Изобретение относится к способу контроля процесса трогания с места транспортного средства согласно типу, определенному более подробно в ограничительной части формулы изобретения.
Автоматизированные системы переключения состоят относительно своих главных компонентов из обычных, при необходимости имеющих также возможность приведения в действие вручную, систем переключения, в которых приведение в действие разделительного и/или включаемого при трогании автомобиля с места сцепления между приводным двигателем и коробкой передач, а также выбор и переключение передач коробки передач осуществляются автоматизированно посредством соответствующих средств приведения в действие. Эти средства приведения в действие обычно выполнены в виде приводимых гидравлически или пневматически устройств поршень - цилиндр или в виде электрических исполнительных механизмов, которые воздействуют на установочные средства для названных функций коробки передач. Установочные средства могут быть расположены на или в коробке передач.
Для управления гидравлическими или же пневматическими средствами приведения в действие необходимы устройства создания давления и управления, которые согласно уровню техники включают в себя гидравлический или пневматический насос в качестве устройства для создания давления, гидро- или пневмоаккумулятор и гидравлический или пневматический блок управления с управляющими клапанами и датчиками, которые соединены с центральным устройством управления и регулировки и могут быть управляемы согласно заложенным в нем функциям управления и регулировки.
В DE 10230612 А1 раскрыта трансмиссия для эксплуатации транспортного средства, которая включает в себя приводной двигатель, систему передачи крутящего момента и автоматизированную коробку переключения передач. Система передачи крутящего момента может быть приведена в действие автоматизированно посредством исполнительного механизма, а коробка передач имеет по меньшей мере две включаемые передачи с различным передаточным числом, при этом по меньшей мере одна передача коробки передач служит в качестве передачи, включаемой при трогании с места. Процесс трогания с места управляется посредством прибора управления с помощью использования характеристической кривой трогания с места, которая, по меньшей мере, временно может быть приведена в соответствие ситуации трогания с места.
В DE 10031771 А1 раскрыто транспортное средство с устройством для автоматизированного приведения сцепления в действие. Трансмиссия транспортного средства имеет двигатель, коробку передач, блок управления и приводимый в действие блоком управления исполнительный механизм для приведения в действие сцепления. В процессе трогания с места увеличивается передаваемый сцеплением крутящий момент и регулируется по существу до заданного значения крутящего момента, при этом передаваемый сцеплением крутящий момент перед достижением равного числа оборотов двигателя и коробки передач, по меньшей мере, краткосрочно увеличивается и снова снижается. За счет этого можно реализовать комфортное трогание с места транспортного средства.
В автоматизированных коробках переключения передач с также автоматизированным сцеплением принято, что имеющиеся функции приводятся в соответствие использованию транспортного средства по назначению с помощью набора параметров. Например, настройка может быть проведена с акцентированием комфорта или мощности. При такой настройке характеристик движения постоянно предполагается, что участвующие конструктивные элементы и агрегаты изменяются только в рамках достаточно узких допусков. Соответствующие предельные значения могут быть включены в такую настройку. При известных зависимостях могут быть использованы адаптации или кривые корректировки, для того чтобы компенсировать влияние, которое бы изменило характеристики движения.
Недостатки уровня техники заключаются в том, что, несмотря на упомянутый принцип работы или же действий, во время эксплуатации коробки передач возможны непредсказуемые отклонения, так что программа управления с настроенным набором параметров не приводит к необходимым характеристикам движения. Например, возможно, что транспортное средство не может тронуться, потому что запрограммированный набор параметров не пригоден для того, чтобы справиться с текущей ситуацией движения. Например, это возможно в том случае, если одно или несколько пограничных условий значительно изменились по отношению к настроенному состоянию. Например, передаточное соотношение сцепления может быть явно меньше, мощность двигателя явно хуже и/или сопротивление движению явно выше.
В основу настоящего изобретения положена задача разработать способ для контроля процесса трогания с места транспортного средства и устранить недостатки уровня техники.
Положенная в основу изобретения задача решена посредством известного из уровня техники способа контроля процесса трогания с места транспортного средства, имеющего также отличительные признаки независимого пункта формулы.
Для того чтобы надежно распознать ситуацию движения и, при необходимости, также совладать с ней, согласно изобретению используется наблюдатель за троганием с места. Под наблюдателем понимается просто логика, которая на основании подходящих сигналов наблюдает, возникают ли от соответствующей функции в приборе управления события или же процессы, целью которых было использование этой функции.
Согласно изобретению, наблюдатель процесса трогания с места должен распознавать, действительно ли транспортное средство начинает движение, если водитель хочет тронуться с места. Наблюдатель процесса трогания с места при этом имеет следующие задачи:
- распознавание, необходимо ли тронуться,
- распознавание, выполняется ли трогание,
- принятие мер, которые благоприятствуют троганию, если несмотря на желание тронуться с места, транспортное средство с места не трогается,
- защита агрегатов при неудачном трогании с места.
Однозначное желание тронуться с места может быть выведено из угла педали акселератора. Если угол педали акселератора слишком велик, например, более 90%, то наблюдатель трогания с места исходит из однозначного желания тронуться. Если имеется однозначное желание тронуться с места, то заложенная нормальная функция управления ведет с помощью соответствующего блока параметров, как правило, в течение измеримого времени, к тому, что транспортное средство начинает движение. Если транспортное средство, несмотря на желание тронуться с места в течение задаваемого времени наблюдения, не начинает движение, то наблюдатель трогания с места принимает меры, которые отличаются от нормального режима.
Могут быть приняты следующие меры, чтобы благоприятствовать троганию с места:
- увеличение заданного числа оборотов двигателя и, при необходимости, легкое открытие сцепления. Этот процесс соответствует вспомогательной мере, которую вероятно выполнил бы водитель с ручной коробкой переключения передач и имеющейся педали сцепления для того чтобы достичь трогания с места. Как правило, это приводит к тому, что двигатель может создать более высокий момент, чем обычно необходимо в нормальном режиме. Эти меры могут, например, повторяться циклично. За счет увеличения числа оборотов двигателей трогание с места может происходить при более высоких моментах, чем в нормальном режиме. Легкое открытие сцепления при этом является не обязательным;
- далее наблюдается, происходит ли в связи с принятыми мерами (увеличение заданного числа оборотов двигателя и, при необходимости, легкое открытие сцепления) трогание с места. Если это не так, то после дополнительного времени сцепление может быть принудительно закрыто, чтобы быстро передать приложенный на двигатель более высокий момент на колеса транспортного средства. Возможно, регулируемый в нормальном режиме процесс при этом заменяется управляемым процессом.
Если обе эти меры (увеличение заданного числа оборотов двигателя и, при необходимости, легкое открытие сцепления, а также принудительное закрытие сцепления) не приводят к троганию транспортного средства с места, то после этого обеспечивается, что необходимые для трогания конструктивные детали защищаются от разрушения, прежде всего сцепление и двигатель. Для этого после дополнительного времени и/или при превышении порогового значения для зарегистрированной энергии сцепления момент двигателя снижается посредством воздействия на двигатель, например, с помощью шины данных. Это приводит либо к троганию, либо к глушению двигателя. После отведения назад педали акселератора это состояние или принятые меры снова отменяются и могут быть выполнены дополнительные попытки тронуться с места.
Далее, в качестве примера подробнее объясняется со ссылкой на чертеж основной принцип изобретения, которое допускает несколько форм осуществления.
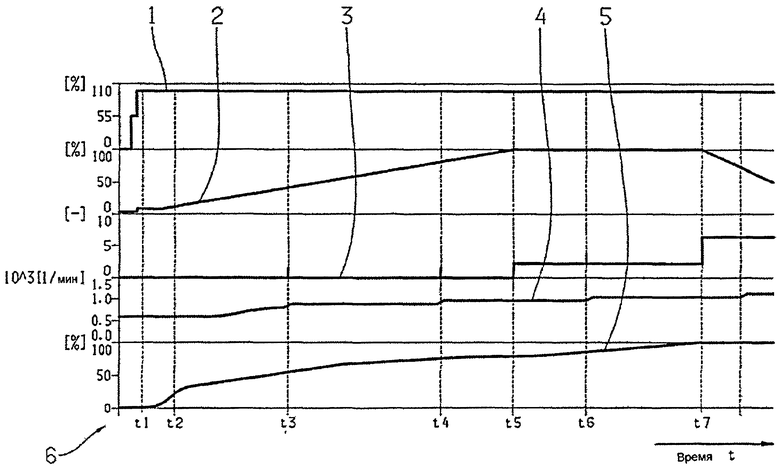
Единственная фигура этого чертежа представляет различные параметры транспортного средства как функцию от времени t. На диаграмме 6 показаны характеристические кривые для положения 1 педали акселератора, момент 2 двигателя, заданного числа оборотов 4 двигателя, положения 5 сцепления и характеристическая кривая 3, из которой видны принятые меры. К моменту времени t1 наблюдатель процесса трогания с места исходит из однозначного желания тронуться, так как положение педали акселератора больше 90%. Заложенная нормальная функция управления к моменту времени t2 еще не ведет с помощью сохраненного набора параметров к троганию транспортного средства с места. Если транспортное средство, несмотря на желание тронуться с места в течение задаваемого времени наблюдения, не начинает движение, то наблюдатель процесса трогания с места принимает меры, которые отличаются от нормального режима. По истечении этого времени наблюдения к моменту времени t3 число оборотов двигателя увеличивается, что видно из характеристических кривых 3, 4. Это приводит к тому, что двигатель может создать более высокий момент, чем обычно необходимо в нормальном режиме. К моменту времени t4 трогания с места все еще не произошло, в результате чего число оборотов двигателя еще раз увеличивается. Так как после повторного увеличения заданного числа оборотов двигателя трогания все еще не произошло, то к моменту времени t5 сцепление принудительно закрывается, что наглядно следует из кривых 3, 5. Принудительное закрытие сцепления выполняется в течение задаваемого интервала времени между моментами времени t5 и t7. Несмотря на принятое принудительное закрытие сцепления, к моменту времени t6 трогание все еще не происходит, за счет чего число оборотов двигателя к моменту времени t6 повторно увеличивается. К моменту времени t7 сцепление полностью закрыто. Несмотря на неоднократное увеличение заданного числа оборотов двигателя и принудительное закрытие сцепления, к моменту времени t7 трогания все еще не происходит, вслед за чем к этому моменту момент двигателя снижается для защиты необходимых для трогания с места конструктивных элементов, прежде всего двигателя и сцепления. Увеличение числа оборотов двигателя может быть неоднократно повторено во время попытки трогания с места с циклически задаваемыми интервалами t3, t4, t6.
Изобретение относится к способу контроля процесса трогания с места транспортного средства. Способ заключается в том, что распознают необходимость трогания с места и выполнения трогания с места после однозначного желания трогания с места. Если трогания с места не происходит, то обеспечивают создание более высокого момента, в нормальном режиме. Повторяют вышеуказанную операцию, если трогания с места не происходит. Принудительно закрывают систему передачи крутящего момента после задаваемого времени, если посредством принятых мер не происходит трогания с места. Момент двигателя после задаваемого интервала времени и/или превышения порогового значения для зарегистрированной энергии сцепления снижается посредством воздействия на двигатель. Осуществляют возможность повторных попыток трогания с места. Технический результат заключается в надежном определении ситуации движения. 1 ил.
Способ контроля процесса трогания с места транспортного средства с автоматизированной системой переключения, которое имеет трансмиссию с приводным двигателем, системой передачи крутящего момента, коробкой передач, блоком управления и приводимым в действие блоком управления исполнительным элементом для приведения в действие системы передачи крутящего момента, отличающийся следующими шагами:
а) распознавание необходимости трогания с места, например, на основании приведения в действие педали акселератора,
б) распознавание выполнения трогания с места после однозначного желания трогания с места,
в) если, несмотря на желание тронуться с места, трогания с места не происходит: увеличение числа оборотов двигателя и, при необходимости, легкое открытие системы передачи крутящего момента, что, как правило, приводит к тому, что приводной двигатель имеет возможность создания более высокого момента, чем обычно необходимо в нормальном режиме;
г) проверка выполнения трогания с места с принятыми мерами и повторение шага в), если трогания с места не происходит;
д) принудительное закрытие системы передачи крутящего момента после задаваемого времени, если посредством принятых на шаге в) мер все еще не происходит трогания с места, за счет чего приложенный на приводной двигатель более высокий крутящий момент быстро передается на колеса транспортного средства, при этом регулируемый в нормальном режиме процесс заменяется управляемым процессом,
е) защита от разрушения необходимых для трогания с места конструктивных элементов, прежде всего, приводного двигателя и системы передачи крутящего момента, если принятые на шаге в) и д) меры не ведут к троганию с места, при этом момент двигателя после задаваемого интервала времени и/или превышения порогового значения для зарегистрированной энергии сцепления снижается посредством воздействия на двигатель, например, через шину данных,
ж) возврат в исходное положение неудавшегося процесса трогания с места путем отведения назад педали акселератора,
з) осуществление возможности повторных попыток трогания с места.
| DE 19632621 C1, 20.11.1997 | |||
| DE 10221263 A1, 21.11.2002 | |||
| US 2003022759 A1, 30.01.2003 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ | 1996 |
|
RU2219077C2 |

