Изобретение относится к точному приборостроению и предназначено для позиционирования оптико-электронных приборов на носителе с ограничением по пяти степеням свободы.
Известны несколько систем схожего типа функционирования. Например, устройство арретирования описанное в патенте RU №2 315 952 С1, МПК G01C 19/26, опубликованном 27.01.2008. Изобретение относится к фиксирующим устройствам гироскопических или оптических приборов, стопорящихся при транспортировке и дистанционно освобождающихся при эксплуатации, например, после вывода космического аппарата на орбиту. В устройстве арретирования дистанционного выключения подвижной рамы, устанавливаемой на корпусе объекта, кинематическая связь выполнена в виде шарнирно установленного на корпусе объекта трехплечевого рычага, одно из плеч которого соединено со штыревым фиксатором, другое выполнено взаимодействующим с регулируемым упором, а третье соединено с трехзвенным шарнирным механизмом, два звена которого образуют складывающуюся диаду, а на третьем закреплен привод в виде электрочеки, шток которой кинематически связан со звеном диады. При этом на штыревом фиксаторе установлен резьбовой ограничитель, опертый о фланец рамы. Представленная конструкция способна обеспечить подвижки арретируемого объекта в достаточно узком пространстве в разарретированном состоянии. Но данное устройство является достаточно сложным, так как имеет в своем составе большое количество подвижных элементов (рычагов). Также данное устройство арретирования способно работать в автоматическом режиме только на разарретирование.
Наиболее близким механизмом к предлагаемому изобретению является арретирующее устройство для гироплатформ, описанное в авторском свидетельстве SU №293174 А1, МПК G01C 19/26, опубликованном 15.01.1971. Изобретение относится к области гироскопического приборостроения. Данное устройство состоит из силового привода, взаимодействующего с управляющим устройством, выполненным в виде кулачка, который в свою очередь взаимодействует с исполнительным механизмом, выполненным в виде двух арретирующих рычагов с фиксаторами. Кроме того, каждый арретирующий рычаг с фиксатором взаимодействует с разарретирующими пружинами и упругой развязкой, выполненной в виде фигурной плоской пружины. Арретирующие рычаги связаны с объектом установки арретируемого объекта в виде подвижной рамы с жестко закрепленными на ней кулачками ловителями. Представленное арретирующее устройство позволяет арретируемому объекту перемещаться в небольшом пространстве в разарретированном состоянии из-за конструкции рычагов и кулачков ловителей. Но данная конструкция требует точного изготовления кулачка, рычагов и кулачков-ловителей для фиксирования арретируемого объекта в определенном положении.
Задачей данного изобретения является повышение эксплуатационных характеристик системы арретирования.
Технический результат - создание системы арретирования обеспечивающей жесткую связь арретируемого объекта с корпусом только при заарретированном положении и свободное перемещение по всем степеням свободы в остальное время, при простой конструкции, без жестких требований по точности к деталям исполнительного механизма, при обеспечении перемещения арретируемого объекта в разарретированном состоянии в максимально большом пространстве и способности в автоматическом режиме как разарретировать объект, так и заарретировать его.
Это достигается тем, что в системе арретирования оптико-электронной аппаратуры на носителе, включающей в себя корпус с установленным на нем электродвигателем, воздействующим на управляющее устройство, приводящее в движение исполнительный механизм, перемещающий подвижную раму, жестко связанную с арретируемым объектом и соединенную с корпусом через упругую развязку, в отличие от известного, винтовая передача, выполняющая роль управляющего устройства и состоящая из винтовой оси и двух гаек, двигающихся в противоположных направлениях, четырех кривошипно-шатунных механизмов, выполняющих роль исполнительного механизма, состоящих из шатунов шарнирно закрепленных на корпусе и кривошипов цилиндрической формы, шарнирно закрепленных попарно на гайках винтовой передачи и пластины со сферической поверхностью являющейся составной частью подвижной рамы.
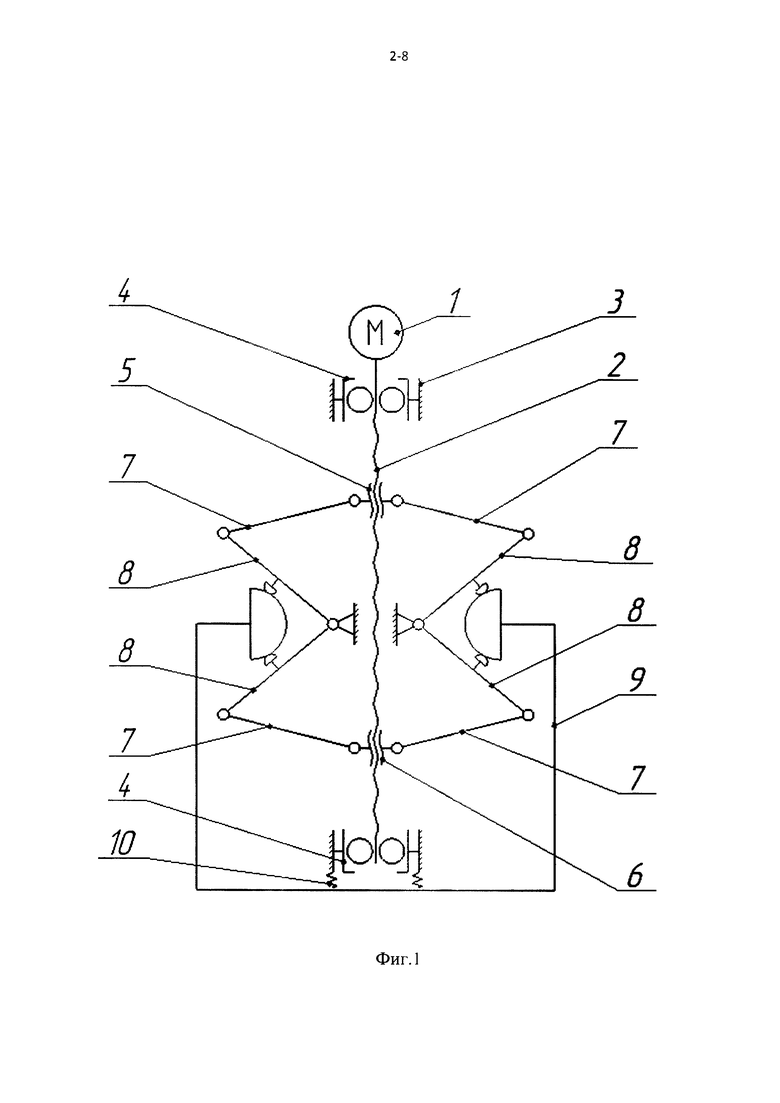
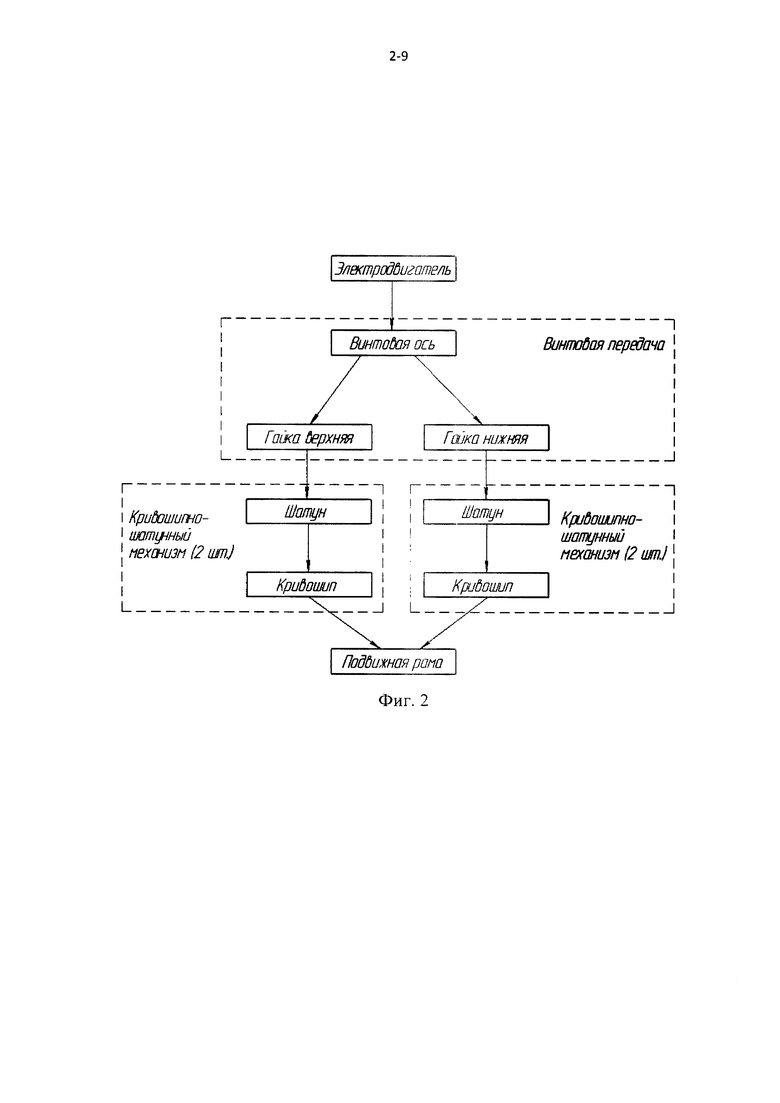
Изобретение поясняется чертежами, где на фиг. 1 показана кинематическая схема системы арретирования, а на фиг. 2 - схема взаимодействия узлов системы арретирования.
Система арретирования (фиг. 1, 2) включает в себя электродвигатель 1, управляемый внешней системой управления (на фиг. не показана), взаимодействующий с управляющим устройством, выполненным в виде винтовой передачи, состоящей из винтовой оси 2, закрепленной в корпусе 3 на двух подшипниковых опорах 4 (тип и количество подшипников определяется массой и габаритами полезной нагрузки). Корпус 3 жестко закреплен на носителе. Роль исполнительного механизма выполняют четыре кривошипно-шатунных механизма. Для этого на винтовой оси 2 установлены верхняя гайка 5 и нижняя гайка 6, каждая из которых соединена с двумя кривошипно-шатунными механизмами, каждый из которых, в свою очередь, состоит из шатуна 7 и кривошипа 8 цилиндрической формы. Шатуны 7 попарно соединены с верхней гайкой 5 и нижней гайкой 6. Кривошипы 8 взаимодействуют с подвижной рамой через пластину 9 со сферической поверхностью и жестко связанную с арретируемым объектом. Между корпусом 3 и пластиной 9 со сферической поверхностью установлена упругая развязка 10, представляющая из себя амортизатор либо пружину.
Работает устройство следующим образом. При заарретировании электродвигатель 1 вращает винтовую ось 2 закрепленную в корпусе 3 на двух подшипниковых опорах 4 (тип и количество подшипников определяется массой и габаритами полезной нагрузки). Винтовая ось 2 посредством винтовой передачи преобразует свое вращательное движение в поступательное движение верхней гайки 5 и нижней гайки 6. Так как верхняя гайка 5 имеет правую резьбу, а нижняя гайка 6 - левую, то они движутся в противоположных направлениях, навстречу друг к другу. Движение гаек 5 и 6 заставляет кривошипно-шатунные механизмы изменять свое угловое положение относительно винтовой оси 2 и посредством кривошипов 8 перемещать пластину 9 со сферической поверхностью до тех пор, пока пластина 9 со сферической поверхностью не будет зажата с нижней и верхней стороны кривошипами 8. При разарретировании электродвигатель 1 вращает винтовую ось 2 закрепленную в корпусе 3 на двух подшипниковых опорах 4 в сторону обратную повороту при заарретировании. Винтовая ось 2 посредством винтовой передачи преобразует свое вращательное движение в поступательное движение верхней гайки 5 и нижней гайки 6. Так как верхняя гайка 5 имеет правую резьбу, а нижняя гайка 6 - левую, то они движутся в противоположных направлениях, друг от друга. Движение гаек 5 и 6 заставляет кривошипно-шатунные механизмы изменять свое угловое положение относительно винтовой оси 2, тем самым отводя кривошипы 8 от пластины 9 со сферической поверхностью, до тех пор, пока положение пластины 9 со сферической поверхностью не станет определяться только упругой развязкой 10.
Использование винтовой передачи позволяет применить электродвигатель с меньшим вращающим моментом и обеспечивает фиксацию механизма при неработающем электродвигателе без применения дополнительных упругих элементов, что повышает жесткость и надежность конструкции. А использование четырех кривошипно-шатунных механизмов обеспечивает фиксацию по пяти степеням свободы. Использование кривошипов цилиндрической формы и пластины со сферической поверхностью, входящей в подвижную раму, позволяет минимизировать площадь контакта между кривошипами и пластиной, что позволяет снизить требования по точности изготовления к данным деталям и исключает заклинивания при работе системы.
Таким образом, обеспечивается достижение технического результата, а именно возможность перемещения арретируемого объекта по всем степеням свободы в разарретированном состоянии с возможностью в дальнейшем заарретировать его за счет использования четырех кривошипно-шатунных механизмов, расположенных на одной винтовой оси, два из которых двигаются в противоход двум другим, и способность в автоматическом режиме как разарретировать объект, так и заарретировать его.
| название | год | авторы | номер документа |
|---|---|---|---|
| Арретирующее устройство трехстепенногогиРОСКОпА | 1979 |
|
SU836523A1 |
| Магнитный арретир | 1978 |
|
SU801107A1 |
| УСТРОЙСТВО АРРЕТИРОВАНИЯ | 2006 |
|
RU2315952C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| АРРЕТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ЭЛЕКТРОДВИГАТЕЛЯ ПРИВОДА РУЛЯ РАКЕТЫ | 2010 |
|
RU2427798C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2131028C1 |
| АРРЕТИР РУЛЕВОГО ЭЛЕКТРОПРИВОДА РАКЕТЫ | 2010 |
|
RU2426071C1 |
| Дугогасящий реактор и способ регулирования немагнитного зазора дугогасящего реактора | 2019 |
|
RU2704315C1 |
| АРРЕТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ГИРОПЛАТФОРМ | 1971 |
|
SU293174A1 |
| УСТРОЙСТВО АРРЕТИРОВАНИЯ РОТОРА ЭЛЕКТРОДВИГАТЕЛЯ-МАХОВИКА В МАГНИТНОМ ПОДВЕСЕ | 2014 |
|
RU2574497C1 |
Изобретение относится к точному приборостроению и предназначено для позиционирования оптико-электронных приборов на носителе с ограничением по пяти степеням свободы. Заявленная система арретирования оптико-электронной аппаратуры на носителе включает в себя корпус с установленным на нем электродвигателем, воздействующим на управляющее устройство, приводящее в движение исполнительный механизм, перемещающий подвижную раму, жестко связанную с арретируемым объектом и соединенную с корпусом через упругую развязку, а также винтовую передачу, выполняющую роль управляющего устройства и состоящую из винтовой оси и двух гаек, двигающихся в противоположных направлениях, четырех кривошипно-шатунных механизмов, выполняющих роль исполнительного механизма, состоящих из шатунов, шарнирно закрепленных на корпусе, и кривошипов цилиндрической формы, шарнирно закрепленных попарно на гайках винтовой передачи, и пластины со сферической поверхностью, являющейся составной частью подвижной рамы. Технический результат - создание системы арретирования, обеспечивающей жесткую связь арретируемого объекта с корпусом только при заарретированном положении и свободное перемещение по всем степеням свободы в остальное время, при простой конструкции, без жестких требований по точности к деталям исполнительного механизма, при обеспечении перемещения арретируемого объекта в разарретированном состоянии в максимально большом пространстве и способность в автоматическом режиме как разарретировать объект, так и заарретировать его. 2 ил.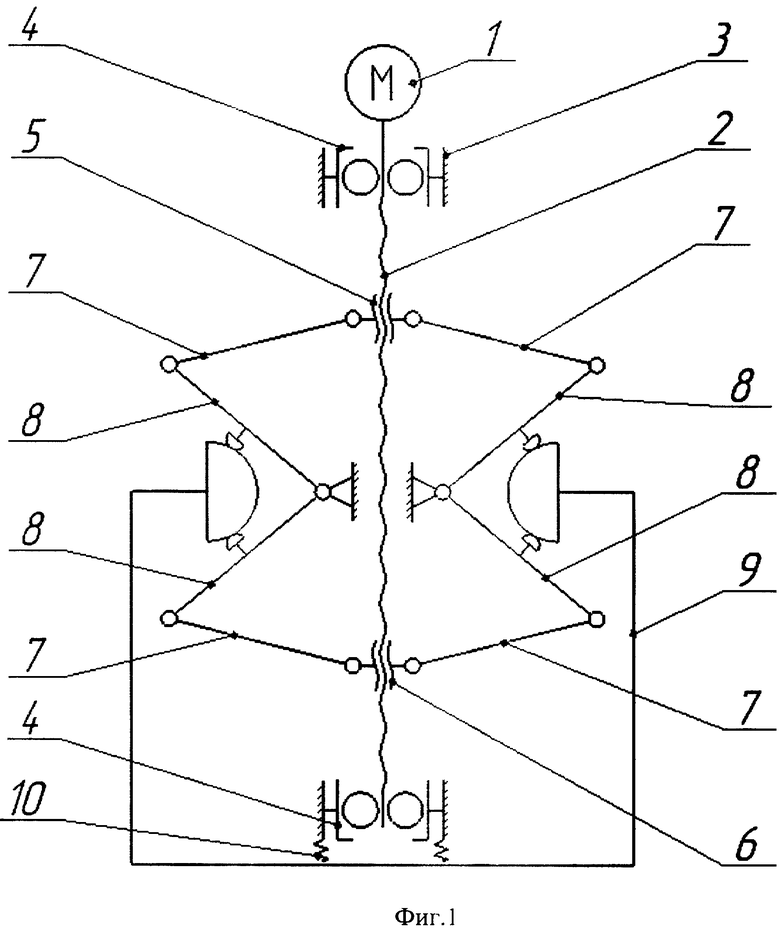
Система арретирования оптико-электронной аппаратуры на носителе, включающая в себя корпус с установленным на нем электродвигателем, воздействующим на управляющее устройство, приводящее в движение исполнительный механизм, перемещающий подвижную раму, жестко связанную с арретируемым объектом и соединенную с корпусом через упругую развязку, отличающаяся наличием винтовой передачи, выполняющей роль управляющего устройства и состоящей из винтовой оси и двух гаек, двигающихся в противоположных направлениях, четырех кривошипно-шатунных механизмов, выполняющих роль исполнительного механизма, состоящих из шатунов, шарнирно закрепленных на корпусе, и кривошипов цилиндрической формы, шарнирно попарно закрепленных на гайках винтовой передачи, и пластины со сферической поверхностью, являющейся составной частью подвижной рамы.
| АРРЕТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ГИРОПЛАТФОРМ | 0 |
|
SU293174A1 |
| АРРЕТИРУЮЩЕЕ УСТРОЙСТВО | 2013 |
|
RU2540445C1 |
| УСТРОЙСТВО АРРЕТИРОВАНИЯ | 2006 |
|
RU2315952C1 |
| АРРЕТИРУЮЩЕЕ УСТРОЙСТВО ТРЕХСТЕПЕННОГО ГИРОСКОПА В КАРДАННОМ ПОДВЕСЕ | 1988 |
|
SU1552771A1 |
| Способ электролитического получения сплава никель-хром | 1960 |
|
SU136992A1 |

