Изобретение относится к оптике, а точнее к области проектирования лазерных оптических систем (далее - ЛОС), и может быть использовано для разработки высококачественных оптических систем.
В частности, для преобразования исходной лазерной перетяжки (когда ее размер изменяется в некотором диапазоне) применяется согласующая ЛОС, в которой выходная перетяжка строго согласовывается с последующим элементом установки, размер и положение которого остаются неизменными. Согласующие ЛОС при изменении диаметра входной перетяжки обеспечивают постоянство диаметра и положения выходной перетяжки и их равенство требуемым значениям. В частности, подобные устройства с успехом можно применить в технологических, медицинских (см., например, [1] и подобных им лазерных установках, где требуется облучить заданный размер объекта пучком лазерного излучения строго дозированной порцией энергии, а также в цветных лазерных сканирующих телевизорах, когда необходимо соединять перетяжки лазерных пучков трех основных цветов (например: R, G, В)).
Проблема управления перетяжками рассматривается во многих работах теоретического характера (см., например, [2]-[7]), но она имеет и множество практических применений. Так, например, в цветных лазерных сканирующих телевизорах для правильной цветопередачи изображения диаметры перетяжек всех пучков должны быть строго согласованы и не меняться в процессе эксплуатации или при замене одного из лазеров. Кроме того, часто требуется сохранение постоянства положения выходной перетяжки, т.е. она должна располагаться в одном и том же месте пространства на указанном расстоянии от оптики.
Наиболее близкими по своим признакам к заявляемому изобретению являются идеи, изложенные в [2] и представленные на Фиг.1 и 2, где показаны схемы согласующих лазерных оптических систем, на выходе которых получается перетяжка лазерного пучка заданного размера.
Эти системы состоят из одного или двух компонентов. Они преобразуют исходную перетяжку лазерного пучка переменного размера в перетяжку заданного размера.
Известные согласующие системы неудобны в эксплуатации, т.к. при работе лазера наблюдаются как случайные изменения, так и систематический медленный дрейф размера его исходной номинальной перетяжки. Размер выходной перетяжки также меняется. В этом случае для обеспечения требуемого размера и положения выходной перетяжки через какое-то время необходимо производить новую переустановку элементов установки (лазера и компонентов ЛОС). Причем для обеспечения постоянства параметров выходной перетяжки недостаточно лишь перефокусировать компоненты ЛОС: требуется производить дополнительную операцию - изменение конфигурации всей лазерной установки (смещение лазера и изменение продольных расстояний всех компонентов оптической системы). Это крайне неудобно, т.к. обычно лазер является самым тяжелым и громоздким элементом во всех указанных технологических установках. Кроме того, перемещения компонентов оптической системы могут требоваться настолько большие, что новая конфигурация ЛОС может либо не вписываться в отведенные габариты под установку, либо даже требовать перемещения самого облучаемого объекта. Такую же смену конфигурации ЛОС с изменением всех ее продольных размеров необходимо выполнить и при смене лазера (например, из-за его поломки).
Задача, на решение которой направлено заявляемое изобретение, состоит в том, чтобы разработать схему такой согласующей лазерной системы, которая обладала бы возможностью компенсации изменения размера исходной перетяжки за счет только лишь подвижек компонентов оптической системы.
Технический результат достигается за счет разработки лазерной оптической системы, обеспечивающей постоянство размера и положения выходной перетяжки при вариациях размера входной перетяжки, которая включает в себя лазер, пучок которого с параметром конфокальности Zk имеет исходную перетяжку с переменным в диапазоне [hp,min; hp,max] радиусом при номинальном значении hp0, оптическую систему, состоящую из первого и второго подвижных компонентов, выполненную с возможностью формирования в плоскости облучаемого объекта выходную перетяжку лазерного пучка постоянного размера h′p и на постоянном расстоянии L от исходной перетяжки, при этом в номинальном положении конструктивные параметры: фокусные расстояния первого f1 и второго f2 компонентов системы, а также положение исходной перетяжки Zp0 и дефокусировка Δ0, выбраны таким образом, чтобы удовлетворялись условия заданной длины

и требуемого значения полинома

а при любом ином размере hp исходной перетяжки из диапазона [hp,min; hp,max] конструктивные параметры ЛОС Δ и Zp выбираются таким образом, чтобы обеспечивалось необходимое значение  при продольном увеличении всей ЛОС
при продольном увеличении всей ЛОС  и длина системы L, где параметр Zp определяется из уравнения
и длина системы L, где параметр Zp определяется из уравнения

а параметр Δ вычисляется из соотношения

где  продольное увеличение первого компонента ЛОС вычисляется по формуле
продольное увеличение первого компонента ЛОС вычисляется по формуле
 ,
,
а расстояния в ЛОС равны
d1=f1-Zp; d2=f1+f2+Δ; 
При такой конструкции перемещать лазер или облучаемый объект не нужно, и поэтому нет необходимости периодически проводить трудоемкую смену конфигурации лазерной установки. Параметры ЛОС всегда можно выбрать так, что перемещение компонентов ЛОС не будет чрезвычайно большим. При этом перемещение оптических компонентов схемы - хорошо отработанная и наименее дорогостоящая процедура.
Новизна предлагаемого изобретения заключается в том, что компенсация изменения размера исходной перетяжки за счет небольших подвижек компонентов согласующей оптической системы становится возможной лишь при определенном условии. Это условие накладывает вполне определенную связь конструктивных параметров компонентов согласующей ЛОС. Указанное условие, по-существу, делит все согласующие ЛОС, на системы с согласованной схемотехникой, в которых указанная связь конструкционных параметров ЛОС выполняется, и с несогласованной схемотехникой - все прочие системы, в которых указанная связь конструкционных параметров ЛОС не выполняется. Лишь согласованные системы в процессе эксплуатации установки могут играть роль согласующих и поддерживать размер и положение выходной перетяжки постоянными при вариациях размера исходной перетяжки.
Далее существо заявляемого изобретения поясняется с привлечением графических материалов.
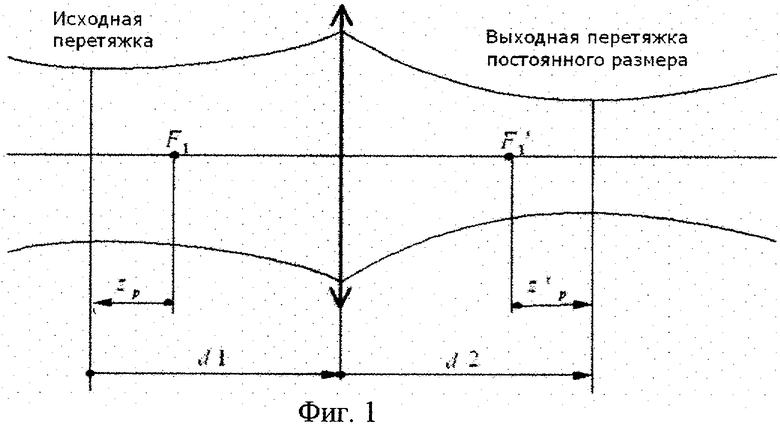
На Фиг.1 представлена известная из уровня техники однокомпонентная лазерная согласующая оптическая система,
где Zp - расстояние от переднего фокуса F1 оптической системы до входной перетяжки;
Z′p - расстояние от заднего фокуса F′1 оптической системы до выходной перетяжки;
F1 - передний фокус оптической системы;
F′1 - задний фокус оптической системы;
d1 - расстояние от входной перетяжки лазерного пучка до оптической системы;
d2 - расстояние от оптической системы до выходной перетяжки.
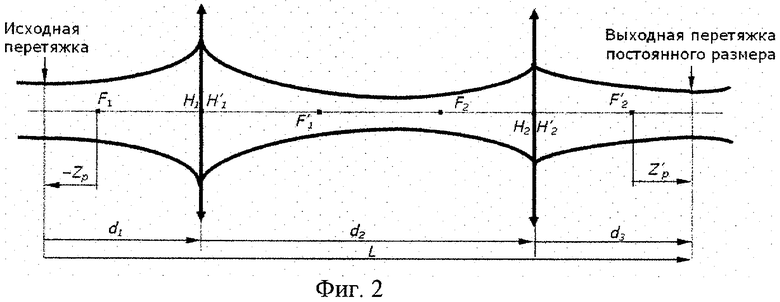
На Фиг.2 представлена известная из уровня техники двухкомпонентная лазерная согласующая оптическая система,
где Zp - расстояние от переднего фокуса F1 первого компонента оптической системы до входной перетяжки;
Z′p - расстояние от заднего фокуса F′2 второго компонента оптической системы до выходной перетяжки;
F1 - передний фокус первого компонента оптической системы;
F′1 - задний фокус первого компонента оптической системы;
F2 - передний фокус второго компонента оптической системы;
F′2 - задний фокус второго компонента оптической системы;
d1 - расстояние от входной перетяжки лазерного пучка до первого компонента оптической системы;
d2 - расстояние между компонентами оптической системы;
d3 - расстояние от второго компонента оптической системы до выходной перетяжки;
L - расстояние между входной и выходной перетяжками (длина оптической системы);
Δ - расстояние между задним фокусом первого компонента и передним фокусом второго компонента оптической системы.
На Фиг.3 представлена заявляемая лазерная согласующая оптическая система с переменным продольным увеличением,
где Zp0 - исходное расстояние от переднего фокуса F1 первого компонента оптической системы до входной перетяжки;
Z′p0 - исходное расстояние от заднего фокуса F′2 второго компонента оптической системы до выходной перетяжки;
F1 - передний фокус первого компонента оптической системы;
F′1 - задний фокус первого компонента оптической системы;
F2 - передний фокус второго компонента оптической системы;
F′2 - задний фокус второго компонента оптической системы;
d10 - исходное расстояние от входной перетяжки лазерного пучка до первого компонента оптической системы;
d20 - исходное расстояние между компонентами оптической системы;
d30 - исходное расстояние от второго компонента оптической системы до выходной перетяжки;
L - расстояние между входной и выходной перетяжками (длина оптической системы);
Δ0 - исходное расстояние между задним фокусом первого компонента и передним фокусом второго компонента оптической системы.
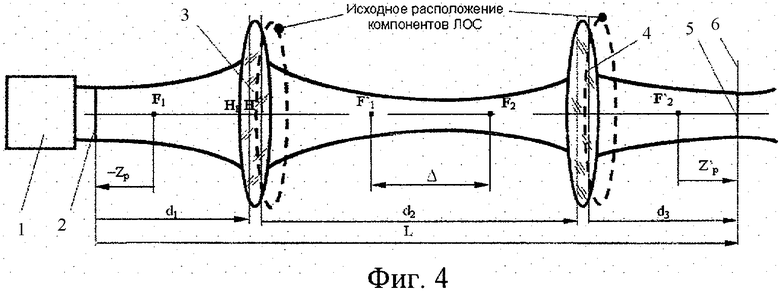
На Фиг.4 представлена заявленная лазерная согласующая оптическая система с переменным продольным увеличением и положение выходной перетяжки при необходимом перемещении компонентов 2 и 3 системы при уменьшении номинального диаметра исходной перетяжки на 5%. Исходное положение компонентов показано пунктиром. Другие обозначения:
Zp - расстояние от переднего фокуса F1 первого компонента оптической системы до входной перетяжки;
Z′p - расстояние от заднего фокуса F′2 второго компонента оптической системы до выходной перетяжки;
F1 - передний фокус первого компонента оптической системы;
F′1 - задний фокус первого компонента оптической системы;
F2 - передний фокус второго компонента оптической системы;
F′2 - задний фокус второго компонента оптической системы;
d1 - расстояние от входной перетяжки лазерного пучка до первого компонента оптической системы;
d2 - расстояние между компонентами оптической системы;
d3 - расстояние от второго компонента оптической системы до выходной перетяжки;
L - расстояние между входной и выходной перетяжками (длина оптической системы);
Δ - расстояние между задним фокусом первого компонента и передним фокусом второго компонента оптической системы.
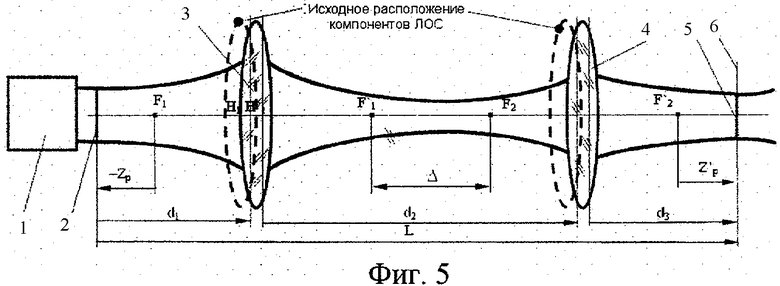
На Фиг.5 показана заявляемая лазерная согласующая оптическая система с переменным продольным увеличением и положение выходной перетяжки при необходимом перемещении компонентов 2 и 3 системы при увеличении номинального диаметра исходной перетяжки на 4%.
Исходное положение компонентов показано пунктиром. Другие обозначения:
Zp - расстояние от переднего фокуса F1 первого компонента оптической системы до входной перетяжки;
Z′p - расстояние от заднего фокуса F′2 второго компонента оптической системы до выходной перетяжки;
F1 - передний фокус первого компонента оптической системы;
F′1 - задний фокус первого компонента оптической системы;
F2 - передний фокус второго компонента оптической системы;
F′2 - задний фокус второго компонента оптической системы;
d1 - расстояние от входной перетяжки лазерного пучка до первого компонента оптической системы;
d2 - расстояние между компонентами оптической системы;
d3 - расстояние от второго компонента оптической системы до выходной перетяжки;
L - расстояние между входной и выходной перетяжками (длина оптической системы);
Δ - расстояние между задним фокусом первого компонента и передним фокусом второго компонента оптической системы.
В представленной на Фиг.3 лазерной согласующей оптической системе с переменным продольным увеличением обеспечивается постоянство размера и положения выходной перетяжки лазерного пучка при вариациях размера входной перетяжки. Система включает лазер 1, пучок которого имеет исходную перетяжку 2 с параметром конфокальности Zk, согласующую оптическую систему, состоящую из первого 3 и второго 4 компонентов и формирующую в плоскости объекта 5 перетяжку 6 выходного лазерного пучка.
В номинальном состоянии размер (радиус) исходной перетяжки равен hp0. В процессе эксплуатации размер перетяжки может меняться в небольшом диапазоне - от минимального hp,min до максимального hp,max. Требуемый размер (радиус) выходной перетяжки h′p, поэтому номинальное продольное увеличение ЛОС - известно и равно α0=(h′p/hp0)2. Длина системы от исходной до выходной перетяжки равна L и сохраняется постоянной.
В номинальном положении конструктивные параметры: фокусные расстояния f1 первого и f2 второго компонентов системы, а также положение исходной перетяжки Zp0 и дефокусировка Δ0, выбираются так, чтобы удовлетворялись условия заданной длины системы
и требуемого значения полинома
Расположение компонентов ЛОС зависит от выбора рабочей точки (т.е. совместным заданием двух параметров: Δ и Zp), которая определяет как значение полинома

так и длину системы L.
Для существования возможности указанного выбора параметров ЛОС: f1, f2, Zp0 и Δ0 необходимо, чтобы подкоренное выражение было бы положительным. При Р<1 это достигается за счет выбора  а при P>1 это условие выполняется для любых Zp. Прямой расчет выражения (1) при известных Zk и Р за счет соответствующего выбора f1 и Zp (Zp<-Zp,kr при P<1) можно обеспечить любую положительную длину системы L. При этом
а при P>1 это условие выполняется для любых Zp. Прямой расчет выражения (1) при известных Zk и Р за счет соответствующего выбора f1 и Zp (Zp<-Zp,kr при P<1) можно обеспечить любую положительную длину системы L. При этом  .
.
Кроме выполнения этих условий, необходимо также обеспечить физическую реализуемость ЛОС, когда все продольные расстояния: d1 (от входной перетяжки лазерного пучка до первого компонента)  ; d2 (между компонентами)
; d2 (между компонентами)  , и d3 (от второго компонента до выходной перетяжки)
, и d3 (от второго компонента до выходной перетяжки)  были бы больше нуля.
были бы больше нуля.
Для этого достаточно, чтобы Zp<fl при d1>0. При этом расстояния d2>0, d3>0 автоматически.
Таким образом, конструктивных параметров ЛОС всегда можно выбрать так, чтобы обеспечить выполнение условий ее физической реализуемости и условий (1), (2) для обеспечения постоянства размера и положения выходной перетяжки. При этом в номинальном положении продольные расстояния в лазерной согласующей оптической системе (Фиг.3) будут таковы
 ;
; 
 .
.
Представленная на Фиг.3 оптическая схема согласующей лазерной системы обеспечивает получение выходной перетяжки постоянного диаметра 1 мм. Кроме того, система поддерживает постоянство длины от исходной перетяжки лазера до плоскости облучения (выходной перетяжки). Она постоянна и равна 500 мм.
При любом ином размере hp исходной перетяжки из диапазона [hp,min, hp,max] конструктивные параметры Δ и Zp выбираются так, чтобы обеспечить условия (1) (сохранения постоянства положения выходной перетяжки) и (2) (для получения необходимого значения полинома  и, следовательно, обеспечения постоянства размера выходной перетяжки).
и, следовательно, обеспечения постоянства размера выходной перетяжки).
При этом дефокусировка исходной перетяжки Zp определяется из решения уравнения
 ,
,
где Zk - известно, а параметры ЛОС f, f2 - выбраны ранее.
Затем вычисляется параметр Δ из соотношения

Найденные Δ и Zp однозначно определяют расстояния в лазерной согласующей оптической системе (Фиг.4 и 5), которые для произвольной исходной перетяжки будут равны
d1=f1-Zp; d2=f1+f2+Δ;
При любом изменении номинального диаметра первый и второй компоненты согласующей системы перемещаются так, что обеспечивается постоянство размера и положения выходной перетяжки (облучаемого объекта) относительно исходной перетяжки (лазера).
Предпочтительный вариант применения изобретения для согласования размера и положения выходной перетяжки при использовании лазеров с большим Zk состоит в выборе диапазона изменения параметра Р вблизи значения Р=1. Ниже приведен пример расчета согласующей ЛОС с длиной L=500 мм.
Pmax=1.210 Pmin=0.999
L=500.0 мм
В настоящее время наиболее эффективное промышленное применение связано с использованием изобретения в системах лазерных сканирующих телевизоров для согласования и поддержания постоянства размера и расположения выходной перетяжки на дефлекторе заданной апертуры. Для отличной цветопередачи изображения лазерного телевизора это свойство поддерживается одновременно в трех независимых каналах (R, G, В).
ИСТОЧНИКИ ИНФОРМАЦИИ
[1]. Патент РФ №2090157.
[2]. Пахомов И.И., Цибуля А.Б. Расчет оптических систем лазерных приборов. - М.: Радио и связь, 1986. - 140 с. (также см. Pakhomov I.I., Tsibulya A.B. Computational Methods for Laser Optical Systems Design // Journal of Soviet Laser Research. - V.9. - No.3. - 1998. - New York. - P.321-429).
[3]. Джерард А., Берч Дж.М. Введение в матричную оптику: Пер. с англ. / Под ред. В.В.Коробкина. - М.: Мир, 1978. - 340 с.
[4]. Заказнов Н.П., Кирюшин С.И., Кузичев В.И. Теория оптических систем. - М.: Машиностроение, 1992. - 447 с.
[5]. Пахомов И.И. Расчет преобразования лазерного пучка в оптических системах. - М.: МГТУ им. Н.Э.Баумана, 1998. - 54 с.
[6]. Ю.В.Богданов, В.Н.Сорокин. Оптимизация четырехзеркального резонатора для титанового лазера // Квантовая электроника, 1995, 22 (4), 350-356.
[7]. В.И.Балыкан, В.С.Летохов. Лазерная оптика нейтральных атомных пучков // Успехи физических наук, январь 1990, Том 160, Вып.1.
[8]. Патент РФ №2149435.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПЕРЕТЯЖКИ ЛАЗЕРНОГО ПУЧКА | 2008 |
|
RU2411598C2 |
| СПОСОБ ИЗМЕНЕНИЯ ДИАМЕТРА ПЕРЕТЯЖКИ ВЫХОДНОГО ЛАЗЕРНОГО ПУЧКА НА ФИКСИРОВАННОМ РАССТОЯНИИ ОТ ЛАЗЕРА | 2012 |
|
RU2488861C1 |
| Способ для продольного перемещения перетяжки лазерного гауссова пучка постоянного диаметра без перемещения компонентов оптической системы (варианты) | 2019 |
|
RU2708549C1 |
| ЛИНЕЙКА ЛАЗЕРНЫХ ДИОДОВ | 1999 |
|
RU2166822C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ В ВИДЕ КВАЗИПАРАЛЛЕЛЬНОГО ПУЧКА | 2007 |
|
RU2393516C2 |
| ГОЛОГРАФИЧЕСКИЙ ПРИЦЕЛ И УСТРОЙСТВО ЗАПИСИ ГОЛОГРАММЫ ПРИЦЕЛЬНОГО ЗНАКА | 2007 |
|
RU2352890C1 |
| ЛАЗЕРНАЯ ПРОЕКЦИОННАЯ СИСТЕМА ОТОБРАЖЕНИЯ ТЕЛЕВИЗИОННОЙ ИНФОРМАЦИИ (ВАРИАНТЫ) | 1995 |
|
RU2104617C1 |
| СПОСОБ ИЗМЕНЕНИЯ ДЛИНЫ ФОКУСИРОВКИ БЕССЕЛЕВА ПУЧКА 0-ГО ПОРЯДКА | 2019 |
|
RU2721085C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ВЫСОКОРАЗРЕШАЮЩЕГО ЛАЗЕРНОГО ПРИНТЕРА | 2003 |
|
RU2256944C2 |
| Оптическая система дистанционной передачи энергии на базе мощных волоконных лазеров | 2021 |
|
RU2788422C1 |
Изобретение относится к оптике, а точнее к лазерным оптическим системам. Согласующая лазерная оптическая система выполнена с возможностью обеспечения постоянства размера и положения выходной перетяжки при вариациях размера входной перетяжки и включает в себя лазер, пучок которого с параметром конфокальности Zk имеет исходную перетяжку с переменным в диапазоне [hp,min; hp,max] радиусом при номинальном значении hp0, а также оптическую систему, состоящую из первого и второго подвижных компонентов, выполненную с возможностью формирования в плоскости облучаемого объекта выходной перетяжки лазерного пучка постоянного размера h′p и на постоянном расстоянии L от исходной перетяжки. Технический результат - обеспечение постоянства размера и положения выходной перетяжки относительно исходной перетяжки. 5 ил.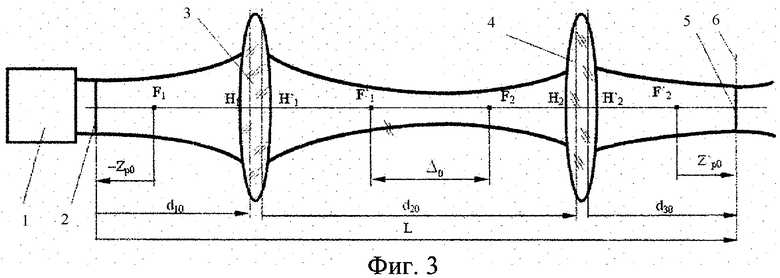
Согласующая лазерная оптическая система (ЛОС), выполненная с возможностью обеспечения постоянства размера и положения выходной перетяжки при вариациях размера входной перетяжки, включающая в себя лазер, пучок которого с параметром конфокальности Zk имеет исходную перетяжку с переменным в диапазоне [hp,min; hp,max] радиусом при номинальном значении hp0, а также оптическую систему, состоящую из первого и второго подвижных компонентов, выполненную с возможностью формирования в плоскости облучаемого объекта выходной перетяжки лазерного пучка постоянного размера h'p и на постоянном расстоянии L от исходной перетяжки, при этом в номинальном положении конструктивные параметры оптической системы имеют следующие значения: фокусные расстояния первого f1 и второго f2 компонентов системы, а также положение исходной перетяжки Zp и дефокусировка Δ выбраны таким образом, чтобы удовлетворялись условия заданной длины:
и требуемого значения полинома

где Zp0 - положение исходной перетяжки в номинальном положении, α0=(h'p/hp0)2, Δ0 - дефокусировка в номинальном положении, а при любом ином размере hp исходной перетяжки из диапазона [hp,min, hp,max] конструктивные параметры ЛОС Δ и Zp выбираются таким образом, чтобы обеспечивалось необходимое значение при  и длине системы L, причем параметр Zp определяется из уравнения:
и длине системы L, причем параметр Zp определяется из уравнения:

а параметр Δ вычисляется из соотношения

где  продольное увеличение первого компонента ЛОС вычисляется по формуле
продольное увеличение первого компонента ЛОС вычисляется по формуле  , а расстояния в ЛОС равны:
, а расстояния в ЛОС равны:
d1=f1-Zp; d2=f1+f2+Δ; 
| Пахомов И.И., Цибуля А.Б | |||
| Расчет оптических систем лазерных приборов | |||
| - М.: Радио и связь, 1986 | |||
| ОПТИЧЕСКАЯ СИСТЕМА ДЛЯ КОРРЕКЦИИ ФОРМЫ ПРЯМОУГОЛЬНОГО ЛАЗЕРНОГО ПУЧКА | 1998 |
|
RU2149435C1 |
| US 7199330 В2, 03.04.2007 | |||
| DE 102004015148 А1, 20.10.2005. | |||

