Изобретение, в общем, относится к модулю управления и способу управления для устройства регулируемых фаз газораспределения, программе для выполнения способа управления и носителю записи, на котором записана эта программа. В частности, изобретение относится к технологии изучения фазы клапана, которую определяют с помощью детектора фазы клапана в двигателе внутреннего сгорания, в котором фаза, по меньшей мере, одного из впускного клапана и выпускного клапана является регулируемой.
В настоящее время используют устройство регулируемых фаз газораспределения (РФГ), которое изменяет фазу (то есть угол поворота распределительного вала), при котором впускной клапан или выпускной клапан открывается/закрывается, на основе состояния работы двигателя. Такое устройство регулируемых фаз газораспределения меняет фазу впускного клапана или выпускного клапана при вращении распределительного вала, который открывает/закрывает впускной клапан или выпускной клапан, относительно, например, звездочки. Распределительный вал вращается гидравлически или с помощью устройства привода, например, электродвигателя.
Диапазон, в котором разрешено изменение фазы, может изменяться, например, в результате разбалансировки в цепи, которая соединяет коленчатый вал с распределительным валом. Поэтому фаза механически определяемого угла с наибольшей задержкой и фаза механически определяемого угла с наибольшим опережением изменяется в результате временных изменений в двигателе внутреннего сгорания. В этом случае, например, значение, выводимое датчиком положения кулачка, которое сохраняют как выходное значение, соответствующее фазе угла с наибольшей задержкой, может отличаться от значения, соответствующего фактической фазе угла с наибольшей задержкой. В соответствии с этим необходимо периодически изучать фазу, определяемую с помощью датчика положения кулачка, во время фазы механически определяемого угла с наибольшей задержкой.
В публикации заявки на патент Японии №2001-82190 (JP-A-2001-82190) описано устройство управления фазами газораспределения. Если изученное значение отклонения от опорного положения для устройства регулируемых фаз газораспределения будет компенсировано, устройство управления фазами газораспределения быстро выполняет изучение опорного положения. Устройство управления фазами газораспределения, описанное в JP-A-2001-82190, изучает отклонения фактической фазы газораспределения, рассчитываемое на основе угла поворота коленчатого вала и положении кулачка, по фазам газораспределения, соответствующим опорному положению для устройства регулируемых фаз газораспределения, и корректирует фактическую фазу газораспределения. Устройство управления фазами газораспределения затем управляет устройством регулируемых фаз газораспределения, таким образом, чтобы скорректированные фазы газораспределения соответствовали целевой фазе газораспределения, установленной на основе состояния работы двигателя. Устройство управления фазами газораспределения включает в себя модуль принудительного изучения, который обеспечивает принудительное изучение устройством управления фазами газораспределения, используя положение, соответствующее целевой фазе газораспределения, как опорное положение для устройства регулируемых фаз газораспределения, во время установленного периода после запуска двигателя, когда устранено полученное в результате изучения значение, используемое для изучения степени отклонения фактической фазы газораспределения от фазы газораспределения, соответствующей опорному положению, для устройства регулируемых фаз газораспределения.
С помощью устройства управления фазами газораспределения, описанного в JP-A-2001-82190, когда устраняют полученное в результате изучения значение, используемое для изучения степени фактического отклонения фазы газораспределения, которое рассчитывают на основе угла поворота коленчатого вала и положения кулачка по фазам газораспределения, от опорного положения, для устройства регулируемых фаз газораспределения, изучение выполняют принудительно, используя положение, соответствующее целевой фазе газораспределения, в качестве опорного положения устройства регулируемых фаз газораспределения во время установленного периода после запуска двигателя. Таким образом, можно быстро изучить фактическую степень отклонения фаз газораспределения от фаз газораспределения, соответствующих опорному положению, и отразить эту степень отклонения на управление фазами газораспределения. Поэтому можно точно выполнять управление, в результате чего обеспечиваются достаточно высокие выходные рабочие характеристики двигателя.
Для уменьшения вибрации, которая, вероятно, возникает при запуске двигателя, степень сжатия во время запуска двигателя может быть уменьшена путем значительной задержки фазы впускного клапана при запуске двигателя. В двигателе внутреннего сгорания, в котором фазой управляют таким образом, фаза, которую требуется использовать как опорную фазу, например, фаза угла клапана с наибольшей задержкой, не соответствует фазе, используемой во время работы двигателя. В таком двигателе внутреннего сгорания, если фазу изучают после запуска двигателя внутреннего сгорания, то есть, когда двигатель внутреннего сгорания работает, как описано в JP-A-2001-82190, фаза клапана может быть задержана в большей степени, чем необходимо. В этом случае, например, может ухудшиться выброс выхлопных газов.
В Публикации заявки на патент Японии №2004-156461 (JP-A-2004-156461) описано устройство управления регулируемыми фазами газораспределения, которое включает в себя модуль изучения опорного положения, который изучает опорное положение для фаз газораспределения перед запуском двигателя внутреннего сгорания, и модуль запрета управления запуском двигателя, который запрещает выполнение управления запуском двигателя внутреннего сгорания до тех пор, пока не будет закончено изучение этого опорного положения.
С помощью устройства управления регулируемыми фазами газораспределения в соответствии с JP-A-2004-156461, можно точно определять фактическую фазу газораспределения от начала запуска двигателя внутреннего сгорания и надежно управлять фактической фазой газораспределения до фазы газораспределения с целевым значением, которая соответствует запуску двигателя внутреннего сгорания. Поэтому двигатель внутреннего сгорания запускается более плавно. Кроме того, возможно избежать ситуации, в которой управление запуском двигателя внутреннего сгорания начинают до того, как будет закончено изучение опорного положения. Поэтому можно инициировать управление запуском двигателя внутреннего сгорания после того, будет надежно закончено изучение опорного положения.
Однако, как и в случае устройства управления регулируемыми фазами газораспределения, описанного в JP-A-2004-156461, если фаза клапана будет получена в результате изучения перед запуском двигателя внутреннего сгорания, то есть, когда распределительный вал остановлен, трудно изменить фазу клапана до значения фазы, при которой требуется изучать фазу клапана, поскольку генерируется высокое сопротивление вращению распределительного вала. Поэтому точность изучения может ухудшиться. Кроме того, движение транспортного средства не разрешено до тех пор, пока не будет закончено изучение опорного положения.
Изобретение направлено на модуль управления и способ управления устройством регулируемых фаз газораспределения, который сводит к минимуму ухудшение, например, выбросов выхлопных газов, программе, предназначенной для выполнения способа управления, и к носителю записи, на котором записана эта программа. Изобретение также направлено на модуль управления и способ управления, в котором фазу клапана точно изучают во время движения автомобиля, программу для выполнения способа управления и носитель записи, на котором записана эта программа.
Согласно первому объекту настоящего изобретения создан электронный модуль управления для устройства регулируемых фаз газораспределения транспортного средства с гибридным приводом, который изменяет фазу клапана, по меньшей мере, одного из впускного клапана и выпускного клапана в пределах первого диапазона от первой фазы, представляющей собой фазу с наибольшей задержкой, до второй фазы, представляющей собой фазу с наибольшим опережением, путем изменения фазы распределительного вала относительно выходного вала двигателя внутреннего сгорания, содержащий: детектор, который детектирует фазу клапана; первый модуль управления фазой клапана, который выполняет управление для перевода фазы клапана в первую фазу, когда двигатель внутреннего сгорания остановлен, в то время как транспортное средство движется, благодаря мощности привода, генерируемой источником мощности привода, который отличается от двигателя внутреннего сгорания; и модуль изучения, который изучает фазу клапана, определяемую с помощью детектора, когда фазой клапана управляют с переводом в первую фазу. Когда двигатель внутреннего сгорания работает, фазу клапана изменяют в пределах второго диапазона, который не включает в себя первую фазу. Когда двигатель внутреннего сгорания остановлен, фазой клапана управляют с переводом в первую фазу. Таким образом, когда менее вероятно, что выброс выхлопных газов ухудшится, из-за остановки двигателя внутреннего сгорания, фазу клапана переводят в первую фазу. Когда фазой клапана управляют с переводом в первую фазу, изучают фазу, определяемую с помощью детектора, который детектирует фазу клапана. Поэтому возможно изучать фазу, которую определяют с помощью детектора, в первой фазе, без ухудшения, например, выбросов выхлопных газов. В результате, становится возможным обеспечить модуль управления и способ управления для устройства регулируемых фаз газораспределения, который сводит к минимуму, например, ухудшение выброса выхлопных газов.
Предпочтительно, первый модуль управления фазой клапана выполняет управление для перевода фазы клапана в первую фазу, когда впрыск топлива остановлен в двигателе внутреннего сгорания.
Предпочтительно, двигатель внутреннего сгорания установлен в транспортном средстве, которое движется в режиме стабилизации скорости, выбранном из первого режима, в котором транспортное средство движется, используя мощность привода, генерируемую двигателем внутреннего сгорания, и второго режима, в котором транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, который отличается от двигателя внутреннего сгорания; и первый модуль управления фазой клапана выполняет управление для перевода фазы клапана в первую фазу, когда транспортное средство движется во втором режиме.
Согласно второму объекту настоящего изобретения создан электронный модуль управления для устройства регулируемых фаз газораспределения, который изменяет фазу клапана, по меньшей мере, одного из впускного клапана и выпускного клапана в пределах первого диапазона от первой фазы, представляющей собой фазу с наибольшей задержкой, до второй фазы, представляющей собой фазу с наибольшим опережением, путем изменения фазы распределительного вала относительно выходного вала двигателя внутреннего сгорания, содержащий: детектор, который детектирует фазу клапана; первый модуль управления фазой клапана, который выполняет управление для перевода фазы клапана в первую фазу, когда двигатель внутреннего сгорания остановлен; модуль изучения, который изучает фазу клапана, определяемую детектором, когда фазой клапана управляют с переводом в первую фазу; и второй модуль управления фазой клапана, который выполняет управление для изменения фазы клапана в пределах второго диапазона, который не включает в себя первую фазу, когда двигатель внутреннего сгорания работает.
Предпочтительно, первый модуль управления фазой клапана выполняет управление для перевода фазы клапана в первую фазу, когда впрыск топлива остановлен в двигателе внутреннего сгорания.
Предпочтительно, двигатель внутреннего сгорания установлен в транспортном средстве, которое движется в режиме стабилизации скорости, выбранном из первого режима, в котором транспортное средство движется, используя мощность привода, генерируемую двигателем внутреннего сгорания, и второго режима, в котором транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, который отличается от двигателя внутреннего сгорания; и первый модуль управления фазой клапана выполняет управление для перевода фазы клапана в первую фазу, когда транспортное средство движется во втором режиме.
Согласно третьему объекту настоящего изобретения создано устройство управления для транспортного средства, включающего в себя двигатель внутреннего сгорания и источник мощности привода, который отличается от двигателя внутреннего сгорания, при этом двигатель внутреннего сгорания содержит электронный модуль управления для устройства регулируемых фаз газораспределения, который изменяет фазу клапана, по меньшей мере, одного из впускного клапана и выпускного клапана в пределах диапазона от первой фазы, представляющей собой фазу с наибольшей задержкой, до второй фазы, представляющей собой фазу с наибольшим опережением, путем изменения фазы распределительного вала относительно выходного вала двигателя внутреннего сгорания, причем устройство управления содержит: детектор, который детектирует фазу клапана; первый модуль управления фазой клапана, который выполняет управление для перевода фазы клапана в первую фазу, когда двигатель внутреннего сгорания остановлен; модуль изучения, который изучает фазу клапана, определяемую детектором, когда фазой клапана управляют с переводом в первую фазу; второй модуль управления фазой клапана, который выполняет управление таким образом, что транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, без работы двигателя внутреннего сгорания; и третий модуль управления фазой клапана, который выполняет управление так, что распределительный вал вращается с помощью мощности привода, генерируемой вращающимся электрическим устройством, когда транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, без работы двигателя внутреннего сгорания, причем первый модуль управления фазой клапана выполняет управление для перевода фазы клапана в первую фазу, когда распределительный вал вращается с помощью мощности привода, генерируемой вращающимся электрическим устройством.
Предпочтительно, второй модуль управления фазой клапана выполняет управление таким образом, что транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, без работы двигателя внутреннего сгорания, когда удалены данные, которые обозначают определенную фазу.
Предпочтительно, устройство дополнительно содержит четвертый модуль управления фазой клапана, который выполняет управление таким образом, что фаза клапана изменяется в пределах диапазона, который не включает в себя первую фазу, во время работы двигателя внутреннего сгорания.
Предпочтительно, второй модуль управления фазой клапана выполняет управление таким образом, что транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, когда заданное условие изучения удовлетворяется.
Предпочтительно, заданное условие изучения включает в себя условие, что управление отсечкой подачи топлива выполняют для двигателя внутреннего сгорания.
Согласно четвертому объекту настоящего изобретения создан способ управления для устройства регулируемых фаз газораспределения транспортного средства с гибридным приводом, который изменяет фазу клапана, по меньшей мере, одного из впускного клапана и выпускного клапана в пределах первого диапазона от первой фазы, представляющей собой фазу с наибольшей задержкой, до второй фазы, представляющей собой фазу с наибольшим опережением, путем изменения фазы распределительного вала относительно выходного вала двигателя внутреннего сгорания, при котором: определяют фазу клапана; выполняют управление для перевода фазы клапана в первую фазу, когда двигатель внутреннего сгорания остановлен, в то время как транспортное средство движется, благодаря мощности привода, генерируемой источником мощности привода, который отличается от двигателя внутреннего сгорания; и изучают фазу клапана, которую определяют, когда фазой клапана управляют с переводом в первую фазу.
Предпочтительно, управление переводом фазы клапана в первую фазу выполняют, когда в двигателе внутреннего сгорания останавливают впрыск топлива.
Предпочтительно, когда двигатель внутреннего сгорания установлен в транспортном средстве, которое движется в режиме стабилизации скорости, выбранном из первого режима, в котором транспортное средство движется, используя мощность привода, генерируемую двигателем внутреннего сгорания, и вторым режимом, в котором транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, который отличается от двигателя внутреннего сгорания, выполняют управление для перевода фазы клапана в первую фазу, когда транспортное средство движется во втором режиме.
Согласно пятому объекту настоящего изобретения создан машиночитаемый носитель, на котором записана программа, с помощью которой компьютер воплощает вышеописанный способ управления.
Согласно шестому объекту настоящего изобретения создан способ управления для устройства регулируемых фаз газораспределения, который изменяет фазу клапана, по меньшей мере, одного из впускного клапана и выпускного клапана в пределах первого диапазона от первой фазы, представляющей собой фазу с наибольшей задержкой, до второй фазы, представляющей собой фазу с наибольшим опережением, путем изменения фазы распределительного вала относительно выходного вала двигателя внутреннего сгорания, при котором: определяют фазу клапана; выполняют управления для перевода фазы клапана в первую фазу, когда двигатель внутреннего сгорания остановлен; изучают фазу клапана, которую определяют, когда фазой клапана управляют с переводом в первую фазу; и выполняют управление для изменения фазы клапана в пределах второго диапазона, который не включает в себя первую фазу, во время работы двигателя внутреннего сгорания.
Предпочтительно, управление переводом фазы клапана в первую фазу выполняют, когда в двигателе внутреннего сгорания останавливают впрыск топлива.
Предпочтительно, когда двигатель внутреннего сгорания установлен в транспортном средстве, которое движется в режиме стабилизации скорости, выбранном из первого режима, в котором транспортное средство движется, используя мощность привода, генерируемую двигателем внутреннего сгорания, и вторым режимом, в котором транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, который отличается от двигателя внутреннего сгорания, выполняют управление для перевода фазы клапана в первую фазу, когда транспортное средство движется во втором режиме.
Согласно седьмому объекту настоящего изобретения создан машиночитаемый носитель, на котором записана программа, с помощью которой компьютер воплощает вышеописанный способ управления.
Согласно восьмому объекту настоящего изобретения создан способ управления для транспортного средства, включающего в себя двигатель внутреннего сгорания и источник мощности привода, который отличается от двигателя внутреннего сгорания, при этом двигатель внутреннего сгорания содержит устройство регулируемых фаз газораспределения, которое изменяет фазу клапана, по меньшей мере, одного из впускного клапана и выпускного клапана в пределах диапазона от первой фазы, представляющей собой фазу с наибольшей задержкой, до второй фазы, представляющей собой фазу с наибольшим опережением, путем изменения фазы распределительного вала относительно выходного вала двигателя внутреннего сгорания, при этом согласно способу: определяют фазу клапана; выполняют управления для перевода фазы клапана в первую фазу, когда двигатель внутреннего сгорания остановлен; изучают фазу клапана, определяемую, когда фазой клапана управляют с переводом в первую фазу; выполняют управления таким образом, что транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, без работы двигателя внутреннего сгорания; выполняют управление так, что распределительный вал вращается, благодаря мощности привода, генерируемой вращающимся электрическим устройством, когда транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, без работы двигателя внутреннего сгорания; и выполняют управление для перевода фазы клапана в первую фазу, когда распределительный вал вращается, благодаря мощности привода, генерируемой вращающимся электрическим устройством.
Предпочтительно, управление выполняют так, что транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, без работы двигателем внутреннего сгорания, когда удалены данные, которые обозначают определенную фазу.
Предпочтительно, дополнительно выполняют управление таким образом, что фаза клапана изменяется в пределах диапазона, который не включает в себя первую фазу, когда двигатель внутреннего сгорания работает.
Предпочтительно, управление выполняют так, что транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, когда заданное условие изучения удовлетворяется.
Предпочтительно, заданное условие изучения включает в себя условие, в котором выполняют управление отсечкой подачи топлива для двигателя внутреннего сгорания.
Согласно девятому объекту настоящего изобретения создан машиночитаемый носитель, на котором записана программа, с помощью которой компьютер воплощает вышеописанный способ управления.
Описанные выше и другие свойства и преимущества изобретения будут понятны из следующего описания вариантов выполнения со ссылкой на приложенные чертежи, на которых одинаковые или соответствующие элементы будут обозначены одинаковыми ссылочными позициями. На чертежах:
Фиг.1 - вид, схематично представляющий структуру силовой передачи гибридного транспортного средства;
Фиг.2 - коллинеарная схема устройства распределения мощности;
Фиг.3 - коллинеарная схема трансмиссии;
Фиг.4 - вид, схематично представляющий структуру двигателя гибридного транспортного средства;
Фиг.5 - график, представляющий карту, которая определяет фазу впускного клапана;
Фиг.6 - вид в поперечном сечении, представляющий впускное устройство РФГ;
Фиг.7 - вид в поперечном сечении по линии VII-VII с фиг.6;
Фиг.8 - первый вид в поперечном сечении по линии VIII-VIII с фиг.6;
Фиг.9 - второй вид в поперечном сечении по линии VIII-VIII с фиг.6;
Фиг.10 - вид в поперечном сечении по линии Х-Х с фиг.6;
Фиг.11 - вид в поперечном сечении по линии XI-XI с фиг.6;
Фиг.12 - график, представляющий степень снижения скорости, которую элементы впускного устройства РФГ реализуют во взаимодействии;
Фиг.13 - график, представляющий взаимосвязь между фазой направляющей пластины относительно звездочки и фазой впускного клапана;
Фиг.14 - функциональная блок-схема электронного модуля управления (ЭМУ) в соответствии с первым вариантом выполнения изобретения;
Фиг.15 - график, представляющий диапазоны, в которых разрешено изменение фазы впускного клапана;
Фиг.16 - блок-схема последовательности операций, представляющая процедуру управления программой, выполняемой ЭМУ;
Фиг.17 - функциональная блок-схема ЭМУ в соответствии со вторым вариантом выполнения изобретения; и
Фиг.18 - блок-схема последовательности операций, представляющая процедуру управления программой, выполняемой ЭМУ в соответствии со вторым вариантом выполнения изобретения.
Далее будут описаны варианты выполнения изобретения со ссылкой на прилагаемые чертежи. В следующем описании одинаковые или соответствующие элементы будут обозначены одинаковыми ссылочными позициями. Названия и функции элементов, имеющих одинаковые ссылочные позиции, также одинаковы. В соответствии с этим, описание элементов, имеющих одинаковые ссылочные позиции, будет приведено далее только один раз.
Силовая передача гибридного транспортного средства, в котором предусмотрен модуль управления в соответствии с первым вариантом выполнения настоящего изобретения, будет описана со ссылкой на фиг.1. Модуль управления в соответствии с первым вариантом выполнения изобретения воплощен, когда электронный модуль управления (ЭМУ) 100 выполняет программу, сохраняемую в постоянном запоминающем устройстве (ПЗУ) 102 ЭМУ 100. ЭМУ 100 может быть разделен на множество ЭМУ. Программа, которую выполняет ЭМУ 100, может быть записана на CD или DVD диск, и может распространяться на рынке.
Как показано на фиг.1, силовая передача сформирована, в основном, из двигателя 1000, первого электродвигателя-генератора (ЭДГ) 200, устройства 300 делителя мощности, второго ЭДГ 400 и трансмиссии 500. Устройство 300 делителя мощности предусмотрено между двигателем 1000 и первым ЭДГ 200. Устройство 300 делителя мощности комбинирует крутящий момент от двигателя 1000 с крутящим моментом от первого ЭДГ 200, или разделяет крутящий момент от двигателя 1000 на крутящий момент, который передают в первый ЭДГ 200, и крутящий момент, который передают для привода колес.
Двигатель 1000 представляет собой известный силовой модуль, в котором сгорает топливо для генерирования энергии привода. Рабочим состоянием двигателя 1000, таким как степень открывания дроссельной заслонки (величина всасываемого воздуха), количество подаваемого топлива и распределение зажигания, управляют электрически. Управление выполняют с помощью ЭМУ 100, который образован, в основном, из микрокомпьютера. Двигатель 1000 будет подробно описан ниже.
Первый ЭДГ 200 представляет собой, например, трехфазную вращающуюся электрическую машину переменного тока, и имеет конструкцию, обеспечивающую возможность его функционирования в качестве электрического двигателя (электродвигателя) и также выполняет функцию генератора. Первый ЭДГ 200 соединен с модулем 700 накопителя, например, батареей, через обратный преобразователь 210. Выходной крутящий момент из первого ЭДГ 200 или крутящий момент регенерации соответствующим образом регулируют путем управления обратным преобразователем 210. Обратным преобразователем 210 управляют с помощью ЭМУ 100. Статор (не показан) первого ЭДГ 200 фиксирован так, что он не вращается.
Устройство 300 делителя мощности представляет собой известное устройство зубчатой передачи, которое формирует дифференциальный эффект, используя три вращающихся элемента, такие как, солнечное зубчатое колесо (S) 310, которое представляет собой внешнее зубчатое колесо, кольцевое зубчатое колесо (R) 320, которое представляет собой внутреннее зубчатое колесо, установленное коаксиально с солнечным зубчатым колесом (S) 310, и водило (С) 330, которое поддерживает зубья, зацепленные с солнечным зубчатым колесом (S) 310 и кольцевым зубчатым колесом (R) 320 таким образом, что зубья могут вращаться вокруг своих осей и поворачиваться вокруг солнечного зубчатого колеса (S) 310. Выходной вал двигателя 1000 соединен с водилом (С) 330, которое представляет собой первый вращающийся элемент, через демпфер. Другими словами, водило (С) 330 используется как входной элемент.
Ротор (не показан) первого ЭДГ 200 соединен с солнечным зубчатым колесом (S) 310, которое представляет собой второй вращающийся элемент. Поэтому солнечное зубчатое колесо (S) 310 используется как, так называемый, элемент реактивной силы, и кольцевое зубчатое колесо (R) 320, которое представляет собой третий вращающийся элемент, используется как выходной элемент. Кольцевое зубчатое колесо (R) 320 соединено с выходным валом 600, который соединен с колесами привода (не показаны).
На фиг.2 показана коллинеарная схема для устройства 300 делителя мощности. Как показано на фиг.2, когда крутящий момент от первого ЭДГ 200 подают на солнечное зубчатое колесо (S) 310, как реактивный крутящий момент для крутящего момента, выводимого из двигателя 1000, и подают на водило (С) 330, кольцевое зубчатое колесо (R) 320, которое используется как выходной элемент, выводит крутящий момент, который получают путем увеличения или уменьшения крутящего момента, выводимого из двигателя 1000, используя реактивный крутящий момент. В этом случае, ротор первого ЭДГ 200 вращается от этого крутящего момента, и первый ЭДГ 200 используется как генератор. Если скорость вращения (выходная скорость вращения) кольцевого зубчатого колеса (R) 320 постоянна, скорость вращения двигателя 1000 может постоянно (бесступенчато) изменяться путем регулирования скорости вращения первого ЭДГ 200. Таким образом, управление для установления скорости вращения двигателя 1000 с таким значением, при котором достигается оптимальная экономичность топлива, выполняют путем управления первым ЭДГ 200. Управление выполняет ЭМУ 100.
Когда двигатель 1000 останавливают во время движения транспортного средства, первый ЭДГ 200 вращается в обратном направлении. В этом состоянии, если первый ЭДГ 200 используется, как электродвигатель для получения крутящего момента, который прикладывают в направлении вращения вперед, крутящий момент, который прикладывают в таком направлении, что двигатель 1000 вращается в направлении вперед, прикладывается к двигателю 1000, который соединен с водилом (С) 330. Таким образом, двигатель 1000 запускается первым ЭДГ 200 (прокручивание двигателя или запуск двигателя). В этом случае крутящий момент, который прикладывается в таком направлении, что вращение выходного вала 600 остановлено, прикладывают к выходному валу 600. Поэтому крутящий момент привода, используемый для обеспечения движения транспортного средства, поддерживается путем управления крутящим моментом, выводимым вторым ЭДГ 400, и, одновременно, обеспечивается плавный запуск двигателя 1000. Система гибридного привода такого типа называется гибридной системой типа механического делителя или гибридной системой с делителем.
Рассмотрим снова фиг.1, на которой второй ЭДГ 400 представляет собой, например, трехфазную вращающуюся электрическую машину переменного тока, и имеет конструкцию, обеспечивающую его функцию в качестве электродвигателя и функцию в качестве генератора. Второй ЭДГ 400 соединен с модулем 700 накопителя, например, батареей, через обратный преобразователь 410. Крутящий момент, получаемый в результате операции подачи питания, и крутящий момент, получаемый во время операции регенерации, регулируют путем управления обратным преобразователем 410. Статор (не показан) второго ЭДГ 400 фиксирован и вращается.
Трансмиссия 500 сформирована из набора устройства планетарной передачи Равинье (Ravigneaux). Трансмиссия 500 включает в себя первое солнечное зубчатое колесо (S1) 510 и второе солнечное зубчатое колесо (S2) 520, которые представляют собой внешние зубчатые колеса. Первые сателлиты 531 зацеплены с первым зубчатым солнечным колесом (S1) 510, первые сателлиты 531 зацеплены со вторыми сателлитами 532, и вторые сателлиты 532 зацеплены с кольцевым зубчатым колесом (R) 540, которое расположено коаксиально с солнечными зубчатыми колесами 510 и 520.
Сателлиты 531 и 532 поддерживаются с помощью водил (С) 550 таким образом, что сателлиты 531 и 532 могут вращаться вокруг своих осей и поворачиваться вокруг солнечных зубчатых колес 510 и 520. Второе солнечное зубчатое колесо (S2) 520 зацеплено со вторыми сателлитами 532. Поэтому первое солнечное зубчатое колесо (S1) 510 и кольцевое зубчатое колесо (R) 540 вместе с сателлитами 531 и 532 составляют устройство, которое соответствует устройству планетарной зубчатой передачи с двумя сателлитами. Второе солнечное зубчатое колесо (S2) 520 и кольцевое зубчатое колесо (R) 540 вместе со вторыми сателлитами 532 составляют устройство, которое соответствует устройству планетарной зубчатой передачи с одним сателлитом.
Трансмиссия 500 дополнительно включает в себя В1 тормоз 561, который избирательно блокирует первое солнечное зубчатое колесо (S1) 510, и В2 тормоз 562, который избирательно блокирует кольцевое зубчатое колесо (R) 540. Эти тормоза 561 и 562 представляют собой, так называемые, элементы фрикционного сцепления, которые генерируют силу сцепления, используя силу трения. Многодисковое устройство сцепления или устройство сцепления ленточного типа можно использовать в качестве тормозов 561 и 562. Каждый из тормозов 561 и 562 выполнен так, что его возможности по крутящему моменту постоянного изменяются на основе силы сцепления, которую генерируют гидравлически. Кроме того, второй ЭДГ 400 соединен со вторым солнечным зубчатым колесом (S2) 520. Водило (С) 550 соединено с выходным валом 600.
Поэтому в трансмиссии 500 второе солнечное зубчатое колесо (32) 520 используется как, так называемый, входной элемент, и водило (С) 550 используется как выходной элемент. Когда включают В1 тормоз 561, выбирают высокую передачу с передаточным отношением больше, чем "1". Когда включают В2 тормоз 562 вместо В1 тормоза 561, выбирают низкую передачу, передаточное отношение которой выше, чем передаточное отношение высокой передачи.
Трансмиссия 500 переключается между этими зубчатыми колесами на основе состояния привода транспортного средства, такого как скорость транспортного средства и требуемая мощность для привода (или величина операции педали акселератора). Более конкретно, диапазоны переключения установлены заранее в форме карты (диаграмма переключения), и управление выполняют для выбора одного из зубчатых колес на основе детектируемого состояния привода транспортного средства.
На фиг.3 показана коллинеарная диаграмма для трансмиссии 500. Как показано на фиг.3, когда кольцевое зубчатое колесо (R) 540 фиксируют с помощью В2 тормоза 562, выбирают нижнюю передачу L, и крутящий момент, выводимый из второго ЭДГ 400, усиливается на основе передаточного отношения, и этот усиленный крутящий момент прикладывают к выходному валу 600. Когда первое солнечное зубчатое колесо (S1) 510 блокируют с помощью В1 тормоза 561, выбирают верхнюю передачу Н с передаточным отношением ниже, чем у нижней передачи L. Передаточное отношение верхней передачи Н также больше, чем "1". Поэтому крутящий момент, выводимый из второго ЭДГ 400, усиливается на основе передаточного отношения, и усиленный крутящий момент прикладывают к выходному валу 600.
Когда поддерживают нижнюю передачу L или верхнюю передачу Н, крутящий момент, который получают путем усиления крутящего момента, выводимого из второго ЭДГ 400 на основе передаточного отношения, прикладывают к выходному валу 600. Однако, когда выполняют переключение передач, крутящий момент, на который влияют возможности по крутящему моменту тормозов 561 и 562, и крутящий момент инерции, из-за изменения скорости вращения, прикладывают к выходному валу 600. Крутящий момент, который прикладывают к выходному валу 600, представляет собой положительный крутящий момент, когда второй ЭДГ 400 находится в ведущем состоянии, и отрицательный крутящий момент, когда второй ЭДГ 400 находится в ведомом состоянии.
В первом варианте выполнения изобретения гибридное транспортное средство движется в одном из первого режима, в котором гибридное транспортное средство движется, используя только энергию привода, генерируемую двигателем 1000, второго режима, в котором двигатель 1000 остановлен, и гибридное транспортное средство движется, используя только энергию привода, генерируемую вторым ЭДГ 400, и третьего режима, в котором гибридное транспортное средство движется, используя как энергию привода, генерируемую двигателем 1000, так и энергию привода, генерируемую вторым ЭДГ 400. Режим стабилизации скорости выбирают на основе различных параметров, таких как величина операции педали акселератора, и оставшаяся емкость модуля 700 накопителя.
Технологию, известную в области техники, к которой относится гибридное транспортное средство, можно использовать для формирования способа выбора режима стабилизации скорости. Поэтому подробное описание этого способа выбора режима стабилизации скорости ниже не представлено. Кроме того, количество режимов стабилизации скорости не ограничивается тремя.
Двигатель 1000 будет более подробно описан со ссылкой на фиг.4. Двигатель 1000 представляет собой восьмицилиндровый V-образный двигатель, который включает в себя ряд 1010 "А" и ряд 1012 "В", каждый из которых содержит по четыре цилиндра. Следует отметить, что также можно использовать другие двигатели, кроме восьмицилиндрового V-образного двигателя.
Воздух, который проходит через очиститель 1020 воздуха, подают в двигатель 1000. Дроссельная заслонка 1030 регулирует количество воздуха, подаваемого в двигатель 1000. Дроссельная заслонка 1030 представляет собой дроссельную заслонку с электронным управлением, с приводом от двигателя.
Воздух подает в цилиндр 1040 через впускной канал 1032. Воздух затем смешивается с топливом в цилиндре 1040 (камере сгорания). Топливо впрыскивают через инжектор 1050 непосредственно в цилиндр 1040. А именно, отверстие впрыска инжектора 1050 расположено внутри цилиндра 1040.
Топливо впрыскивают в цилиндр 1040 во время такта впуска. Момент времени, в который выполняют впрыск топлива, не обязательно должен представлять собой такт впуска. Описание первого варианта выполнения изобретения будет представлено с предположением, что двигатель 1000 представляет собой двигатель с прямым впрыском топлива, в котором отверстие впрыска инжектора 1050 расположено внутри цилиндра 1040. Кроме инжектора 1050 для прямого впрыска, может быть предусмотрен инжектор для впрыска во впускной канал. В качестве альтернативы, может быть предусмотрен только один инжектор для впрыска во впускной канал.
Воздушно-топливная смесь в цилиндре 1040 воспламеняется с помощью свечи 1060 зажигания и затем сгорает. Сгоревшая воздушно-топливная смесь, а именно выхлопные газы, очищают с помощью трехканального катализатора 1070 и затем выпускают наружу из транспортного средства. Поршень 1080 проталкивается вниз в результате сгорания воздушно-топливной смеси, в результате чего происходит вращение коленчатого вала 1090.
Впускной клапан 1100 и выпускной клапан 1110 предусмотрены в верхней части цилиндра 1040. Впускным клапаном 1100 управляют с помощью распределительного вала 1120 впуска, и выпускным клапаном 1110 управляют с помощью распределительного вала 1130 выпуска. Распределительный вал 1120 впуска и распределительный вал 1130 выпуска соединены друг с другом, например, с помощью цепи или зубчатой передачи и вращаются с одинаковой скоростью вращения.
Распределительный вал 1120 впуска и распределительный вал 1130 выпуска соединены с коленчатым валом 1090, например, через цепь или ремень. Скорость вращения каждого из распределительного вала 1120 впуска и распределительного вала 1130 выпуска составляет половину скорости вращения коленчатого вала 1090.
Фазой (моментами времени открывания/закрывания) впускного клапана 1100 управляют с помощью устройства 2000 РФГ впуска, которое установлено на распределительном валу 1120 впуска. Фазой (моментами времени открывания/закрывания) выпускного клапана 1110 управляют с помощью устройства 3000 РФГ выпуска, которое установлено на распределительном валу 1130 выпуска.
В первом варианте выполнения изобретения распределительный вал 1120 впуска и распределительный вал 1130 выпуска вращаются с помощью устройств 2000 и 3000 РФГ, соответственно, в результате чего выполняют управление фазой впускного клапана 1100 и фазой выпускного клапана 1110. Таким образом, фазу впускного клапана 1100 и фазу выпускного клапана 1110 изменяют путем изменения фазы распределительного вала 1120 впуска относительно коленчатого вала 1090 и фазы распределительного вала 1130 выпуска относительно коленчатого вала 1090, используя устройства 2000 и 3000 РФГ соответственно. Однако способ управления фазой не ограничивается этим.
Устройство 2000 РФГ впуска работает от электродвигателя 2060 (не показан на фиг.4). Электродвигателем 2060 управляют с помощью ЭМУ 100. Величину электрического тока, протекающего через электродвигатель 2060, определяют с помощью амперметра (не показан) и напряжение, прикладываемое к электродвигателю 2060, определяют с помощью вольтметра (не показан), и сигнал, обозначающий величину электрического тока, и сигнал, обозначающий напряжение, передают в ЭМУ 100.
Устройство 3000 РФГ выпуска работает с использованием гидравлической схемы. Следует отметить, что устройство 2000 РФГ впуска может работать с использованием гидравлической схемы. Следует отметить, что устройство 3000 РФГ выпуска может работать от электродвигателя.
ЭМУ 100 принимает сигналы, обозначающие скорость вращения и угол поворота коленчатого вала для коленчатого вала 1090, получаемые от датчика 5000 угла поворота коленчатого вала. ЭМУ 100 также принимает сигнал, обозначающий фазу распределительного вала 1120 впуска, и сигнал, обозначающий фазу распределительного вала 1130 выпуска (положения этих распределительных валов в направлении вращения), от датчика 5010 положения кулачка. Другими словами, ЭМУ 100 принимает сигнал, обозначающий фазу впускного клапана 1100, и сигнал, обозначающий фазу выпускного клапана 1110, от датчика 5010 положения кулачка. Кроме того, ЭМУ 100 принимает сигнал, обозначающий скорость вращения распределительного вала 1120 впуска, и сигнал, обозначающий скорость вращения распределительного вала 1130 выпуска от датчика 5010 положения кулачка.
Кроме того, ЭМУ 100 принимает сигнал, обозначающий температуру охладителя двигателя 1000 (температуру охладителя) от датчика 5020 температуры охладителя, и сигнал, обозначающий количество воздуха, отбираемого в двигателе 1000 от измерителя 5030 потока воздуха.
Кроме того, ЭМУ 100 принимает сигнал, обозначающий скорость вращения выходного вала электродвигателя 2060, от датчика 5040 скорости вращения.
ЭМУ 100 управляет величиной открывания дроссельной заслонки, распределением зажигания, установкой момента впрыска топлива, количеством впрыска топлива, фазой впускного клапана 1100, фазой выпускного клапана 1110 и т.д. на основе сигналов, принимаемых от упомянутых выше датчиков, и в соответствии с картами и программами, сохраненными в запоминающем устройстве (не показано) таким образом, что в двигателе 1000 устанавливают требуемое рабочее состояние.
В соответствии с первым вариантом выполнения изобретения, ЭМУ 100 устанавливает фазу впускного клапана 1100 на основе карты, которая использует скорость NE двигателя и количество KL всасываемого воздуха, как параметры, как показано на фиг.5. Множество карт, используемых для установки фазы 1100 впускного клапана для множества значений температуры охладителя, сохраняют в запоминающем устройстве.
Устройство 2000 РФГ впуска будет более подробно описано ниже. Следует отметить, что устройство 3000 РФГ выпуска может иметь такую же конструкцию, как и устройство 2000 РФГ впуска, описанное ниже.
Как показано на фиг.6, устройство 2000 РФГ впуска включает в себя звездочку 2010, дисковый кулачок 2020, устройства 2030 соединители, направляющую пластину 2040, редуктор 2050 скорости и электродвигатель 2060.
Звездочка 2010 соединена с коленчатым валом 1090 через, например, цепь. Скорость вращения звездочки 2010 составляет половину скорости вращения коленчатого вала 1090. Распределительный вал 1120 впуска установлен таким образом, что распределительный вал 1120 впуска расположен коаксиально оси вращения звездочки 2010 и вращается относительно звездочки 2010. Таким образом, распределительный вал 1120 впуска установлен таким образом, что фаза распределительного вала 1120 впуска относительно коленчатого вала 1090 может изменяться.
Дисковый кулачок 2020 соединен с распределительным валом 1120 впуска с помощью первого штифта 2070. В звездочке 2010 дисковый кулачок 2020 вращается вместе с распределительный валом 1120 впуска. Дисковый кулачок 2020 и распределительный вал 1120 впуска могут быть сформированы как единая деталь друг с другом.
Каждое устройство 2030 соединителя сформировано из первого рычага 2031 и второго рычага 2032. Как показано на фиг.7, на которой представлен вид в поперечном сечении по линии VII-VII, обозначенной на фиг.6, пара первых рычагов 2031 расположена в звездочке 2010 симметрично относительно оси вращения распределительного вала 1120 впуска. Каждый первый рычаг 2031 соединен со звездочкой 2010 так, что он может поворачиваться вокруг второго штифта 2072.
Как показано на фиг.8, которая представляет вид в поперечном сечении по линии VIII-VIII, обозначенной на фиг.6, и на фиг.9, которая представляет состояние, достигаемое путем перемещения фазы клапана 1100 впуска, из состояния, показанного на фиг.8, первые рычаги 2031 и дисковый кулачок 2020 соединены друг с другом с помощью вторых рычагов 2032.
Каждый второй рычаг 2032 поддерживается так, что он может вращаться вокруг третьего штифта 2074, относительно первого рычага 2031. Каждый второй рычаг 2032 удерживается так, что он может вращаться вокруг четвертого штифта 2076, относительно дискового кулачка 2020.
Распределительный вал 1120 впуска вращается относительно звездочки 2010, с помощью пары устройств 2030 соединителей, в результате чего фаза впускного клапана 100 меняется. В соответствии с этим, даже если одно из устройств 2030 соединителей сломается или треснет, фаза впускного клапана 1100 будет изменяться с помощью другого устройства 2030 соединителя.
Рассмотрим снова фиг.6, на которой штифт 2034 управления установлен с одной стороны каждого устройства 2030 соединителя (более конкретно, второй рычаг 2032), причем эта сторона расположена проксимально к направляющей пластине 2040. Штифт 2034 управления установлен коаксиально с третьим штифтом 2074. Каждый штифт 2034 управления скользит в направляющей канавке 2042, сформированной в направляющей пластине 2040.
Каждый штифт 2034 управления движется в радиальном направлении, скользя в направляющей канавке 2042, сформированной в направляющей пластине 2040. Движение каждого штифта 2034 управления в радиальном направлении поворачивает распределительный вал 1120 впуска относительно звездочки 2010.
Как показано на фиг.10, на которой представлен вид в поперечном сечении по линии Х-Х, обозначенной на фиг.6, направляющая канавка 2042 сформирована спирально таким образом, что штифт 2034 управления движется в радиальном направлении в соответствии с величиной поворота направляющей пластины 2040. Однако форма направляющей канавки 2042 не ограничивается этим.
По мере того, как расстояние между штифтом 2034 управления и осью направляющей пластины 2040 увеличивается в радиальном направлении, фаза впускного клапана 1100 все больше задерживается. А именно, величина изменения фазы соответствует величине, на которую сработало каждое устройство 2030 соединителя в соответствии с движением штифта 2034 управления в радиальном направлении. Следует отметить, что по мере того, как расстояние между штифтом 2034 управления и осью направляющей пластины 2040 увеличивается в радиальном направлении, фаза впускного клапана 1100 может все больше сдвигаться вперед.
Как показано на фиг.10, когда штифт 2034 управления достигает конца направляющей канавки 2042, операция устройства 2030 соединителя ограничивается. В соответствии с этим, фаза, на которой штифт 2034 управления достигает конца направляющей канавки 2042, представляет собой механически определенную фазу с наибольшим опережением или механически определенную фазу с наибольшей задержкой впускного клапана 1100.
Рассмотрим снова фиг.6, на которой множество выемок 2044 сформированы на одной стороне направляющей пластины 2040, которая расположена проксимально к редуктору 2050 скорости. Выемки 2044 используются для соединения направляющей пластины 2040 и редуктора 2050 скорости друг с другом.
Редуктор 2050 сформирован из внешнего зубчатого колеса 2052 и внутреннего зубчатого колеса 2054. Внешнее зубчатое колесо 2052 зафиксировано на звездочке 2010 и вращается вместе со звездочкой 2010.
Множество выступов 2056, которые установлены в выемках 2044 направляющей пластины 2040, сформированы на внутреннем зубчатом колесе 2054. Внутреннее зубчатое колесо 2054 поддерживается так, что оно может вращаться вокруг эксцентричной оси 2066 соединения 2062, в котором ось отклоняется от оси 2064 выходного вала электродвигателя 2060.
На фиг.11 показан вид в поперечном сечении по линии XI-XI, обозначенной на фиг.6. Внутреннее зубчатое колесо 2054 установлено таким образом, что часть из множества его зубьев зацеплены с внешним зубчатым колесом 2052. Когда скорость вращения выходного вала электродвигателя 2060 равна скорости вращения звездочки 2010, соединение 2062 и внутреннее зубчатое колесо 2054 вращаются с той же скоростью вращения, что и внешнее зубчатое колесо 2052 (звездочка 2010). В этом случае, направляющая пластина 2040 вращается с той же скоростью вращения, что и звездочка 2010, и фаза впускного клапана 1100 поддерживается.
Когда соединение 2062 вращается вокруг оси 2064 относительно внешнего зубчатого колеса 2052 электродвигателя 2060, все внутреннее зубчатое колесо 2054 поворачивается вокруг оси 2064, и, одновременно, внутреннее зубчатое колесо 2054 вращается вокруг эксцентричной оси 2066. Скорость вращения внутреннего зубчатого колеса 2054 обеспечивает вращение направляющей пластины 2040 относительно звездочки 2010, в результате чего меняется фаза впускного клапана 1100.
Фаза впускного клапана 1100 меняется в результате уменьшения относительной скорости вращения (величины операции электродвигателя 2060) между выходным валом электродвигателя 2060 и звездочкой 2010, с использованием редуктора 2050 скорости, направляющей пластины 2040 и устройств 2030 соединителей. В качестве альтернативы, фаза впускного клапана 1100 может изменяться путем увеличения относительной скорости вращения между выходным валом электродвигателя 2060 и звездочкой 2010.
Как показано на фиг.12, отношение степени уменьшения скорости, которое реализуют элементы устройства 2000 РФГ впуска во взаимодействии, а именно, отношение относительной скорости вращения между выходным валом электродвигателя 2060 и звездочкой 2010 к величине изменения фазы впускного клапана 1100, может принимать значение, соответствующее фазе впускного клапана 1100. В соответствии с первым вариантом выполнения изобретения по мере того, как отношение степени замедления скорости повышается, величина изменения фазы относительно относительной скорости вращения между выходным валом электродвигателя 2060 и звездочкой 2010 уменьшается.
Когда фаза впускного клапана 1100 находится в пределах области задержки, которая продолжается от фазы с наибольшей задержкой до СА1, отношение замедления скорости, которое могут реализовать элементы устройство 2000 РФГ впуска во взаимодействии, составляет R1. Когда фаза впускного клапана 1100 в находится пределах области опережения фазы, которая продолжается от СА2 (СА2 представляет собой фазу, которая находится впереди фазы СА1) до фазы с наибольшим опережением, отношение замедления скорости, которое могут реализовать элементы устройства 2000 РФГ впуска во взаимодействии, составляет R2 (R1>R2).
Когда фаза впускного клапана 1100 находится в пределах промежуточной области, которая продолжается от СА1 до СА2, отношение замедления скорости, которое могут реализовать элементы устройства 2000 РФГ впуска во взаимодействии, изменяется в определенной степени ((R2-R1)/(СА2-СА1)).
Эффект устройства 2000 РФГ впуска устройства регулируемых фаз газораспределения описан ниже.
Когда фаза впускного клапана 1100 (распределительный вал 1120 впуска) установлена с опережением, электродвигатель 2060 работает так, что он вращает направляющую пластину 2040 относительно звездочки 2010. В результате, фаза впускного клапана 1100 устанавливается с опережением, как показано на фиг.13.
Когда фаза впускного клапана 1100 находится в пределах области задержки, которая продолжается от фазы с наибольшей степенью задержки до СА1, относительная скорость вращения между выходным валом электродвигателя 2060 и звездочкой 2010 уменьшена с отношением R1 замедления скорости. В результате, фаза впускного клапана 1100 устанавливается с опережением.
Когда фаза впускного клапана 1100 находится в пределах области опережения, которая продолжается от СА2 до фазы с наибольшей степенью опережения, относительная скорость вращения между выходным валом электродвигателя 2060 и звездочкой 2010 уменьшается с отношением R2 замедления скорости. В результате, фаза впускного клапана 1100 устанавливается с опережением.
Когда фаза впускного клапана 1100 задержана, выходной вал электродвигателя 2060 вращается относительно звездочки 2010 в направлении, противоположном направлению, в котором фаза впускного клапана 1100 устанавливается с опережением. Когда фаза устанавливается с задержкой, относительная скорость вращения между выходным валом электродвигателя 2060 и звездочкой 2010 уменьшается аналогично тому, когда фазу устанавливают с опережением. Когда фаза впускного клапана 1100 находится в пределах области задержки, которая продолжается от фазы с наибольшей задержкой до СА1, относительная скорость вращения между выходным валом электродвигателя 2060 и звездочкой 2010 уменьшается с отношением R1 замедления скорости. В результате, фаза устанавливается с задержкой. Когда фаза впускного клапана 1100 находится в пределах области опережения, которая продолжается от СА2 до фазы, установленной с наибольшим опережением, относительная скорость вращения между выходным валом электродвигателя 2060 и звездочкой 2010 уменьшается с заданным отношением R2 замедления скорости. В результате, фаза устанавливается с задержкой.
В соответствии с этим, до тех пор, пока направление относительного вращения между выходным валом электродвигателя 2060 и звездочкой 2010 остается неизменным, фаза впускного клапана 1100 может быть установлена с опережением или задержкой, как в области задержки, которая продолжается от фазы, установленной с наибольшей задержкой до СА1, так и в области опережения, которая продолжается от СА2 до фазы с наибольшим опережением. В этом случае, в области опережения, которая продолжается от СА2 до фазы с наибольшим опережением, фазу устанавливают с опережением или с задержкой на величину, большую, чем в области задержки, которая продолжается от фазы с наибольшей задержкой до СА1. В соответствии с этим область опережения установлена шире по ширине изменения фазы, чем область задержки.
В области задержки, которая продолжается от фазы с наибольшей задержкой до СА1, отношение уменьшение скорости велико. В соответствии с этим требуется большой крутящий момент для вращения выходного вала электродвигателя 2060, используя крутящий момент, прикладываемый к распределительному валу 1120 впуска, в соответствии с работой двигателя 1000. Поэтому, даже когда электродвигатель 2060 не производит крутящий момент, например, даже когда электродвигатель 2060 остановлен, вращение выходного вала электродвигателя 2060, которое вызвано крутящим моментом, приложенным к распределительному валу 1120 впуска, ограничено. Это ограничивает отклонение фактической фазы от фазы, используемой при управлении.
Когда фаза впускного клапана 1100 находится в пределах промежуточной области, которая продолжается от СА1 до СА2, относительная скорость вращения между выходным валом электродвигателя 2060 и звездочкой 2010 уменьшена с отношением замедления скорости, которое изменяется в заданной степени. В результате, фаза впускного клапана 1100 устанавливается с опережением или задержкой.
Когда фаза впускного клапана 1100 сдвигается из области задержки в область опережения, или из области опережения в область задержки, величина изменения фазы относительно относительной скорости вращения между выходным валом электродвигателя 2060 и звездочкой 2010, постепенно увеличивается или уменьшается. В соответствии с этим ограничивается резкое ступенчатое изменение величины изменения фазы для ограничения резкого изменения фазы. В результате управление фазой впускного клапана 1100 осуществляется более соответствующим образом.
Рассмотрим снова фиг.6, на которой управление режимом работы выполняют над электродвигателем 2060 с помощью ЭМУ 100 через электронный модуль привода (ЭМП) 4000. При выполнении управления режимом работы устанавливают коэффициент заполнения, который представляет собой отношение между длительностью, при которой элемент переключателя (не показан) ЭМП 4000 включен, и длительностью, при которой элемент переключателя выключен, и рабочим напряжением электродвигателя 2060 управляют, управляя работой элемента переключателя при данном коэффициенте заполнения.
Таким образом, рабочее напряжение электродвигателя 2060 представляет собой напряжение, которое соответствует коэффициенту заполнения. Когда коэффициент заполнения увеличивается, рабочее напряжение также увеличивается. Когда рабочее напряжение увеличивается, крутящий момент, генерируемый электродвигателем 2060, увеличивается. Кроме того, когда увеличивается рабочий ток, электродвигатель 2060 генерирует больший крутящий момент.
Сигнал, обозначающий коэффициент заполнения, установленный ЭМУ 100, передают в ЭМП 4000. ЭМП 4000 выводит напряжение, которое соответствует коэффициенту заполнения. Таким образом, выполняют привод электродвигателя 2060.
Вместо установки коэффициента заполнения рабочее напряжение или рабочий ток электродвигателя 2060 может быть установлен непосредственно. В этом случае электродвигателем 2060 можно управлять при установленном рабочем напряжении или при установленном рабочем токе.
Скорость вращения электродвигателя 2060 представляет собой скорость вращения, которая соответствует крутящему моменту, генерируемому электродвигателем 2060. Скорость вращения электродвигателя 2060 определяют с помощью датчика 5040 скорости вращения, и сигнал, обозначающий определяемую скорость вращения, передают в ЭМУ 100.
Коэффициент заполнения рассчитывают путем суммирования вместе основного коэффициента заполнения и коэффициента заполнения коррекции. Основной коэффициент заполнения и коэффициент заполнения коррекции установлены на основе, например, целевой фазы впускного клапана 1100, которая установлена с использованием карты, показанной на фиг.5, и скорости вращения и фазы распределительного вала 1120 впуска (фаза впускного клапана 1100), которые определяют, используя датчик 5010 положения кулачка.
Более конкретно, требуемое значение разности скорости вращения (относительной скорости вращения) между выходным валом электродвигателя 2060 и звездочкой 2010 (ниже называется "требуемая разность скорости вращения", в соответствующих случаях) рассчитывают на основе разности ΔСА между целевой фазой и детектируемой фазой. Требуемую разность скорости вращения рассчитывают, используя карту, которая подготовлена заранее, используя, например, разность ΔСА, как параметр. Следует отметить, что, способ расчета требуемой разности скорости вращения не ограничивается этим.
Кроме того, требуемое значение скорости вращения выходного вала электродвигателя 2060 (ниже называется “требуемой скоростью вращения”, в соответствующих случаях) рассчитывают путем суммирования вместе требуемой разности скорости вращения и скорости вращения распределительного вала 1120 впуска.
Основной коэффициент заполнения электродвигателя 2060 рассчитывают на основе требуемой скорости вращения. Основной коэффициент заполнения рассчитывают так, чтобы значение увеличивалось при увеличении требуемой скорости вращения. Основной коэффициент заполнения рассчитывают, применяя карту, которая подготовлена заранее, используя, например, требуемую скорость вращения, как параметр. Следует отметить, что способ расчета основного коэффициента заполнения не ограничивается этим.
Коэффициент заполнения коррекции рассчитывают на основе разности ΔN скорости вращения между скоростью вращения выходного вала электродвигателя 2060, которую определяют с помощью датчика 5040 скорости вращения, и требуемой скоростью вращения. Коэффициент заполнения коррекции рассчитывают, как значение, получаемое путем умножения разности ΔN скорости вращения на коэффициент К коррекции. Следует отметить, что способ расчета коэффициента заполнения коррекции не ограничивается этим.
Функция ЭМУ 100 в соответствии с первым вариантом выполнения настоящего изобретения будет описана со ссылкой на фиг.14. Функция ЭМУ 100, которая будет описана ниже, может быть воплощена либо с использованием аппаратных средств, или программных средств.
ЭМУ 100 включает в себя первый модуль 110 управления фазой, второй модуль 120 управления фазой, третий модуль 130 управления фазой и модуль 140 изучения. Первый модуль 110 управления фазой управляет устройством 2000 РФГ впуска (электродвигателем 2060) таким образом, что, когда работает двигатель 1000 (выполняют впрыск топлива и зажигание, в результате чего двигатель 1000 генерирует крутящий момент), фазу впускного клапана 1100 изменяют в пределах второго диапазона, который включен в первый диапазон, который продолжается от фазы с наибольшей задержкой до фазы с наибольшим опережением, как показано на фиг.15. Второй диапазон не включает в себя фазу с наибольшей задержкой.
В первом варианте выполнения изобретения третий диапазон, который включает в себя фазу с наибольшей задержкой, используют только, когда выполняют запуск двигателя 100. Это связано с тем, что фазу с наибольшей задержкой устанавливают так, чтобы фаза впускного клапана 1100 была установлена с задержкой на большую величину, для уменьшения вибрации, которая, вероятно, возникает при запуске двигателя 1000, из-за уменьшения коэффициента сжатия.
Второй модуль 120 управления фазой управляет устройством 2000 РФГ впуска таким образом, что фазу впускного клапана 1100 переводят в механически определенную фазу с наибольшей задержкой, когда выполняют управление отсечкой подачи топлива для впрыска топлива в двигатель 1000. Например, фазу впускного клапана 1100 переводят в значение фазы с наибольшей задержкой путем задержки фазы впускного клапана 1100 при постоянном коэффициенте заполнения до тех пор, пока величина изменения фазы, которую детектирую с помощью датчика 5010 положения кулачка, не станет равной "0". Следует отметить, что способ перевода фазы впускного клапана 1100 в значение фазы с наибольшей задержкой не ограничивается этим.
Третий модуль 130 управления фазой управляет устройством 2000 РФГ впуска таким образом, что фазу впускного клапана 1100 переводят в механически определенную фазу с наибольшей задержкой, когда гибридное транспортное средство движется во втором режиме, в котором двигатель 1000 остановлен, и гибридное транспортное средство движется только за счет мощности привода, генерируемой вторым ЭДГ 400.
Модуль изучения 140 изучает значение, выводимое датчиком 5010 положения кулачка, то есть фазу, определяемую датчиком 5010 положения кулачка, в состоянии, в котором устройством 2000 РФГ впуска управляют так, что фазу впускного клапана 1100 переводят в фазу с наибольшей задержкой.
Таким образом, модуль изучения 140 изучает фазу, которую определяют с помощью датчика 5010 положения кулачка, как фазу с наибольшей задержкой, когда выполняют управление отсечки подачи топлива или, когда гибридное транспортное средство движется, с использованием только мощности привода, генерируемой вторым ЭДГ 400. Например, исходное значение, которое сохранено как фаза с наибольшей задержкой, заменяют фазой, детектируемой датчиком 5010 положения кулачка. Модуль изучения 140 может изучать отклонение детектируемой фазы от исходного значения. Следует отметить, что способ изучения фазы впускного клапана 1100 не ограничивается этим.
Процедура управления программой, выполняемая ЭМУ 100, который представляет собой модуль управления в соответствии с первым вариантом выполнения изобретения, будет описана со ссылкой на фиг.16. Программу, описанную ниже, периодически выполняют через заданные интервалы времени.
На этапе (ниже обозначается "S") 100, ЭМУ 100 определяет, работает ли двигатель 1000. Если определяют, что двигатель 1000 работает ("ДА" на S100), выполняют S102. С другой стороны, если определяют, что двигатель 1000 остановлен ("НЕТ" в S100), выполняют S110.
На S102 ЭМУ 100 управляет устройством 2000 РФГ впуска таким образом, что фазы изменяются во втором диапазоне, который не включает в себя фазу с наибольшей задержкой.
На S110 ЭМУ 100 определяет, следует ли выполнить управление отсечкой подачи топлива. Если определяют, что следует выполнить управление отсечкой подачи топлива ("ДА" на S110), выполняют S114. С другой стороны, если определяют, что управление отсечкой подачи топлива не требуется выполнить ("НЕТ" на S110), выполняют S112.
На S112 ЭМУ 100 определяет, движется ли гибридное транспортное средство во втором режиме, в котором двигатель 1000 остановлен, и гибридное транспортное средство движется с использованием только мощности привода, генерируемой вторым ЭДГ 400. Если определяют, что гибридное транспортное средство должно двигаться во втором режиме ("ДА" на S112), выполняют S114. С другой стороны, если определяют, что гибридное транспортное средство не должно двигаться во втором режиме ("НЕТ" на S112), процедура управления заканчивается.
На S114 ЭМУ 100 управляет устройством 2000 РФГ впуска таким образом, что фазу впускного клапана 1100 переводят в механически определенную фазу с наибольшей задержкой. На этапе S116 ЭМУ 100 изучает фазу, определяемую с помощью датчика 5010 положения кулачка, как фазу с наибольшей задержкой.
ЭМУ 100 имеет описанную выше структуру и выполняет процедуру управления, описанную выше в блок-схеме последовательности операций. Работа ЭМУ 100, который представляет собой модуль управления, в соответствии с первым вариантом выполнения изобретения, будет описана ниже.
Фазу с наибольшей задержкой устанавливают так, чтобы фаза впускного клапана 1100 была задержана на большую величину, для уменьшения вибрации, которая, вероятно, возникает при запуске двигателя 1000, благодаря уменьшению степени сжатия. В соответствии с этим, если фаза впускного клапана 1100 будет переведена в фазу с наибольшей задержкой, при работе двигателя 1000 фаза будет задержана в большей степени, чем необходимо. В этом случае, например, может ухудшиться выброс выхлопных газов. Кроме того, может произойти удар из-за уменьшения выходной мощности привода двигателя 1000.
Поэтому, если определяют, что двигатель 1000 работает ("ДА" на S100), устройством 2000 РФГ впуска управляют так, что фаза впускного клапана 1100 меняется в пределах второго диапазона, который не включает в себя фазу с наибольшей задержкой (S102).
С другой стороны, если определяют, что следует выполнить управление с отсечкой подачи топлива ("ДА" на S110), или, если определяют, что гибридное транспортное средство должно двигаться во втором режиме, в котором двигатель 1000, остановлен, и гибридное транспортное средство движется с использованием только мощности привода, генерируемой вторым ЭДГ 400 ("ДА" на S112), то есть, когда двигатель 1000 остановлен, сгорание топлива не происходит в двигателе 1000. В этих случаях, даже если фаза впускного клапана 1100 будет переведена в фазу с наибольшей задержкой, не ухудшается выброс выхлопных газов, или не произойдет удар.
Поэтому устройством 2000 РФГ впуска управляют таким образом, что фазу впускного клапана 1100 переводят в механически определенную фазу с наибольшей задержкой (S114). Фазу, которую определяют с помощью датчика 5010 положения кулачка в этом состоянии, определяют как фазу с наибольшей задержкой (S116). Таким образом, становится возможным получить фазу с наибольшей задержкой без возникновения удара или ухудшения выброса выхлопных газов.
Как описано выше, с помощью ЭМУ, который представляет собой модуль управления, в соответствии с первым вариантом выполнения изобретения, когда двигатель работает, устройством РФГ впуска управляют таким образом, что фаза впускного клапана изменяется в пределах второго диапазона, который не включает в себя фазу с наибольшей задержкой. С другой стороны, когда двигатель остановлен, устройством РФГ впуска управляют так, что фазу переводят в фазу с наибольшей задержкой. Определяют фазу, определяемую с помощью датчика положения кулачка в этом состоянии. Таким образом, становится возможным определить фазу с наибольшей задержкой, без возникновения удара или ухудшения выброса выхлопных газов.
Следует отметить, что может быть определена фаза, которую определяют с помощью датчика положения кулачка, при механически определенной фазе с наибольшей задержкой.
Функция ЭМУ 100 в соответствии со вторым вариантом воплощения изобретения будет описана со ссылкой на фиг.17. Функция ЭМУ 100, которая будет описана ниже, может быть воплощена либо с использованием аппаратных средств, или программных средств.
ЭМУ 100 включает в себя модуль 140 изучения, модуль 150 круиз-контроля, первый модуль 160 управления ЭДГ, первый модуль 110 управления фазой, второй модуль 120 управления фазой и третий модуль 130 управления фазой.
Модуль 140 изучения изучает величину, выводимую датчиком 5010 положения кулачка, то есть фазу впускного клапана 1100, определяемую с помощью датчика 5010 положения кулачка, в состоянии, в котором устройством 2000 РФГ впуска управляют так, что фазу впускного клапана 1100 переводят в механически определенную фазу с наибольшей задержкой.
Например, исходное значение, которое сохраняют как фазу с наибольшей задержкой, заменяют фазой, детектируемой датчиком 5010 положения кулачка. Модуль 140 изучения может изучить отклонение детектируемой фазы исходного значения. Следует отметить, что способ изучения фазу впускного клапана 1100 не ограничивается этим.
Данные, которые обозначают определенную фазу, записывают в статическое оперативное запоминающее устройство (СОЗУ) 104 ЭМУ 100, показанное на фиг.1. В то время как электроэнергию подают в СОЗУ 104, данные, которые обозначают определенное значение фазы поддерживаются. Поэтому, если батарея 106, которая представляет собой источник энергии для ЭМУ 100, будет удалена или заменена на новую, данные, которые обозначают полученное значение фазы, будут удалены.
Рассмотрим снова фиг.17, на которой, если данные, которые обозначают фазу, определенную с помощью модуля 140 изучения, будут удалены, модуль 150 круиз-контроля выполняет такое управление, что гибридное транспортное средство движется во втором режиме, в котором двигатель 1000 остановлен, и гибридное транспортное средство движется, используя только мощность привода, генерируемую вторым ЭДГ 400. Состояние, в котором работает двигатель 1000, означает состояние, в котором осуществляют впрыск топлива и зажигание, и поэтому двигатель 1000 генерирует крутящий момент.
Когда гибридное транспортное средство движется во втором режиме, поскольку данные, которые обозначают определенное значение фазы, удалены, первый модуль 160 управления ЭДГ управляет первым ЭДГ 200 таким образом, что коленчатый вал 190 вращается с помощью мощности привода, генерируемой первым ЭДГ 200. Вращение коленчатого вала 1090 приводит к вращению распределительного вала 1120 впуска и распределительного вала 1130 выпуска.
Во время работы двигателя 1000 первый модуль 110 управления фазой управляет устройством 2000 РФГ впуска (электродвигателем 2060) таким образом, что фаза впускного клапана 1100 меняется в пределах второго диапазона, который включен в первый диапазон, который продолжается от фазы с наибольшей задержкой до фазы с наибольшим опережением, как показано на фиг.15. Второй диапазон не включает в себя фазу с наибольшей задержкой.
Во втором варианте выполнения изобретения третий диапазон, который включен в первый диапазон, и который включает в себя фазу с наибольшей задержкой, используют только при запуске двигателя 1000. Это связано с тем, что фаза с наибольшей задержкой установлена таким образом, что фаза впускного клапана 1100 будет задержана на большую величину, для уменьшения вибрации, которая, вероятно, возникает при запуске двигателя 1000, благодаря уменьшению степени сжатия. Поэтому, например, когда двигатель 1000 останавливают, устройством 2000 РФГ впуска управляют так, что фазу переводят в фазу с наибольшей задержкой.
Второй модуль 120 управления фазой управляет устройством 2000 РФГ впуска, таким образом, что фазу впускного клапана 1100 переводят в механически определенную фазу с наибольшей задержкой, когда первым ЭДГ 200 управляют так, что коленчатый вал 1090 вращается, а именно, распределительный валы 1120 и 1130 вращаются, в то время как гибридное транспортное средство движется во втором режиме. Например, фазу впускного клапана 1100 переводят в фазу с наибольшей задержкой путем задержки фазы впускного клапана 1100 при постоянном коэффициенте заполнения до тех пор, пока величина изменения фазы, детектируемой датчиком 5010 положения кулачка, не станет равной "0". Следует отметить, что способ перевода фазы 1100 впускного клапана в фазу с наибольшей задержкой не ограничивается этим.
Когда удовлетворяется условие изучения фазы, третий модуль 130 управления фазой управляет устройством 2000 РФГ впуска таким образом, что фаза впускного клапана 1100 будет переведена в механически определенную фазу с наибольшей задержкой. Условие изучения фаза представляет собой, например, условие, при котором выполняют управление отсечкой подачи топлива для прекращения подачи топлива. Следует отметить, что условие изучения фазы не ограничивается этим.
Процедура управления программой, выполняемой ЭМУ 100, который представляет собой модуль управления, в соответствии со вторым вариантом выполнения изобретения, будет описана со ссылкой на фиг.18. Программа, описанная ниже, периодически выполняется через заданные интервалы времени.
На этапе (ниже обозначен "S") 200, ЭМУ 100 определяет, удовлетворяется ли условие изучения фазы. Если определяют, что условие изучения фазы удовлетворяется ("ДА" на S200), выполняют S210. Если определяют, что условие изучения фазы не удовлетворяется ("НЕТ" на S200), выполняют S220.
На этапе S210 ЭМУ 100 управляет устройством 2000 РФГ впуска так, что фазу впускного клапана 1100 переводят в механически определенную фазу с наибольшей задержкой. На S212 ЭМУ 100 изучает фазу, определяемую датчиком 5010 положения кулачка, как фазу с наибольшей задержкой.
На этапе S220 ЭМУ 100 определяет, были ли удалены данные, которые обозначают фазу, определенную, когда устройством 2000 РФГ впуска управляли так, что фазу впускного клапана 1100 переводят в механически определенную фазу с наибольшей задержкой. Поскольку известную технологию можно использовать для подготовки способа определения, удалены ли данные, его подробное описание не будет приведено ниже.
Если определяют, что данные, которые обозначают, что определенная фаза была удалена ("ДА" на S220), выполняют этап S222. С другой стороны, если определяют, что данные, которые обозначают, что определенная фаза не была удалена ("НЕТ" на S220), выполняют этап S230.
На этапе S222 ЭМУ 100 выполняет управление таким образом, что гибридное транспортное средство движется во втором режиме, в котором двигатель 1000 остановлен, и гибридное транспортное средство движется, используя только мощность привода, генерируемую вторым ЭДГ 400.
На этапе S224 ЭМУ 100 управляет первым ЭДГ 200 так, что коленчатый вал 1090 вращается с использованием мощности привода, генерируемой первым ЭДГ 200, то есть распределительные валы 1120 и 1130 вращаются с использованием мощности привода, генерируемой первым ЭДГ 200. После окончания этапа S224 выполняют этап S210.
На этапе S230 ЭМУ 100 определяет, работает ли двигатель 1000. Если определяют, что двигатель 1000 работает ("ДА" на S230), выполняют этап S232. С другой стороны, если определяют, что двигатель 1000 остановлен ("НЕТ" на этапе S230), процедура заканчивается. На этапе S232 ЭМУ 100 управляет устройством 2000 РФГ впуска так, что фаза впускного клапана 1100 изменяется во втором диапазоне, который не включает в себя фазу с наибольшей задержкой.
ЭМУ 100 имеет описанную выше конструкцию и выполняет описанную выше процедуру управления в соответствии с блок-схемой последовательности операций. Работа ЭМУ 100, который представляет собой модуль управления, в соответствии со вторым вариантом выполнения изобретения, будет описана ниже.
Когда условие изучения фазы удовлетворяется ("ДА" на этапе S200), устройством 2000 РФГ впуска управляют так, что фазу впускного клапана 1100 переводят в механически определенную фазу с наибольшей задержкой (S210). Фазу, которая определена датчиком 5010 положения кулачка в этом состоянии, определяют как фазу с наибольшей задержкой (S212).
Если данные, которые обозначают, что определенная фаза была удалена из СОЗУ 104, поскольку батарея 106 удалена или заменена на новую, точность фазы впускного клапана 1100, которым управляют с помощью ЭМУ 100, может ухудшиться. Если двигатель 1000 работает в этом состоянии, фактическая фаза может отклоняться от целевого значения фазы, которую используют при управлении. Поэтому выходная мощность двигателя 1000 может уменьшиться, или выброс выхлопных газов может ухудшиться.
Поэтому, если данные, которые обозначают, что определенная фаза была удалена ("ДА" на этапе S220), управление выполняют так, что гибридное транспортное средство движется во втором режиме, в котором двигатель 1000 остановлен, и гибридное транспортное средство движется, используя только мощность привода, генерируемую вторым ЭДГ 400 (S222).
Кроме того, первым ЭДГ 200 управляют так, что коленчатый вал 1090 вращается с помощью мощности привода, генерируемой первым ЭДГ 200, то есть распределительные валы 1120 и 1130 вращаются с использованием мощности привода, генерируемой первым ЭДГ 200 (S224). Таким образом, становится возможным уменьшить сопротивление распределительного вала 1120 впуска, которое генерируется при изменении фазы, при вращении распределительного вала 1120 впуска относительно звездочки 2010.
Поэтому устройством 2000 РФГ впуска управляют так, что фаза впускного клапана 1100 переводится в механически определенную фазу с наибольшей задержкой (S210). Таким образом, фаза впускного клапана 1100 будет надежно переведена на фазу с наибольшей задержкой. Фазу, которая определена датчиком 5010 положения кулачка в это время, определяют как фазу с наибольшей задержкой (S212). Поэтому становится возможным точно определить фазу впускного клапана 1100 во время движения гибридного транспортного средства.
Фазу с наибольшей задержкой устанавливают так, чтобы фаза впускного клапана 1100 была задержана на большую величину для уменьшения вибрации, которая, вероятно, возникает при запуске двигателе 1000, благодаря уменьшению степени сжатия. В соответствии с этим, если фаза впускного клапана 1100 будет переведена на фазу с наибольшей задержкой, когда работает двигатель 1000, фаза будет задержана в большей степени, чем необходимо. В этом случае, например, может ухудшиться выброс выхлопных газов. Кроме того, может произойти удар из-за уменьшения выходной мощности привода двигателя 1000.
Поэтому, если определяют, что данные, которые обозначают, что определенная фаза не была удалена из СОЗУ 104 ("НЕТ" на этапе S220), и определяют, что двигатель 1000 работает ("ДА" на этапе S230), устройством 2000 РФГ впуска управляют так, что фаза впускного клапана 1100 изменяется в пределах второго диапазона, который не включает в себя фазу с наибольшей задержкой (S232). Таким образом, становится возможным исключить ситуации, в которых фаза будет задержана в большей степени, чем необходимо, при работе двигателя 1000.
С помощью" ЭМУ, который представляет собой модуль управления, в соответствии со вторым вариантом выполнения изобретения, управление выполняют так, что гибридное транспортное средство движется во втором режиме, в котором двигатель остановлен, и гибридное транспортное средство движется, используя только мощность, генерируемую вторым ЭДГ. Первым ЭДГ управляют так, что распределительный вал вращается, благодаря мощности привода, генерируемой первым ЭДГ, когда гибридное транспортное средство движется во втором режиме. Таким образом, сопротивление вращению распределительного вала, которое генерируется, когда изменяется фаза, уменьшается более эффективно, чем в случае остановки распределительного вала. Устройством РФГ впуска управляют так, что фазу впускного клапана 1100 переводят на фазу с наибольшей задержкой, когда первым ЭДГ управляют так, что распределительный вал вращается. Поэтому можно надежно изменять фазу впускного клапана 1100, устанавливая ее в фазу с наибольшей задержкой. Определяют фазу, которую определяют с помощью датчика положения кулачка, когда устройством РФГ впуска управляют так, что фазу впускного клапана 1100 переводят в механически определенную фазу с наибольшей задержкой. В результате, можно точно определить фазу. впускного клапана 1100 во время движения гибридного транспортного средства.
Может быть определена фаза, которую определяют с помощью датчика положения кулачка в механически определенной фазе с наибольшей задержкой. Следует отметить, что может быть определена фаза выпускного клапана 1110.
Варианты выполнения изобретения, которые были описаны в описании, следует рассматривать во всех аспектах, как иллюстративные, а не как ограничивающие. Поэтому предполагается, что технический объем изобретения определен в формуле изобретения, и все изменения, которые попадают в пределы значения и в диапазон эквивалентности формулы изобретения, должны быть охвачены ею.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬ УПРАВЛЕНИЯ (ВАРИАНТЫ) И СПОСОБ УПРАВЛЕНИЯ (ВАРИАНТЫ) ДЛЯ МЕХАНИЗМА РЕГУЛИРУЕМЫХ ФАЗ ГАЗОРАСПРЕДЕЛЕНИЯ | 2008 |
|
RU2432479C2 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ФАЗ ГАЗОРАСПРЕДЕЛЕНИЯ | 2006 |
|
RU2390637C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ФАЗАМИ ГАЗОРАСПРЕДЕЛЕНИЯ ДВИГАТЕЛЯ | 2012 |
|
RU2567478C2 |
| ОРГАНЫ ГАЗОРАСПРЕДЕЛЕНИЯ ДИЗЕЛЕЙ (ВАРИАНТЫ) | 2003 |
|
RU2285133C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ УСТРОЙСТВА ИЗМЕНЕНИЯ ФАЗ ГАЗОРАСПРЕДЕЛЕНИЯ | 2015 |
|
RU2712495C2 |
| САМОАДАПТИВНАЯ ГИДРАВЛИЧЕСКАЯ СИСТЕМА С ИЗМЕНЯЕМЫМИ ФАЗАМИ ГАЗОРАСПРЕДЕЛЕНИЯ ДЛЯ ДИЗЕЛЬНОГО ДВИГАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ | 2010 |
|
RU2505683C2 |
| СПОСОБ И СИСТЕМА ДЛЯ РЕГУЛИРОВКИ ФАЗ ГАЗОРАСПРЕДЕЛЕНИЯ ВЫПУСКНЫХ КЛАПАНОВ | 2017 |
|
RU2704909C2 |
| МЕХАНИЗМ ИЗМЕНЕНИЯ ФАЗ ГАЗОРАСПРЕДЕЛЕНИЯ | 2002 |
|
RU2284419C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2008 |
|
RU2429362C2 |
| МЕХАНИЗМ ИЗМЕНЕНИЯ ФАЗ ГАЗОРАСПРЕДЕЛЕНИЯ | 2002 |
|
RU2208173C1 |
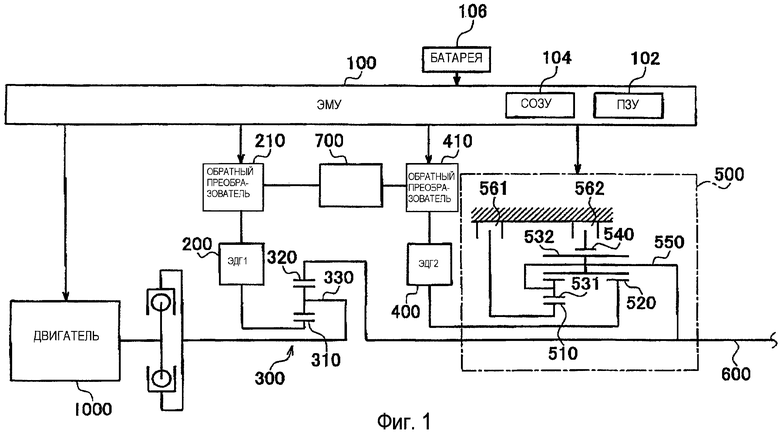
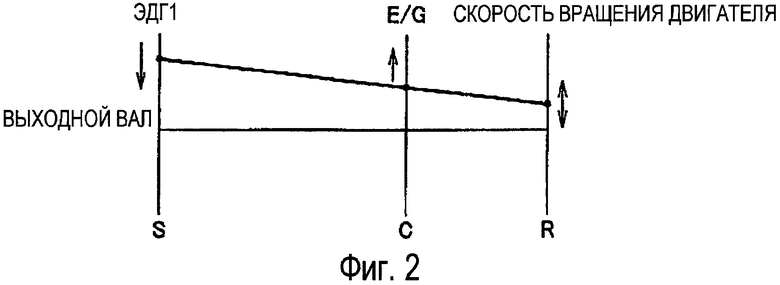
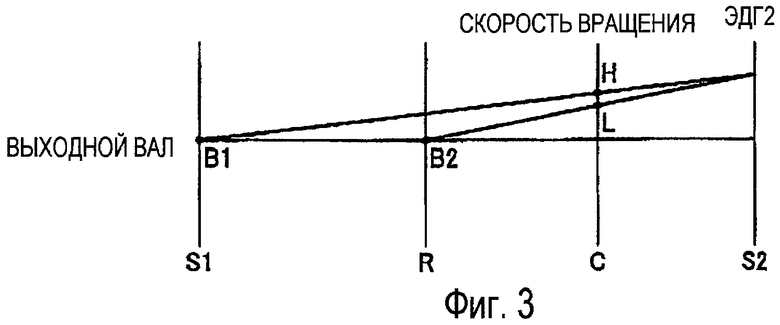
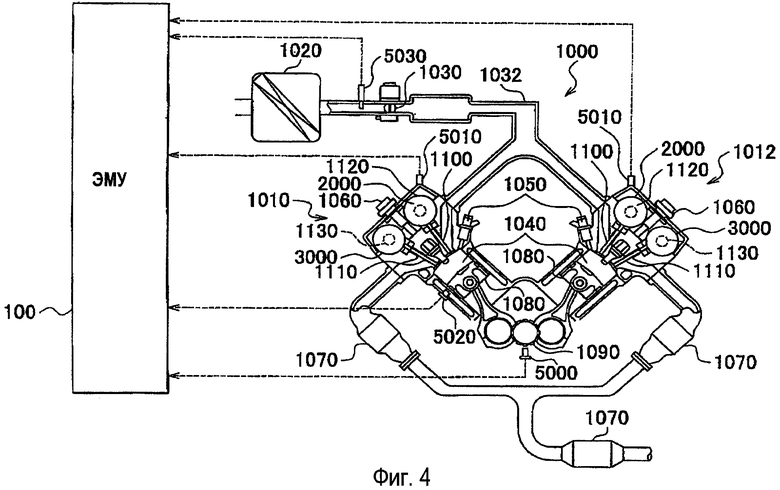
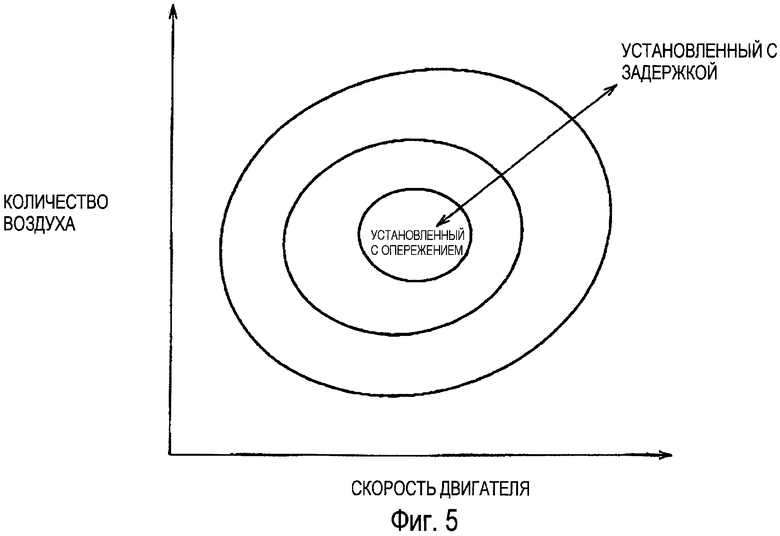
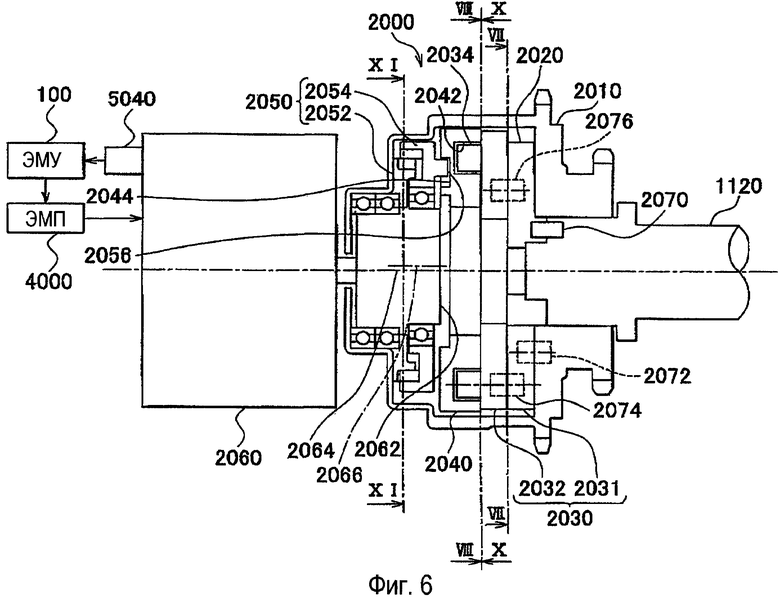
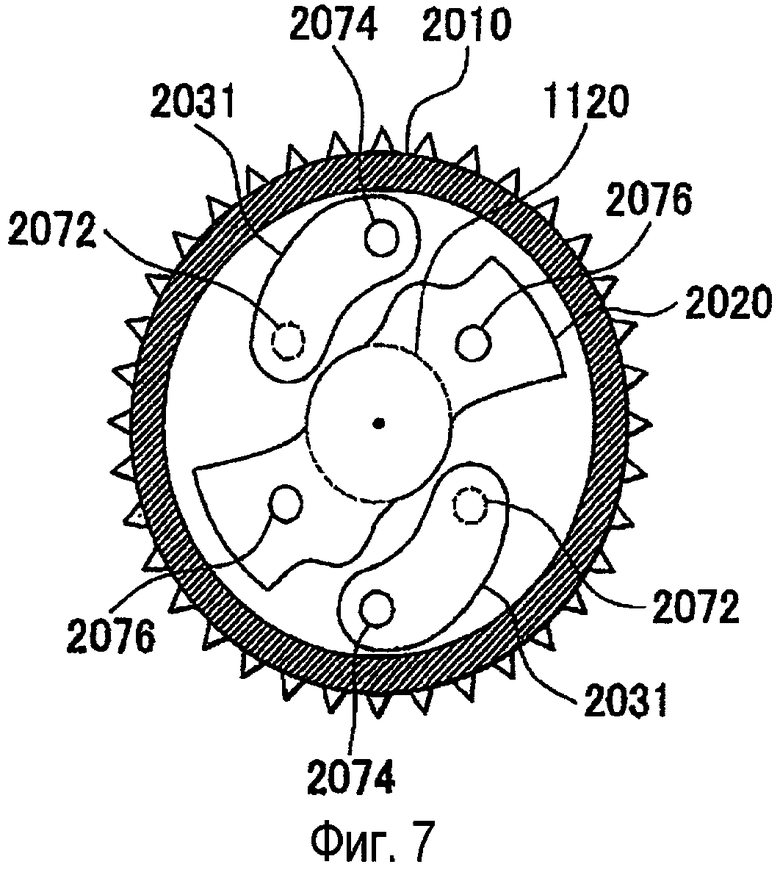
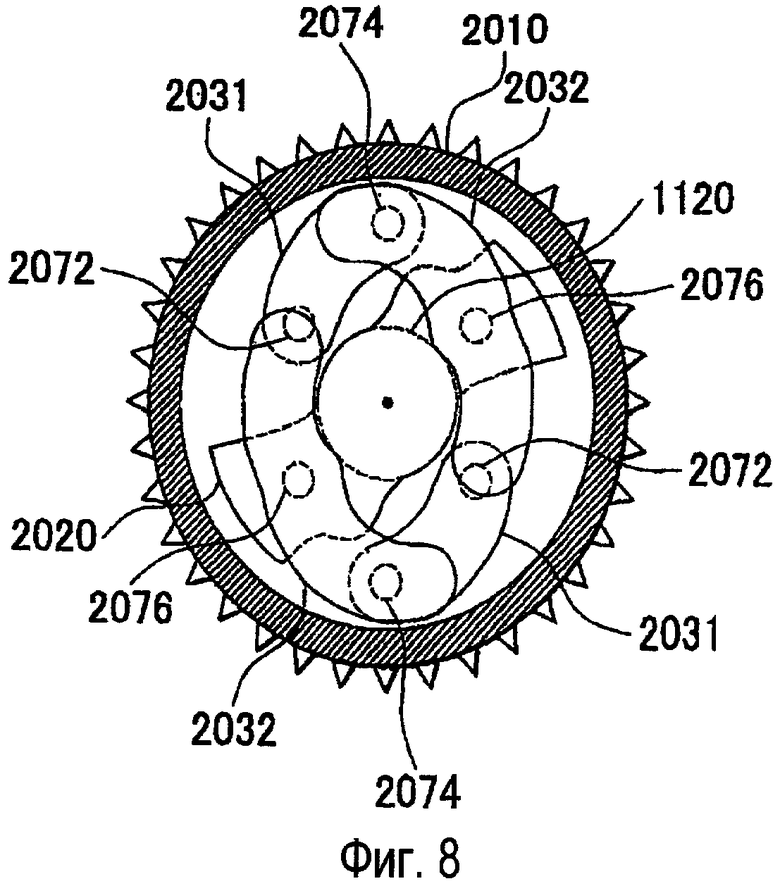
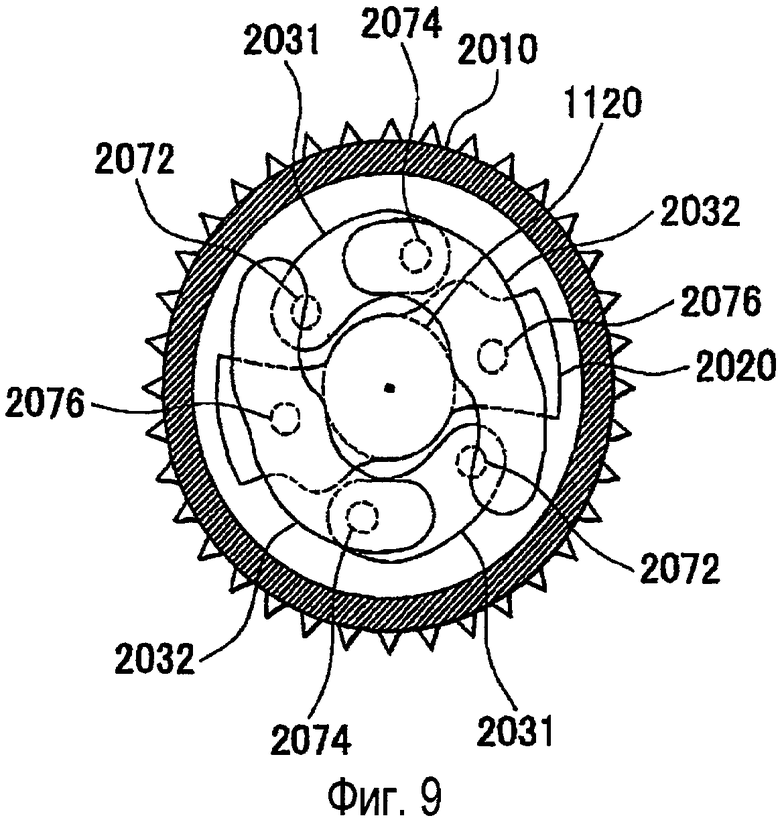
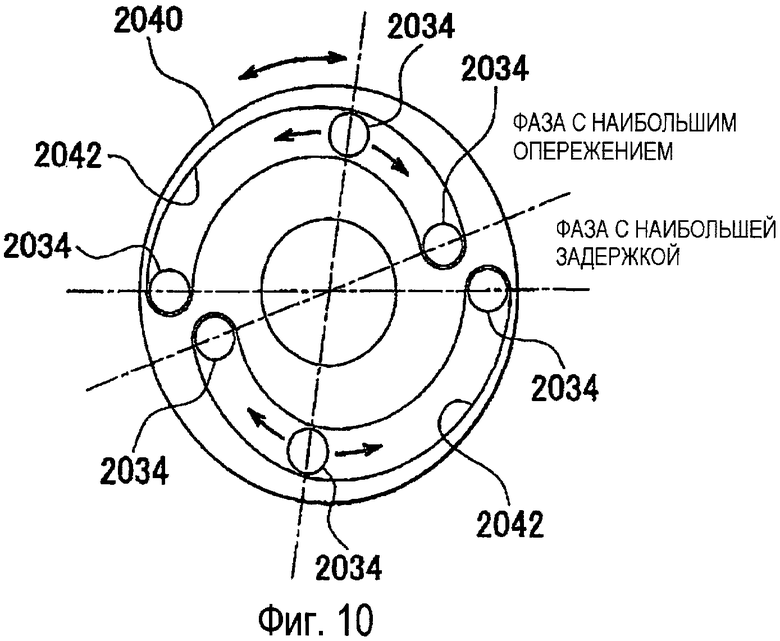
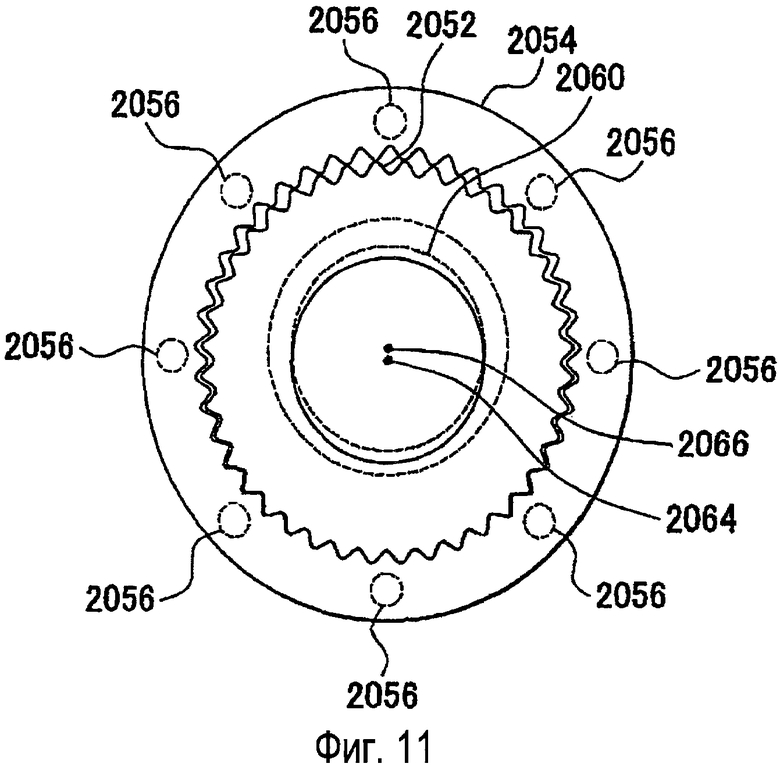
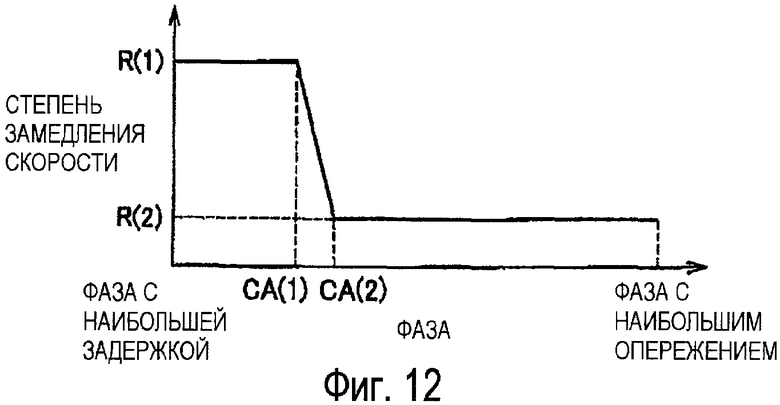
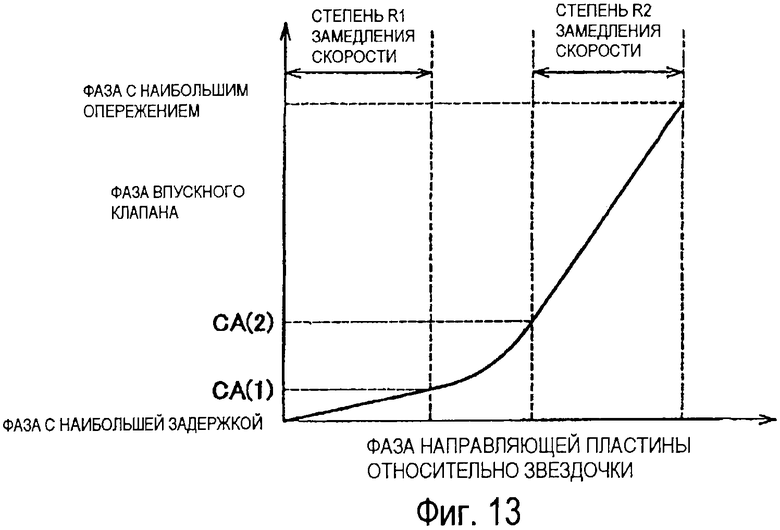
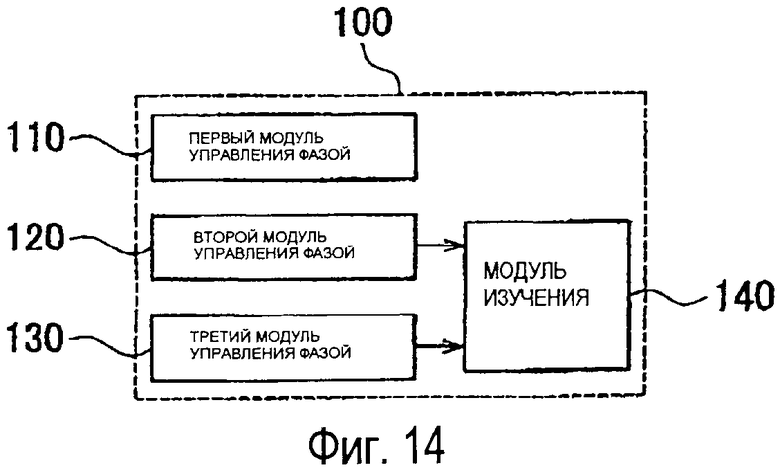
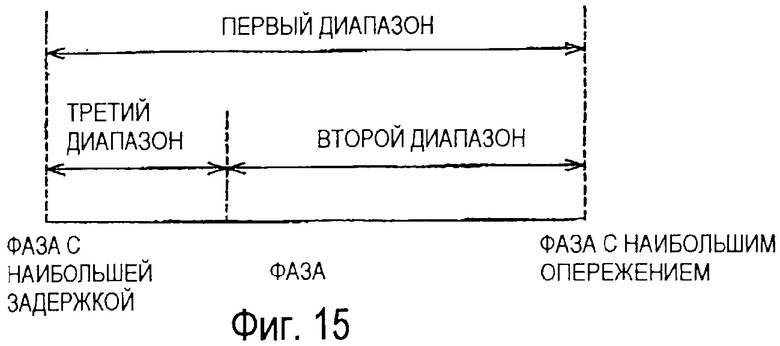
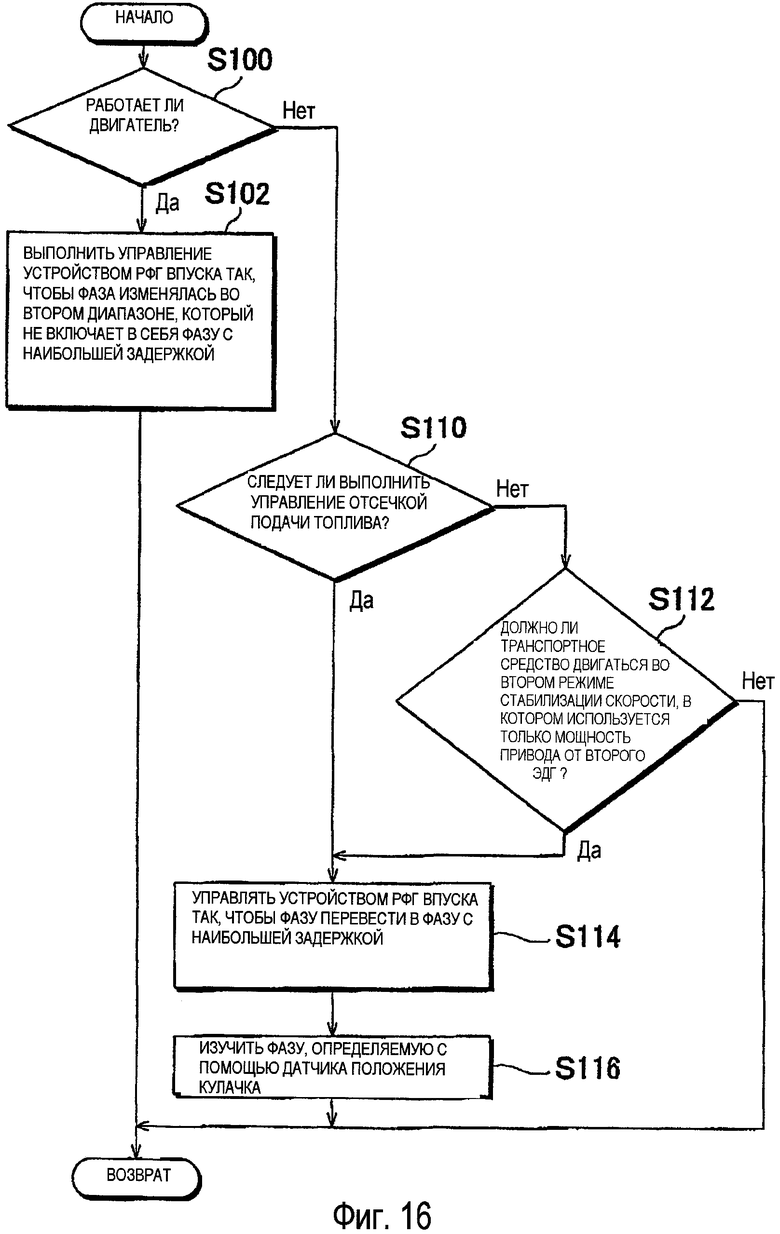
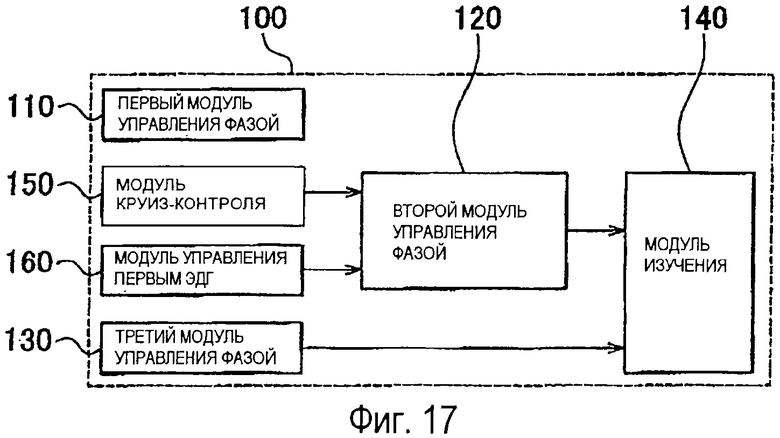
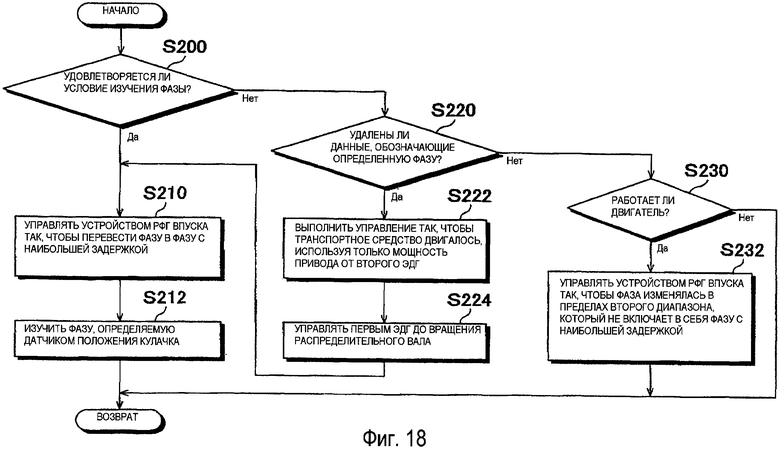
Электронный модуль управления выполняет программу, на основе которой, когда выполняют управление отсечкой подачи топлива или когда гибридное транспортное средство движется во втором режиме, в котором двигатель остановлен, и гибридное транспортное средство движется, используя только мощность привода, генерируемую вторым электродвигателем-генератором, устройством регулирования фаз газораспределения впуска управляют так, что фазу клапана переводят в механически определенную фазу с наибольшей задержкой. Фазу, которую определяют с помощью датчика положения кулачка, определяют как фазу с наибольшей задержкой. 9 н. и 16 з.п. ф-лы, 18 ил.
1. Электронный модуль управления для устройства регулируемых фаз газораспределения транспортного средства с гибридным приводом, который изменяет фазу клапана, по меньшей мере, одного из впускного клапана и выпускного клапана в пределах первого диапазона от первой фазы, представляющей собой фазу с наибольшей задержкой, до второй фазы, представляющей собой фазу с наибольшим опережением, путем изменения фазы распределительного вала относительно выходного вала двигателя внутреннего сгорания, содержащий:
детектор, который детектирует фазу клапана;
первый модуль управления фазой клапана, который выполняет управление для перевода фазы клапана в первую фазу, когда двигатель внутреннего сгорания остановлен, в то время как транспортное средство движется, благодаря мощности привода, генерируемой источником мощности привода, который отличается от двигателя внутреннего сгорания; и
модуль изучения, который изучает фазу клапана, определяемую с помощью детектора, когда фазой клапана управляют с переводом в первую фазу.
2. Модуль по п.1, в котором первый модуль управления фазой клапана выполняет управление для перевода фазы клапана в первую фазу, когда впрыск топлива остановлен в двигателе внутреннего сгорания.
3. Модуль по п.1 или 2, в котором:
двигатель внутреннего сгорания установлен в транспортном средстве, которое движется в режиме стабилизации скорости, выбранном из первого режима, в котором транспортное средство движется, используя мощность привода, генерируемую двигателем внутреннего сгорания, и второго режима, в котором транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, который отличается от двигателя внутреннего сгорания; и
первый модуль управления фазой клапана выполняет управление для перевода фазы клапана в первую фазу, когда транспортное средство движется во втором режиме.
4. Электронный модуль управления для устройства регулируемых фаз газораспределения, который изменяет фазу клапана, по меньшей мере, одного из впускного клапана и выпускного клапана в пределах первого диапазона от первой фазы, представляющей собой фазу с наибольшей задержкой, до второй фазы, представляющей собой фазу с наибольшим опережением, путем изменения фазы распределительного вала относительно выходного вала двигателя внутреннего сгорания, содержащий:
детектор, который детектирует фазу клапана;
первый модуль управления фазой клапана, который выполняет управление для перевода фазы клапана в первую фазу, когда двигатель внутреннего сгорания остановлен;
модуль изучения, который изучает фазу клапана, определяемую детектором, когда фазой клапана управляют с переводом в первую фазу; и второй модуль управления фазой клапана, который выполняет управление для изменения фазы клапана в пределах второго диапазона, который не включает в себя первую фазу, когда двигатель внутреннего сгорания работает.
5. Модуль по п.4, в котором первый модуль управления фазой клапана выполняет управление для перевода фазы клапана в первую фазу, когда впрыск топлива остановлен в двигателе внутреннего сгорания.
6. Модуль по п.4 или 5, в котором:
двигатель внутреннего сгорания установлен в транспортном средстве, которое движется в режиме стабилизации скорости, выбранном из первого режима, в котором транспортное средство движется, используя мощность привода, генерируемую двигателем внутреннего сгорания, и второго режима, в котором транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, который отличается от двигателя внутреннего сгорания; и
первый модуль управления фазой клапана выполняет управление для перевода фазы клапана в первую фазу, когда транспортное средство движется во втором режиме.
7. Устройство управления для транспортного средства, включающего в себя двигатель внутреннего сгорания и источник мощности привода, который отличается от двигателя внутреннего сгорания, при этом двигатель внутреннего сгорания содержит электронный модуль управления для устройства регулируемых фаз газораспределения, который изменяет фазу клапана, по меньшей мере, одного из впускного клапана и выпускного клапана в пределах диапазона от первой фазы, представляющей собой фазу с наибольшей задержкой, до второй фазы, представляющей собой фазу с наибольшим опережением, путем изменения фазы распределительного вала относительно выходного вала двигателя внутреннего сгорания, причем устройство управления содержит:
детектор, который детектирует фазу клапана;
первый модуль управления фазой клапана, который выполняет управление для перевода фазы клапана в первую фазу, когда двигатель внутреннего сгорания остановлен;
модуль изучения, который изучает фазу клапана, определяемую детектором, когда фазой клапана управляют с переводом в первую фазу;
второй модуль управления фазой клапана, который выполняет управление таким образом, что транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, без работы двигателя внутреннего сгорания; и
третий модуль управления фазой клапана, который выполняет управление так, что распределительный вал вращается с помощью мощности привода, генерируемой вращающимся электрическим устройством, когда транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, без работы двигателя внутреннего сгорания, причем первый модуль управления фазой клапана выполняет управление для перевода фазы клапана в первую фазу, когда распределительный вал вращается с помощью мощности привода, генерируемой вращающимся электрическим устройством.
8. Устройство по п.7, в котором второй модуль управления фазой клапана выполняет управление таким образом, что транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, без работы двигателя внутреннего сгорания, когда удалены данные, которые обозначают определенную фазу.
9. Устройство по п.7, дополнительно содержащее: четвертый модуль управления фазой клапана, который выполняет управление таким образом, что фаза клапана изменяется в пределах диапазона, который не включает в себя первую фазу, во время работы двигателя внутреннего сгорания.
10. Устройство по п.7, в котором второй модуль управления фазой клапана выполняет управление таким образом, что транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, когда заданное условие изучения удовлетворяется.
11. Устройство по п.10, в котором заданное условие изучения включает в себя условие, что управление отсечкой подачи топлива выполняют для двигателя внутреннего сгорания.
12. Способ управления для устройства регулируемых фаз газораспределения транспортного средства с гибридным приводом, который изменяет фазу клапана, по меньшей мере, одного из впускного клапана и выпускного клапана в пределах первого диапазона от первой фазы, представляющей собой фазу с наибольшей задержкой, до второй фазы, представляющей собой фазу с наибольшим опережением, путем изменения фазы распределительного вала относительно выходного вала двигателя внутреннего сгорания, при котором:
определяют фазу клапана;
выполняют управление для перевода фазы клапана в первую фазу, когда двигатель внутреннего сгорания остановлен, в то время как транспортное средство движется, благодаря мощности привода, генерируемой источником мощности привода, который отличается от двигателя внутреннего сгорания; и
изучают фазу клапана, которую определяют, когда фазой клапана управляют с переводом в первую фазу.
13. Способ по п.12, при котором управление переводом фазы клапана в первую фазу выполняют, когда в двигателе внутреннего сгорания останавливают впрыск топлива.
14. Способ по п.12, при котором:
когда двигатель внутреннего сгорания установлен в транспортном средстве, которое движется в режиме стабилизации скорости, выбранном из первого режима, в котором транспортное средство движется, используя мощность привода, генерируемую двигателем внутреннего сгорания, и вторым режимом, в котором транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, который отличается от двигателя внутреннего сгорания,
выполняют управление для перевода фазы клапана в первую фазу, когда транспортное средство движется во втором режиме.
15. Машиночитаемый носитель, на котором записана программа, с помощью которой компьютер воплощает способ управления по любому из пп.12-14.
16. Способ управления для устройства регулируемых фаз газораспределения, который изменяет фазу клапана, по меньшей мере, одного из впускного клапана и выпускного клапана в пределах первого диапазона от первой фазы, представляющей собой фазу с наибольшей задержкой, до второй фазы, представляющей собой фазу с наибольшим опережением, путем изменения фазы распределительного вала относительно выходного вала двигателя внутреннего сгорания, при котором:
определяют фазу клапана;
выполняют управление для перевода фазы клапана в первую фазу, когда двигатель внутреннего сгорания остановлен;
изучают фазу клапана, которую определяют, когда фазой клапана управляют с переводом в первую фазу; и
выполняют управление для изменения фазы клапана в пределах второго диапазона, который не включает в себя первую фазу, во время работы двигателя внутреннего сгорания.
17. Способ по п.16, при котором управление переводом фазы клапана в первую фазу выполняют, когда в двигателе внутреннего сгорания останавливают впрыск топлива.
18. Способ по п.16, при котором:
когда двигатель внутреннего сгорания установлен в транспортном средстве, которое движется в режиме стабилизации скорости, выбранном из первого режима, в котором транспортное средство движется, используя мощность привода, генерируемую двигателем внутреннего сгорания, и вторым режимом, в котором транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, который отличается от двигателя внутреннего сгорания,
выполняют управление для перевода фазы клапана в первую фазу, когда транспортное средство движется во втором режиме.
19. Машиночитаемый носитель, на котором записана программа, с помощью которой компьютер воплощает способ управления по любому из пп.16-18.
20. Способ управления для транспортного средства, включающего в себя двигатель внутреннего сгорания и источник мощности привода, который отличается от двигателя внутреннего сгорания, при этом двигатель внутреннего сгорания содержит устройство регулируемых фаз газораспределения, которое изменяет фазу клапана, по меньшей мере, одного из впускного клапана и выпускного клапана в пределах диапазона от первой фазы, представляющей собой фазу с наибольшей задержкой, до второй фазы, представляющей собой фазу с наибольшим опережением, путем изменения фазы распределительного вала относительно выходного вала двигателя внутреннего сгорания, при этом согласно способу:
определяют фазу клапана; выполняют управления для перевода фазы клапана в первую фазу, когда двигатель внутреннего сгорания остановлен;
изучают фазу клапана, определяемую, когда фазой клапана управляют с переводом в первую фазу;
выполняют управление таким образом, что транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, без работы двигателя внутреннего сгорания;
выполняют управление так, что распределительный вал вращается, благодаря мощности привода, генерируемой вращающимся электрическим устройством, когда транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, без работы двигателя внутреннего сгорания; и
выполняют управление для перевода фазы клапана в первую фазу, когда распределительный вал вращается, благодаря мощности привода, генерируемой вращающимся электрическим устройством.
21. Способ по п.20, при котором управление выполняют так, что транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, без работы двигателем внутреннего сгорания, когда удалены данные, которые обозначают определенную фазу.
22. Способ по п.20, при котором дополнительно: выполняют управление таким образом, что фаза клапана изменяется в пределах диапазона, который не включает в себя первую фазу, когда двигатель внутреннего сгорания работает.
23. Способ по п.20, при котором управление выполняют так, что транспортное средство движется, используя мощность привода, генерируемую источником мощности привода, когда заданное условие изучения удовлетворяется.
24. Способ по п.23, при котором заданное условие изучения включает в себя условие, в котором выполняют управление отсечкой подачи топлива для двигателя внутреннего сгорания.
25. Машиночитаемый носитель, на котором записана программа, с помощью которой компьютер воплощает способ управления по любому из пп.20-24.
| СПОСОБ ПОЛУЧЕНИЯ МОЛЕКУЛЯРНО-ИМПРИНТИРОВАННОГО ПОЛИМЕРА | 2008 |
|
RU2385889C1 |
| US 5611304 A, 18.03.1997 | |||
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| JP 2001082190 A, 27.03.2001 | |||
| JP 2004156461 A, 03.06.2004 | |||
| Механизм газораспределения двигателя внутреннего сгорания | 1981 |
|
SU1035249A1 |

