Предлагаемое изобретение относится к автомобильному приборостроению, в частности к электронным устройствам автомобиля, позволяющим контролировать расстояние от переднего и заднего бамперов автомобиля до различных препятствий в процессе движения (включая парковку автомобиля).
Известно устройство обнаружения для выполнения парковки (см. международный патент RU 94040377 от 20.12.1997, М.кл. 6 G08G 1/00, автор Мауро Дель Синьоре), содержащее выходной блок, блок звуковой индикации, причем выходной блок выполнен как приемопередатчик радиочастотного сигнала, соединенный с блоком звуковой индикации и лампой индикации.
Недостатки известного устройства состоят в том, что устройство не позволяет контролировать расстояния до препятствий, находящихся с двух сторон автомобиля, устанавливать режимы движения и контроля, максимальную контролируемую дистанцию до препятствия, регулировать чувствительность приемной части, регулировать мощность излучаемого сигнала, индицировать точное расстояние до препятствия, обнаруживать препятствия из материалов с низкой электрической проводимостью (стекло, керамика, пластик с чистыми поверхностями), обнаруживать препятствие при постоянном расстоянии до него (только при изменении расстояния).
Признаками аналога, совпадающими с признаками заявляемого технического решения, являются выходной блок, блок звуковой индикации.
Причины, препятствующие достижению требуемого технического результата, состоят в особенностях структурной реализации известного устройства, направленных только на выявление препятствия в одном направлении движения, что ограничивает его функциональные возможности.
Известно устройство для контроля безопасной дистанции (см. патент России RU 2149461 от 20.05.2000, М.кл. 7 G08G 1/09, заявитель: Военный инженерно-космический университет им. А.Ф.Можайского, авторы Кузьменко М.Н.; Чадаев А.Д.; Шабаков Е.И.), которое содержит последовательно соединенные детектор и формирователь импульсов, генератор, два счетчика, решающий блок, выход, соединенный с входом сигнализатора, два объектива, второй детектор, делитель частоты, два регистра памяти, второй формирователь импульсов, причем каждый детектор выполнен в виде линейного прибора с зарядовой связью, состоящего из n числа светочувствительных ячеек, ориентированных вдоль одной линии, и размещен в задней фокальной плоскости соответственно объектива, оптические оси которых разнесены на базовое расстояние L и ориентированы параллельно направлению движения автомобиля - носителя аппаратуры, а выход каждого линейного прибора с зарядовой связью через соответствующий формирователь импульсов подключен к входу управления счетом соответствующего счетчика, выходом соединенного с соответствующим входом решающего блока через соответствующий регистр памяти, информационный вход каждого из которых через делитель частоты подключен к выходу генератора параллельно с управляющим входом каждого линейного прибора с зарядовой связью и информационным входом каждого счетчика, при этом генератор выполнен в виде генератора сдвиговых импульсов, а решающий блок выполнен в виде блока вычисления дистанции на основе данных о направлении прихода фиксируемого излучения.
Недостаток известного устройства состоит в том, что оно контролирует дистанцию до препятствия только в одном направлении - в потоке до впередиидущего транспортного средства, у которого зажжены задние габаритные или стоп сигналы, и не позволяет контролировать расстояния в процессе парковки до препятствий, находящихся с двух сторон автомобиля, а также устройство не позволяет устанавливать режимы движения и контроля.
Признаком аналога, совпадающим с признаками заявляемого технического решения, является генератор.
Причины, препятствующие достижению требуемого технического результата, состоят в особенностях структурной реализации известного устройства, направленных только на выявление препятствия в одном направлении движения и не позволяющих осуществлять задание режимов контроля, что ограничивает его функциональные возможности.
Наиболее близким к предлагаемому устройству контроля дистанций автомобиля до препятствий по совокупности функциональных и конструктивных признаков является устройство для автомобиля (см. патент RU №2380725 от 10.09.2008, М.кл. 6 G01S 15/18, заявитель: ФОЛЬКСВАГЕН АКЦИЕНГЕЗЕЛЛЬШАФТ, авторы Миларк Андреас; Рольфе Михель; Хлоста Свен), содержащее, по меньшей мере, один датчик расстояния для измерения в основном бокового расстояния между автомобилем и объектами и блок управления датчиком расстояния, при этом датчик расстояния во время активирования передает измерительные сигналы и в течение времени приема при измерении принимает отраженный, по меньшей мере, от одного объекта измерительный сигнал, также предусмотрено изменение посредством блока управления времени приема при измерении расстояния.
К недостатку известного устройства следует отнести то, что устройство позволяет обнаруживать препятствия с боковых сторон, измеряет расстояния между рядом находящимися автомобилями с целью определения возможности парковки автомобиля, выдает эту информацию водителю, но не имеет управляющих входов от органов управления автомобиля, что не позволяет в динамике движения контролировать процесс парковки автомобиля.
Признаками прототипа, совпадающими с признаками заявляемого технического решения, являются блок управления.
Причины, препятствующие достижению требуемого технического результата, состоят в особенностях структурной реализации известного устройства, которые не предоставляют возможности непрерывного получения информации о положении автомобиля при его движении с целью оценки расстояний до препятствий с любой стороны и под любым углом к вектору направления движения автомобиля.
Задача, на решение которой направлено предлагаемое изобретение, заключается в повышении функциональных возможностей известного устройства за счет осуществления одновременного и непрерывного контроля свободного места при совершении маневра (например, во время парковки) по запросу водителя, а также формирования сигналов звуковой и цифровой индикации об изменении расстояний до препятствий, что, в свою очередь, снижает вероятность возникновения аварийных ситуаций.
Технический результат от применения предлагаемого изобретения заключается в расширении функциональных возможностей устройства контроля дистанций автомобиля до препятствий в пространстве состояний за счет применения блока согласования уровней, блока цифровой индикации и блока преобразования сигналов, позволяющих осуществлять измерения контролируемых параметров и передавать данные в блок индикации, что в целом снижает вероятность возникновения аварийных ситуаций.
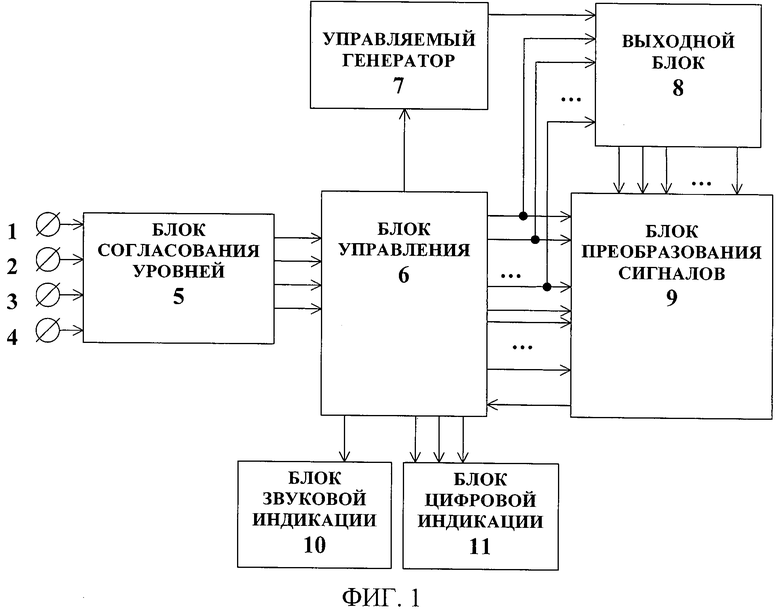
Для достижения технического результата в устройство контроля дистанций автомобиля до препятствий, содержащее блок управления, выходной блок, управляемый генератор и блок звуковой индикации дополнительно введены блок согласования уровней, блок преобразования сигналов и блок цифровой индикации, причем первый, второй, третий и четвертый информационные входы устройства контроля дистанций автомобиля до препятствий соединены с одноименными информационными входами блока согласования уровней, первый, второй, третий и четвертый информационные выходы которого соединены с одноименными информационными входами блока управления, первый управляющий выход которого соединен с управляющим входом управляемого генератора, m выходов группы вторых управляющих выходов блока управления соединены с m входами группы первых управляющих входов выходного блока и с входами группы первых управляющих входов блока преобразования сигналов, второй управляющий вход выходного блока соединен с управляющим выходом управляемого генератора, а n выходов группы информационных выходов выходного блока соединены с n входами группы информационных входов блока преобразования сигналов, r входов группы вторых управляющих входов которого соединены с r выходами группы третьих управляющих выходов блока управления, информационный выход блока преобразования сигналов соединен с пятым информационным входом блока управления, первый информационный выход которого соединен с информационным входом блока звуковой индикации, а группа вторых информационных выходов блока управления соединена с группой информационных входов блока цифровой индикации.
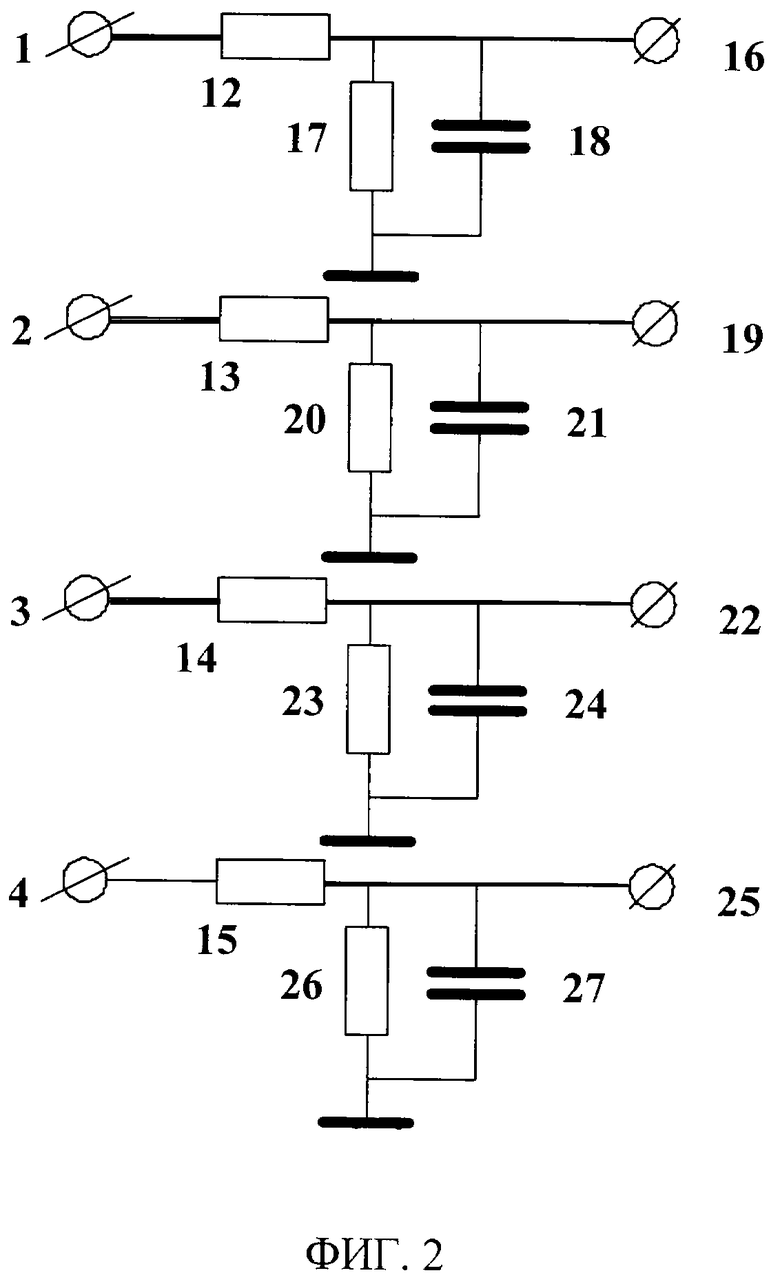
В блоке согласования уровней первый, второй, третий и четвертый информационные входы соединены соответственно с первыми выводами первого, второго, третьего и четвертого резисторов, второй вывод первого резистора соединен с первым информационным выходом блока согласования уровней, через пятый резистор и через первый конденсатор с земляной шиной, второй вывод второго резистора соединен со вторым информационным выходом блока согласования уровней, через шестой резистор и через второй конденсатор с земляной шиной, второй вывод третьего резистора соединен с третьим информационным выходом блока согласования уровней, через седьмой резистор и через третий конденсатор с земляной шиной, второй вывод четвертого резистора соединен с четвертым информационным выходом блока согласования уровней, через восьмой резистор и через четвертый конденсатор с земляной шиной.
В блоке преобразования сигналов m входов группы первых управляющих входов соединены с управляющими входами коммутатора, n входов группы вторых информационных входов соединены со вторыми информационными входами коммутатора, информационный выход которого соединен через предварительный усилитель и через полосовой фильтр с информационным входом управляемого усилителя, r входов группы вторых управляющих входов блока преобразования сигналов соединены с соответствующими входами управления управляемого усилителя, информационный выход которого соединен через амплитудный детектор с информационным выходом блока преобразования сигналов.
Сущность предлагаемого изобретения поясняется чертежами.
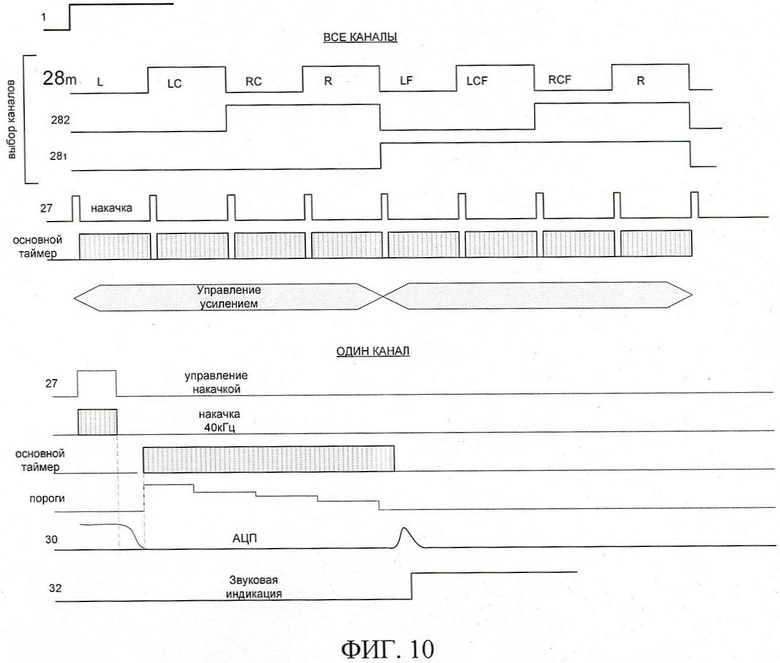
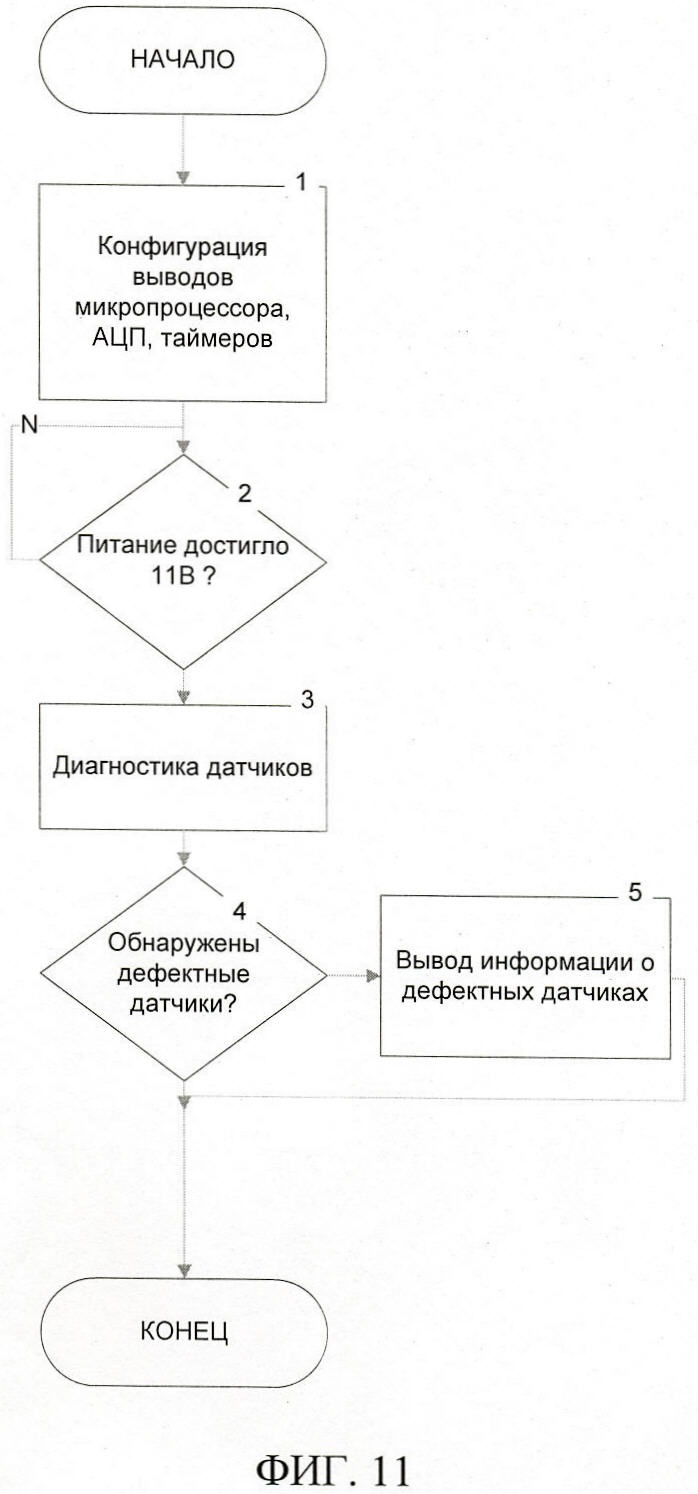
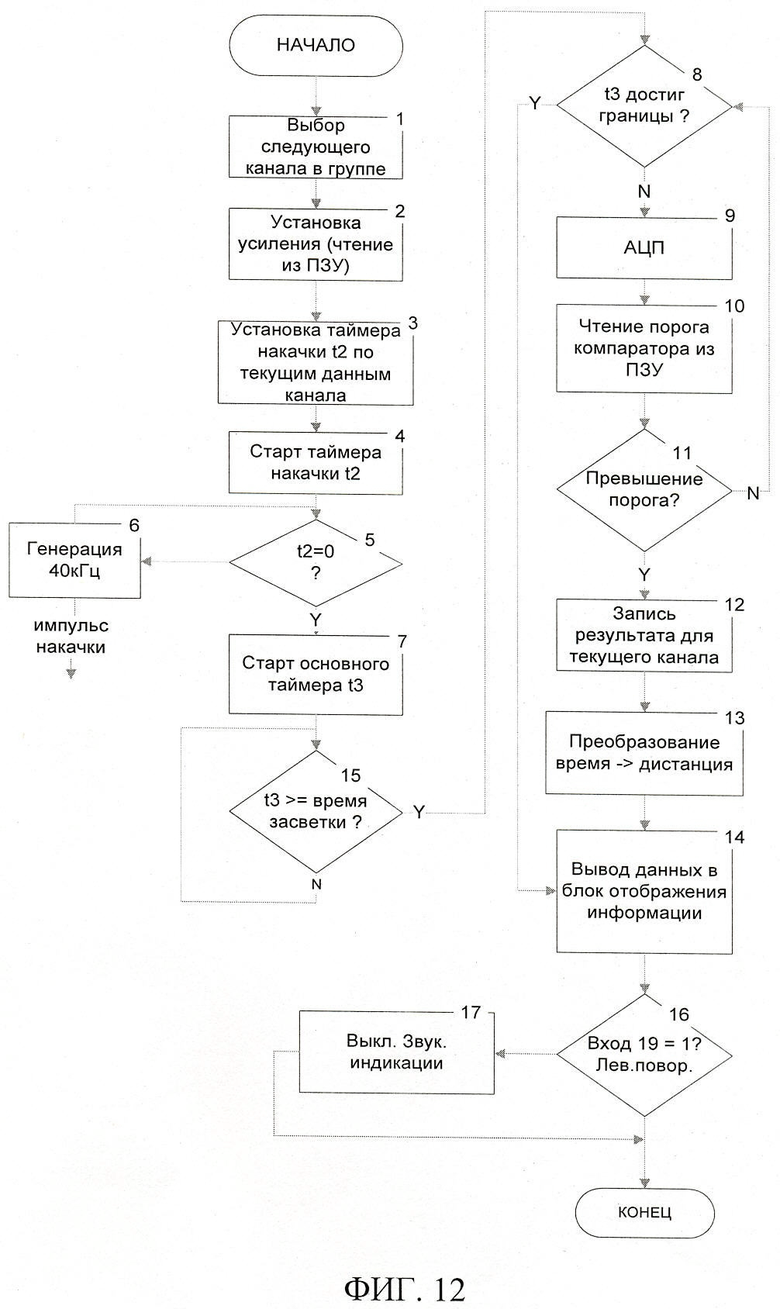
На фиг.1 приведена структурная схема устройства контроля дистанций автомобиля до препятствий. На фиг.2 приведена функциональная схема блока согласования уровней. На фиг.3 приведена функциональная схема блока управления. На фиг.4 приведена функциональная схема управляемого генератора. На фиг.5 приведена функциональная схема выходного блока. На фиг.6 приведена функциональная схема блока преобразования сигналов. На фиг.7 приведена функциональная схема блока звуковой индикации. На фиг.8 приведена структурная схема блока цифровой индикации. На фиг.9 приведен алгоритм, поясняющий работу устройства в целом. На фиг.10 приведены временные диаграммы, поясняющие работу алгоритма от микропроцессора до устройства индикации. На фиг.11 приведен алгоритм инициализации устройства. На фиг.12 приведены алгоритмы работы блоков «движение назад», «движение вперед» и «стоп»; алгоритма, поясняющего работу устройства в целом, причем работа названных блоков идентична.
Структурная схема устройства контроля дистанций автомобиля до препятствий (см. фиг.1) содержит: 1 - первый информационный вход устройства контроля дистанций; 2 - второй информационный вход устройства контроля дистанций; 3 - третий информационный вход устройства контроля дистанций; 4 - четвертый информационный вход устройства контроля дистанций; 5 - блок согласования уровней; 6 - блок управления; 7 - управляемый генератор; 8 - выходной блок; 9 - блок преобразования сигналов; 10 - блок звуковой индикации; 11 - блок цифровой индикации.
Функциональная схема блока согласования уровней 5 (см. фиг.2) содержит: 1 - первый информационный вход блока согласования уровней 5; 2 - второй информационный вход блока согласования уровней 5; 3 - третий информационный вход блока согласования уровней 5; 4 - четвертый информационный вход блока согласования уровней 5; 12, 13, 14, 15, 17, 20, 23 и 26 - первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой резисторы соответственно; 16 - первый информационный выход блока согласования уровней 5; 19 - второй информационный выход блока согласования уровней 5; 22 - третий информационный выход блока согласования уровней 5; 25 - четвертый информационный выход блока согласования уровней 5; 18, 21, 24 и 27 - первый, второй, третий и четвертый конденсаторы соответственно.
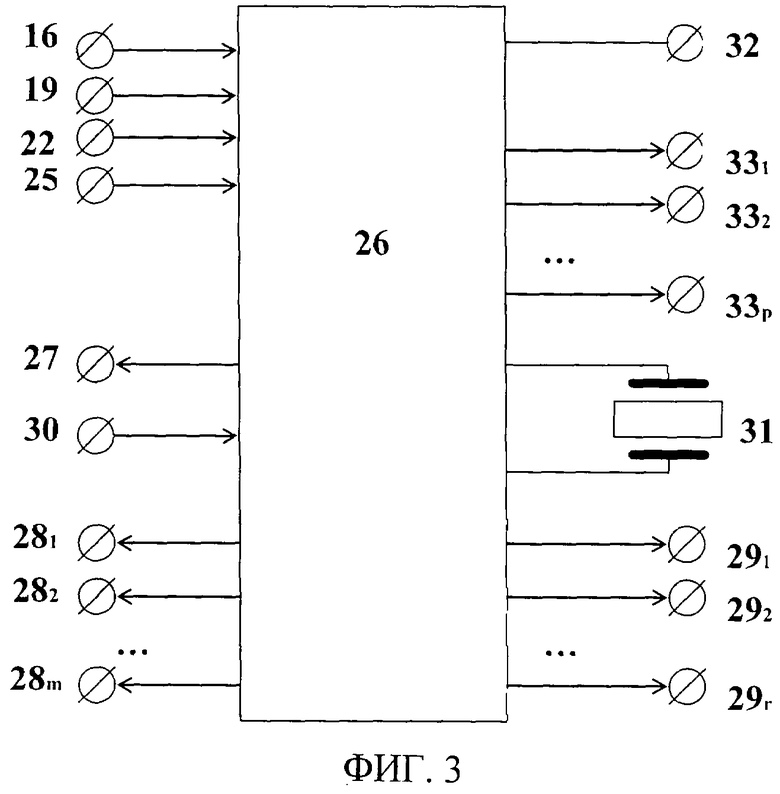
Функциональная схема блока управления 6 (см. фиг.3) содержит: 16, 19, 22, 25 - первый, второй, третий и четвертый информационные входы блока управления 6; 26 - процессор; 27 - управляющий выход блока управления 6; 281-28m - m выходов первой группы вторых управляющих выходов блока управления 6; 291-29r - r выходов второй группы третьих управляющих выходов блока управления 6; 30 - пятый информационный вход блока управления 6; 31 - кварцевый генератор; 32 - первый информационный выход блока управления 6; 331-33k - k выходов группы вторых информационных выходов блока управления 6.
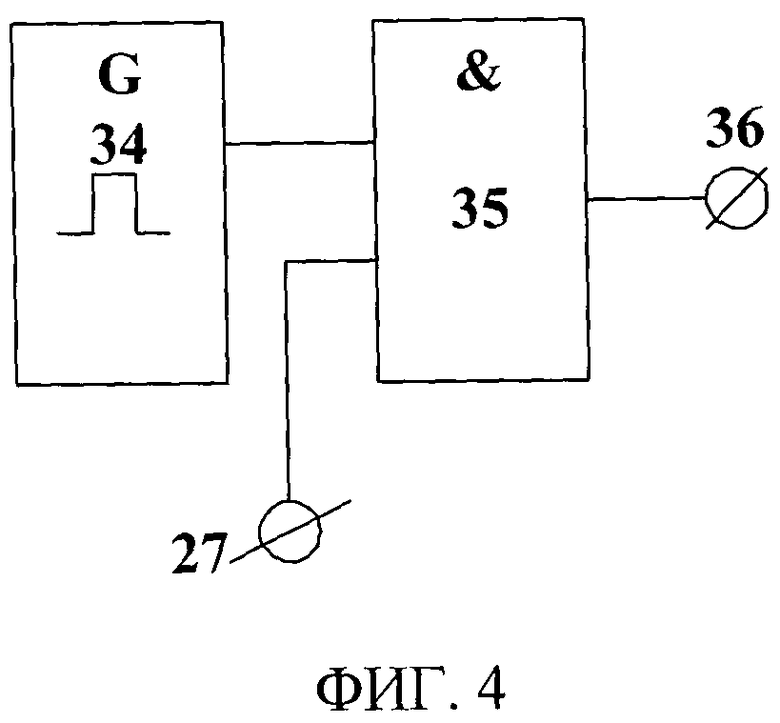
Функциональная схема управляемого генератора 7 (см. фиг.4) содержит: 27 - вход управляемого генератора 7; 34 - генератор опорной частоты; 35 - элемент И; 36 - управляющий выход управляемого генератора 7.
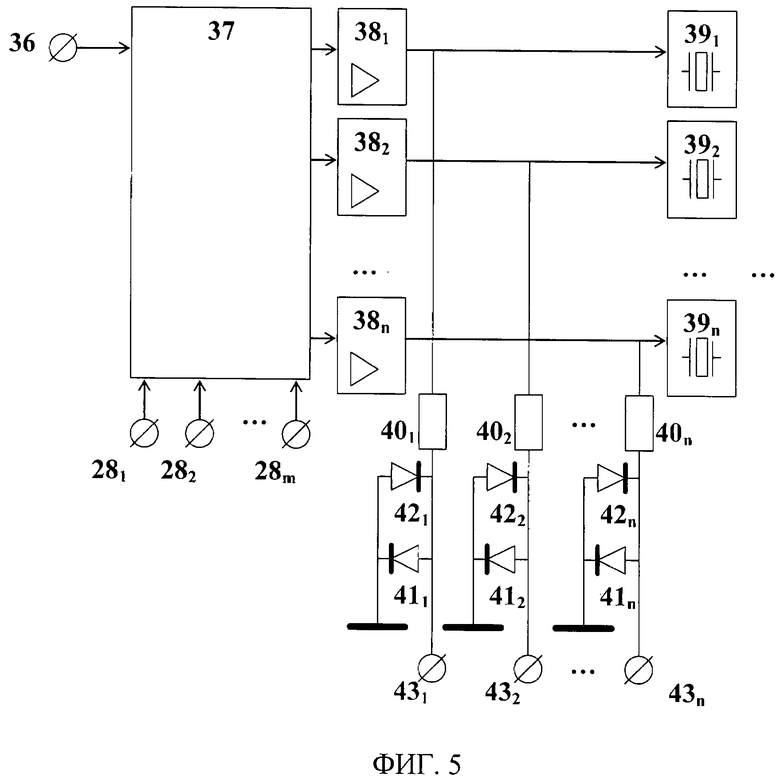
Функциональная схема выходного блока 8 (см. фиг.5) содержит: 281-28m - m первых управляющих входов первой группы выходного блока 8; 36 - второй управляющий вход выходного блока 8; 37 - коммутатор; 381-38n - группу усилителей напряжения; 391-39n - группу ультразвуковых приемопередатчиков; 401-40n - группу резисторов; 411-41n - группу первых диодов; 421-42n - группу вторых диодов; 431-43n - группу информационных выходов выходного блока 8.
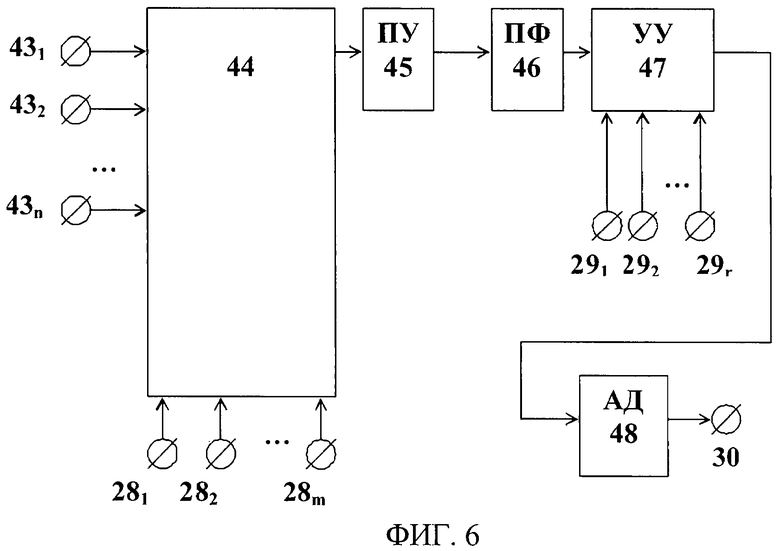
Функциональная схема блока преобразования сигналов 9 (см. фиг.6) содержит: 281-28m - m входов группы первых управляющих входов блока преобразования сигналов 9; 291-29r - r входов группы вторых управляющих входов блока преобразования сигналов 9; 30 - информационный выход блока преобразования сигналов 9; 431-43n - n входов группы вторых информационных входов блока преобразования сигналов 9; 44 - коммутатор; 45 - предварительный усилитель; 46 - полосовой фильтр; 47 - управляемый усилитель; 48 - амплитудный детектор.
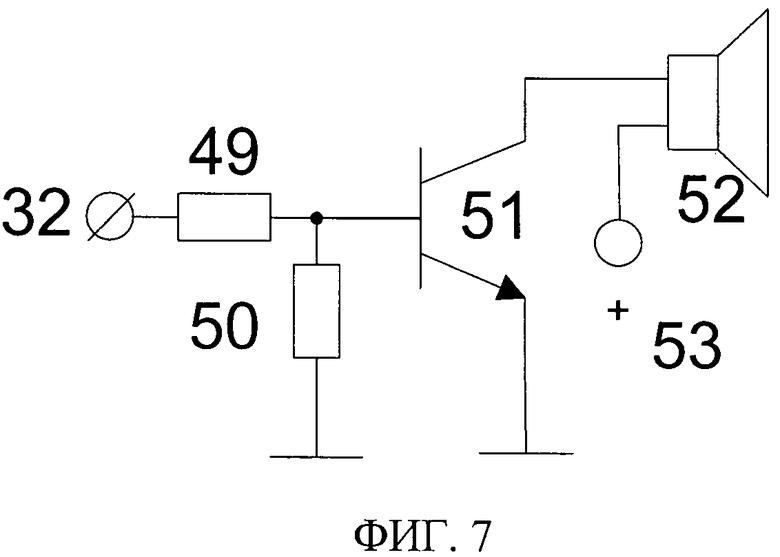
Функциональная схема блока звуковой индикации 10 (см. фиг.7) содержит: 32 - информационный вход блока звуковой индикации 10; 49 - первый резистор; 50 - второй резистор; 51 - транзистор; 52 - звуковой излучатель; 53 - шина положительного напряжения питания.
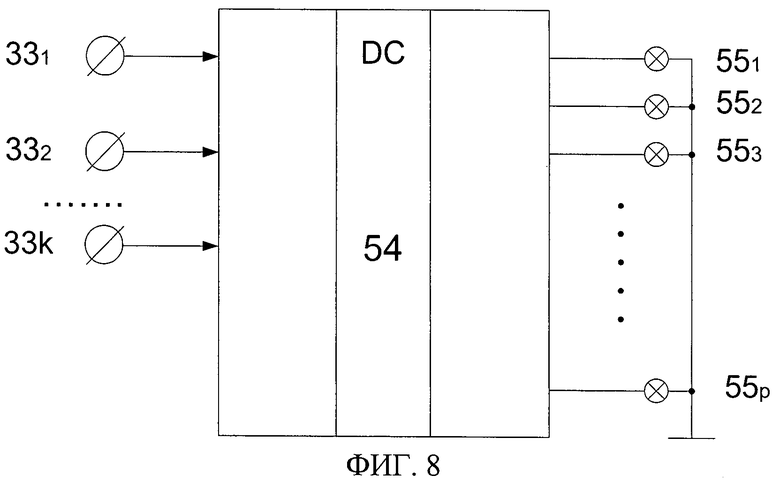
Функциональная схема блока цифровой индикации 11 (см. фиг.8) содержит: 331-33k - информационные входы блока цифровой индикации 11; 54 - дешифратор; 551-55р - группу световых индикаторов.
Временные диаграммы (см. фиг.10) содержат: 27 - управляющий выход блока управления 6; 281-28m - m выходов первой группы вторых управляющих выходов блока управления 6; 30 - пятый информационный вход блока управления 6; 32 - первый информационный выход блока управления 6.
Элементы устройства контроля дистанций при движении автомобиля взаимосвязаны следующим образом.
Первый 1, второй 2, третий 3 и четвертый 4 информационные входы устройства контроля дистанций при движении автомобиля (см. фиг.1) соединены с одноименными информационными входами блока согласования уровней 5, первый, второй, третий и четвертый информационные выходы которого соединены с одноименными информационными входами блока управления 6, первый управляющий выход которого соединен с управляющим входом управляемого генератора 7, m выходов группы вторых управляющих выходов блока управления 6 соединены с m входами группы первых управляющих входов выходного блока 8 и с m входами группы первых управляющих входов блока преобразования сигналов 9, второй управляющий вход выходного блока 8 соединен с управляющим выходом управляемого генератора 7, а n выходов группы информационных выходов выходного блока 8 соединены с n входами группы информационных входов блока преобразования сигналов 9, r входов группы вторых управляющих входов которого соединены с r выходами группы третьих управляющих выходов блока управления 6, информационный выход блока преобразования сигналов 9 соединен с пятым информационным входом блока управления 6, первый информационный выход которого соединен с информационным входом блока звуковой индикации 10, а группа вторых информационных выходов блока управления 6 соединена с группой информационных входов блока цифровой индикации 11.
В блоке согласования уровней 5 (см. фиг.2) первый 1, второй 2, третий 3 и четвертый 4 информационные входы соединены соответственно с первыми выводами первого 12, второго 13, третьего 14 и четвертого 15 резисторов, второй вывод первого резистора 12 соединен с первым 16 информационным выходом блока согласования уровней 5, через пятый резистор 17 и через первый конденсатор 18 с земляной шиной, второй вывод второго резистора 13 соединен со вторым 19 информационным выходом блока согласования уровней 5, через шестой резистор 20 и через второй конденсатор 21 с земляной шиной, второй вывод третьего резистора 14 соединен с третьим 22 информационным выходом блока согласования уровней 5, через седьмой резистор 23 и через третий конденсатор 24 с земляной шиной, второй вывод четвертого резистора 15 соединен с четвертым 25 информационным выходом блока согласования уровней 5, через восьмой резистор 26 и через четвертый конденсатор 27 с земляной шиной.
В блоке управления 6 (см. фиг.3) первый 16, второй 19, третий 22 и четвертый 25 информационные входы соединены соответственно с первым, вторым, третьим и четвертым информационными входами процессора 26, первый выход управления которого соединен с управляющим входом 27 блока управления 6, m вторых управляющих выходов первой группы микропроцессора 26 соединены соответственно с m управляющими выходами 281-28m первой группы вторых управляющих выходов блока управления 6, r третьих управляющих выходов второй группы микропроцессора 26 соединены соответственно с r третьими управляющими выходами 291-29r второй группы управляющих выходов блока управления 6, пятый информационный вход 30 которого соединен с информационным входом микропроцессора 26, первый и второй входы синхронизации которого соединены с соответствующими выводами кварцевого генератора 31, первый информационный выход микропроцессора 26 соединен с первым информационным выходом 32 блока управления 6, k вторых информационных выходов группы которого соединены с k выходами 331-33k группы вторых информационных выходов блока управления 6.
В управляемом генераторе 7 (см. фиг.4) выход генератора опорной частоты 34 соединен с первым входом элемента И 35, второй вход которого соединен с информационным входом 27 управляемого генератора 7, а выход элемента И 35 соединен с управляющим выходом 36 управляемого генератора 7.
В выходном блоке 8 (см. фиг.5) m первых управляющих входов 281-28m первой группы управляющих входов соединены с группой первых входов управления коммутатора 37, второй управляющий вход которого соединен со вторым управляющим входом 36 выходного блока 8, i-й,  управляющий выход коммутатора 37 соединен с входом i-го усилителя напряжения 38i выход каждого i-го усилителя напряжения 38i соединен со входом ультразвукового приемопередатчика 39i и через резистор 40i с анодом диода 41i первой группы диодов, с катодом диода 42i второй группы диодов и с i-м информационным выходом 43i группы информационных выходов выходного блока 8, катоды диодов 41i первой группы диодов и аноды диодов 42i второй группы диодов объединены и соединены с земляной шиной.
управляющий выход коммутатора 37 соединен с входом i-го усилителя напряжения 38i выход каждого i-го усилителя напряжения 38i соединен со входом ультразвукового приемопередатчика 39i и через резистор 40i с анодом диода 41i первой группы диодов, с катодом диода 42i второй группы диодов и с i-м информационным выходом 43i группы информационных выходов выходного блока 8, катоды диодов 41i первой группы диодов и аноды диодов 42i второй группы диодов объединены и соединены с земляной шиной.
В блоке преобразования сигналов 9 (см. фиг.6) m входов группы первых управляющих входов 281-28m соединены с управляющими входами коммутатора 44, n входов группы вторых информационных входов 431-43n соединены со вторыми информационными входами коммутатора 44, информационный выход которого соединен через предварительный усилитель 45 и через полосовой фильтр 46 с информационным входом управляемого усилителя 47, r входов группы вторых управляющих входов 291-19r блока преобразования сигналов 9 соединены с соответствующими входами управления управляемого усилителя 47, информационный выход которого соединен через амплитудный детектор 48 с информационным выходом 30 блока преобразования сигналов 9.
В блоке звуковой индикации 10 (см. фиг.7) информационный вход 32 соединен через первый резистор 49 с одним выводом второго резистора 50 и с базой транзистора 51, другой вывод второго резистора 50 и эмиттер транзистора 51 соединены с земляной шиной, а коллектор транзистора 51 соединен с первым входом звукового излучателя (название должно быть по ГОСТ) 52, второй вход которого соединен с шиной положительного напряжения питания 53.
В блоке цифровой индикации 11 (см. фиг.8) информационные входы 331-33k соединены с управляющими входами дешифратора 54, i-e,  входы группы информационных выходов которого соединены с первыми входами соответствующих световых индикаторов 551-55р, вторые входы которых соединены с земляной шиной.
входы группы информационных выходов которого соединены с первыми входами соответствующих световых индикаторов 551-55р, вторые входы которых соединены с земляной шиной.
Работает устройство контроля дистанций автомобиля до препятствий следующим образом.
После подачи питания происходит инициализация устройства в соответствии с алгоритмом, представленным на фиг.11. Сначала производится конфигурация портов ввода-вывода, таймеров, блока АЦП, микроконтроллера 26 блока управления 6 (см. фиг.3), считывание из ПЗУ параметров работы. Затем в цикле происходит измерение напряжения питания, которое может нарастать плавно. Как только напряжение достигло значения 11 В, то происходит выход из цикла. Затем происходит проверка подключения всех ультразвуковых приемо-передатчиков 391-39n (см. блоки 3-5 на фиг.11). Если хотя бы один ультразвуковой приемопередатчик 39i оказывается неподключенным, то производится вывод информации об этом на блоки звуковой 10 и цифровой индикации 11.
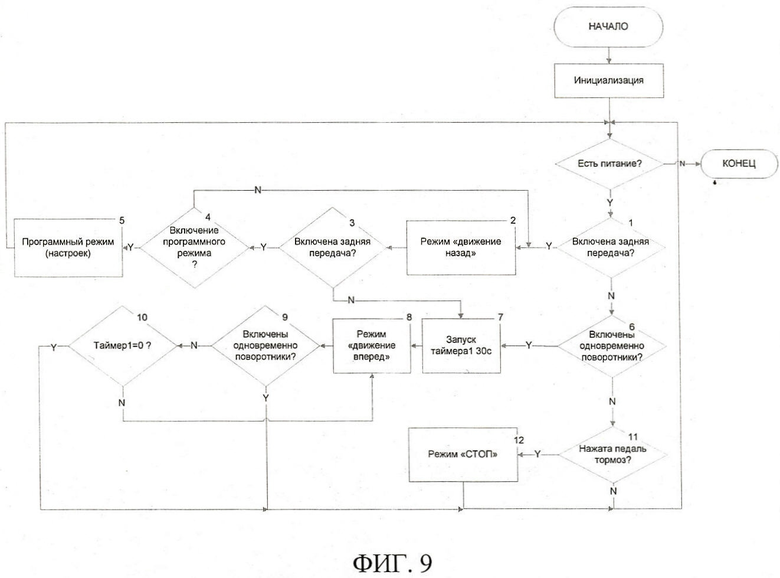
После завершения инициализации микроконтроллера 26 блока управления 6 алгоритм работы устройства переходит в режим опроса первого, второго, третьего и четвертого информационных входов 16, 19, 22, 25 блока управления 6 (см. блоки 1, 6, 11 алгоритма, поясняющего работу устройства в целом (фиг.9)).
При появлении уровня логической единицы на первом информационном входе 16 блока управления 6 (что соответствует включению задней передачи) устройство переходит в режим работы «движение назад» (блок 1 алгоритма на фиг.9). При этом вначале происходит измерение параметра «время засветки» ультразвуковых приемопередатчиков 391-39n, работающих в режиме «движение назад». Затем выбирается наибольшее значение этого параметра «время засветки» и заносится в оперативную память микроконтроллера 26 блока управления 6.
После этого алгоритм начинает процесс опроса датчиков ультразвуковых приемопередатчиков 391-39n, работающих в режиме «движение назад» (см. блок 1 алгоритма на фиг.12).
Из ПЗУ микроконтроллера 26 блока управления 6 считывается уровень усиления на выходы второй группы третьих управляющих выходов 291-29r блока 6 (см. фиг.3). Устанавливается (см. блок 2 алгоритма на фиг.12) уровень усиления в управляемом усилителе 47 блока преобразования сигналов 9 по входам группы вторых управляющих входов 291-29r.
Управление передается блоку 3 и блоку 4 алгоритма на фиг.12 и происходит инициализация и старт таймера t2 микроконтроллера 26 блока управления 6 в зависимости от текущих данных дистанции от автомобиля до препятствия, посредством чего осуществляется автоматическая регулировка мощности выходного сигнала.
Блоки 5, 6 алгоритма на фиг.12 показывают отсчет таймера t2 микроконтроллера 26 блока управления 6 до нулевого значения. В это время вырабатывается сигнал на управляющем выходе 27 блока управления 6 для управляемого генератора 7 (см. фиг.4), который включается и вырабатывает последовательность сигналов на выходе 36 управляемого генератора 7. Данная последовательность импульсов подается на второй управляющий вход выходного блока 8 для последующего усиления (усилитель напряжения 38) и подачи на ультразвуковой приемопередатчик 39 в зависимости от сигнала на первых управляющих входах 281-28m - первой группы выходного блока 8.
После того как таймер t2 микроконтроллера 26 блока управления 6 досчитает до нуля (см. блок 5 на фиг.12), обнуляется основной таймер t3, для него задается предел счета, соответствующий максимальной контролируемой дистанции работы системы (обнаружения препятствий) в режиме «движение назад» и стартует (см. блок 7 на фиг.12). В блоке 15 алгоритма на фиг.12 таймер t3 ожидает достижения значения параметра «время засветки».
Затем, пока таймер не произвел полного отсчета заданного значения, в блоках 9-11 алгоритма на фиг.12, в цикле происходит оцифровка входного сигнала на информационном входе 30 микроконтроллера 26 блока управления 6, который является входом АЦП, чтение из ПЗУ микроконтроллера пороговых значений программного компаратора и сравнение их со значениями, полученными в АЦП.
Если таймер t3 достиг заданного значения или если значение сигнала на выходе АЦП превышает пороговый уровень программного компаратора, то происходит выход из цикла и запись текущего значения таймера t3 в оперативную память микроконтроллера (см. блок 12 на фиг.12).
После этого в блоке 13 алгоритма происходит пересчет записанного значения таймера t3 в значение дистанции и в блоке 14 вывод этого значения в блок звуковой индикации 10 и блок звуковой индикации 11.
Затем в блоке 16 алгоритма на фиг.12 происходит опрос информационного входа 19 блока управления 6. Если на нем присутствует уровень логической единицы (включен левый поворотник), то в блоке 17 алгоритма происходит отключение звуковой индикации.
В соответствии с описанием работы алгоритмов (см. фиг.9, 11, 12) рассмотрим работу блоков устройства контроля дистанций автомобиля до препятствий.
В зависимости от комбинаций сигналов на первом 1, втором 2, третьем 3 и четвертом 4 информационных входах устройства выбираются наборы датчиков для опроса (на фиг.9 показан опрос трех наборов датчиков). Работа устройства с каждым из наборов датчиков одинакова, за исключением задаваемого предела счета для таймера t3 (максимальной дистанции для работы системы), устанавливаемого усиления для управляемого усилителя 47 (фиг.6) и параметров звуковой и световой сигнализаций.
Коммутатор 37 выходного блока 8 (см. фиг.5) и коммутатор 44 блока преобразования сигналов 9 (см. фиг.6) по управляющим входам 281-28m переключаются на первый канал первого набора датчиков по входам 1-4 устройства. Таймер t2 инициализируется значением, рассчитанным исходя из текущей дистанции до препятствия, и запускается. Пока таймер t2 отсчитывает до нулевого значения, на управляющем выходе 27 блока управления 26 формируется управляющий импульс, поступающий на вход управляемого генератора 7. Генератор 34 (см. фиг.4) вырабатывает сигнал с частотой, равной центральной частоте работы ультразвуковых датчиков 391-39n. На выходе 34 управляемого генератора 7 формируется пачка импульсов накачки длительностью «единица», которая через коммутатор 37 выходного блока и усилитель 381 поступает на ультразвуковой датчик 391. В датчике электрические импульсы преобразуются в механические колебания пьезопластины, вызывая излучение акустических волн в пространство.
Согласно алгоритму работы в блоке управления 6 микропроцессор 26 вырабатывает время достижения таймером t2 значения параметра «время засветки» и включается АЦП.
В случае наличия препятствия акустические волны отражаются от него и возвращаются, воздействуя на ультразвуковой датчик 391, в котором образуется электрический сигнал, который через диодный ограничитель, собранный на резисторе 401, диоде 411 и диоде 421, поступает на вход коммутатора 431 блока преобразования сигналов 9. С выхода коммутатора 43 сигнал эха поступает на предварительный усилитель 45, далее на полосовой фильтр 46, настроенный на частоту работы ультразвуковых датчиков, и усиливается в управляемом усилителе 47. Усиленный до необходимого уровня сигнал детектируется в амплитудном детекторе 48 и поступает на информационный вход 30 блока управления 26, который является входом АЦП микропроцессора 26 блока управления 6.
В АЦП происходит оцифровка входного сигнала и сравнение его уровня с пороговыми уровнями, считываемыми из ПЗУ для текущего значения таймера t3.
При превышении порогового уровня происходит запоминание текущего значения таймера t3 для текущего канала, вычисление минимального значения из данных всех каналов, преобразование его в показания дистанции и выдача на световой и звуковой индикаторы.
Далее начинается опрос следующего датчика из набора 1.
Технико-экономическая эффективность предлагаемого устройства контроля дистанций автомобиля до препятствий по отношению к известному устройству для автомобиля (см. патент RU №2380725 от 10.09.2008, М.кл. 6 G01S 15/18, заявитель: ФОЛЬКСВАГЕН АКЦИЕНГЕЗЕЛЛЬШАФТ, авторы Миларк Андреас; Рольфе Михель; Хлоста Свен), оценивается по результатам уменьшения вероятности возникновения аварийных ситуаций.
Устройство контроля дистанций автомобиля до препятствий может быть реализовано с применением процессоров на элементах любых отечественных и зарубежных серий с использованием современных материалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ ШИН АВТОМОБИЛЯ | 2010 |
|
RU2425760C1 |
| МУЛЬТИЭЛЕКТРОДНОЕ УСТРОЙСТВО ДЛЯ ЭЛЕКТРОСТИМУЛЯЦИИ | 2003 |
|
RU2311207C2 |
| АДАПТИВНЫЙ ЭЛЕКТРОСТИМУЛЯТОР | 2007 |
|
RU2345798C2 |
| АДАПТИВНЫЙ ЭЛЕКТРОСТИМУЛЯТОР | 1998 |
|
RU2155614C2 |
| АДАПТИВНЫЙ ЭЛЕКТРОСТИМУЛЯТОР С ВИРТУАЛЬНЫМ ЭЛЕКТРОДОМ | 2000 |
|
RU2198695C2 |
| АДАПТИВНЫЙ ЭЛЕКТРОСТИМУЛЯТОР | 2001 |
|
RU2211712C2 |
| УСТРОЙСТВО ДЛЯ ФИЗИОТЕРАПИИ С БИОЛОГИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ | 2001 |
|
RU2203698C2 |
| Устройство для контроля | 1981 |
|
SU991429A1 |
| ЗВУКОВОЙ ДЕКОДЕР | 1993 |
|
RU2099905C1 |
| Устройство для испытаний датчиков давления | 1983 |
|
SU1129624A1 |
Изобретение относится к технике предотвращения столкновений автомобиля с препятствиями, в частности к средствам контроля расстояния от переднего и заднего бамперов автомобиля до различных препятствий в процессе движения. В предложенном устройстве применены блок согласования уровней, блок цифровой индикации и блок преобразования сигналов, позволяющие осуществлять измерения контролируемых параметров и передавать данные в блок индикации. Кроме того, в устройстве имеются блок управления, выходной блок, управляемый генератор и блок звуковой индикации. Технический результат от данного изобретения заключается в расширении функциональных возможностей устройства за счет осуществления одновременного и непрерывного контроля свободного места при совершении маневра (например, во время парковки) по запросу водителя, а также благодаря формированию сигналов звуковой и цифровой индикации об изменении расстояний до препятствий. Это, в свою очередь, снижает вероятность возникновения аварийных ситуаций. 2 з.п. ф-лы, 12 ил.
1. Устройство контроля дистанций автомобиля до препятствий, содержащее блок управления, выходной блок, управляемый генератор и блок звуковой индикации, отличающееся тем, что в него дополнительно введены блок согласования уровней, блок преобразования сигналов и блок цифровой индикации, причем первый, второй, третий и четвертый информационные входы устройства контроля дистанций при движении автомобиля соединены с одноименными информационными входами блока согласования уровней, первый, второй, третий и четвертый информационные выходы которого соединены с одноименными информационными входами блока управления, первый управляющий выход которого соединен с управляющим входом управляемого генератора, m выходов группы вторых управляющих выходов блока управления соединены с m входами группы первых управляющих входов выходного блока и с входами группы первых управляющих входов блока преобразования сигналов, второй управляющий вход выходного блока соединен с управляющим выходом управляемого генератора, а n выходов группы информационных выходов выходного блока соединены с n входами группы информационных входов блока преобразования сигналов, r входов группы вторых управляющих входов которого соединены с r выходами группы третьих управляющих выходов блока управления, информационный выход блока преобразования сигналов соединен с пятым информационным входом блока управления, первый информационный выход которого соединен с информационным входом блока звуковой индикации, а группа вторых информационных выходов блока управления соединена с группой информационных входов блока цифровой индикации.
2. Устройство контроля дистанций автомобиля до препятствий по п.1, отличающееся тем, что блок согласования уровней содержит первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой резисторы, первый, второй, третий и четвертый конденсаторы, причем первый, второй, третий и четвертый информационные входы блока согласования уровней соединены соответственно с первыми выводами первого, второго, третьего и четвертого резисторов, второй вывод первого резистора соединен с первым информационным выходом блока согласования уровней, через пятый резистор и через первый конденсатор - с земляной шиной, второй вывод второго резистора соединен со вторым информационным выходом блока согласования уровней, через шестой резистор и через второй конденсатор - с земляной шиной, второй вывод третьего резистора соединен с третьим информационным выходом блока согласования уровней, через седьмой резистор и через третий конденсатор - с земляной шиной, второй вывод четвертого резистора соединен с четвертым информационным выходом блока согласования уровней, через восьмой резистор и через четвертый конденсатор - с земляной шиной.
3. Устройство контроля дистанций автомобиля до препятствий по п.1, отличающееся тем, что блок преобразования сигналов содержит коммутатор, предварительный усилитель, полосовой фильтр, управляемый усилитель и амплитудный детектор, причем m входов группы первых управляющих входов соединены с управляющими входами коммутатора, n входов группы вторых информационных входов соединены со вторыми информационными входами коммутатора, информационный выход которого соединен через предварительный усилитель и через полосовой фильтр с информационным входом управляемого усилителя, r входов группы вторых управляющих входов блока преобразования сигналов соединены с соответствующими входами управления управляемого усилителя, информационный выход которого соединен через амплитудный детектор с информационным выходом блока преобразования сигналов.
| УСТРОЙСТВО ДЛЯ АВТОМОБИЛЯ | 2005 |
|
RU2380725C2 |
| Опрокидная платформа для повозок | 1947 |
|
SU81343A1 |
| Измерительное устройство для автоматических регуляторов | 1940 |
|
SU63070A1 |
| Устройство для регулирования топливных насосов двигателей внутреннего горения | 1939 |
|
SU56002A1 |
| Устройство для транспортирования грунта из кессона | 1934 |
|
SU40270A1 |

