Изобретение относится к метрологии, в частности к устройствам для воспроизведения угловой скорости (мерам угловой скорости).
Известны устройства, предназначенные для вращения объектов с требуемой угловой скоростью, которая с контролируемой точностью остается постоянной или изменяется во времени по заданному закону. Как правило, такие устройства имеют в своем составе поворотный стол, на котором закрепляют объект, устройство для измерений угла его поворота (углоизмерительное устройство - далее УУ), эталон времени/частоты, по временным меткам которого синхронизованы выходные сигналы УУ, и двигатель стола, управляемый указанными сигналами.
Примерами подобных устройств являются:
1) ряд моделей поворотных столов фирмы ПО «Корпус» (г.Саратов, Россия; технические характеристики приведены на вэб-сайте http://www.korpus64.ru);
2) ряд моделей поворотных столов фирмы «Стан-Самара» (г.Самара, Россия; технические характеристики приведены на вэб-сайте http://www.stan-samara.ru);
3) ряд моделей поворотных столов фирмы Acutronic (Швейцария, характеристики приведены на вэб-сайте http://www.acutronic.com);
4) двухосный стенд для испытаний инерциальных навигационных систем, производитель: СПб ГЭТУ «ЛЭТИ», С.-Петербург, Россия (Иванов П.А., Двухосный автоматизированный стенд для испытаний микромеханических модулей. // Гироскопия и навигация, №2 (65), 2009, с.102).
Измерение угла поворота вокруг заданной оси в известных устройствах происходит непосредственно с помощью встроенного измерительного преобразователя угла того или иного типа. Сигналы последнего синхронизируются по временным меткам, получаемым от встроенного или внешнего эталона времени/частоты (например, кварцевого генератора частоты). Затем на основании зарегистрированных пар «текущий угол поворота»/«момент времени» вырабатываются сигналы, управляющие двигателем стола с целью поддержания угловой скорости его вращения в требуемых пределах (которые могут быть постоянными или определенным образом зависеть от времени).
Предполагается, что предварительно должны быть аттестованы с требуемой точностью преобразователь угла и генератор частоты, а также изучены и нормированы динамические свойства двигателя стола и системы его управления в случае необходимости воспроизведения переменной угловой скорости.
Наиболее близким по технической сущности и принятым за прототип устройством является поворотный стол модели «Single Rate Table AC1120S-V3.0» (производитель: фирма Acutronic (Schweiz) AG, Швейцария, интернет-ресурс http://www.acutronic.com; далее - Acutronic), являющийся одним из компонентов климатической камеры AC1120S.
Устройство Acutronic обеспечивает воспроизведение угловых скоростей в диапазоне ±3000°/с и имеет следующие точностные, динамические и массогабаритные характеристики:
- разрешение 0,001°/с
-стабильность средней за оборот угловой скорости 0,001% (мгновенная угловая скорость не нормирована);
- наибольшее угловое ускорение без нагрузки 40000°/с2;
- полезная нагрузка до 20 кг;
- масса устройства в целом 350 кг;
- масса поворотного стола 40 кг;
-размеры устройства в целом 1200×1420×715 мм;
-размеры поворотного стола 350×350×405 мм;
- частота съема показаний 150 Гц (по угловой скорости).
Существенные признаки прототипа состоят в наличии подвижного (допускающего вращение вокруг фиксированной оси) поворотного стола с двигателем; УУ, реализованного в виде установленного на ось вращения измерительного преобразователя угла; генератора частоты для синхронизации измерительных сигналов; системы управления двигателем стола, на вход которой подаются измерительные сигналы преобразователя угла и соответствующие им временные метки генератора.
Недостатками известного устройства являются:
- ограниченная точность воспроизведения угловой скорости;
- необходимость использования в процессе эксплуатации дорогостоящих средств поверки/калибровки УУ (эталонных кварцевых призм, автоколлиматоров и т.п.), которые требуют специальных условий при их применении, включая высокие требования к квалификации персонала;
- ограниченная точность привязки сигналов УУ к временным меткам генератора частоты.
При этом можно выделить основные параметры прототипа, влияющие на точность воспроизведения им угловой скорости, в соответствии со следующими тремя группами факторов: 1) метрологические характеристики УУ; 2) характеристики стабильности работы двигателя, задающего вращение стола, включая систему его управления; 3) характеристики стабильности шкалы времени, формируемой генератором частоты, и точности сопоставления ее меток сигналам УУ. Данные о стабильности использованного в прототипе генератора частоты отсутствуют, однако следует учитывать, что общедоступны генераторы частоты с относительной стабильностью на уровне 10-7 и лучше (что вполне достаточно для рассматриваемых целей).
Вследствие недостатков устройства Acutronic ими могут быть оснащены лишь учреждения, имеющие возможность (самостоятельно или путем обращения в соответствующие аккредитованные организации) осуществления контроля угломерных приборов в стационарных условиях, с обязательным использованием для их периодической поверки/калибровки эталонных кварцевых призм и автоколлиматоров. Вместе с тем, существует ряд областей использования этих приборов, для которых чрезвычайно существенными были бы мобильность в сочетании с возможностью оперативного, проводимого на месте эксплуатации контроля их точности и стабильности. В качестве примера можно привести создание и эксплуатацию различных систем динамического углового позиционирования: средства космического наблюдения и дальней космической связи, манипуляторы (робототехника), координатные измерительные машины, обрабатывающие центры с ЧПУ, стыковочные узлы космической и подводной аппаратуры и ряд других.
Задача, которая решается предлагаемым изобретением, заключается в улучшении метрологических характеристик устройства (точность, возможность самоконтроля путем проведения внутренней калибровки) с одновременным повышением его функциональной надежности.
Задача решается путем использования в составе предлагаемого устройства многозначной голографической меры плоского угла - голографической призмы (Патент РФ №2332638 С1. Многозначная голографическая мера плоского угла / Грановский В.А., Кудрявцев М.Д., Рыскин А.И., Щеулин А.С. // Б.И. - 2008. - №24). Последняя представляет собой кристалл с записанной в нем системой наложенных голограмм. Кристалл устанавливают в центр поворотного стола и освещают лучом референтного лазера, совпадающим с осью вращения стола. В результате возникает веер дифрагированных лучей, исходящих из центра кристалла, плоскость которого перпендикулярна референтному лучу.
Другим важным элементом предлагаемого устройства является фотоэлектронный приемник панорамного (кольцевого) типа, выполняющий функцию носителя неподвижной круговой шкалы.
Голографическая призма (далее - ГП) выполняет функцию хранения углов между лучами веера, причем углы являются опорными (эталонными) при формировании круговой шкалы. Кроме того, ГП служит подвижным многоотсчетным оптическим указателем угла поворота стола относительно шкалы.
Хранимые указателем опорные углы между отдельными дифрагированными лучами обладают высокой стабильностью, достаточной для обеспечения требуемого уровня точности предлагаемого устройства. При этом лучи в веере могут быть расположены в плоскости с равномерным или неравномерным угловым шагом. По сути, они являются аналогами нормалей к боковым граням кварцевых призм, которые широко используются при калибровке высокоточных УУ. Однако формируемая веером лучей ГП дополнительная опорная шкала не используется непосредственно для измерений (как в случае кварцевой призмы), а служит для целей внутренней калибровки (самоконтроля) основной шкалы устройства.
Круговая шкала предлагаемого устройства неподвижна относительно основания поворотного стола. Ее носитель расположен на внутренней цилиндрической поверхности, концентричной оси вращения стола, и состоит из одного кольцевого или нескольких секторных элементов (например, ПЗС-линеек, ПЗС-матриц, однокристалльных КМОП датчиков изображения и т.п.). В случае составного фотоприемника система считывания (регистрации) предлагаемого устройства предусматривает процедуру аппаратной или программной «сшивки» соседних секторных элементов, основанной на совместном использовании двух и более дифрагированных лучей в веере указателя. Для регистрации и визуального отображения реализованного угла поворота стола служит электронный блок локализации и обработки сигналов, опрашивающий элементы фотоприемника и при необходимости обеспечивающий двустороннюю связь с внешним персональным компьютером (через управляющий блок, непосредственно связанный с двигателем стола). Функцию обработки первичных сигналов указанных элементов и другие сервисные функции также может выполнять внешний компьютер.
Следует подчеркнуть, что в силу многозначности использованной угловой меры в виде ГП имеет место избыточность в части измерений углов указанным способом и соответственно избыточность в части измерений угловых скоростей. А именно при привязке сигналов, регистрируемых фотоприемником, к имеющимся эталонным временным меткам каждый из возникающих лучей в веере порождает свою локальную временную шкалу. Это позволяет существенно повысить точность определения текущей угловой скорости.
Имеется три существенных отличия предлагаемого устройства от прототипа:
1) в предлагаемом устройстве используется многоотсчетный указатель вместо обычного преобразователя угла, что позволяет осуществить избыточные угловые измерения в нескольких синхронизованных локальных шкалах времени;
2) угловая (круговая) шкала предлагаемого устройства формируется непосредственно перед каждым измерением в результате взаимодействия многоотсчетного указателя с носителем круговой шкалы - фотоэлектронным приемником панорамного типа, в то время как функция долговременного хранения сформированных угловых отметок шкалы передана указателю;
3) наличие описанного указателя в предлагаемом устройстве позволяет существенно увеличить период между калибровками с использованием внешних эталонов (кварцевых призм и автоколлиматоров).
Входящий в состав предлагаемого устройства многоотсчетный указатель (формирующий при его освещении лазером плоский веер из нескольких одновременно возникающих дифрагированных лучей) реализуется посредством голографической призмы в модификации, имеющей ортогональную геометрию.
Остаточный радиальный бой и люфт вращательного движения стола могут приводить к неидеальности вращения лучей указателя относительно основной шкалы устройства и появлению соответствующей погрешности в отсчетах по шкале. Для устранения этих факторов каждая голограмма должна формировать пару лучей, расположенных через 180°. С этой целью предлагается использовать устройство удвоения дифрагированных лучей, представляющее собой либо расположенное позади кристалла плоское зеркало, возвращающее излучение от лазера, либо два встречно направленных лазера, одновременно освещающих кристалл голографической призмы с противоположных сторон. В такой конструкции веер образует пары взаимно противоположных по направлению дифрагированных лучей, что позволяет использовать полусумму отсчетов, формируемых по сигналам от двух диаметрально расположенных элементов-фотоприемников (число которых выбрано четным). Такой прием устраняет влияние на результат измерений остаточного радиального боя вращающихся частей устройства.
Для обеспечения «гладкой сшивки» соседних в кольцевом блоке элементов-фотоприемников (в случае составного фотоприемника), когда некоторые из лучей веера попадают на «слепую» границу между элементами, указатель формирует не менее двух пар дифрагированных лучей. Использование большего числа пар дифрагированных лучей обеспечивает избыточность измерительной процедуры, что позволяет также выполнять с необходимой дискретностью и точностью внутреннюю калибровку устройства в процессе его эксплуатации с целью формирования (непосредственно перед каждым измерением) текущей реализации круговой шкалы. При этом соответствие требованиям к размеру шага калибровки достигается выбором определенной неравномерности взаимного углового расположения дифрагированных лучей, формируемых указателем. Целесообразное число пар дифрагированных лучей (голограмм) составляет от 5 до 15 в зависимости от углового размера элементов в кольцевом блоке составного фотоприемника и требуемой точности устройства. При этом малые размеры предлагаемого устройства позволяют встраивать его в системы динамического углового позиционирования и использовать для контроля точности в процессе эксплуатации.
Таким образом, предлагаемое устройство содержит следующие основные элементы:
- поворотный стол;
- допускающий управление двигатель стола;
- закрепляемый на столе многоотсчетный (многолучевой) указатель, формирующий парно расположенные и противоположно направленные дифрагированные лучи, в сочетании с подвижным или неподвижным относительно указателя и освещающим его маломощным референтным лазером с устройством удвоения дифрагированных лучей;
- закрепляемый соосно столу на неподвижной части устройства (основании стола) фотоприемник панорамного (кольцевого) типа;
- блок локализации и обработки сигналов, поступающих от фотоприемника;
- генератор частоты, формирующий несколько согласованных локальных шкал времени по сигналам от указателя (после преобразования их фотоприемником);
- блок управления, регистрирующий и обрабатывающий синхронизованные измерительные сигналы и управляющий двигателем стола, в том числе с целью самоконтроля формируемой фотоприемником круговой шкалы.
Указанные элементы, исключая собственно поворотный стол, образуют следящий привод, и каждый из элементов снабжен источником питания (индивидуальным или совместным). Блок управления может иметь двустороннюю связь с внешним персональным компьютером.
Исходя из изложенного выше заявленная совокупность признаков позволяет получить устройство для воспроизведения угловой скорости (меру угловой скорости), на основе многоотсчетного (многолучевого) указателя, отличающееся повышенной точностью, а также возможностью самоконтроля путем проведения его внутренней калибровки в процессе эксплуатации без использования каких-либо дополнительных приспособлений, по результатам которого возможна в том числе проверка работоспособности устройства (включая целостность его конструкции) после виброударных и иных внешних воздействий.
Сущность изобретения поясняется представленными фигурами, где приведена обобщенная структура устройства и введены следующие обозначения:
фиг.1 - принципиальная схема расположения составных частей устройства: 1 - референтный лазер; 2 - референтный луч, освещающий кристалл с голограммами; 3 - закрепленный на столе многоотсчетный указатель в виде голографической призмы (кристалла с голограммами); 4 - поворотный стол; 5 - двигатель стола; 6 - одновременно возникающие веерные дифрагированные лучи; 7 - генератор частоты, формирующий несколько согласованных локальных шкал времени по сигналам от указателя; 8 - блок локализации и обработки сигналов; 9а - один из элементов неподвижного панорамного фотоприемника; 10 - блок управления; 11 - персональный компьютер (опционально);
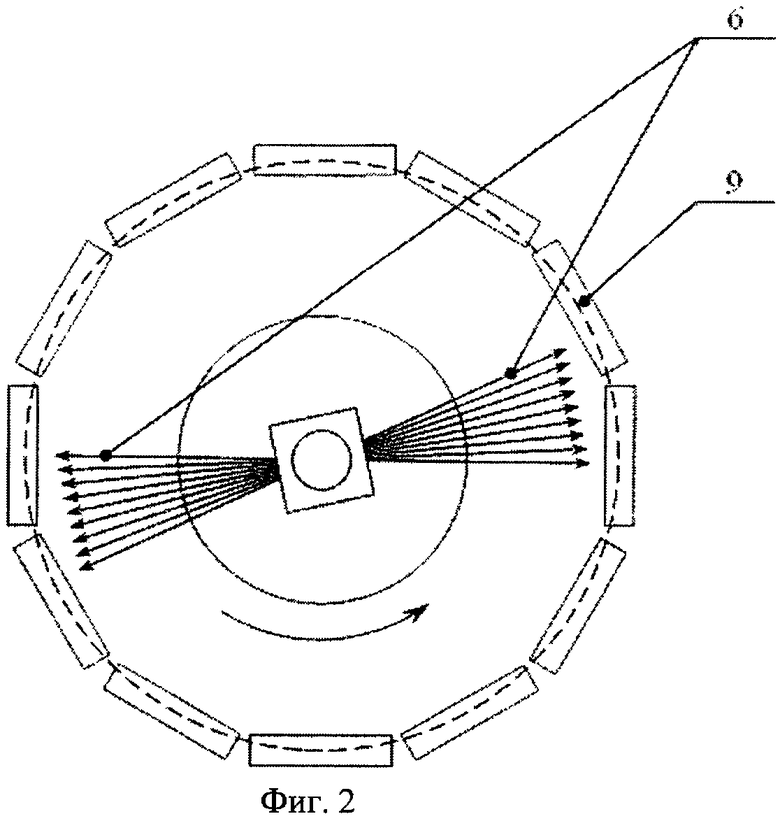
фиг.2 - взаимное расположение подвижного многоотсчетного указателя с двумя веерами дифрагированных лучей 6 и неподвижного панорамного фотоприемника 9 (вид вдоль оси вращения);
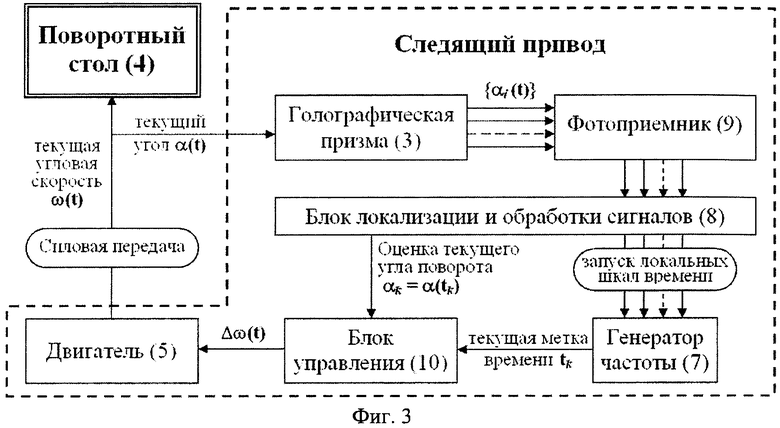
фиг.3 - функциональная схема устройства.
Устройство работает следующим образом. Референтный лазер 1 генерирует референтный луч 2, направленный на указатель 3 в виде голографической призмы и ориентированный вдоль оси поворотного стола 4, создавая одновременно возникающие дифрагированные лучи 6, расположенные веерообразно и перпендикулярно оси вращения. Дифрагированные лучи 6 указателя 3 формируются парами противоположно направленных лучей за счет использования устройства удвоения дифрагированных лучей, основанного на помещении возвращающего плоского зеркала на пути пошедшего сквозь указатель 3 части излучения референтного лазера 1. Допускается также непосредственное использование двух встречно направленных на указатель референтных лазеров. Регистрацию углового положения стола 4 с вращающимися вместе с ним двумя веерами дифрагированных лучей 6 осуществляют относительно неподвижного составного фотоприемника 9 кольцевого типа, в качестве элементов 9а которого выбраны ПЗС-матрицы. Первичные сигналы элементов-фотоприемников 9а поступают в блок локализации и обработки сигналов 8 с целью формирования отсчета (угла поворота) по основной шкале устройства. Указанный блок запускает также несколько согласованных между собой локальных шкал времени, привязанных к временным меткам генератора частоты 7. Полученные в блоке 8 угловые отсчеты и отвечающие им моменты времени из блока 7 поступают в блок управления 10, который формирует сигналы, управляющие работой двигателя стола 5 с целью поддержания его угловой скорости в заданных постоянных (или зависящих от времени) пределах. Ряд сервисных функций выполняет либо блок управления 10 либо по его командам внешний персональный компьютер 11, на который установлено соответствующее программное обеспечение.
Примером конкретной реализации предлагаемого устройства воспроизведения угловой скорости (меры угловой скорости) в диапазоне ±8°/с может служить поворотное устройство (ПУ) в виде поворотного стола от фрезерного станка (изготовитель «Иркутский станкостроительный завод», г.Иркутск, Россия). Его выбор обусловлен высокой стабильностью вертикально расположенной оси вращения, задаваемой нижней торцевой плоскостью планшайбы стола, которая скользит по плоской кольцевой направляющей. За счет остаточных люфтов в подшипнике шпинделя возникает радиальный бой (люфт) планшайбы стола, который нормируют. Для воспроизведения заданной угловой скорости указанное ПУ оснащено следующими дополнительными элементами:
- шаговым двигателем (с соответствующей редукторной системой), осуществляющим вращение ПУ;
- закрепленной на оси ПУ голографической призмой в качестве многоотсчетного указателя, формирующего шесть пар противоположно направленных лучей (от шести голограмм);
- неподвижным относительно голографической призмы маломощным референтным лазером (с источником питания), расположенным вдоль оси вращения ПУ и направленным в центр кристалла голографической призмы;
- возвращающим плоским зеркалом позади голографической призмы (вдоль оси референтного лазера), выполняющим функцию устройства удвоения дифрагированных лучей;
- неподвижным фотоприемником панорамного типа на основе кольцевого блока ПЗС-матриц, расположенным параллельно плоскости планшайбы стола симметрично относительно оси ее вращения;
- управляющим и регистрирующим электронным блоком (с источником питания), связанным с внешним персональным компьютером.
Шаговый двигатель следящего привода оснащен переключаемой редукторной системой с переменным понижающим коэффициентом редукции (передаточное число от 102…104 до 106…108 шагов на полный оборот ПУ). При этом увеличенные значения указанного коэффициента используют для проведения внутренней калибровки круговой шкалы, формируемой кольцевым блоком ПЗС-матриц, с более высокой требуемой точностью. Голографическую призму (с возвращающим плоским зеркалом) и освещающий ее референтный лазер устанавливают непосредственно на планшайбу стола. Панорамный фотоприемник закрепляют по высоте на уровне центра кристалла голографической призмы неподвижно относительно корпуса ПУ, что упрощает реализацию его связи с управляющим и регистрирующим электронным блоком.
В качестве шагового двигателя выбран достаточно мощный электромотор FL-86 с блоком питания модели SMD-80M-02, укомплектованным источником тока GPF-U500S. В качестве генератора, задающего управляющие TTL-импульсы переменной частоты для разгона/торможения электромотора, используется персональный компьютер (через его параллельный порт). Тем самым обеспечивается угловая скорость вращения мотора до 25 об/с (9000°/с) и вращательный момент на валу 13 Н·м (изготовитель НПФ «Электропривод», С.-Петербург, Россия, http://electroprivod.ru).
Редукторная система состоит из следующих элементов:
1) редуктор червячный РЧ-25 (передаточное число Z1=50, изготовитель ЗАО «Завод «Редуктор», С.-Петербург, Россия);
2) редуктор цилиндротороидный РЦТ-63 (Z2=12,5, изготовитель ЗАО «Завод «Редуктор»);
3) поворотный стол от фрезерного станка (Z3=90, изготовитель «Иркутский станкостроительный завод»);
4) Мотор FL-86 (Z4=400 шагов на оборот в полушаговом режиме, изготовитель НПФ «Электропривод»).
Минимально реализуемое (с учетом мощности мотора FL-86) передаточное число данной редукторной системы составляет Z2Z3Z4=450000 шагов на оборот (что соответствует максимальной угловой скорости 8°/с). Максимально реализуемое передаточное число составляет Z1Z2Z3Z4,=22500000 шагов на оборот и используется в случае необходимости откалибровать круговую шкалу устройства на уровне единиц/долей угловой секунды.
В качестве референтного лазера, освещающего голографическую призму, выбран газовый лазер типа ЛГН (ОАО НИИ ГРП «Плазма», г.Рязань, Россия, www.plasmalabs.ru) с параметрами согласно табл.1.
В качестве элементов-фотоприемников выбраны ПЗС-матрицы типа SONY ICX 415 AL с параметрами согласно табл.2. Возможное количество ПЗС-матриц в кольцевом блоке равно 20-400 (ориентировочно). Если условно принять, что горизонтальный размер одной ПЗС-матрицы (из блока) равен 5 мм, то они будут расположены на окружности ⌀50-650 мм (с угловым шагом 1-20°). Возможной альтернативой ПЗС-матрице является однокристалльный КМОП датчик изображения.
Погрешность измерений текущей угловой скорости предлагаемым устройством обусловлена погрешностью измерений углов поворота, поскольку стабильность используемых локальных шкал времени превышает требуемую более чем на порядок. В свою очередь, нижняя граница погрешности измерений углов определяется, прежде всего, уровнем люфтов в подшипниках шпинделя, угол поворота которого требуется контролировать. Использованное ПУ в виде указанного выше поворотного стола позволяет измерять углы его поворота описанным способом (с помощью голографической призмы в паре с фотоэлектронной круговой шкалой) с погрешностью порядка 1…10''. Для специально изготавливаемого ПУ, использующего шпиндель с осью вращения в газостатических опорах или другой с аналогичными характеристиками (люфтами), как показали предварительные расчеты, данный метод позволит измерить углы с высокой (~0,1'') и сверхвысокой (~0,01'') точностью.
Вторым фактором, влияющим на точность измерений углов предлагаемым устройством, является использованное для калибровки его круговой шкалы передаточное число редукторной системы. Для уровня точности 0,1'' передаточное число должно составлять не менее 2·107 шагов на оборот ПУ.
Третьим фактором является степень избыточности измерительной процедуры, возникающая за счет использования нескольких согласованных между собой локальных шкал времени (задается числом записанных в кристалле голограмм).
С учетом перечисленных факторов нижняя граница погрешности измерений текущей угловой скорости предлагаемым устройством составляет 0,0003% и менее.
Устройство для воспроизведения угловой скорости (мера угловой скорости) на основе многозначной голографической меры плоского угла
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерений мгновенных угловых перемещений качающейся платформы | 2016 |
|
RU2642975C2 |
| ОПТИКО-МЕХАНИЧЕСКОЕ УГЛОМЕРНОЕ УСТРОЙСТВО ПОВОРОТНОГО ТИПА С ОПТИЧЕСКИМ УКАЗАТЕЛЕМ НА ОСНОВЕ МНОГОЗНАЧНОЙ МЕРЫ И ФОТОЭЛЕКТРОННЫМ РЕГИСТРАТОРОМ | 2007 |
|
RU2377498C2 |
| МНОГОЗНАЧНАЯ ГАЛОГРАФИЧЕСКАЯ МЕРА ПЛОСКОГО УГЛА | 2006 |
|
RU2332638C1 |
| ЛАЗЕРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ С ОБЪЕМНОЙ ФУРЬЕ-ГОЛОГРАММОЙ | 2013 |
|
RU2539755C2 |
| Устройство для измерения голографических характеристик фоторегистрирующих сред | 1984 |
|
SU1254428A1 |
| Устройство для измерения голографических характеристик фоторегистрирующих сред | 1983 |
|
SU1101781A1 |
| ЦИФРОВОЙ ГОЛОГРАФИЧЕСКИЙ МИКРОСКОП | 2013 |
|
RU2545494C1 |
| Измерительный преобразователь угловых перемещений | 1980 |
|
SU945651A1 |
| Автоматизированный гониометр для измерения углов многогранных призм | 1987 |
|
SU1427173A1 |
| Частотный способ измерения дальности с измерением частоты биений голографической измерительной системой | 2021 |
|
RU2765727C1 |
Изобретение относится к метрологии, в частности к устройствам для воспроизведения угловой скорости (мерам угловой скорости). Изобретение основано на использовании многозначной голографической меры плоского угла - голографической призмы, которая представляет собой кристалл с записанной в нем системой наложенных голограмм, устанавливаемый в центр поворотного стола, угловая скорость которого подлежит контролю, и освещаемый лучом референтного лазера, совпадающим с осью вращения стола. В результате возникает веер дифрагированных лучей, исходящих из центра кристалла, плоскость которого перпендикулярна референтному лучу. Угловая (круговая) шкала формируется непосредственно перед каждым измерением в результате взаимодействия многоотсчетного указателя с носителем круговой шкалы - фотоэлектронным приемником панорамного типа. Изобретение позволяет улучшить метрологические характеристики устройства (точность, возможность самоконтроля путем проведения внутренней калибровки) с одновременным повышением его функциональной надежности. 2 з.п. ф-лы, 3 ил., 2 табл.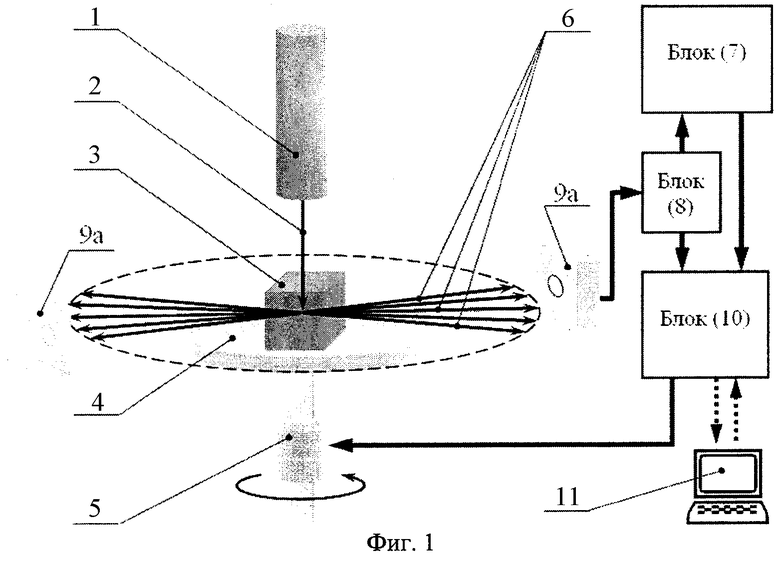
1. Устройство для воспроизведения угловой скорости (мера угловой скорости), состоящее из поворотного стола и следящего привода, который включает в себя двигатель стола, средство для измерений угла поворота стола, генератор частоты, по меткам которого синхронизованы выходные сигналы средства для измерений угла поворота, и блок управления, вырабатывающий по сигналам средства для измерений угла поворота сигналы управления двигателем стола, отличающееся тем, что средство для измерений угла поворота содержит неподвижный фотоприемник панорамного типа и закрепленную на оси стола многозначную меру угла, выполненную в виде голографической призмы с устройством удвоения дифрагированных лучей, по сигналам которой при ее вращении, зафиксированным с помощью фотоприемника, генератор частоты формирует две и более согласованных между собой локальных шкал времени.
2. Устройство по п.1, отличающееся тем, что в качестве фотоприемника панорамного типа используют блок ПЗС-матриц в виде кольца или его части или частей.
3. Устройство по п.1, отличающееся тем, что в качестве фотоприемника панорамного типа используют блок однокристальных КМОП датчиков изображения в виде кольца или его части или частей.
| http:www.acutronic.com | |||
| ОПТИКО-МЕХАНИЧЕСКОЕ УГЛОМЕРНОЕ УСТРОЙСТВО ПОВОРОТНОГО ТИПА С ОПТИЧЕСКИМ УКАЗАТЕЛЕМ НА ОСНОВЕ МНОГОЗНАЧНОЙ МЕРЫ И ФОТОЭЛЕКТРОННЫМ РЕГИСТРАТОРОМ | 2007 |
|
RU2377498C2 |
| МНОГОЗНАЧНАЯ ГАЛОГРАФИЧЕСКАЯ МЕРА ПЛОСКОГО УГЛА | 2006 |
|
RU2332638C1 |
| Устройство для нанесения шкал | 1979 |
|
SU894364A1 |
| US 6034501 A, 07.03.2000. | |||

