Изобретение относится к метеорологии, к способам для определения физических параметров атмосферы, и позволяет получать информацию о высоте нижней границы облачности (НГО) путем измерения расстояния до выбранного в качестве объекта измерения фрагмента облачности.
Известен способ измерения высоты НГО посредством измерителя [1], заключающийся в наблюдении пятна света, образованного на основании облака направленным вертикально вверх лучом прожектора, причем прожектор и фотоприемник разнесены на известное расстояние, а их оптические оси расположены в одной вертикальной плоскости. Недостатками этого способа являются малый ресурс работы источника световых импульсов измерителя, невысокая точность получаемых данных и невозможность проведения измерений в условиях солнечной засветки и несплошной облачности.
Известны также светолокационные способы измерения высоты нижней границы облачности, по которым в измерителях в качестве источника световых импульсов используются твердотельные лазеры [2, 3].
Недостатками этого способа являются ограниченный ресурс работы твердотельного лазера, высокая стоимость изготовления и эксплуатации измерителя.
Кроме этого, недостатками способов по [1, 2, 3] являются большие габариты, значительная потребляемая мощность измерителей и наличие активного излучателя.
Наиболее близким к предлагаемому техническому решению является принятый за прототип способ определения расстояния при помощи оптического прибора (ОП) [4]. Способ заключается в определении размера изображения объекта измерения в плоскости изображения ОП до и после перемещения ОП по направлению к объекту измерения (или от него) вдоль линии визирования ОП на фиксированное расстояние, после чего по формуле определяют расстояние до объекта измерения по формуле
где s - расстояние, на которое был перемещен ОП;
 - размер изображения объекта измерения в плоскости изображения ОП до перемещения;
- размер изображения объекта измерения в плоскости изображения ОП до перемещения;
 - размер изображения объекта измерения в плоскости изображения ОП после перемещения.
- размер изображения объекта измерения в плоскости изображения ОП после перемещения.
Признаки прототипа, которые совпадают с признаками заявляемого технического решения следующие: выбирают в качестве объекта измерения фрагмент нижней границы облачности, получают два разномасштабных изображения выбранного объекта, определяют размеры изображения объекта измерения в плоскости изображения оптического прибора, после чего рассчитывают высоту НГО.
Недостатками данного способа являются необходимость определения расстояния механического перемещения ОП и соблюдение требования перемещения ОП строго вдоль его линии визирования, что существенно снижает точность и затрудняет измерения.
Задачей, на решение которой направлено данное изобретение, является исключение влияния механического перемещения ОП на точность определения расстояния до объекта измерения.
Технический результат - повышение достоверности и точности определения расстояния до выбранного в качестве объекта измерения фрагмента нижней облачности, имеющего заранее неизвестные линейные размеры.
Указанный технический результат достигается тем, что для определения высоты нижней границы облачности выбирают в качестве объекта измерения фрагмент нижней границы облачности, получают два разномасштабных изображения выбранного объекта, определяют размеры изображения объекта измерения в плоскости изображения оптического прибора, после чего рассчитывают высоту НГО.
В отличие от известного, в предлагаемом способе разномасштабных изображения получают одновременно посредством двух идентичных оптико-электронных приборов (ОЭП), которые расположены так, чтобы их вертикальные линии визирования совпадали, а передние главные плоскости оптических систем были совмещены, причем оптические системы оптико-электронных приборов имеют отличные друг от друга фокусные расстояния  и
и  , высоту определяют по формуле:
, высоту определяют по формуле:
где - размер изображения объекта измерения в плоскости изображения первого ОЭП,
- размер изображения объекта измерения в плоскости изображения второго ОЭП,
 - фокусное расстояние ОС первого ОЭП,
- фокусное расстояние ОС первого ОЭП,
 - фокусное расстояние ОС второго ОЭП.
- фокусное расстояние ОС второго ОЭП.
Общими признаками прототипа и заявляемого способа является получение двух разномасштабных изображений объекта с неизвестными заранее линейными размерами.
Сравнение заявляемого способа с прототипом позволило установить соответствие их условию "новизна". При сравнении заявляемого способа с другими известными техническими решениями не выявлены сходные признаки, что позволяет сделать вывод о соответствии условию "изобретательский уровень".
Способ поясняется чертежом.
Размер объекта y и расстояние a от объекта до совмещенных передних главных плоскостей Н оптических систем с фокусными расстояниями и являются величинами постоянными, а изображения объекта и , получаемые посредством данных оптических систем, будут отличаться друг от друга масштабом, причем чем дальше будет находиться объект у (т.е. чем больше значение а), тем меньше будет отличие в масштабе изображений объекта и .
Пример. Два идентичных ОЭП располагают таким образом, чтобы вертикальные линии визирования оптических систем, имеющих отличные друг от друга фокусные расстояния и , совпадали, а передние главные плоскости оптических систем были совмещены. Затем получают два разномасштабных изображения выбранного в качестве объекта измерения фрагмента нижней облачности.
Согласно [5] имеем (чертеж):

где β1 - линейное увеличение ОС первого ОЭП,
β2 - линейное увеличение ОС второго ОЭП,
y - линейный размер объекта измерения.
Кроме того, согласно [5] имеем следующие соотношения:

и

где а - расстояние от передних главных плоскостей оптических систем первого и второго ОЭП до выбранного фрагмента нижней облачности.
Учитывая (2) и (3), выражение (1) можно переписать в виде

откуда получаем, что расстояние от совмещенных передних главных плоскостей ОС оптико-электронных приборов до выбранною фрагмента нижней облачности можно определить по следующей формуле:
Таким образом, предлагаемый способ позволяет получать информацию о высоте НГО как о расстоянии до фрагмента нижней границы облачности, выбранного в качестве объекта измерения. Преимущество изобретения состоит в том, что точность измерения повышается за счет отсутствия в процессе измерения механических перемещений оптико-электронных приборов, в качестве которых можно использовать телевизионные камеры на матричных ПЗС приемниках, причем точность измерения будет тем больше, чем больше размерность используемых в телевизионных камерах матриц.
Источники информации
1. Авторское свидетельство СССР №598390, МПК G01C 3/06, G01S 9/62, на изобретение "Измеритель высоты нижней границы облаков".
2. Патент РФ №2136016, МПК G01S 17/95, G01W 1/00, на изобретение "Светолокационный измеритель высоты нижней границы облаков".
3. Рекламный каталог фирмы Vaisala, Финляндия, Ceilometr CL31.
4. Патент РФ №2095756, МПК G01C 3/32, на изобретение "Способ определения расстояния до объекта при помощи оптического прибора".
5. Прикладная оптика. Под ред. Заказнова Н.П. - М.: Машиностроение, 1988. - 312 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ОБЛАЧНОСТИ | 2014 |
|
RU2583877C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ОБЛАЧНОСТИ (ВАРИАНТЫ) | 2014 |
|
RU2583954C2 |
| Моноскопический способ определения высоты нижней границы облачности | 2021 |
|
RU2779612C1 |
| Способ обнаружения оптических и оптико-электронных приборов | 2020 |
|
RU2742139C1 |
| ЛАБОРАТОРНАЯ УСТАНОВКА ДЛЯ ТЕМПЕРАТУРНЫХ ИСПЫТАНИЙ ВОЕННЫХ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2005 |
|
RU2293959C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СВЕТОРАССЕЯНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2329475C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ПЕЛЕНГАТОР | 2001 |
|
RU2197003C2 |
| СПОСОБ СКРЫТИЯ ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ ОТ ЛАЗЕРНЫХ ЛОКАЦИОННЫХ СИСТЕМ | 2020 |
|
RU2751644C1 |
| Определитель параметров ветра дистанционный пассивный | 2023 |
|
RU2801433C1 |
| КОСМИЧЕСКИЙ ТЕЛЕСКОП | 2012 |
|
RU2529052C2 |
Изобретение относится к метеорологии к способам для определения физических параметров атмосферы и позволяет получать информацию о высоте нижней границы облачности путем измерения расстояния до выбранного в качестве объекта измерения фрагмента облачности. Техническим результатом изобретения является повышение достоверности и точности определения расстояния до выбранного в качестве объекта измерения фрагмента нижней облачности, имеющего заранее неизвестные линейные размеры. Высота нижней границы облачности определяется путем получения двух разномасштабных изображений выбранного в качестве объекта измерения фрагмента нижней облачности посредством двух идентичных оптико-электронных приборов, которые располагают так, чтобы их вертикальные линии визирования совпадали, передние главные плоскости оптических систем были совмещены, при этом оптические системы оптико-электронных приборов имеют различные фокусные расстояния. 1 ил.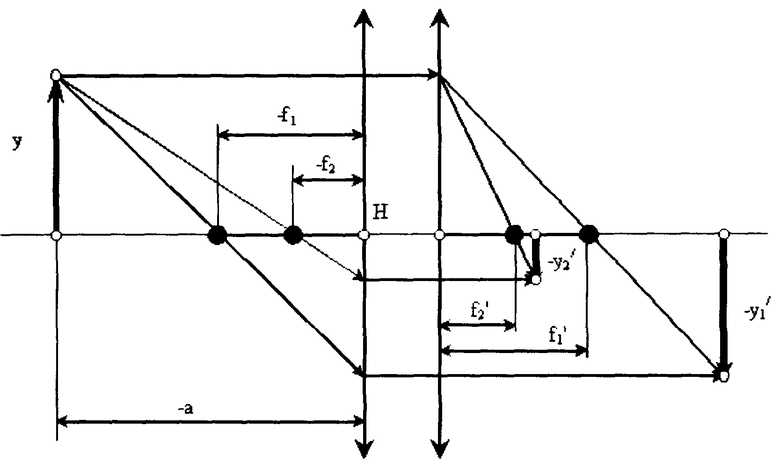
Моностатический способ определения высоты нижней границы облачности, по которому получают два разномасштабных изображения выбранного в качестве объекта измерения фрагмента нижней границы облачности, определяют размеры этих изображений, рассчитывают высоту нижней границы облачности, отличающийся тем, что измерения производят одновременно посредством двух идентичных оптико-электронных приборов, которые располагают так, чтобы их вертикальные линии визирования совпадали, а передние главные плоскости оптических систем были совмещены, при этом оптические системы оптико-электронных приборов имеют отличные друг от друга фокусные расстояния, высоту определяют по формуле
 ,
,
где y'1 - размер изображения объекта измерения в плоскости изображения первого оптико-электронного прибора;
y'2 - размер изображения объекта измерения в плоскости изображения второго оптико-электронного прибора;
f'1 - фокусное расстояние оптической системы первого оптико-электронного прибора;
f'2 - фокусное расстояние оптической системы второго оптико-электронного прибора.
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ | 1993 |
|
RU2106658C1 |
| Лазерный доплеровский измеритель скорости | 1990 |
|
SU1748071A1 |
| Способ определения характеристик ударной волны в атмосфере | 1991 |
|
SU1812536A1 |
| ПРОСТРАНСТВЕННО-ВРЕМЕННАЯ СИСТЕМА РЕАЛЬНОГО ВРЕМЕНИ | 2005 |
|
RU2274953C1 |

