Настоящее изобретение относится к оптике и может быть использовано в системах биоидентификации, в частности по радужной оболочке глаза, в метрологии, а также при репортажной и художественной съемке.
Оптическая обработка изображений давно и широко известна.
Однако в обычных системах при изменении расстояния до объекта как авто- так и ручная фокусировка сопровождается изменением масштаба изображения, что в ряде случаев (биоидентификация, метрология и другие) представляется крайне нежелательным, так как дополнительные меры для корректировки масштаба требуют дополнительного времени, усложняют конструкцию и в конечном счете приводят к ухудшению качества изображения.
В настоящее время существует множество технических решений, направленных на устранение этого недостатка и основанных на различных приемах.
Известны оптические системы, содержащие первую, вторую и третью группы линз, первая и вторая из которых выполнены подвижными [см., например, патенты-аналоги фирмы Панавижн Инк. US 6961188, опубл. 05.02.2004, WO 2004/010199, опубл. 29.01.2004, TW 263797, опубл. 11.10.2006]. В таких системах формируется одно промежуточное реальное изображение, которое может быть в дальнейшем увеличено.
Известны оптические системы с изменением масштаба изображения и автофокусом [см., например, патенты US 4890132 фирмы Асахи Когаку Когио К.К., опубл. 26.12.1989, US 5055932 фирмы Виктор Кампани оф Джапан, Лтд., опубл. 08.10.1991, BY 8411. ОАО «Пеленг». Опубл. 30.08.2006, RU 2262727, Н.Е.Кунделевой и др., публикация 20.10.2005, заявки US 2008204893 фирмы Самсунг Электромеканикс Ко ЛТД, опубл. 28.08.2008, и CN 101300525 фирмы Флекстроникс АП ЛЛС, опубл. 05.11.2008]. Данные оптические системы выполнены с двумя отдельными подвижными группами линз для изменения масштаба и для фокусировки.
Известны оптические системы, содержащие несколько групп линз, хотя бы две из которых выполнены подвижными [см., например, патенты JP 60090318 фирмы Санкио Сеики Сеисакушо КК, опубл. 21.05.1985, JP 2071214 фирмы Копал Ко. Лтд., опубл. 09.03.1990, US 5748387 фирмы Ниппон Когаку КК, опубл. 05.05.1998, US 7330316 фирмы Ниппон Когаку КК, опубл. 12.02.2008]. В данных системах как изменение масштаба, так и коррекция размера изображения осуществляются согласованным движением указанных подвижных групп линз.
Наиболее близким аналогом как заявленного способа, так и заявленной оптической системы является способ и оптическая система, раскрытые в патенте US 7330316 фирмы Ниппон Когаку КК, опубл. 12.02.2008. Оптическая система по патенту содержит источник импульсного излучения для экспонирования объекта, первую линзу для коллимации излучения, рассеянного объектом, вторую линзу для переноса первого промежуточного изображения в плоскость второго промежуточного изображения, третью линзу для переноса второго промежуточного изображения в фиксированную плоскость приемника и приемник изображения. Хотя бы две из указанных линз выполнены подвижными. Способ оптической обработки изображения в данной системе предусматривает как изменение масштаба, так и коррекцию размера изображения за счет согласованного движения указанных подвижных линз.
Недостатком такой оптической системы и соответствующего способа является сложность задачи по согласованию автономного движения двух (и более) линз или групп линз.
Авторами настоящего изобретения было обнаружено, что существуют соотношения параметров неподвижной и подвижной линз или групп линз, выбор которых позволяет одновременно осуществлять автофокусировку и стабилизацию масштаба изображения передвижением только одной группы линз при нахождении или передвижении объекта в пределах рабочего диапазона расстояний от первой линзы или группы линз.
Таким образом, задачей настоящего изобретения является создание способа оптической обработки изображения и оптической системы, обеспечивающих автофокусировку и стабилизацию масштаба изображения объекта при нахождении или перемещении этого объекта вдоль оптической оси в пределах рабочей дистанции.
Поставленная задача в способе оптической обработки изображения, включающем следующие шаги:
- экспонирование объекта, перемещающегося или находящегося в пределах рабочей дистанции импульсным излучением,
- коллимацию излучения, рассеянного объектом, с помощью первой линзы или группы линз, выполненной неподвижной, и построение первого промежуточного изображения, размер которого и расположение в пространстве определяются расстоянием от объекта до входного зрачка оптической системы;
- перенос первого промежуточного изображения в фиксированную в пространстве плоскость второго промежуточного изображения и построение второго промежуточного изображения с постоянным линейным увеличением с помощью второй линзы или группы линз, выполненной подвижной вдоль оптической оси,
- перенос второго промежуточного изображения в фиксированную плоскость приемника изображения и построение изображения объекта с помощью третьей линзы или группы линз,
решается за счет того, что
- параметры первой и второй линз или групп линз выбирают в соответствии со следующими соотношениями:




где d1 - расстояние от объекта до передней главной плоскости первой линзы или группы линз,
lmax и lmin - пределы изменения рабочей дистанции до объекта,
d2 - расстояние от задней главной плоскости 1-й линзы или группы линз до передней главной плоскости 2-й группы линз,
d3 - расстояние от второго промежуточного изображения до ближайшей главной плоскости 2-й группы линз,
F1 и F2 - фокусные расстояния первой и второй линзы или группы линз,
αAD - линейное увеличение второго промежуточного изображения
и Δα/αAD - допустимая относительная погрешность финишного линейного увеличения оптической системы.
F1, F2>0, если рефракция положительная,
F1, F2<0, если рефракция отрицательная,
d3>0, если второе промежуточное изображение действительное,
d3<0, если второе промежуточное изображение мнимое.
Экспонирование объекта предпочтительно осуществляют монохроматическим, включая лазерное, излучением, особенно предпочтительно видимым или инфракрасным излучением.
Как первое промежуточное изображение, так и второе промежуточное изображение могут быть мнимыми или действительными.
Поставленная задача решена в оптической системе, содержащей источник импульсного излучения для экспонирования объекта, перемещающегося или находящегося в пределах рабочей дистанции, первую линзу или группу линз, выполненную неподвижной, для коллимации излучения, рассеянного объектом, вторую линзу или группу линз, выполненную подвижной вдоль оптической оси системы, для переноса первого промежуточного изображения в плоскость второго промежуточного изображения, третью линзу или группу линз для переноса второго промежуточного изображения в фиксированную плоскость приемника изображения и приемник изображения,
за счет того, что
- первая и вторая линзы или группы линз выполнены так, что их параметры удовлетворяют следующим соотношениям:




где d1 - расстояние от объекта до передней главной плоскости первой линзы или группы линз,
lmax и lmin - пределы изменения рабочей дистанции до объекта,
d2 - расстояние от задней главной плоскости 1-й линзы или группы линз до передней главной плоскости 2-й группы линз,
d3 - расстояние от второго промежуточного изображения до ближайшей главной плоскости 2-й группы линз,
F1 и F2 - фокусные расстояния первой и второй линзы или группы линз,
αAD - линейное увеличение второго промежуточного изображения
и Δα/αAD - допустимая относительная погрешность финишного линейного увеличения оптической системы.
F1, F2>0, если рефракция положительная,
F1, F2<0, если рефракция отрицательная,
d3>0, если второе промежуточное изображение действительное,
d3<0, если второе промежуточное изображение мнимое.
Источник излучения может быть выполнен для создания потока монохроматического, включая лазерное, излучения, предпочтительно для создания потока видимого или инфракрасного излучения.
На чертежах представлены неограничивающие примеры реализации настоящего изобретения.
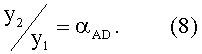
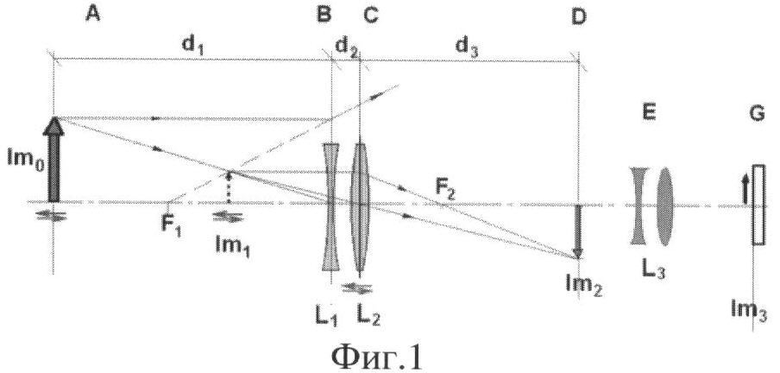
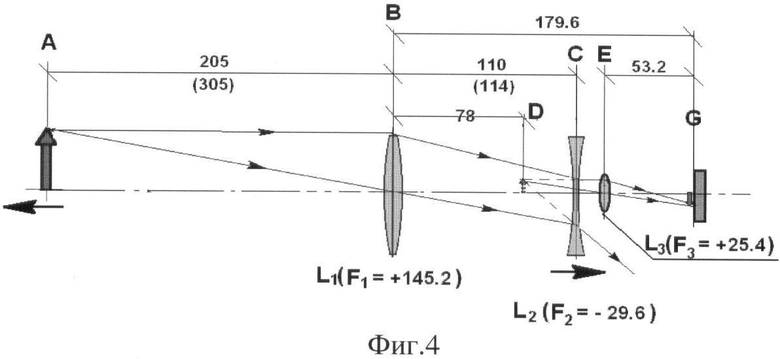
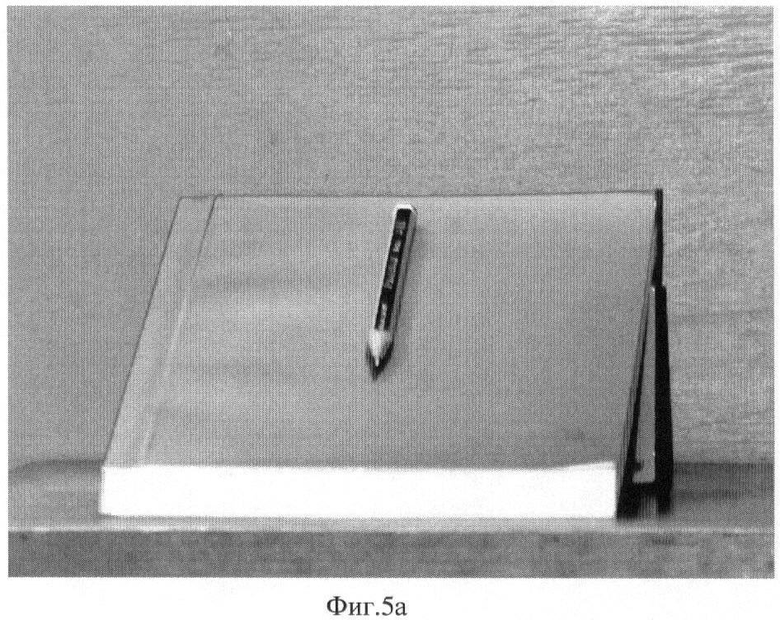
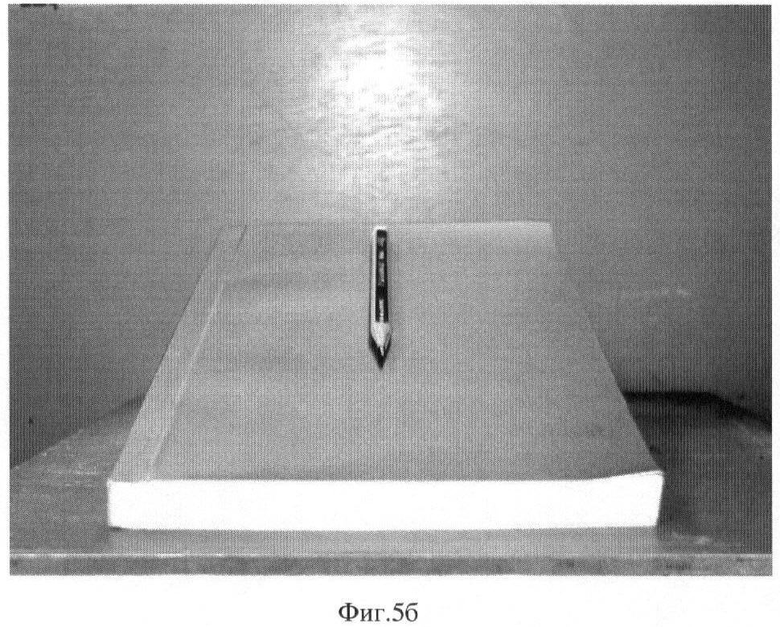
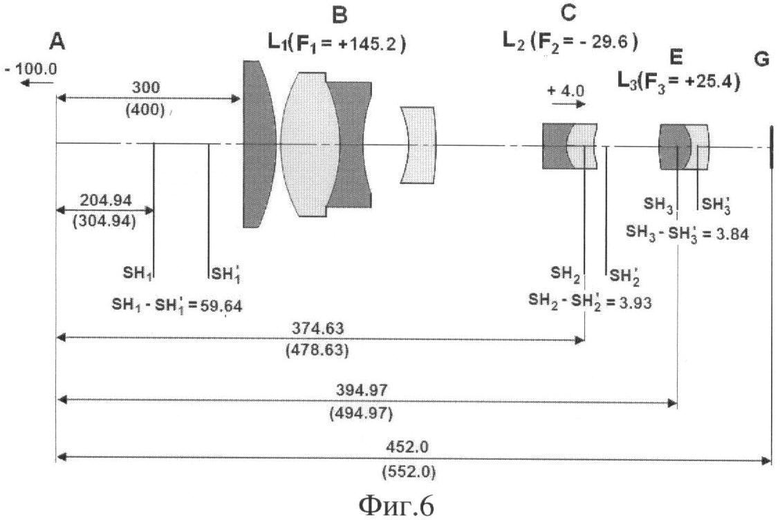
На фиг.1 представлена возможная схема реализации заявленного изобретения, данная для упрощения в приближении тонких линз. На фиг.2 представлена расчетная схема, использованная для обоснования заявленного изобретения. На фиг.3 приведена принципиальная схема одного из примеров реализации заявленной оптической системы в приближении тонких линз с первым мнимым и вторым действительным изображениями объекта при различных его положениях. На фиг.4 приведен пример реализации заявленной оптической системы в приближении тонких линз со вторым мнимым изображением. На фиг.5 показаны фотографии протяженного объекта, полученные с использованием оптической схемы, показанной на фиг.3 (фиг.5а), и с помощью обычного объектива с таким же фокусным расстоянием (фиг.5б). На фиг.6 показана промышленная реализация оптической системы для идентификации личности по радужной оболочке глаз с параметрами, адекватными примеру реализации, показанному на фиг.4.
Одинаковым элементам на всех чертежах присвоены одинаковые обозначения.
На фиг.1 А - плоскость объекта Im0, расположенная на расстоянии d1 от входной поверхности 1-й неподвижной линзы (группы линз) L1 с фокусным расстоянием F1 (плоскости В). Величина d1 адекватна рабочей дистанции до объекта. Диапазон изменений d1 задается априори. Линза (группа линз) L1 формирует первое промежуточное изображение Im1. Отрезок d2 и плоскость С отражают положение 2-й подвижной линзы (группы линз) с фокусным расстоянием F2, формирующей 2-е промежуточное изображение Im2 в плоскости D.
Заявляемый способ со ссылкой на фиг.1 включает следующие шаги.
- Экспонирование объекта А, перемещающегося или находящегося в пределах рабочей дистанции Δl импульсным источником видимого или инфракрасного излучения.
- Коллимацию излучения, рассеянного объектом, с помощью первой неподвижной линзы L1 и построение первого мнимого или действительного промежуточного изображения В, размер которого и расположение в пространстве определяются расстоянием l от объекта до входного зрачка оптической системы. При перемещении объекта вдоль оси будет перемещаться и его первое, в примере по фиг.1 - мнимое, изображение В. Вместе с перемещением изображения меняется и его размер - здесь длина стрелки.
- Перенос первого промежуточного изображения в фиксированную плоскость второго промежуточного действительного или мнимого изображения С и построение указанного второго промежуточного изображения с помощью подвижной группы линз L2, параметры которой связаны с параметрами первой группы линз L1, а также рабочей дистанцией Δl и погрешностью масштабирования Δα, заданными математическими соотношениями (1)-(4), обеспечивающими наряду с оптическим сопряжением системы объект А - фиксированная плоскость С стабилизацию линейного увеличения объекта (нормализацию). Независимо от перемещения объекта А, его второе промежуточное изображение в фиксированной плоскости С остается практически постоянным по величине (с небольшой погрешностью Δα). То есть, если при перемещении объекта А его первое промежуточное изображение В увеличивается в какое-то число раз, второе промежуточное изображение С в плоскости С пропорционально уменьшается. Таким образом, размер второго промежуточного изображения С и его положение в пространстве остаются стабильными.
- Перенос второго промежуточного изображения С и построение изображения объекта в плоскости приемника изображения D (фотоматрица, передающая телевизионная трубка и т.д.) с регулируемым вручную или автоматически масштабом (zooming) и сохранением оптического сопряжения плоскостей C-D, что в конечном счете эквивалентно оптическому сопряжению плоскости объекта А и плоскости его финишного изображения D или, иными словами, созданию в плоскости приемника сфокусированного изображения с фиксированным увеличением (масштабом).
Обоснование заявленного изобретения со ссылкой на фиг.2
Преобразование светового луча, распространяющегося в меридиональной плоскости центрированной оптической системы, описывается в матричной форме следующим образом [A.Gerrard, J.M.Burch. Introduction to Matrix Methods in Optics. Publication John Willey & Sons, London, New York, Toronto, 1976]:
где  - матрица передачи оптической системы, содержащей N элементов;
- матрица передачи оптической системы, содержащей N элементов;
y1 и u1 - радиальная и угловая координаты луча на входе оптической системы соответственно; yN и uN - координаты луча на выходе оптической системы. Под элементами оптической схемы в простейшем случае понимают отдельные сферические поверхности (тонкие линзы), а также промежутки между ними, заполненные средой с показателем преломления n. В формуле (5)  - матрица отдельного элемента оптической схемы.
- матрица отдельного элемента оптической схемы.
На фиг.2 А - плоскость объекта Im0, расположенная на расстоянии d1 от входной поверхности 1-й неподвижной линзы (группы линз) L1 с фокусным расстоянием F1 (плоскости В). Величина d1 адекватна рабочей дистанции до объекта. Диапазон изменений d1 задается априори. Линза (группа линз) L1 формирует первое промежуточное изображение Im1.
Аналогично, отрезок d2 и плоскость С отражают положение 2-й подвижной линзы (группы линз) с фокусным расстоянием F2, формирующей 2-е промежуточное изображение Im2 в плоскости D.
Для решения задачи, поставленной в заявляемом изобретении, положение плоскости D не должно изменяться при изменении дистанции до объекта (d1), а вариации линейного увеличения 2-го промежуточного изображения, определяемого как отношение y2/y1, не должны выходить за пределы допустимой погрешности.
Второе промежуточное изображение переносится в плоскость фотоприемника G системой линз L3, которая в зависимости от конкретных условий может иметь как фиксированное, так и изменяемое фокусное расстояние F3, например, для независимого от системы линз L1 и L2 управления масштабом финишного изображения Im3.
Матрица передачи  рассматриваемой оптической системы на участке A-D объединяет N=5 элементов: интервал d1, линзу L1, промежуток d2, линзу L2 и отрезок D3.
рассматриваемой оптической системы на участке A-D объединяет N=5 элементов: интервал d1, линзу L1, промежуток d2, линзу L2 и отрезок D3.
В соответствии с формулой (5)

Здесь величины y1 и y2 соответствуют обозначениям, приведенным на фигуре 2.
Согласно [A.Gerrard] условием оптического сопряжения плоскостей А и D (объект - его изображение) является равенство нулю параметра β матрицы передачи:

При выполнении условия (7) согласно формуле (6) выражение для линейного увеличения на отрезке AD принимает вид:
Можно показать, что в параксиальном приближении для оптической системы, приведенной на фиг.2, параметры αAD и βAD определяются следующими соотношениями:


Здесь F1, F2>0, если сферическая поверхность выпуклая (положительная линза);
F1, F2<0, если сферическая поверхность вогнутая (отрицательная линза);
d3>0, если второе промежуточное изображение действительное;
d3<0, если второе промежуточное изображение мнимое.
Таким образом, для решения задачи, поставленной в заявляемом изобретении, необходимо потребовать выполнения следующих условий:


 - предельно допустимая относительная погрешность линейного увеличения оптической системы в целом.
- предельно допустимая относительная погрешность линейного увеличения оптической системы в целом.
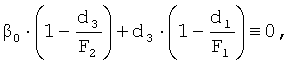
Очевидно также, что условия (1) и (2) должны быть дополнены требованием стабильности положения в пространстве второго промежуточного изображения (плоскость D на фиг.2) и независимости этого положения от вариаций расстояния d1. Это требование может быть выражено в следующей форме:

В качестве начального условия для расчета задаются допустимая погрешность увеличения Δα и границы рабочей дистанции Δl.

Уравнения (1-4) объединяют комплекс условий, необходимых для формирования в плоскости фотоприемника изображения объекта с неизменным, фиксированным увеличением (масштабом) при перемещении указанного объекта вдоль оптической оси в пределах заданной рабочей дистанции Δl (формула (4)). Эти условия следующие:
1. условие оптического сопряжения объекта и его второго промежуточного и, следовательно, финишного изображения - уравнение (1);
2. условие стабильности линейного увеличения (масштаба) объекта - уравнение (2);
3. условие постоянства пространственного положения второго промежуточного изображения - уравнение (3).
Система уравнений (1)-(4) имеет множество решений, что подтверждается приведенными ниже примерами реализации.
Пример 1
Оптическая система для фоторегистрации и последующей идентификации личности по особенностям строения лица
Оптическая система, представленная на фиг.3, обеспечивает фоторегистрацию лица человека с постоянным увеличением в диапазоне дистанций от 700 до 1000 мм. Система регистрации и идентификации личности по особенностям строения лица в этом случае не требует масштабирования изображения при его первичной компьютерной обработке и дополнительно позволяет использовать абсолютные размеры отдельных анатомических элементов в процессе распознавания.
Принцип работы оптической системы следующий.
Объект Im0 (плоскость А) расположен (или перемещается) вдоль оси оптической системы в пределах рабочей дистанции d1-d1'=Δl. Отрицательная линза (система линз) L1 (плоскость В) строит первое мнимое промежуточное изображение Im1. Величина и локализация Im1 на оптической оси изменяются при перемещении объекта и зависят от расстояния d1 до объекта Im0. Первое промежуточное изображение Im1 переносится с помощью подвижной положительной линзы (системы линз) L2 (плоскость С) в плоскость D. Положение плоскости D на оси фиксировано, а построенное таким образом второе промежуточное изображение Im2 является действительным. Выполнение условий (1)-(4) (см. формулу изобретения) обеспечивает формирование в плоскости D изображения Im2 с практически постоянным увеличением α±Δα (где Δα - малая величина). Выбор расстояния d2 может осуществляться вручную (при фиксированном положении объекта) или автоматически в режиме автофокусировки (движущийся объект). Второе стабилизированное по величине и локализации изображение Im2 переносится системой линз L3 (плоскость Е) на поверхность фотоприемника, например, ПЗС-матрицы (плоскость G, изображение Im3) для регистрации и последующей компьютерной обработки.
Параксиальный расчет рассматриваемой оптической системы по формулам (1)-(4) для рабочей дистанции 1000 мм<d1<700 мм дает следующие параметры:
- фокусное расстояние первой линзы (группы линз) F1=-588 мм;
- фокусное расстояние второй линзы (группы линз) F2=+294 мм;
- положение 2-го промежуточного изображения d2+d3=882 мм;
- при изменении дистанции до объекта от 700 до 1000 мм расстояние между линзами(группами линз) L1 и L2 (величина d2) варьируется от 188.2 до 102.9 мм.
При указанных параметрах и условиях линейное увеличение второго промежуточного изображения составляет минус 0.62±0.01 при перемещении объекта вдоль оси в пределах рабочей дистанции.
Фокусное расстояние группы линз L3 и положение этой группы на оптической оси определяются конкретными параметрами матрицы фотоприемника и требованиями к финишному увеличению объектива в целом.
Результат работы описанного примера реализации заявленного изобретения представлен на фиг.5а, в то время как на фиг.5б - контрольное изображение, полученное в близких условиях с помощью обычного объектива. Для увеличения глубины резкости использована последовательная покадровая съемка и последующая интеграция изображений с использованием программы Helicon Focus.
Регистрируемая ширина объектов на фиг.5а в соответствии с формулой изобретения практически не зависит от расстояния до объектива. Этот эффект здесь является основой зрительной иллюзии уширения (в общем случае - увеличения размеров) объекта по мере удаления от наблюдателя. В действительности (это легко проверить простым измерением) такого уширения нет. Эффект может быть использован в художественной фотографии, репортажной киносъемке и других аналогичных случаях.
Пример 2
Система фоторегистрации для последующей идентификации личности по радужной оболочке глаз
Рассматриваема система объектив - камера, представленная на фиг.4, может обеспечить фоторегистрацию радужки глаз человека с постоянным увеличением в диапазоне дистанций от 205 до 305 мм. Она, как и в предыдущем примере, не требует масштабирования изображения при его первичной компьютерной обработке, что сокращает время, необходимое для идентификации личности, и способствует повышению качества финишного изображения. Диапазон применений рассматриваемой системы может быть существенно расширен. В частности, она может оказаться полезной в метрике движущихся микрообъектов, в художественной фотографии и других областях.
Здесь входная неподвижная положительная линза L1 (плоскость В) строит первое виртуальное действительное изображение (на чертеже не показано) объекта А. Это изображение трансформируется подвижной отрицательной линзой L2 в мнимое второе промежуточное изображение, локализованное в плоскости D. Пространственное положение плоскости D фиксировано. Выполнение условий (1)-(4) обеспечивает формирование в плоскости D изображения с постоянным увеличением α±Δα (где Δα - малая величина, не зависящая от дистанции до объекта). Второе, в данном случае - мнимое, изображение переносится на матрицу фотоприемника G с помощью третьей линзы L3. Рассчитанные в параксиальном приближении параметры оптической схемы - фокусные расстояния линз и их положение в пространстве - приведены на фиг.4. В скобках указаны размеры, соответствующие максимуму рабочей дистанции до объекта. Расчетное значение увеличения второго промежуточного изображения при изменении рабочей дистанции до объекта в пределах 205-305 мм не выходит за пределы А=+0.2±0.005. Увеличение линзы L3 на отрезке второго промежуточного изображения - изображения на матрице фотоприемника G - равно 1.1. Таким образом, финишное увеличение объекта равно 0.22.
Пример 3
Промышленная реализация системы фоторегистрации, рассмотренной в Примере 2
Образец объектива для системы фоторегистрации радужной оболочки глаз, представленной на фиг.6, рассчитан с использованием данных, приведенных в Примере 2. Он изготовлен в промышленных условиях и испытан. Как и в предыдущем случае, на фиг.5 в скобках приведены параметры, соответствующие максимальной рабочей дистанции. Обозначения SHi и SHi' соответствуют передним и задним главным плоскостям групп линз L1, L2, L3. Объектив ахроматизирован в ближней инфракрасной области спектра.
Система, показанная на фиг.6, содержит три группы линз, вторая из которых установлена с возможностью перемещения вдоль оптической оси, и апертурную диафрагму.
Первая линза первой группы I - положительный мениск 1, обращенный вогнутостью к плоскости объектов.
Вторая линза склеена из положительной двояковыпуклой линзы 2 и отрицательной двояковогнутой линзы 3.
Третья линза - отрицательный мениск 4, обращенный вогнутостью к плоскости объектов.
Вторая группа линз II выполнена склеенной из двух линз - отрицательной двояковогнутой линзы 5 и положительного мениска 6, обращенного выпуклостью к плоскости объектов.
Третья группа линз III также выполнена склеенной из двух линз - положительной двояковыпуклой линзы 7 и отрицательного мениска 8, обращенного вогнутостью к плоскости объектов.
Апертурная диафрагма расположена между второй и третьей группами линз.
Предложенный объектив рассчитан для работы в спектральном интервале длин волн λ=(650÷890) нм. Масштаб изображения β=-0.22x, числовая апертура в пространстве изображений NA'=0,08, диаметр рабочего поля изображения 2Y'=3.3 мм. Рабочий диапазон расстояний от первой поверхности первого компонента до плоскости объектов равен 300÷400 мм. Плоскость изображений расположена на расстоянии 50 мм от последней поверхности третьего компонента и остается постоянной при изменении расстояния до плоскости объектов.
В таблице приведены результаты технических испытаний объектива по Примеру 2, показанного на фиг.6. Испытательный стенд включал последовательно расположенные на оптической скамье светодиодный источник подсветки в спектральном интервале 650±20 нм, прозрачную мирру №4 в качестве объекта фоторегистрации, испытуемый объектив в комплекте с CMOS-камерой с разрешением фотоматрицы 1600×1200 пикселей. Объект последовательно перемещался вдоль оптической оси в пределах рабочей дистанции. Фокусировка объектива и определение увеличения осуществлялись по предельно высокому разрешению изображения мирры. Номинальный масштаб изображения (увеличение) равен 0.22.
Результаты испытаний показывают, что нестабильность масштаба изображения при перемещении объекта вдоль оптической оси в пределах рабочей дистанции не превышает 2.5%.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЙ ПРИЦЕЛ | 2010 |
|
RU2478997C2 |
| Объектив с вынесенным входным зрачком для ближней ИК-области спектра (варианты) | 2023 |
|
RU2820282C1 |
| ШИРОКОУГОЛЬНЫЙ ОБЪЕКТИВ БОЛЬШОЙ ДЛИНЫ С ВЫНЕСЕННЫМ ВХОДНЫМ ЗРАЧКОМ (ВАРИАНТЫ) | 1998 |
|
RU2138068C1 |
| РАДИАЦИОННЫЙ ИНТРОСКОП | 2000 |
|
RU2189031C2 |
| ОПТИЧЕСКАЯ СИСТЕМА ФАЗОВОГО ДАЛЬНОМЕРА | 2000 |
|
RU2187072C2 |
| ОПТИЧЕСКИЙ ИНТЕРФЕЙС ДЛЯ ИОННОГО КВАНТОВОГО РЕГИСТРА | 2022 |
|
RU2807585C1 |
| БИНОКУЛЯРНАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА | 2004 |
|
RU2247419C1 |
| УСТРОЙСТВО И СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ С ОБЕСПЕЧЕНИЕМ УВЕЛИЧЕННОЙ ГЛУБИНЫ ИЗОБРАЖАЕМОГО ПРОСТРАНСТВА (ВАРИАНТЫ) | 2021 |
|
RU2782980C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПЕРЕТЯЖКИ ЛАЗЕРНОГО ПУЧКА | 2008 |
|
RU2411598C2 |
| СОГЛАСУЮЩАЯ ЛАЗЕРНАЯ ОПТИЧЕСКАЯ СИСТЕМА ДЛЯ ОБЕСПЕЧЕНИЯ ПОСТОЯНСТВА РАЗМЕРА И ПОЛОЖЕНИЯ ВЫХОДНОЙ ПЕРЕТЯЖКИ | 2008 |
|
RU2435182C2 |
Изобретение может быть использовано в системах биоидентификации, в частности по радужной оболочке глаза, в метрологии, а также при репортажной и художественной съемке. Оптическая система, реализующая способ, содержит источник импульсного излучения для экспонирования объекта, первую линзу или группу линз, выполненную неподвижной, для коллимации излучения, вторую линзу или группу линз, выполненную подвижной вдоль оптической оси системы, для переноса первого промежуточного изображения в плоскость второго промежуточного изображения, третью линзу или группу линз для переноса второго промежуточного изображения в фиксированную плоскость приемника и приемник изображения. Параметры первой и второй линз или группы линз удовлетворяют соотношениям, приведенным в формуле изобретения. Технический результат - обеспечение автофокусировки и стабилизации масштаба изображения объекта при нахождении или перемещении этого объекта вдоль оптической оси в пределах рабочей дистанции. 2 н. и 6 з.п. ф-лы, 7 ил., 1 табл.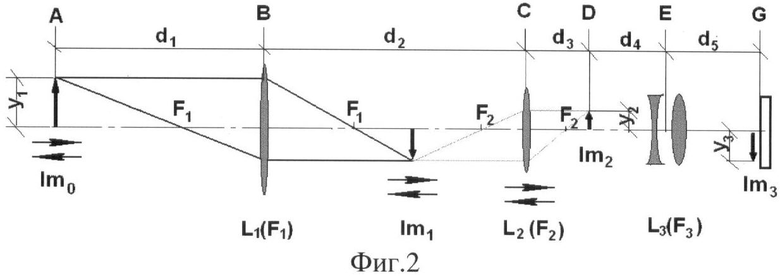
1. Способ оптической обработки изображения, включающий следующие шаги:
экспонирование объекта, перемещающегося или находящегося в пределах рабочей дистанции импульсным излучением,
коллимацию излучения, рассеянного объектом, с помощью первой линзы или группы линз, выполненной неподвижной, и построение первого промежуточного изображения, размер которого и расположение в пространстве определяются расстоянием от объекта до входного зрачка оптической системы;
перенос первого промежуточного изображения в фиксированную в пространстве плоскость второго промежуточного изображения и построение второго промежуточного изображения с помощью второй линзы или группы линз, выполненной подвижной вдоль оптической оси,
перенос второго промежуточного изображения в фиксированную плоскость приемника изображения и построение изображения объекта с помощью третьей линзы или группы линз,
отличающийся тем, что
параметры первой и второй линз или групп линз выбирают в соответствии со следующими соотношениями:
 где
где 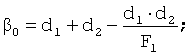
 где
где 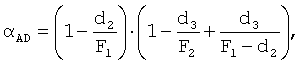
d2+d3=const,
lmax≥d1≥lmin,
где d1 - расстояние от объекта до передней главной плоскости первой линзы или группы линз;
lmax и lmin - пределы изменения рабочей дистанции до объекта;
d2 - расстояние от задней главной плоскости 1-й линзы или группы линз до передней главной плоскости 2-й группы линз;
d3 - расстояние от второго промежуточного изображения до ближайшей главной плоскости 2-й группы линз;
F1 и F2 - фокусные расстояния первой и второй линзы или группы линз;
αAD - линейное увеличение второго промежуточного изображения; и
Δα/αAD - допустимая относительная погрешность финишного линейного увеличения оптической системы;
F1, F2>0, если рефракция положительная;
F1, F2<0, если рефракция отрицательная;
d3>0, если второе промежуточное изображение действительное;
d3<0, если второе промежуточное изображение мнимое.
2. Способ по п.1, отличающийся тем, что экспонирование объекта осуществляют монохроматическим, включая лазерное, излучением.
3. Способ по п.1, отличающийся тем, что первое промежуточное изображение создают мнимым или действительным.
4. Способ по п.1, отличающийся тем, что второе промежуточное изображение создают действительным или мнимым.
5. Способ по п.1, отличающийся тем, что экспонирование объекта осуществляют видимым или инфракрасным излучением.
6. Оптическая система, содержащая источник импульсного излучения для экспонирования объекта, первую линзу или группу линз, выполненную неподвижной, для коллимации излучения, рассеянного объектом, вторую линзу или группу линз, выполненную подвижной вдоль оптической оси системы, для переноса первого промежуточного изображения в плоскость второго промежуточного изображения, третью линзу или группу линз для переноса второго промежуточного изображения в фиксированную плоскость приемника и приемник изображения, отличающаяся тем, что
первая и вторая линзы или группы линз выполнены так, что их параметры удовлетворяют следующим соотношениям:
 где
где 
 где
где 
d2+d3=const,
lmax≥d1≥lmin,
где d1 - расстояние от объекта до передней главной плоскости первой линзы или группы линз;
lmax и lmin - пределы изменения рабочей дистанции до объекта;
d2 - расстояние от задней главной плоскости 1-й линзы или группы линз до передней главной плоскости 2-й группы линз;
d3 - расстояние от второго промежуточного изображения до ближайшей главной плоскости 2-й группы линз;
F1 и F2 - фокусные расстояния первой и второй линзы или группы линз;
αAD - линейное увеличение второго промежуточного изображения; и
Δα/αAD - допустимая относительная погрешность финишного линейного увеличения оптической системы;
F1, F2>0, если рефракция положительная;
F1, F2<0, если рефракция отрицательная;
d3>0, если второе промежуточное изображение действительное;
d3<0, если второе промежуточное изображение мнимое.
7. Система по п.6, отличающаяся тем, что источник излучения выполнен для создания потока монохроматического, включая лазерное, излучения.
8. Система по п.6, отличающаяся тем, что источник излучения выполнен для создания потока видимого или инфракрасного излучения.
| US 7330316 B2, 12.02.2008 | |||
| JP 2008276260 A, 13.11.2008 | |||
| US 2008049334 A1, 28.02.2008 | |||
| US 2006221464 A1, 05.10.2006 | |||
| US 6762888 B1, 13.07.2004 | |||
| ВАРИООБЪЕКТИВ | 2004 |
|
RU2262727C1 |

