Изобретение относится к микроэлектромеханическому датчику и способу его применения.
Микроэлектромеханические датчики составляют основу многих технических изделий. Микроэлектромеханические датчики целесообразно применять, например, в навигации, где их используют в качестве кориолисовых гироскопов. Принцип действия микроэлектромеханического датчика пояснен ниже на примере кориолисова гироскопа.
Кориолисовы гироскопы имеют систему масс, которую можно вынудить колебаться. Обычно система масс имеет множество колебательных мод, которые изначально независимы друг от друга. При работе кориолисова гироскопа, то есть при работе микроэлектромеханического датчика, искусственно возбуждают конкретную колебательную моду системы масс, именуемую далее "возбужденные колебания". При вращении кориолисова гироскопа возникают кориолисовы силы, которые получают энергию от возбужденных колебаний системы масс и передают ее следующей колебательной моде системы масс, именуемой далее "считываемые колебания". Для определения поворота кориолисова гироскопа выделяют считываемые колебания и анализируют соответствующий считываемый сигнал на изменения амплитуды считываемых колебаний, представляющих меру поворота кориолисова гироскопа. Кориолисовы гироскопы могут быть выполнены в виде разомкнутой и в виде замкнутой системы. В замкнутой системе амплитуду считываемых колебаний непрерывно возвращают к фиксированному значению - предпочтительно нулю - благодаря соответствующим управляющим контурам, а возвратные силы измеряют.
Систему масс, также далее именуемую "резонатор", кориолисова гироскопа, или в более широком смысле микроэлектромеханического датчика, можно в этом случае компоновать различными способами. Например, можно использовать систему масс, выполненную в виде одной детали. Также можно разделить систему масс на два осциллятора, которые связаны между собой упругой системой и могут совершать относительные перемещения по отношению друг к другу.
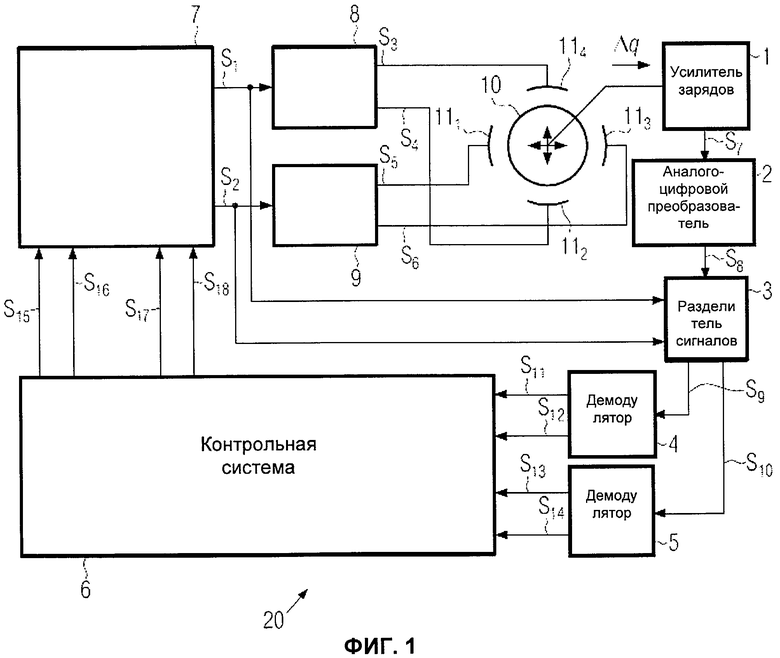
На фиг.1 схематично изображен известный вариант реализации корилиосова гироскопа 20. Гироскоп 20 содержит усилитель 1 заряда, аналого-цифровой преобразователь 2, разделитель 3 сигналов, демодуляторы 4, 5, управляющую систему 6, модулятор 7, формирователи 8, 9, резонатор 10 и электродную систему 11, содержащую четыре электрода 111-114.
Резонатор 10 может быть возбужден для выработки колебаний с помощью электродов 111-114. Кроме того, с помощью электродов 111-114 можно электростатическим способом установить или изменить жесткость резонатора 10. Перемещение резонатора 10 определяют путем измерения переноса заряда Δq на электрод, расположенный на резонаторе 10 ("подвижный центральный электрод"), вызванного перемещением резонатора 10 в электростатическом поле, сгенерированном электродами 111-114. Усилитель 1 выдает сигнал S7, пропорциональный переносу заряда, на преобразователь 2, который преобразует его в соответствующий цифровой сигнал S8, подаваемый на разделитель 3. Из этого сигнала с помощью демодуляторов 4, 5, системы 6, модулятора 7 и формирователей 8, 9 получают сигналы S3-S6, которые подают на электроды 111-114 и обеспечивают компенсацию смещений резонатора 10, вызванных кориолисовыми силами. Более подробно работа гироскопа 20 описана, например, в описании изобретения в патенте DE 10320675.
Задачей изобретения является создание микроэлектромеханического датчика, например емкостного или пьезоэлектрическиого датчика, обладающего максимально широкими функциональными возможностями, несмотря на небольшое количество его электродов.
Эта задача решена посредством предложенного в п.1 формулы изобретения микроэлектромеханического датчика. Кроме того, согласно п.11 формулы изобретения изобретение предлагает способ применения микроэлектромеханического датчика. Предпочтительные конфигурации и усовершенствования конструкции изобретения представлены в зависимых пунктах формулы.
В соответствии с изобретением предложен микроэлектромеханический датчик, который содержит:
- по меньшей мере один подвижный электрод,
- электродную систему, отстоящую на некоторое расстояние от указанного электрода и содержащую электроды, выполненные с возможностью раздельного управления и подачи на них соответствующих электродных сигналов, которые могут быть использованы для установления и/или изменения электростатическим способом прикладываемой силы, жесткости и коэффициента считывания подвижного электрода,
- блок выработки электродных сигналов, который соединен с электродной системой и на который могут быть поданы сигнал прикладываемой силы, сигнал жесткости и сигнал коэффициента усиления при считывании выходного сигнала, задающие установление и/или изменения прикладываемой силы, жесткости и коэффициента усиления при считывании выходного сигнала подвижного электрода, которые необходимо выполнить,
причем указанный блок вырабатывает электродные сигналы в зависимости от сигнала прикладываемой силы, сигнала жесткости и сигнала коэффициента усиления при считывании выходного сигнала и согласовывает электродные сигналы между собой таким образом, что прикладываемая сила, жесткость и коэффициент усиления при считывании выходного сигнала подвижного электрода могут быть установлены и/или изменены до конкретных требуемых значений независимо друг от друга.
Изобретение основано на понимании того, что электродные сигналы любой требуемой электродной системы можно согласовать между собой таким образом, что прикладываемая сила, жесткость и коэффициент усиления при считывании выходного сигнала подвижного электрода могут быть установлены и/или изменены до конкретных требуемых значений независимо друг от друга, что обеспечивает максимальную гибкость способа применения микроэлектромеханического датчика. Здесь под термином "любая требуемая электродная система" понимают любую требуемую трехмерную систему по меньшей мере из трех электродов.
Как уже было упомянуто, систему масс, также именуемую далее "резонатором", микроэлектромеханического датчика можно компоновать различными способами. Например, можно использовать систему масс, выполненную в виде одной детали. Также можно разделить систему масс на два осциллятора, которые связаны между собой упругой системой и могут совершать относительные перемещения по отношению друг к другу.
В одном из вариантов реализации изобретения датчик снабжен блоком переноса заряда, который регистрирует переносы заряда, возникающие на подвижном электроде, а мгновенное перемещение подвижного электрода можно определить с помощью оценочного блока на основе зарегистрированного переноса заряда.
В одном из вариантов реализации изобретения блок выработки электродного сигнала вырабатывает электродные сигналы электрода в зависимости от сигнала прикладываемой силы, сигнала жесткости и сигнала коэффициента усиления при считывании выходного сигнала таким образом, что перенос заряда, зарегистрированный на подвижном электроде, содержит только те составляющие переноса заряда, которые возникают в результате движения подвижного электрода и которые зависят от значения коэффициента усиления при считывании выходного сигнала. В этом случае коэффициент усиления при считывании выходного сигнала следует толковать как коэффициент усиления при считывании движения подвижного электрода.
Электродная система может содержать четное или нечетное количество электродов. Кроме того, размеры и конструкция отдельных электродов могут отличаться друг от друга. В одном из предпочтительных вариантов реализации изобретения электродная система содержит четыре предпочтительно идентичных электрода, которые могут быть сгруппированы, например, в две электродные пары. При этом электроды расположены симметрично по отношению к первой оси, которая отделяет эти электродные пары друг от друга, и симметрично по отношению ко второй оси, которая отделяет электроды соответствующих пар друг от друга. Целесообразно, чтобы подвижный электрод был расположен центросимметрично по отношению к точке пересечения указанных двух осей симметрии.
В варианте реализации изобретения, в котором подвижный электрод выполнен в виде части резонатора, подвижный электрод может быть возбужден для выработки колебаний, а датчик может быть использован, например, как кориолисов гироскоп.
В варианте реализации изобретения, содержащем два подвижных электрода, две электродных системы и два блока выработки электродных сигналов, сигналы с указанных подвижных электродов можно считывать отдельно друг от друга путем соответствующего выбора двух коэффициентов считывания и перемещений, на которые воздействуют посредством прикладываемой силы, а жесткости можно устанавливать независимо друг от друга.
Кроме того, в соответствии с изобретением предложен способ применения микроэлектромеханического датчика, содержащего подвижный электрод и электродную систему, отстоящую на некоторое расстояние от него и содержащую электроды, выполненные с возможностью раздельного управления и подачи на них соответствующих электродных сигналов, согласно которому:
- вырабатывают электродные сигналы в зависимости от сигнала прикладываемой силы, сигнала жесткости и сигнала коэффициента усиления при считывании выходного сигнала, которые задают установление и/или изменения перемещения, жесткости и коэффициента усиления при считывании выходного сигнала подвижного электрода, которые необходимо выполнить,
- подают на соответствующие электроды электродные сигналы для установления и/или изменения электростатическим способом прикладываемой силы, жесткости и коэффициента усиления при считывании выходного сигнала подвижного электрода, причем электродные сигналы вырабатывают в зависимости от сигнала прикладываемой силы, сигнала жесткости и сигнала коэффициента усиления при считывании выходного сигнала и согласовывают электродные сигналы между собой таким образом, что прикладываемую силу, жесткость и коэффициент усиления при считывании выходного сигнала подвижного электрода устанавливают и/или изменяют до конкретных требуемых значений независимо друг от друга.
Ниже приведено более подробное описание изобретения на примере вариантов его реализации со ссылками на чертежи, на которых:
на фиг.1 представлен упрощенный схематический чертеж известного микроэлектромеханического датчика (кориолисова гироскопа),
на фиг.2 представлен вариант реализации микроэлектромеханического датчика согласно изобретению с одним подвижным электродом,
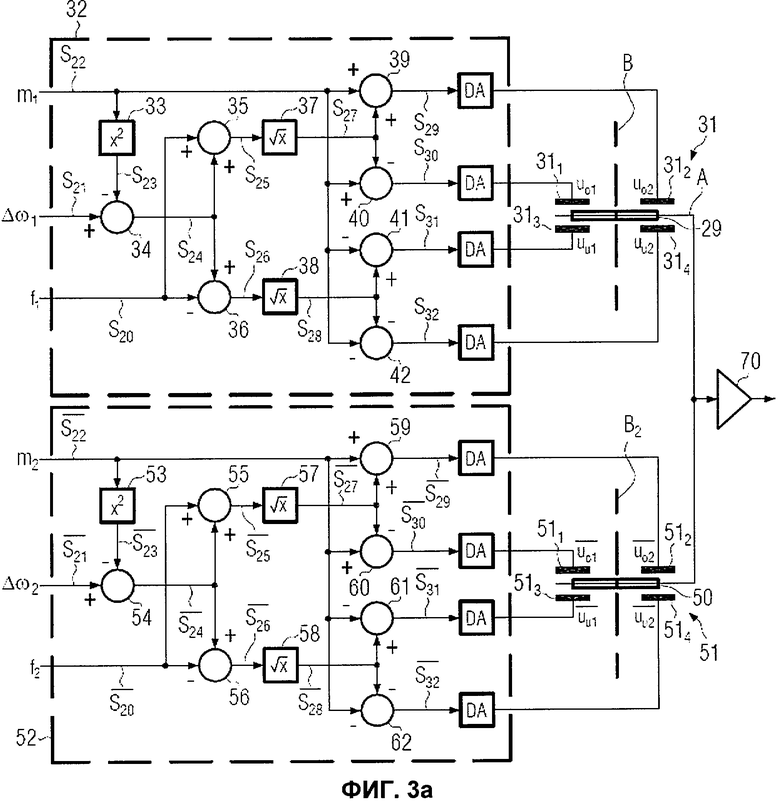
на фиг.3а представлен еще один вариант реализации микроэлектромеханического датчика согласно изобретению с двумя подвижными электродами,
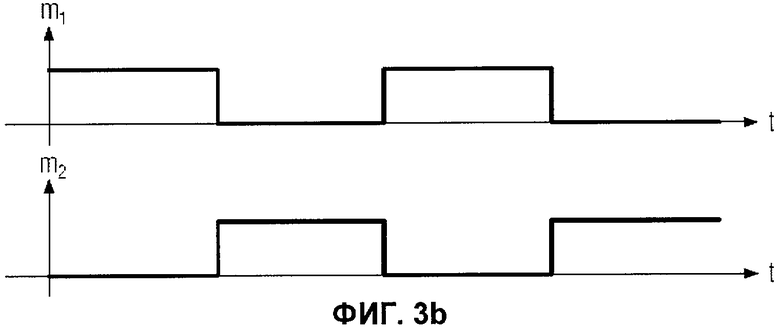
на фиг.3b схематично представлена временная характеристика при использовании двух коэффициентов считывания.
На фиг.2 представлена часть предпочтительного варианта реализации микроэлектромеханического датчика 30 согласно изобретению. Часть, изображенную на фиг.2, можно приближенно сравнить с "набором", содержащим модулятор 7, формирователи 8, 9, резонатор 10 и электродную систему 111-114, показанные на фиг.1.
На фиг.2 представлена электродная система 31, отстоящая на некоторое расстояние от подвижного электрода 29, который может быть, например, частью резонатора (не показан), и содержащая с первого по четвертый электроды 311-314. Первый и третий электроды 311, 313 и второй и четвертый электроды 312, 314 соответственно формируют электродные пары. Электроды электродной пары расположены симметрично по отношению к оси А. Кроме того, электродные пары отделены друг от друга осью В, перпендикулярной оси А, и симметричны по отношению к указанной оси В. Как видно из фиг.2, электрод 29 расположен, например, центросимметрично по отношению к точке пересечения S двух осей А, В симметрии.
Также показан блок 32 формирования электродных сигналов, на который могут поступать сигнал S20 прикладываемой силы, обозначаемый также "f", сигнал S21 жесткости, обозначаемый также "Δω", и сигнал S22 коэффициента усиления при считывании выходного сигнала, обозначаемый также "m". Сигнал S22 возводят в квадрат в блоке 33 возведения в квадрат, а полученный таким образом сигнал S23 подают со знаком минус на первый суммирующий каскад 34, где указанный сигнал суммируют с сигналом S21. Выходной сигнал S24 каскада 34 подают на второй и третий суммирующие каскады 35, 36. В каскаде 35 сигнал S24 суммируют с сигналом S20, а в каскаде 36 сигнал S24 суммируют с сигналом S20 со знаком минус. Выходные сигналы S25, S26 каскадов 35, 36 подают на блоки 37, 38 извлечения корня, которые соответственно извлекают корень из одного из сигналов S25, S26. Выходные сигналы S27, S28 блоков 37, 38 подают на суммирующие каскады 39-42 с четвертого по седьмой, в которых каждый из сигналов S27, S28 суммируют с сигналом S22 и вычитают из него. Соответствующие выходные сигналы S29-S32 подают на цифроаналоговые преобразователи 43-46, которые преобразовывают до сих пор цифровые сигналы в аналоговые сигналы uo1, uo2, uu1, uu2 и подают их на соответствующие электроды 311-314. Сигналы uo1, uo2, uu1 и uu2 представляют собой электродные сигналы в терминах настоящего изобретения, а их зависисмость от сигналов S20 (=f), S21 (=Δw) и S22 (=m) может быть выражена следующим образом:




Соответственно, электродные сигналы uo1, u02 представляют собой электродные сигналы на электродах 311, 312, расположенных выше оси А, а uu1, uu2 представляют собой электродные сигналы электродов 313, 314, расположенных ниже оси А. Вывод электрода 29 подведен к потенциально заземленной точке, а заряд, стекающий с электрода 29, измеряют.
Фиг.3 илюстрирует, как можно сочетать два подвижных, электрически соединенных электрода 29, 50 при осуществлении мультиплексного способа. Управляющие сигналы m1 и m2, переключаемые, как проиллюстрировано на фиг.3b, позволяют усилителю 70 заряда поочередно видеть соответствующие электроды 29, 50. Прикладываемые силы f1 и f2 и сочетания Δω1 и Δω2 могут быть выбраны независимо.
На фиг.3 представлена электродная система 51, содержащая электроды 511-514 с первого по четвертый и отстоящая на некоторое расстояние от второго подвижного электрода 50, электрически связанного по меньшей мере с одним электродом 29. Первый и третий электроды 511, 513 и второй и четвертый электроды 512, 514 соответственно образуют электродные пары. Электроды электродной пары расположены симметрично по отношению к оси А2. Кроме того, электродные пары отделены друг от друга осью D2, перпендикулярной оси А2, и симметричны по отношению к указанной оси D2.
Также показан второй блок 52 выработки электродных сигналов, на который может поступать второй сигнал  прикладываемой силы, обозначаемый также "f2", второй сигнал
прикладываемой силы, обозначаемый также "f2", второй сигнал  жесткости, обозначаемый также "Δω2", и второй сигнал
жесткости, обозначаемый также "Δω2", и второй сигнал  коэффициента усиления при считывании выходного сигнала, обозначаемый также "m2". Второй сигнал
коэффициента усиления при считывании выходного сигнала, обозначаемый также "m2". Второй сигнал  возводят в квадрат во втором блоке 53 возведения в квадрат, а полученный таким образом сигнал
возводят в квадрат во втором блоке 53 возведения в квадрат, а полученный таким образом сигнал  подают со знаком минус на восьмой суммирующий каскад 54, где указанный сигнал суммируют с сигналом
подают со знаком минус на восьмой суммирующий каскад 54, где указанный сигнал суммируют с сигналом  . Выходной сигнал
. Выходной сигнал  каскада 54 подают на девятый и десятый суммирующие каскады 55, 56. В каскаде 55 сигнал суммируют с сигналом , а в каскаде 56 сигнал суммируют с сигналом со знаком минус. Выходные сигналы
каскада 54 подают на девятый и десятый суммирующие каскады 55, 56. В каскаде 55 сигнал суммируют с сигналом , а в каскаде 56 сигнал суммируют с сигналом со знаком минус. Выходные сигналы  ,
,  каскадов 55, 56 подают на вторые блоки 57, 58 извлечения корня, которые соответственно извлекают корень из одного из сигналов
каскадов 55, 56 подают на вторые блоки 57, 58 извлечения корня, которые соответственно извлекают корень из одного из сигналов  ,
,  . Выходные сигналы
. Выходные сигналы  ,
,  блоков 57, 58 подают на суммирующие каскады 59-62 с одиннадцатого по четырнадцатый, в которых каждый из сигналов
блоков 57, 58 подают на суммирующие каскады 59-62 с одиннадцатого по четырнадцатый, в которых каждый из сигналов  ,
,  суммируют с сигналом и вычитают из него. Соответствующие выходные сигналы
суммируют с сигналом и вычитают из него. Соответствующие выходные сигналы  подают на вторые цифроаналоговые преобразователи 63-66, которые преобразуют до сих пор цифровые сигналы в аналоговые сигналы
подают на вторые цифроаналоговые преобразователи 63-66, которые преобразуют до сих пор цифровые сигналы в аналоговые сигналы  ,
,  ,
,  ,
,  и подают их на соответствующие электроды 511-514. Сигналы
и подают их на соответствующие электроды 511-514. Сигналы  ,
,  ,
,  , представляют собой электродные сигналы в терминах настоящего изобретения, а их зависимость от сигналов , и может быть выражена следующим образом:
, представляют собой электродные сигналы в терминах настоящего изобретения, а их зависимость от сигналов , и может быть выражена следующим образом:




Соответственно сигналы , представляют собой сигналы на электродах 511, 512, расположенных выше оси A2, a , представляют собой сигналы на электродах 513, 514, расположенных ниже оси А2.
Другие особенности изобретения представлены в описании ниже.
Предпочтительно, чтобы при применении (емкостных) микроэлектромеханических датчиков для измерения ускорения или скорости вращения могли быть выполнены следующие условия:
1. Заданная, созданная электростатическим способом сила может быть приложена к подвижному электроду (функция датчика крутящего момента).
2. Заданная, созданная электростатическим способом упругая сила может быть приложена к тому же подвижному электроду. Как правило, жесткость отрицательна и делает положительную механическую упругость «мягче» до предварительно определенной степени, чтобы таким образом обеспечить заданную настройку собственного резонанса механического осциллятора.
3. Смещение электрода может быть измерено с помощью коэффициента усиления при считывании выходного сигнала, который может быть установлен (функция датчика для измернения механических перемещений).
4. Для этого при работе должно выполняться одно условие, состоящее в том, что измерительный сигнал не должен содержать каких-либо иных составляющих, кроме зависящих от смещения и коэффициента усиления при считывании выходного сигнала.
Предположим, что имеется конденсатор с подвижным электродом. Электрод может быть перемещен на величину смещения х из точки приведения в движение. Тогда емкость зависит от х: С=С(х). Из принципа энергии следует, что при приложении к конденсатору напряжения U в точке приведения в движение начинает действовать электростатическая сила

Дифференциальный конденсатор представляет собой два конденсатора с общей точкой приведения в действие, где выполняется условие

В этом случае приближенно:

и, следовательно,

Тогда при приложении к конденсаторам напряжений U1 и U2 сила в точке приведения в движение подвижного электрода

Подставляя (11) и (12), получаем:

Следовательно, сила содержит составляющую, которая не зависит от х, и составляющую, которая пропорциональна х и соответствует жесткости. Составляющая, не зависящая от х, пропорциональна  , а жесткость пропорциональна
, а жесткость пропорциональна  .
.
В случае четырех конденсаторов, когда


для силы, соответственно, справедливо:

Следовательно, здесь составляющая, не зависящая от расстояния, пропорциональна

а жесткость пропорциональна

Составляющая, не зависящая от расстояния, применима для случая приложения требуемой силы (возвратная сила, датчик крутящего момента), а жесткость во взаимодействии с упругомассовой системой обеспечивает настройку последней на требуемую резонансную частоту.
Для зарядов справедливо:

Подставляя (15) и (16) и пренебрегая квадратичным членом, получим:


Первое выражение отражает наводки, не зависящие от х и обычно нежелательные, а вторая составляющая пропорциональна х и, следовательно, применима для считывания смещения х.
Принимая во внимание квадратичный член, получаем


т.е. он исчезает вместе с постоянным членом, если наводки равны нулю, другими словами, при Uo1+Uo2+Uu1+Uu2=0.
Условия 1-3 могут быть выполнены независимо друг от друга с помощью датчика и способа применения по настоящему изобретению.
Таким образом, возможно как приложение силы без выработки сигнала считывания, так и, наоборот, отсутствие приложенной силы при коэффициенте усиления при считывании выходного сигнала, отличном от нуля.
В обычных электродных системах можно устанавливать аналогичные системы в соответствии с приведенными соотношениями при соблюдении следующих условий.
Заряды на всех электродах всегда имеют такую величину, что:
1) на входе усилителя заряда в итоге отсутствуют члены, не зависящие от смещения х,
2) на входе усилителя заряда в итоге имеется составляющая, зависящая от смещения х и имеющая коэффициент усиления, который может быть установлен,
3) на подвижный электрод действует сила, которая может быть задана независимо от смещения х,
4) на подвижном электроде создана электростатическая пружина, жесткость которой может быть установлена.
Коэффициент усиления при считывании выходного сигнала, который может быть установлен, можно использовать для получения, например, "понижающего детектора", если, например, коэффициент усиления при считывании выходного сигнала сформирован в виде синусоидальной несущей, имеющей ту же частоту, что и колебания электрода. В этом случае частоту колебаний понижают до 0, что приводит к фазочувствительной демодуляции. Кроме того, с помощью коэффициента считывания, который может быть установлен, функции считывания осцилляторов, подвижные электроды которых электрически связаны, могут быть считаны мультиплексным методом с временным разделением путем процедуры, при которой в данный момент времени коэффициент считывания только одного осциллятора отличен от нуля, и, соответственно, в данный момент времени с помощью усилителя общего заряда регистрируют перемещение только одного осциллятора в хронологическом порядке.
Функция считывания

основанная на измерении емкости, как правило, приводит к тому, что при подключении коэффициента считывания посредством напряжения U возникает не только составляющая, зависящая от смещения Δх, но и значительно большая составляющая, зависящая от неподвижной емкости С0. Способ согласно изобретению подавляет эту нежелательную составляющую, как показано ниже на фиг.2, с помощью условных обозначений.
Согласно уравнению (18) сила, действующая на электрод 29, пропорциональна:

Таким образом, условие 1 выполнено. Согласно уравнению (19) отстройка частоты, вызванная электростатической пружиной, пропорциональна:

Следовательно, условие 2 выполнено. Согласно уравнению (21) коэффициент считывания пропорционален:

Следовательно, условие 3 выполнено. Более того, согласно уравнению (22)

благодаря чему выполнено и условие 4. Для получения корректной функции значения должны удовлетворять условию

Изобретение, таким образом, описывает способ применения микроэлектромеханических датчиков с разделенными электродами. Способ согласно изобретению позволяет в системах, содержащих электрически связанные подвижные электроды, устанавливать возбуждающую силу, резонансную настройку и коэффициент усиления при считывании выходного сигнала отдельно друг от друга. Таким образом, обеспечена возможность процесса считывания в мультиплексном режиме полностью независимо от процессов возбуждения (выработки возбуждающих колебаний) и настройки, например перестраивания от частоты возбуждения к частоте считывания для получения двухрезонансного резонатора.
Изобретение относится к микроэлектромеханическим датчикам, используемым в качестве кориолисовых гироскопов. Датчик (30) содержит по меньшей мере один подвижный электрод (29), электродную систему (311-314), отстоящую на некотором расстоянии от электрода (29) и содержащую электроды, выполненные с возможностью раздельного управления и подачи на них соответствующих электродных сигналов (uo1, uo2, uu1 uu2), которые могут быть использованы для установления и/или изменения электростатическим способом прикладываемой силы, жесткости и коэффициента усиления при считывании выходного сигнала подвижного электрода (29). Блок (32) выработки электродных сигналов, соединенный с электродной системой (311-314), вырабатывает электродные сигналы (uo1, uo2, uu1, uu2) в зависимости от сигнала (f) прикладываемой силы, сигнала (Δω) жесткости и сигнала (m) коэффициента усиления при считывании выходного сигнала и согласовывает электродные сигналы между собой таким образом, чтобы прикладываемая сила, жесткость и коэффициент усиления при считывании выходного сигнала подвижного электрода (29) могли быть установлены и/или изменены до конкретных требуемых значений независимо друг от друга. Изобретение позволяет расширить функциональные возможности датчика. 2 н. и 9 з.п. ф-лы, 3 ил.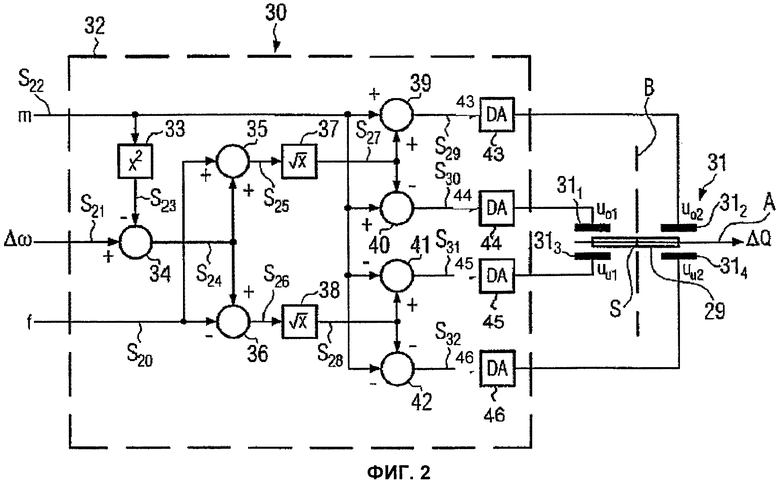
1. Микроэлектромеханический датчик (30), содержащий
по меньшей мере один подвижный электрод (29),
электродную систему (311-314), отстоящую на некоторое расстояние от указанного электрода (29) и содержащую электроды, выполненные с возможностью раздельного управления и подачи на них соответствующих сигналов (uo1, uo2, uu1, uu2), которые могут быть использованы для установления и/или изменения электростатическим способом прикладываемой силы, жесткости и коэффициента усиления при считывании выходного сигнала подвижного электрода,
блок (32) выработки электродных сигналов, соединенный с электродной системой (311-314) и выполненный с возможностью подачи на него сигнала (f) приложенной силы, сигнала (Δω) жесткости и сигнала (m) коэффициента усиления при считывании выходного сигнала, задающих установление и/или изменения прикладываемой силы, жесткости и коэффициента усиления при считывании выходного сигнала подвижного электрода (29), которые необходимо выполнить,
причем указанный блок (32) вырабатывает электродные сигналы (uo1, uo2, uu1, uu2) в зависимости от сигнала прикладываемой силы, сигнала жесткости и сигнала коэффициента усиления при считывании выходного сигнала и согласовывает электродные сигналы (uo1, uo2, uu1, uu2) между собой таким образом, что прикладываемая сила, жесткость и коэффициент усиления при считывании выходного сигнала подвижного электрода могут быть установлены и/или изменены до конкретных требуемых значений независимо друг от друга.
2. Датчик по п.1, отличающийся тем, что он содержит блок переноса зарядов, регистрирующий переносы зарядов на подвижном электроде (29), и оценочный блок, определяющий мгновенное перемещение подвижного электрода (29) на основе зарегистрированного переноса заряда.
3. Датчик по п.2, отличающийся тем, что блок выработки электродного сигнала вырабатывает электродные сигналы (uo1, uo2, uu1, uu2) в зависимости от сигнала (f) прикладываемой силы, сигнала (Δω) жесткости и сигнала (m) коэффициента усиления при считывании выходного сигнала таким образом, что перенос заряда содержит только составляющие, возникающие в результате перемещения подвижного электрода (29) и зависящие от значения коэффициента усиления при считывании выходного сигнала.
4. Датчик по любому из пп.1-3, отличающийся тем, что электродная система (311-314) содержит 4 электрода.
5. Датчик по п.4, отличающийся тем, что четыре электрода (311-314) сгруппированы в две электродные пары (311, 313; 312, 314) и расположены симметрично по отношению к первой оси (В), отделяющей эти электродные пары (311, 313; 312, 314) Друг от друга, и симметрично по отношению ко второй оси (А), отделяющей электроды соответствующих пар (311, 313; 312, 314) друг от друга.
6. Датчик по п.5, отличающийся тем, что подвижный электрод (39) расположен центросимметрично по отношению к точке (S) пересечения двух указанных осей (А, В) симметрии.
7. Датчик по п.5, отличающийся тем, что электродные сигналы (uo1, uo2, uu1, uu2) представлены в виде следующих уравнений:




где Δω - сигнал жесткости; m - сигнал коэффициента усиления при считывании выходного сигнала; f - сигнал прикладываемой силы; uo1, uo2 - электродные сигналы электродов, расположенных выше второй оси; uu1, uu2 - электродные сигналы электродов, расположенных ниже второй оси.
8. Датчик по п.7, отличающийся тем, что для него выполнено следующее условие:
9. Датчик по любому из пп.1, 5-8, отличающийся тем, что подвижный электрод (29) выполнен в виде части резонатора.
10. Датчик по п.9, отличающийся тем, что он содержит
второй подвижный электрод (50), электрически связанный с указанным по меньшей мере одним подвижным электродом (29),
вторую электродную систему (511-514), отстоящую на некоторое расстояние от второго подвижного электрода (50) и содержащую электроды, выполненные с возможностью раздельного управления и подачи на них соответствующих электродных сигналов (, , , ), которые могут быть использованы для установления и/или изменения электростатическим способом прикладываемой силы, жесткости и коэффициента усиления при считывании выходного сигнала второго подвижного электрода (50),
второй блок (52) выработки электродных сигналов, соединенный со второй электродной системой (511-514) и выполненный с возможностью подачи на него второго сигнала (f2) прикладываемой силы, второго сигнала (Δω2) жесткости и второго сигнала (m2) коэффициента усиления при считывании выходного сигнала, задающих установление и/или изменения прикладываемой силы, жесткости и коэффициента усиления при считывании выходного сигнала подвижного электрода, которые необходимо выполнить,
причем указанный блок (52) вырабатывает электродные сигналы (, , , ) в зависимости от второго сигнала (f2) прикладываемой силы, второго сигнала (Δω2) жесткости и второго сигнала (m2) коэффициента усиления при считывании выходного сигнала и согласовывает электродные сигналы (uo1, uo2, uu1, uu2) между собой таким образом, что вторая прикладываемая сила, вторая жесткость и второй коэффициент усиления при считывании выходного сигнала подвижного электрода (50) могут быть установлены и/или изменены до конкретных требуемых значений независимо друг от друга и независимо от прикладываемой силы, жесткости и коэффициента усиления при считывании выходного сигнала указанного по меньшей мере одного подвижного электрода (29).
11. Способ применения микроэлектромеханического датчика (30), содержащего по меньшей мере один подвижный электрод (29) и электродную систему (311-314), отстоящую на некоторое расстояние от указанного электрода (29) и содержащую электроды, выполненные с возможностью раздельного управления и подачи на них соответствующих электродных сигналов (uo1, uo2, uu1, uu2), согласно которому
вырабатывают электродные сигналы (uo1, uo2, uu1, uu2) в зависимости от сигнала (f) прикладываемой силы, сигнала (Δω) жесткости и сигнала (m) коэффициента усиления при считывании выходного сигнала, задающих установление и/или изменения прикладываемой силы, жесткости и коэффициента усиления при считывании выходного сигнала подвижного электрода (29), которые необходимо выполнить,
подают на соответствующие электроды электродные сигналы (uo1, uo2, uu1, uu2) для установления и/или изменения электростатическим способом прикладываемой силы, жесткости и коэффициента усиления при считывании выходного сигнала подвижного электрода (29),
причем электродные сигналы (uo1, uo2, uu1, uu2) вырабатывают в зависимости от сигнала (f) прикладываемой силы, сигнала (Δω) жесткости и сигнала (m) коэффициента усиления при считывании выходного сигнала и согласовывают электродные сигналы между собой таким образом, чтобы прикладываемая сила, жесткость и коэффициент усиления при считывании выходного сигнала подвижного электрода (29) могли быть установлены и/или изменены до конкретных требуемых значений независимо друг от друга.
| US 6250156 B1, 26.06.2001 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| DE 102004056699 A1, 01.06.2006 | |||
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ СИГНАЛОВ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ВИБРАЦИОННОГО ТИПА | 2004 |
|
RU2274833C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2001 |
|
RU2209394C2 |

