Притязание на приоритет согласно §119 раздела 35 Кодекса законов США
Настоящая патентная заявка испрашивает приоритет предварительной заявки №60/854,877 "Получение сигнала", поданной 26-го октября 2006г., переуступленной правообладателю настоящей и которая включена в данный документ посредством ссылки.
Область техники
Раскрытые системы относятся к системе для получения сигнала в системе беспроводной связи и, в частности, к способу и устройству для оценки сдвига несущей частоты и синхронизации кадра в системе беспроводной связи.
Уровень техники
Системы беспроводной связи стали широко распространенным средством, с помощью которого множество людей по всему миру обмениваются данными. Устройства беспроводной связи стали меньше по размерам и мощнее, чтобы удовлетворять потребительским потребностям, таким как лучшая портативность и удобство пользования. Пользователи нашли множество применений для устройств беспроводной связи, таких как сотовые телефоны, персональные цифровые секретари, ноутбуки и т.п., причем такие пользователи требуют надежного обслуживания и обширных зон покрытия.
Сети беспроводной связи обычно используются, чтобы передавать информацию независимо от местонахождения пользователя (внутри или вне строений) и от того, неподвижен ли пользователь, или он перемещается (например, в транспортном средстве или пешком). Как правило, сети беспроводной связи устанавливаются через мобильное устройство, осуществляющее связь с базовой станцией или точкой доступа. Точка доступа покрывает географическую область или ячейку, причем в процессе работы мобильного устройства оно может входить и выходить из этих географических ячеек. Для обеспечения непрерывной связи мобильному устройству назначаются ресурсы ячейки, в которую оно вошло, и снимаются ресурсы ячейки, из которой оно вышло.
Сеть также может быть реализована посредством одноранговой связи, без применения точек доступа. В дополнительных вариантах осуществления сеть может включать в себя как точки доступа (инфраструктурный режим), так и одноранговую связь. Сети этого типа называют ad-hoc-сетями. Ad-hoc-сети могут иметь возможность автоматической реконфигурации, когда мобильное устройство (или точка доступа) принимает передачу от еще одного мобильного устройства, и это другое мобильное устройство добавляется в сеть. Когда мобильные устройства покидают эту область, они динамически удаляются из сети. Таким образом, топология сети может постоянно меняться. В многосегментной топологии передача осуществляется через некоторое количество сегментов или отрезков, а не напрямую от отправителя к получателю.
Сверхширокополосная технология, такая как общая радиоплатформа WiMedia UWB, имеет способность оптимизировать возможность соединения между мультимедийными устройствами в Беспроводной Персональной Сети (WPAN). Целями этого стандарта беспроводной связи является удовлетворение таких требований, как обеспечение низкой стоимости, низкое энергопотребление, малые размеры, большая ширина полосы и качество обслуживания (QoS).
Общая радиоплатформа WiMedia UWB представляет способ распределенного доступа к среде, который обеспечивает решение для функционирования разных беспроводных приложений в одной сети. Общая радиоплатформа WiMedia UWB объединяет спецификации уровня Управления Доступом к Среде (MAC) и Физического (PHY) уровня на основе Многополосного Мультиплексирования с Ортогональным Частотным Разделением (MB-OFDM). Спецификации MAC и PHY стандарта WiMedia специально разработаны так, чтобы адаптироваться под различные требования, установленные глобальными регулятивными органами. Производители, которым требуется обеспечить выполнение требований правил различных стран, могут, таким образом, осуществлять это легко и без больших затрат. Некоторые другие дружественные по отношению к приложениям функции, которые пытается реализовать WiMedia UWB, включают в себя низкий уровень сложности узла, длительный срок службы батарей питания, поддержку множества режимов управления мощностью и высокую пространственную пропускную способность.
WiMedia UWB-совместимые приемники должны справляться с помехами от существующих беспроводных служб и обеспечивать большую ширину полосы. В то же время они должны функционировать с очень низким уровнем мощности передачи. Одной из задач, которые должны быть решены приемником в рабочей среде, является обнаружение сигнала и - как его часть- оценку сдвига несущей частоты и детектирование кадров в переданном сигнале.
Соответственно, существует необходимость в решении вышеупомянутых проблем.
Сущность изобретения
Описанные в настоящем документе подходы направлены на оценку сдвига несущей частоты и синхронизацию кадра. Согласно одному подходу описан способ выполнения комбинированной оценки сдвига несущей частоты и синхронизации кадра, включающий в себя этапы, на которых выполняют частотную дискриминацию первого уровня на, по меньшей мере, одном оцененном канальном отводе, чтобы сгенерировать распознанное значение частоты; оценивают фазовую ошибку из распознанного значения частоты и определяют предопределенный шаблон синхронизации кадра из оцененной фазовой ошибки.
Согласно еще одному подходу описано устройство для выполнения комбинированной оценки сдвига несущей частоты и синхронизации кадра, включающее в себя средство для выполнения частотной дискриминации первого уровня на, по меньшей мере, одном оцененном канальном отводе, чтобы сгенерировать распознанное значение частоты; средство для оценки фазовой ошибки из распознанного значения частоты и средство для определения предопределенного шаблона синхронизации кадра из оцененной фазовой ошибки.
Согласно еще одному подходу описано устройство беспроводной связи. Устройство беспроводной связи включает в себя антенну, соединенный с антенной приемник, который имеет схему, сконфигурированную так, чтобы реализовать способ выполнения комбинированной оценки сдвига несущей частоты и синхронизации кадра, включающий в себя этапы, на которых выполняют частотную дискриминацию первого уровня на, по меньшей мере, одном оцененном канальном отводе, чтобы сгенерировать распознанное значение частоты; оценивают фазовую ошибку из распознанного значения частоты; и определяют предопределенный шаблон синхронизации кадра из оцененной фазовой ошибки.
Согласно еще одному подходу описан компьютерный программный продукт. Компьютерный программный продукт включает в себя машиночитаемый носитель, содержащий код для побуждения компьютера выполнять частотную дискриминацию первого уровня на, по меньшей мере, одном оцененном канальном отводе, чтобы сгенерировать распознанное значение частоты; код для побуждения компьютера выполнять оценку фазовой ошибки из распознанного значения частоты и код для побуждения компьютера определять предопределенный шаблон синхронизации из оцененной фазовой ошибки.
Краткое описание чертежей
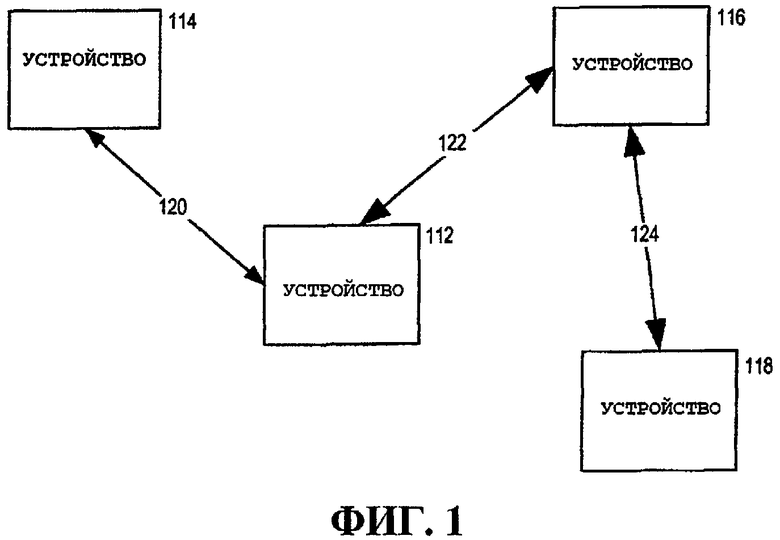
Фиг.1 - структурная схема примера беспроводной ad-hoc-сети;
Фиг.2 - структурная схема примера устройства беспроводного терминала;
Фиг.3 - структура пакета согласно стандарту WiMedia UWB;
Фиг.4 - таблица распределения сверхширокополосного спектра в разных странах;
Фиг.5 - структура преамбулы пакета с Фиг.3;
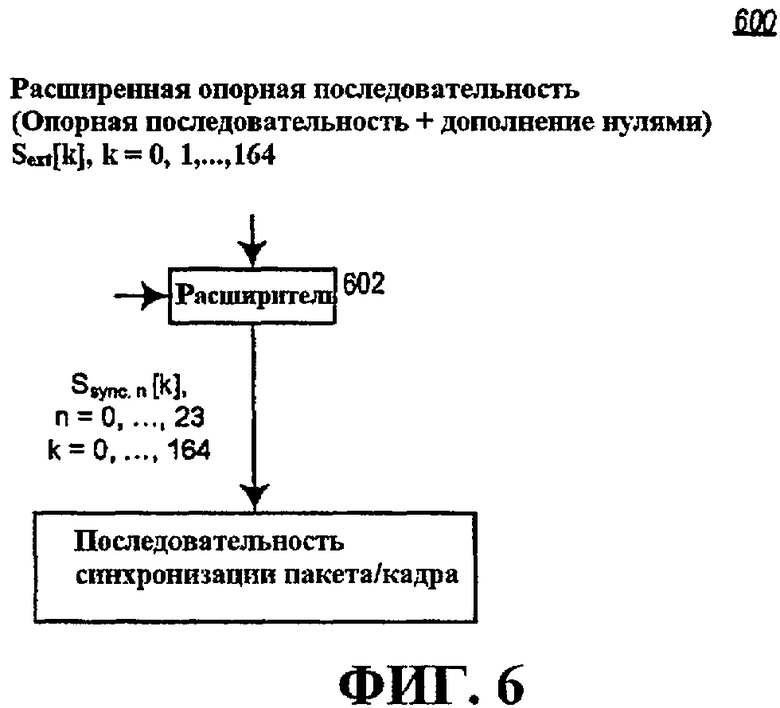
Фиг.6 - структурная схема генератора последовательности синхронизации пакета/кадра для структуры преамбулы с Фиг.5;
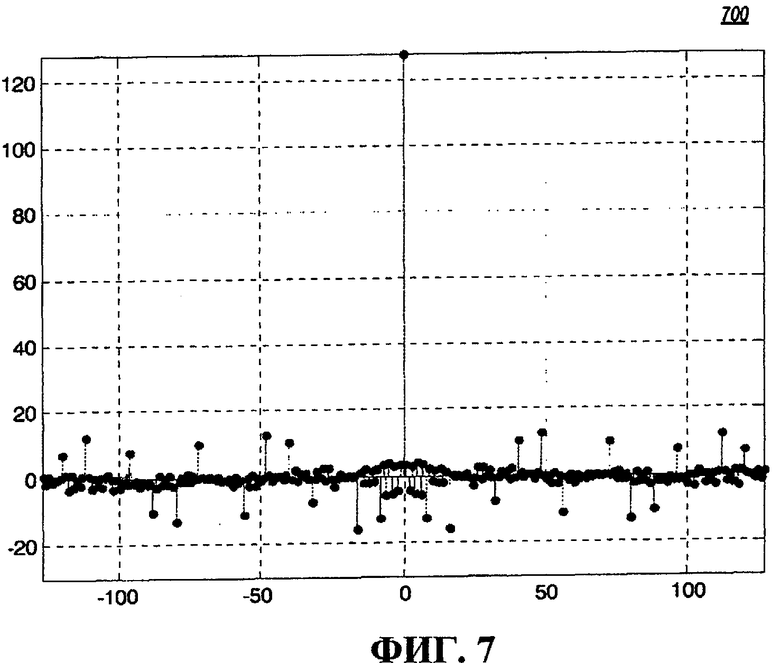
Фиг.7 - график апериодический функции автокорреляции опорной последовательности, используемой для генерации шаблона преамбулы;
Фиг.8 - структурная схема генератора иерархической опорной последовательности, используемого для генерации опорной последовательности;
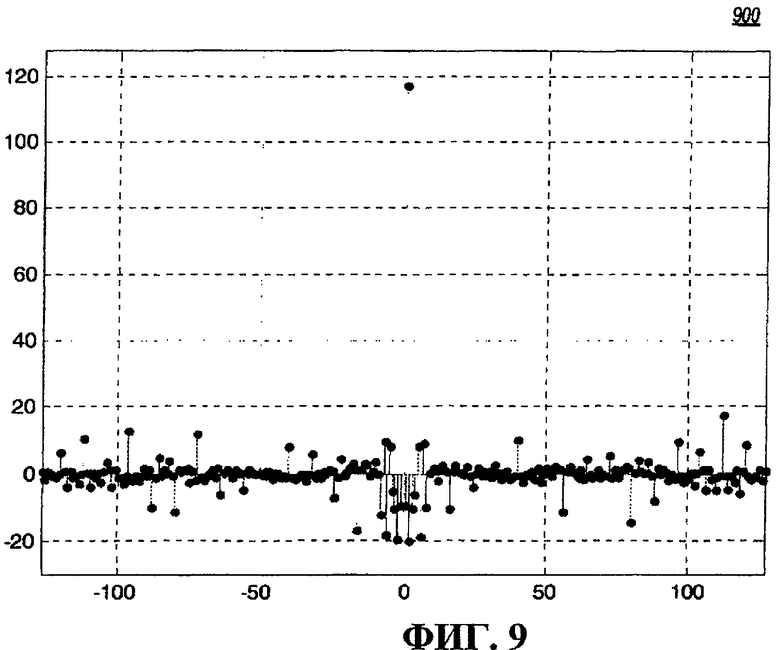
Фиг.9 - график апериодической взаимной корреляции между опорной последовательностью с Фиг.7 и соответствующей иерархической опорной последовательностью с Фиг.8;
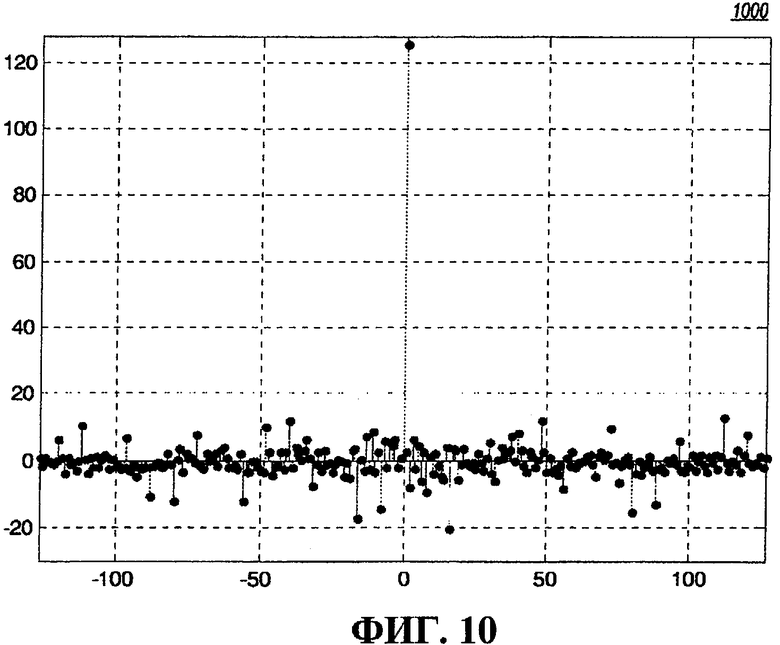
Фиг.10 - график апериодической взаимной корреляции между опорной последовательностью с Фиг.7 и округленной версией соответствующей опорной последовательности;
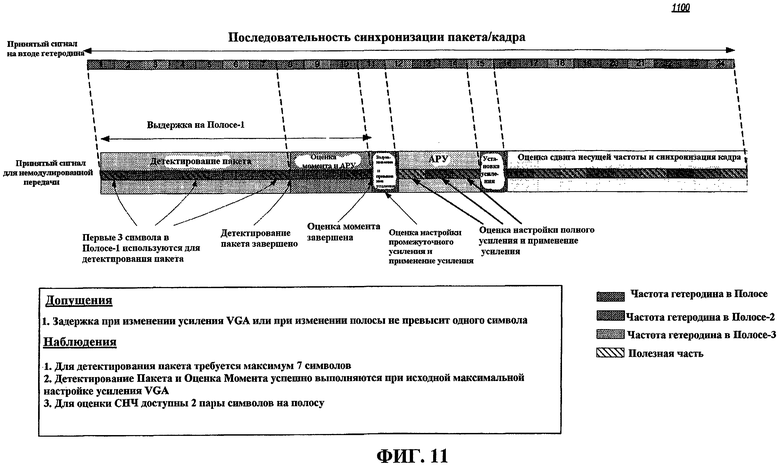
Фиг.11 - временная диаграмма, иллюстрирующая процесс получения/синхронизации для частотно-временного кода TFC-1 и TFC-2;
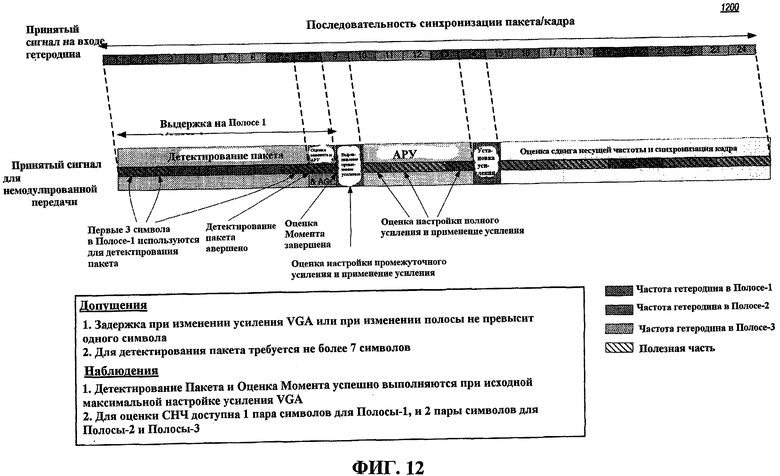
Фиг.12 - временная диаграмма, иллюстрирующая процесс получения/синхронизации для TFC-3 и TFC-4;
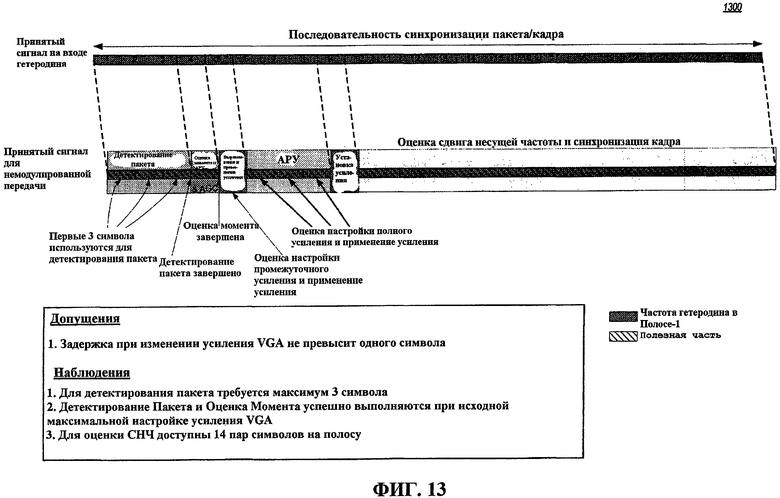
Фиг.13 - временная диаграмма, иллюстрирующая процесс получения/синхронизации для TFC-5, TFC-6 и TFC-7;
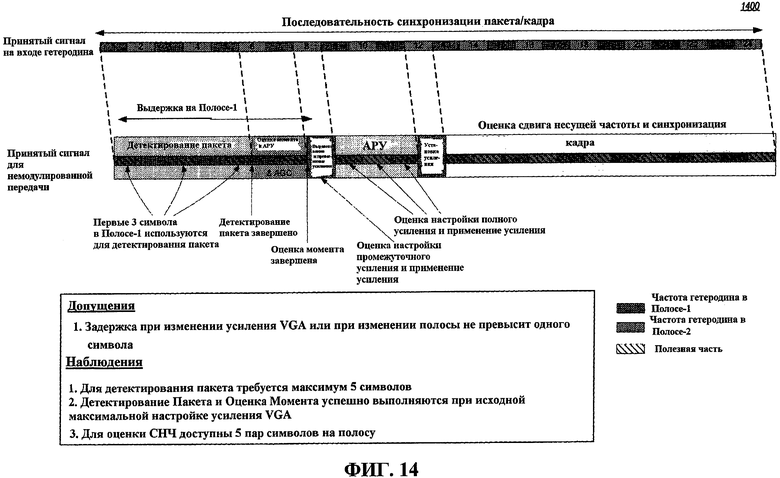
Фиг.14 - временная диаграмма, иллюстрирующая процесс получения/синхронизации для TFC-8, TFC-9 и TFC-10;
Фиг.15 - структурная схема синхронизатора, который включает в себя модуль детектирования пакета, модуль оценки момента и модуль оценки Сдвига Несущей Частоты (СНЧ) и синхронизации кадра;
Фиг.16 - структурная схема оценщика СНЧ и синхронизатора кадра, которые реализуют модуль оценки СНЧ и синхронизации кадра синхронизатора с Фиг.15;
Фиг.17 - структурная схема процессора оценки СНЧ и синхронизации кадра для TFC-1 и TFC-2;
Фиг.18 - иллюстрация процесса детектирования синхронизации кадра для TFC-1 и TFC-2;
Фиг.19 - структурная схема процессора оценки СНЧ и синхронизации кадра для TFC-3 и TFC-4;
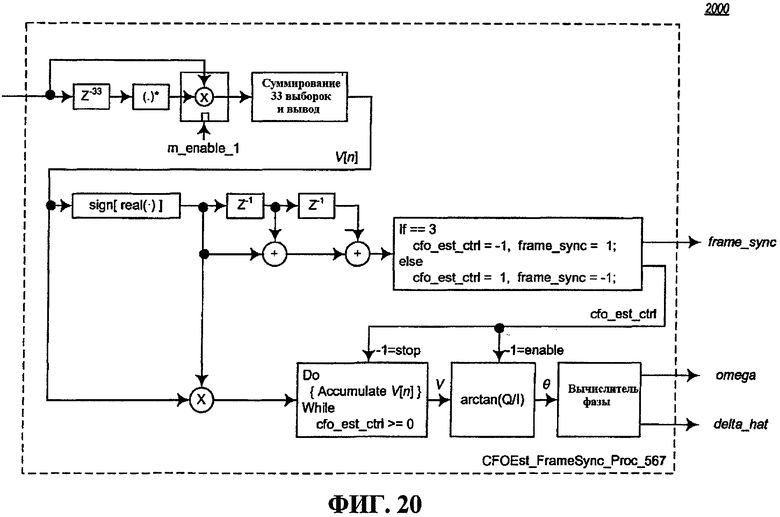
Фиг.20 - структурная схема процессора оценки СНЧ и синхронизации кадра для TFC-5, TFC-6 и TFC-7;
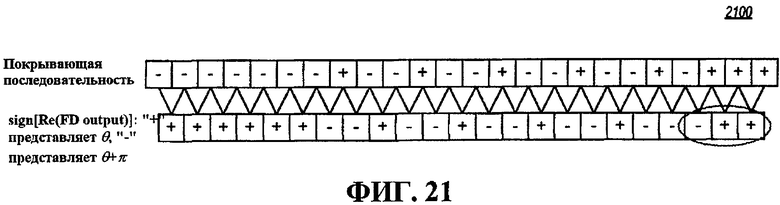
Фиг.21 - иллюстрация процесса детектирования синхронизации кадра для TFC-5, TFC-6 и TFC-7;
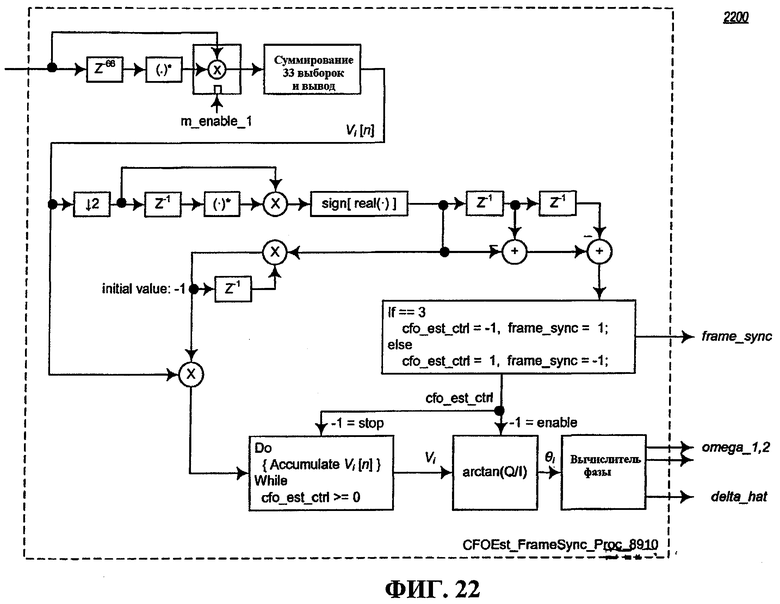
Фиг.22 - структурная схема процессора оценки СНЧ и синхронизации кадра для TFC-8, TFC-9 и TFC-10;
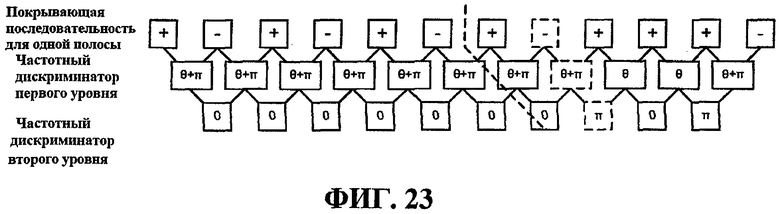
Фиг.23 - иллюстрация принципа детектирования синхронизации кадра для TFC-8, TFC-9 и TFC-10;
Фиг.24 - первый пример реализации согласованного фильтра синхронизатора по Фиг.15;
Фиг.25 - второй пример реализации согласованного фильтра синхронизатора по Фиг.15;
Фиг.26 - пример реализации L-отводного объединителя многолучевой энергии, используемого для реализации скользящего окна.
Подробное описание
Различные варианты осуществления описаны ниже со ссылкой на чертежи. В нижеизложенном описании в целях разъяснения приведены различные конкретные детали, чтобы обеспечить полное понимание одного или более аспектов. Тем не менее, следует понимать, что подобный(ые) вариант(ы) осуществления могут быть реализованы без этих конкретных деталей. В других случаях широко известные структуры и устройства показаны в форме блоков структурной схемы, чтобы облегчить описание этих вариантов осуществления.
В использованном здесь значении термины "компонент", "модуль", "система" и т.п. предназначены для описания связанного с компьютером объекта - аппаратного обеспечения, программно-аппаратного обеспечения, комбинации аппаратного и программного обеспечения или программного обеспечения. Например, компонент может представлять собой, но не ограничивается перечисленным, выполняемый процессором процесс, процессор, объект, выполняемый файл, поток выполнения, программу и/или компьютер. В качестве иллюстрации компонентом может быть как приложение, выполняемое на вычислительном устройстве, так и само вычислительное устройство. Один или более компонентов могут быть вовлечены в процесс и/или поток выполнения, и компонент может быть локализован на одном компьютере и/или распределен между двумя или более компьютерами. В добавление, эти компоненты могут выполняться с различных машиночитаемых носителей, содержащих различные структуры данных. Эти компоненты могут осуществлять связь посредством локальных и/или удаленных процессов, как, например, в случае сигнала с одним или более пакетами данных (например, данные с одного компонента, взаимодействующего с другим компонентом в локальной системе, распределенной системе и/или посредством сигнала через сеть, такую как сеть Интернет). Термин "пример" в использованном здесь значении обозначает "служащий в качестве примера, образца или иллюстрации". Ни один из описанных "примеров" осуществления не может рассматриваться как предпочтительный или эффективный относительно других вариантов осуществления.
Кроме того, различные варианты осуществления описаны в настоящем документе в связи с пользовательским устройством. Пользовательское устройство также может называться системой, абонентским устройством, мобильной станцией, мобильным устройством, удаленной станцией, точкой доступа, удаленным терминалом, терминалом доступа, терминальным устройством, пользовательским терминалом, терминалом, агентом пользователя, беспроводным терминалом, беспроводным устройством или пользовательским оборудованием. Пользовательское устройство может представлять собой сотовый телефон, бесшнуровый телефон, телефон Протокола Инициации Сессии (SIP), станцию Беспроводной Местной Линии (WLL), Персональный Цифровой Секретарь (PDA), карманное устройство с возможностью беспроводного соединения или другое устройство обработки, соединенное с беспроводным модемом. В определенных вариантах осуществления пользовательское устройство может представлять собой потребительскую электронику с присоединенным сверхширокополосным модемом, такую как принтер, камера/видеокамера, музыкальный проигрыватель, независимое магнитное устройство хранения или флэш-память, или другое аудио-видео оборудование, например, с хранилищем содержимого.
Более того, различные описанные здесь аспекты или отличительные признаки могут быть реализованы как способ, устройство или изделие, используя стандартные методы программирования и/или техники. В использованном здесь значении термин "изделие" предназначен для обозначения компьютерной программы, доступной с любого машиночитаемого устройства, носителя или среды. Например, машиночитаемые носители могут включать в себя, но не ограничиваются перечисленным, магнитные устройства хранения (например, жесткий диск, дискеты, магнитные ленты...), оптические диски (например, компакт-диски (CD), Цифровые Универсальные Диски (DVD...), смарт-карты и устройства флэш-памяти (например, карты, "флэшки", ключи...).
Различные варианты осуществления представлены в настоящем документе в терминах систем, которые могут включать в себя некоторое количество устройств, компонентов, модулей и т.п.). Следует понимать, что эти различные системы могут включать в себя дополнительные устройства, компоненты, модули и т.п., и/или могут не содержать все устройства, компоненты, модули и т.п., описанные в привязке к данным фигурам. Также может быть применена комбинация этих подходов.
Фиг.1 представляет собой иллюстрацию примера беспроводной ad-hoc-сети 100. Беспроводная сеть 100 может включать в себя любое количество мобильных устройств или узлов, которые осуществляют связь беспроводным образом. В данном случае проиллюстрировано четыре подобных мобильных устройства или узла. Мобильные устройства могут представлять собой, например, сотовые телефоны, сфартфоны, ноутбуки, карманные устройства связи, карманные вычислительные устройства, спутниковое радио, системы глобального позиционирования, Персональные Цифровые Секретари (PDA) и/или другие подходящие устройства для связи через беспроводную сеть 100. Беспроводная сеть 100 также может включать в себя одну или более базовых станций или точек доступа (не показаны).
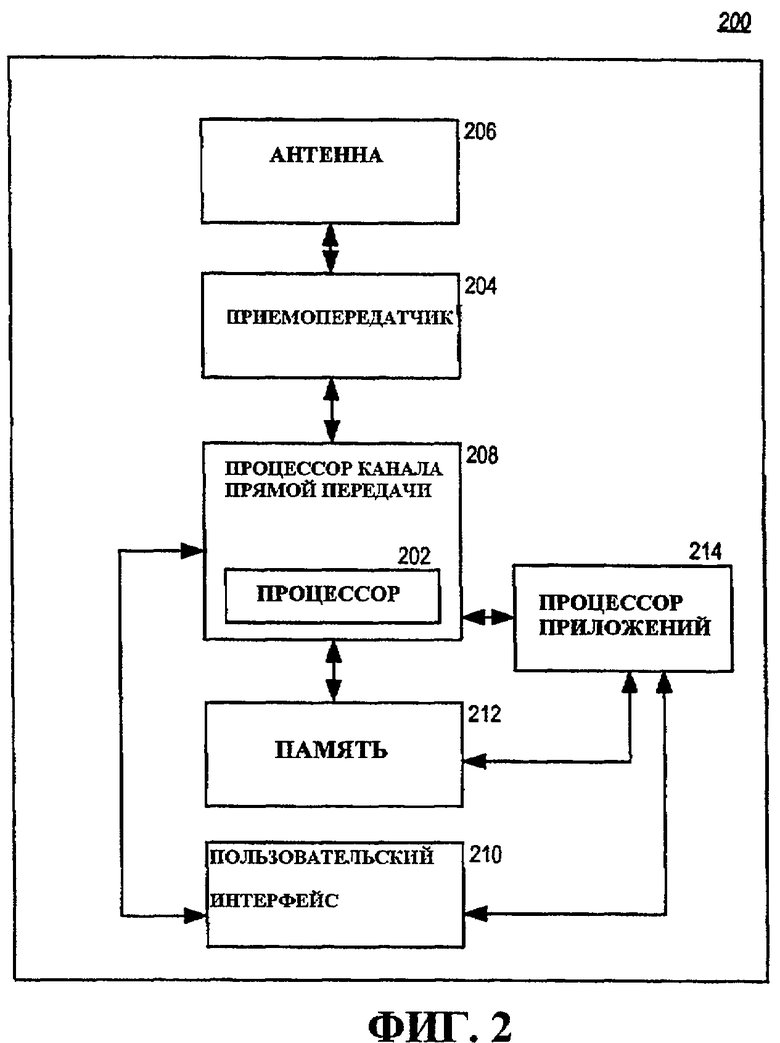
В проиллюстрированном примере терминальное устройство 112 осуществляет связь с терминальным устройством 114 через линию 120 связи и с терминальным устройством 116 через линию 112 связи. Терминальное устройство 116 также осуществляет связь с терминальным устройством 118 через линию 124 связи. Терминальные устройства 112, 114, 116 и 118 могут иметь структуру и конфигурацию согласно иллюстративной структурной схеме возможной конфигурации терминального устройства 200, показанной на Фиг.2. Специалистам в данной области техники будет очевидно, что точная конфигурация терминального устройства 200 может варьироваться в зависимости от конкретного применения и общих ограничений. Процессор 202 может реализовывать системы и способы, раскрытые в настоящем документе.
Терминальное устройство 200 может быть реализовано посредством приемопередатчика 204, соединенного с антенной 206. Процессор 208 канала прямой передачи может быть соединен с приемопередатчиком 204. Процессор 208 канала прямой передачи может быть реализован посредством программной архитектуры или архитектуры другого типа, такой как аппаратная архитектура или сочетание аппаратной и программной архитектуры. Микропроцессор может использоваться как платформа для выполнения программ, которые, среди прочего, обеспечивают функцию контроля и общего управления системой. Процессор цифровых сигналов может быть реализован с встроенным уровнем программной связи, который выполняет специальные алгоритмы, чтобы уменьшить объем требуемой обработки, выполняемой микропроцессором. Процессор цифровых сигналов используется для предоставления различных функций обработки сигналов, таких как получение пилот-сигнала, синхронизация времени, отслеживание частоты, обработка с использованием расширенного спектра, функции модуляции и демодуляции, а также прямое исправление ошибок.
Терминальное устройство 200 также может включать в себя различные пользовательские интерфейсы 210, соединенные с процессором 208 канала прямой передачи. Пользовательские интерфейсы 210 могут включать в себя клавиатуру, мышь, сенсорный экран, дисплей, звонок, вибратор, громкоговоритель, микрофон, камеру, память и/или другие устройства ввода/вывода.
Процессор 208 канала прямой передачи содержит процессор 202. В случае программной реализации процессора 208 прямого канала передачи процессор 202 может представлять собой программу, выполняемую на микропроцессоре. Тем не менее, специалистам в данной области техники будет очевидно, что процессор 202 не ограничен этим вариантом осуществления, и он может быть реализован любым известным средством, включая аппаратную конфигурацию, программную конфигурацию или их комбинацию, которая способна реализовывать различные описанные здесь функции. Процессор 202 может быть соединен с памятью 212 для хранения данных. Также может быть предоставлен прикладной процессор 214 для выполнения операционной системы и/или отдельных приложений, как показано на Фиг.2. Прикладной процессор 214 соединен с процессором 208 канала прямой передачи, памятью 212 и пользовательским интерфейсом 210.
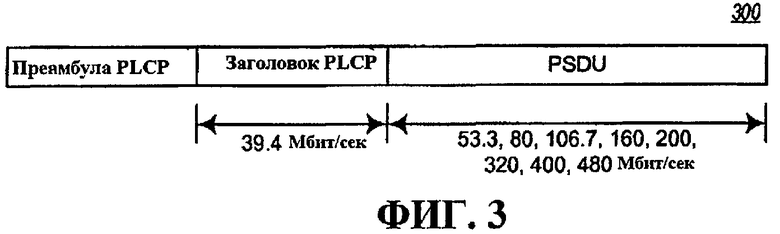
Фиг.3 представляет собой иллюстрацию структуры 300 пакета согласно стандарту Физического (PHY) уровня и уровня Управления Доступом к Среде (MAC) WiMedia UWB для высокоскоростной связи на короткие расстояния в соответствии с международным опубликованным стандартом ECMA-368 "Стандарт PHY и MAC для высокоскоростной сверхширокополосной связи" ("High Rate Ultra Wideband PHY and MAC Standard") (декабрь 2005).
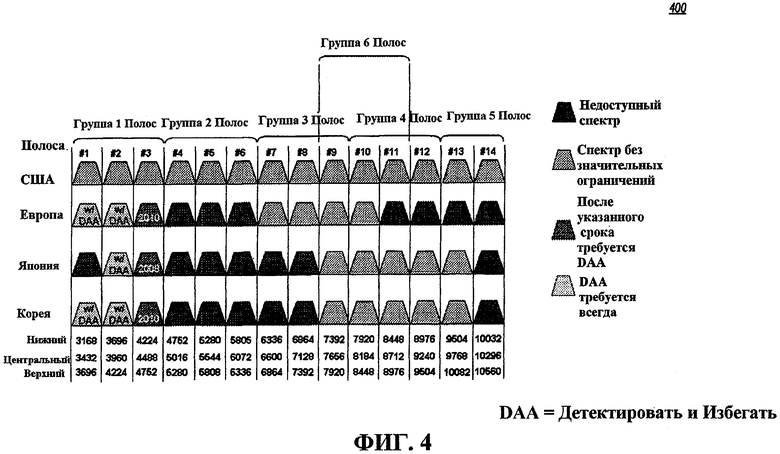
Данный стандарт ECMA специфицирует UWB PHY для персональной локальной сети (PAN), использующей нелицензируемый частотный диапазон 3100-10600 МГц, где поддерживаются следующие скорости передачи данных: 53,3 Мбит/сек, 80 Мбит/сек, 106,7 Мбит/сек, 160 Мбит/сек, 200 Мбит/сек, 320 Мбит/сек, 400 Мбит/сек и 480 Мбит/сек. Сверхширокополосный спектр разделен на 14 полос, каждая из которых имеет ширину 528 МГц. Первые 12 полос группируются в 4 группы полос, содержащие по 3 полосы, а последние две полосы группируются в пятую группу полос. Фиг.4 представляет собой иллюстрацию распределения сверхширокополосного спектра в разных странах.
Этот стандарт ECMA специфицирует схему Многополосной Модуляции с Ортогональным Частотным Разделением (MB-OFDM) для передачи информации. Для передачи информации на каждой полосе используется 110 поднесущих (100 несущих данных и 10 защитных несущих). Кроме того, 12 пилот-поднесущих обеспечивают возможность когерентного детектирования. Для варьирования скоростей передачи данных используется расширение в частотной области, расширение во временной области и кодирование с Прямой Коррекцией Ошибок (FEC). Используемая FEC представляет собой сверточный код со скоростью кодирования 1/3, 1/2, 5/8 и 3/4.
Кодированные данные затем подвергаются расширению посредством частотно-временного кода (TFC). В одном подходе, согласно стандарту ECMA, существует два типа TFC: в одном кодированная информация подвергается перемежению по трем полосам, что называется частотно-временным перемежением (TFI), а в другом кодированная информация передается по одной полосе, что называется перемежением с фиксированной частотой (FFI).
В каждой из первых четырех групп полос определены четыре частотно-временных кода с использованием TFI и три частотно-временных кода с использованием FFI. Таким образом, обеспечивается поддержка до семи каналов на полосу. Для пятой группы полос определено два частотно-временных кода с использованием FFI. Упомянутый стандарт ECMA, в целом, специфицирует 30 каналов.
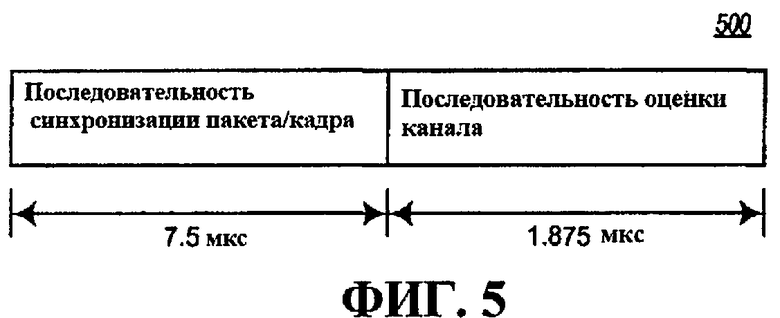
Фиг.5 представляет собой иллюстрацию структуры стандартной преамбулы пакета WiMedia UWB с Фиг.3. Всего преамбула содержит 30 OFDM-символов. Первые 24 символа преамбулы используются для детектирования пакета, оценки момента, оценки СНЧ и синхронизации кадра. Для оценки канала используются последние 6 символов преамбулы.
Фиг.6 представляет собой структурную схему генератора 600 символов преамбулы, который включает в себя расширитель 602 спектра. Здесь проиллюстрирован один подход к процессу генерации символов преамбулы, согласно которому:
1. Для заданного частотно-временного кода (TFC) (то есть, 1~10, на которые ссылаются как на TFC-1~TFC-10) выбирают опорную последовательность s base[m], m=0, 1,..., 127 временной области и бинарную покрывающую последовательность scover[n]= ±1, n=0, 1,..., 23. Бинарная покрывающая последовательность используется как разделитель для определения конца последовательности синхронизации пакета/кадра.
2. Вставляют 37 нулей в конце опорной последовательности, чтобы сформировать расширенную последовательность s ext [k], k=0, 1,...,164.
3. Расширяют покрывающую последовательность расширенной опорной последовательностью, используя расширитель 602. k-я выборка n-го символа преамбулы выражается как:
s sync,n [k]=s cover [n]×s ext [k], k=0, 1,..., 164, n=0, 1,..., 23.
Фиг.7 представляет собой иллюстрацию апериодической автокорреляции опорной последовательности s base [m], соответствующей TFC-1. Другие опорные последовательности могут иметь схожие функции автокорреляции. В одном подходе синхронизации применяется свойство отличной автокорреляции. Например, опорная последовательность генерируется из генератора 800 иерархической опорной последовательности, как показано на Фиг.8. Основной предпосылкой для использования иерархических последовательностей является разделение процесса кодирования в передатчике на иерархическую структуру, чтобы уменьшить сложность процесса декодирования в приемнике. Как показано на чертеже, первая бинарная последовательность {a[k], k=0, 2,..., 15} расширяется посредством второй бинарной последовательности {b[k], k=0, 2,..., 7} с помощью расширителя 802, чтобы сгенерировать промежуточную последовательность (которая также упоминается как бинарная иерархическая последовательность) C {c[k], k=0, 2,...,127} длиной 128 битов. Далее, после выполнения Быстрого Преобразования Фурье (FFT) промежуточной последовательности C посредством модуля 804 FFT и формирования последовательности в частотной области посредством модуля 806 формирования в частотной области, последовательности обратно преобразуются во временную область посредством модуля 808 Обратного Быстрого Преобразования Фурье (IFFT), чтобы получить опорную последовательность s base[m]. Существует уникальный набор бинарных последовательностей {a[k]} и {b[k]}, соответствующих каждой из десяти опорных последовательностей.
Фиг.9 представляет собой иллюстрацию апериодической взаимной корреляции между опорной последовательностью s base [m] для TFC-1 и соответствующей промежуточной последовательностью C {c[k]}, генерируемой посредством генератора 800 иерархической опорной последовательности. Это свойство взаимной корреляции указывает, что когда в приемнике используется согласованный фильтр, опорная последовательность может быть заменена на бинарную последовательность C в качестве коэффициентов фильтра. В одном подходе, как проиллюстрировано ниже, иерархическая структура бинарной последовательности C может быть эффективно использована для упрощения аппаратного обеспечения приемника, используемого для синхронизации. Кроме того, также может быть полезным использовать округленную версию опорной последовательности преамбулы в качестве коэффициентов согласованного фильтра. Фиг.10 представляет собой иллюстрацию апериодической взаимной корреляции между опорной последовательностью s base [m] для TFC-1 и округленной версией соответствующей опорной последовательности.
В качестве общего описания синхронизации, Фиг.11~14 иллюстрируют временную диаграмму синхронизации и получения для всех TFC. В частности, Фиг.11 иллюстрирует временную диаграмму 1100 получения для TFC-1 и TFC-2; Фиг.12 иллюстрирует временную диаграмму 1200 получения для TFC-3 и TFC-4; Фиг.13 иллюстрирует временную диаграмму 1300 получения для TFC-5, TFC-6 и TFC-7; а Фиг.14 иллюстрирует временную диаграмму 1400 получения для TFC-8, TFC-9 и TFC-10.
Согласно Фиг.11, основные задачи синхронизации можно разделить на три отдельных сегмента:
1. Детектирование пакета;
2. Оценка временных характеристик (хронирование);
3. Оценка Сдвига Несущей Частоты (СНЧ) и синхронизация кадра.
Как описано выше, стандарт ECMA обеспечивает возможность применения множества полос, и, как можно заметить из временных линий для всех TFC, приемник задерживается на Полосе-1 до выполнения детектирования пакета. Это происходит из-за того, что до детектирования пакета приемник не имеет сведений о правильном хронировании, чтобы переключиться на другие полосы (если он находится в режиме TFI). Таким образом, для детектирования пакета используются первые три символа в Полосе-1. После завершения детектирования пакета инициируется следующая фаза - оценка хронирования, и приемник сканирует следующий символ преамбулы в Полосе-1, чтобы определить оптимальное окно FFT для OFDM-символа. После завершения оценки хронирования (например, хронирование восстанавливается) для Полосы-1, приемник будет иметь достаточно информации для переключения на другие полосы согласно TFC, и будет выполнена оценка усиления Автоматической Регулировки Усиления (АРУ). После решения АРУ остальная часть символов преамбулы будет использована для оценки СНЧ и детектирования синхронизации кадра. Когда детектируется синхронизация кадра, окончательный вывод оценки СНЧ будет передан на фазовращатель, и приемник продолжит процесс оценки канала.
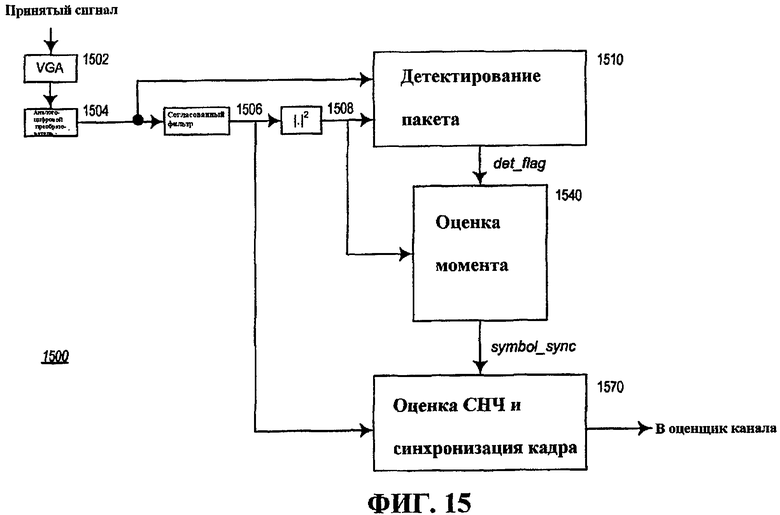
Фиг.15 представляет собой иллюстрацию синхронизатора 1500 для выполнения основных задач синхронизации. Синхронизатор 1500 включает в себя модуль 1502 Усилителя с Регулируемым Усилением (VGA), аналого-цифровой преобразователь 1504, согласованный фильтр 1506, блок 1508 возведения в квадрат, модуль 1510 детектирования пакета, модуль 1540 оценки момента и модуль 1570 оценки СНЧ и синхронизации кадра 1570.
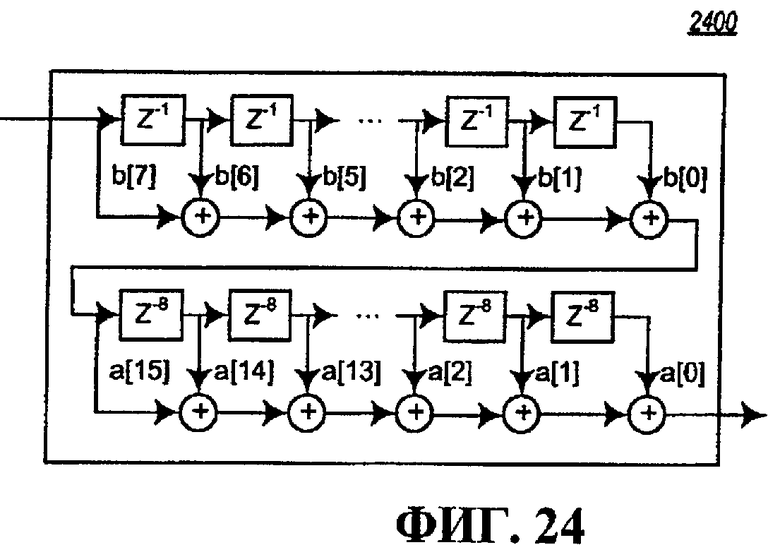
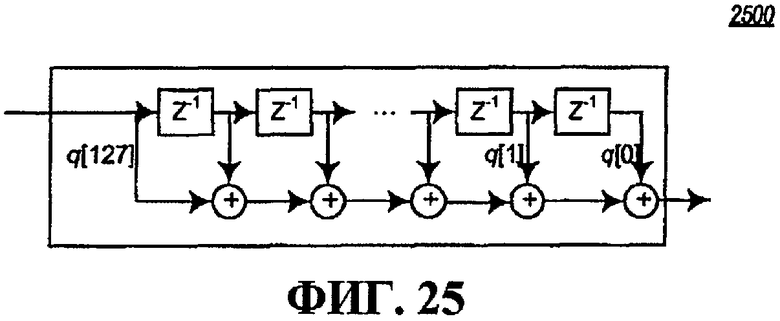
Коэффициенты {q[k], k=0, 2,..., 127} согласованного фильтра 1506 могут быть выбраны либо как бинарная последовательность {c[k], k=0, 2,..., 127}, либо как округленная опорная последовательность {round(s base[k]), k=0, 2,..., 127} преамбулы, как описано выше. Тем не менее, благодаря иерархической структуре бинарной последовательности {c[k]} реализация согласованного фильтра 1506 может быть упрощена, как показано в согласованном фильтре 2400 бинарной иерархической последовательности с Фиг.24, тогда как для округленной версии согласованный фильтр 2500 для реализации Конечной Импульсной Характеристики (FIR) показан на Фиг.25, который в одном подходе представляет собой FIR-фильтр с 127 линиями задержки с отводами.
Для подхода округленной версии, коэффициенты q[k], k=0, 2,..., 127 согласованного фильтра устанавливаются равными округленной величине Round(s base[k]) опорной последовательности преамбулы. Из наблюдений следует, что для всех опорных последовательностей преамбулы Round(s base[k]) принимает только значения из ряда {±2, ±1, 0}, что помогает снижению сложности аппаратного обеспечения, поскольку умножение на 2 может быть легко реализовано путем сдвига влево на 1 бит. Кроме того, как показано на Фиг.10, Round(s base[k]) сохраняет удовлетворительное свойство перекрестной корреляции с опорной последовательностью s base[k]. Сложность двух различных способов для реализации согласованного фильтра проиллюстрирована в таблице 1:
Сравнение реализаций согласованного фильтра
Количество операций для любой из ветвей I и Q приведено для длительности одной выборки Tsample=1/528 МГц=1,89 нс. Для каждого подхода опорные последовательности могут быть сохранены в справочной таблице, размер которой приведен в Таблице 1.
Выход согласованного фильтра 1506 обрабатывается посредством блока 1508 возведения в квадрат. Если обозначить принятые выборки как r[n], то квадрат модуля вывода согласованного фильтра может быть выражен следующим образом:
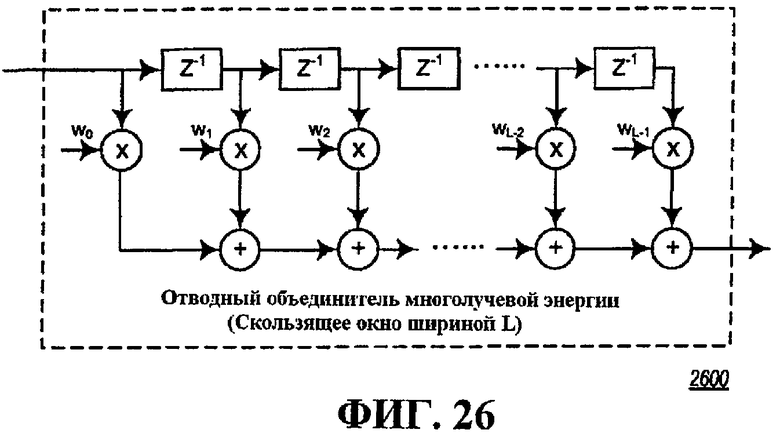
Следует отметить, что может быть выполнена операция Комбинирования с Равным Усилением (EGC), чтобы собрать энергию из всех многолучевых каналов:
где N представляет собой количество последовательных лучей, которые комбинируются, а D[n] представляет собой выход скользящего окна. EGC может быть реализовано как отводный многолучевой объединитель 2600 энергии, как показано на Фиг.26. L-отводный многолучевой объединитель 2600 энергии позволяет присваивать каждому отводу разный весовой коэффициент. Результаты операции EGC могут быть использованы модулем 1510 детектирования пакета и модулем 1540 оценки момента.
Как описано, на первом этапе в процессе синхронизации модуль 1510 детектирования пакета обнаруживает присутствие действительного пакета. Модуль 1510 детектирования пакета передает сигнал обнаружения пакета в модуль 1540 оценки хронирования после обнаружения действительного пакета. В частности, после подтверждения детектирования пакета (то есть после того, как модуль 1510 детектирования пакета указал, что пакет был обнаружен, путем установки det_flag на логическое истинное значение), модуль 1540 оценки хронирования активируется. Далее, модуль 1540 оценки хронирования обнаруживает хронирование и передает подтверждающий сигнал symbol_sync в модуль 1570 оценки СНЧ и синхронизации кадра 1570.
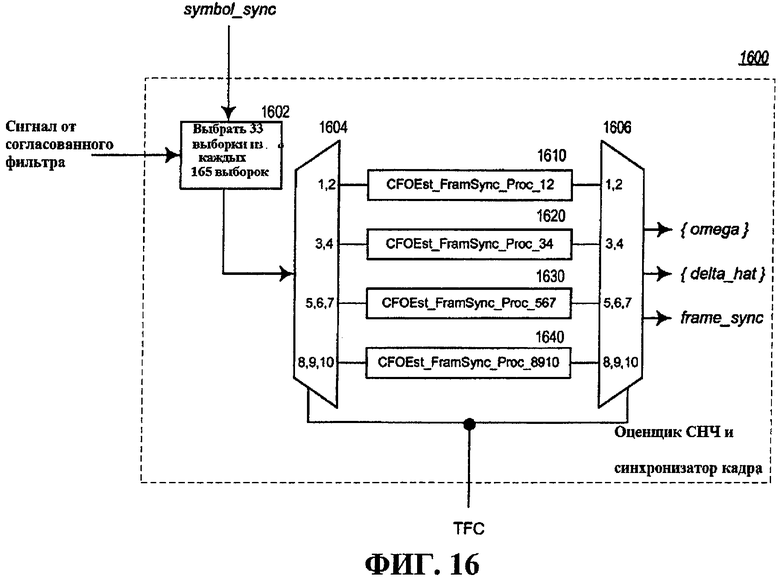
Фиг.16 представляет собой иллюстрацию примера оценщика СНЧ и синхронизатора 1600 кадра, который может быть реализован для модуля 1570 оценки СНЧ и синхронизации кадра. Оценщик СНЧ и синхронизатор 1600 кадра включает в себя дискретизатор 1602, демультиплексор 1604, мультиплексор 1606 и множество подмодулей 1610, 1620, 1630, 1640 оценщика СНЧ и синхронизатора кадра. Демультиплексор 1604 и мультиплексор 1606 направляют выбранные сигналы от согласованного фильтра 1506 к каждому из множества процессоров 1610, 1620, 1630, 1640 оценки СНЧ и синхронизации кадра на основании TFC. В одном подходе вместо принятого сигнала для выполнения оценки СНЧ и использования преимущества обработки усиления 10*log10l28=21 дБ используется выход согласованного фильтра 1506.
Фиг.17 представляет собой иллюстрацию процессора 1610 оценки СНЧ и синхронизации кадра для TFC-1 и TFC-2. Работа процессора идентична для TFC-1 и TFC-2. Сначала определяется частота, причем исходный СНЧ обозначается как ΔF i =ƒ T,i -ƒ R,i, где ƒ T,i и ƒ R,i представляют собой локальные частоты передатчика и приемника для полосы i, где i=1,2,3. Частотная ошибка вводит пренебрежимо малые потери для когерентного накопления 128 OFDM-выборок. Так, для n-го символа преамбулы в полосе i, m-й выход из согласованного фильтра 1506 примерно равен:

где t 3n+i,m представляет собой время выборки, соответствующее ƒ i [n,m], wMF представляет собой шумовую составляющую, а h i [m] представляет собой коэффициент m-го канального отвода для полосы i.
Согласно информации symbol_sync, полученной из модуля 1540 оценки момента, для каждых 165 выходов из согласованного фильтра 1506, 33 последовательные выборки выбираются в качестве выхода в частотный дискриминатор. В одном подходе информация symbol_sync идентифицирует первую выборку из 33 последовательных выборок. В еще одном подходе выборки не должны быть последовательными, и также может использоваться другое количество выборок.
Частотный дискриминатор вычисляет взаимную корреляцию между выходом согласованного фильтра 1506 двух последовательных символов преамбулы в одной полосе.

где T s=1/(528МГц) представляет собой период выборки, wFD представляет собой шумовую составляющую из частотного дискриминатора, а P=3×165=495 представляет собой задержку. Путем накопления 33 последовательных выходов частотного дискриминатора система может получить:
где wAC представляет собой шумовую составляющую от накопления, а m
0 представляет собой начальный индекс, полученный путем оценки хронирования. Следует отметить, что m
0 первоначально определяется так, чтобы максимизировать общую накопленную энергию  канала для Полосы-1, но применяется к Полосе-2 и Полосе-3 с пренебрежимо малыми потерями. В таблице 2 приведена покрывающая последовательность для стандартных преамбул:
канала для Полосы-1, но применяется к Полосе-2 и Полосе-3 с пренебрежимо малыми потерями. В таблице 2 приведена покрывающая последовательность для стандартных преамбул:
Покрывающая последовательность для стандартной преамбулы
для TFC 1, 2
для TFC 3, 4
для TFC 5, 6, 7
для TFC,8 9, 10
Как можно заметить в Таблице 2, для детектирования синхронизации кадра покрывающая последовательность для TFC-1 и TFC-2 сохраняет значение +1, за исключением последнего символа в каждой из трех полос. Изменение знака покрывающей последовательности в трех полосах помогает детектировать конец первых 24 символов преамбулы и генерировать сигнал frame_sync.
Тем не менее, из вышеприведенного уравнения для V i[n] также можно заметить, что поворот фазы из-за СНЧ равен 2πΔF i PT s, и поворот фазы принимает наибольшее возможное значение для Полосы-12 (в Группе Полос-4) с общим сдвигом 40 ppm:
θ max = 2π×(9240 МГц×40 ppm)×(3×165)×(1/528 МГц)=124,74°
Максимальное значение θ max указывает на следующее:
- Во-первых, поскольку |θ max|<π, то будет гарантировано, что для всех Групп Полос нет неоднозначности вида "±2nπ" для оценки СНЧ, то есть оцененный СНЧ является общим СНЧ, а не его частью.
- Во-вторых, поскольку |θ max| может принять значения, которые больше, чем π/2, то этого будет недостаточно для проверки двух гипотез:
H0: СНЧ (только θ)
H1: СНЧ и изменение (θ+π) знака покрывающей последовательности путем исследования только переменной V i [n] даже в сценарии, где шум отсутствует.
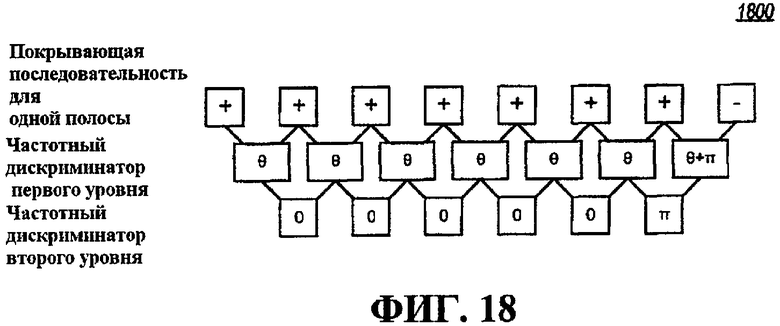
Для успешного детектирования изменения знака используется частотный дискриминатор второго уровня:
Z i [n]=V i [n+1]*{V i [n])*, n=0,1,...,5,
который проиллюстрирован в процессе 1800 детектирования синхронизации кадра по Фиг.18. Первый ряд представляет покрывающую последовательность для любой одной из трех полос (следует отметить, что покрывающие последовательности для всех трех полос идентичны). Второй ряд показывает фазу, связанную с выходами частотного дискриминатора первого уровня (следует отметить неоднозначность между θ и θ+π для Групп Полос высокой частоты), а третий ряд иллюстрирует фазу, связанную с выходами Частотного Дискриминатора второго уровня.
Конец покрывающей последовательности в каждой полосе детектируется посредством частотного дискриминатора второго уровня:
cfo_est_ctrl_i=sign[ℜ(Z i [n])]=-1.
Сигнал frame_sync генерируется на основании большинства из трех полос, то есть когда присутствуют, по меньшей мере, две полосы, указывающие конец покрывающей последовательности, то утверждается frame_sync=+1 и приемник переключается в режим оценки канала. Определение большинства может быть легко реализовано следующим образом:

Для оценки СНЧ по каждой из трех полос выход V i [n] частотного дискриминатора первого уровня накапливается следующим образом:

где n i представляет собой индекс начального символа для накопления в полосе i со знаком sign[ℜ(Z i [n i-1])]=1 исходной величины. Накопление продолжается до тех пор, пока не будет обнаружен конец покрывающей последовательности в этой полосе (cfo_est_ctrl_i=-1). Тогда V i обрабатывается посредством операции arctan(·), чтобы вычислить угол:
 = arctan[ℑ(V
i
)/ℜ(V
i
)]∈[-π, π), i=1, 2, 3,
= arctan[ℑ(V
i
)/ℜ(V
i
)]∈[-π, π), i=1, 2, 3,
и оценка сдвига частоты может быть вычислена следующим образом:
где F 0 =4224 МГц представляет собой опорную частоту генератора, а коэффициенты αi определяются как отношение средней частоты F i к опорной частоте F 0
α i =F i /F 0 , i=1,2,3.
Окончательные оценки ошибки по частоте для каждой из трех полос выражаются следующим образом:
а фазовая ошибка на выборку выражается как:

В завершение, фазовая ошибка передается на фазовращатель, чтобы скорректировать любые частотные ошибки.
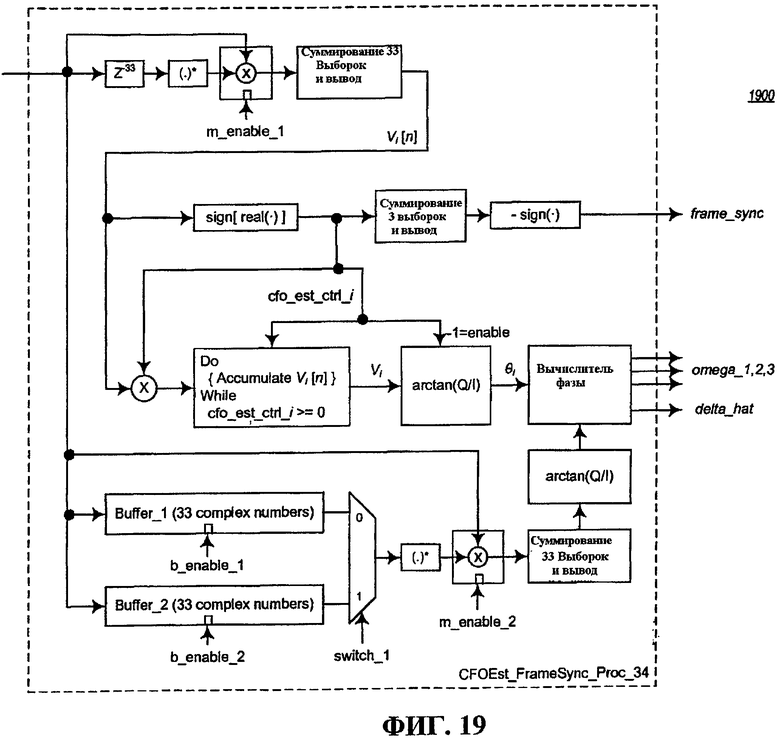
Фиг.19 представляет собой иллюстрацию примера процессора 1900 оценки СНЧ и синхронизации кадра, который реализует процессор 1620 оценки СНЧ и синхронизации кадра для TFC-3 и TFC-4. Поскольку работа процессора идентична для TFC-3 и TFC-4, описание сконцентрировано на TFC-3 для простоты представления.
Для частотной дискриминации TFC-3 и TFC-4 в одном аспекте используются два частотных дискриминатора первого уровня, чтобы обеспечить целевую эффективность оценки СНЧ. Первый частотный дискриминатор вычисляет взаимную корреляцию между выходами согласованного фильтра 1506 двух последовательных символов преамбулы в одной полосе:
где ƒ i [2n,m] и ƒ i[(2n+1),m] представляют собой m-й выход согласованного фильтра для (2n)-го и (2n+1)-го символа преамбулы в полосе i, а P i=165 представляет собой задержку. Согласно временной линии по Фиг.12, пары символов, используемые в вышеприведенном уравнении, перечислены ниже.
Путем накопления 33 последовательных выходов из первого частотного дискриминатора можно получить:
Второй частотный дискриминатор вычисляет взаимную корреляцию между выходами согласованного фильтра 1506 для символа 15 и 21 (Полоса-2) и символами 17 и 23 (Полоса-3). Следует отметить, что для этого выходы из согласованного фильтра 1506 для символа 15 (Полоса-2) и символа 17 (Полоса-3) сохраняются в двух буферах, размер каждого из которых составляет 33 комплексных числа. Путем накопления 33 последовательных выходов из второго частотного дискриминатора можно получить:

причем задержка принимает значение P 2=6×165=990.
Как можно заметить в Таблице 2, для детектирования синхронизации кадра покрывающая последовательность для TFC-3 и TFC-4 сохраняет значение +1, за исключением последнего символа в каждой из трех полос. Поворот фазы в  из-за СНЧ составляет 2πΔF
i
P
1
T
s
, и она принимает наибольшее возможное значение для Полосы-12 (в Группе Полос-4) с общим сдвигом 40 ppm:
из-за СНЧ составляет 2πΔF
i
P
1
T
s
, и она принимает наибольшее возможное значение для Полосы-12 (в Группе Полос-4) с общим сдвигом 40 ppm:
θ max =2π×(9240 МГц×40 ppm)×165×(1/528 МГц)=41,58°
Это значение θ max указывает на следующее:
- Во-первых, поскольку |θ max|<π, то будет гарантировано, что для всех Групп Полос отсутствует неоднозначность по "±2nπ" для оценки СНЧ, то есть оцененный СНЧ является общим СНЧ, а не его частью.
- Во-вторых, поскольку |θ max| принимает значения, которые меньше, чем π/2, то этого будет достаточно для проверки двух гипотез:
H0: СНЧ (только θ)
H1: СНЧ и изменение (θ+π) знака покрывающей последовательности путем исследования только переменной  даже в режиме низкого отношения сигнала к шуму.
даже в режиме низкого отношения сигнала к шуму.
Конец покрывающей последовательности в каждой полосе детектируется посредством первого частотного дискриминатора:

Аналогично TFC-1 и TFC-2, сигнал frame_sync генерируется на основе большинства из трех полос:

Для оценки СНЧ, для Полосы-2 и Полосы-3 выход первого частотного дискриминатора накапливается:

где n
i представляет собой индекс начального символа для накопления в Полосе-i. Накопление продолжается до тех пор, пока не будет обнаружен конец покрывающей последовательности в этой полосе (cfo_est_ctrl_i=-1). Следует отметить, что согласно временной диаграммы по Фиг.12 существует только одна переменная для Полосы-1, которая представляется весьма зашумленной. Так, в одном варианте осуществления не используется при оценке СНЧ, чтобы избежать снижения эффективности. используется только для детектирования синхронизации кадра.
Окончательные результаты  и
и  накопления обрабатываются посредством функции arctan(·), чтобы вычислить угол:
накопления обрабатываются посредством функции arctan(·), чтобы вычислить угол:

Усредненные результаты выражаются как:
где коэффициенты α i определяются как отношение между средней частотой F i и опорной частотой F 0 :
α i =F i / F 0 , i=2,3.
В одном подходе, если для выполнения оценки СНЧ используются только  и
и  , то остаточная ошибка не будет удовлетворительной. Для повышения эффективности оценка СНЧ будет основана на выходе из второго частотного дискриминатора, и углы
, то остаточная ошибка не будет удовлетворительной. Для повышения эффективности оценка СНЧ будет основана на выходе из второго частотного дискриминатора, и углы  и
и  будут использоваться только в качестве опорного. Это более подробно описано ниже.
будут использоваться только в качестве опорного. Это более подробно описано ниже.
Результаты  и
и  из второго частотного дискриминатора обрабатываются посредством функции arctan(·), чтобы вычислить угол:
из второго частотного дискриминатора обрабатываются посредством функции arctan(·), чтобы вычислить угол:

Тем не менее, поскольку задержка второго частотного дискриминатора составляет P
2=6×165=990, наибольшее возможное значение для  равно:
равно:
2π×(9240 МГц×40 ppm)×(6×165)×(1/528 МГц)= 249,48°
для Полосы-12 (Группа Полос-4) с общим сдвигом 40 ppm. Иначе говоря, угол  имеет неоднозначность ±2π, причем другими кандидатами являются:
имеет неоднозначность ±2π, причем другими кандидатами являются:

Таким образом, получаются две конкурирующие версии усредненных результатов:

и

Теперь опорный угол и (или ) может использоваться для выполнения выбора согласно следующему условию:
если

то

в противном случае
Окончательная оценка сдвига частоты задается следующим выражением:
или эквивалентно
и оценки СНЧ для каждой из трех полос задаются следующим образом:

Фазовая ошибка на выборку выражается как:
В завершение, фазовая ошибка передается на фазовращатель, чтобы скорректировать любые частотные ошибки.
Фиг.20 представляет собой иллюстрацию примера процессора 2000 оценки СНЧ и синхронизации кадра, который реализует процессор 1630 оценки СНЧ и синхронизации кадра для TFC-5, TFC-6 и TFC-7. Поскольку работа процессора идентична для TFC-5, TFC-6 и TFC-7, описание сконцентрировано на TFC-5 для простоты представления.
Сначала частотная дискриминация определяется посредством взаимной корреляции между выходами согласованного фильтра 1506 для двух последовательных символов преамбулы:

здесь P=165 представляет собой задержку. Следует отметить, что индекс полосы опущен, поскольку для TFC-5, TFC-6 или TFC-7 скачкообразное изменение частоты отсутствует.
Путем накопления 33 последовательных выходов из первого частотного дискриминатора можно получить:
Для детектирования синхронизации кадра поворот фазы в V[n] из-за СНЧ составляет 2πΔFPT s , и она принимает наибольшее возможное значение для Полосы-14 (в Группе Полос-5) с общим сдвигом 40 ppm:
θ max =2π×(10296 МГц×40 ppm)×165×(1/528 МГц)=46,33°
Это значение θ max указывает на следующее:
- Во-первых, поскольку |θ max|<π, то будет гарантировано, что для всех Групп Полос отсутствует неоднозначность по "±2nπ" для оценки СНЧ, то есть оцененный СНЧ является общим СНЧ, а не его частью.
- Во-вторых, поскольку |θ max| принимает значения, которые меньше, чем π/2, то этого будет достаточно для проверки двух гипотез:
H0: СНЧ (только θ)
H1: СНЧ и изменение (θ+π) знака покрывающей последовательности путем исследования только переменной V[n], даже в режиме низкого отношения сигнала к шуму.
Фиг.21 представляет собой иллюстрацию процесса 2100 детектирования синхронизации кадра для TFC-5, TFC-6 и TFC-7. Первый ряд на чертеже представляет собой покрывающую последовательность, а второй ряд представляет "sign[ℜ(V[n])]". Сигнал "frame_sync=+1" утверждается, когда в конце детектируется уникальная последовательность "-++".
Процессор 200 оценки СНЧ и синхронизации кадра также выполняет оценку СНЧ. Во время оценки СНЧ выход V[n] частотного дискриминатора накапливается:
где n 0 представляет собой индекс начального символа для накопления. Накопление продолжается до тех пор, пока не будет детектирована покрывающая последовательность (frame_sync=+1, или cfo_est_ctrl=-1). Тогда V будет передано в вычислитель arctan(·), чтобы вычислить угол:

и оценка сдвига частоты может быть вычислена следующим образом:
где F представляет собой среднюю частоту. Фазовая ошибка на выборку выражается как:
В завершение, фазовая ошибка передается на фазовращатель, чтобы скорректировать любые ошибки по частоте.
Фиг.22 иллюстрирует пример процессора оценки СНЧ и синхронизации кадра для TFC-8, TFC-9 и TFC-10. Поскольку алгоритм идентичен для всех трех TFC, описание сконцентрировано на TFC-8 для краткости представления.
Сначала частотная дискриминация определяется посредством взаимной корреляции между выходами согласованного фильтра 1506 для двух последовательных символов преамбулы в одной и той же полосе:
где ƒ i [n,m] и ƒ i[(n+1),m] представляют собой m-й выход из согласованного фильтра для (n)-го и (n+1)-го символа преамбулы в полосе i, а P=2×165=330 представляет собой задержку.
Путем накопления 33 последовательных частотного дискриминатора можно получить:
где wAC представляет собой шумовую составляющую от накопления, а m
0 представляет собой начальный индекс, полученный путем оценки времени. Следует отметить, что m
0 первоначально определяется так, чтобы максимизировать общую накопленную энергию канала для Полосы-1, но применяется к Полосе-2 с пренебрежимо малыми потерями.
Для детектирования синхронизации кадра поворот фазы из-за СНЧ составляет 2πΔF i PT s , и он принимает наибольшее возможное значение для Полосы-14 (в Группе Полос-5) с общим сдвигом 40 ppm:
θ max =2π×(10296 МГц×40 ppm)×(2×165)×(1/528 МГц)=92,66°
Это значение θ max указывает на следующее:
- Во-первых, поскольку |θ max|<π, то будет гарантировано, что для всех Групп Полос отсутствует неоднозначность по "±2nπ" для оценки СНЧ, то есть оцененный СНЧ является общим СНЧ, а не его частью.
- Во-вторых, поскольку |θ max| может принять значения, которые больше, чем π/2, этого недостаточно для проверки двух гипотез:
H0: СНЧ (только θ)
H1: СНЧ и изменение (θ+π) знака покрывающей последовательности путем исследования только переменной V i [n] даже в сценарии, где шум отсутствует.
Для успешного детектирования изменения знака используется частотный дискриминатор второго уровня:
Z i [n]=V i [n+1]·(V i [n])*, n=0,l,...,9,
который проиллюстрирован в процессе 2300 детектирования синхронизации кадра по Фиг.23. Первый ряд представляет покрывающую последовательность для любой одной из двух полос (следует отметить, что покрывающие последовательности для Полосы-1 и Полосы-2 идентичны). Второй ряд иллюстрирует фазу, связанную с выходами частотного дискриминатора первого уровня (следует отметить наличие неоднозначности между θ и θ+π для Групп Полос высокой частоты). Третий ряд иллюстрирует фазу, связанную с выходами частотного дискриминатора второго уровня. Пунктирная линия обозначает точку начала оценки СНЧ согласно временной линии с Фиг.14.
Процесс 2300 детектирования синхронизации кадра выполняется следующим образом. Поскольку покрывающая последовательность идентична для Полосы-1 и Полосы-2, любая из них может быть выбрана для этой цели, и индекс i канала может быть опущен для детектирования синхронизации кадра. Предполагается, что оценка СНЧ начнется не позже символа-15 в Полосе-1 (или символа-16 в Полосе-2), так что частотный дискриминатор второго уровня не пропустит первое "π". Далее, система детектирует следующие два поворота фазы "0" и "π" посредством следующих выражений:
π:sign[ℜ(Z[n])]=-1
0:sign[ℜ(Z[n])]=+1
Когда детектируется уникальный шаблон "π-0-π", сигнал frame_sync=+1 утверждается, и приемник переключается в режим оценки канала.
Как показано на Фиг.23, для оценки СНЧ фаза, связанная с частотным дискриминатором первого уровня, может быть в одном из двух состояний: θ или θ+π. Если состояние [n] определено как состояние V i [n], то:
Для каждой из двух полос выход V i [n] частотного дискриминатора первого уровня накапливается следующим образом:
где n i представляет собой индекс начального символа для накопления в Полосе-i. Поскольку переход состояния происходит, когда фаза частотного дискриминатора второго уровня равна π, состояние V i [n] может быть обновлено следующим образом:
state[n 0]=-1; n=n 0 ;
Do
{ n=n +1;
state[n]=state[n-1] · sign[ℜ(Z i.[n-1])];
}
while frame_sync ≠ +1
Когда frame_sync=+1 утверждается, приемник устанавливает сигнал cfo_est_ctrl=-1, чтобы остановить накопление, и V i обрабатывается посредством функции arctan(·), чтобы вычислить угол:

Оценка сдвига частоты может быть вычислена следующим образом:
где F 0 =4224 МГц представляет собой опорную частоту генератора, а коэффициенты α i определяются как отношение средней частоты F i к опорной частоте F 0:
α i =F i / F 0 , i=1, 2.
Окончательные оценки ошибки по частоте для каждой из двух полос выражаются следующим образом:
а фазовая ошибка на выборку выражается как:

В завершение, фазовая ошибка передается на фазовращатель, чтобы скорректировать любые частотные ошибки.
Следует понимать, что описанные в настоящем документе варианты осуществления могут быть реализованы посредством аппаратного обеспечения, программного обеспечения, аппаратно-программного обеспечения, межплатформенного программного обеспечения, микрокода или их любой комбинации. Когда системы и/или способы реализуются посредством программного обеспечения, аппаратно-программного обеспечения, межплатформенного программного обеспечения или микрокода, программного кода или сегментов кода, последние могут храниться на машиночитаемом носителе, таком как компонент хранения. Сегмент кода может представлять процедуру, функцию, подпрограмму, программу, рутинную процедуру, подпрограмму, модуль, пакет программного обеспечения, класс или любую комбинацию инструкций, структур данных или операторов программы. Сегмент кода может быть связан с другим сегментом кода или аппаратной схемой посредством передачи и/или приема информации, данных, аргументов, параметров или содержимого памяти. Информация, аргументы, параметры, данные и т.п. могут быть переданы, перенаправлены или транслированы, используя любое подходящее средство, включая совместное использование памяти, обмен сообщениями, пересылку маркера, сетевую передачу и т.п.
В случае программной реализации описанные здесь способы могут быть реализованы посредством модулей (например, процедур, функций и т.п.), которые выполняют описанные здесь функции. Программные коды могут храниться в блоках памяти выполняться процессорами. Блок памяти может быть реализован в самом процессоре или вне процессора. В последнем случае он может быть соединен с процессором различными средствами, известными в технике.
Выше были описаны примеры одного или более вариантов осуществления. Само собой разумеется, что невозможно описать все возможные комбинации компонентов или методологий для целей описания вышеупомянутых вариантов осуществления, однако, специалистам в данной области техники будет очевидно, что возможно реализовать множество дополнительных комбинаций и перестановок различных вариантов осуществления. Соответственно предполагается, что описанные варианты осуществления охватывают все подобные изменения, модификации и вариации, которые входят в рамки сущности и объема прилагаемой формулы изобретения. Сверх того, значение термина "включает в себя", использованного в описании или формуле изобретения, следует понимать во "включающем" смысле, аналогично термину "содержащий", использованному в пунктах формулы изобретения как переходное слово.

Изобретение относится к радиосвязи и может быть использовано в системе беспроводной связи для оценки сдвига несущей частоты и синхронизации кадра. Технический результат - повышение точности оценки сдвига несущей частоты и синхронизации кадра. Способ включает в себя этапы, на которых выполняют частотную дискриминацию первого уровня на, по меньшей мере, одном оцененном канальном отводе, чтобы сгенерировать распознанное значение частоты; оценивают фазовую ошибку из распознанного значения частоты; и детектируют предопределенный шаблон синхронизации кадра из распознанного значения частоты. 9 н. и 26 з.п. ф-лы, 26 ил.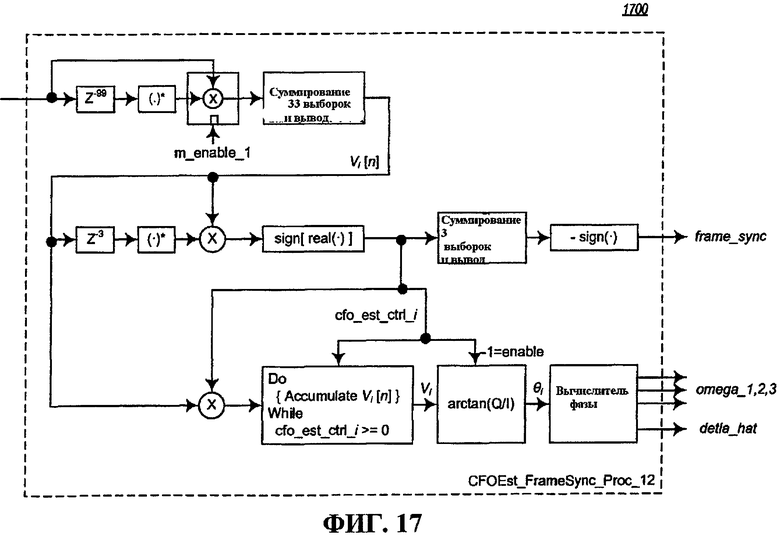
1. Способ выполнения комбинированной оценки сдвига несущей частоты и синхронизации кадра, содержащий этапы, на которых:
выполняют частотную дискриминацию первого уровня на, по меньшей мере, одном оцененном канальном отводе, чтобы сгенерировать распознанное значение частоты;
оценивают фазовую ошибку из распознанного значения частоты; и
определяют предопределенный шаблон синхронизации кадра из оцененной фазовой ошибки.
2. Способ по п.1, в котором предопределенный шаблон синхронизации кадра содержит последовательность чередующихся знаков.
3. Способ по п.1, в котором оцененная фазовая ошибка пропорциональна оцененной частотной ошибке.
4. Способ по п.1, дополнительно содержащий этап, на котором выполняют усовершенствованную частотную дискриминацию первого уровня на, по меньшей мере, одном оцененном канальном отводе, чтобы сгенерировать усовершенствованное распознанное значение частоты первого уровня, причем, по меньшей мере, один оцененный канальный отвод имеет задержку на предопределенное время.
5. Способ по п.4, в котором этап оценивания фазовой ошибки содержит оценивание фазовой ошибки из распознанного значения частоты и усовершенствованного распознанного значения частоты первого уровня.
6. Способ по п.4, дополнительно содержащий этап, на котором выполняют усовершенствованную частотную дискриминацию второго уровня на, по меньшей мере, одном оцененном канальном отводе, чтобы сгенерировать усовершенствованное распознанное значение частоты второго уровня.
7. Способ по п.1, дополнительно содержащий этап, на котором выполняют вычисление средневзвешенного значения оцененного сдвига несущей частоты.
8. Устройство для выполнения комбинированной оценки сдвига несущей частоты и синхронизации кадра, содержащее:
средство для выполнения частотной дискриминации первого уровня на, по меньшей мере, одном оцененном канальном отводе, чтобы сгенерировать распознанное значение частоты;
средство для оценки фазовой ошибки из распознанного значения частоты; и
средство для определения предопределенного шаблона синхронизации кадра из оцененной фазовой ошибки.
9. Устройство по п.8, в котором предопределенный шаблон синхронизации кадра содержит последовательность чередующихся знаков.
10. Устройство по п.8, в котором оцененная фазовая ошибка пропорциональна оцененной частотной ошибке.
11. Устройство по п.8, дополнительно содержащее средство для выполнения усовершенствованной частотной дискриминации первого уровня на, по меньшей мере, одном оцененном канальном отводе, чтобы сгенерировать усовершенствованное распознанное значение частоты первого уровня, причем, по меньшей мере, один оцененный канальный отвод имеет задержку на предопределенное время.
12. Устройство по п.11, в котором средство для оценки фазовой ошибки содержит средство для оценки фазовой ошибки из распознанного значения частоты и усовершенствованного распознанного значения частоты первого уровня.
13. Устройство по п.11, дополнительно содержащее средство для выполнения усовершенствованной частотной дискриминации второго уровня на, по меньшей мере, одном оцененном канальном отводе, чтобы сгенерировать усовершенствованное распознанное значение частоты второго уровня.
14. Устройство по п.8, дополнительно содержащее средство для выполнения вычисления средневзвешенного значения оцененного сдвига несущей частоты.
15. Приемное устройство беспроводной связи, содержащее:
память;
приемник, соединенный с памятью, причем приемник содержит схему, сконфигурированную для выполнения способа выполнения комбинированной оценки сдвига несущей частоты и синхронизации кадра, причем способ содержит этапы, на которых:
выполняют частотную дискриминацию первого уровня на, по меньшей мере, одном оцененном канальном отводе, чтобы сгенерировать распознанное значение частоты;
оценивают фазовую ошибку из распознанного значения частоты; и
определяют предопределенный шаблон синхронизации кадра из оцененной фазовой ошибки.
16. Приемное устройство беспроводной связи по п.15, в котором предопределенный шаблон синхронизации кадра содержит последовательность чередующихся знаков.
17. Приемное устройство беспроводной связи по п.15, в котором оцененная фазовая ошибка пропорциональна оцененной частотной ошибке.
18. Приемное устройство беспроводной связи по п.15, в котором способ дополнительно содержит этап выполнения усовершенствованной частотной дискриминации первого уровня на, по меньшей мере, одном оцененном канальном отводе, чтобы сгенерировать усовершенствованное распознанное значение частоты первого уровня, причем, по меньшей мере, один оцененный канальный отвод имеет задержку на предопределенное время.
19. Приемное устройство беспроводной связи по п.18, в котором оценивание фазовой ошибки содержит оценивание фазовой ошибки из распознанного значения частоты и усовершенствованного распознанного значения частоты первого уровня.
20. Приемное устройство беспроводной связи по п.18, в котором способ дополнительно содержит этап выполнения усовершенствованной частотной дискриминации второго уровня на, по меньшей мере, одном оцененном канальном отводе, чтобы сгенерировать усовершенствованное распознанное значение частоты второго уровня.
21. Приемное устройство беспроводной связи по п.15, в котором способ дополнительно содержит этап выполнения вычисления средневзвешенного значения оцененного сдвига несущей частоты.
22. Машиночитаемый носитель, хранящий команды, содержащие:
код для побуждения процессора выполнять частотную дискриминацию первого уровня на, по меньшей мере, одном оцененном канальном отводе, чтобы сгенерировать распознанное значение частоты;
код для побуждения процессора выполнять оценку фазовой ошибки из распознанного значения частоты; и
код для побуждения процессора определять предопределенный шаблон синхронизации кадра из оцененной фазовой ошибки.
23. Процессор оценки сдвига несущей частоты и синхронизации кадра, содержащий:
память, сконфигурированную, чтобы побуждать процессор реализовывать способ выполнения комбинированной оценки сдвига несущей частоты и синхронизации кадра, причем способ содержит:
выполнение частотной дискриминации первого уровня на, по меньшей мере, одном оцененном канальном отводе, чтобы сгенерировать распознанное значение частоты;
оценивание фазовой ошибки из распознанного значения частоты; и
определение предопределенного шаблона синхронизации кадра из оцененной фазовой ошибки.
24. Способ получения сигнала ультраширокополосной связи (UWB), содержащий этапы, на которых:
периодически выбирают набор выборок, включающий в себя определенное количество (n) выборок с выхода согласованного фильтра, на основании оценки хронирования символов в сигнале UWB, причем согласованный фильтр оперирует принятым сигналом UWB;
направляют выборки из набора выборок в каждый из множества подмодулей в соответствии с частотно-временным кодом (TFC);
в каждом из подмодулей определяют частоту на основании направленных выборок посредством перекрестно-коррелированных последовательных символов преамбулы для UWB полосы в направленных выборках;
накапливают определенное количество (n) перекрестных корреляций символов преамбулы; и
определяют синхронизацию кадра в направленном сигнале на основании перекрестных корреляций символов.
25. Способ по п.24, дополнительно содержащий этап, на котором:
оценивают фазовую ошибку на основании накопленных перекрестных корреляций символов преамбулы.
26. Способ по п.25, дополнительно содержащий этап, на котором:
корректируют частотные ошибки посредством подачи фазовой ошибки на фазовращатель.
27. Устройство получения сигнала ультраширокополосной связи (UWB), содержащее:
средство для периодического выбора набора выборок, включающего в себя определенное количество (n) выборок с выхода согласованного фильтра, на основании оценки хронирования символов в сигнале UWB, причем согласованный фильтр оперирует принятым сигналом UWB;
средство для направления выборок из набора выборок в каждый из множества подмодулей в соответствии с частотно-временным кодом (TFC);
средство для определения частоты на основании направленных выборок, в каждом из подмодулей, посредством перекрестно-коррелированных последовательных символов преамбулы для UWB полосы в направленных выборках;
средство для накопления определенного количества (п) перекрестных корреляций символов преамбулы; и
средство для определения синхронизации кадра в направленном сигнале на основании перекрестных корреляций символов.
28. Устройство по п.27, дополнительно содержащее:
средство для оценки фазовой ошибки на основании накопленных перекрестных корреляций символов преамбулы.
29. Устройство по п.28, дополнительно содержащее:
средство для коррекции частотных ошибок посредством подачи фазовой ошибки на фазовращатель.
30. Устройство беспроводной связи, содержащее:
память; и
по меньшей мере один процессор, соединенный с памятью, для получения сигнала ультраширокополосной связи (UWB), причем процессор сконфигурирован:
для периодического выбора набора выборок, включающего в себя определенное количество (n) выборок с выхода согласованного фильтра, на основании оценки хронирования символов в сигнале UWB, причем согласованный фильтр оперирует принятым сигналом UWB;
для направления выборок из набора выборок в каждый из множества подмодулей в соответствии с частотно-временным кодом (TFC);
для определения частоты на основании направленных выборок, в каждом из подмодулей, посредством перекрестно-коррелированных последовательных символов преамбулы для UWB полосы в направленных выборках;
для накопления определенного количества (n) перекрестных корреляций символов преамбулы; и
для определения синхронизации кадра в направленном сигнале на основании перекрестных корреляций символов.
31. Устройство беспроводной связи по п.30, в котором процессор дополнительно сконфигурирован:
для оценки фазовой ошибки на основании накопленных перекрестных корреляций символов преамбулы.
32. Устройство беспроводной связи по п.31, в котором процессор дополнительно сконфигурирован:
для коррекции частотных ошибок посредством подачи фазовой ошибки на фазовращатель.
33. Машиночитаемый носитель, содержащий хранящиеся в нем инструкции для получения сигнала ультраширокополосной связи (UWB), которые при выполнении в процессоре побуждают процессор выполнять:
инструкции для периодического выбора набора выборок, включающего в себя определенное количество (n) выборок с выхода согласованного фильтра, на основании оценки хронирования символов в сигнале UWB, причем согласованный фильтр оперирует принятым сигналом UWB;
инструкции для направления выборок из набора выборок в каждый из множества подмодулей в соответствии с частотно-временным кодом (TFC);
инструкции для определения частоты на основании направленных выборок, в каждом из подмодулей, посредством перекрестно-коррелированных последовательных символов преамбулы для UWB полосы в направленных выборках;
инструкции для накопления определенного количества (n) перекрестных корреляций символов преамбулы; и
инструкции для определения синхронизации кадра в направленном сигнале на основании перекрестных корреляций символов.
34. Машиночитаемый носитель по п.33, дополнительно содержащий инструкции для побуждения процессора выполнять:
инструкции для оценки фазовой ошибки на основании накопленных перекрестных корреляций символов преамбулы.
35. Машиночитаемый носитель по п.34, дополнительно содержащий инструкции для побуждения процессора выполнять:
инструкции для коррекции частотных ошибок посредством подачи фазовой ошибки на фазовращатель.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| ОПРЕДЕЛЕНИЕ СДВИГОВ ЧАСТОТЫ В СИСТЕМАХ СВЯЗИ | 1997 |
|
RU2195772C2 |
| US 6751444 В1, 25.06.2004 | |||
| US 6144696 А, 07.11.2000. | |||

