Изобретение относится к области машиностроения и предназначено для арретирования и разарретирования (фиксации и освобождения) валов электродвигателей приводов аэродинамических рулей управляемых авиационных ракет как при их технологических проверках, так и при их пуске с самолета. Оно также может быть использовано в приводах различного рода машин и механизмов для дистанционного арретирования и разарретирования валов электродвигателей указанных приводов.
Известны арретирующие устройства весов, гироскопов и подвижных частей приборов и инструментов, позволяющие производить дистанционное разарретирование их подвижных частей.
Известен арретир (см. патент РФ №2010364 от 03.30.1992 г.), включающий механизм фиксации, содержащий подвижную и неподвижную части, выполненный в виде опоры с корпусом, в котором размещена подвижная часть в виде подпружиненных разжимных элементов, соединенных с механизмом их перемещения, отличающийся тем, что корпус неподвижной части механизма фиксации снабжен воздуховодом, соединенным с воздухосборником с мембраной, электромагнитом с сердечником и пробойником, установленным на сердечнике электромагнита снаружи воздухосборника, при этом в корпусе выполнены два взаимно перпендикулярных канала, в одном из которых размещены подпружиненные разжимные элементы подвижной части механизма фиксации, выполненные в виде соосно установленных плунжеров, между которыми расположен слой гидропласта, плунжеры выполнены со сферообразными концами и с пальцами, на концах которых установлены подпружиненные один относительно другого сегменты с тороидальной наружной поверхностью и со сферической внутренней поверхностью с обеспечением контактирования с наружной поверхностью сферообразных концов плунжеров, другой канал корпуса неподвижной части механизма фиксации соединен с воздуховодом посредством подпружиненного поршня, установленного в нем с возможностью взаимодействия со слоем гидропласта.
Достоинством устройства является возможность арретирования объекта, на который воздействуют значительные ударные и вибрационные нагрузки, которые характерны и для нагружения приводов аэродинамических рулей управляемых ракет при их совместном полете с самолетом-носителем. Однако недостатками этого устройства являются его сложность и возможность только единовременного разарретирования, в то время как в процессе испытаний, периодических проверок и подготовки ракет к пуску возникает необходимость в неоднократном арретировании - разарретировании.
Известен электромеханический арретир (см. патент РФ №1829575 от 08.27.2005 г.) гироскопа в кардановом подвесе, содержащий корпус, электромагнит, якорь которого кинематически через плоскую пружину соединен с подпружиненным рычагом фиксатора, а также профилированный кулачок, отличающийся тем, что он снабжен вторым якорем, выполненным в виде ступенчатой втулки с пазом на свободной торцевой поверхности, причем плоская пружина одним концом жестко закреплена на оси рычага, а другим установлена в пазу втулки и контактирует с торцом первого якоря, размещенного коаксиально второму и внутри него. Недостатком данного устройства является необходимость в энергопотреблении при арретированном положении гироскопа.
Известно также арретирующее устройство (см. патент РФ №477652 от 20.08.2005 г.), содержащее силовой электромагнит с якорем и цепью питания с микропереключателями, подпружиненные шток и защелку и включающее механический переключатель, выполненный в виде коромысла с двумя профильными поверхностями, шарнирно соединенного одним плечом со штоком, снабженным зубом и контактной пластиной, связанной с микропереключателями, а другим плечом - с защелкой, взаимодействующей с зубом штока, и подпружиненную тягу, шарнирно соединенную с якорем электромагнита и снабженную роликом, взаимодействующим с профильными поверхностями коромысла. Данное устройство является наиболее близким аналогом предлагаемого изобретения.
Недостатком данного устройства является ненадежность его функционирования в условиях вибрационного и ударного нагружения.
Задачей изобретения является создание компактного арретирующего устройства малого энергопотребления для объектов с повышенными вибрационными и ударными нагрузками, какими являются авиационные управляемые ракеты.
Техническим результатом изобретения является исключение энергопотребления арретирующего устройства в конечных состояниях (в арретированном и разарретированном состоянии) и уменьшение габаритных размеров арретирующего устройства для электропривода руля ракеты.
Решение поставленной задачи достигается тем, что в арретире рулевого электропривода ракеты, включающем неподвижную часть с катушками, подвижную часть и фиксатор вала электропривода, кинематически связанный с подвижной частью, неподвижная часть выполнена в виде полого статора с двумя полюсами и расположенными на них двумя катушками и снабженного двумя постоянными магнитами, а подвижная часть выполнена в виде установленного в полости статора на оси неполноповоротного динамически сбалансированного ротора, кинематически связанного с фиксатором для фиксации или освобождения вала электропривода при прямом или обратном повороте ротора при подаче импульса тока на одну или другую катушку, причем статор снабжен двумя упорами для ограничения поворотов ротора и обеспечения магнитного зазора между ротором и постоянными магнитами, которые ориентированы вдоль оси ротора преимущественно параллельно двум боковым смежным им граням ротора, расположенным со стороны катушек.
Ротор снабжен выступом на наружной поверхности ротора на ближней к катушкам стороне, а фиксатор вала выполнен в виде поворотного двуплечего рычага, установленного на оси, параллельной оси вала электропривода с обеспечением взаимодействия одного конца рычага с выступом на роторе, а второго с валом электропривода.
Ротор и двуплечий фиксирующий рычаг динамически сбалансированы относительно своих осей для обеспечения надежности удержания ротора в фиксированном положении в условиях вибрационного и ударного нагружения ракеты, характерном как для процесса совместного полета с носителем, так и при отделении ракеты от самолета.
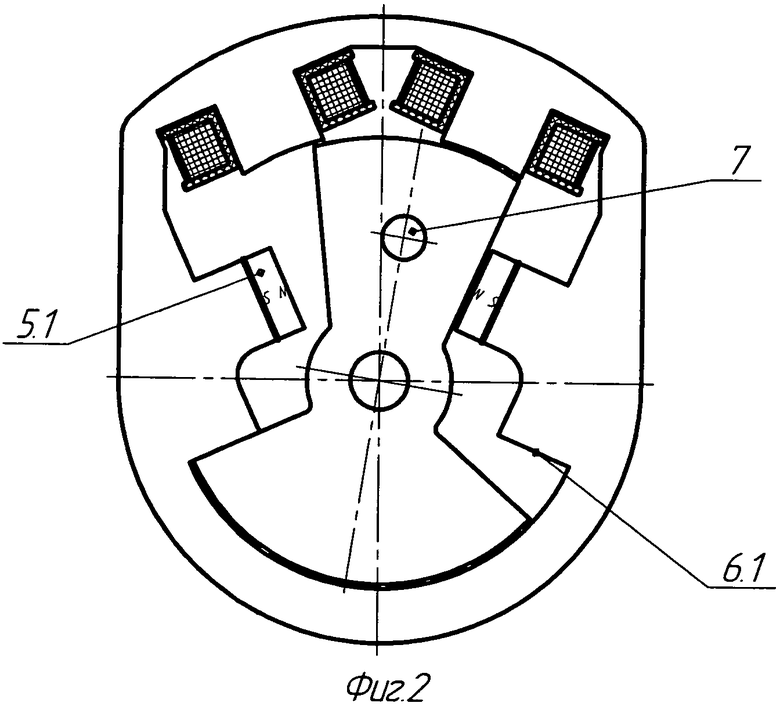
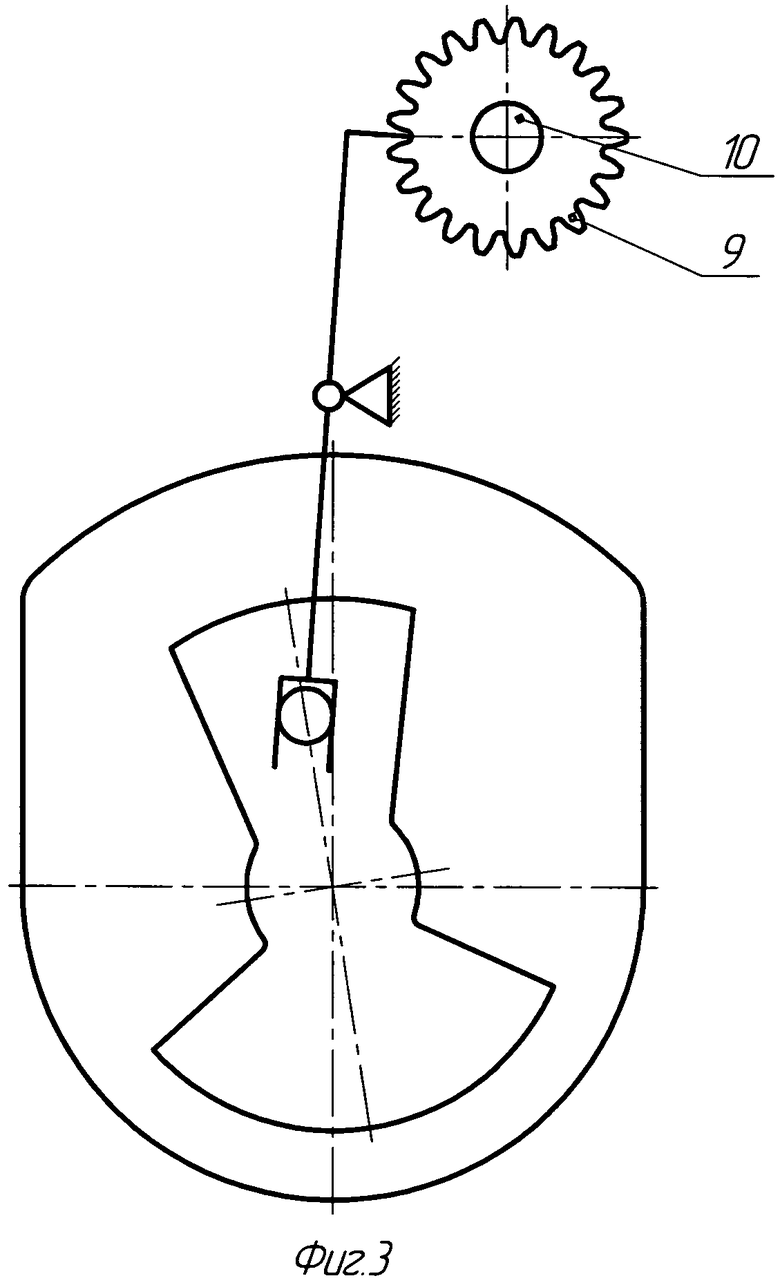
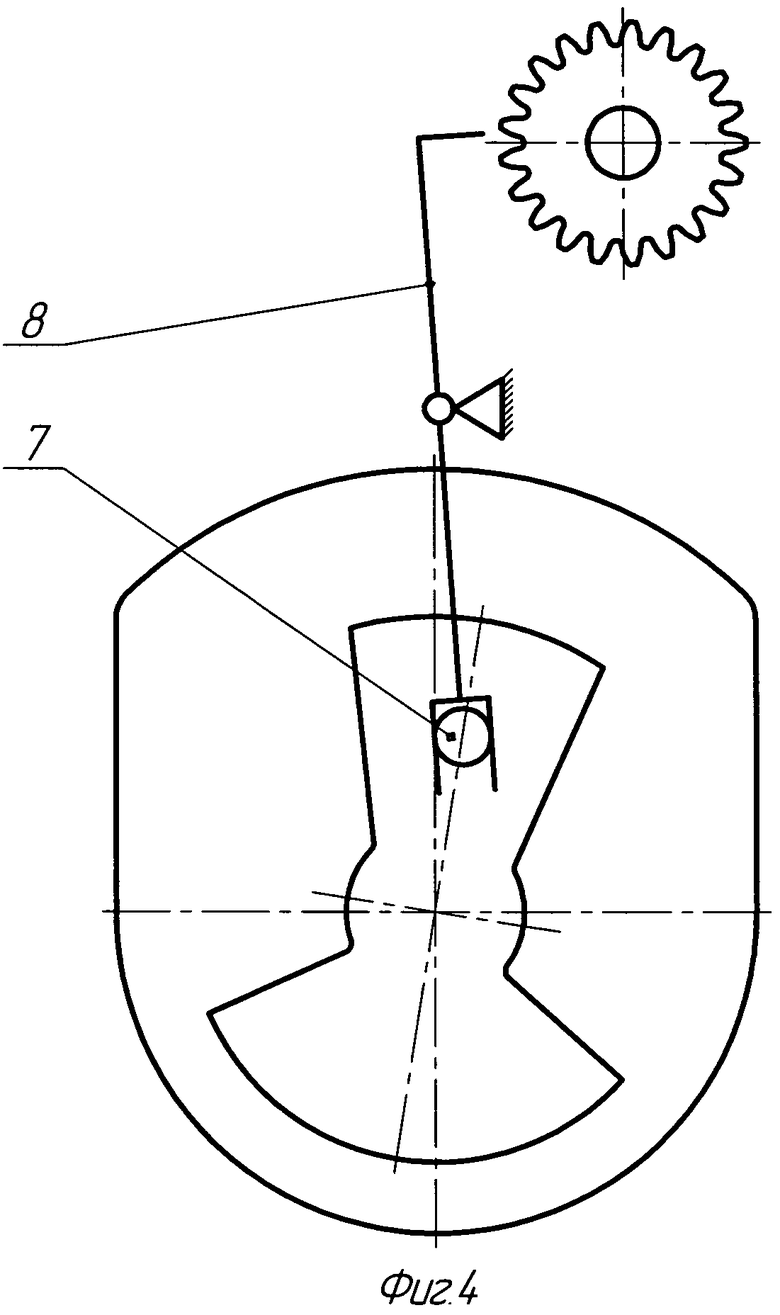
На Фиг.1-2 представлены два положения (соответствующие арретированному и разарретированному состояниям вала электродвигателя соответственно) взаиморасположения основных элементов арретира (статора и ротора), а на Фиг.3-4 показана кинематическая связь (для указанных двух положений) между ротором и валом электродвигателя электропривода, подлежащего фиксации.
Арретир состоит из статора 1 и расположенного в нем ротора 2, установленного с возможностью поворота на оси 3. На 2-х полюсах статора 1 размещены катушки 4.1 и 4.2. На статоре 1 со стороны указанных катушек с обеих сторон ротора 2 закреплены два постоянных магнита 5. и 5.2, каждый из которых ориентирован параллельно противолежащей (смежной) грани ротора (в положении, когда ротор повернут к данному магниту).
На противоположной стороне статора 1 выполнены упоры 6.1 и 6.2. Ротор 2 снабжен выступающим штифтом 7, закрепленным в роторе параллельно оси 3 со смещением относительно указанной оси.
Штифт 7 кинематически связан (см. Фиг.3, 4) посредством поворотного двуплечего фиксирующего рычага 8 с шестерней 9 подлежащего фиксации вала 10 электродвигателя электропривода руля (вал 10 является входным валом редуктора электропривода руля, выходным валом которого является собственно вал рулевой поверхности, не показано).
Устройство имеет два устойчивых положения ротора 2, соответствущие арретированному (Фиг.1) и разарретированному (Фиг.2) положению вала 10 электродвигателя электропривода руля. В этих положениях ротор 2 удерживается либо за счет силы притяжения постоянного магнита 5.1, либо постоянного магнита 5.2 соответственно. Упоры 6.1 и 6.2 обеспечивают требуемые углы поворота ротора 2 и необходимые магнитные зазоры между постоянными магнитами 5 и ротором 2.
Арретир функционирует следующим образом. Пусть в исходном положении ротор 2 занимает положение, изображенное на Фиг.1, соответствующее арретированному (фиксированному) положению вала 10, когда зубья его шестерни 9 находятся в зацеплении с зубцом на свободном конце поворотного рычага 8. Для осуществления разарретирования (освобождения) вала 10 через катушку 4.2 пропускается импульс тока и ротор поворачивается вокруг оси 3 (до упора 6.2) в положение, изображенное на Фиг.2. Величина и направление тока, пропускаемого по катушке 4.2, выбираются таким образом, чтобы потокосцепление с ротором превышало потокосцепление ротора с полем постоянного магнита 5.1.
При этом повороте ротора 2 его штифт 7 поворачивает фиксирующий рычаг 8 и зуб на его свободном конце выходит из зацепления с зубьями шестерни 9 вала 10 электродвигателя, т.е. вал 10 свободен.
При осуществлении арретирования вала 10 через катушку 4.1 пропускается импульс тока и ротор поворачивается вокруг оси 3 (до упора 6.1) в исходное положение, изображенное на Фиг.1. Величина и направление тока, пропускаемого по катушке 4.1, выбираются аналогично вышеизложенному, т.е. чтобы потокосцепление с ротором превышало потокосцепление ротора с полем постоянных магнитов 5.2. В процессе этого поворота ротора 2 его штифт 7 поворачивает фиксирующий рычаг 8 в исходное положение, в котором зуб на его свободном конце входит в зацепление с зубьями шестерни 9 вала 10 электродвигателя, в результате чего указанный вал фиксируется.
Предлагаемая компоновка арретира обеспечивает его компактность, что существенно при использовании его в составе авиационных ракет, а конструктивное обеспечение динамической сбалансированности поворотных частей арретира обеспечивает надежность его срабатывания в различных полетных условиях.
При этом предлагаемое устройство характеризуется минимальным энергопотреблением, поскольку энергия бортовых источников в данном устройстве расходуется по существу только на «перебрасывание» ротора из одного крайнего положения в другое.
| название | год | авторы | номер документа |
|---|---|---|---|
| АРРЕТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ЭЛЕКТРОДВИГАТЕЛЯ ПРИВОДА РУЛЯ РАКЕТЫ | 2010 |
|
RU2427798C1 |
| Блокирующее устройство электропривода | 2017 |
|
RU2657350C1 |
| УСТРОЙСТВО АРРЕТИРОВАНИЯ РОТОРА ЭЛЕКТРОДВИГАТЕЛЯ-МАХОВИКА В МАГНИТНОМ ПОДВЕСЕ | 2016 |
|
RU2645023C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА НАКЛОНА ОСНОВАНИЯ | 1969 |
|
SU257769A1 |
| Система арретирования оптико-электронной аппаратуры на носителе | 2021 |
|
RU2778461C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2131028C1 |
| АРРЕТИРУЮЩЕЕ УСТРОЙСТВО | 2013 |
|
RU2540445C1 |
| ДАТЧИК ЗЕНИТНОГО И АЗИМУТАЛЬНОГО УГЛОВ | 1991 |
|
RU2026975C1 |
| УСТРОЙСТВО АРРЕТИРОВАНИЯ РОТОРА ЭЛЕКТРОДВИГАТЕЛЯ-МАХОВИКА В МАГНИТНОМ ПОДВЕСЕ | 2014 |
|
RU2574497C1 |
Изобретение относится к области машиностроения и предназначено для арретирования и разарретирования валов электроприводов аэродинамических рулей управляемых авиационных ракет как при их технологических проверках, так и при их пуске с самолета. Арретир включает неподвижную часть с катушками, подвижную часть и фиксатор вала электропривода, кинематически связанный с подвижной частью. Неподвижная часть выполнена в виде полого статора с двумя полюсами и расположенными на них двумя катушками и снабженного двумя постоянными магнитами. Подвижная часть выполнена в виде установленного в полости статора на оси неполноповоротного динамически сбалансированного ротора, кинематически связанного с фиксатором для фиксации или освобождения вала рулевого электропривода при прямом или обратном повороте ротора при подаче импульса тока на одну или другую катушку. Статор снабжен двумя упорами для ограничения поворотов ротора и обеспечения магнитного зазора между ротором и постоянными магнитами, которые ориентированы вдоль оси ротора преимущественно параллельно двум боковым смежным им граням ротора, расположенным со стороны катушек. Достигается уменьшение габаритных размеров арретирующего устройства для электропривода руля ракеты. 1 з.п. ф-лы, 4 ил.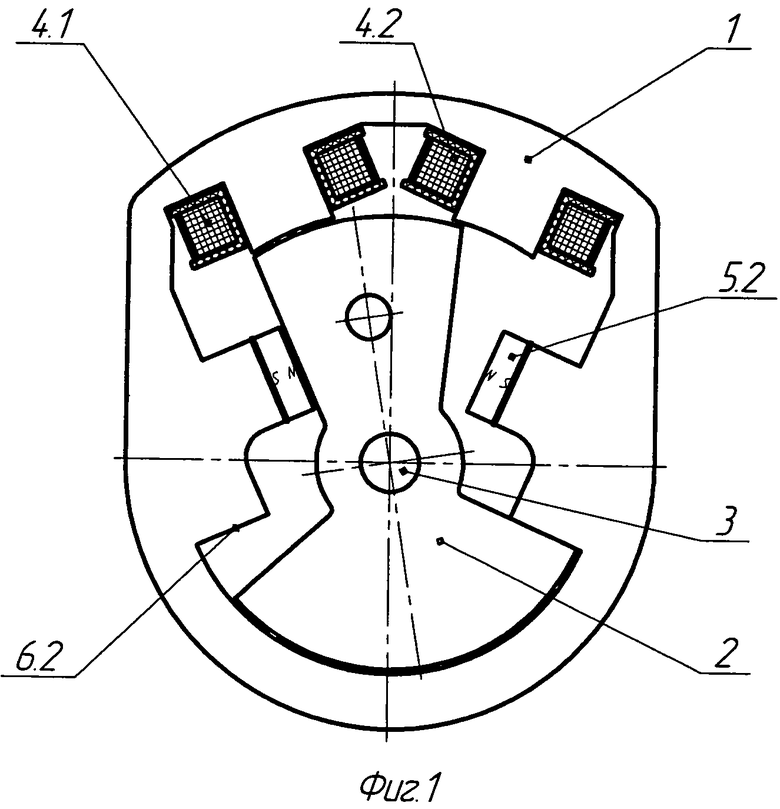
1. Арретир рулевого электропривода ракеты, включающий неподвижную часть с катушками, подвижную часть и фиксатор вала электропривода, кинематически связанный с подвижной частью, отличающийся тем, что неподвижная часть выполнена в виде полого статора с двумя полюсами и расположенными на них двумя катушками, снабженного двумя постоянными магнитами, а подвижная часть выполнена в виде установленного в полости статора на оси неполноповоротного динамически сбалансированного ротора, кинематически связанного с фиксатором для фиксации или освобождения вала рулевого электропривода при прямом или обратном повороте ротора при подаче импульса тока на одну или другую катушку, причем статор снабжен двумя упорами для ограничения поворотов ротора и обеспечения магнитного зазора между ротором и постоянными магнитами, которые ориентированы вдоль оси ротора преимущественно параллельно двум боковым смежным им граням ротора, расположенным со стороны катушек.
2. Арретир рулевого электропривода ракеты по п.1, отличающийся тем, что ротор снабжен выступом на наружной поверхности ротора на ближней к катушкам стороне, а фиксатор вала выполнен в виде поворотного двуплечего рычага, установленного на оси, параллельной оси вала электропривода с обеспечением взаимодействия одного конца рычага с выступом на роторе, а второго - с валом электропривода.
| АРРЕТИРУЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU477652A1 |
| Арретирующее устройство | 1989 |
|
SU1658312A1 |
| DE 202004016988 U1, 09.03.2006 | |||
| US 3610052 A, 05.10.1971. | |||

