Изобретение относится к области вычислительной техники, в частности к устройствам системы круиз-контроля автомобиля, позволяющим контролировать состояния устройств и агрегатов, а именно состояния шин автомобиля.
Известна система контроля шин автомобиля (см. патент РА №17689, кл. A61N 1/36, 1994 г.), содержащая пневматический баллон, датчик давления воздуха, колесные клапаны и головки подвода воздуха по числу ведущих колес, связанные посредством трубопроводов и шлангов, блок управления, датчики крутящих моментов и датчики тяговых усилий, связанные посредством электрических цепей с электрическим блоком управления, причем колесные клапаны выполнены в виде электромагнитных клапанов и соединены с блоком управления.
Недостатки известного устройства состоят в том, что наличие электрических цепей между блоком управления и датчиками существенно ухудшает надежностные характеристики системы, а отсутствие контроля температуры не позволяет выявить одновременно неисправности, связанные с повышением температуры, например тормозной системы, подшипников ступицы и прочее.
Признаками аналога, совпадающими с признаками заявляемого технического решения, являются блок управления и датчик давления.
Причины, препятствующие достижению требуемого технического результата, состоят в особенностях структурной реализации известного устройства, не позволяющие обеспечить высокую надежность функционирования и ограничивающие функциональные возможности системы.
Известна система контроля шин автомобиля (см. патент №61642 от 2007.03.10, МПК7 B60C 23/04, 1994 г., автор Белый Д.М.), содержащая полый цилиндрический корпус, ввернутый радиально одним концом в резьбовое отверстие в ободе колеса, и концентрично размещенный внутри корпуса шток, имеющий на одном конце упорную пяту, введенную в упругий контакт с шиной колеса с помощью отжимной пружины, отличающаяся тем, что устройство дополнительно снабжено цилиндрическим постоянным магнитом с осевым отверстием, насаженным на другой конец штока, а также измерительной катушкой, концентрично охватывающей магнит с рабочим зазором, закрепленной внутри немагнитного корпуса и посредством блока передачи связанной с блоком индикации, который расположен на приборной панели блока индикации.
Недостатки известного устройства состоят в том, что при применении для идентификации состояний шин возможностей магнитного поля ограничивается дальность передачи информации и не обеспечивается высокая точность измерений. Также отсутствие контроля температуры в шинах транспортного средства не обеспечивает контроль неисправностей ходовой части, связанных с повышением температуры, а также измерения давления «холодной» накачки, которое должно соответствовать требованиям автопроизводителя.
Признаками аналога, совпадающими с признаками заявляемого технического решения, являются датчики в виде измерительной катушки, блок передачи и блок индикации.
Причины, препятствующие достижению требуемого технического результата, состоят в особенностях структурной реализации известного устройства, снижающих функциональные возможности, так как не обеспечивается точность передачи информации для автомобилей с большим удалением колес от блока индикации и не обеспечивается выполнение функций контроля неисправностей ходовой части, связанных с повышением температуры, измерения давления «холодной» накачки.
Наиболее близким к предлагаемой системе контроля шин автомобиля по совокупности функциональных и конструктивных признаков является устройство для сигнализации о падении давления воздуха в шине транспортного средства (см. патент РФ №2103184, МПК6 B60C 23/02, опубликованный 27.01.1998 г., автора Исаева И.М.), содержащее колпачок, который навинчивается на вентиль шины вместо штатного колпачка, и корпус, в отверстие которого введена снабженная воздушным фильтром втулка с головкой для отжима штока золотника вентиля шины, причем внутри корпуса размещен датчик давления с мембраной и блоком сопряжения, а также радиопередатчик и аккумуляторная батарея, а в кабине водителя установлен блок индикации и радиоприемник, который запускает звуковой сигнализатор.
К недостатку известного устройства следует отнести то, что датчик с мембраной отслеживает лишь уровень порогового давления и не позволяет отслеживать аварийные ситуации повышенного давления из-за повышения температуры в шине колеса, что снижает его функциональные возможности. Также известное устройство не позволяет проверить давление по запросу водителя.
Признаками прототипа, совпадающими с признаками заявляемого технического решения, являются датчик давления колеса, блок сопряжения, радиопередатчик, радиоприемник и блок индикации.
Причины, препятствующие достижению требуемого технического результата, состоят в особенностях структурной реализации известного устройства, которые не предоставляют возможности непрерывного контроля давления и температуры в шинах транспортного средства, контроля по запросу водителя.
Задача, на решение которой направлено предлагаемое изобретение, заключается в повышении функциональных возможностей системы контроля шин автомобиля за счет осуществления одновременного и непрерывного контроля как давления, так и температуры в шинах транспортного средства, контроля по запросу водителя, что, в свою очередь, снижает вероятность возникновения аварийных ситуаций, расход топлива и увеличивает срок службы шин автомобиля.
Технический результат от применения предлагаемого изобретения заключается в расширении функциональных возможностей системы контроля шин автомобиля за счет применения интегрированных датчиков давления и температуры, двунаправленного канала связи, алгоритмов функционирования микропроцессорной системы контроля давления и температуры, позволяющей как в автоматическом режиме, так и по запросу водителя транспортного средства осуществлять измерения контролируемых параметров и передавать данные в блок индикации, что в целом снижает вероятность возникновения аварийных ситуаций, расход топлива и увеличивает срок службы шин автомобиля.
Для достижения технического результата в систему контроля шин автомобиля, содержащую блок приема системы, принимающую антенну и блок индикации, а также блок передачи сигналов колеса, передающую антенну и блок сопряжения, дополнительно введены в приемопередатчик системы контроля шин автомобиля n передающих антенн, n приемопередатчиков для каждого из n колес, блок управления приемопередатчика системы, n блоков передачи, в приемопередатчике i-го,  колеса принимающая антенна, блок приема сигналов, датчик питания приемопередатчика, измерительный блок, блок вычисления давления, причем принимающая антенна соединена с информационным входом приемопередатчика системы контроля шин автомобиля, первый, второй, третий и четвертый информационные выходы которого соединены соответственно с первой, второй, третьей и четвертой передающими антеннами, информационный выход приемопередатчика i-го, колеса соединен с передающей антенной i-го колеса, а информационный вход приемопередатчика i-го колеса соединен с принимающей антенной i-го колеса, информационный вход приемопередатчика системы соединен с информационным входом блока приема системы, информационный выход которого соединен с информационным входом блока управления, первый, второй, третий управляющие выходы блока управления соединены с первым, вторым и третьим управляющими входами блока приема системы соответственно, четвертый управляющий выход блока управления соединен с управляющим входом блока индикации, вход синхронизации которого соединен с выходом синхронизации блока управления, i-й, информационный выход группы выходов блока управления соединен соответственно с информационным входом i-го блока передачи системы, (n+1)-й информационный выход блока управления соединен с информационным входом блока индикации, информационный выход i-го, блока передачи системы соединен с i-м информационным выходом приемопередатчика системы, в каждом i-м, приемопередатчике колеса информационный вход соединен с информационным входом блока приема сигналов колеса, информационный и управляющий выходы которого соединены соответственно с первым информационным и первым управляющим входами блока сопряжения, управляющий вход блока приема сигналов колеса соединен с первым управляющим выходом блока сопряжения, второй управляющий выход блока сопряжения соединен с управляющим входом блока передачи сигналов колеса, первый информационный выход блока сопряжения соединен с информационным входом блока передачи сигналов колеса, выход синхронизации которого соединен со входом синхронизации блока сопряжения, а выход соединен с информационным выходом i-го приемопередатчика колеса, второй информационный вход блока сопряжения соединен с информационным выходом измерительного блока, вход питания которого соединен с первым выходом питания блока сопряжения, второй выход питания которого соединен с входом питания датчика питания, третий информационный вход блока сопряжения соединен с информационным выходом датчика питания, четвертый информационный вход блока сопряжения соединен с информационным выходом блока вычисления давления, третий управляющий выход блока сопряжения соединен с управляющим входом блока вычисления давления, третий выход питания блока сопряжения соединен со входом питания блока вычисления давления, первый и второй потенциальные выходы измерительного блока соединены соответственно с первым и вторым потенциальными входами блока вычисления давления.
колеса принимающая антенна, блок приема сигналов, датчик питания приемопередатчика, измерительный блок, блок вычисления давления, причем принимающая антенна соединена с информационным входом приемопередатчика системы контроля шин автомобиля, первый, второй, третий и четвертый информационные выходы которого соединены соответственно с первой, второй, третьей и четвертой передающими антеннами, информационный выход приемопередатчика i-го, колеса соединен с передающей антенной i-го колеса, а информационный вход приемопередатчика i-го колеса соединен с принимающей антенной i-го колеса, информационный вход приемопередатчика системы соединен с информационным входом блока приема системы, информационный выход которого соединен с информационным входом блока управления, первый, второй, третий управляющие выходы блока управления соединены с первым, вторым и третьим управляющими входами блока приема системы соответственно, четвертый управляющий выход блока управления соединен с управляющим входом блока индикации, вход синхронизации которого соединен с выходом синхронизации блока управления, i-й, информационный выход группы выходов блока управления соединен соответственно с информационным входом i-го блока передачи системы, (n+1)-й информационный выход блока управления соединен с информационным входом блока индикации, информационный выход i-го, блока передачи системы соединен с i-м информационным выходом приемопередатчика системы, в каждом i-м, приемопередатчике колеса информационный вход соединен с информационным входом блока приема сигналов колеса, информационный и управляющий выходы которого соединены соответственно с первым информационным и первым управляющим входами блока сопряжения, управляющий вход блока приема сигналов колеса соединен с первым управляющим выходом блока сопряжения, второй управляющий выход блока сопряжения соединен с управляющим входом блока передачи сигналов колеса, первый информационный выход блока сопряжения соединен с информационным входом блока передачи сигналов колеса, выход синхронизации которого соединен со входом синхронизации блока сопряжения, а выход соединен с информационным выходом i-го приемопередатчика колеса, второй информационный вход блока сопряжения соединен с информационным выходом измерительного блока, вход питания которого соединен с первым выходом питания блока сопряжения, второй выход питания которого соединен с входом питания датчика питания, третий информационный вход блока сопряжения соединен с информационным выходом датчика питания, четвертый информационный вход блока сопряжения соединен с информационным выходом блока вычисления давления, третий управляющий выход блока сопряжения соединен с управляющим входом блока вычисления давления, третий выход питания блока сопряжения соединен со входом питания блока вычисления давления, первый и второй потенциальные выходы измерительного блока соединены соответственно с первым и вторым потенциальными входами блока вычисления давления.
Сущность предлагаемого изобретения поясняется чертежами.
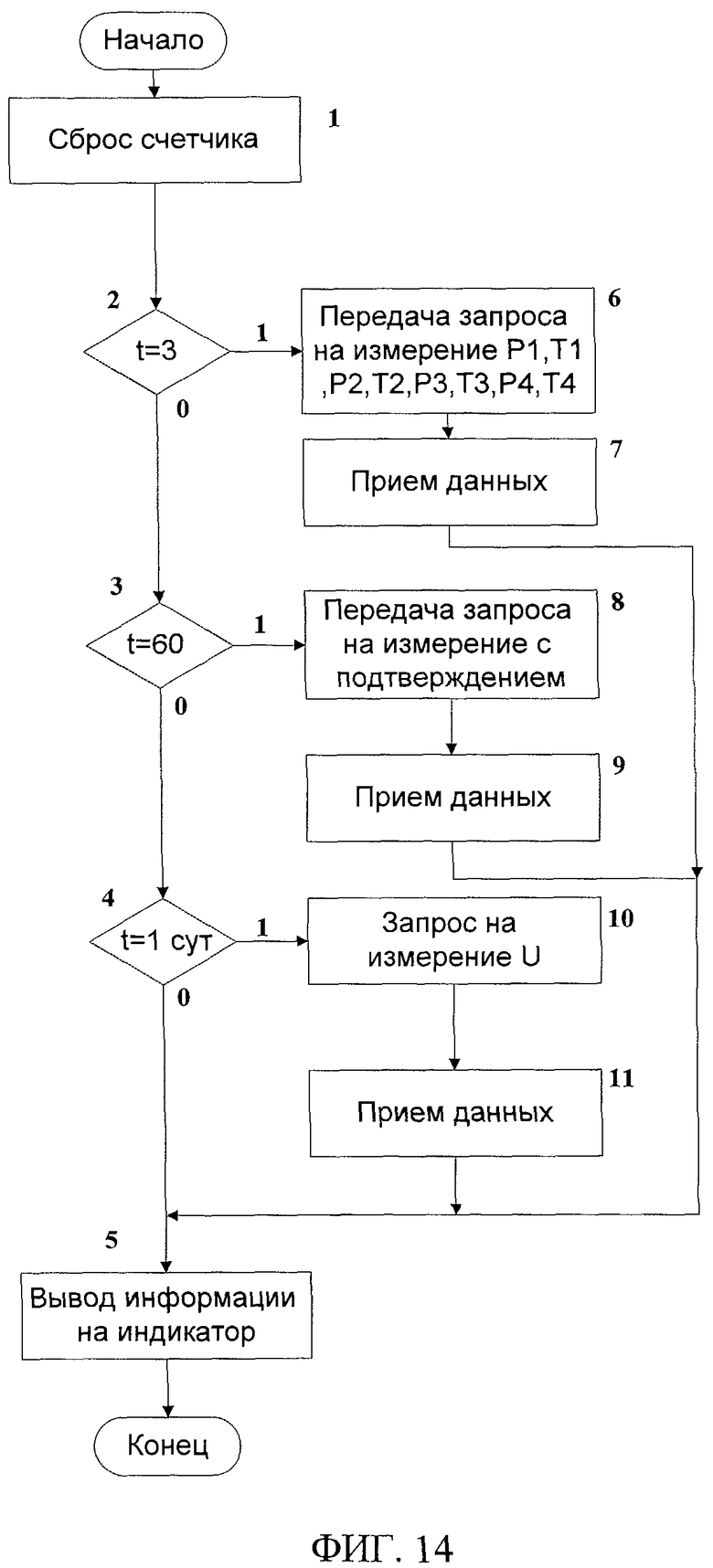
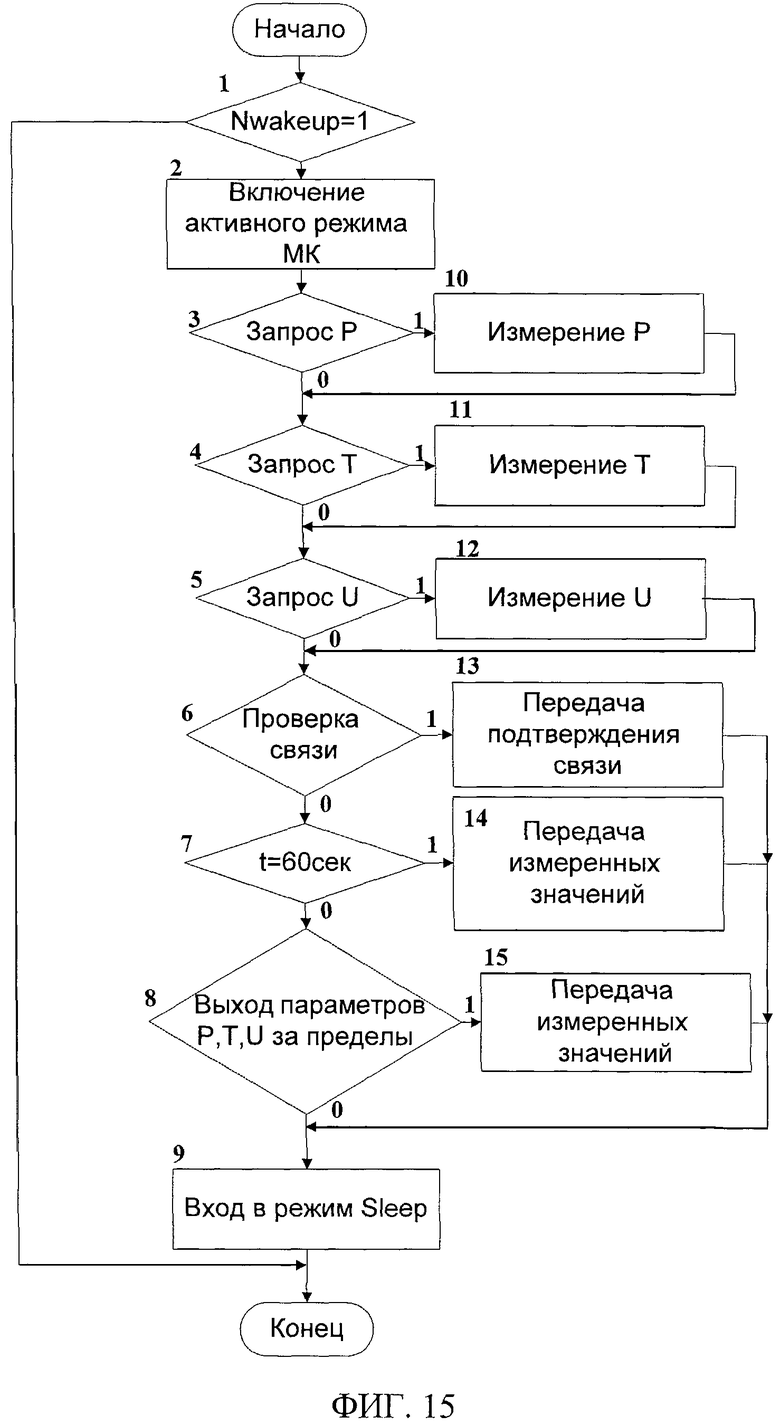
На фиг.1, фиг.2 и фиг.3 приведена структурная схема системы контроля шин автомобиля. На фиг.4 приведена функциональная схема блока приема приемопередатчика системы. На фиг.5 приведена функциональная схема блока управления приемопередатчика системы. На фиг.6 приведена функциональная схема блока индикации приемопередатчика системы. На фиг.7 приведена функциональная схема i-го, блока передачи приемопередатчика системы. На фиг.8 приведена функциональная схема блока приема сигналов колеса приемопередатчика i-го колеса. На фиг.9 приведена функциональная схема блока сопряжения приемопередатчика i-го колеса. На фиг.10 приведена функциональная схема блока передачи сигналов колеса приемопередатчика i-го колеса. На фиг.11 приведена функциональная схема измерительного блока приемопередатчика i-го колеса. На фиг.12 приведена функциональная схема датчика питания приемопередатчика i-го колеса. На фиг.13 приведена функциональная схема блока приемопередатчика i-го колеса. На фиг.14 приведен алгоритм работы блока управления блока приемопередатчика системы. На фиг.15 приведен алгоритм работы устройства сопряжения приемопередатчика i-го колеса.
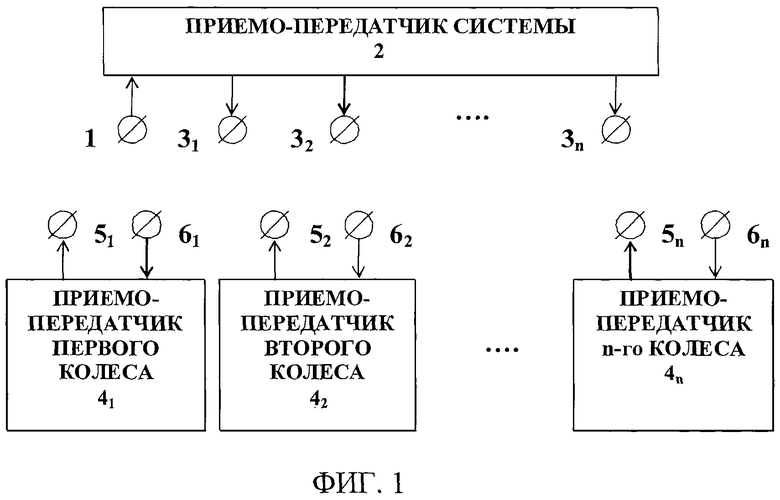
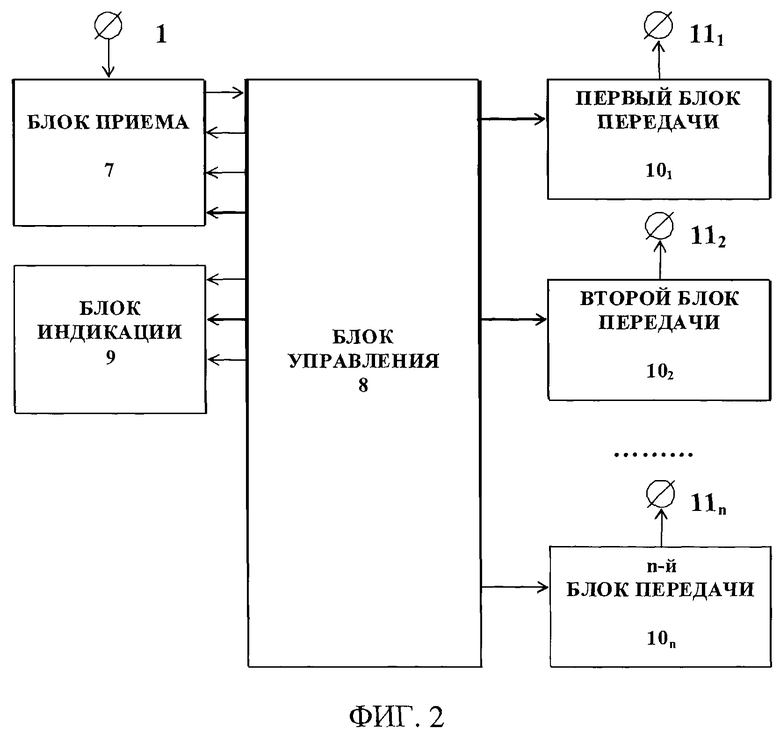
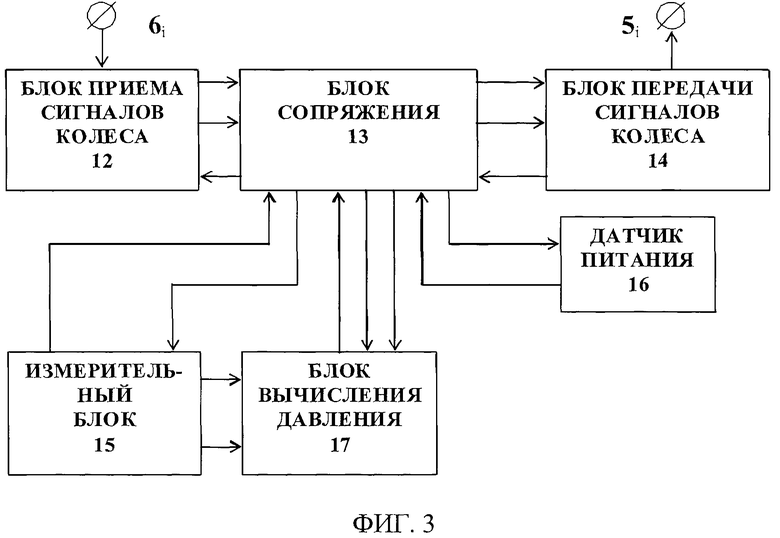
Структурная схема системы контроля шин автомобиля (см. фиг.1, фиг.2 и фиг.3) содержит: 1 - принимающая антенна; 2 - приемопередатчик системы контроля шин автомобиля; 31 - первая передающая антенна; 32 - вторая передающая антенна; 33 - третья передающая антенна; 3n - n-я передающая антенна; 41 приемопередатчик первого колеса; 42 - приемопередатчик второго колеса; 43 - приемопередатчик третьего колеса; 4n - приемопередатчик n-го колеса; 51 - передающая антенна первого колеса; 52 - передающая антенна второго колеса; 53 - передающая антенна третьего колеса; 5n - передающая антенна n-го колеса; 61 - принимающая антенна первого колеса; 62 - принимающая антенна второго колеса; 63 - принимающая антенна третьего колеса; 6n - принимающая антенна n-го колеса; 7 - блок приема приемопередатчика системы 2; 8 - блок управления приемопередатчика системы; 9 - блок индикации приемопередатчика системы; 101 - первый блок передачи приемопередатчика системы 2; 102 - второй блок передачи приемопередатчика системы 2; 103 - третий блок передачи приемопередатчика системы 2; 10n - n-й блок передачи приемопередатчика системы 2; 111 - первый информационный выход группы выходов приемопередатчика системы 2; 112 - второй информационный выход группы выходов приемопередатчика системы 2; 113 - третий информационный выход группы выходов приемопередатчика системы 2; 11n - n-й информационный выход группы выходов приемопередатчика системы 2; 12 - блок приема сигналов i-го колеса; 13 - блок сопряжения i-го колеса; 14 - блок передачи сигналов i-го колеса; 15 - измерительный блок i-го колеса; 16 - датчик питания приемопередатчика первого i-го колеса; 38 - блок вычисления давления приемопередатчика первого i-го колеса.
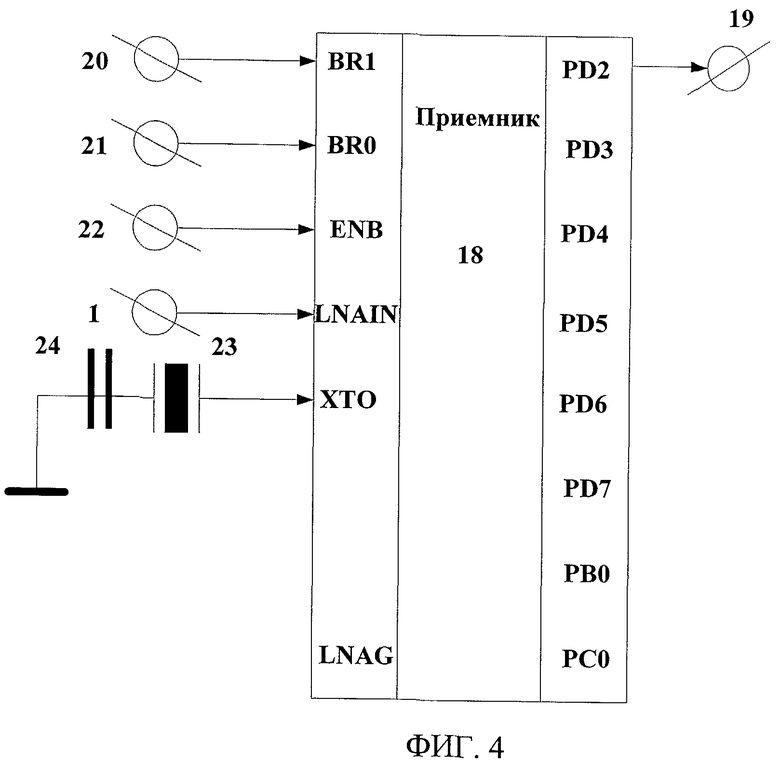
Функциональная схема блока приема приемопередатчика системы (см. фиг.4) содержит: 18 - приемник блока приема приемопередатчика системы; 19 - информационный выход блока приема приемопередатчика системы; 20 - первый управляющий вход блока приема приемопередатчика системы; 21 - второй управляющий вход блока приема приемопередатчика системы; 22 - третий управляющий вход блока приема приемопередатчика системы; 23 - кварцевый резонатор; 24 - конденсатор.
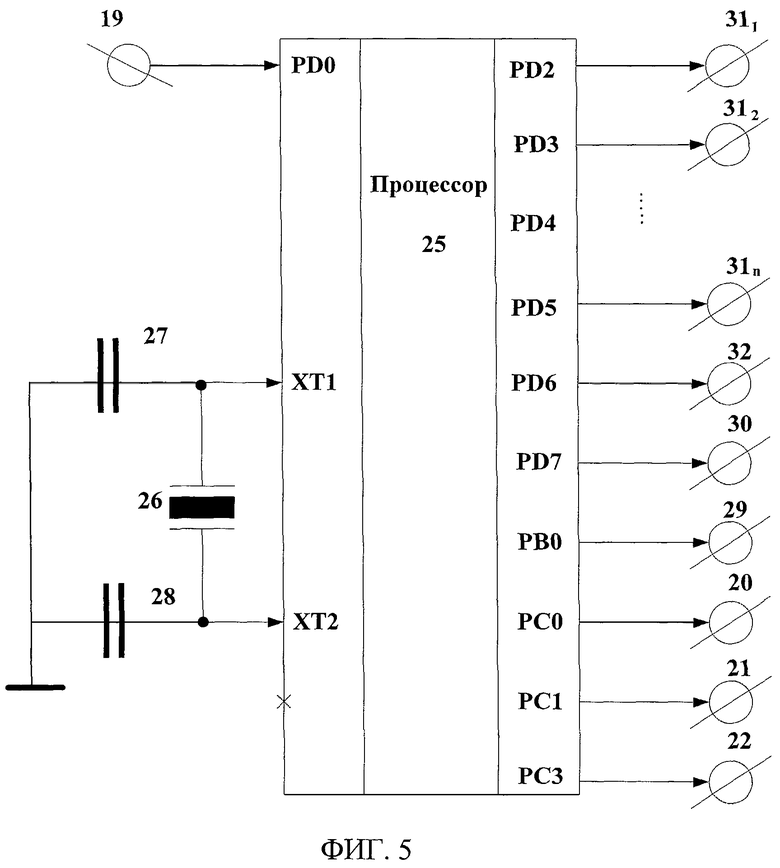
Функциональная схема блока управления приемопередатчика системы (см. фиг.5) содержит: 19 - информационный вход блока управления приемопередатчика системы; 20 - первый управляющий выход блока управления приемопередатчика системы; 21 - второй управляющий выход блока управления приемопередатчика системы; 22 - третий управляющий выход блока управления приемопередатчика системы; 25 - процессор блока управления приемопередатчика системы; 26 - кварцевый резонатор блока управления приемопередатчика системы; 27 - первый конденсатор блока управления приемопередатчика системы; 28 - второй конденсатор блока управления приемопередатчика системы; 29 - четвертый управляющий выход блока управления приемопередатчика системы; 30 - выход синхронизации блока управления приемопередатчика системы; 311 - первый информационный выход блока управления приемопередатчика системы; 312 - второй информационный выход блока управления приемопередатчика системы; 313 - третий информационный выход блока управления приемопередатчика системы; 31n - n-й информационный выход блока управления приемопередатчика системы; 32 - (n+1)-й информационный выход блока управления приемопередатчика системы.
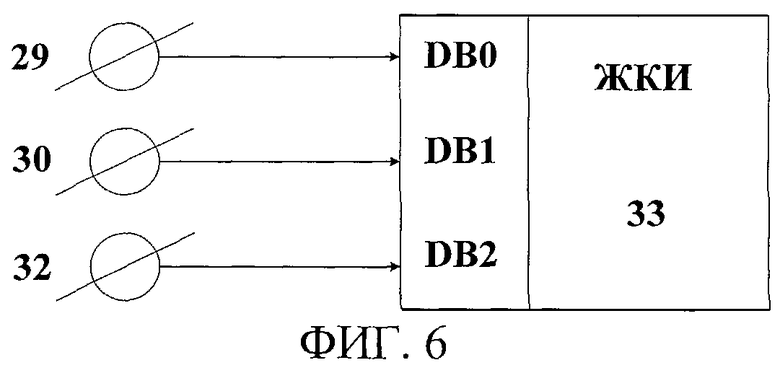
Функциональная схема блока индикации приемопередатчика системы (см. фиг.6) содержит: 29 - управляющий вход блока индикации приемопередатчика системы; 30 - вход синхронизации блока индикации приемопередатчика системы; 32 - информационный вход блока индикации приемопередатчика системы; 33 - жидкокристаллический индикатор.
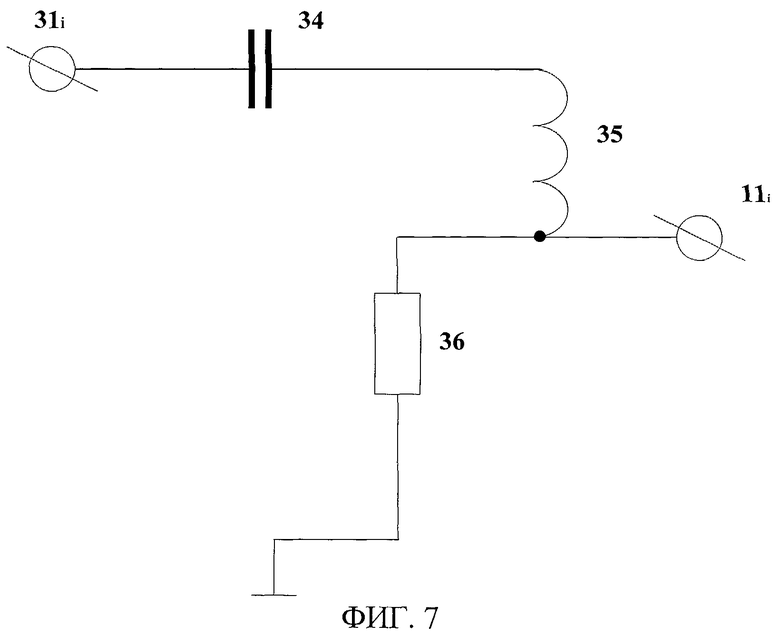
Функциональная схема i-го, блока передачи 10i приемопередатчика системы 2 (см. фиг.7) содержит: 11i - информационный выход i-го, блока передачи приемопередатчика системы 2; 31i - информационный вход i-го  блока передачи приемопередатчика системы; 34 - конденсатор; 35 - катушка индуктивности; 36 - резистор.
блока передачи приемопередатчика системы; 34 - конденсатор; 35 - катушка индуктивности; 36 - резистор.
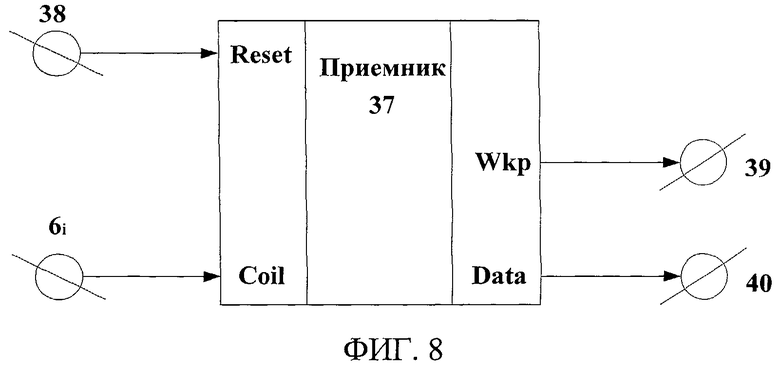
Функциональная схема блока приема сигналов 14 колеса приемопередатчика i-го, колеса (см. фиг.8) содержит: 37 - приемник блока приема сигналов колеса приемопередатчика i-го колеса; 38 - управляющий вход блока приема сигналов колеса приемопередатчика i-го колеса; 39 - управляющий выход блока приема сигналов колеса приемопередатчика i-го колеса; 40 - информационный выход блока приема сигналов колеса приемопередатчика i-го колеса.
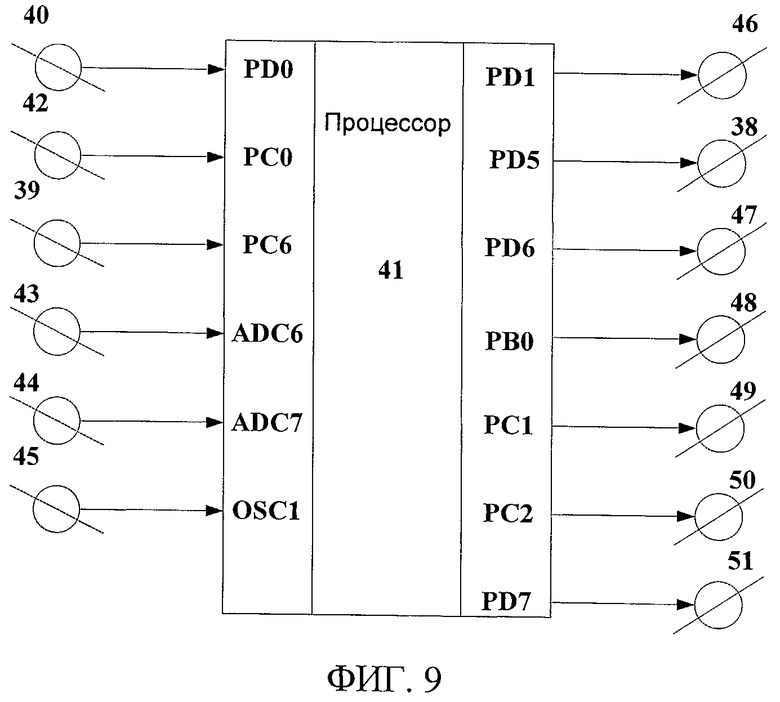
Функциональная схема блока сопряжения 13 приемопередатчика i-го, колеса (см. фиг.9) содержит: 38 - первый управляющий выход блока сопряжения приемопередатчика i-го колеса; 39 - управляющий вход блока сопряжения приемопередатчика i-го колеса; 40 - первый информационный вход блока сопряжения приемопередатчика i-го колеса; 41 - процессор блока сопряжения приемопередатчика i-го колеса; 42 - второй информационный вход блока сопряжения приемопередатчика i-го колеса; 43 - четвертый информационный вход блока сопряжения приемопередатчика i-го колеса; 44 - третий информационный вход блока сопряжения приемопередатчика i-го колеса; 45 - синхронизирующий вход блока сопряжения приемопередатчика i-го колеса; 46 - информационный выход блока сопряжения приемопередатчика i-го колеса; 47 - первый выход питания блока сопряжения приемопередатчика i-го колеса; 48 - третий управляющий выход блока сопряжения приемопередатчика i-го колеса; 49 - второй выход питания блока сопряжения приемопередатчика i-го колеса; 50 - второй управляющий выход блока сопряжения приемопередатчика i-го колеса; 51 - третий выход питания блока сопряжения приемопередатчика i-го колеса.
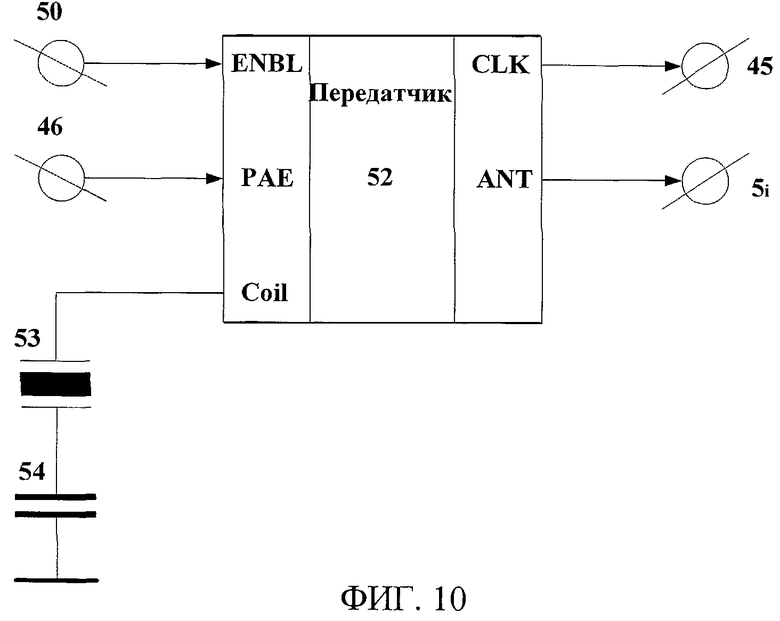
Функциональная схема блока передачи сигналов 12 приемопередатчика i-го, колеса (см. фиг.10) содержит: 5i - информационный выход блока передачи сигналов колеса приемопередатчика i-го колеса; 45 - тактовый выход блока передачи сигналов колеса приемопередатчика i-го колеса; 46 - информационный вход блока передачи сигналов колеса приемопередатчика i-го колеса; 50 - управляющий вход блока передачи сигналов колеса приемопередатчика i-го колеса; 52 - передатчик блока передачи сигналов колеса приемопередатчика i-го колеса; 53 - кварцевый резонатор; 54 - конденсатор.
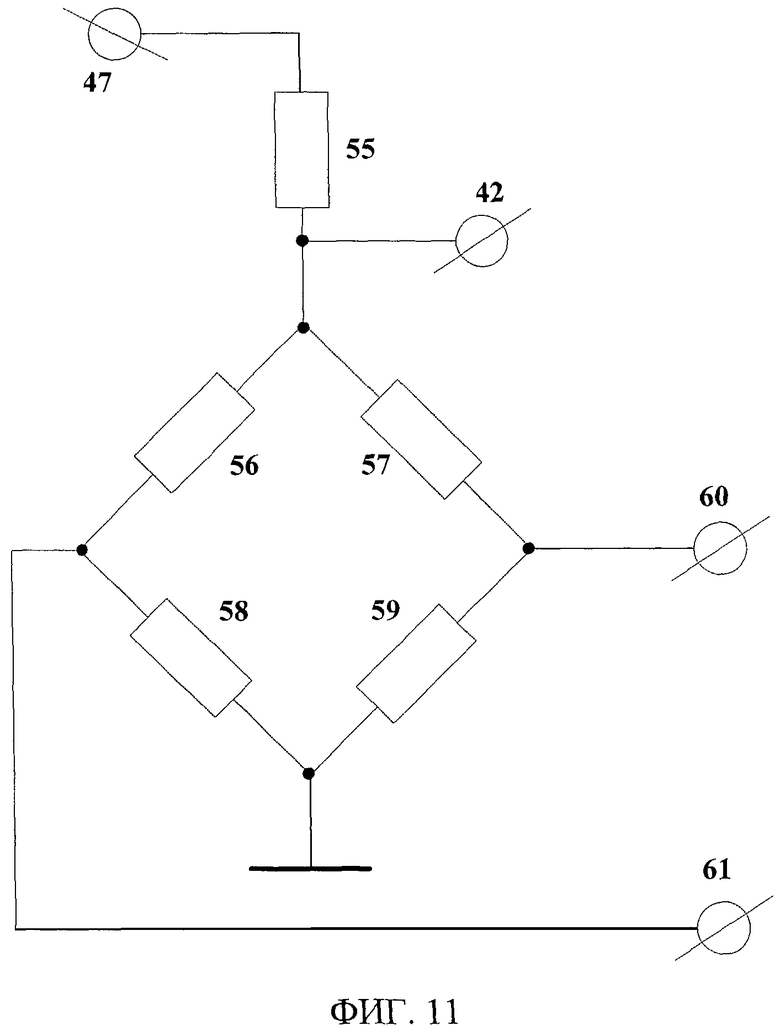
Функциональная схема измерительного блока 15 приемопередатчика i-го, колеса (см. фиг.11) содержит: 42 - информационный выход измерительного блока приемопередатчика i-го колеса; 47 - вход питания измерительного блока приемопередатчика i-го колеса; 55 - первый резистор; 56 - второй резистор; 57 - третий резистор; 58 - четвертый резистор; 59 - пятый резистор; 60 - первый потенциальный выход измерительного блока приемопередатчика i-го колеса; 61 - второй потенциальный выход измерительного блока приемопередатчика i-го колеса.
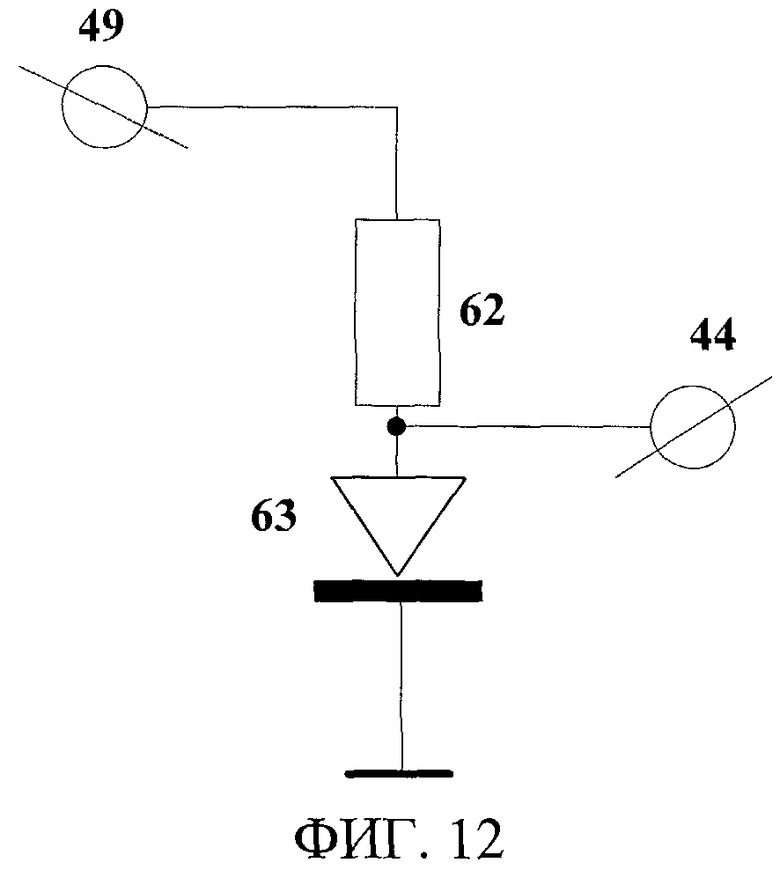
Функциональная схема датчика питания 16 приемопередатчика i-го, колеса (см. фиг.12) содержит: 44 - информационный выход датчика питания приемопередатчика i-го колеса; 49 - вход питания датчика питания приемопередатчика i-го колеса; 62 - резистор; 63 - диод.
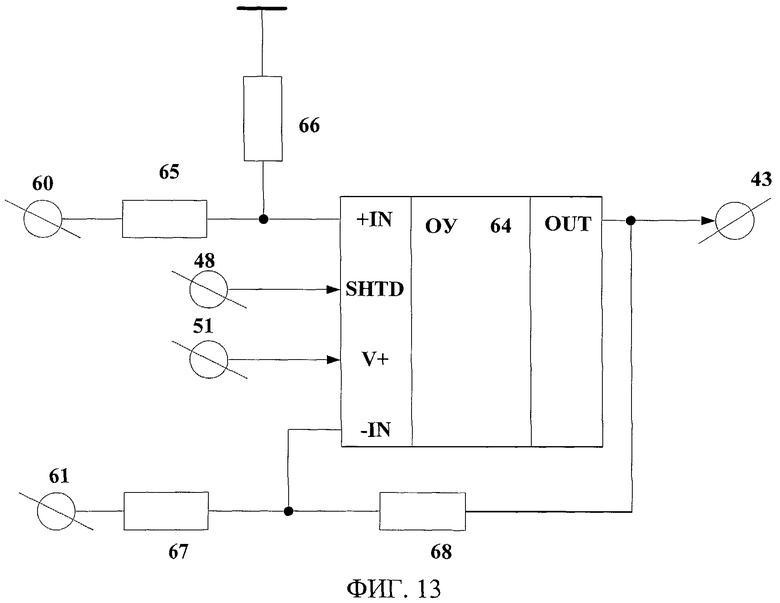
Функциональная схема блока вычисления давления приемопередатчика i-го колеса (см. фиг.13) содержит: 43 - информационный выход блока вычисления давления приемопередатчика i-го колеса; 48 - управляющий вход блока вычисления давления приемопередатчика i-го колеса; 51 - вход питания блока вычисления давления приемопередатчика i-го колеса; 60 - первый потенциальный вход блока вычисления давления приемопередатчика i-го колеса; 61 - второй потенциальный вход блока вычисления давления приемопередатчика i-го колеса; 64 - операционный усилитель; 65 - первый резистор; 66 - второй резистор; 67 - третий резистор; 68 - четвертый резистор.
Элементы системы контроля шин автомобиля взаимосвязаны следующим образом.
Принимающая антенна 1 (см. фиг.1) соединена с информационным входом приемопередатчика 2 системы контроля шин автомобиля, первый, второй, третий и четвертый информационные выходы которого соединены соответственно с первой 31, второй 32, третьей 33 и четвертой 34 передающими антеннами, информационный выход приемопередатчика i-го, колеса 4i соединен с передающей антенной i-го колеса 5i, а информационный вход приемопередатчика i-го колеса 4i соединен с принимающей антенной i-го колеса 6i, информационный вход 1 приемопередатчика системы 2 (см. фиг.2) соединен с информационным входом блока приема системы 7, информационный выход которого соединен с информационным входом блока управления 8, первый, второй, третий управляющие выходы блока управления 8 соединены с первым, вторым и третьим управляющими входами блока приема системы 7 соответственно, четвертый управляющий выход блока управления 8 соединен с управляющим входом блока индикации 9, вход синхронизации которого соединен с выходом синхронизации блока управления 8, i-й, информационный выход группы выходов блока управления 8 соединен соответственно с информационным входом i-го блока передачи системы 10i, (n+1)-й информационный выход блока управления 8 соединен с информационным входом блока индикации 9, информационный выход i-го, блока передачи системы 10i соединен с i-м информационным выходом 11i приемопередатчика системы 2, в каждом i-м, приемопередатчике 4i колеса, информационный вход 6i (см. фиг.3) соединен с информационным входом блока приема сигналов колеса 12, информационный и управляющий выходы которого соединены соответственно с первым информационным и первым управляющим входами блока сопряжения 13, управляющий вход блока приема сигналов колеса 12 соединен с первым управляющим выходом блока сопряжения 13, второй управляющий выход блока сопряжения 13 соединен с управляющим входом блока передачи сигналов колеса 14, первый информационный выход блока сопряжения 13 соединен с информационным входом блока передачи сигналов колеса 14, выход синхронизации которого соединен со входом синхронизации блока сопряжения 13, а выход соединен с информационным выходом 5i i-го приемопередатчика колеса, второй информационный вход блока сопряжения 13 соединен с информационным выходом измерительного блока 15, вход питания которого соединен с первым выходом питания блока сопряжения 13, второй выход питания которого соединен с входом питания датчика питания 16, третий информационный вход блока сопряжения 13 соединен с информационным выходом датчика питания 16, четвертый информационный вход блока сопряжения 13 соединен с информационным выходом блока вычисления давления 17, третий управляющий выход блока сопряжения 13 соединен с управляющим входом блока вычисления давления 17, третий выход питания блока сопряжения 13 соединен со входом питания блока вычисления давления 17, первый и второй потенциальные выходы измерительного блока соединены соответственно с первым и вторым потенциальными входами блока вычисления давления.
В блоке приема системы 7 (см. фиг.4) приемопередатчика системы 2 информационный вход 1 соединен с информационным входом приемника 18, информационный выход которого соединен с информационным выходом 19 блока приема системы 7, первый 20, второй 21 и третий 22 управляющие входы которого соединены с первым, вторым и третьим управляющими входами приемника 18, тактовый вход которого соединен с первым выводом кварцевого генератора 23, второй вывод которого через конденсатор 24 соединен с земляной шиной.
В блоке управления 8 (см. фиг.5) приемопередатчика системы 2 информационный вход 19 соединен с информационным входом процессора 25, первый тактовый вход которого соединен с первым выводом кварцевого генератора 26, а также через первый конденсатор 27 - с первым выводом второго конденсатора 28 и с земляной шиной, второй тактовый вход процессора 25 соединен с вторым выводом кварцевого генератора 26 и вторым выводом второго конденсатора 28, первый, второй, третий и четвертый управляющие выходы процессора 25 соединены соответственно с первым 20, вторым 21, третьим 22 и четвертым 29 управляющими выходами блока управления 8 приемопередатчика системы 2, выход синхронизации процессора 25 соединен с выходом синхронизации 30 блока управления 8, i-й, информационный выход группы информационных выходов процессора 25 соединен с i-м 31i информационными выходами группы блока управления 8 приемопередатчика системы 2, (n+1)-й информационный выход процессора 25 соединен с (n+1)-м информационным выходом блока управления 8 приемопередатчика системы 2, а выход синхронизации процессора 25 соединен с выходом синхронизации 32 блока управления 8 приемопередатчика системы 2.
В блоке индикации 9 (см. фиг.6) приемопередатчика системы 2 управляющий вход 29 соединен с управляющим входом индикатора 33, вход синхронизации которого соединен со входом синхронизации 30 блока индикации 9, а информационный вход соединен с информационным входом 32 блока индикации 9 приемопередатчика системы 2.
В каждом из i-x, блоков передачи системы 10i (см. фиг.7) информационный вход 31i через конденсатор 34 соединен с первым выводом катушки индуктивности 35, второй вывод которой соединен с информационным выходом 11i i-го блока передачи системы 10i и через резистор 36 с земляной шиной.
В блоке приема сигналов колеса 12 (см. фиг.8) приемопередатчика i-го колеса 4i, информационный вход 6i соединен с информационным входом приемника 37, информационный выход 40 которого соединен с информационным выходом блока приема сигналов колеса, а управляющий выход 39 соединен с управляющим выходом блока приема сигналов колеса 12, управляющий вход блока приема колеса 12 соединен с управляющим входом 38 приемника 37.
В блоке сопряжения 13 приемопередатчика i-го колеса 4i,  (см. фиг.9), первый, второй, третий и четвертый информационные входы процессора 41 соединены соответственно с первым 40, вторым 42, третьим 44 и четвертым 43 информационными входами блока сопряжения 13 приемопередатчика i-го колеса 4i, а первый, второй и третий управляющие выходы процессора 41 соединены соответственно с первым 38, вторым 50 и третьим 48 управляющими выходами блока сопряжения 13 приемопередатчика i-го колеса 4i, управляющий вход 39 которого соединен с управляющим входом процессора 41, синхронизирующий вход 45 блока сопряжения 13 соединен с синхронизирующим входом процессора 41, первый информационный выход процессора соединен с информационным выходом блока сопряжения 13, а первый, второй и третий выходы питания процессора 41 соединены соответственно с первым 47, вторым 49 и третьим 51 выходами питания блока сопряжения 13 приемопередатчика i-го колеса 4i, информационный выход 46 которого соединен с информационным выходом процессора 41.
(см. фиг.9), первый, второй, третий и четвертый информационные входы процессора 41 соединены соответственно с первым 40, вторым 42, третьим 44 и четвертым 43 информационными входами блока сопряжения 13 приемопередатчика i-го колеса 4i, а первый, второй и третий управляющие выходы процессора 41 соединены соответственно с первым 38, вторым 50 и третьим 48 управляющими выходами блока сопряжения 13 приемопередатчика i-го колеса 4i, управляющий вход 39 которого соединен с управляющим входом процессора 41, синхронизирующий вход 45 блока сопряжения 13 соединен с синхронизирующим входом процессора 41, первый информационный выход процессора соединен с информационным выходом блока сопряжения 13, а первый, второй и третий выходы питания процессора 41 соединены соответственно с первым 47, вторым 49 и третьим 51 выходами питания блока сопряжения 13 приемопередатчика i-го колеса 4i, информационный выход 46 которого соединен с информационным выходом процессора 41.
В блоке передачи сигналов колеса 14 приемопередатчика i-го колеса (см. фиг.10) управляющий вход 50 соединен с управляющим входом передатчика 52, информационный вход 46 соединен с информационным входом передатчика 52, синхронизирующий выход 45 которого соединен с синхронизирующим выходом блока передачи сигналов колеса 14, а информационный выход соединен с информационным выходом блока передачи колеса 14, синхронизирующий вход передатчика 52 соединен с первым выводом кварцевого резонатора 53, второй вывод которого соединен через конденсатор 54 с земляной шиной.
В измерительном блоке 15 (см. фиг.11) вход питания 47 соединен с первым выводом первого резистора 55, второй вывод которого соединен с информационным выводом 42 измерительного блока 15, с первым выводом второго резистора 56 и с первым выводом третьего резистора 57, второй вывод второго резистора 56 соединен с первым выводом четвертого резистора 91 и со вторым потенциальным выходом 61 измерительного блока 15, второй вывод четвертого резистора 58 и первый вывод пятого резистора 59 соединены с земляной шиной, а второй вывод пятого резистора 59 и второй вывод третьего резистора 57 соединены с первым потенциальным выходом измерительного блока 15.
В датчике питания 16 (см. фиг.12) вход питания 49 соединен с первым выводом резистора 62, второй вывод которого соединен с информационным выходом 44 датчика питания 16 и с первым выводом диода 63, второй вывод которого соединен с земляной шиной.
В блоке вычисления давления 17 (см. фиг.13) первый потенциальный вход 60 через первый резистор 65 соединен с первым потенциальным входом операционного усилителя 64 и с первым выводом второго резистора 66, второй вывод которого соединен с земляной шиной, второй потенциальный вывод 61 блока вычисления давления 17 соединен через третий резистор 67 со вторым потенциальным входом операционного усилителя 64 и с первым выводом четвертого резистора 68, второй вывод которого соединен с информационным выводом операционного усилителя 64 и с информационным выводом блока вычисления давления 43, управляющий вход 48 блока вычисления давления 17 соединен с управляющим входом операционного усилителя 64, вход питания которого соединен с входом питания 51 блока вычисления давления 17.
Работает система контроля шин автомобиля следующим образом.
После включения питания, происходящего при включенном замке зажигания автомобиля, происходит включение приемопередатчика системы 2 (см. фиг.1), который формирует сигнал запроса для измерения параметров шины колеса, который через передающие антенны 3i подается на принимающие антенны 6i приемопередатчиков 4i. Для этого в приемопередатчике системы 2 (см. фиг.2) блок управления 8 формирует на i-x, информационных выходах группы выходов сигналы, подаваемые соответственно на информационные входы i-x блоков передачи системы 10i, сигналы запроса с информационных выходов которых подаются на соответствующие i-e информационные выходы 11i приемопередатчика системы 2 и на передающие антенны 3i.
В каждом из i-x приемопередатчиков 4i (см. фиг.3) сигнал запроса принимается на информационный вход 6i блоком приема сигналов колеса 12, в котором он дешифрируется. Блок приема сигналов колеса 12, приняв сигнал запроса, формирует сигнал инициализации процессора 41 блока сопряжения 13, причем сигнал инициализации подается с управляющего выхода блока приема сигналов колеса 12 на первый управляющий вход блока сопряжения 13. Также блок приема сигналов колеса 12, приняв сигнал запроса, формирует составной информационный сигнал, который с информационного выхода блока 12 подается на первый информационный вход блока сопряжения 13. Данный составной информационный сигнал несет информацию о тех параметрах колеса, которые подлежат передаче, а также о необходимости передачи этой информации в текущий сеанс связи приемопередатчика системы 2 и приемопередатчиков колеса 4.
Если принятый блоком сопряжения 13 информационный сигнал несет информацию о режиме измерения давления, то блок сопряжения 13 с первого выхода питания подает соответствующий сигнал на вход питания измерительного блока 15, а также блок сопряжения 13 подает сигнал с третьего выхода питания сигнал на вход питания блока вычисления давления 17 и с третьего управляющего выхода сигнал активизации работы блока вычисления давления 17. Затем блок вычисления давления 17 по значениям сигналов с первого и второго потенциальных входов формирует сигнал, несущий информацию о величине давления. Этот сигнал с информационного выхода блок вычисления давления 17 подается на четвертый информационный вход блока сопряжения 13.
Если принятый блоком сопряжения 13 информационный сигнал несет информацию о режиме измерения температуры, то блок сопряжения 13 с первого выхода питания подает сигнал на вход питания измерительного блока 15.
Затем измерительный блок 15 со своего информационного выхода подает сигнал, несущий информацию о величине температуры, на второй информационный вход блока сопряжения 13.
Если принятый блоком сопряжения 13 информационный сигнал несет информацию о режиме измерения питания приемопередатчика колеса 4, то блок сопряжения 13 со второго выхода питания подает сигнал на вход датчика питания 16. Затем датчик питания 16 со своего информационного выхода подает сигнал, несущий информацию о величине напряжения элемента питания, на третий информационный вход блока сопряжения 13.
Если составной информационный сигнал определяет необходимость передачи информации о параметрах колеса в данный сеанс связи, то блок сопряжения 13 формирует для блока передачи сигналов колеса 14 управляющий сигнал, определяющий вид работы блока передачи: тип модуляции, частоту передачи. Этот сигнал со второго управляющего выхода блока сопряжения 13 передается на управляющий вход блока передачи сигналов колеса 14, после чего с первого информационного выхода блока сопряжения 13 на информационный вход блока передачи сигналов колеса 14 передается информационная последовательность результатов измерения. При этом с выхода синхронизации блока передачи сигналов колеса 14 на вход синхронизации блока сопряжения 13 подаются сигналы, определяющие моменты времени передачи информационной последовательности.
Информационная последовательность результатов измерения передается блоком передачи сигналов колеса 14 на передающую антенну i-го колеса 5i, которая принимается принимающей антенной 1.
После окончания текущего сеанса связи приемопередатчика системы 2 и приемопередатчика колеса 4 блок спряжения 13 формирует управляющий сигнал, который с первого управляющего выхода блока 13 подается на управляющий вход блока приема сигналов колеса 12 и переводит блок 12 в режим ожидания следующего сеанса связи.
Информация, поступившая с принимающей антенны 1 в приемопередатчик системы 2, передается на вход блока приема сигналов 7. После дешифрации в блоке 7 данная информация передается с информационного выхода блока 7 на информационный вход блока управления 8. В блоке управления 8 полученный информационный сигнал обрабатывается процессором 25 и передается в блок индикации 9. Для этого формируется передача с (n+1)-го информационного выхода блока управления 8 на информационный вход блока индикации 9 одновременно с передачей синхросигналов с синхронизирующего выхода блока управления 8 на синхронизирующий вход блока индикации 9. По окончанию передачи блок управления 8 формирует управляющий сигнал окончания передачи с четвертого управляющего выхода на вход управления блока индикации 9.
Данные сеансы связи повторяются последовательно для каждого колеса, спустя заданный промежуток времени возобновляется сеанс связи с приемопередатчиком первого колеса 41 и так далее до приемопередатчика n-го колеса.
В блоке управления 8 приемопередатчика системы 2 (см. фиг.5) после включения зажигания автомобиля процессор 25 формирует сигнал запроса, который через i-й информационный выход поступает на выход блока управления 31i. После передачи сигнала запроса в блоке управления 8 формируются сигналы управления для организации режима приема информации. Данные сигналы поступают с первого, второго и третьего управляющего выходов процессора 25 на первый 20, второй 21 и третий 22 управляющие выходы блока управления 8. Затем блок управления 8 ожидает сигнал с данными параметров колеса с информационного входа 19.
Полученный сигнал поступает на информационный вход процессора 25, обрабатывается, и затем процессор формирует сигналы для вывода информации на индикатор, а именно с (n+1)-го информационного выхода процессора 25 поступает сигнал на информационный выход 32, с синхронизирующего выхода процессора 25 поступает сигнал на выход 30 и с 4-го управляющего выхода процессора 25 поступает сигнал на управляющий выход 29, который характеризует окончание передачи данных в индикатор. Цепь, состоящая из конденсаторов 27, 28 и кварцевого резонатора 26, формирует тактовые импульсы, которые поступают соответственно на синхронизирующие входы процессора 25.
В блоке индикации 9 (см. фиг.6) данные поступают с информационного входа 32 на информационный вход жидкокристаллического индикатора 33. Данные в индикатор поступают одновременно с синхроимпульсами, которые передаются с синхронизирующего входа 30 на синхронизирующий вход жидкокристаллического индикатора 33. Для вывода поступивших данных на экран жидкокристаллического индикатора 33 с управляющего входа 29 на управляющий вход жидкокристаллического индикатора 33 передается соответствующий сигнал.
В блоке передачи 10i (см. фиг.7) сигнал запроса с информационного входа 31i поступает в колебательный контур, который сформирован на конденсаторе 34, катушке индуктивности 35 и резисторе 36, и служит для передачи низкочастотного сигнала запроса для измерения параметров шины колеса. Так как катушка индуктивности 35 фактически выполняет назначение передающей антенны, то данный сигнал подается на информационный выход 11i и передается в приемопередатчик системы 2.
Сигнал, принятый антенной 6i, поступает через информационный вход 31i блока приема сигналов колеса 12 (см. фиг.8) на информационный вход приемника 37. В приемнике сигнал дешифрируется, и далее приемник формирует сигнал инициализации процессора 41, который подается на управляющий выход 39 блока приема сигналов 12. Одновременно приемник формирует составной информационный сигнал, который подается на информационный выход 40 блока приема сигналов 12.
Сигналы, сформированные приемником 37, поступают соответственно на входы блока сопряжения 13 (см. фиг.9), причем сигнал инициализации через управляющий вход 39 - на управляющий вход процессора 41, а составной информационный сигал через первый информационный вход 40 блока сопряжения 13 - на первый информационный вход процессора 41.
Если принятый процессором 41 информационный сигнал несет информацию о режиме измерения давления, то процессор с первого выхода питания подает соответствующий сигнал на выход питания 47 блока сопряжения 13. Также процессор 41 подает сигнал с третьего выхода питания на выход питания блока сопряжения 13 и с третьего управляющего выхода - сигнал активации блока вычисления давления 17 на третий управляющий выход 48 блока сопряжения 13.
Если принятый процессором 41 сигнал несет информацию о режиме измерения температуры, то процессор подает на первый выход питания сигнал, который соответствует данному режиму. Сигнал поступает на первый выход питания 47 блока сопряжения 13.
Если принятый процессором 41 сигнал несет информацию о режиме измерения питания, то процессор 41 формирует на втором выходе питания потенциал, который подается на второй выход питания 49 блока сопряжения 13.
Если составной информационный сигнал определяет необходимость передачи информации о параметрах колеса в данный сеанс связи, то процессор формирует на втором управляющем выходе сигнал, определяющий инициализацию и параметры работы блока передачи сигналов колеса 14. Сигнал поступает на второй управляющий выход 50 блока сопряжения 13, после чего процессор 41 формирует сигнал с данными об измеренных параметрах, который с информационного выхода процессора 41 поступает на информационный выход 46 блока сопряжения 13. С синхронизирующего входа 45 поступает синхросигнал в процессор 41, данный сигнал является тактовым сигналом во время работы процессора 41 в режиме передачи информации в блок передачи сигналов колеса 14.
В блоке передачи сигналов колеса 14 (см. фиг.10) сигнал инициализации и параметров передачи, пришедший на управляющий вход 50 блока передачи сигналов колеса 14, поступает на управляющий вход передатчика 52, тем самым переводит передатчик в нужный режим. Затем информация, поступившая на информационный вход 46, поступает в на информационный вход передатчика 52, в котором обрабатывается и передается с информационного выхода передатчика 52 на информационный выход 5i блока передачи сигналов 14.
Цепь, состоящая из конденсатора 54 и кварцевого резонатора 53, формирует синхроимпульсы, поступающие на синхронизирующий вход передатчика 52. Данный тактовый сигнал используется при формировании передатчиком 52 информационного сигнала. Также синхросигнал с синхронизирующего выхода передатчика 52 поступает на синхронизирующий выход 45 блока передачи сигналов колеса 14. Данный сигнал служит тактовым сигналом при формировании выходного информационного сигнала процессором 41 блока передачи сигналов колеса 14 в режиме передачи.
Измерительный блок 15 (см. фиг.11) может в зависимости от входящих сигналов работать в двух режимах: режим измерения давления, режим измерения температуры. Данные режимы определяются в зависимости от входящего сигнала на входе питания 47. Подача питания резистивного моста (резисторы 56, 57, 58, 59) организована с входа питания 47 в режиме измерения температуры, а в режиме измерения давления подача питания производится со второго информационного входа 42.
В режиме измерения давления результат разбаланса резистивного моста отображается в изменениях потенциалов на первом 60 и втором 61 потенциальных выходах измерительного блока 15.
В датчике питания 16 (см. фиг.12) при подаче напряжения на вход питания 49 схема, состоящая из резистора 62 и диода 63, будет формировать выходной сигнал на информационном выходе 44, значение которого отражает напряжение элемента питания.
В блоке вычисления давления 17 (см. фиг.13) при поступлении сигналов на первый потенциальный 60 и второй потенциальный 61 входы формируется сигнал активации работы операционного усилителя 64, который поступает с управляющего входа 48 на управляющий вход операционного усилителя 64. В это же время со входа питания 51 поступает сигнал на вход питания операционного усилителя 64, после чего сигналы с первого потенциального и второго потенциального входов поступают на потенциальные входы операционного усилителя 64 через резисторы 65 и 67 соответственно. На информационном выходе операционного усилителя формируется сигнал, который поступает на информационный выход 43. Данный сигнал отражает информацию об измеренном давлении.
Технико-экономическая эффективность предлагаемой системы контроля шин автомобиля по отношению к известному устройству для сигнализации о падении давления воздуха в шине транспортного средства (см. патент РФ №2103184, МПК6 B60C 23/02, опубликованный 27.01.1998, автора Исаева И.М.) оценивается по результатам эффективного анализа состояний шин автомобиля, уменьшающего вероятность возникновения аварийных ситуаций, расход топлива и увеличивающего срок службы шин автомобиля.
Система контроля шин автомобиля может быть реализована с применением процессоров на элементах любых отечественных и зарубежных серий, с применением современных материалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОНТРОЛЯ ДИСТАНЦИЙ АВТОМОБИЛЯ ДО ПРЕПЯТСТВИЙ | 2010 |
|
RU2425765C1 |
| МУЛЬТИЭЛЕКТРОДНОЕ УСТРОЙСТВО ДЛЯ ЭЛЕКТРОСТИМУЛЯЦИИ | 2003 |
|
RU2311207C2 |
| АДАПТИВНЫЙ ЭЛЕКТРОСТИМУЛЯТОР | 2001 |
|
RU2211712C2 |
| АДАПТИВНЫЙ ЭЛЕКТРОСТИМУЛЯТОР С ВИРТУАЛЬНЫМ ЭЛЕКТРОДОМ | 2000 |
|
RU2198695C2 |
| АДАПТИВНЫЙ ЭЛЕКТРОСТИМУЛЯТОР | 1998 |
|
RU2155614C2 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| АДАПТИВНЫЙ ЭЛЕКТРОСТИМУЛЯТОР | 2007 |
|
RU2345798C2 |
| ПЕРЕНОСНАЯ БАЗОВАЯ СТАНЦИЯ СТАНДАРТА ТЕТРА | 2017 |
|
RU2654124C1 |
| СИСТЕМА РАДИОСВЯЗИ С ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2023 |
|
RU2817401C1 |
| МОБИЛЬНЫЙ УЗЕЛ СПУТНИКОВОЙ СВЯЗИ | 2007 |
|
RU2342787C1 |
Изобретение относится к технике контроля состояния шин автомобиля. В предложенной системе применены интегрированные датчики давления и температуры, а также двунаправленный канал связи. Алгоритм функционирования микропроцессорной системы контроля давления и температуры позволяет как в автоматическом режиме, так и по запросу водителя транспортного средства осуществлять измерения контролируемых параметров и передавать данные в блок индикации. Система характеризуется расширенными функциональными возможностями и обеспечивает снижение вероятности возникновения аварийных ситуаций и расхода топлива, а также увеличение срока службы шин автомобиля. 15 ил.
Система контроля шин автомобиля, содержащая блок приема системы, принимающую антенну и блок индикации, а также блок передачи сигналов колеса, передающую антенну и блок сопряжения, отличающаяся тем, что в нее дополнительно введены n передающих антенн для приемопередатчика системы контроля шин автомобиля, n приемопередатчиков - для каждого из n колес, блок управления и n блоков передачи - для приемопередатчика системы, принимающая антенна, блок приема сигналов, датчик питания приемопередатчика, измерительный блок и блок вычисления давления - для приемопередатчика i-го,  , колеса, причем принимающая антенна соединена с информационным входом приемопередатчика системы контроля шин автомобиля, первый, второй, третий и четвертый информационные выходы которого соединены с соответственно с первой, второй, третьей и четвертой передающими антеннами, информационный выход приемопередатчика i-го,
, колеса, причем принимающая антенна соединена с информационным входом приемопередатчика системы контроля шин автомобиля, первый, второй, третий и четвертый информационные выходы которого соединены с соответственно с первой, второй, третьей и четвертой передающими антеннами, информационный выход приемопередатчика i-го,  , колеса соединен с передающей антенной i-го колеса, а информационный вход приемопередатчика i-го колеса соединен с принимающей антенной i-го колеса, информационный вход приемопередатчика системы соединен с информационным входом блока приема системы, информационный выход которого соединен с информационным входом блока управления, первый, второй, третий управляющие выходы блока управления соединены с первым, вторым и третьим управляющими входами блока приема системы соответственно, четвертый управляющий выход блока управления соединен с управляющим входом блока индикации, вход синхронизации которого соединен с выходом синхронизации блока управления, i-й, , информационный выход группы выходов блока управления соединен соответственно с информационным входом i-го блока передачи системы, (n+1)-й информационный выход блока управления соединен с информационным входом блока индикации, информационный выход i-го, , блока передачи системы соединен с i-м информационным выходом приемопередатчика системы, в каждом i-м, , приемопередатчике колеса, информационный вход соединен с информационным входом блока приема сигналов колеса, информационный и управляющий выходы которого соединены соответственно с первым информационным и первым управляющим входами блока сопряжения, управляющий вход блока приема сигналов колеса соединен с первым управляющим выходом блока сопряжения, второй управляющий выход блока сопряжения соединен с управляющим входом блока передачи сигналов колеса, первый информационный выход блока сопряжения соединен с информационным входом блока передачи сигналов колеса, выход синхронизации которого соединен со входом синхронизации блока сопряжения, а выход соединен с информационным выходом i-го приемопередатчика колеса, второй информационный вход блока сопряжения соединен с информационным выходом измерительного блока, вход питания которого соединен с первым выходом питания блока сопряжения, второй выход питания которого соединен с входом питания датчика питания, третий информационный вход блока сопряжения соединен с информационным выходом датчика питания, четвертый информационный вход блока сопряжения соединен с информационным выходом блока вычисления давления, третий управляющий выход блока сопряжения соединен с управляющим входом блока вычисления давления, третий выход питания блока сопряжения соединен со входом питания блока вычисления давления, первый и второй потенциальные выходы измерительного блока соединены соответственно с первым и вторым потенциальными входами блока вычисления давления.
, колеса соединен с передающей антенной i-го колеса, а информационный вход приемопередатчика i-го колеса соединен с принимающей антенной i-го колеса, информационный вход приемопередатчика системы соединен с информационным входом блока приема системы, информационный выход которого соединен с информационным входом блока управления, первый, второй, третий управляющие выходы блока управления соединены с первым, вторым и третьим управляющими входами блока приема системы соответственно, четвертый управляющий выход блока управления соединен с управляющим входом блока индикации, вход синхронизации которого соединен с выходом синхронизации блока управления, i-й, , информационный выход группы выходов блока управления соединен соответственно с информационным входом i-го блока передачи системы, (n+1)-й информационный выход блока управления соединен с информационным входом блока индикации, информационный выход i-го, , блока передачи системы соединен с i-м информационным выходом приемопередатчика системы, в каждом i-м, , приемопередатчике колеса, информационный вход соединен с информационным входом блока приема сигналов колеса, информационный и управляющий выходы которого соединены соответственно с первым информационным и первым управляющим входами блока сопряжения, управляющий вход блока приема сигналов колеса соединен с первым управляющим выходом блока сопряжения, второй управляющий выход блока сопряжения соединен с управляющим входом блока передачи сигналов колеса, первый информационный выход блока сопряжения соединен с информационным входом блока передачи сигналов колеса, выход синхронизации которого соединен со входом синхронизации блока сопряжения, а выход соединен с информационным выходом i-го приемопередатчика колеса, второй информационный вход блока сопряжения соединен с информационным выходом измерительного блока, вход питания которого соединен с первым выходом питания блока сопряжения, второй выход питания которого соединен с входом питания датчика питания, третий информационный вход блока сопряжения соединен с информационным выходом датчика питания, четвертый информационный вход блока сопряжения соединен с информационным выходом блока вычисления давления, третий управляющий выход блока сопряжения соединен с управляющим входом блока вычисления давления, третий выход питания блока сопряжения соединен со входом питания блока вычисления давления, первый и второй потенциальные выходы измерительного блока соединены соответственно с первым и вторым потенциальными входами блока вычисления давления.
| УСТРОЙСТВО ДЛЯ СИГНАЛИЗАЦИИ О ПАДЕНИИ ДАВЛЕНИЯ ВОЗДУХА В ПНЕВМАТИЧЕСКОЙ ШИНЕ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2103184C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЖЕСТКОСТИ ПНЕВМАТИЧЕСКОЙ ШИНЫ | 1992 |
|
RU2035708C1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ЖЕСТКОСТИ ПНЕВМАТИЧЕСКОЙ ШИНЫ | 1992 |
|
RU2042936C1 |
| RU 2004113658 A, 10.02.2005. | |||

