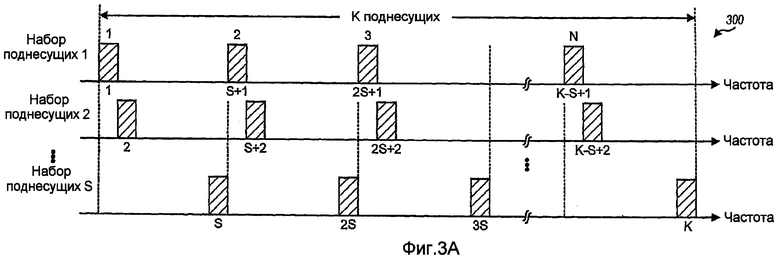
На фиг.3A показана структура 300 поднесущих, которую можно использовать для IFDMA и OEDMA. Полоса пропускания системы BW МГц делится на множественные (K) ортогональные поднесущие, которые заданы индексами от 1 до K, где K может быть любым целым числом, но обычно является степенью двойки. Поднесущие также можно именовать тонами, бинами и т.д. Разнесение между соседними поднесущими равно BW/K МГц. Для простоты, в нижеследующем описании предполагается, что все K поднесущие можно использовать для передачи. Для структуры 300 поднесущих, совокупность K поднесущих организована в виде S неперекрывающихся наборов, причем каждый набор содержит N поднесущих, которые равномерно распределены по совокупности K поднесущих, где K=S·N. Последовательные поднесущие в каждом наборе отделены друг от друга S поднесущими. Таким образом, набор s содержит поднесущие s, S+s, 2S+s,…, (N-1)×S+s, для s∈{1,…, S}.
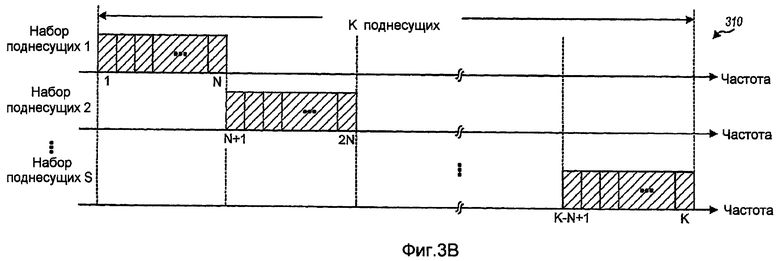
На фиг.3B показана структура 310 поднесущих, которую можно использовать для LFDMA и OFDMA. Для структуры 310 поднесущих совокупность K поднесущих организована в виде S неперекрывающихся наборов, причем каждый набор содержит N последовательных поднесущих, где K=S×N. Таким образом, набор s содержит поднесущие от (s-1)×N+1 до s×N, для s∈{1,…, S}.
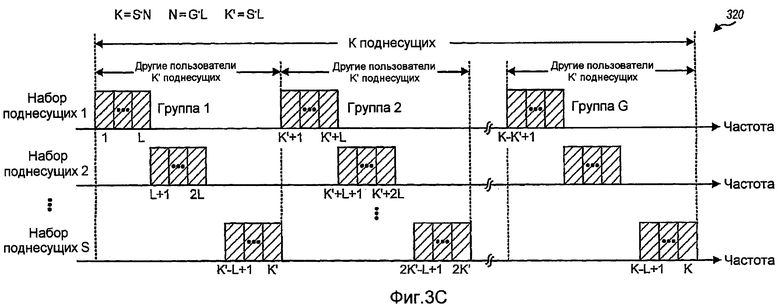
На фиг.3C показана структура 320 поднесущих, которую можно использовать для EFDMA и OFDMA. Для структуры 320 поднесущих, совокупность K поднесущих организована в виде S неперекрывающихся наборов, причем каждый набор содержит N поднесущих, которые организованы в G групп из L последовательных поднесущих, где K=S×N и N=G×L. Совокупность K поднесущих может распределяться по S наборам следующим образом. Совокупность K поднесущих сначала разбивается на множественные частотные диапазоны, причем каждый частотный диапазон содержит K′=S×L последовательных поднесущих. Каждый частотный диапазон дополнительно разбивается на S групп, причем каждая группа включает в себя L соседних поднесущих. Для каждого частотного диапазона первая группа из L поднесущих выделяется набору 1, следующая группа из L поднесущих выделяется набору 2 и т.д., и последняя группа из L поднесущих выделяется набору S. Набор s, для s∈{1,…, S}, содержит поднесущие, чьи индексы k удовлетворяют условию: (s-1)×L<(k mod K′)≤s×L.
В целом структура поднесущих может включать в себя любое количество наборов, и каждый набор может содержать любое количество поднесущих. Наборы могут содержать одинаковые или разные количества поднесущих, и количество поднесущих в каждом наборе может быть или не быть целочисленным делителем K. Поднесущие в каждом наборе могут быть организованы любым образом, например распределяться равномерно или неравномерно по полосе пропускания системы. Символы модуляции можно передавать на одном или нескольких наборах поднесущих либо во временном измерении посредством SC-FDMA, либо в частотном измерении посредством OFDMA.
Символ SC-FDMA можно генерировать для одного набора поднесущих в одном периоде символа следующим образом. N символов модуляции, подлежащие передаче на N поднесущих, преобразуются к частотному измерению с помощью N-точечного быстрого преобразования Фурье (БПФ) для получения N значений в частотном измерении. Эти N значений в частотном измерении отображаются на N поднесущих, используемых для передачи, и нулевые значения отображаются в остальные K-N поднесущих. Затем осуществляется K-точечное обратное БПФ (ОБПФ) на K значениях в частотном измерении и нулевых значениях для получения последовательности из K выборок во временном измерении. Последние C выборок последовательности копируются в начало последовательности для формирования символа SC-FDMA, который содержит K+C выборок. C скопированных выборок часто именуются циклическим префиксом или защитным интервалом, и C называется длиной циклического префикса. Циклический префикс используется для борьбы с межсимвольной помехой (ISI), обусловленной частотно-избирательным замиранием.
Символ OFDM можно генерировать в течение одного периода символа следующим образом. Символы модуляции отображаются на поднесущие, используемые для передачи, и нулевые символы с нулевым значением сигнала отображаются на оставшиеся поднесущие. Затем K-точечное ОБПФ осуществляется на K символах модуляции и нулевых символах для получения последовательности из K выборок во временном измерении. Последние C выборок последовательности копируются в начало последовательности для формирования символа OFDM, который содержит K+C выборок.
Символ передачи может быть символом OFDM или символом SC-FDMA. Символ SC-FDMA может представлять собой символ IFDMA, символ LFDMA или символ EFDMA. K+C выборок символа передачи передаются в K+C периодах выборки. Период символа - это длительность передачи одного символа, и он равен K+C периодов выборки.
Описанные здесь методы передачи пилот-сигнала можно использовать для прямой и обратной линий связи. Эти методы также можно использовать для различных схем мультиплексирования, например SC-FDMA и OFDMA. Для простоты некоторые аспекты и варианты осуществления методов описаны применительно к IFDMA.
Для передачи на одном чередовании H-ARQ можно назначить один набор из N поднесущих. Если каждый кадр занимает T периодов символа, то в каждом кадре назначенного чередования H-ARQ доступно N·T единиц передачи, где единицей передачи является одна поднесущая в одном периоде символа. В каждом кадре чередования H-ARQ можно передавать всего N·T символов. В OPDMA для передачи пилот-сигнала можно использовать любые P единиц передачи из всех N·T единиц передачи, и на этих P единицах передачи можно передавать P символов пилот-сигнала. В SC-FDMA пилот-сигналы можно передавать в режиме TDM для поддержания низкого PAPR. В этом случае, в каждом периоде символа, N символов пилот-сигнала можно передавать на N поднесущих, используемых для передачи пилот-сигнала. Альтернативно, символы пилот-сигнала можно передавать на некоторых поднесущих, и символы данных можно передавать на оставшихся поднесущих в данном периоде символа. Это мультиплексирование пилот-сигнала и данных в одном и том же периоде символа приводит к повышению PAPR.
В целом, желательно передавать достаточное количество пилот-сигналов, чтобы приемник мог выводить достаточно хорошую канальную оценку. Пилот-сигналы должны распределяться по частоте и времени для регистрации изменений на канале по частоте и во времени. Для SC-FDMA и OFDMA увеличение количества символов пилот-сигнала может повышать производительность оценивания канала. Однако из-за этого сокращается количество единиц передачи, доступных для передачи данных. В этом случае может снижаться либо битовая скорость передачи информации, либо эффективность кодирования кода коррекции ошибок, что может приводить к уменьшению зоны покрытия и/или увеличению вероятности ошибок декодирования. Поскольку пилот-сигналы сопряжены со служебной нагрузкой, желательно минимизировать количество пилот-сигналов, но при этом добиваться поставленных целей.
Для простоты в нижеследующем описание используется следующий вариант осуществления. Система имеет всего K=16 поднесущих, которые организованы в S=4 наборов поднесущих. Каждый набор поднесущих включает в себя N=4 поднесущих, которые равномерно распределены по всем 16 поднесущим. Система также имеет Q≥3 чередований H-ARQ. Каждый кадр занимает T=8 периодов символа, и символ передачи (например, символ IFDMA или символ OFDM) можно передавать в каждый период символа. Система использует скачкообразную перестройку частоты следования символов, благодаря чему для передачи в каждом периоде символа можно использовать отдельный набор поднесущих. Конкретный набор поднесущих, подлежащий использованию, в каждый период символа, можно определить по шаблону скачкообразной перестройки частоты, который известен как передатчику, так и приемнику. Скачкообразная перестройка частоты может повышать частотное разнесение.
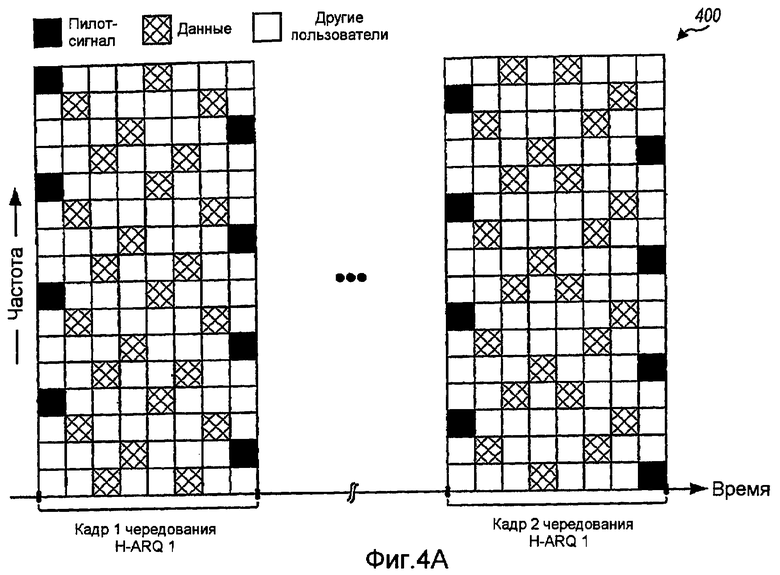
На фиг.4A показан вариант осуществления шаблона 400 пилот-сигнала, который можно использовать для передачи на одном наборе поднесущих в одном чередовании H-ARQ. Для шаблона 400 пилот-сигнала пилот-сигналы TDM передаются в первом и последнем периодах символа каждого кадра в назначенном чередовании H-ARQ. Каждый пилот-сигнал TDM состоит из символов пилот-сигнала, которые передаются на всех назначенных поднесущих в периоде символа. Пилот-сигналы TDM поддерживают низкое PAPR для передачи, совершаемой с использованием SC-FDMA. Передача каждого пилот-сигнала TDM по всем K поднесущим позволяет приемнику регистрировать частотные изменения на канале и оценивать характеристику канала по полосе пропускания системы. Передача пилот-сигналов TDM в первом и последнем периодах символа позволяет приемнику регистрировать изменения во времени на канале. В целом, пилот-сигналы TDM должны быть (1) достаточно разнесены друг от друга для регистрации изменений канала во времени, но (2) не должны быть разнесены слишком сильно, чтобы можно было обеспечить достаточно "представительную" характеристику канала. Размещение пилот-сигнала, показанное на фиг.4A, может быть полезно для быстро изменяющегося канала, например канал с сильным доплеровским эффектом вследствие движения автомобиля. Если пилот-сигналы TDM используются согласно фиг.4A, то варианты конструкции могут ограничиваться количеством пилот-сигналов TDM, подлежащих передаче, и местоположениями этих пилот-сигналов TDM на временной оси.
В целом, шаблон пилот-сигнала может включать в себя любое количество пилот-сигналов, которые можно передавать в любых единицах передачи в кадре. Разные шаблоны пилот-сигнала можно оценивать, причем каждый шаблон пилот-сигнала имеет отдельное размещение пилот-сигналов в кадре. Шаблон пилот-сигнала, который обеспечивает наивысшую производительность, можно выбирать для использования.
Шаблон 400 пилот-сигнала может обеспечивать высокую производительность, когда передача осуществляется периодически, например, через каждые Q кадров на назначенном чередовании H-ARQ, как показано на фиг.4A. Поскольку кадры назначенного чередования H-ARQ разнесены по времени, изменения во времени на канале могут приводить к тому, что наблюдения пилот-сигнала в одном кадре оказываются неактуальными или устаревшими для другого кадра. Таким образом, каждый кадр должен включать в себя достаточное количество пилот-сигналов, чтобы приемник мог выводить хорошую канальную оценку для этого кадра.
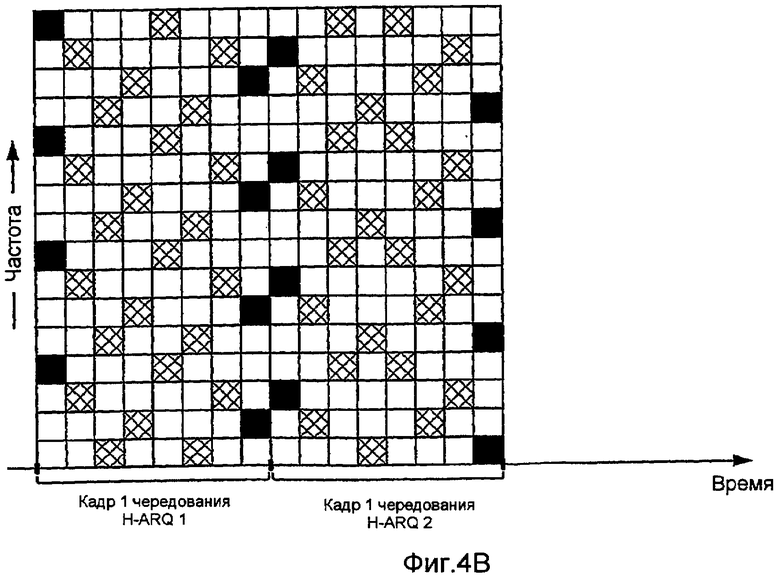
На фиг.4B показано использование шаблона 400 пилот-сигнала для передачи на двух последовательных чередованиях H-ARQ. В этом примере назначены чередования H-ARQ 1 и 2, и пилот-сигналы TDM передаются в первом и последнем периодах символов каждого кадра в каждом назначенном чередовании H-ARQ. Согласно фиг.4B пилот-сигнал TDM, переданный в последний период символов кадра 1 чередования H-ARQ 1, располагается непосредственно справа от пилот-сигнала TDM, переданного в первый период символов кадра 1 чередования H-ARQ 2. Эти пилот-сигналы TDM являются, по существу, избыточными, и сопряжены с неэффективным использованием системных ресурсов. Согласно фиг.4A и 4B шаблон пилот-сигнала 400 может быть пригоден для передачи на одном чередовании H-ARQ, но не эффективен для передачи на нескольких последовательных чередованиях H-ARQ.
Согласно одному аспекту количество пилот-сигналов и размещение пилот-сигналов определяются назначением ресурсов для передачи. Согласно варианту осуществления разные шаблоны пилот-сигнала используются для разных назначений ресурсов, которые могут соответствовать разным количествам кадров, разным количествам чередований H-ARQ, разным количествам поднесущих и т.д. Один или несколько шаблонов пилот-сигнала можно использовать для каждого отдельного назначения ресурсов и могут предназначаться для обеспечения высокой производительности с одновременным снижением служебной нагрузки обработки пилот-сигнала.
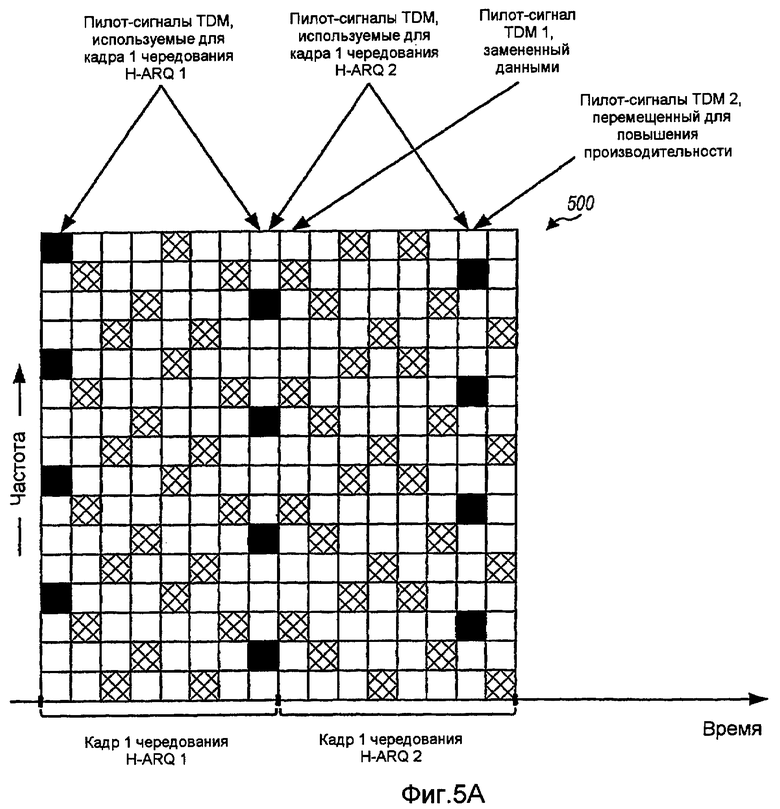
На фиг.5A показан вариант осуществления 2-кадрового шаблона 500 пилот-сигнала, который можно использовать для передачи на одном наборе поднесущих в двух последовательных чередованиях H-ARQ. Многокадровый шаблон пилот-сигнала можно рассматривать как соединение нескольких однокадровых шаблонов пилот-сигнала. Для шаблона 500 пилот-сигнала пилот-сигналы TDM передаются в первом и последнем периодах символов кадра 1 чередования H-ARQ 1 (или в кадре 1,1), и пилот-сигнал TDM передается в периоды символов кадра со второго по последний 1 чередования H-ARQ 2 (или в кадре 1,2). Канальную оценку для кадра 1,1 можно вывести на основании пилот-сигналов TDM, переданных в первом и последнем периодах символов этого кадра. Канальную оценку для кадра 1,2 можно вывести на основании пилот-сигнала TDM, переданного в последний период символов кадра 1,1 и пилот-сигнала TDM, переданного в периоды символов кадра 1,2 со второго по последний. Пилот-сигнал TDM в первом периоде символов кадра 1,2 заменяется данными. Пилот-сигнал TDM в кадре 1,2 можно переставить для повышения производительности.
На фиг.5B показан вариант осуществления 3-кадрового шаблона 510 пилот-сигнала, который можно использовать для передачи на одном наборе поднесущих в трех последовательных чередованиях H-ARQ. Для шаблона 510 пилот-сигнала пилот-сигнал TDM передается во второй период символов кадра 1 чередования H-ARQ 1 (или в кадре 1,1), пилот-сигналы TDM передаются в первом и последнем периодах символов кадра 1 чередования H-ARQ 2 (или в кадре 1,2), и пилот-сигнал TDM передается в периоды символов кадра со второго по последний 1 чередования H-ARQ 3 (или в кадре 1,3). Канальную оценку для кадра 1,1 можно вывести на основании пилот-сигнала TDM, переданного во второй период символов этого кадра и пилот-сигнала TDM, переданного в первый период символов кадра 1,2. Канальную оценку для кадра 1,2 можно вывести на основании пилот-сигналов TDM, переданных в первом и последнем периодах символов этого кадра. Канальную оценку для кадра 1,3 можно вывести на основании пилот-сигнала TDM, переданного в последний период символов кадра 1,2 и пилот-сигнала TDM, переданного в периоды символов кадра 1,3 со второго по последний.
На фиг.5A и 5B показаны иллюстративные шаблоны пилот-сигнала для двух и трех последовательных чередований H-ARQ соответственно. Эти шаблоны пилот-сигнала поддерживают равномерное разнесение в 7 периодов символов между последовательными пилот-сигналами TDM. Для передачи также можно задавать и использовать другие шаблоны пилот-сигнала.
Согласно варианту осуществления разные однокадровые шаблоны пилот-сигнала можно использовать для разных кадров в зависимости от назначения ресурсов, например, как показано на фиг.5A и 5B. В этом варианте осуществления шаблоны пилот-сигнала для разных кадров могут иметь пилот-сигналы TDM, находящиеся в разных периодах символа. Согласно варианту осуществления, показанному на фиг.5A, пилот-сигнал TDM для кадра 1,2 сдвинут на один период символа назад для повышения производительности оценивания канала для этого кадра. Согласно варианту осуществления, показанному на Фиг.5B, пилот-сигнал TDM для кадра 1,1 сдвинут на один период символа вперед, и пилот-сигнал TDM для кадра 1,3 сдвинут на один период символа назад для повышения производительности оценивания канала для этих кадров.
Согласно другому варианту осуществления один и тот же шаблон пилот-сигнала используется для каждого кадра, но избыточные пилот-сигналы TDM можно заменять данными. Согласно фиг.5A пилот-сигнал TDM можно передавать в последний период символов (а не в периоды символов со второго по последний) кадра 1,2. Согласно фиг.5B пилот-сигнал TDM можно передавать в первый период символов (а не во второй период символов) кадра 1,1, и пилот-сигнал TDM можно передавать в последний период символов (а не в периоды символов со второго по последний) кадра 1,3. Пилот-сигнал TDM в последнем периоде символов кадра или пилот-сигнал TDM в первом периоде символов следующего кадра можно заменять данными.
В целом, любой набор шаблонов пилот-сигнала, который обеспечивает высокую производительность, можно использовать для каждого отдельного назначения H-ARQ.
Однокадровый шаблон пилот-сигнала можно использовать для назначения одного чередования H-ARQ, 2-кадровый шаблон пилот-сигнала можно использовать для назначения двух чередований H-ARQ, 3-кадровый шаблон пилот-сигнала можно использовать для назначения трех чередований H-ARQ и т.д. Каждый шаблон пилот-сигнала может быть предназначен для обеспечения высокой производительности для соответствующего количества чередований H-ARQ. Доступные шаблоны пилот-сигнала могут быть заранее известны передатчику и приемнику, благодаря чему оба знают конкретный шаблон пилот-сигнала, подлежащий использованию для передачи, в зависимости от назначения H-ARQ.
На фиг.5A и 5B показаны случаи, когда назначения ресурсов могут быть статическими и заранее известными. Для каждого назначения можно выбрать надлежащий шаблон пилот-сигнала, используемый для всей передачи. Например, можно использовать шаблон 500 пилот-сигнала, если назначено два последовательных чередования H-ARQ, и можно использовать шаблон 510 пилот-сигнала, если назначено три последовательных чередования H-ARQ. Другой шаблон пилот-сигнала можно выбирать всякий раз при изменении назначения, которое может происходить часто или нечасто.
Назначения ресурсов могут быть динамическими, могут быстро изменяться во времени и могут быть заранее неизвестными. В этом случае может оказаться невозможно выбрать конкретный шаблон пилот-сигнала, подлежащий использованию в течение продолжительного периода времени, поскольку выбранный шаблон пилот-сигнала может не согласовываться с разными назначениями. Например, пакет можно передавать на данном чередовании H-ARQ, пока пакет не закончится, и затем можно передавать новый пакет на этом чередовании H-ARQ. В системе множественного доступа, доступные чередования H-ARQ могут совместно использоваться всеми пользователями, и новые пакеты можно передавать всякий раз, когда чередования H-ARQ становятся доступными. Неопределенность в отношении того, когда можно передавать новые пакеты, а также чередований H-ARQ, используемых для передачи этих пакетов, может приводить к динамическим и непредсказуемым назначениям ресурсов.
Согласно варианту осуществления шаблоны пилот-сигнала динамически выбираются на основании текущего и предыдущего назначений. Выбор шаблона пилот-сигнала может осуществляться для каждого импульса передачи, который является непрерывной передачей в одном или нескольких последовательных кадрах. Длительность каждого импульса передачи может быть заранее не известна. Например, будет ли назначен следующий кадр, может быть неизвестно до окончания текущего кадра. Шаблон пилот-сигнала для каждого кадра можно выбирать на основании шаблона(ов) пилот-сигнала, используемого(ых) для предыдущего(их) кадра(ов), если таковой существует, в текущем импульсе передачи.
На фиг.6A показан вариант осуществления размещения 600 пилот-сигнала для импульса передачи двух кадров. В этом варианте осуществления, для первого кадра импульса передачи, однокадровый шаблон 610 пилот-сигнала выбран для обеспечения высокой производительности для этого кадра, без опоры на какие-либо пилот-сигналы в предыдущем кадре, которого не существует. Шаблон 610 пилот-сигнала включает в себя пилот-сигналы TDM в первом и последнем периодах символов кадра. Для второго кадра импульса передачи однокадровый шаблон 612 пилот-сигнала выбран для обеспечения высокой производительности для этого кадра с использованием шаблона 610 пилот-сигнала для предыдущего кадра. Шаблон 612 пилот-сигнала включает в себя пилот-сигнал TDM в периоде символов кадра со второго по последний. Размещение пилот-сигнала TDM в шаблоне 612 пилот-сигнала определяется размещением пилот-сигналов TDM в шаблоне 610 пилот-сигнала, используемом в предыдущем кадре.
На фиг.6B показан вариант осуществления размещения 602 пилот-сигнала для импульса передачи трех кадров. В этом варианте осуществления шаблон 610 пилот-сигнала используется для первого кадра импульса передачи, и шаблон 612 пилот-сигнала используется для второго кадра, как описано выше. Для третьего кадра однокадровый шаблон 614 пилот-сигнала выбран для обеспечения высокой производительности для этого кадра с использованием шаблона 612 пилот-сигнала для второго кадра. Шаблон 614 пилот-сигнала включает в себя пилот-сигнал TDM в периоде символов кадра с третьего по последний. Размещение пилот-сигнала TDM в шаблоне 614 пилот-сигнала может определяться размещением пилот-сигналов TDM в шаблоне 612 пилот-сигнала, используемом в предыдущем кадре, или в шаблонах 610 и 612 пилот-сигнала в двух предыдущих кадрах.
На фиг.6A и 6B показаны варианты осуществления, в которых шаблоны пилот-сигнала поддерживают равномерное разнесение в 7 периодов символов между последовательными пилот-сигналами TDM. Этот вариант осуществления можно распространить на назначения более чем трех последовательных кадров. Пилот-сигнал TDM для каждого последовательного кадра можно передавать на один период символов раньше для поддержания того же разнесения. Для передачи также можно использовать другие шаблоны пилот-сигнала.
Передатчик и приемник могут заранее знать конкретные шаблоны пилот-сигнала, подлежащие использованию при динамическом назначении ресурсов. Это позволяет избежать необходимости в передаче сигнализации для переноса шаблонов пилот-сигнала, подлежащих использованию. Если каждое назначение ресурсов связано с конкретным шаблоном пилот-сигнала, то сигнализацию для переноса назначения ресурсов можно рассматривать как явную сигнализацию для соответствующего шаблона пилот-сигнала. Альтернативно, сигнализацию можно передавать в явном виде для переноса шаблонов пилот-сигнала, подлежащих использованию.
Согласно вариантам осуществления, показанным на фиг.5A-6B, приемник может сохранять наблюдения пилот-сигнала текущего и, возможно предыдущих кадров для использования для оценивания канала в последующих кадрах. Использование наблюдений пилот-сигнала из одного кадра для оценивания канала в другом кадре позволяет повторно оптимизировать местоположения пилот-сигнала, а также снижать служебную нагрузку обработки пилот-сигнала в последующих кадрах. Таким образом, можно повышать эффективность системы в целом, не влияя на производительность.
На фиг.4A-6B показаны варианты осуществления, в которых каждый период символа имеет одну и ту же длительность. Пилот-сигнал TDM также можно передавать в период символов, который короче или длиннее периода символов для данных. Например, более короткий пилот-сигнал TDM приблизительно половинной длительности можно генерировать, осуществляя P-точечное БПФ на P символах пилот-сигнала, отображая P значений в частотном измерении в P назначенных поднесущих, вставляя нулевые значения для K/2-P оставшихся поднесущих, осуществляя K/2-точечное IFFT, и присоединяя циклический префикс. Каждая поднесущая в более коротком пилот-сигнале TDM будет занимать две последовательные поднесущие в регулярном пилот-сигнале TDM.
Для ясности методы передачи пилот-сигнала были описаны применительно к пилот-сигналам TDM, передаваемым на равномерно распределенных поднесущих. Эти пилот-сигналы TDM можно генерировать по-разному для IFDMA и OFDMA, как описано выше. Методы передачи пилот-сигнала также можно использовать для LFDMA и EFDMA, а также для OFDMA с другими структурами поднесущих. В целом, пилот-сигнал должен распределяться по частотному диапазону, представляющему интерес, и времени для регистрации изменений на канале по частоте и во времени. Частотный диапазон, представляющий интерес, обычно охватывает частотный диапазон, используемый для передачи данных, которым может представлять собой всю полосу пропускания системы или часть полосы пропускания системы.
Для структуры 300 поднесущих, показанной на фиг.3A, и структуры 320 поднесущих, показанной на фиг.3C, каждый набор поднесущих занимает всю полосу пропускания системы. Пилот-сигнал TDM, переданный на одном наборе поднесущих, можно затем использовать для оценки характеристики канала по всей полосе пропускания системы. Таким образом, можно добиться сокращения количества пилот-сигналов TDM, как описано выше, независимо от того, применяется ли скачкообразная перестройка частоты.
Для структуры 310 поднесущих, показанной на фиг.3B, каждый набор поднесущих занимает только часть всей полосы пропускания системы. Пилот-сигнал TDM, переданный на одном наборе поднесущих, можно затем использовать для оценки характеристики канала по части полосы пропускания системы. Если скачкообразная перестройка частоты не применяется, и один и тот же набор поднесущих используется в разных кадрах, то можно добиться сокращения количества пилот-сигналов TDM, как описано выше. Если скачкообразная перестройка частоты применяется, и разные наборы поднесущих используются в разных кадрах, то наблюдения пилот-сигнала для одного кадра могут быть неприменимы для другого кадра, если эти кадры занимают разные частотные диапазоны. Таким образом, можно добиться сокращения количества пилот-сигналов TDM всякий раз, когда наблюдения пилот-сигнала для одного кадра можно использовать для другого кадра.
Для SC-FDMA и OFDMA пилот-сигналы TDM можно передавать как описано выше, причем пилот-сигналы TDM обеспечивают более низкой PAPR для SC-FDMA. Для SC-FDMA и OFDMA также можно мультиплексировать символы пилот-сигнала и данных на разных поднесущих в одном и том же периоде символов, хотя и с более высоким PAPR для SC-FDMA. Мультиплексирование пилот-сигнала и данных может обеспечивать повышение гибкости при снижении служебной нагрузки обработки пилот-сигнала. Например, если назначен один набор поднесущих, то пилот-сигнал можно передавать на половине поднесущих в последний период символов одного кадра и на половине поднесущих в первый период символов следующего кадра. Если назначено несколько наборов поднесущих, то пилот-сигнал можно передавать на одном наборе поднесущих, и данные можно передавать на остальных наборах поднесущих.
Пилот-сигналы, переданные передатчиком, приемник может использовать для вывода различных типов информации канала. Приемник может выводить оценку частотной характеристики канала в частотном измерении и/или оценку импульсной характеристики канала во временном измерении на основании принятых пилот-сигналов. Приемник также может оценивать качество принятого сигнала для передатчика на основании принятых пилот-сигналов. Качество сигнала можно количественно выразить посредством отношения сигнал/шум (SNR), отношения сигнал/шум+помеха (SINR), отношения несущая/помеха (C/I), отношения энергия символа/шум (Es/No) и т.д. Качество принятого сигнала можно переносить посредством отчета индикации качества канала (CQI), формата пакетов, скорости передачи данных и т.д. Приемник также может выводить оценку помехи на основании принятых пилот-сигналов. Методы вывода этих различных оценок известны в технике и не описаны здесь.
Описанные здесь методы передачи пилот-сигнала можно использовать для различных схем мультиплексирования и различных типов пилот-сигнала, как указано выше. Методы имеют особое преимущество для систем, в которых используются пилот-сигналы TDM, например, для поддержания низкого PAPR для IFDMA, LFDMA, и EFDMA. Использование пилот-сигналов TDM ограничивает степень свободы при снижении служебной нагрузки обработки пилот-сигнала. Методы позволяют снижать служебную нагрузку пилот-сигнала для пилот-сигналов TDM, а также других типов пилот-сигнала, одновременно поддерживая высокую производительность.
На фиг.7 показан вариант осуществления процесса 700 передачи или приема конфигурируемых пилот-сигналов. Процесс 700 может осуществляться передатчиком или приемником. Определяется назначение ресурсов для передачи в системе беспроводной связи (блок 712). Для разных назначений ресурсов используются разные размещения пилот-сигналов. Затем определяются размещения пилот-сигнала для передачи на основании назначения ресурсов (блок 714). Пилот-сигналы передаются передатчиком (или принимаются приемником) в положениях во временном и частотном измерениях, определяемых размещением пилот-сигналов (блок 716).
Назначение может относиться к одному или нескольким последовательным кадрам. Затем можно определить размещение, по меньшей мере, одного пилот-сигнала в каждом кадре на основании размещения, по меньшей мере, одного пилот-сигнала в, по меньшей мере, одном предыдущем кадре. Например, по меньшей мере, один период символов, подлежащий использованию для, по меньшей мере, одного пилот-сигнала в текущем кадре, можно определить на основании, по меньшей мере, одного периода символов, используемого для, по меньшей мере, одного пилот-сигнала в предыдущем кадре. Пилот-сигналы могут размещаться по кадрам равномерно или иными способами.
Назначение может относиться к одному или нескольким чередованиям H-ARQ. Затем можно определить размещение, по меньшей мере, одного пилот-сигнала в каждом чередовании H-ARQ на основании количества чередований H-ARQ в назначении, размещения, по меньшей мере, одного пилот-сигнала в предыдущем чередовании H-ARQ и т.д.
Назначение ресурсов может быть статическим и использоваться для всей передачи. В этом случае размещение пилот-сигнала может быть статическим и заранее известным на основании назначения. Альтернативно, назначение ресурсов может быть динамическим и изменяться в течение передачи. Например, назначен ли следующий кадр, может быть неизвестно до окончания текущего кадра. Размещение пилот-сигнала также может быть динамическим и может уточняться по мере назначения дополнительных ресурсов.
Размещение пилот-сигналов можно определить по одному или нескольким шаблонам пилот-сигнала. Для разных назначений ресурсов можно использовать разные шаблоны пилот-сигнала. По меньшей мере, один шаблон пилот-сигнала можно выбирать для использования на основании назначения. Если назначение содержит несколько последовательных кадров, то шаблон пилот-сигнала, подлежащий использованию для каждого кадра, можно определить на основании шаблона пилот-сигнала, используемого для предыдущего кадра.
В целом, каждый пилот-сигнал можно передавать на одной или нескольких поднесущих в одном или нескольких периодах символов. Пилот-сигналы могут представлять собой пилот-сигналы TDM, причем каждый пилот-сигнал TDM передается на всех назначенных поднесущих в заранее определенный интервал времени, например один период символов. Размещение каждого пилот-сигнала TDM можно определить на основании назначения. Пилот-сигналы можно передавать с использованием различных схем мультиплексирования, например IFDMA, LFDMA, EFDMA, OFDMA и т.д. Пилот-сигналы и данные можно передавать с использованием одной и той же или разных схем мультиплексирования.
На фиг.8 показан вариант осуществления устройства 800, поддерживающего конфигурируемые пилот-сигналы. Устройство 800 включает в себя один или несколько процессоров для определения назначения ресурсов для передачи в системе беспроводной связи (блок 812), один или несколько процессоров для определения размещения пилот-сигналов для передачи на основании назначения ресурсов (блок 814), и один или несколько процессоров для передачи (или приема) пилот-сигналов в положениях во временном и частотном измерениях, определяемых размещением пилот-сигналов (блок 816).
На фиг.9 показан вариант осуществления процесса 900 приема конфигурируемых пилот-сигналов. Процесс 900 может осуществляться приемником. Размещение, по меньшей мере, одного пилот-сигнала в текущей передаче определяется на основании размещения, по меньшей мере, одного пилот-сигнала в, по меньшей мере, одной предыдущей передаче (блок 912). Пилот-сигналы, принятые в текущей передаче, и, по меньшей мере, одной предыдущей передаче, обрабатываются для получения информации канала (блок 914). Разные размещения пилот-сигнала можно использовать для разных назначений ресурсов. Затем размещения пилот-сигнала в текущей и предыдущей передачах можно определить на основании назначения ресурсов. Текущую и предыдущую передачи можно принимать в последовательных кадрах, на разных чередованиях H-ARQ и т.д. Каждая передача может представлять собой передачу в кадре, на чередовании H-ARQ и т.д. Информация канала может содержать оценку частотной характеристики канала, оценку импульсной характеристики канала, оценку качества принятого сигнала, оценку помехи, некоторые другие оценки или их комбинацию.
На фиг.10 показан вариант осуществления устройства 1000 приема конфигурируемых пилот-сигналов. Устройство 1000 включает в себя один или несколько процессоров для определения размещения, по меньшей мере, одного пилот-сигнала в текущей передаче на основании размещения, по меньшей мере, одного пилот-сигнала в, по меньшей мере, одной предыдущей передаче (блок 1012), и один или несколько процессоров для обработки пилот-сигналов, принятых в текущей передаче и в, по меньшей мере, одной предыдущей передаче, для получения информации канала (блок 1014).
Описанные здесь методы передачи пилот-сигнала можно реализовать различными средствами. Например, эти методы можно реализовать в оборудовании, программном обеспечении или в их комбинации. Для аппаратной реализации блоки обработки, используемые для оценки канала, можно реализовать в одной или нескольких специализированных интегральных схемах (СИС), цифровых сигнальных процессорах (ЦСП), устройствах цифровой обработки сигнала (DSPD), программируемых логических устройствах (ПЛУ), вентильных матрицах, программируемых пользователем (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных устройствах, призванных осуществлять описанные здесь функции, или в их комбинациях.
Для программно-аппаратной и/или программной реализации методы можно реализовать посредством инструкций (команд) (например, процедур, функций, и т.д.), которые один или несколько процессоров могу использовать для осуществления описанных здесь функций. Программно-аппаратные и/или программные инструкции могут храниться в памяти (например, памяти 142 или 182 на фиг.1) и выполняться одним или несколькими процессорами (например, процессором 140 или 180). Память можно реализовать в процессоре или вне процессора.
Вышеприведенное описание раскрытых вариантов осуществления предназначено для того, чтобы специалист в данной области техники мог применять настоящее изобретение. Специалист в данной области техники может предложить различные модификации этих вариантов осуществления и применить установленные здесь общие принципы к другим вариантам осуществления без отхода от сущности и объема изобретения. Таким образом, настоящее изобретение не подлежит ограничению показанными здесь вариантами осуществления, но должно охватывать широчайший объем, согласующийся с раскрытыми здесь принципами и новыми признаками.
Описаны методы передачи конфигурируемых пилот-сигналов в системе беспроводной связи. Технический результат заключается в высокой производительности передачи пилот-сигналов с одновременным снижением служебной нагрузки обработки пилот-сигнала. Для этого размещение пилот-сигналов определяют на основании назначения ресурсов для передачи. Для разных назначений ресурсов используют разные размещения пилот-сигналов. Назначение может относиться к одному или нескольким кадрам и/или одному или нескольким чередованиям H-ARQ. Размещение пилот-сигнала(ов) в каждом кадре или чередовании H-ARQ можно определить на основании размещения пилот-сигнала(ов) в предыдущем(их) кадре(ах) или чередовании(ях) H-ARQ. Пилот-сигналы передают в положениях во временном и частотном измерениях, определяемых размещением пилот-сигналов. Каждый пилот-сигнал можно передавать на одной или нескольких поднесущих в одном или нескольких периодах символов. Пилот-сигналы могут представлять собой пилот-сигналы TDM и/или пилот-сигналы какого-либо другого типа. Пилот-сигналы можно передавать с использованием IFDMA, LFDMA, EFDMA, OFDMA или какой-либо другой схемы мультиплексирования. 6 н. и 31 з.п. ф-лы, 16 ил.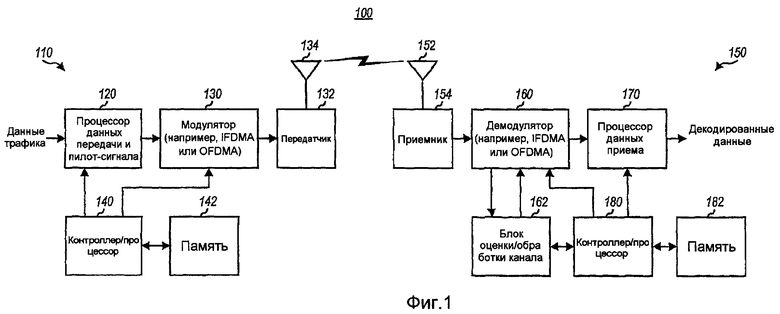
1. Устройство для передачи пилот-сигналов эффективным образом для достижения высокой производительности с одновременным снижением служебной нагрузки пилот-сигнала в системе беспроводной связи, содержащее
средство определения назначения ресурсов для передачи в системе беспроводной связи, причем назначение предназначено, по меньшей мере, для одного чередования H-ARQ, и в котором средство выбора содержит
средство определения размещения, по меньшей мере, одного пилот-сигнала в предыдущем чередовании H-ARQ, причем разные размещения пилот-сигналов используются для разных назначений ресурсов, которые соответствуют либо разным количествам кадров, разным количествам чередований H-ARQ, либо разным количествам поднесущих.
2. Устройство по п.1, в котором назначение содержит, по меньшей мере, один кадр, и в котором средство определения содержит
средство определения размещения, по меньшей мере, одного пилот-сигнала в каждом кадре на основании размещения, по меньшей мере, одного пилот-сигнала в, по меньшей мере, одном предыдущем кадре.
3. Устройство по п.1, в котором пилот-сигналы содержат пилот-сигналы, мультиплексированные с временным разделением (TDM), и в котором средство определения содержит
средство определения размещения каждого из пилот-сигналов TDM на основании назначения ресурсов.
4. Устройство по п.1, в котором пилот-сигналы передаются с использованием множественного доступа с частотным разделением на одной несущей (SC-FDMA) или множественного доступа с ортогональным частотным разделением (OFDMA).
5. Устройство по п.1, в котором средство определения назначения ресурсов содержит, по меньшей мере, один процессор, сконфигурированный с возможностью определения упомянутого назначения ресурсов, и в котором упомянутое средство определения размещения пилот-сигналов содержит упомянутый, по меньшей мере, один процессор, сконфигурированный с возможностью определения упомянутого размещения пилот-сигналов.
6. Устройство по п.5, в котором назначение содержит, по меньшей мере, один кадр, причем каждый кадр занимает заранее определенный интервал времени.
7. Устройство по п.6, в котором, по меньшей мере, один процессор сконфигурирован с возможностью определения размещения пилот-сигналов путем определения размещения, по меньшей мере, одного пилот-сигнала в каждом кадре на основании размещения, по меньшей мере, одного пилот-сигнала в, по меньшей мере, одном предыдущем кадре, если он существует.
8. Устройство по п.6, в котором, по меньшей мере, один процессор сконфигурирован с возможностью определения, по меньшей мере, одного периода символов, подлежащего использованию для, по меньшей мере, одного пилот-сигнала в каждом кадре на основании, по меньшей мере, одного периода символов, используемого для, по меньшей мере, одного пилот-сигнала в, по меньшей мере, одном предыдущем кадре, если он существует.
9. Устройство по п.6, в котором пилот-сигналы размещены в определенном размещении пилот-сигналов равномерно по, по меньшей мере, одному кадру.
10. Устройство по п.5, в котором назначение относится к, по меньшей мере, одному чередованию H-ARQ, и в котором, по меньшей мере, один процессор сконфигурирован с возможностью определения размещения, по меньшей мере, одного пилот-сигнала в каждом из, по меньшей мере, одного чередования H-ARQ.
11. Устройство по п.10, в котором размещение, по меньшей мере, одного пилот-сигнала в каждом чередовании H-ARQ определяется на основании количества чередований H-ARQ в назначении.
12. Устройство по п.10, в котором размещение, по меньшей мере, одного пилот-сигнала в каждом чередовании H-ARQ определяется на основании размещения, по меньшей мере, одного пилот-сигнала в предыдущем чередовании H-ARQ, если оно существует.
13. Устройство по п.5, в котором разные шаблоны пилот-сигнала связаны с разными назначениями ресурсов, и в котором, по меньшей мере, один процессор сконфигурирован с возможностью определения, по меньшей мере, одного шаблона пилот-сигнала, подлежащего использованию для пилот-сигналов, на основании назначения ресурсов.
14. Устройство по п.6, в котором, по меньшей мере, один процессор сконфигурирован с возможностью определения шаблона пилот-сигнала, подлежащего использованию для каждого кадра на основании шаблона пилот-сигнала для предыдущего кадра, если он существует.
15. Устройство по п.5, в котором пилот-сигналы содержат пилот-сигналы, мультиплексированные с временным разделением (TDM), и в котором, по меньшей мере, один процессор сконфигурирован с возможностью определения размещения каждого из пилот-сигналов TDM на основании назначения ресурсов.
16. Устройство по п.5, в котором, по меньшей мере, один процессор сконфигурирован с возможностью передачи пилот-сигналов в положениях во временном и частотном измерениях, определяемых определенным размещением пилот-сигналов.
17. Устройство по п.5, в котором, по меньшей мере, один процессор сконфигурирован с возможностью приема пилот-сигналов из положений во временном и частотном измерениях, определяемых определенным размещением пилот-сигналов.
18. Устройство по п.5, в котором пилот-сигналы передаются с использованием множественного доступа с частотным разделением с перемежением (IFDMA).
19. Устройство по п.5, в котором пилот-сигналы передаются с использованием множественного доступа с частотным разделением на одной несущей (SC-FDMA) или множественного доступа с ортогональным частотным разделением (OFDMA).
20. Устройство по п.5, в котором назначение ресурсов является статическим и используется для всей передачи.
21. Устройство по п.5, в котором назначение ресурсов является динамическим и изменяется в течение передачи.
22. Способ передачи пилот-сигналов эффективным образом для достижения высокой производительности с одновременным снижением служебной нагрузки пилот-сигнала в беспроводной связи, содержащий этапы, на которых
определяют назначение ресурсов, которые соответствуют либо разным количествам кадров, разным количествам чередований H-ARQ, либо разным количествам поднесущих для передачи в системе беспроводной связи, причем назначение содержит, по меньшей мере, одно чередование H-ARQ, и выбирают размещения пилот-сигналов на основании назначения ресурсов, причем для разных назначений ресурсов используют разные размещения пилот-сигналов, и в котором на этапе выбора определяют размещение, по меньшей мере, одного пилот-сигнала в каждом чередовании H-ARQ на основании размещения, по меньшей мере, одного пилот-сигнала в предыдущем чередовании H-ARQ.
23. Способ по п.22, в котором пилот-сигналы содержат пилот-сигналы, мультиплексированные с временным разделением (TDM), и в котором на этапе определения
определяют размещение каждого из пилот-сигналов TDM на основании назначения ресурсов.
24. Способ по п.22, в котором пилот-сигналы передают с использованием множественного доступа с частотным разделением на одной несущей (SC-FDMA) или множественного доступа с ортогональным частотным разделением (OFDMA).
25. Носитель информации, считываемый процессором, содержащий команды, сохраненные на нем, которые при исполнении одним или несколькими процессорами, предписывают одному или нескольким процессорам выполнять способ передачи пилот-сигналов эффективным образом для достижения высокой производительности с одновременным снижением служебной нагрузки пилот-сигнала, при этом способ содержит этапы, на которых
определяют назначения ресурсов для передачи в системе беспроводной связи, и
определяют размещения пилот-сигналов на основании назначения ресурсов, которые соответствуют либо разным количествам кадров, разным количествам чередований H-ARQ, либо разным количествам поднесущих, причем для разных назначений ресурсов используют разные размещения пилот-сигналов.
26. Устройство для передачи пилот-сигналов эффективным образом для достижения высокой производительности с одновременным снижением служебной нагрузки пилот-сигнала в беспроводной связи, содержащее
средство определения назначения ресурсов, которые соответствуют либо разным количествам кадров, разным количествам чередований H-ARQ, либо разным количествам поднесущих,
средство определения размещения, по меньшей мере, одного пилот-сигнала в текущей передаче на основании, по меньшей мере, одного местоположения, по меньшей мере, одной предыдущей передачи, и
средство обработки пилот-сигналов, принятых в текущей передаче и в, по меньшей мере, одной предыдущей передаче, для получения информации канала.
27. Устройство по п.26, в котором пилот-сигналы содержат пилот-сигналы, мультиплексированные с временным разделением (TDM), и в котором средство определения размещения, по меньшей мере, одного пилот-сигнала в текущей передаче содержит
средство определения размещения, по меньшей мере, одного пилот-сигнала TDM в текущей передаче на основании размещения, по меньшей мере, одного пилот-сигнала TDM в, по меньшей мере, одной предыдущей передаче.
28. Устройство по п.26, дополнительно содержащее
средство приема текущей передачи и, по меньшей мере, одной предыдущей передачи в последовательных кадрах.
29. Устройство по п.26, в котором упомянутое средство определения размещения содержит, по меньшей мере, один процессор, сконфигурированный с возможностью определения упомянутого размещения, и в котором упомянутое средство обработки пилот-сигналов содержит упомянутый, по меньшей мере, один процессор, сконфигурированный с возможностью обработки упомянутых пилот-сигналов.
30. Устройство по п.29, в котором пилот-сигналы содержат пилот-сигналы, мультиплексированные с временным разделением (TDM), и в котором, по меньшей мере, один процессор сконфигурирован с возможностью
определения размещения, по меньшей мере, одного пилот-сигнала TDM в текущей передаче на основании размещения, по меньшей мере, одного пилот-сигнала TDM в, по меньшей мере, одной предыдущей передаче.
31. Устройство по п.29, в котором, по меньшей мере, один процессор сконфигурирован с возможностью приема текущей передачи и, по меньшей мере, одной предыдущей
передачи в последовательных кадрах.
32. Устройство по п.29, в котором, по меньшей мере, один процессор сконфигурирован с возможностью
приема текущей передачи и, по меньшей мере, одной предыдущей передачи на множественных чередованиях H-ARQ.
33. Устройство по п.29, в котором информация канала содержит оценку частотной характеристики канала, оценку импульсной характеристики канала, оценку качества принятого сигнала, оценку помехи или их комбинацию.
34. Способ передачи пилот-сигналов эффективным образом для достижения высокой производительности с одновременным снижением служебной нагрузки пилот-сигнала в беспроводной связи, содержащий этапы, на которых
определяют назначение ресурсов, которые соответствуют либо разным количествам кадров, разным количествам чередований H-ARQ, либо разным количествам поднесущих, определяя, по меньшей мере, одно местоположение, по меньшей мере, одного пилот-сигнала в, по меньшей мере, одной предыдущей передаче, и
обрабатывают пилот-сигналы, принятые в текущей передаче и в, по меньшей мере, одной предыдущей передаче, для получения информации канала.
35. Способ по п.34, в котором пилот-сигналы содержат пилот-сигналы, мультиплексированные с временным разделением (TDM), и в котором на этапе определения размещения, по меньшей мере, одного пилот-сигнала в текущей передаче определяют размещение, по меньшей мере, одного пилот-сигнала
TDM в текущей передаче на основании размещения, по меньшей мере, одного пилот-сигнала TDM в, по меньшей мере, одной предыдущей передаче.
36. Способ по п.34, дополнительно содержащий этап, на котором
принимают текущую передачу и, по меньшей мере, одну предыдущую передачу в последовательных кадрах.
37. Носитель информации, считываемый процессором, содержащий команды, сохраненные на нем, которые при исполнении одним или несколькими процессорами, предписывают одному или нескольким процессорам выполнять способ определения размещений пилот-сигналов для передачи на основании назначения ресурсов, которые соответствуют либо разным количествам кадров, разным количествам чередований H-ARQ, либо разным количествам поднесущих для передачи пилот-сигналов эффективным образом для достижения высокой производительности с одновременным снижением служебной нагрузки пилот-сигнала, причем способ содержит этапы, на которых
определяют размещение, по меньшей мере, одного пилот-сигнала в текущей передаче на основании размещения, по меньшей мере, одного пилот-сигнала в, по меньшей мере, одной предыдущей передаче, и
обрабатывают пилот-сигналы, принятые в текущей передаче и в, по меньшей мере, одной предыдущей передаче, для получения информации канала.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СЧИТЫВАЕМЫЙ КОМПЬЮТЕРОМ НОСИТЕЛЬ С МИКРОПРОЦЕССОРОМ ДЛЯ УПРАВЛЕНИЯ СЧИТЫВАНИЕМ И КОМПЬЮТЕР, ПРИСПОСОБЛЕННЫЙ ДЛЯ УСТАНОВЛЕНИЯ СВЯЗИ С ТАКИМ НОСИТЕЛЕМ | 1999 |
|
RU2249261C2 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| EP 1503534 A1, 02.02.2005. | |||

