Область техники, к которой относится изобретение
Настоящее изобретение относится к твердотельному устройству съемки изображения и способу передачи данных для считывания данных снятого изображения из твердотельного элемента съемки изображения, такого как датчик изображения типа СMOS (КМОП, комплементарный металлооксидный полупроводник), и передачи данных снятого изображения, и, кроме того, относится к устройству съемки изображения, в котором используется твердотельный элемент съемки изображения, такой как датчик изображения типа КМОП.
В настоящей заявке заявлен приоритет заявки №2006-182030 на японский патент, поданной 30 июня 2006, содержание которой приведено данной заявке в качестве ссылочного материала.
Уровень техники
В последние годы датчики изображения, получаемые в результате обработки изготовления полупроводников типа КМОП (ниже называются датчиками изображения КМОП), получили широкое распространение в практическом использовании. Датчик изображения КМОП может последовательно считывать сигналы пикселей, получаемые из отдельных единичных пикселей 21, которые расположены двумерно, например, в виде m столбцов × n строк. В частности, в датчике изображения КМОП m линий сигнала столбцов для передачи сигналов пикселей, генерируемых n модулями пикселей 21, расположены в вертикальном направлении (называется направлением столбцов), и n линий горизонтального выбора для выбора m модулей пикселей 21 в горизонтальном направлении расположены в виде сетки. Датчик изображения КМОП представляет собой устройство съемки изображения для последовательного сканирования на взаимно однозначной основе модулей пикселей 21 в m столбцах и n строках через линии сигнала столбцов и линии горизонтального выбора для генерирования сигнала изображения.
Для съемки с помощью такого устройства съемки изображения высококачественных изображений на основе, например, стандарта "full HD" (полная высокая четкость) или тому подобного требуется выводить большее количество элементов данных пикселей в единицу времени из датчика изображения КМОП. Таким образом, датчик изображения КМОП должен выводить элементы данных пикселей с более высокой скоростью. В случае съемки сигналов изображения с высокой скоростью обработки пикселей, как описано выше для обеспечения вывода данных наружу при скорости передачи, аналогичной обычной скорости передачи, требуется увеличить количество выходных выводов устройства съемки изображения. Таким образом, возникает проблема, поскольку увеличиваются размеры схемы.
Для решения этой проблемы можно рассмотреть возможность увеличения скорости считывания элементов данных пикселей из отдельных модулей пикселей 21 датчика изображения КМОП и вывода считанных сигналов изображения с высокой скоростью наружу через малое количество выходных выводов. Здесь, в случае когда скорость считывания сигналов пикселей из отдельных модулей 21 пикселей просто увеличивают, повышается потребление энергии датчиком изображения КМОП и увеличиваются шумы, генерируемые во время считывания.
Для снижения отрицательных эффектов, возникающих при таком увеличении скорости считывания, в публикации №2005-86224, находящейся на экспертизе заявки на японский патент, рассматривается твердотельное устройство съемки изображения, в котором предусматривается генерирование высокой тактовой частоты из низкой тактовой частоты, считывание элементов данных пикселя из четырех пикселей датчика изображения КМОП на основе низкой тактовой частоты и вывод элементов данных пикселя через множество дифференциальных каналов передачи наружу на основе высокой тактовой частоты.
В твердотельном устройстве съемки изображения, предложенном в патентном документе 1, описанном выше, датчик изображения КМОП работает на основе низкой тактовой частоты, и схема на стороне выхода, предназначенная для вывода элементов данных пикселя, работает на основе высокой тактовой частоты. Таким образом, при сравнении со случаем, когда все блоки обработки во всем устройстве работают с высокой скоростью, можно обеспечить уменьшение шумов, генерируемых в датчике изображения КМОП, и можно снизить потребление электроэнергии.
Сущность изобретения
Техническая задача
Твердотельное устройство съемки изображения, описанное в указанном выше патентном документе 1, выполняет передачу сигналов изображения путем управления дифференциальными усилителями, количество которых такое же, как и в случае, когда данные изображения снимают и передают с высокой разрешающей способностью и с высокой частотой следования кадров, даже в случае, когда передают сигналы изображения в формате с низкой разрешающей способностью и данные с малой частотой следования кадров. Таким образом, при сравнении с твердотельным устройством съемки изображения, которое выполняет все операции обработки от считывания сигналов пикселей до вывода сигналов изображения наружу на основе количества импульсов тактовой частоты с относительно низкой частотой, происходит увеличения потребления электроэнергии.
Техническую задачу настоящего изобретения рассматривают с учетом описанных выше текущих обстоятельств, и она состоит в том, чтобы обеспечить твердотельное устройство съемки изображения, способ передачи данных и устройство съемки изображения для передачи данных снятого изображения, считываемых из твердотельного элемента съемки изображения, наружу из твердотельного элемента съемки изображения при пониженном потреблении электрической энергии.
Вариант воплощения твердотельного устройства съемки изображения в соответствии с настоящим изобретением включает в себя твердотельный элемент съемки изображения, который считывает на основе первой тактовой частоты элементы данных снятого изображения из модулей пикселей, которые расположены двумерно; второй модуль генерирования тактовой частоты, который генерирует вторую тактовую частоту, имеющую более высокую рабочую частоту, чем первая тактовая частота; модуль обработки компоновки, который преобразует компоновку элементов данных снятого изображения, считываемых из твердотельного элемента съемки изображения, в последовательности битовых данных; модуль передачи данных, который включает в себя множество дифференциальных усилителей для передачи последовательности битовых данных, компоновка которых была изменена с помощью модуля обработки компоновки, через множество дифференциальных каналов передачи наружу, причем дифференциальные усилители передают последовательности битовых данных наружу на основе второй тактовой частоты; и модуль управления, который управляет дифференциальными усилителями, количество которых пропорционально скорости передачи, с которой элементы данных снятого изображения передают наружу.
Кроме того, вариант воплощения способа передачи данных в соответствии с настоящим изобретением для вывода через множество дифференциальных каналов передачи наружу элементов данных изображения, считываемых из твердотельного элемента съемки изображения, в котором единичные пиксели расположены двумерно, включает в себя этапы, на которых: преобразуют компоновку элементов данных снятого изображения, считываемых из твердотельного элемента съемки изображения, в заданное количество последовательностей битовых данных; генерируют вторую тактовую частоту, имеющую более высокую рабочую частоту, чем первая тактовая частота; управляют дифференциальными усилителями, количество которых пропорционально скорости передачи, при которой элементы данных снятого изображения выводят наружу; и передают для отдельных работающих дифференциальных усилителей каждую из последовательностей битовых данных с измененной компоновкой наружу на основе второй тактовой частоты.
Кроме того, вариант воплощения устройства съемки изображения в соответствии с настоящим изобретением включает в себя блок обработки снятого изображения, который считывает на основе первой тактовой частоты элементы данных снятого изображения из твердотельного элемента съемки изображения, в котором единичные пиксели расположены двумерно, и блок обработки изображения, который выполняет заданную обработку данных для элементов данных снятого изображения, считываемых из блока обработки съемки изображения. Блок обработки съемки изображения включает в себя второй модуль генерирования тактовой частоты, который генерирует вторую тактовую частоту, имеющую более высокую рабочую частоту, чем первая тактовая частота; модуль обработки компоновки, который изменяет компоновку элементов данных снятого изображения, считанных из твердотельного элемента съемки изображения, с получением заданного количества последовательностей битовых данных; модуль передачи данных, который включает в себя множество дифференциальных усилителей для передачи последовательности битовых данных, компоновка которых была изменена с помощью модуля обработки компоновки, через множество дифференциальных каналов передачи наружу, причем дифференциальные усилители передают последовательности битовых данных наружу на основе второй тактовой частоты; и модуль управления, который управляет дифференциальными усилителями, количество которых пропорционально скорости передачи, при которой элементы данных снятого изображения передают в блок обработки изображения.
В настоящем изобретении твердотельный элемент съемки изображения работает на основе первой тактовой частоты, и схема на стороне выхода для вывода данных изображения работает на основе второй тактовой частоты, имеющей высокую частоту. Таким образом, в настоящем изобретении, поскольку большее количество элементов данных снятого изображения выводят за единицу времени без увеличения скорости обработки элементов данных снятого изображения, выполняемой твердотельным элементом съемки изображения, шумы, генерируемые внутри твердотельного элемента съемки изображения, могут быть уменьшены в случае, когда выводят данные, имеющие высокое качество изображения.
Кроме того, в настоящем изобретении управляют дифференциальными усилителями, количество которых пропорционально скорости передачи, с которой элементы данных передают наружу, и отдельные последовательности битовых данных передают наружу с помощью управляемых дифференциальных усилителей на основе второй тактовой частоты.
Как описано выше в настоящем изобретении, поскольку элементы данных снятого изображения передают через дифференциальные каналы передачи наружу, можно уменьшить ненужное излучение, возникающее во время передачи данных. Кроме того, поскольку включают минимально необходимое количество дифференциальных усилителей в соответствии с качеством изображения данных изображения, данные снятого изображения можно передавать с уменьшенным потреблением электроэнергии, независимо от качества изображения данных снятого изображения, предназначенных для передачи.
Дополнительные технические цели настоящего изобретения и конкретные компоновки, обеспечиваемые настоящим изобретением, будут более понятными из описанных ниже вариантов воплощения со ссылкой на чертежи.
Краткое описание чертежей
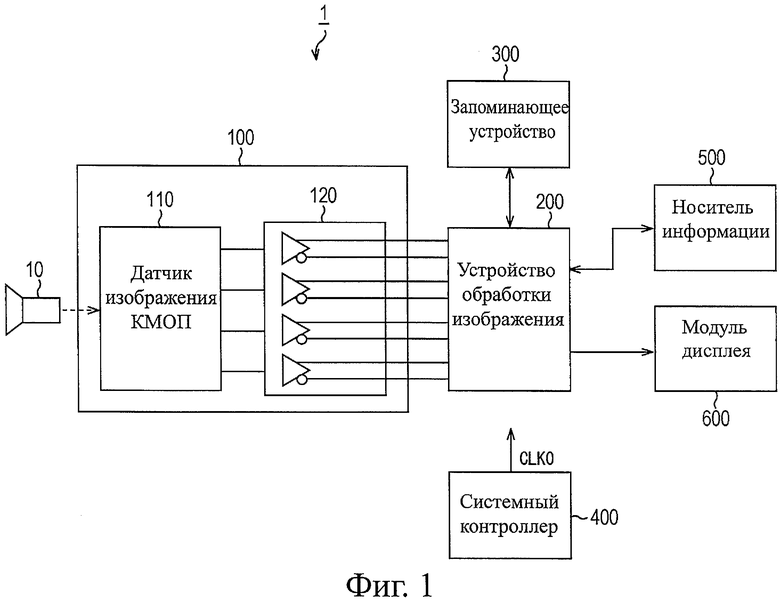
На фиг.1 показана блок-схема, схематично представляющая конфигурацию видеокамеры 1.
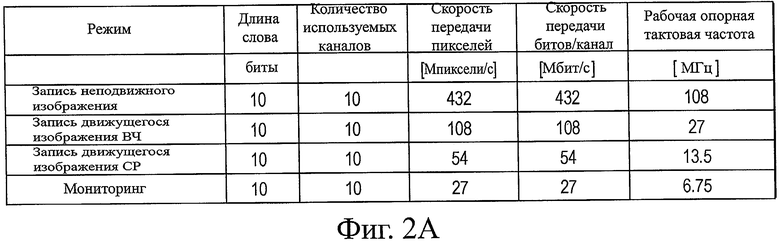
На фиг.2А и 2В представлены иллюстрации, представляющие изменения операций, выполняемых внутри видеокамер, в соответствии с режимом съемки изображения.
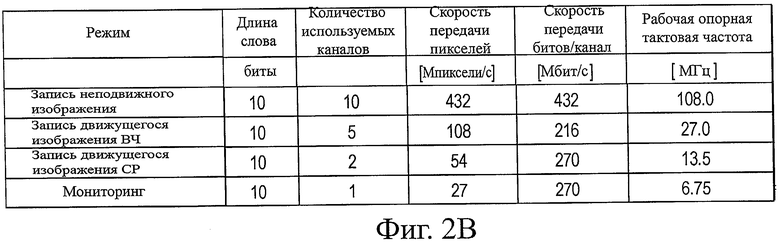
На фиг.3 показана иллюстрация, представляющая компоновку печатной платы датчика изображения КМОП.
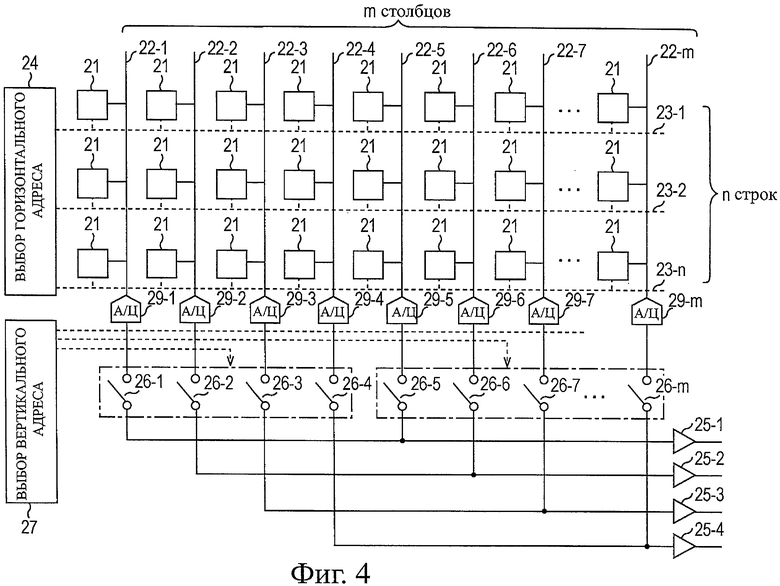
На фиг.4 показана иллюстрация, представляющая компоновку печатной платы датчика изображения КМОП.
На фиг.5 показана схема, представляющая конфигурацию устройства съемки изображения и устройства обработки изображения.
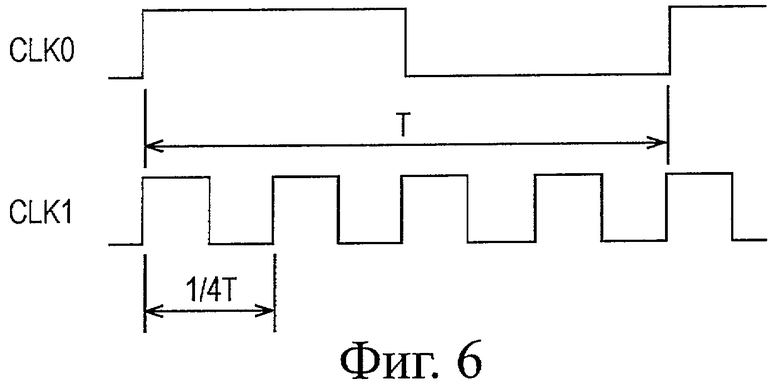
На фиг.6 показана иллюстрация, представляющая опорную тактовую частоту CLK0 и тактовую частоту CLK1 для высокой скорости.
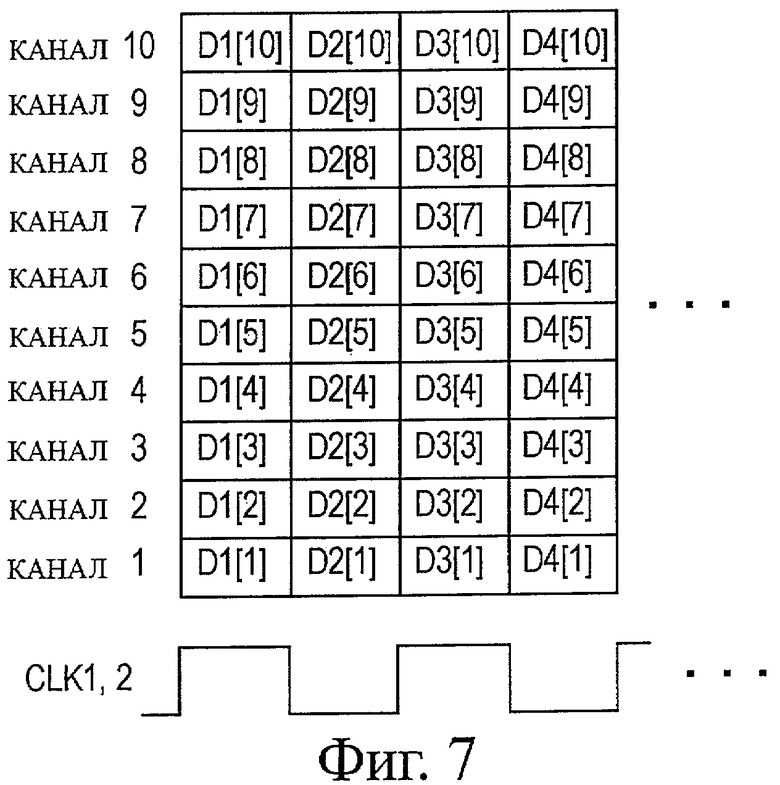
На фиг.7 показана иллюстрация, представляющая обработку дифференциальной передачи битовых данных в режиме съемки неподвижного изображения.
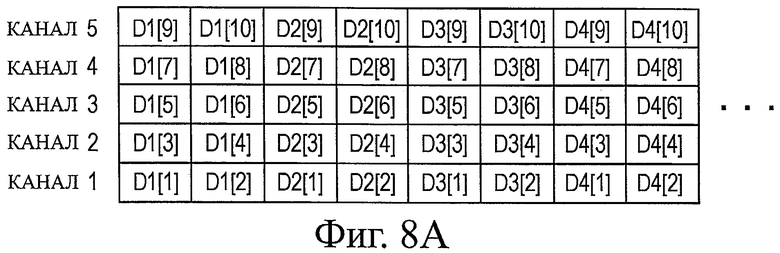
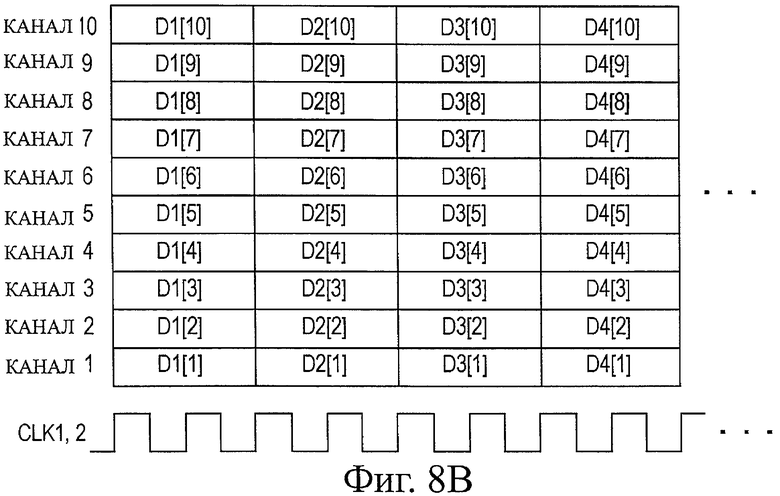
На фиг.8А и 8В показаны иллюстрации, представляющие обработку дифференциальной передачи битовых данных в режиме записи движущегося изображения HD (ВЧ, высокой четкости).
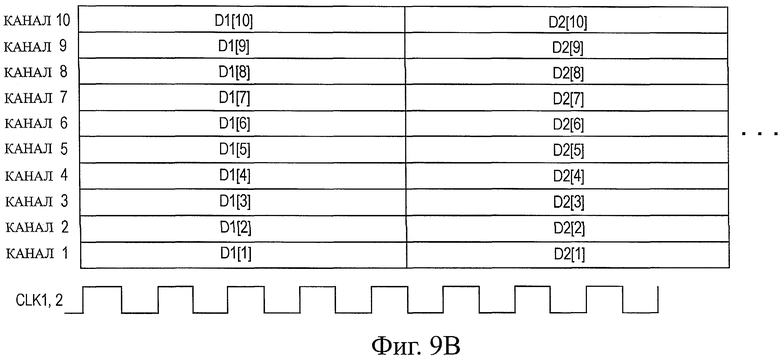
На фиг.9А и 9В показаны иллюстрации, представляющие обработку дифференциальной передачи битовых данных в режиме мониторинга.
Подробное описание изобретения
Ниже со ссылкой на чертежи будут подробно описаны лучшие способы выполнения настоящего изобретения. В описанных ниже вариантах воплощения настоящее изобретение применяют, например, в устройстве съемки изображения (ниже просто называется видеокамерой 1), предназначенном для съемки изображения предмета, используя твердотельный элемент съемки изображения.
Видеокамера 1 включает в себя, как показано на фиг.1, модуль 10 объектива, устройство 100 съемки изображения, состоящее из датчика 110 изображения КМОП (комплементарный металлоокисидный полупроводник) и блока 120 вывода данных, устройство 200 обработки изображения, запоминающее устройство 300, системный контроллер 400, носитель 500 записи и модуль 600 дисплея.
В модуле 10 объектива предусмотрены фокусирующая линза, линза изменения масштаба изображения, диафрагма и часть привода для привода этих линз. Кроме того, модуль 10 объектива принимает свет изображения предмета для формирования изображения на принимающей свет поверхности датчика 110 изображения КМОП.
Устройство 100 съемки изображения состоит из датчика 110 изображения КМОП, который принимает свет изображения предмета для генерирования данных снятого изображения, и блока 120 вывода данных, который выводит данные снятого изображения, генерируемые датчиком 110 изображения КМОП, в устройство 200 обработки изображения.
Датчик 110 изображения КМОП имеет единичные пиксели 21, которые расположены двумерно на его принимающей свет поверхности, и каждый из единичных пикселей 21 выполняет фотоэлектрическое преобразование сфокусированного света для вывода электрического сигнала. Затем датчик 110 изображения КМОП считывает электрический сигнал из каждого из единичных пикселей 21 и преобразует считанный электрический сигнал, например, в элементы данных пикселя по 10 битов. Кроме того, датчик 110 изображения КМОП включает в себя усилители для реализации четырех параллельных выходов электрических сигналов в линиях столбцов. То есть датчик 110 изображения КМОП выводит четыре элемента параллельных данных пикселя за единицу времени.
Блок 120 выхода данных включает в себя выходные выводы для, в сумме, десяти каналов, предназначенных для вывода битовых данных в последовательном формате. Блок 120 вывода данных преобразует четыре параллельных элемента данных пикселя, выводимых из датчика 110 изображения КМОП, в последовательности битовых данных в последовательном формате, и эти последовательности битовых данных в последовательном формате выводят через отдельные каналы. То есть устройство съемки 100 изображения передает из блока 120 вывода данных в устройство 200 обработки изображения элементы данных снятого изображения как последовательности битовых данных в последовательном формате.
Устройство 200 обработки изображения преобразует компоновку последовательности битовых данных в последовательном формате, переданных из устройства 100 съемки изображения в элементы данных пикселя в единичных пикселях. Кроме того, устройство 200 обработки изображения компонует элементы данных пикселя двумерно для генерирования данных изображения для каждого экрана и передает сгенерированные данные изображения в запоминающее устройство 300 таким образом, что данные изображения сохраняют в запоминающем устройстве 300.
Кроме того, устройство 200 обработки изображения считывает данные изображения, временно сохраненные в запоминающем устройстве 300, выполняет такую регулировку, как гамма-коррекция и управление балансом белого для считанных данных изображения, и преобразует формат данных изображения в формат носителя записи, дисплея или тому подобное. Кроме того, устройство 200 обработки изображения передает данные изображения в носитель 500 записи и в модуль 600 дисплея. Как описано выше, данные изображения, снятые видеокамерой 1, сохраняют на носителе 500 записи, таком как, например, жесткий диск или запоминающее устройство типа флеш, и отображают в модуле 600 дисплея, который состоит из LCD (ЖКД, жидкокристаллический дисплей), органической EL (ЭЛ, электролюминесценция) или тому подобного.
Системный контроллер 400 передает опорную тактовую частоту CLK0 в каждое устройство видеокамеры 1. Следует отметить, что, как показано на фиг.2А и 2В, опорная тактовая частота CLK0 изменяется в соответствии с режимом съемки изображения. В частности, системный контроллер 400 генерирует опорную тактовую частоту CLK0 с высокой рабочей частотой в случае высокой скорости считывания данных пикселей изображения и генерирует опорную тактовую частоту CLK0 с низкой рабочей частотой в случае низкой скорости считывания данных пикселей снятого изображения.
Кроме того, системный контроллер 400 управляет этими модулями обработки. В частности, в видеокамере 1 в соответствии с данным вариантом воплощения системный контроллер 400 применяет к блоку 120 вывода данных инструкцию управления, соответствующую режиму съемки изображения, выбранному во время съемки изображения предмета, и переключает количество каналов для выходных выводов, которые должны использоваться, в блоке 120 вывода данных.
Здесь, в этом варианте воплощения, например, имеется всего четыре типа режимов съемки изображения, которые определяют путем классификации в соответствии с частотой пикселей (мегапикселей/с). То есть эти режимы съемки изображения представляют собой режим записи неподвижного изображения (432 [мегапикселей/с]), режим записи движущегося изображения ВЧ (высокой четкости) (108 [мегапикселей/с]), режим записи движущегося изображения SD (CP, стандартная разрешающая способность) (54 [мегапикселей/с]) и режим мониторинга (27 [мегапикселей/с]) в убывающем порядке количества элементов данных пикселя (пикселей), передаваемых за единицу времени из устройства 100 съемки изображения в устройство 200 обработки изображения.
В обычной видеокамере, как показано на фиг.2А, модуль обработки в соответствии с блоком вывода данных всегда использует выходные выводы для, в сумме, десяти каналов, независимо от режима съемки изображения. Таким образом, в обычной видеокамере частота битов на канал изменяется в соответствии с режимом съемки изображения.
В то же время в видеокамере 1 в соответствии с вариантом воплощения, как показано на фиг.2В, системный контроллер 400 изменяет в соответствии с режимом съемки изображения количество каналов для выходных выводов, предназначенных для использования в блоке 120 выхода данных.
В этом варианте воплощения подробно описаны конфигурации устройства 100 съемки изображения и устройства 200 обработки изображения в то время, как была подробно описана обработка выбора количества каналов, предназначенных для использования для выходных выводов, описанных выше.
Прежде всего со ссылкой на фиг.3 будет описана конфигурация датчика 110 изображения КМОП.
Датчик 110 изображения КМОП включает в себя, как показано на фиг.3, множество единичных пикселей 21, которые расположены двумерно в m столбцах × n строк, и m линий (22-1, 22-2, …, 22-m) сигнала столбцов для передачи электрических сигналов, выводимых из отдельных единичных пикселей 21. Кроме того, датчик 110 изображения КМОП включает в себя n линий 23 (23-1, 23-2, …, 23-n) горизонтального выбора, соединенных с m единичными пикселями 21, расположенными в горизонтальном направлении, и схему 24 выбора горизонтального адреса для подачи сигналов выбора в n линий 23 горизонтального выбора 23.
Датчик 110 изображения КМОП включает в себя четыре усилителя 25 (25-1, 25-2, 25-3, 25-4) столбцов, m переключателей 26 (26-1, 26-2, …, 26-m) столбцов, соединенных с отдельными строками 22 сигнала столбца, схему 27 выбора вертикального адреса и четыре аналого/цифровых (A/D, А/Ц) преобразователя, соединенных с выходными выводами усилителей 25 отдельных столбцов.
m линий 22 сигналов столбцов, которые сгруппированы в наборы из нескольких линий (четырех линий), соответствующих усилителям 25 столбца, индивидуально соединены через соответствующие переключатели 26 выбора столбца с соответствующими усилителями 25 столбца. То есть в наборах из четырех линий первые линии 22 (22-1, 22-5, …, 25-(n-3)) сигнала столбца соединены с усилителем 25-1 столбца через соответствующие переключатели 26 выбора столбца. Вторые линии 22 (22-2, 22-6, …, 25-(n-2)) сигнала столбца соединены с усилителем 25-2 столбца через соответствующие переключатели 26 выбора столбца. Третьи линии 22 (22-3, 22-7, …, 25-(n-1)) сигнала столбца соединены с усилителем 25-3 столбца через соответствующие переключатели 26 выбора столбца. Четвертые линии 22 (22-4, 22-8, …, 25-n) сигнала столбца соединены с усилителем 25-4 столбца через соответствующие переключатели 26 выбора столбца.
Блок 27 выбора вертикального адреса генерирует сигналы выбора столбца для включения и выключения переключателя 26 выбора столбца. Схема 27 управления вертикальным адресом управляет, для каждого набора, состоящего из четырех линий 22 сигнала столбца, включением и выключением переключателей 26 выбора столбца. Когда переключатель 26 выбора столбца включают, электрические сигналы, выводимые из единичных пикселей 21, соединенных с линией 22 сигнала столбца, подают в соответствующий усилитель 25 столбца.
А/Ц преобразователи 28 преобразуют в цифровую форму электрические сигналы, усиленные с помощью усилителей 25 столбца, и выводят 10 битов данных пикселя на пиксель. Кроме того, выходной вывод каждого из А/Ц преобразователей 28 соединен с блоком 120 вывода данных через, в сумме, десять линий сигнала, соответствующих отдельным элементам битовых данных, составляющим данные пикселя. Например, в каждые моменты времени, когда импульсный сигнал, основанный на опорной тактовой частоте CLK0, поднимается и падает, выводят данные 1 бита.
Кроме того, что касается датчика 110 изображения КМОП, рабочая частота опорной тактовой частоты CLK0, подаваемой из системного контроллера 400, отличается в зависимости от режима съемки изображения, как описано выше. Таким образом, датчик 110 изображения КМОП выводит данные пикселя с высокой скоростью в случае, когда выбран режим съемки изображения с высокой скоростью передачи данных пикселей, и выводит данные пикселя с малой скоростью в случае, когда выбран режим съемки изображения в малой скоростью передачи данных пикселей.
Следует отметить, что, как показано на фиг.4, А/Ц преобразователи 29 могут быть установлены в отдельных линиях 22 сигнала столбцов таким образом, чтобы можно было использовать датчик 110 изображения КМОП, который непосредственно выводит преобразованные в цифровую форму данные пикселя по линиям 22 сигнала столбцов. В качестве альтернативы, датчик 110 изображения КМОП может выводить 1-битные данные в каждый момент времени, когда возникает импульсный сигнал, связанный с опорной тактовой частотой CLK0.
Как описано выше, датчик 110 изображения КМОП снимает изображение предмета и передает четыре элемента параллельных данных пикселя за единицу времени через, в сумме, сорок линий сигнала в блок 120 выхода данных.
Далее со ссылкой на фиг.5 будут описаны конфигурации блока 120 выхода данных и устройства 200 обработки изображения.
Блок 120 выхода данных выполняет описанную ниже обработку данных для четырех параллельных элементов данных пикселей, подаваемых из датчика 110 изображения КМОП через, в сумме, сорок линий сигнала, и передает данные снятого изображения в устройство 200 обработки изображения через, самое большее, десять каналов дифференциальной передачи, через выходные выводы. Поскольку элементы данных пикселя выводят через, самое большее, десять каналов дифференциальной передачи, как описано выше, в блоке 120 вывода данных количество выходных выводов для вывода данных наружу из твердотельного устройства 100 съемки уменьшается. В соответствии с этим количество линий сигнала, обеспечивающих возможность соединения между твердотельным устройством 100 съемки изображения и устройством 200 обработки изображения, уменьшается. По сравнению со случаем, когда общее количество - сорок линий сигнала непосредственно соединены между устройством 100 съемки изображения и устройством 200 обработки изображения, размер схемы, как и всего устройства, можно существенно уменьшить.
В частности, блок 120 вывода данных включает в себя схему 121 умножения частоты, предназначенную для генерирования высокой тактовой частоты CLK1 в результате выполнения умножения опорной тактовой частоты CLK0, модуль 122 обработки изменения компоновки, предназначенный для изменения компоновки четырех параллельных элементов данных пикселя, передаваемых из датчика 110 изображения КМОП, в последовательности битовых данных в параллельном формате, модуль 123 параллельно/последовательного преобразования, предназначенный для преобразования последовательности битовых данных, компоновка которых была изменена модулем 122 обработки изменения компоновки, в последовательный формат, передатчики 124 (124-1, 124-2, …, 124-10) данных для, в сумме, десяти каналов, предназначенные для передачи последовательности битовых данных в последовательном формате, преобразованных модулем 123 параллельно/последовательного преобразования, в устройство 200 обработки изображения, и передатчик 125 тактовой частоты, предназначенный для передачи высокой тактовой частоты CLK1, генерируемой схемой 121 умножения частоты 121, в устройство 200 обработки изображения.
Здесь каждый из передатчиков 124 (124-1, 124-2, …, 124-10) данных и передатчик 125 тактовой частоты представляют собой дифференциальные усилители и соединены с устройством 200 обработки изображения через каналы дифференциальной передачи, каждый из которых сформирован парой из двух линий сигнала.
В частности, передатчик 125 тактовой частоты передает высокую тактовую частоту CLK1, используя два импульсных сигнала, имеющих противоположные фазы. Каждый из передатчиков 124 данных также передает битовые данные, используя два импульсных сигнала, имеющих противоположные фазы.
Устройство 200 обработки изображения включает в себя приемники 201 (201-1, 201-2, …, 201-10) данных, составляющие, в сумме, десять каналов для приема последовательности импульсных данных в последовательном формате, передаваемых через каналы дифференциальной передачи, приемник 202 тактовой частоты, предназначенный для приема высокой тактовой частоты CLK1, передаваемой из передатчика 125 тактовой частоты блока 120 выхода данных, схему 203 деления частоты, предназначенную для генерирования тактовой частоты, которая синхронизирована с высокой тактовой частотой CLK1, принятой приемником 202 тактовой частоты, модуль 204 последовательного/параллельного преобразования, предназначенный для преобразования последовательности битовых данных в последовательном формате, принимаемых индивидуальными приемниками 201 данных, в последовательности битовых данных в параллельном формате, модуль 205 детектирования границ данных, предназначенный для детектирования границ элементов данных отдельных пикселей из последовательностей битовых данных в параллельном формате, модуль 206 обработки изменения компоновки, предназначенный для формирования данных пикселей из снятых данных изображения на основе границы, детектированной модулем 205 детектирования границы данных, и модуль 207 детектирования синхронного кода, предназначенный для детектирования синхронного кода, содержащегося в данных пикселей, сформированных модулем 206 обработки изменения компоновки.
Здесь приемники 201 данных и приемник 202 тактовой частоты представляют собой дифференциальные усилители. Приемники 201 данных и приемник 202 тактовой частоты принимают битовые данные, выраженные импульсными сигналами, переданными из передатчиков 124 данных и передатчика 125 тактовой частоты блока 120 выхода данных соответственно.
Кроме того, в случае когда данные снятого изображения передают из устройства 100 съемки изображения через каналы дифференциальной передачи в устройство 200 обработки изображения, влияние синфазных шумов менее вероятно будет ощущаться по сравнению со способом одиночной передачи. Таким образом, в способе дифференциальной передачи, даже если амплитуда сигнала будет уменьшена, данные можно надежно передавать по сравнению со способом одиночной передачи. Поэтому модуль 120 выхода данных может увеличить скорость передачи данных на величину, соответствующую уменьшению величины компонентов сигнала по сравнению со случаем, когда данные снятого изображения передают с помощью способа одиночной передачи. Поскольку увеличение скорости передачи данных может быть достигнуто, как описано выше, битовые данные можно передавать на основе высокой тактовой частоты CLK1, которую генерируют с помощью схемы 121 умножения частоты.
Здесь, как показано на фиг.6, высокую тактовую частоту CLK1 получают путем умножения интервала Т импульсов опорной тактовой частоты CLK0 на 1/4, и эта частота находится в синхронизации с опорной тактовой частотой CLK0. Высокую тактовую частоту CLK1 подают в каждый из модулей 123 параллельного/последовательного преобразования и в передатчик 125 тактовой частоты.
Кроме того, высокую тактовую частоту CLK1 передают из передатчика 125 тактовой частоты через канал дифференциальной передачи в приемник 202 тактовой частоты устройства 200 обработки изображения. Схема 203 деления частоты делит высокую тактовую частоту CLK1, принятую приемником 202 тактовой частоты, для генерирования высокой тактовой частоты CLK2 и низкой тактовой частоты CLK3, которые синхронны с высокой тактовой частотой CLK1 и опорной тактовой частотой CLK0 соответственно, и передает высокую тактовую частоту CLK2 и низкую тактовую частоту CLK3 в каждый модуль обработки. Здесь высокую тактовую частоту CLK2 получают в результате умножения интервала импульсов низкой тактовой частоты CLK3 на 1/4. Как описано выше, в устройстве 200 обработки изображения синхронизация устройства 100 съемки изображения может быть обеспечена на основе высокой тактовой частоты CLK2 и низкой тактовой частоты CLK3.
Кроме того, в ответ на инструкцию управления, переданную из системного контроллера 400, блок 120 выхода данных выбирает количество каналов, предназначенных для использования для выходных выводов, то есть передатчиков 124 данных, в которые подают электроэнергию для обеспечения их работы в соответствии с режимом съемки изображения. Аналогично устройство 200 обработки изображения также выбирает приемники 201 данных, в которые подают электроэнергию для обеспечения их работы в соответствии с режимом съемки изображения. Как описано выше, работа блока 120 выхода данных и устройства 200 обработки изображения изменяется в соответствии с режимом съемки изображения.
Далее будет описана конкретная работа каждого модуля обработки блока 120 выхода данных и устройства 200 обработки изображения. Ниже из всего четырех типов режимов съемки изображения, показанных на фиг.2А и 2В в качестве конкретных примеров, используют три типа режимов съемки изображения, режим (432 [мегапикселей/с]) записи неподвижного изображения, режим (108 [мегапикселей/с]) записи движущегося изображения ВЧ и режим (27 [мегапикселей/с]) мониторинга. В начале, при установке режима съемки в режим (432 [мегапикселей/с]) записи неподвижного изображения, будет подробно описана работа каждого модуля обработки устройства 120 выхода данных и устройства 200 обработки изображения.
Модуль 122 обработки изменения компоновки перегруппирует четыре элемента параллельных данных пикселей, передаваемых из датчика 110 изображения КМОП в десять параллельных последовательностей битовых данных.
Например, как показано на фиг.7, в случае когда четыре элемента параллельных данных пикселя определены как первый элемент (Dl [1], D1 [2], …, D1 [10]) данных пикселя, второй элемент (D2 [1], D2 [2], …, D2 [10]) данных пикселя, третий элемент (D3 [1], D3 [2], …, D3 [10]) данных пикселя и четвертый элемент (D4 [1], D4 [2], …, D4 [10]) данных пикселя, модуль 122 обработки изменения компоновки перегруппирует четыре элемента параллельных данных пикселя в первую последовательность (Dl [1], D2 [1], D3 [1], D4 [1]) битовых данных, вторую последовательность (D1 [2], D2 [2], D3 [2], D4 [2]) битовых данных, … и десятую последовательность (D1 [10], D2 [10], D3 [10], D4 [10]) битовых данных. Здесь модуль 122 обработки изменения компоновки выполняет обработку перегруппировки четырех элементов параллельных данных пикселя в десять последовательностей параллельных битовых данных в каждый момент синхронизации, когда импульсный сигнал на основе опорной тактовой частоты CLK0 поднимается и падает. Кроме того, последовательности битовых данных подают из модуля 122 обработки изменения компоновки в модуль 123 параллельно/последовательного преобразования.
Модуль 123 параллельно/последовательного преобразования назначает отдельные последовательности битовых данных передатчикам 124 данных, соответствующих отдельным каналам, как показано на фиг.8А и 8В. Затем передатчики 124 данных каждого канала выводят данные на основе от бита к биту в каждый момент синхронизации, когда импульсный сигнал на основе высокой тактовой частоты CLK1 поднимается и падает. Например, первую последовательность битовых данных выводят из передатчика 124-1 в порядке D1 [1], D2 [1], D3 [1] и D4 [1] в отдельные моменты времени, когда импульсный сигнал на основе высокой тактовой частоты CLK1 поднимается и падает. То есть, что касается всех передатчиков 124 данных для десяти каналов, данные пикселя для одного пикселя выводят в каждый момент времени синхронизации, когда импульсный сигнал на основе высокой тактовой частоты CLK1 поднимается и падает.
Элементы битовых данных, выводимые из каждого из передатчиков 124 данных, передают через дифференциальный канал передачи в соответствующий приемник 201 данных устройства 200 обработки изображения. Модуль 204 последовательного/параллельного преобразования детектирует элементы битовых данных из импульсного сигнала, передаваемого в каждый из приемников 201 данных в соответствии с каждым из моментов времени синхронизации, когда импульсный сигнал на основе высокой тактовой частоты CLK2 поднимается и падает. Кроме того, модуль 204 последовательного/параллельного преобразования передает множество элементов битовых данных, считываемых из каждого из приемников 201 данных, как последовательность битовых данных в модуль 205 детектирования границ данных, в каждый момент времени, когда импульсный сигнал на основе низкой тактовой частоты CLK3 поднимается и падает. Здесь, поскольку низкоскоростная тактовая частота CLK3 соответствует четырем периодам высокой тактовой частоты CLK2, модуль 204 последовательного/параллельного преобразования передает в модуль 205 детектирования границы данных, в сумме, десять последовательностей битовых данных, в которых каждая последовательность состоит из четырех битов.
Модуль 205 детектирования границ данных детектирует младший значимый бит и старший значимый бит каждого элемента данных пикселя из последовательностей битовых данных, переданных из модуля 204 последовательного/параллельного преобразования, в каждый момент времени, когда импульсный сигнал на основе низкой тактовой частоты CLK3 поднимается и падает, и передает последовательности битовых данных, включающих в себя результаты детектирования, добавленные к ним, в модуль 206 обработки изменения компоновки.
Модуль 206 обработки изменения компоновки генерирует расширенные данные пикселя длиной 14 битов на каждый пиксель из последовательностей битовых данных, передаваемых из модуля детектирования границ данных 205, в каждый момент времени, когда импульсный сигнал на основе низкой тактовой частоты CLK3 поднимается и падает, и передает эти данные пикселя в модуль 207 детектирования синхронного кода.
Модуль 207 детектирования синхронного кода детектирует синхронный код из каждого элемента данных пикселя, передаваемых из модуля 206 изменения компоновки, в каждый момент времени, когда импульсный сигнал на основе низкой тактовой частоты CLK3 поднимается и падает. В результате такой обработки синхронизации может быть обеспечена синхронизация между множеством элементов данных пикселей, составляющих экран.
Затем в устройстве 200 обработки изображения снятые данные изображения, в которых может быть обеспечена синхронизация между элементами данных пикселя на экран, сохраняют как отдельные экраны в запоминающем устройстве.
Как описано выше, в случае когда съемку изображения осуществляют в режиме съемки неподвижного изображения в видеокамере 1 в соответствии с данным вариантом воплощения, электроэнергию подают в десять каналов дифференциальной передачи таким образом, что обеспечивается работа десяти каналов дифференциальной передачи, и данные снятого изображения передают из твердотельного устройства 100 съемки изображения в устройство 200 обработки изображения со скоростью данных 432 [Мбит в секунду] на канал аналогично обычной видеокамере.
Далее со ссылкой на фиг.8А и 8В будет описана обработка для передачи данных снятого изображения в случае, когда режим съемки изображения установлен как режим записи движущегося изображения ВЧ. Следует отметить, что описание блока 120 выхода данных и устройства 200 обработки изображения, относящихся к обработке, аналогичной выполняемой в режиме съемки неподвижного изображения, не будет приведено.
В случае когда режим съемки изображения установлен как режим съемки движущегося изображения ВЧ, модуль 122 обработки изменения компоновки блока 120 выхода данных выполняет перегруппировку четырех элементов параллельных данных пикселей, подаваемых из датчика 110 изображения КМОП в пять параллельных последовательностей битовых данных, каждая из которых имеет восемь битов.
В частности, что касается пяти параллельных последовательностей битовых данных, элементы данных пикселя перегруппируют в первую последовательность (Dl [1], D1 [2], D2 [1], D2 [2], D3 [1], D3 [2], D4 [1], D4 [2]) битовых данных, вторую последовательность (D1 [3], D1 [4], D2 [3], D2 [4], D3 [3], D3 [4], D4 [3], D4 [4]) битовых данных, … и пятую последовательность (D1 [9], D1 [10], D2 [9], D2 [10], D3 [9], D3 [10], D4 [9], D4 [10]) битовых данных, как показано на фиг.8А. Затем пять параллельных последовательностей битовых данных передают через пять каналов дифференциальной передачи в устройство 200 обработки изображения.
Как описано выше, в случае когда съемку изображения выполняют в режиме записи движущегося изображения ВЧ, как показано на фиг.2А и 2В, электроэнергию подают в пять каналов дифференциальной передачи и данные снятого изображения передают из твердотельного устройства 100 съемки изображения в устройство 200 обработки изображения со скоростью передачи данных 216 [Мбит в секунду] на канал.
В то же время в обычной видеокамере, как показано на фиг.8В, работают все десять каналов дифференциальной передачи, и данные снятого изображения передают из твердотельного устройства 100 съемки изображения в устройство 200 обработки изображения со скоростью передачи данных 108 [Мбит в секунду] на канал.
Таким образом, в блоке 120 выхода данных и в устройстве 200 обработки изображения в соответствии с данным вариантом воплощения, по сравнению с обычной видеокамерой, показанной на фиг.9В, данные снятого изображения передают с удвоенной скоростью передачи битов на канал.
Далее со ссылкой на фиг.9А и 9В будет описана обработка передачи данных снятого изображения в случае, когда режим съемки изображения установлен в режим мониторинга.
В видеокамере 1 в соответствии с данным вариантом воплощения, как показано на фиг.9А, четыре элемента параллельных данных пикселей, передаваемых из датчика 110 изображения КМОП, перегруппируют в одну последовательность битовых данных с помощью модуля 122 обработки изменения компоновки и эту одну последовательность битовых данных передают через один канал дифференциальной передачи в устройство 200 обработки изображения. То есть в случае, когда режим съемки изображения установлен в режим мониторинга, электроэнергию подают только в один канал дифференциальной передачи.
Как описано выше, в случае когда съемку изображения осуществляют в режиме мониторинга, как показано на фиг.2А и 2В, работает один канал дифференциальной передачи, и данные снятого изображения передают из твердотельного устройства 100 съемки изображения в устройство 200 обработки изображения со скоростью передачи данных 270 [Мбит в секунду] на канал.
В то же время в обычной видеокамере, как описано выше, данные снятого изображения передают, используя все десять каналов дифференциальной передачи. В частности, в обычной видеокамере, как показано на фиг.9В, по сравнению со случаем, когда видеокамера работает в других режимах съемки изображения, скорость передачи битов на канал мала.
В частности, поскольку системы дифференциальной передачи, в которых входные/выходные выводы используются как дифференциальные усилители, выполняют передачу с постоянным током, происходит только незначительное изменение потребления электроэнергии в системе дифференциальной передачи в соответствии с частотой передачи. Однако потребление электроэнергии в системе дифференциальной передачи увеличивается пропорционально количеству используемых каналов дифференциальной передачи.
Здесь в режиме записи неподвижного изображения, как в обычной видеокамере, так и в видеокамере 1 в соответствии данным вариантом воплощения, используют десять каналов дифференциальной передачи. Таким образом, электроэнергия, потребляемая видеокамерой 1, в соответствии с данным вариантом воплощения во время дифференциальной передачи данных снятого изображения эквивалентна энергии, потребляемой в обычном способе передачи. То есть в случае, когда скорость передачи пикселей данных снятого изображения велика, существуют ограничения в скорости передачи на канал, и обработку передачи выполняют аналогично, используя все каналы дифференциальной передачи. Таким образом, по сравнению с обычной видеокамерой, существует только незначительная разница в количестве электроэнергии, потребляемой в системах дифференциальной передачи.
В то же время в режиме записи движущегося изображения ВЧ в обычной видеокамере используют десять каналов дифференциальной передачи, в то время как в видеокамере 1 в соответствии с данным вариантом воплощения используют пять каналов дифференциальной передачи. Таким образом, видеокамера 1 в соответствии с данным вариантом воплощения позволяет уменьшить потребление электроэнергии системами дифференциальной передачи практически на половину по сравнению с обычной видеокамерой.
Аналогично, в режиме мониторинга видеокамера 1 в соответствии с данным вариантом воплощения может уменьшить потребление электроэнергии системами дифференциальной передачи приблизительно в десять раз по сравнению с обычной видеокамерой.
Как описано выше, видеокамера 1 в соответствии с данным вариантом воплощения включает системы дифференциальной передачи для отдельных каналов таким образом, что данные передают с более высокой скоростью передачи, независимо из режима съемки изображения, и, таким образом, передают данные снятого изображения. Кроме того, видеокамера 1 в соответствии с данным вариантом воплощения передает данные снятого изображения, используя каналы дифференциальной передачи, количество которых пропорционально частоте передачи пикселей. Таким образом, видеокамера 1 может уменьшить количество включенных каналов дифференциальной передачи и обеспечить уменьшение потребления электроэнергии в случае, когда данные снятого изображения передают с малой скоростью передачи пикселей.
Как описано выше, поскольку видеокамера 1 передает данные снятого изображения через каналы дифференциальной передачи, видеокамера 1 может уменьшить ненужное излучение, возникающее во время передачи данных. Кроме того, поскольку в видеокамере 1 включают минимальное необходимое количество дифференциальных усилителей в соответствии с качеством изображения данных изображения, данные снятого изображения могут быть переданы с уменьшенным потреблением электроэнергии, независимо от качества изображения данных снятого изображения, предназначенных для передачи.
Следует отметить, что настоящее изобретение не ограничивается только описанным выше вариантом воплощения. Очевидно, что различные изменения могут быть выполнены без выхода за пределы сущности настоящего изобретения. В частности, хотя системы дифференциальной передачи для передачи данных пикселей из устройства 100 съемки изображения в устройство 200 обработки изображения выполнены в описанном выше варианте воплощения как десять каналов дифференциальной передачи, количество каналов не ограничивается этим. Кроме того, хотя высокую тактовую частоту CLK1 и CLK2 в данном варианте воплощения получают путем умножения рабочей частоты опорной тактовой частоты на четыре, высокая тактовая частота CLK1 и CLK2 не ограничивается этим.

Изобретение относится к устройствам захвата и обработки изображения. Техническим результатом является увеличение скорости считывания элементов данных пикселей из отдельных модулей пикселей датчика изображения КМОП и вывода считанных сигналов изображения с высокой скоростью наружу через малое количество выходных выводов. Результат достигается тем, что устройство для передачи данных изображения из устройства съемки изображения в устройство обработки изображения с уменьшенным потреблением электроэнергии включает в себя датчик изображения КМОП, который считывает данные снятого изображения на основе опорной тактовой частоты CLK0, схему (121) умножения частоты, которая генерирует высокую тактовую частоту CLK1, схему (122) изменения компоновки, которая выполняет перегруппировку данных снятого изображения в последовательности битовых данных, схему (120) вывода данных, которая обеспечивает последовательную передачу каждым из передатчиков (124) данных соответствующей последовательности битовых данных наружу на основе высокой тактовой частоты CLK1, и системный контроллер (400), который управляет передатчиками (124) данных, количество которых пропорционально скорости передачи. 3 н. и 2 з.п. ф-лы, 11 ил.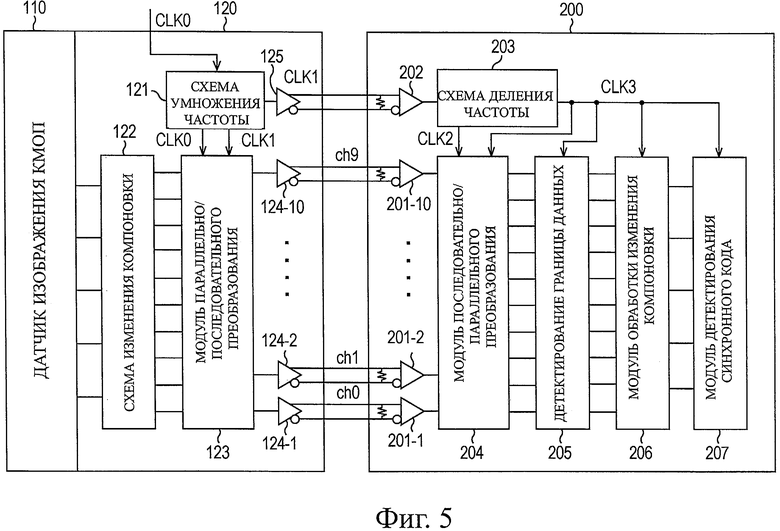
1. Твердотельное устройство съемки изображения, отличающееся тем, что содержит: твердотельный элемент съемки изображения, который считывает на основе первой
тактовой частоты элементы данных снятого изображения из единичных пикселей, которые расположены двумерно;
второй модуль генерирования тактовой частоты, который генерирует вторую тактовую частоту, имеющую более высокую рабочую частоту, чем первая тактовая частота;
модуль обработки компоновки, который преобразует компоновку снятых элементов данных изображения, считываемых из твердотельного элемента съемки изображения, в последовательности битовых данных;
модуль передачи данных, который включает в себя множество дифференциальных усилителей для передачи последовательности битовых данных, компоновка которых была изменена модулем обработки компоновки, через множество каналов дифференциальной передачи наружу, причем дифференциальные усилители передают последовательности битовых данных наружу на основе второй тактовой частоты; и
модуль управления, который управляет дифференциальными усилителями, количество которых пропорционально скорости передачи, с которой элементы данных снятого изображения передают наружу.
2. Твердотельное устройство съемки изображения по п.1, отличающееся тем, что второй модуль генерирования второй тактовой частоты генерирует вторую тактовую частоту, которую получают путем умножения рабочей частоты первой тактовой частоты.
3. Твердотельное устройство съемки изображения по п.1, отличающееся тем, что твердотельный элемент съемки изображения считывает элементы данных пикселей во множестве столбцов за единицу времени на основе первой тактовой частоты, и модуль обработки компоновки преобразует компоновку элементов данных пикселей во множестве столбцов в последовательностях битовых данных.
4. Способ передачи данных, предназначенный для вывода через множество каналов дифференциальной передачи наружу элементов данных снятого изображения, считанных из твердотельного элемента съемки изображения, в котором единичные пиксели скомпонованы двумерно, при этом способ передачи данных отличается тем, что он содержит этапы, на которых:
изменяют компоновку элементов данных снятого изображения, считанных из твердотельного элемента съемки изображения, в заданное количество последовательностей битовых данных;
генерируют вторую тактовую частоту, имеющую более высокую рабочую частоту, чем первая тактовая частота;
управляют дифференциальными усилителями, количество которых пропорционально скорости передачи, с которой элементы данных снятого изображения передают наружу; и
передают для отдельных управляемых дифференциальных усилителей каждую из последовательностей битовых данных с измененной компоновкой наружу на основе второй тактовой частоты.
5. Устройство съемки изображения, содержащее блок обработки снятого изображения, который считывает на основе первой тактовой частоты элементы данных снятого изображения из твердотельного элемента съемки изображения, в котором единичные пиксели скомпонованы двумерно, и блок обработки изображения, который выполняет заданную обработку для элементов данных снятого изображения, считываемых из блока обработки съемки изображения, при этом устройство съемки изображения отличается тем, что:
блок обработки снятого изображения включает в себя
второй модуль генерирования тактовой частоты, который генерирует вторую тактовую частоту, имеющую большую рабочую частоту, чем первая тактовая частота,
модуль обработки компоновки, который изменяет компоновку элементов данных снятого изображения, считываемых из твердотельного элемента съемки изображения в заданное количество последовательных битовых данных,
модуль передачи данных, который включает в себя множество дифференциальных усилителей для передачи последовательностей битовых данных, компоновка которых была изменена модулем обработки компоновки, через множество каналов дифференциальной передачи наружу, причем дифференциальные усилители передают последовательности битовых данных наружу на основе второй тактовой частоты, и
модуль управления, который управляет дифференциальными усилителями, количество которых пропорционально скорости передачи, с которой элементы данных снятого изображения передают в блок обработки изображения.
| JP 2005086224 А, 31.03.2005 | |||
| СПОСОБ ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКИ ИЗОБРАЖЕНИЙ НА ОСНОВЕ МАТРИЦ ФОТОЧУВСТВИТЕЛЬНЫХ ПРИБОРОВ С ЗАРЯДОВОЙ СВЯЗЬЮ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2216117C2 |
| JP 2005244709 A, 08.09.2005 | |||
| JP 9322077 A, 12.12.1997 | |||
| ТЕЛЕВИЗИОННАЯ КАМЕРА НА ПРИБОРАХ С ЗАРЯДОВОЙ СВЯЗЬЮ | 1993 |
|
RU2083056C1 |

