ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к преобразователям систем питания постоянного тока, способу преобразования и, в частности, к резонансному преобразователю постоянного тока и к способу управления таким преобразователем.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В настоящее время миниатюризация и высокочастотная техника определяют тенденцию развития источников электропитания. Однако увеличение частоты переключения приводит к большим потерям в переключающем устройстве, и это не может быть решено применением обычного вольтодобавочного преобразователя, тогда как резонансный преобразователь может должным образом решить эту проблему. Возьмем, как пример, резонансный преобразователь напряжения постоянного тока, который основан на резонансном способе преобразования. Поскольку резонансный элемент работает в синусоидальном режиме резонанса, переключение напряжения через переключающее устройство является естественной коммутацией при нулевом токе, реализуя, таким образом, переключение при нуле напряжения и обеспечивая очень малые потери электроэнергии. В этой топологии обычно используется способ частотно-импульсной модуляции (ЧИМ), стабилизируя выходное напряжение и изменяя рабочую частоту.
На фиг.1 представлена принципиальная схема полумоста резонансного преобразователя напряжения постоянного тока серии SRC. Когда резонансный контур управляется по способу ЧИМ, два переключающих устройства S1 и S2 соединены комплиментарно и симметрично и соответственно включены на 50% цикла переключения (что является идеальным значением, и должен быть немного меньше 50% с учетом наличия мертвой зоны). Соотношение между усилением выходного напряжения источника питания М и рабочей частотой f дается выражением
в котором V0 и Vin - выходное и входное напряжения, соответственно, f - рабочая частота
fr - резонансная частота, Lr - резонансная индуктивность, Cr - резонансная емкость и Ро - выходная мощность.
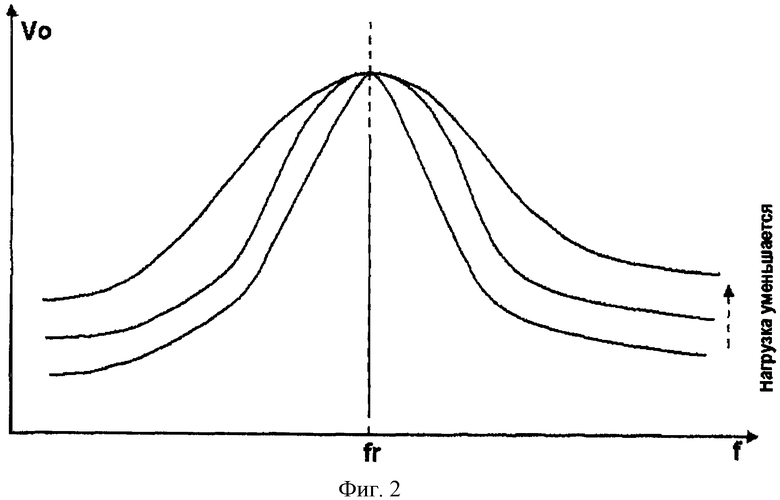
Как можно видеть из формулы (1), когда рабочая частота f выше резонансной частоты, то чем выше рабочая частота, тем ниже повышение напряжения М. Аналогичным образом, когда рабочая частота f меньше резонансной частоты, чем ниже рабочая частота, тем меньше увеличение напряжения М. Кривая соотношения топологии последовательного резонанса управляющей частоты f и выходного напряжением V0 показана на фиг.2. Основная проблема при использовании последовательного резонансного преобразователя состоит в том, что выходное напряжение трудно стабилизировать в условиях небольшой нагрузки или без нагрузки. Когда управляющая частота больше резонансной частоты fr, выходное напряжение последовательной резонансной топологии уменьшается по мере увеличения управляющей частоты, и выходное напряжение имеет тенденцию сглаживания, когда нагрузка уменьшается. Следовательно, рабочая частота должна увеличиться на достаточно большую величину, чтобы стабилизировать напряжение. Однако слишком широкий диапазон рабочей частоты связан с трудностью оптимизации магнитного устройства, и чем выше рабочая частота, тем больше потерь в схеме. Кроме того, когда нагрузка близка к нулю, выходное напряжение может повыситься вместо снижения, приводя, таким образом, к невозможности управления отрицательной обратной связью. Соответственно, в области промышленного электропитания кое-кто использует фиксированную нагрузку на выходном конце, чтобы стабилизировать выходное напряжение при условии малой и нулевой нагрузки.
Однако это может увеличить потери при нулевой нагрузке и снизить КПД системы электропитания.
В результате чисто импульсное регулирование частоты приводит к чрезмерному расширению диапазона рабочей частоты, даже к выходу оборудования из строя, и затрудняет оптимизацию магнитного устройства и создает большие потери в схеме, а также затрудняет проектирование системы с регулируемой обратной связью. Следовательно, простое частотно-модулированное управление не может удовлетворить потребность в стабилизации напряжения в условиях малой или нулевой нагрузки.
Недостаток способа частотно-модулированного режима управления в связи с полумостовой последовательной резонансной схемой напряжений мостика, и случай полномостовой последовательной резонансной схемой аналогичен случаю полумостовой последовательной резонансной схемой. В теории схем частотно-модулированного резонанса описываются подобные проблемы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является создание способа управления резонансным преобразователем постоянного тока и устройства для реализации этого способа с устранением недостатков известных технических решений, заключающихся в том, что если используется управление по переменной частоте, когда нагрузка является небольшой или нулевой, трудно оптимизировать магнитный элемент, и потери в схеме очень большие. Чтобы достичь этой цели, настоящее изобретение представляет собой способ управления резонансным преобразователем постоянного тока, в котором выходное напряжение регулируется, изменяя частоту включения входного переключающего устройства резонансного преобразователя, и расширяет диапазон выходного напряжения резонансной схемы, регулируя коэффициент заполнения переключающего устройства (устройств) на основе сигнала обратной связи цепи нагрузки.
Входное переключающее устройство (устройства) резонансной схемы может управляться управляющим импульсом через цепь управления, при этом формирование управляющего импульса содержит следующие стадии:
(1) получение сигнала обратной связи из цепи нагрузки;
(2) определение, работает ли устройство в режиме малой нагрузки или нулевой нагрузки, на основании сигнала обратной связи; и
(3) использование импульсного сигнала, в котором частота и коэффициент заполнения изменяются в зависимости от сигнала обратной связи, в качестве управляющего импульса цепи управления, если источник нагрузки работает в режиме малой или нулевой нагрузки с тем, чтобы резонансный контур работал в комбинированном режиме управления широтно-импульсной модуляцией (ШИМ) и частотно-импульсной модуляцией (ЧИМ); в другом случае используется импульсный сигнал, в котором коэффициент заполнения является постоянной величиной, а частота изменяется в зависимости от сигнала обратной связи как управляющий импульс цепи управления, чтобы получить резонансный контур, работающий в режиме управления ЧИМ.
Стадия (1) может дополнительно включать следующие стадии: (1а) отбор напряжения обратной связи из цепи нагрузки и (1b), создание напряжения обратной связи с компенсацией обратной связи, чтобы получить сигнал обратной связи.
Выбор управления ЧИМ и управления ЧИМ+ШИМ в вышеописанном режиме управления предпочтительно достигается следующим образом: на стадии (2) после процесса обработки сигнала обратной связи получают частотно-импульсный управляющий сигнал и широтно-импульсный модулирующий сигнал; при этом процесс обработки широтно-импульсного модулирующего сигнала включает сравнение с опорным сигналом 1, чтобы определить, работает ли источник нагрузки в режиме малой или нулевой нагрузки, в которой опорный сигнал 1 определяется в соответствии с электрической характеристикой нагрузки; на стадии (3) формируется управляющий импульс, регулируемый как частотно-импульсным управляющим сигналом, так и широтно-импульсным модулирующим сигналом, когда источник нагрузки работает в режиме малой или нулевой нагрузки; в другом случае формируется управляющий импульс, регулируемый только частотно-импульсным управляющим сигналом, при котором коэффициент заполнения является постоянной величиной.
Вышеупомянутый способ может дополнительно содержать выбор управления только с помощью широтно-импульсной модуляции:
на стадии (2) процесс обработки частотно-импульсным управляющим сигналом включает сравнение с опорным сигналом 2 для определения, работает ли источник нагрузки в режиме, приблизительно соответствующем отсутствию нагрузки, в которой опорный сигнал 2, определяется в соответствии с электрической характеристикой нагрузки, и опорный сигнал 2 удовлетворяет заданному условию, и, если на основании опорного сигнала 2 определено, что источник нагрузки работает в режиме, приблизительно соответствующем нулевой нагрузке, должно быть определено, что источник нагрузки работает при малой нагрузке или в режиме нулевой нагрузки на основании опорного сигнала 1;
на стадии (3), когда источник нагрузки работает в режиме, приблизительно соответствующем нулевой нагрузке, формируется управляющий импульс, регулируемый только широтно-импульсным модулирующим сигналом, при котором частота является постоянной величиной.
Цели настоящего изобретения достигаются, используя резонансный преобразователь постоянного тока, содержащий:
цепь управления и резонансный контур, при этом цепь управления управляет входным переключающим устройством (устройствами), резонансный контур управляется управляющим импульсом и передает преобразованное напряжение в цепь нагрузки под управлением схемы управления, и компенсационный регулятор с отрицательной обратной связью с коррекцией напряжения обратной связи, выбираемой из цепи нагрузки, чтобы получить сигнал обратной связи; и
дискриминатор для определения режима нагрузки цепи источника нагрузки, путем ввода сигнала обратной связи и сигнала модуляции запускающего импульса;
генератор управляющих импульсов для формирования и модулирования управляющего импульса на основе
входного сигнала модулирования управляющего импульса; если источник нагрузки работает в режиме малой или нулевой нагрузки, при этом коэффициент заполнения сформированного управляющего импульса регулируется в зависимости от изменения сигнала обратной связи; в другом случае, коэффициент заполнения сформированного управляющего импульса является постоянной величиной, а частота выходного управляющего импульса изменяется в зависимости от изменения сигнала обратной связи.
В альтернативном варианте управления ЧИМ и ЧИМ+ШИМ резонансного преобразователя постоянного тока используются два отдельных модуля цепи формирования управляющего сигнала: генератор управляющих импульсов содержит частотно-импульсную цепь управления и широтно-импульсную цепь модуляции; если дискриминатор определит, что источник нагрузки работает в режиме малой или нулевой нагрузки, частотно-импульсная цепь управления плюс широтно-импульсная цепь управления получают сигнал модуляции управляющего импульса, по которому частота и коэффициент заполнения нагрузки изменяются в зависимости от изменения сигнала обратной связи; в другом случае частотно-импульсная цепь управления получает сигнал модулирования управляющего импульса, который регулирует выход управляющего импульса, коэффициент заполнения является постоянной величиной, а частота изменяется в зависимости от изменения сигнала обратной связи.
В другом альтернативном варианте выполнения цепей управления ЧИМ и ЧИМ+ШИМ указанного резонансного преобразователя постоянного тока может быть использован только модуль формирования управляющего сигнала, который содержит: дискриминатор, включающий операционную цепь 1 и операционную цепь 2, в котором операционная цепь 1 выдает опорный сигнал 1, и при этом сигнал модулирования управляющего импульса включает частотно-импульсный управляющий сигнал и широтно-импульсный модулирующий сигнал, причем сигнал обратной связи выдается на выходе как широтно-импульсный модулирующий сигнал после обработки операционной цепью и после его сравнения с опорным сигналом 1; сигнал обратной связи выдается на выходе как частотно-импульсный управляющий сигнал после его обработки операционной цепью 2; в этом варианте опорный сигнал 1 определяется в соответствии с электрической характеристикой нагрузки, когда источник нагрузки работает в режиме малой или нулевой нагрузки; выданный широтно-импульсный модулирующий сигнал изменяется в зависимости от изменения сигнала обратной связи; в другом случае, этот сигнал имеет постоянную величину; генератор управляющих импульсов содержит частотно-импульсную цепь управления и широтно-импульсную цепь модуляции, в которой частотно-импульсная цепь управления формирует импульс переменной частоты, частота которого регулируется сигналом частотно-импульсной цепи управления, и широтно-импульсная цепь модуляции выдает на выходе управляющий импульс после того, как широтно-импульсная модуляция импульса переменной частоты осуществлена широтно-импульсным модулирующим сигналом.
Цепь широтно-импульсной модуляции может выдавать управляющий импульс после сравнения и объединения с широтно-импульсным модулирующим сигналом переменной частоты.
Также допустимо, чтобы импульс переменной частоты был бы введен в синхронизированный вывод цепи широтно-импульсной модуляции, и цепь широтно-импульсной модуляции выполняет широтно-импульсную модуляцию введенного импульса переменной частоты широтно-импульсным модулирующим сигналом и затем выдает управляющий импульс.
Чтобы обеспечить простое ШИМ-управление в режиме, который приблизительно соответствует режиму нулевой нагрузки, предпочтительно, чтобы операционная цепь 2 получила бы опорный сигнал 2; сигнал обратной связи формируется и сравнивается с опорным сигналом 2 операционной цепи 2, чтобы получить частотно-импульсный управляющий сигнал; опорный сигнал 2 определяется в соответствии с электрической характеристикой нагрузки так, что выданный частотно-импульсный управляющий сигнал является постоянной величиной, когда источник нагрузки работает в режиме, который приблизительно соответствует режиму нулевой нагрузки; в другом случае этот сигнал изменяется в зависимости от изменения сигнала обратной связи; при этом опорный сигнал 2 является удовлетворительным, если определено, что источник нагрузки работает в режиме, приблизительно соответствующем нулевой нагрузке на основе опорного сигнала 2, при этом нужно убедиться, что источник нагрузки работает при малой нагрузке или в режиме нулевой нагрузки на основе опорного сигнала 1. В частотно-импульсной цепи может быть использована конструкция, содержащая генератор, управляемый напряжением, и генератор треугольных импульсов, соединенные последовательно; при этом частотно-импульсный управляющий сигнал вводится в генератор управляемый напряжением и регулирует его частоту, а генератор треугольных импульсов выдает импульс, частота которого также регулируется. Техническое решение по настоящему изобретению имеет следующие преимущества:
(1) Режим управления ШИМ используется в способе управления резонансным преобразователем постоянного тока, обеспечивая два режима управления: ЧИМ и ЧИМ + ШИМ. Таким образом, способ управления ЧИМ используется, когда источник нагрузки работает в режиме относительно малой или нулевой нагрузки, а способ управления ЧИМ+ШИМ используется, когда источник нагрузки работает при высокой нагрузке. При этом частота может быть зафиксирована, когда в режиме управления ШИМ частота еще выше. Следовательно, проблема резонансного преобразователя решена, т.е. проблема, связанная с потерями в схеме при слишком высокой рабочей частоте в случае малой и нулевой нагрузки, повышая, таким образом, способность регулирования выходного напряжения резонансного контура и эффективно расширяя диапазон выходного напряжения.
(2) Два режима управления ЧИМ и ЧИМ+ШИМ логистически выборочно параллельны, и могут быть реализованы, выбирая режим, при котором частотно-импульсная цепь управления и цепь широтно-импульсной модуляции соединены последовательно. Предпочтительная схема устраняет необходимость использования многих логических элементов и многоканальных регуляторов компенсации отрицательной обратной связи, и, таким образом, она является оптимальной. Кроме того, переключение одного режима управления на другой происходит плавно, и надежность и динамическая характеристика этих двух режимов являются очень высокими.
Настоящее изобретение применимо к измененной топологии резонансного контура, такой как, полномостовой последовательный или параллельный резонансный контур, соединение по протоколу LLC и так далее, что имеет большое значение в области техники электропитания.
Настоящее изобретение будет далее описано более подробно со ссылками на сопровождающие чертежи и примеры воплощения изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - принципиальная схема известного полумостового последовательного преобразователя напряжения.
Фиг.2 - характеристики устройства фиг.1, работающего в режиме управления ЧИМ.
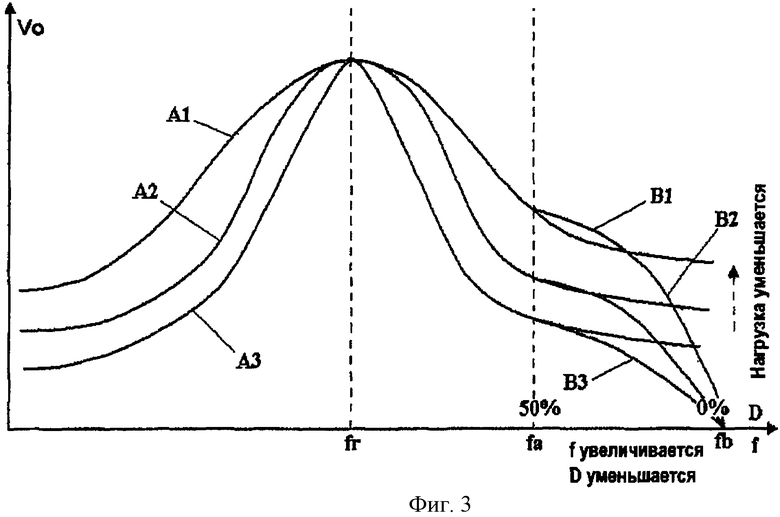
Фиг.3 - схема сравнения, иллюстрирующая выходные характеристики схемы фиг.1, которая управляется по способу управления согласно настоящему изобретению.
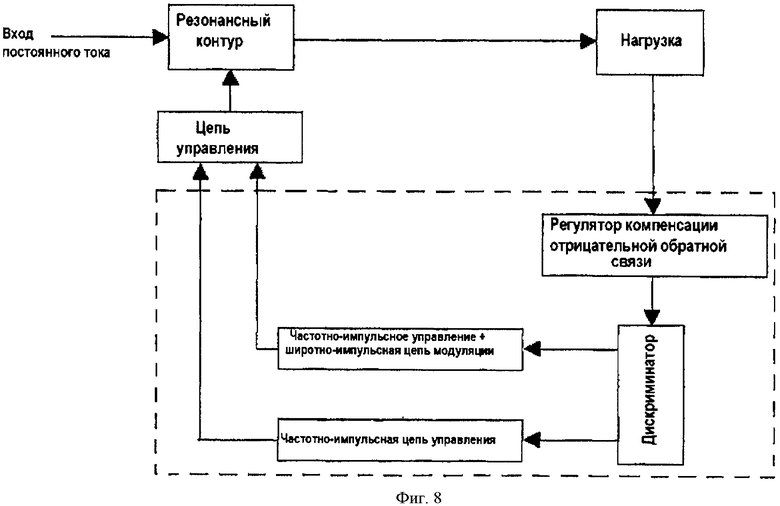
Фиг.4 - функциональная блок-схема преобразователя постоянного тока согласно настоящему изобретению.
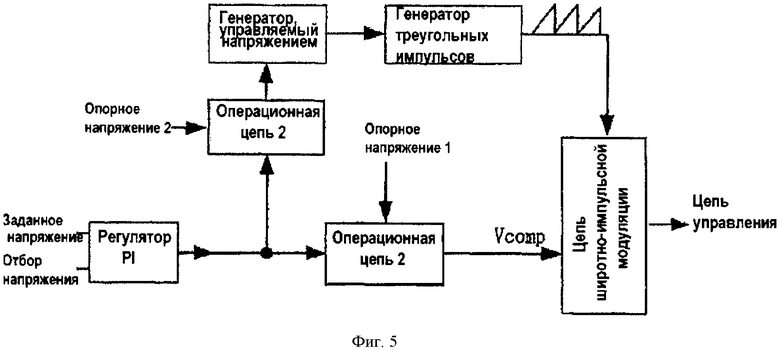
Фиг.5 - подробная блок-схема цепи, ограниченной штриховой линией на фиг.4.
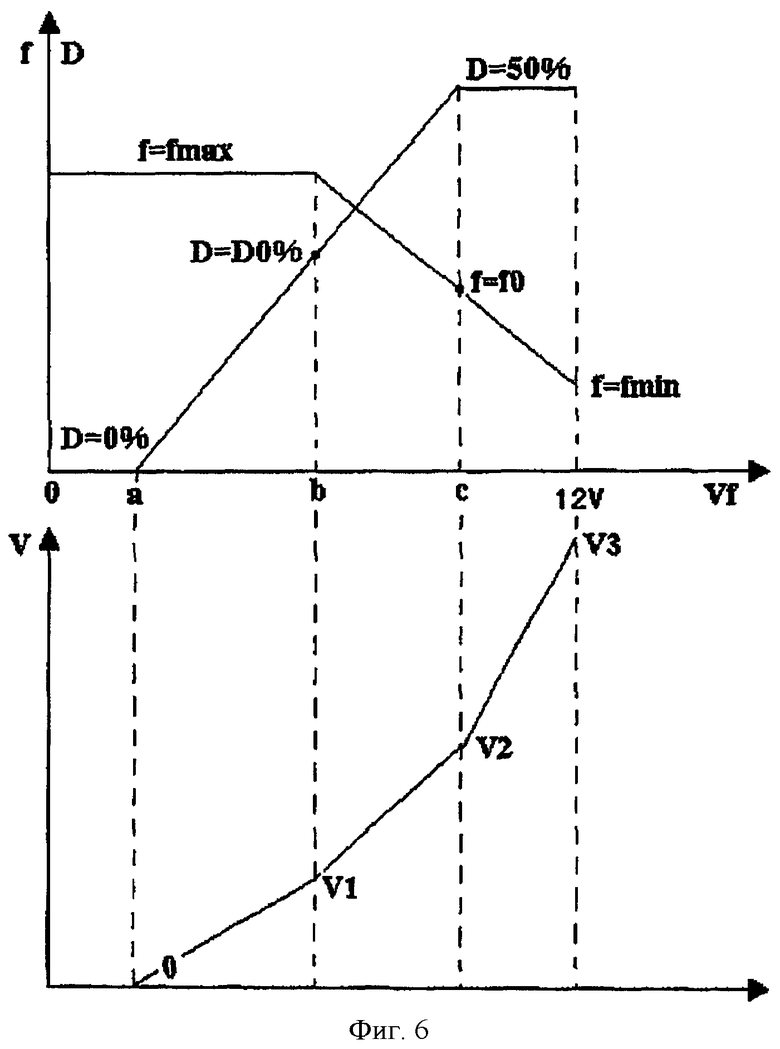
Фиг.6 показывает взаимосвязь кривых сигнала обратной связи преобразователя постоянного тока фигуры 4 в зависимости от частоты и коэффициента заполнения.
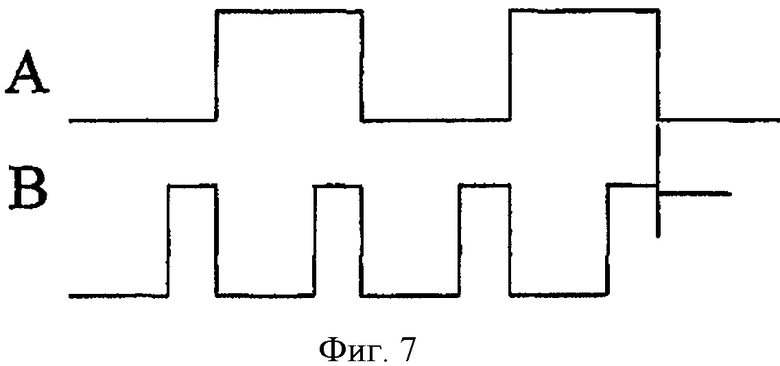
Фиг.7 - график формы волны управляющего импульса.
Фиг.8 - другая функциональная блок-схема преобразователя постоянного тока по настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Предлагается способ управления резонансным преобразователем постоянного тока, в котором выходное напряжение регулируется путем изменения частоты переключения входного переключающего устройства в резонансном контуре, при этом скорость переключения переключающего устройства регулируется в зависимости от сигнала обратной связи от цепи источника нагрузки с целью расширения диапазона выходного напряжения резонансного контура.
В качестве примера возьмем половину последовательной полумостового резонансного контура фиг.1, и кривые, А1-А3 на фиг.3, которые показывают характеристики выходного напряжения V0 как функцию частоты f схемы, когда она управляется только в режиме ЧИМ при различных условиях нагрузки, при которой коэффициент заполнения импульса составляет 50%. Можно видеть, что в процессе снижения нагрузки, кривая V0 стремиться превратиться в плоскость, и трудно обеспечить стабилизацию, увеличивая рабочую частоту. Кривые В1-В2>В3 на фиг.3 показывают характеристику выходного напряжения V0 как функцию отношения D и частоты f, когда частота переключения кривых А1~А3 выше частоты fa, после того как схема в режиме управления ЧИМ переключена в режим ШИМ и, таким образом, находится в комбинированном режиме управления, в котором коэффициент заполнения D снижается от 50% до 0. Как можно видеть по кривым B1, B2 и В3, выходное напряжение начинает падать, когда частота управления достигает величины fa, и быстро уменьшается до 0 при частоте управления fb, после использования управления в режиме ЧИМ + ШИМ. По сравнению с режимом управления ЧИМ выходные характеристики значительно улучшаются.
Входное переключающее устройство резонансного контура управляется управляющим импульсом через цепь управления и, таким образом, переключение из режима ЧИМ в режим ЧИМ + ШИМ осуществляется путем изменения управляющего импульса. Переключение режимов управления зависит непосредственно от условий нагрузки, благодаря чему управляющий импульс может быть получен следующим образом:
(1) получение сигнала обратной связи из цепи источника нагрузки, при этом сигнал обратной связи компенсируется импульсным напряжением отрицательной обратной связи из цепи источника нагрузки;
(2) определение рабочих условий нагрузки, на основании сигнала обратной связи, получая сигнал обратной связи и сравнивая его с опорным сигналом, т.е. сигнал обратной связи обрабатывается, чтобы получить частотно-импульсный управляющий сигнал и широтно-импульсный модулирующий сигнал. Обработка (или вычисление) широтно-импульсного модулирующего сигнала включает следующие операции: сравнение сигнала обратной связи с предопределенным опорным сигналом 1 после масштабирования (сложения или вычитания) сигнала обратной связи; и, если эта величина меньше величины опорного сигнала 1 (или выше этой величины в зависимости от логических характеристик схемы, предполагается, что сигнал обратной связи пропорционален напряжению нагрузки, т.е. чем меньше сигнал обратной связи, тем меньше нагрузка), используя обработанный сигнал обратной связи непосредственно как широтно-импульсный модулирующий сигнал; в другом случае, используя постоянной опорный сигнала 1 как широтно-импульсный модулирующий сигнал. При этом широтно-импульсный модулирующий сигнал является постоянным, что соответствует простому режиму управления ЧИМ. Опорный сигнал 1 определяется в соответствии с электрическими характеристиками нагрузки, так что результаты сравнения и стадии определения, которые были выполнены на основе опорного сигнала 1, правильно определяют, работает ли источник нагрузки в условиях малой нагрузки. Действие частотно-импульсного управляющего сигнала может протекать двумя путями. Один путь состоит в применении к сигналу обратной связи таких операций как вычисление, сложение или вычитание и т.д., и последующий вывод непосредственно обработанного сигнала в виде частотно-импульсного управляющего сигнала, который всегда изменяется в зависимости от сигнала обратной связи, и, таким образом, резонансный контур всегда работает в режиме управления ЧИМ. Другой путь аналогичен действиям с широтно-импульсным модулирующим сигналом с последующим сравнением результата таких действий, как вычисление, вычитание или сложение с предопределенным опорным сигналом 2, и если амплитуда выше амплитуды опорного сигнала 2 (или ниже амплитуды опорного сигнала в зависимости от логических характеристик схемы, то предполагается, что сигнал обратной связи пропорционален напряжению нагрузки, т.е. чем ниже сигнал обратной связи, тем меньше нагрузка), затем рабочий сигнал обратной связи выводится непосредственно как частотно-импульсный управляющий сигнал; в другом случае, выводится постоянной опорный сигнала 2, как частотно-импульсный управляющий сигнал. При этом частотно-импульсный управляющий сигнал является постоянным, что соответствует простому режиму управления ШИМ. Точно так же, опорный сигнал 2 должен быть определен в соответствии с электрическими характеристиками нагрузки с тем, чтобы результаты сравнения и стадия определения, которые были выполнены на основе опорного сигнала 2, правильно бы отражали, работает ли источник нагрузки в условиях нулевой нагрузки. Дополнительно, чтобы плавно перейти от управления ЧИМ к управлению ЧИМ + ШИМ и к управлению ШИМ, если источник нагрузки настроен на работу приблизительно в условиях нулевой нагрузки на основе опорного сигнала 2, на основании опорного сигнала 1 может быть определено, что источник нагрузки должен работать в условиях малой нагрузки, определяя, таким образом, что, по меньшей мере, один широтно-импульсный модулирующий сигнал и частотно-импульсный управляющий сигнал в любом случае изменяются в зависимости от сигнала обратной связи;
(3) на основе результата определения на стадии (2), если источник нагрузки не работает в условиях малой нагрузки, широтно-импульсный модулирующий сигнал стабилизируется опорным сигналом 1, и частотно-импульсный управляющий сигнал изменяется в зависимости от сигнала обратной связи, таким образом, что под управлением этих двух сигналов коэффициент заполнения сформированного управляющего импульса является постоянной величиной, и частота сформированного управляющего импульса изменяется в зависимости от сигнала обратной связи, и при этом резонансный контур работает в режиме управления ЧИМ; если источник нагрузки работает в условиях малой нагрузки, оба, широтно-импульсный модулирующий сигнал и частотно-импульсный управляющий сигнал, изменяются в зависимости от сигнала обратной связи, благодаря чему при управлении этими двумя сигналами, как частота, так и коэффициент заполнения сформированного управляющего импульса, изменяются в зависимости от сигнала обратной связи и регулируются обычным образом, тогда как резонансный контур работает в режиме управления ЧИМ + ШИМ; если источник нагрузки работает в условиях приблизительно нулевой нагрузки, широтно-импульсный модулирующий сигнал изменяется в зависимости от сигнала обратной связи, и частотно-импульсный управляющий сигнал стабилизируется опорным сигналом 2, и, таким образом, при управлении этими двумя сигналами частота сформированного управляющего импульса является постоянной величиной, и коэффициент заполнения сформированного управляющего импульса изменяется в зависимости от сигнала обратной связи, тогда как резонансный контур работает в режиме управления ШИМ.
Резонансный преобразователь постоянного тока, в котором используется указанный способ управления, будет далее описан со ссылками на фиг.4 и 5. Резонансный преобразователь постоянного тока содержит цепь управления и резонансный контур. Входное переключающее устройство резонансного контура регулируется цепью управления, формирующей входной управляющий импульс, причем резонансный контур подает преобразованное напряжение в цепь источника нагрузки под управлением цепи управления; и
регулятор компенсации отрицательной обратной связи, сформированный на базе ПИ-регулятора, который осуществляет компенсацию отрицательной обратной связи по напряжению обратной связи, отобранной из цепи источника нагрузки, и заданного напряжения, чтобы получить сигнал обратной связи. Резонансный преобразователь постоянного тока дополнительно содержит дискриминатор, который включает операционную цепь 1 и операционную цепь 2, в котором операционную цепь 1 выдает опорный сигнал 1 и опорный сигнал 2, при этом сигнал обратной связи действует вместе с опорной схемой 1, и после его сравнения с опорным сигналом 1 выдается как широтно-импульсный модулирующий сигнал; сигнал обратной связи действует вместе с опорной схемой 2, и после его сравнения с опорным сигналом 2 выдается как частотно-импульсный управляющий сигнал; при этом и опорный сигнал 1 и опорный сигнал 2 определяются электрической характеристикой нагрузки, и принципы их настройки соответствуют вышеописанному способу управления, и, таким образом, не будут далее описываться подробно. Когда источник нагрузки работает в режиме почти нулевой нагрузки, дискриминатор выдает постоянный частотно-импульсный управляющий сигнал (т.е. опорный сигнал 2), и широтно-импульсный модулирующий сигнал, который изменяется в зависимости от изменения сигнала обратной связи. Когда источник нагрузки работает в режиме малой нагрузки, дискриминатор выдает частотно-импульсный управляющий сигнал, который изменяется в зависимости от изменения сигнала обратной связи, и постоянный широтно-импульсный модулирующий сигнал (т.е. опорный сигнал 1). Резонансный преобразователь постоянного тока дополнительно содержит генератор управляющих импульсов, который содержит частотно-импульсную цепь управления и широтно-импульсную цепь модуляции. Частотно-импульсная цепь управления включает генератор, управляемый напряжением, и генератор треугольных импульсов, соединенные последовательно. Цепь широтно-импульсной модуляции представляет собой цепь формирования широтно-импульсных модулирующих импульсов. Частотно-импульсный управляющий сигнал вводится в управляемый напряжением генератор, чтобы регулировать его частоту. Генератор, управляемый напряжением преобразует сигнал напряжения частотно-импульсного управляющего сигнала в прямоугольный импульсный сигнал переменной выходной частоты. Генератор треугольных импульсов получает прямоугольный импульсный сигнал переменной частоты и формирует треугольный сигнал переменной частоты и подает его на синхронизированный вывод формирователя ШИМ. Формирователь ШИМ выполняет широтно-импульсную модуляцию введенного треугольного сигнала переменной частоты в соответствии с широтно-импульсным модулирующим сигналом Vcomp, полученным с выхода компенсатора, и затем выдает управляющий импульс. Когда Vcomp является постоянной величиной опорного сигнала 1, коэффициент заполнения управляющего импульса не изменяется, и изменяется только частота, т.е. мы входим в режим управления ЧИМ. Когда изменяются и Vcomp частотно-импульсный сигнал управления, коэффициент заполнения управляющего импульса и частота изменяются одновременно, т.е. мы входим в режим управления ЧИМ + ШИМ. Когда частотно-импульсный управляющий сигнал является постоянной величиной выходного опорного сигнала 2, частота управляющего импульса, не изменяется, и изменяется только коэффициент заполнения, т.е. мы входим в режим управления ШИМ.
Как правило, опорный сигнал 1 имеет пиковое значение, которое является половиной пикового значения волны в виде последовательности треугольных импульсов. Таким образом, в режиме управления ЧИМ коэффициент заполнения сформированного управляющего импульса составляет 50%. Конечно, в зависимости от конкретных потребностей, режим управления ШИМ может быть снят, и, таким образом, выходная частота управляющего импульса всегда зависит от сигнала обратной связи, что означает, что опорный сигнал 2 установлен равным 0. Модули, которые реализуют функцию цепи регулирования частоты импульса и цепь широтно-импульсной модуляции обычно объединяются в одной микросхеме. Могут быть различные соотношения схем в соответствии с внутренними функциональными структурами микросхемы, например, цепь широтно-импульсной модуляции может сравнивать и синтезировать широтно-импульсный модулирующий сигнал переменной частоты Vcom в последовательность треугольных импульсов переменной частоты в виде управляющего импульса. В целом, частотно-импульсная цепь управления и цепь широтно-импульсной модуляции всегда работают последовательно, т.е. частотно-импульсная цепь управления формирует импульсный сигнал и регулирует его частоту, а цепь широтно-импульсной модуляции дополнительно определяет коэффициент заполнения импульсного сигнала.
На фиг.6 показана функциональная взаимосвязь между сигналом обратной связи VT, полученным от регулятора компенсации отрицательной обратной связи резонансного преобразователя постоянного тока и рабочей частотой f, и между Vf и выходным напряжением V резонансного контура, в которой горизонтальная ось представляет собой сигнал обратной связи Vf, полученный от регулятора компенсации отрицательной обратной связи при условии, что максимальное выходное напряжение регулятора компенсации отрицательной обратной связи составляет 12 V. Рабочее состояние указанного резонансного преобразователя постоянного тока описывается следующим образом:
1. Когда сигнал обратной связи изменяется от а до b, ведущая частота не изменяется, т.е. f=fmax, и коэффициент заполнения изменяется от 0% до D0%, при этом выход V резонансного контура изменяется от 0 до V1, и рабочий режим представляет собой режим управления ШИМ.
2. Когда сигнал обратной связи изменяется от b до с, ведущая частота изменяется вместе с изменением коэффициента заполнения. Коэффициент заполнения изменяется от D0% до 50% полной ширины импульса (не включая мертвую зону), вызывая непрерывное увеличение выходного напряжения. В то же время, задающая частота уменьшается от fmax до ТО, и это изменение также вызывают увеличение выходного напряжения. Когда напряжение замкнутого контура приближается к b, коэффициент заполнения достигает максимальной величины 50%, и выходное напряжение увеличивается до V2, при этом рабочий режим представляет собой режим управления ЧИМ + ШИМ.
3. Когда сигнал обратной связи изменяется от b до 12 V, коэффициент заполнения не изменяется, задающая частота уменьшается от ТО до fmin, и выходное напряжение непрерывно повышается. Когда f=fmin, выходное напряжение достигает максимального значения V3, и рабочий режим представляет собой режим управления ЧИМ.
Из фиг.6 можно видеть, что когда сигнал обратной связи увеличивается, выходное напряжение повышается и, таким образом, осуществляется регулирование с обратной связью. На фиг.6 позиция с определяет опорный сигнал 1 операционной цепи 1 и с также определяет опорный сигнал 2 операционной цепи 2. Когда система управления не включает только режим управления ШИМ, b=0.
На фиг.7 показана форма волны управляющего импульса при различных способах управления. Волна А представляет вид управляющего импульса с 50% коэффициентом заполнения при управлении ЧИМ, и волна В представляет вид импульса при управлении ЧИМ + ШИМ. Коэффициент заполнения и частота управляющего импульса изменяются в зависимости от выходного напряжения до тех пор, пока коэффициент заполнения не становится нулевым.
В вышеописанном резонансном преобразователе постоянного тока используется частотно-импульсная цепь управления и цепь широтно-импульсной модуляции, которые последовательно осуществляют альтернативное управление ЧИМ и управление ЧИМ + ШИМ. Это же может быть осуществлено при использовании другой альтернативной схемы. Как показано на фиг.8, частотно-импульсная схема регулирования частоты, и импульсное регулирование частоты плюс широтно-импульсная цепь модуляции основаны на двух цепях формирования управляющего сигнала, которые независимы друг от друга. Дискриминатор альтернативно управляет одной из них в зависимости от нагрузки, выдавая соответствующий управляющий импульс в соответствии с потребностями управления по настоящему изобретению, т.е. если дискриминатор определяет, что источник нагрузки работает в режиме малой нагрузки или в режиме нулевой нагрузки, сигнал модуляции управляющего импульса выдается в цепь частотно-импульсного регулирования частоты плюс широтно-импульсная цепь модуляции, чтобы управлять управляющим импульсом, которым регулируются выходная частота и коэффициент заполнения в зависимости от изменения сигнала обратной связи. В другом случае, частотно-импульсная цепь управления получает сигнал управления модулирующим импульсом на выходе, коэффициент заполнения которого является постоянной величиной, а частота изменяется в зависимости от изменения сигнала обратной связи. Это альтернативное воплощение может также достичь цели настоящего изобретения, но является более сложным. В заявленном способе величины опорного сигнала определяют время переключения режима управления. Что касается выбора точек переключения, то большинство резонансных цепей основано на определении режима нагрузки, в частности области малой нагрузки, нулевой нагрузки или почти нулевой нагрузки, поскольку управляющая способность ЧИМ в этих областях слабее. В частности, для некоторых цепей, таких как цепи низкого напряжения и большого тока, вышеупомянутый способ не только используется при "малой нагрузке" в обычном смысле (поскольку в этой схеме, "малая нагрузка" в нормального смысле не может полностью покрыть участки, на которых выходная характеристика изменяется). Вместе с тем точки переключения могут быть определены по общей оценке выходной характеристики цепи, т.е. по величине опорного сигнала с тем, чтобы режим управления ШИМ мог бы использоваться в областях, где управляющая способность ЧИМ становится более слабой, чтобы улучшить или усилить функцию управления ЧИМ. Соответственно, понятие "малой нагрузки" в настоящем изобретении должно быть понято как режим нагрузки, в котором управляющая способность ЧИМ становится более слабой и ограниченной не только в режиме нагрузки "малого тока и напряжения". Режим управления по настоящему изобретению принят для схемы, в которой используется принцип резонанса, включая резонанс напряжений, параллельный резонанс, последовательно-параллельный резонанс и т.д. Топология схемы может быть построена в виде полного моста и/или полумоста и так далее. Когда рабочая частота резонансного контура является низкой, преобразователь работает в частотно-импульсном режиме управления, и когда рабочая частота выше, преобразователь работает с частотным управлением плюс широтно-импульсный режим модуляции, избегая, таким образом, высокой частоты переключения в условиях нулевой или высокой нагрузки и стабилизируя выходное напряжение в условиях малой нагрузки. Настоящее изобретение может быть осуществлено по простой схеме. Схемы могут плавно переключаться между режимами при различных способах управления, что гарантирует надежность схемы.
Частотно-импульсная цепь управления плюс широтно-импульсная модуляция, частотно-импульсное управление и цепи дискриминатора в настоящем изобретении могут быть осуществлены аппаратными и/или программными средствами, программируемыми по способу управления настоящего изобретения. Это ясно специалистам в данной области техники после чтения данного описания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ С МОДУЛЯЦИЕЙ ДЛЯ РЕЗОНАНСНОГО КОНТУРА | 2007 |
|
RU2436210C2 |
| Способ частотно-импульсного регулирования резонансного преобразователя с фазовой автоподстройкой ширины импульса | 2017 |
|
RU2662228C1 |
| Способ широтно-импульсного регулирования резонансного преобразователя с фазовой автоподстройкой частоты коммутации | 2017 |
|
RU2661495C1 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2003 |
|
RU2251786C2 |
| Стабилизированный преобразователь постоянного напряжения с защитой | 1988 |
|
SU1577017A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2300774C1 |
| СТАБИЛИЗИРОВАННЫЙ КВАЗИРЕЗОНАНСНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2009 |
|
RU2385526C1 |
| Способ управления преобразователем с ШИМ | 1988 |
|
SU1737674A1 |
| СТАБИЛИЗИРОВАННЫЙ КВАЗИРЕЗОНАНСНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2417510C1 |
| Способ управления матричным преобразователем частоты | 2016 |
|
RU2641653C1 |

Использование: в области электротехники. Технический результат заключается в снижении рабочей частоты и уменьшении потерь в схеме при работе с малой нагрузкой или при отсутствии нагрузки. Выходное напряжение резонансного преобразователя постоянного тока регулируют, изменяя частоту включений входного переключающего устройства резонансного контура преобразователя, на основе сигнала обратной связи цепи нагрузки. Используется режим управления с частотной модуляцией, когда рабочая частота сети электропитания является низкой, и режим управления с помощью частотной модуляции плюс широтно-импульсной модуляции, когда рабочая частота сети электропитания является слишком высокой. Также заявлен резонансный преобразователь постоянного тока, предназначенный для осуществления заявленного способа управления. 2 н. и 8 з.п. ф-лы, 8 ил.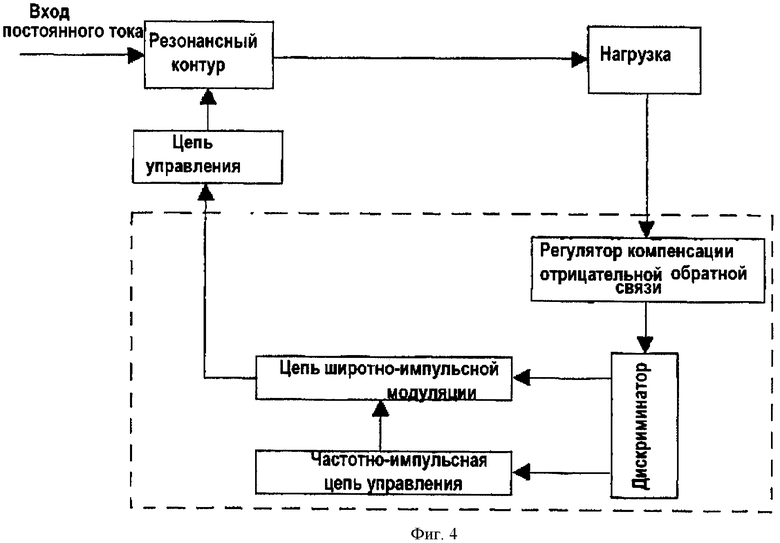
1. Способ управления резонансным преобразователем постоянного тока, в котором выходное напряжение регулируется, изменяя частоту включений входного переключающего устройства резонансного контура преобразователя, отличающийся дополнительным регулированием частоты включений переключающего устройства на основе сигнала обратной связи из цепи нагрузки, чтобы расширить диапазон выходного напряжения резонансного контура, причем входные переключающие устройства резонансного контура управляются управляющим импульсом через цепь управления, при этом формирование управляющего импульса осуществляется в процессе выполнения следующих стадий: (1) получение сигнала обратной связи из цепи нагрузки; (2) определение, работает ли источник нагрузки в режиме малой нагрузки или нулевой нагрузки на основе сигнала обратной связи; и (3) использование импульсного сигнала, в котором частота и коэффициент заполнения регулируются по изменению сигнала обратной связи в виде управляющего импульса цепи управления, если источник нагрузки работает в режиме малой нагрузки или нулевой нагрузки с тем, чтобы резонансный контур работал в комбинированном режиме управления с широтно-импульсной модуляцией и частотно-импульсной модуляцией; в другом случае используется импульсный сигнал, коэффициент заполнения которого является постоянной величиной, а частота изменяется в зависимости от изменения сигнала обратной связи как управляющего импульса цепи управления, чтобы получить резонансный контур, работающий в режиме управления с частотно-импульсной модуляцией.
2. Способ управления резонансным преобразователем постоянного тока по п.1, отличающийся тем, что стадия (1) содержит (1а) отбор напряжения обратной связи из цепи нагрузки и (1b) подачу напряжения обратной связи в устройство компенсации отрицательной обратной связи, чтобы получить сигнал обратной связи.
3. Способ управления резонансным преобразователем постоянного тока по п.2, отличающийся тем, что на стадии (2) частотно-импульсный управляющий сигнал и широтно-импульсный модулирующий сигнал формируются в результате процесса обработки сигнала обратной связи; при этом процесс обработки широтно-импульсного модулирующего сигнала содержит сравнение с опорным сигналом 1, чтобы определить, работает ли источник нагрузки в режиме малой нагрузки или нулевой нагрузки, и опорный сигнал 1 определяется в соответствии с электрической характеристикой нагрузки; на стадии (3) управляющий импульс регулируется как частотно-импульсным управляющим сигналом, так и широтно-импульсным модулирующим сигналом, причем этот сигнал формируется, когда источник нагрузки работает в режиме малой нагрузки или нулевой нагрузки; в другом случае формируется только управляющий импульс, коэффициент заполнения которого является постоянной величиной и регулирование осуществляется частотно-импульсным управляющим сигналом.
4. Способ управления резонансным преобразователем постоянного тока по п.3, отличающийся тем, что на стадии (2) процесс обработки частотно-импульсного управляющего сигнала включает сравнение с опорным сигналом 2, чтобы определить, работает ли источник нагрузки в режиме, приблизительно соответствующем нулевой нагрузке, причем опорный сигнал 2 определяется по электрической характеристике нагрузки, и опорный сигнал 2 отвечает заданным условиям, если определено, что источник нагрузки работает в режиме, приблизительно соответствующем нулевой нагрузке на основе опорного сигнала 2, и на основе опорного сигнала 1 должно быть определено, что источник нагрузки работает в режиме малой нагрузки или нулевой нагрузки; на стадии (3), когда источник нагрузки работает в режиме, приблизительно соответствующем нулевой нагрузке, формируется только управляющий импульс, который имеет постоянную частоту и регулируется широтно-импульсным модулирующим сигналом.
5. Резонансный преобразователь постоянного тока, содержащий цепь управления и резонансный контур, при этом управляющая цепь управляет входным переключающим устройством или устройствами резонансного контура на основе входного управляющего импульса; резонансный контур обеспечивает подачу преобразованного напряжения в цепь нагрузки под управлением цепи управления, отличающийся тем, что дополнительно содержит регулятор компенсации отрицательной обратной связи, используемый для выполнения операции компенсации отрицательной обратной связи напряжения обратной связи, отбираемого из цепи нагрузки, чтобы получить сигнал обратной связи; дискриминатор для определения режима нагрузки цепи нагрузки путем ввода сигнала обратной связи и вывода сигнала модуляции управляющего импульса; и генератор управляющих импульсов для формирования и вывода управляющего импульса на основе введенного сигнала модуляции управляющего импульса, в котором, если источник нагрузки работает в режиме малой нагрузки или нулевой нагрузки, формируется управляющий импульс, частота и коэффициент заполнения которого регулируются в зависимости от изменения сигнала обратной связи; в другом случае формируется управляющий импульс, коэффициент заполнения которого является постоянной величиной, а частота изменяется в зависимости от изменения сигнала обратной связи, частотно-импульсную цепь управления и частотно-импульсную цепь управления плюс широтно-импульсную цепь модуляции; если дискриминатор определит, что источник нагрузки работает в режиме малой нагрузки или нулевой нагрузки, частотно-импульсная цепь управления плюс широтно-импульсную цепь модуляции регулируются сигналом модуляции управляющего импульса для получения выходного управляющего импульса, частота и коэффициент заполнения которого изменяются в зависимости от изменения сигнала обратной связи; в другом случае частотно-импульсная цепь управления получает сигнал модуляции управляющего импульса, коэффициент заполнения которого является постоянной величиной, а частота изменяется в зависимости от изменения сигнала обратной связи.
6. Резонансный преобразователь постоянного тока по п.5, отличающийся тем, что дискриминатор содержит операционную цепь (1) и операционную цепь (2), в которой операционная цепь (1) получает опорный сигнал 1, при этом сигнал модуляции управляющего импульса содержит частотно-импульсный управляющий сигнал и широтно-импульсный модулирующий сигнал; сигнал обратной связи выдается на выходе как широтно-импульсный модулирующий сигнал после обработки и сравнения с опорным сигналом 1 операционной цепью (1); сигнал обратной связи выдается на выходе как частотно-импульсный управляющий сигнал после обработки операционной цепью (2); в котором опорный сигнал 1 определяется в соответствии с электрической характеристикой нагрузки, и если источник нагрузки работает в режиме малой нагрузки или нулевой нагрузки, выданный широтно-импульсный модулирующий сигнал изменяется в зависимости от изменения сигнала обратной связи; в другом случае, этот сигнал является постоянной величиной; генератор управляющих импульсов содержит частотно-импульсную цепь управления и широтно-импульсную цепь модуляции, в котором частотно-импульсная цепь управления формирует импульс переменной частоты, частота которого регулируется частотно-импульсным управляющим сигналом, и широтно-импульсная цепь модуляции выдает на выходе управляющий импульс после широтно-импульсной модуляции импульса переменной частоты широтно-импульсным модулирующим сигналом.
7. Резонансный преобразователь постоянного тока по п.6, отличающийся тем, что широтно-импульсная цепь модуляции выдает на выходе управляющий импульс после сравнения и объединения широтно-импульсного модулирующего сигнала с импульсом переменной частоты.
8. Резонансный преобразователь постоянного тока по п.6, отличающийся тем, что импульс переменной частоты вводится на синхронизированный вход цепи широтно-импульсной модуляции, и цепь широтно-импульсной модуляции выполняет широтно-импульсную модуляцию введенного импульса переменной частоты широтно-импульсным модулирующим сигналом и затем выдает управляющий импульс.
9. Резонансный преобразователь постоянного тока по любому из пп.7 и 8, отличающийся тем, что операционная цепь (2) получает опорный сигнал 2; сигнал обратной связи обрабатывается и сравнивается с опорным сигналом 2 операционной цепью (2), после чего выдается частотно-импульсный управляющий сигнал; опорный сигнал 2 определяется в соответствии с электрической характеристикой нагрузки с тем, чтобы выданный частотно-импульсный управляющий сигнал был бы постоянной величиной, когда источник нагрузки работает в режиме, который приблизительно соответствует нулевой нагрузке; в другом случае, этот сигнал изменяется в зависимости от изменения сигнала обратной связи; опорный сигнал 2 удовлетворяет заданному условию, если определено, что источник нагрузки работает в режиме, приблизительно соответствующем нулевой нагрузке, на основе опорного сигнала 2, и на основе опорного сигнала 1 должно быть определено, что источник нагрузки работает в режиме малой нагрузки или нулевой нагрузки.
10. Резонансный преобразователь постоянного тока по любому из пп.7 и 8, отличающийся тем, что частотно-импульсная цепь управления имеет генератор, управляемый напряжением, и генератор треугольных импульсов, соединенные последовательно; при этом частотно-импульсный управляющий сигнал вводится в генератор, управляемый напряжением, для регулирования его частоты колебаний, а генератор треугольных импульсов формирует импульс регулируемой переменной частоты.
| Грузозахватное устройство | 1988 |
|
SU1595780A1 |
| US 2005052249 A1, 10.03.2005 | |||
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2003 |
|
RU2251786C2 |
| ИМПУЛЬСНО-МОДУЛИРОВАННЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1991 |
|
RU2012989C1 |
| Резонансный преобразователь постоянного напряжения с защитой по току | 1989 |
|
SU1709457A1 |
| US 6100675 A, 08.08.2000. | |||

