Изобретение относится к способу эксплуатации емкостного микроэлектромеханического датчика, содержащего по меньшей мере один дифференциальный конденсатор, образованный двумя неподвижными электродами, между которыми упруго подвешен с возможностью смещения под действием внешней силы, которое может быть измерено, подвижный центральный электрод, согласно которому между неподвижными электродами и центральным электродом подают возбуждающее напряжения противоположного знака. Изобретение также относится к схеме для эксплуатации электромеханического датчика упомянутого типа.
Под термином микроэлектромеханические датчики (именуемые также датчиками МЭМС) понимают микроэлектромеханические датчики ускорения, микроэлектромеханические датчики частоты вращения и микроэлектромеханические датчики с электростатическими двигателями.
Базовый вариант датчика содержит дифференциальный конденсатор, центральный электрод которого упруго подвешен таким образом, что реагирует отклонением на приложенные к нему усилия. Отклонение измеряют с помощью соответствующих известных средств измерения. В системе восстановления (с замкнутой обратной связью) измеренное значение подают на контроллер, который воздействует на электростатические силы, действующие на пластины дифференциального конденсатора, с тем чтобы компенсировать внешнее воздействие. Эту операцию называют восстановлением. Восстановление будет полным (абсолютным) при отклонении центрального электрода, равном "0".
Задачей изобретения является значительное повышение точности подобных микроэлектромеханических датчиков.
Изобретение изначально основано на понимании того, что сила, соответствующим образом воздействующая на отклонение центрального дифференциального электрода, состоит из (внешней) ускоряющей силы и (внутренней) электростатической (восстанавливающей) силы.
Исходя из этого понимания, в соответствии с настоящим изобретением предложен способ эксплуатации емкостного микроэлектромеханического датчика, в целом указанного выше, согласно которому компенсируют составляющую, соответствующую электростатической восстанавливающей силе, именуемую далее "помехой восстановления» и наложенную на выходной сигнал считывания (измеренное значение).
Изобретение основано на схеме для эксплуатации микроэлектромеханического датчика, содержащего по меньшей мере один дифференциальный конденсатор, состоящий из двух неподвижных электродов, между которыми упруго подвешен с возможностью отклонения под действием внешней силы подвижный центральный электрод, содержащей средства подачи возбуждающего напряжения противоположной полярности на два неподвижных электрода и средства вывода в виде измеренного напряжения, значения отклонения центрального электрода при воздействии на него силы. Изобретение отличается тем, что оно содержит устройство для компенсации искажения измеренного значения (сигнала считывания), именуемого "помехой восстановления".
В одном из предпочтительных вариантов реализации предлагаемого способа эксплуатации сигнал, соответствующий помехе восстановления, суммируют с выходным сигналом принципиальной схемы микромеханического датчика, а сумму выводят в форме сигнала считывания, который показывает отклонение центрального электрода. Во время предпочтительной эксплуатации датчика с замкнутой обратной связью выходной сигнал считывания через контроллер дополнительно воздействует на сигнал помехи восстановления, так что результирующая емкость восстанавливающей силы противодействует отклонению центрального электрода с компенсацией этого отклонения.
Для предотвращения дрейфа (смещения) выходного сигнала считывания датчика целесообразно постоянно изменять полярность возбуждающего напряжения, приложенного к неподвижным электродам, согласно детерминированному или стохастическому способу изменения полярности.
Согласно изобретению схема для эксплуатации микроэлектромеханического датчика общего типа содержит устройство для компенсации искажения измеренного значения, именуемого помехой восстановления. Измеренное значение с датчика может быть выведено, например, в виде значения напряжения, и в этом случае целесообразно обеспечить суммирование значения напряжения восстановления, соответствующего помехе восстановления, со значением выходного напряжения, создаваемого основным устройством датчика. В этом случае применяют контроллер, на вход которого подан выходной сигнал считывания, очищенный от помехи восстановления, причем указанный контроллер регулирует значение напряжения восстановления при отклонении центрального электрода таким образом, что образованная в результате емкостная восстанавливающая сила противодействует отклонению центрального электрода.
Контроллер может представлять собой контроллер пропорционального типа (Р-контроллер) с частотно-зависимым коэффициентом усиления, либо пропорционально-интегрального типа (PI контроллер) с частотно-зависимым коэффициентом усиления. PI контроллер может быть образован операционным усилителем с комплексным каналом обратной связи, который сформирован последовательным соединением безреактивного сопротивления и емкости. При создании условий для предотвращения дрейфа сигнала считывания путем детерминированного или стохастического способа изменения полярности возбуждающего напряжения на неподвижных электродах дифференциального конденсатора PI контроллер должен быть выполнен с возможностью соответствующего изменения полярности емкости в комплексном импедансе обратной связи PI контроллера.
Ниже приведено более подробное описание изобретения на примере вариантов его реализации.
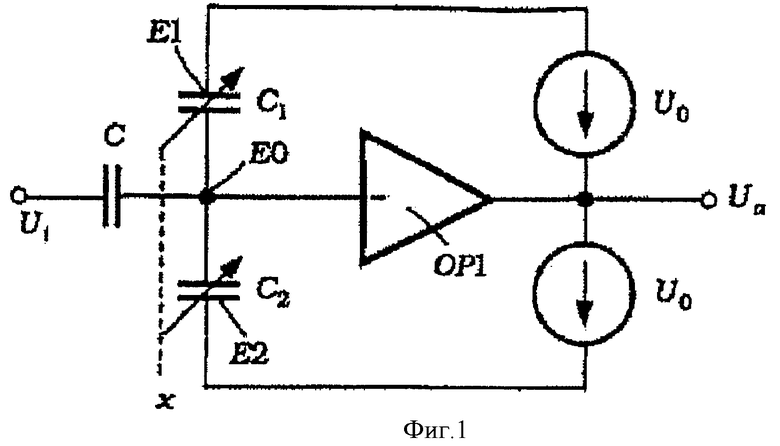
На фиг.1 представлена первая принципиальная схема емкостного микроэлектромеханического датчика с дифференциальным конденсатором, в котором эталонный конденсатор С может быть образован двумя переменными емкостями, соединенными параллельно;
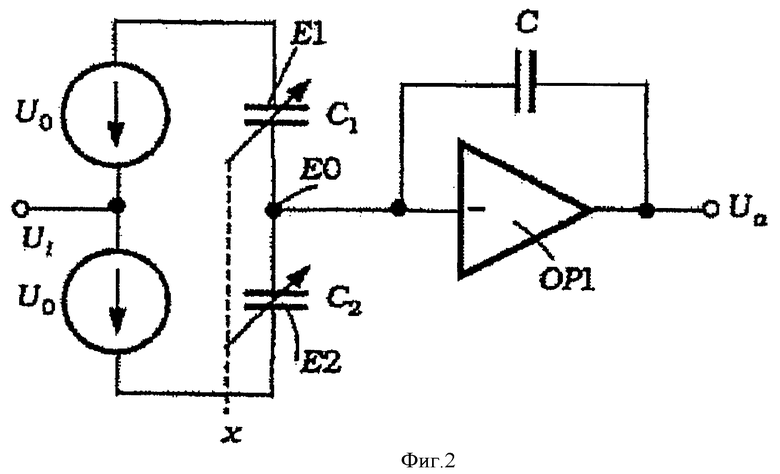
на фиг.2 представлен вариант принципиальной схемы по Фиг.1 для эксплуатации микроэлектромеханического датчика с дифференциальным конденсатором;
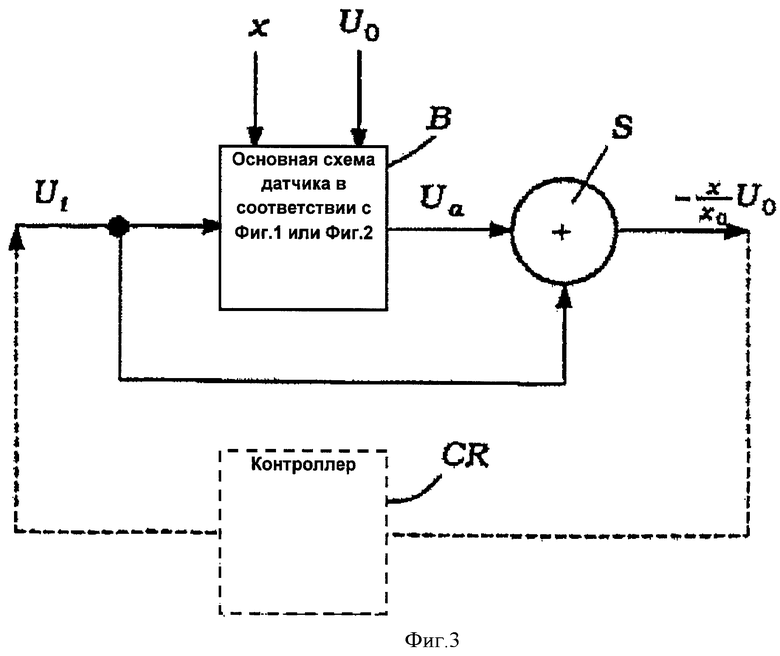
на фиг.3 представлена основная блок-схема, которая иллюстрирует как согласно изобретению компенсировать так называемую помеху восстановления;
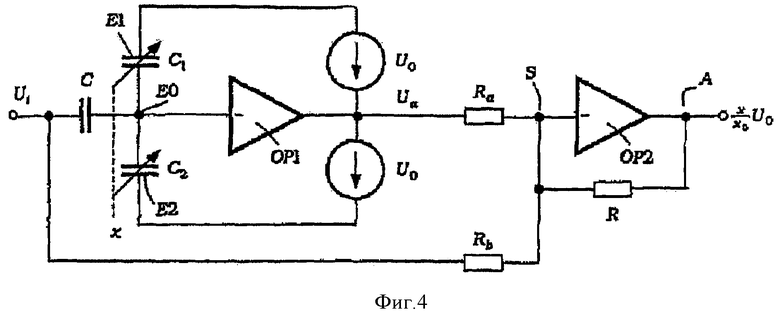
на фиг.4 приведен первый пример схемы для компенсации помехи восстановления, иллюстрирующий применение принципиальной схемы, изображенной на Фиг.1, при реализации устройства, показанного на Фиг.3;
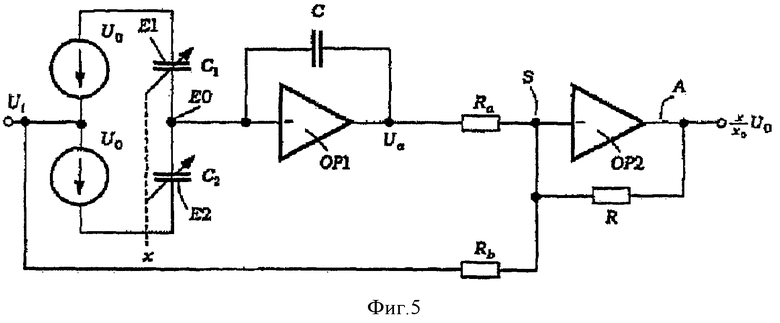
на фиг.5 представлен вариант реализации схемы компенсации помехи восстановления согласно Фиг.3 с использованием принципиальной схемы датчика, показанной на Фиг.2;
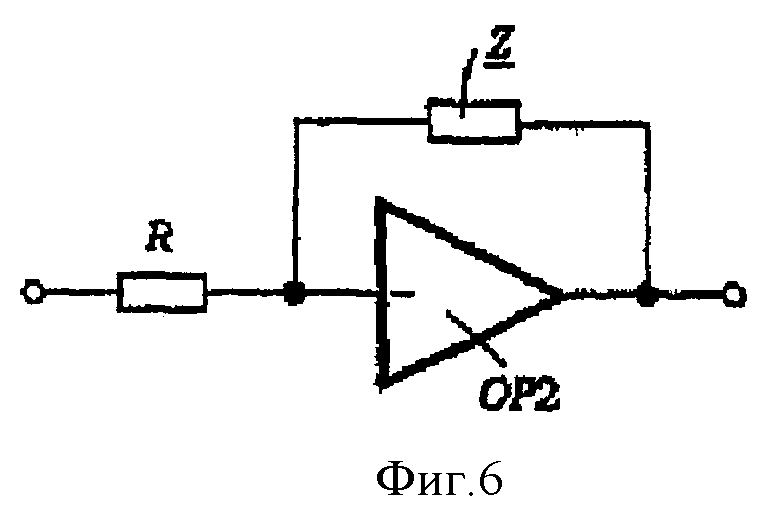
на фиг.6 приведен пример принципиальной схемы инвертирующего контроллера, которая может быть применена в варианте устройства (показанном пунктирной линией на Фиг.3) датчика, включенного в систему обратной связи;
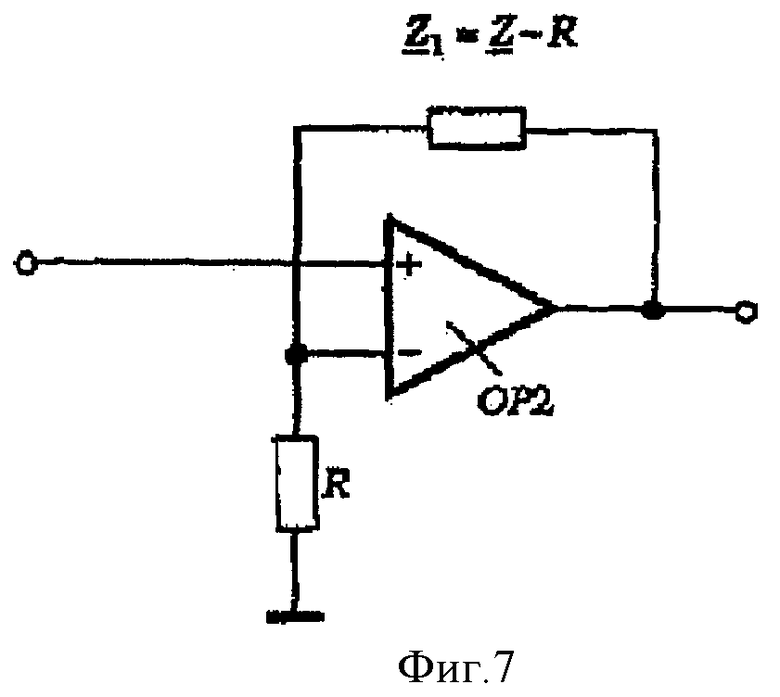
на фиг.7 представлена принципиальная схема неинвертирующего контроллера;
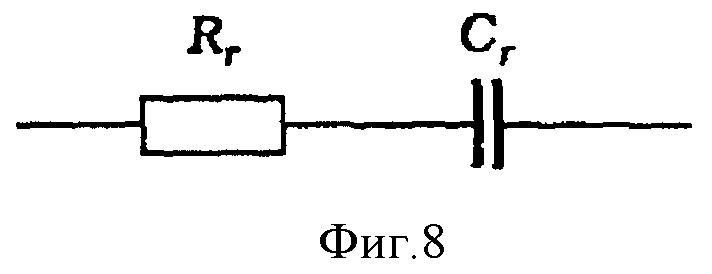
на фиг.8 представлен импеданс канала обратной связи при использовании PI контроллера в устройстве микроэлектромеханического датчика с замкнутой обратной связью;
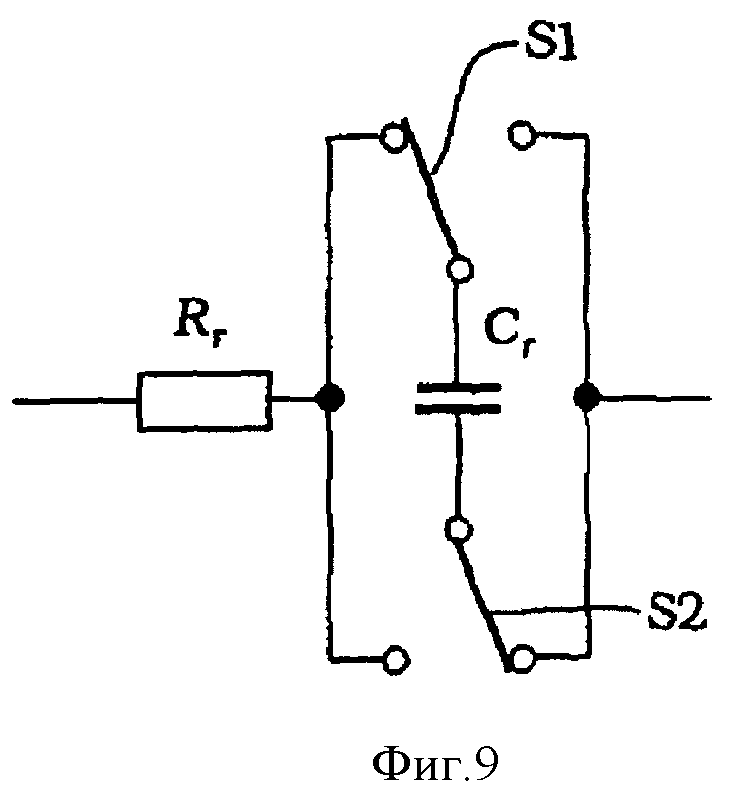
на фиг.9 представлен импеданс PI контроллера, соответствующего показанному на Фиг.8, но с конденсатором, полярность которого может быть изменена на обратную при детерминированном или стохастическом изменении полярности возбуждающего напряжения на выводах дифференциального конденсатора;
на фиг.10 приведен первый пример реализации комбинации управления и компенсации в устройстве микроэлектромеханического датчика с обратной связью, обладающего свойствами, соответствующими настоящему изобретению;
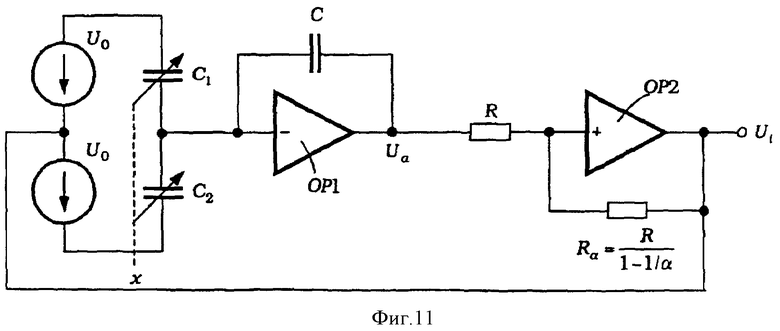
на фиг.11 представлен второй вариант принципиальной схемы, который соответствует комбинации управления и компенсации в схеме, показанной на Фиг.10, но с применением базовой схемы, приведенной на Фиг.2;
на фиг.12 представлена полная схема микроэлектромеханического датчика с PI контроллером и детерминированным/стохастическим изменением полярности возбуждающего напряжения и конденсатора, в цепи обратной связи PI контроллера.
Узлы или детали, которые функционально соответствуют друг другу, обозначены на всех чертежах одними и теми же номерами.
На фиг.1 и 2 представлены две основные схемы, которые обеспечивают функцию считывания отклонения х подвижного центрального электрода E0 микроэлектромеханического датчика и обеспечивают воздействие на него заданной восстанавливающей силы. Ниже рассмотрены принципы построения контура управления с замкнутой обратной связью.
На фиг.1 представлена первая основная схема емкостного микроэлектромеханического датчика, который содержит герметизированный дифференциальный конденсатор (см. фиг.12). Дифференциальный конденсатор сформирован емкостями С1 и С2 между неподвижными электродами Е1 и Е2 и упруго подвешенным центральным электродом E0, линеаризированная (линейная) зависимость отклонения х которого имеет вид:
Одно и то же возбуждающее напряжение U0 приложено и к неподвижным электродам Е1 и Е2, и - с противоположной полярностью - к выходу операционного усилителя ОР1, со входом которого связан центральный электрод Е0. На выходе операционного усилителя ОР1 получают значение выходного напряжения Ua. Кроме того, к центральному электроду Е0 через эталонный конденсатор С приложено напряжение Ui, значение которого разъяснено ниже. Для достижения баланса электрического моста, который не зависит от отклонения центрального электрода E0, температуры и старения, целесообразно, чтобы эталонный конденсатор С был сформирован путем параллельного соединения двух переменных емкостей Са1 (х) и Са2 (х) (см. фиг.1а), значения которых изменяются в зависимости от отклонения x.

Если выбирают Ca1(x)~C1(x) и Са2(х)~С2(х), то независимо от отклонения получают

Этот критерий применим для всех микроэлектромеханических датчиков с помехами восстановления, даже для микромеханических Кориолисовых гироскопов.
Ниже рассмотрены функции считывания и функции восстановления первой принципиальной схемы микроэлектромеханического датчика с дифференциальным конденсатором.
Со ссылкой на фиг.1 значения зарядов Q1, Q2 в дифференциальном конденсаторе могут быть найдены из следующих уравнений:


Для эталонного конденсатора С справедливо:

Общий узел схемы, то есть центральный электрод Е0, расположен на виртуальной "земле" Закон Кирхгофа:

Выполняется для идеального операционного усилителя OP1. Из уравнений (3)-(6) следует, что

либо при использовании уравнений (1) и (2)




В уравнениях (1)-(11) x0 использовано для обозначения начала отсчета отклонения х, а С0 использовано для обозначения суммы двух частичных емкостей С1, С2 в положении покоя дифференциального конденсатора (х=0). Как видно из уравнения (11), член Ua уравнения выходного напряжения основного устройства датчика состоит из двух частей. Первая часть - функция считывания, которая зависит от отклонения х. Вторая часть зависит от Ui, где Ui определяет величину внутренней электростатической силы (восстанавливающей силы), как показано в следующем разделе, и использована для возврата датчика в исходное состояние. Здесь и в приведенном ниже описании эта вторая (нежелательная) часть может быть названа помехой восстановления.
Более подробное объяснение функции восстановления дано ниже. При подаче напряжений на дифференциальный конденсатор для элемента конденсатора C1 справедливо следующее уравнение:

а для элемента конденсатора С2:

Электростатические силы, которые, в совокупности, действуют на подвижный электрод Е0 дифференциального конденсатора, могут быть выражены следующим образом:



Электростатическая сила F состоит из части, которая зависит от Ui, внутренней электростатической силы и (нежелательной) части, которая зависит от отклонения х, соответствует внешней ускоряющей силе и определяется отрицательной постоянной динамической жесткости.
На фиг.2 представлен второй вариант принципиальной схемы управления микроэлектромеханическим датчиком с дифференциальным конденсатором. В этой схеме конденсатор С подключен параллельно операционному усилителю ОР1 в качестве непосредственной обратной связи. Математический анализ показывает, что роли напряжения Ui и Ua существенно изменились по сравнению с принципиальной схемой, представленной на фиг.1.
Функция считывания может быть выражена следующим образом:

В этом случае первый член напряжения считывания Ua принципиальной схемы датчика также представляет собой функцию считывания, которая зависит от отклонения х, а второй член - помеха восстановления.
Функция восстановления части, относящейся к внутренней электростатической силе, может быть выражена следующим образом (аналогично уравнению (17)):
Более подробное описание компенсации помехи восстановления согласно изобретению представлено ниже.
Как видно из уравнений (11) и (19), на выходы двух вариантов схемы по фиг.1 и 2 подают напряжение считывания Ua, которое, в дополнение к составляющей, определяемой отклонением х, может содержать также составляющую, именуемую помехой восстановления, и зависит от Ui. Если микроэлектромеханические датчики предназначены для использования во время работы системы с обратной связью, то эти помехи должны быть компенсированы. Без ограничения применимости, С=С0. В обоих случаях, из уравнений (11) и (19) может быть получено:
Если рассматривать основную принципиальную схему, представленную на фиг.3, которая включает в себя основную схему датчика В, показанную на фиг.1 или фиг.2, с входными переменными отклонения х и возбуждающего напряжения U0, то при суммировании напряжения восстановления Ui с выходным сигналом Ua основной схемы датчика в точке S суммирования получают сигнал считывания, которой не содержит Ui и может быть выражен в виде  . Теперь, если сигнал считывания подают на контроллер CR, то получится замкнутая обратная связь, это изображено пунктирными линиями на фиг.3.
. Теперь, если сигнал считывания подают на контроллер CR, то получится замкнутая обратная связь, это изображено пунктирными линиями на фиг.3.
На фиг.4 и 5 приведены примеры схем, которые иллюстрируют как компенсировать помеху восстановления в схемах, показанных на фиг.1 и 2, соответственно. Элементы и функции, которые уже описаны на примере фиг.1 и фиг.2, повторно не описаны. Напряжение восстановления Ui прибавляется в точке S. При этом на выходе А с помощью развязывающего операционного усилителя OP2, может быть получен сигнал считывания с соответствующим математическим знаком.
Во время работы с замкнутой обратной связью контроллер должен срабатывать правильно, то есть при отклонении х Ui регулируют таким образом, что результирующая восстанавливающая сила противодействует отклонению. Это означает, что в схеме, показанной на фиг.4, необходим неинвертирующий контроллер, а в схеме, показанной на фиг.5, - инвертирующий контроллер.
Если эталонный конденсатор С и дифференциальный конденсатор C0, сформированный частичными емкостями С1, С2 и отдельными резисторами Ra, Rb, реализованы на основе одной и той же технологии, то может быть соблюдено уравновешенное состояние C/С0=Ra/Rb во времени и в случае изменения температуры.
Ниже представлен один вариант реализации контроллера во время работы системы с обратной связью.
Контроллер должен обеспечивать противодействие отклонению х. Этот контроллер включает в себя усилитель с коэффициентом усиления а, который может зависеть от частоты. Кроме того, контроллер может быть сформирован, например, в виде контроллера пропорционального типа (Р контроллера) с частотно-независимым коэффициентом усиления а, либо в виде контроллера пропорционально-интегрального типа (PI контроллер) с частотно-зависимым коэффициентом усиления (α=β+1/jωγ). Также, контроллер должен обеспечивать соответствующий математический знак коэффициента усиления. Таким образом, необходимо проводить различие между инвертирующим контроллером (фиг.6) и неинвертирующим контроллером (фиг.7). Коэффициент усиления операционного усилителя ОР2 может быть получен из выражения:
где отрицательный математический знак (-) относится к контроллеру, показанному на фиг.6, а положительный математический знак (+) относится к контроллеру, показанному на фиг.7. Z описывает (в комплексной форме) импеданс, который в общем случае зависит от частоты. Z может быть использован для задания характеристики контроллера. В пропорциональном контроллере (согласно фиг.6), в качестве  может быть использован нереактивный резистор, в то время как в пропорционально-интегральном контроллере должна быть создана последовательная цепь, содержащая нереактивный резистор Rr и конденсатор Cr (см. фиг.8).
может быть использован нереактивный резистор, в то время как в пропорционально-интегральном контроллере должна быть создана последовательная цепь, содержащая нереактивный резистор Rr и конденсатор Cr (см. фиг.8).
Необходимо отметить, что токи смещения операционного усилителя ОР1 (на чертежах слева) могут вызвать дрейф нулевой точки. В соответствии с полезным дополнением к настоящему изобретению противодействие этому дрейфу может быть обеспечено путем изменения полярности возбуждающего напряжения U0, например, через равные промежутки времени, и посредством включения высокоомного резистора R∞, между выводом операционного усилителя OP1 и его инвертирующим входом. Как указано выше, математический знак U0 может быть учтен и в выходном коэффициенте, и в математическом знаке силы, в результате чего математический знак контроллера останется неизменным. Полярность U0 может быть изменена как периодически, так и по закону случайной или псевдослучайной функции. Затем можно определить ток смещения операционного усилителя OP1.
В случае изменения полярности U0 в соответствии с определенной функцией полярность конденсатора Cr импеданса PI контроллера должна изменяться в соответствии с той же функцией, как это реализовано в схеме, показанной на фиг.9.
В одном из наиболее предпочтительных вариантов реализации изобретения, описание которого приведено ниже, реализована комбинация компенсации помехи восстановления и управления работой микроэлектромеханического датчика с замкнутой обратной связью.
Функции компенсации помехи восстановления и управления могут быть объединены. На фиг.10 представлена схема, которая в этом случае получается из первого варианта, показанного на фиг.1. В этом случае, сопротивление

использовано для задания коэффициента усиления α контроллера; при Rα=R он превращается в бесконечность. Необходимо отметить, что указанные соотношения могут быть применены только при С=С0. Если это условие не выполнено, должен быть соответственно изменен масштаб Rα.
Аналогичным образом, схема, показанная на фиг.11, получается из второй основной схемы, которая представлена на фиг.2. В этом случае, коэффициент усиления α контроллера может быть задан исходя из:
при Rα=R превращается в бесконечность.
Необходимо отметить, что обе схемы, показанные на фиг.10 и 11, должны соответствовать условию уравновешенного состояния, которое должно быть принято во внимание при определении допустимых отклонений используемых компонентов.
На фиг.12 приведен пример осуществления функциональной схемы восстанавливающегося микроэлектромеханического датчика с обратной связью, который обладает свойствами в соответствии с настоящим изобретением. Этот пример осуществления основан на первом варианте основной схемы в соостветствии фиг.1 и включает PI контроллер с комплексным импедансом цепи обратной связи в соответствии с фиг.9. Возбуждающее напряжение U0, которое снабжено, по вышеупомянутым причинам, переключателем полярности RS, управляемым либо периодически, либо в соответствии с псевдослучайной функцией, введено здесь не беспотенциальными источниками напряжения, а через суммирующие усилители SV1 и SV2. Эти суммирующие усилители SV1, SV2 включены в контур управления и имеют коэффициент усиления "2". Этот дополнительный коэффициент усиления может быть учтен посредством соответствующего выбора параметров в другой точке схемы. Для изменения полярности конденсатора Cr импеданса Z PI контроллера переключатель полярности RS одновременно приводит в действие переключатели S1, S2.


Изобретение относится к способу эксплуатации емкостного микроэлектромеханического датчика. Датчик содержит по меньшей мере один дифференциальный конденсатор, образованный двумя неподвижными электродами, между которыми упруго подвешен с возможностью смещения под действием внешней силы, которое может быть измерено, и подвижный центральный электрод. Способ эксплуатации емкостного датчика, согласно которому между неподвижными электродами и центральным электродом прикладывают одинаковые, но противоположно направленные возбуждающие напряжения, а отклонение центрального электрода измеряют, при этом компенсируют часть заряда, которая может быть снята с центрального электрода и которая соответствует электростатической восстанавливающей силе и именуется помехой восстановления. Технический результат - значительное повышение точности микроэлектромеханического датчика. 2 н. и 12 з.п. ф-лы, 12 ил.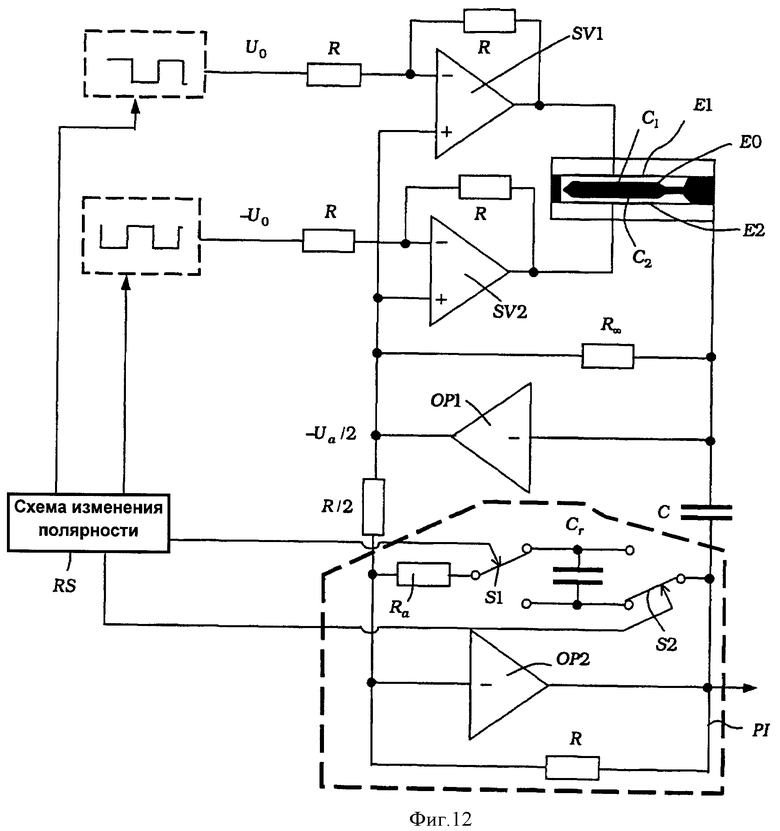
1. Способ эксплуатации емкостного микроэлектромеханического датчика, содержащего, по меньшей мере, один дифференциальный конденсатор, сформированный двумя неподвижными электродами (E1, E2), между которыми упруго подвешен с возможностью отклонения под действием внешней силы подвижный центральный электрод (Е0), согласно которому между неподвижными электродами и центральным электродом прикладывают одинаковые, но противоположно направленные возбуждающие напряжения (U0), а отклонение центрального электрода измеряют, отличающийся тем, что компенсируют часть заряда, которая может быть снята с центрального электрода и которая соответствует электростатической восстанавливающей силе и именуется помехой восстановления.
2. Способ по п.1, отличающийся тем, что сигнал, соответствующий помехе восстановления (Ui), суммируют с выходным сигналом (Ua) основного устройства емкостного микроэлектромеханического датчика, а сумму выдают в виде выходного сигнала для считывания, который показывает отклонение центрального электрода.
3. Способ по п.2, отличающийся тем, что при работе датчика с замкнутой обратной связью указанный выходной сигнал через контроллер (CR) дополнительно воздействует на сигнал помехи восстановления, так что результирующая емкостная восстанавливающая сила противодействует отклонению центрального электрода с компенсацией этого отклонения.
4. Способ по п.2, отличающийся тем, что дрейф нулевой точки датчика предотвращают путем детерминированного изменения полярности возбуждающего напряжения (±U0).
5. Способ по п.2, отличающийся тем, что дрейф нулевой точки датчика предотвращают путем стохастического изменения полярности возбуждающего напряжения (±U0).
6. Способ по п.3, отличающийся тем, что для создания емкостной восстанавливающей силы применяют пропорционально-интегральный контроллер.
7. Схема для эксплуатации микроэлектромеханического датчика, имеющего, по меньшей мере, один дифференциальный конденсатор, сформированный двумя неподвижными электродами (Е1, Е2), между которыми упруго подвешен подвижный центральный электрод (Е0), выполненный с возможностью отклонения под действием внешней силы, содержащая средства подачи соответствующего возбуждающего напряжения (±U0) противоположной полярности на два неподвижных электрода, а также средства вывода, в виде измеренного значения, отклонения центрального электрода, при воздействии на него силы, отличающаяся тем, что она содержит устройство для компенсации электростатической восстанавливающей силы, именуемой помехой восстановления, которая приложена к центральному электроду.
8. Схема по п.7, в которой измеренное значение выведено на выход в виде значения напряжения, отличающаяся тем, что она содержит устройство (S) для суммирования значения напряжения восстановления (Ui), величина которого соответствует помехе восстановления, и значения выходного напряжения (Uа) основного устройства датчика.
9. Схема по п.8, содержащая контроллер, на вход которого подан выходной сигнал считывания, очищенный от помехи восстановления, причем указанный контроллер регулирует значение напряжения восстановления при отклонении центрального электрода таким образом, что создаваемая емкостная восстанавливающая сила противодействует отклонению центрального электрода.
10. Схема по п.9, отличающаяся тем, что она содержит детерминированную или стохастическую систему управления переключением полярности (RS) возбуждающего напряжения (±U0).
11. Схема по п.10, отличающаяся тем, что в качестве контроллера выбран пропорциональный контроллер с частотно-зависимым коэффициентом усиления.
12. Схема по п.10, отличающаяся тем, что в качестве контроллера выбран пропорционально-интегральный контроллер с частотно-зависимым коэффициентом усиления.
13. Схема по п.12, отличающаяся тем, что пропорционально-интегральный контроллер сформирован операционным усилителем (ОР2) с комплексным каналом обратной связи, который, в свою очередь, образован последовательным соединением нереактивного резистора (Rr) и емкости (Сr).
14. Схема по п.10, отличающаяся тем, что в качестве контроллера выбран пропорционально-интегральный контроллер с частотно-зависимым усилителем, который сформирован операционным усилителем с последовательным контуром, содержащим нереактивный резистор (Rr) и емкость (Сr), полярность которой может быть переключена переключателем полярности (S1, S2), выполненным с возможностью приведения в действие устройством (RS) для переключения полярности возбуждающего напряжения (±U0).
| US 2006061372 A1, 23.03.2006 | |||
| US 6218632 В1, 17.04.2001 | |||
| DE 102004039924 A1, 23.02.2006 | |||
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ АКСЕЛЕРОМЕТРА | 2001 |
|
RU2186400C1 |

