Изобретение может быть использовано для определения фокусных расстояний оптических систем оптических или оптико-электронных приборов (ОиОЭП) при разработке и исследовании оптических систем и систем технического зрения.
Известен способ измерения фокусного расстояния [1], заключающийся в следующем. Матричный приемник изображения ОиОЭП располагают на расстоянии, совпадающем с фокусным расстоянием f' оптической системы ОиОЭП, фокусируют оптическую систему ОиОЭП на бесконечность, размещают тестовый точечный объект на оптической оси и последовательно смещают тестовый точечный объект вдоль оптической оси на известные расстояния l1, l2 и l3 от первоначального. Для каждого положения точечного объекта измеряют радиус круга на изображении, после чего, представляя оптическую систему в виде эквивалентной линзы и используя законы геометрической оптики в части взаимосвязи между фокусным расстоянием f', расстоянием а от линзы до предмета и расстоянием а' от линзы до изображения предмета, составляют систему уравнений. В результате решения системы определяют фокусное расстояние по формуле:
где  ,
,  ,
,  ;
;
σ1 - радиус круга на изображении в пикселях в исходном состоянии;
σ2, σ3, σ4 - радиусы круга на изображениях в пикселях после перемещения точечного объекта вдоль главной оптической оси на расстояния l1, l2 и l3 соответственно.
Недостатками данного способа являются необходимость точного определения расстояний нескольких механических перемещений точечного объекта и соблюдение требования перемещения его строго вдоль главной оптической оси оптической системы, что существенно снижает точность и затрудняет измерения.
Задачей, на решение которой направлено данное изобретение, является уменьшение влияния механических перемещений тестового объекта измерения на точность определения фокусных расстояний оптических систем ОиОЭП.
Технический результат - повышение достоверности и точности определения фокусных расстояний оптических систем ОиОЭП.
Указанный технический результат достигается тем, что, как и в известном способе определения фокусного расстояния оптической системы, посредством ОиОЭП получают несколько изображений тестового объекта, расположенного на оптической оси на измеряемом расстоянии.
В предлагаемом способе для определения фокусных расстояний оптических систем две ОиОЭП, имеющие идентичные приемники изображения, располагают рядом таким образом, чтобы передние главные плоскости обеих оптических систем были совмещены, получают с их помощью два изображения тестового объекта и на каждом полученном изображении определяют размеры изображений тестового объекта. Затем смещают на некоторое измеряемое расстояние вдоль оптических осей этот же тестовый объект или выбирают другой тестовый объект, отличающийся от первого расстоянием до него, вновь получают два изображения тестового объекта и на каждом полученном изображении определяют размеры изображений тестового объекта, после чего рассчитывают фокусные расстояния оптических систем.
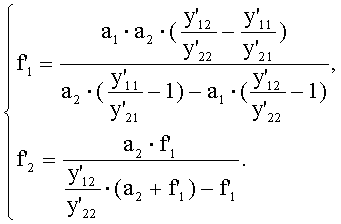
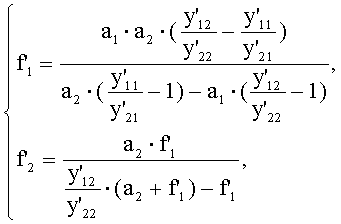
В отличие от известного, в предлагаемом способе получают две пары изображений тестовых объектов посредством двух ОиОЭП с идентичными приемниками изображений, имеющих оптические системы с неизвестными фокусными расстояниями f1' и f2', располагаемыми таким образом, чтобы их передние главные плоскости были совмещены, и определяют фокусные расстояния по формулам:
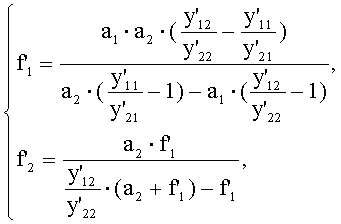
где y'11 и y'21 - размеры изображений тестового объекта, расположенного на расстоянии а1 от совмещенных передних главных плоскостей обеих в плоскостях оптических систем с фокусными расстояниями f'1 и f'2,
y'12 и y'22 - размеры изображений тестового объекта, расположенного на расстоянии а2 от совмещенных передних главных плоскостей обеих оптических систем, в плоскостях изображения оптических систем с фокусными расстояниями f'1 и f'2.
Общим признаком прототипа и заявляемого способа является получение нескольких изображений тестового объекта с помощью ОиОЭП.
Сравнение заявляемого способа с прототипом позволило установить соответствие их условию "новизна". При сравнении заявляемого способа с другими известными техническими решениями не выявлены сходные признаки, что позволяет сделать вывод о соответствии условию "изобретательский уровень".
Способ поясняется чертежом.
Размер объекта у и расстояние а от объекта до совмещенных передних главных плоскостей Н оптических систем с фокусными расстояниями f'1 и f2' являются величинами постоянными, а изображения объекта y1' и y2', получаемые посредством данных оптических систем, отличаются друг от друга масштабом. Как известно из геометрической оптики [2], взаимосвязь между фокусным расстоянием f', расстоянием а до предмета, размерами предмета y и его изображения y' можно выразить формулой:
Используя это выражение для двух оптических систем, можно записать следующее отношение
где f'1 и f'2 - фокусные расстояния первой и второй оптических систем,
y'1 и y'2 - размеры изображений тестового объекта у на изображениях, формируемых первой и второй оптическими системами.
В случае получения изображений с помощью двух ОиОЭП, имеющих оптические системы с фокусными расстояниями f'1 и f'2, имеем следующую систему уравнений:
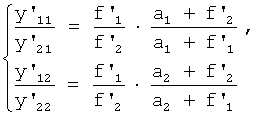
где y'11 и y'21 - размеры изображений тестового объекта, расположенного на расстоянии а1 от совмещенных передних главных плоскостей обеих оптических систем, в плоскостях изображения оптических систем с фокусными расстояниями f'1 и f'2;
y'12 и y'22 - размеры изображений тестового объекта, расположенного на расстоянии а2 от совмещенных передних главных плоскостей обеих оптических систем, в плоскостях изображения оптических систем с фокусными расстояниями f'1 и f'2. Решив данную систему уравнений относительно f'1 и f'2, получаем следующие зависимости для определения фокусных расстояний оптических систем:
Таким образом, предлагаемый способ позволяет определить фокусные расстояния двух оптических систем f'1 и f'2 посредством определения отношений размеров изображений  и
и  тестовых объектов, расположенных на известных расстояниях а1 и а2 до них.
тестовых объектов, расположенных на известных расстояниях а1 и а2 до них.
Использованные источники
1. Патент РФ №2315965, МПК G01М 11/02 на изобретение "Способ измерения параметров оптических систем".
2. Прикладная оптика. Под ред. Заказнова Н.П. - М.: Машиностроение, 1988. - 312 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОКУСНОГО РАССТОЯНИЯ ОПТИЧЕСКОЙ СИСТЕМЫ | 2009 |
|
RU2408862C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ОПТИЧЕСКИХ СИСТЕМ | 2005 |
|
RU2315965C2 |
| Способ определения параметров когерентного излучения | 1984 |
|
SU1220436A1 |
| МОНОСТАТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ НИЖНЕЙ ГРАНИЦЫ ОБЛАЧНОСТИ | 2008 |
|
RU2377612C1 |
| УСТРОЙСТВО КОРРЕКЦИИ СФЕРИЧЕСКОЙ АБЕРРАЦИИ | 2005 |
|
RU2295713C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АМПЛИТУДНО-ФАЗОВОЙ СТРУКТУРЫ СВЕРХКОРОТКИХ СВЕТОВЫХ ИМПУЛЬСОВ С ПОМОЩЬЮ СПЕКТРАЛЬНОГО ПРИБОРА | 2007 |
|
RU2345335C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СВЕТОРАССЕЯНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2329475C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНОЙ СТРУКТУРЫ ДРЕВОСТОЯ | 2013 |
|
RU2536183C2 |
| Система для измерения солнечных спектров атмосферы | 2022 |
|
RU2789993C1 |
| Способ формирования трубчатого канального волновода и установка для его осуществления | 2019 |
|
RU2711001C1 |
Изобретение может быть использовано при разработке и исследовании оптических систем и систем технического зрения. В способе две ОиОЭП с идентичными приемниками изображений располагают таким образом, чтобы передние главные плоскости их оптических систем были совмещены. Получают два изображения тестового объекта, располагаемого на расстоянии, измеряемом от совмещенных передних главных плоскостей. Смещают вдоль оптических осей оптических систем этот же тестовый объект или выбирают другой, отличающийся от первого расстоянием до него. Вновь получают два изображения тестового объекта. По полученным парам изображений тестовых объектов определяют размеры изображений тестовых объектов, после чего рассчитывают фокусные расстояния оптических систем по формулам, приведенным в формуле изобретения. Технический результат - повышение достоверности и точности определения фокусных расстояний оптических систем ОиОЭП. 1 з.п. ф-лы, 1 ил.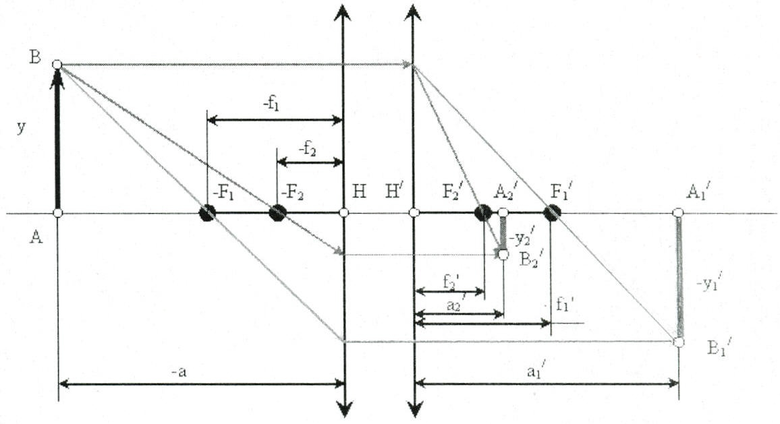
1. Способ определения фокусных расстояний двух оптических систем, по которому посредством первого оптического или оптико-электронного прибора (ОиОЭП), имеющего оптическую систему с неизвестным фокусным расстоянием, измеряют изображение тестового объекта, расположенного на оптической оси на измеряемом расстоянии, смещают тестовый объект вдоль оптической оси на некоторое измеряемое расстояние и вновь измеряют изображение тестового объекта, отличающийся тем, что рядом с имеющимся ОиОЭП располагают второй ОиОЭП с идентичным приемником изображения и оптической системой с неизвестным фокусным расстоянием таким образом, чтобы передние главные плоскости обеих оптических систем были совмещены, получают с его помощью второе изображение того же тестового объекта, причем расстояние, на котором расположен тестовый объект, измеряют от совмещенных передних главных плоскостей, и на каждом полученном изображении определяют размеры изображений тестового объекта, после чего смещают на некоторое измеряемое расстояние вдоль оптических осей ОиОЭП этот же тестовый объект или выбирают другой, отличающийся от первого расстоянием до него, вновь получают два изображения тестового объекта и на каждом полученном изображении определяют размеры изображений тестового объекта, после чего рассчитывают фокусные расстояния оптических систем по формулам:
где y'11 и y'21 - размеры изображений тестового объекта, расположенного на расстоянии a1 от совмещенных передних главных плоскостей обеих оптических систем, в плоскостях изображения оптических систем с фокусными расстояниями f'1 и f'2;
y'12 и y'22 - размеры изображений тестового объекта, расположенного на расстоянии а2 от совмещенных передних главных плоскостей обеих оптических систем, в плоскостях изображения оптических систем с фокусными расстояниями f'1 и f'2.
2. Способ определения фокусных расстояний двух оптических систем по п.1, отличающийся тем, что для получения второй пары изображений выбирают другой тестовый объект, отличающийся от первого расстоянием до него, а также размерами.
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ОПТИЧЕСКИХ СИСТЕМ | 2005 |
|
RU2315965C2 |
| JP 3296640 А, 27.12.1991 | |||
| Устройство для спуска длинномерных грузов | 1983 |
|
SU1138521A1 |
| US 4483604 А, 20.11.1984. | |||

