Изобретение относится к области устройств морских глубоководных плавучих платформ, применяемых для разработки месторождений и добычи полезных ископаемых, в том числе в районах замерзающих морей, и может быть использовано для создания плавучих искусственных островов в глубоководных акваториях.
Известен «Способ укрепления лопаток цепного движителя», описанный в SU 1841 А1, 15.09.1924, и заключающийся в шарнирном креплении лопаток на звеньях цепи, и на той же цепи между лопатками укреплены на шарнирах упоры, удерживающие лопатки в рабочем положении.
Недостатком его является то, что масса воды не находится в замкнутом пространстве и перемещение цепного движителя происходит за счет отталкивания от воды лопатками, что является неэффективным.
В качестве прототипа выбрана «Плавучая буровая платформа», описанная в SU 1646945 А1, 07.05.1991, состоящая из прямоугольного понтона, на котором установлены стабилизирующие колонны с верхним корпусом и движителями, имеющими возможность разворачиваться в необходимом направлении и установленными под колоннами.
Недостатком ее является то, что при движении платформы через лед движительный комплекс не защищен от воздействия льда, так как находится в зоне расположения льда.
Целью изобретения является повышение маневренности платформы, надежности и мощности движителя и возможности автономного перемещения в среде дрейфующего морского льда.
Указанная цель достигается тем, что на площадке платформы установлен источник энергии и механизмы передачи энергии, а к опорной колонне с возможностью перемещения по колонне, поворота вокруг нее и вертикального качания прикрепляют движитель, выполненный в виде цепной передачи, на звеньях которой закреплены подвижные оболочка и перегородки, причем движитель закрыт в корпусе, а перемена направления движения осуществляется за счет поворота перегородок в нижней или верхней части цепи. Разрушение льда перед колонной производится качающимися резцами, установленными на раме, шарнирно прикрепленной к втулке, которая передвигается по колонне. Качание резцов производится при помощи одной или нескольких воздушных емкостей с переменным объемом полостей.
На фиг.1 изображена схема морской глубоководной плавучей платформы.
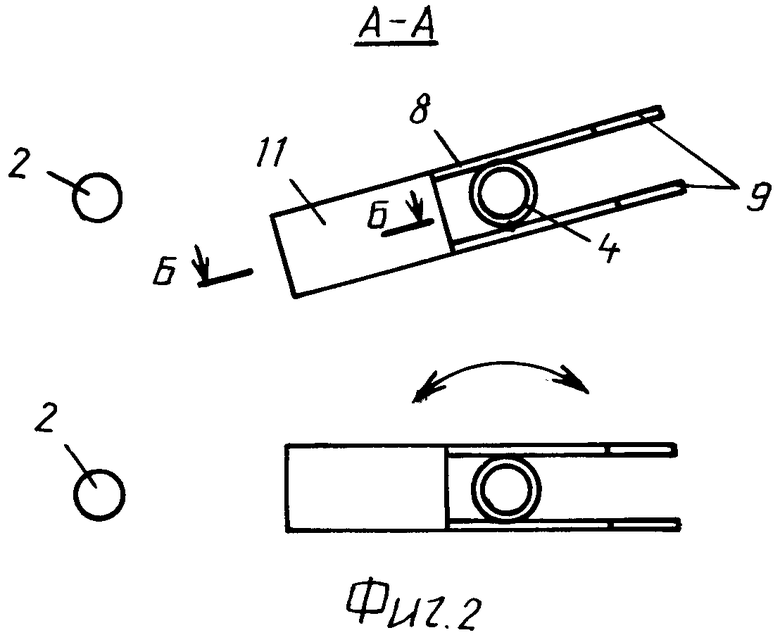
На фиг.2 - сечение А-А на фиг.1, изображена схема крепления движителя и резцов к колонне.
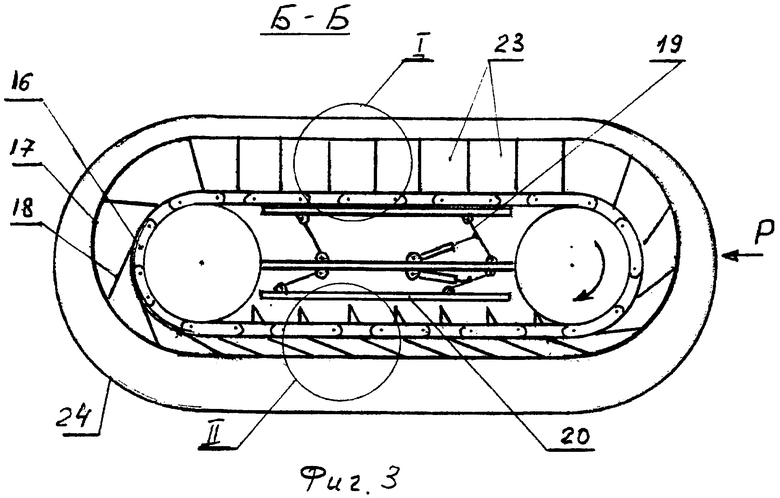
На фиг.3 - сечение Б-Б на фиг.2, изображено устройство движителя, вариант 1 с продольными балками.
На фиг.4 - сечение Б-Б на фиг.2, изображено устройство движителя, вариант 2 с подвижной рамкой.
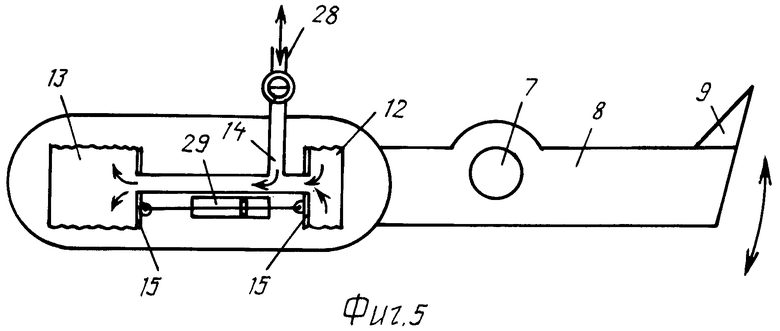
На фиг.5 изображена схема установки на качающейся раме механизма качения, вариант с поршнями и с возможностью выпуска или забора воздуха из атмосферы.
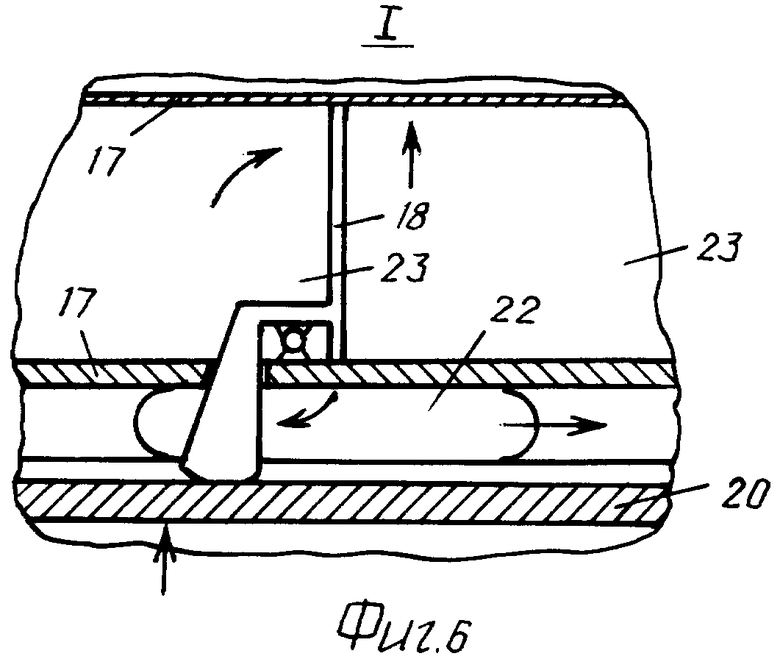
На фиг.6 - сечение I на фиг.3, изображена схема взаиморасположения подвижной перегородки и опорной балки на рабочей части цепи.
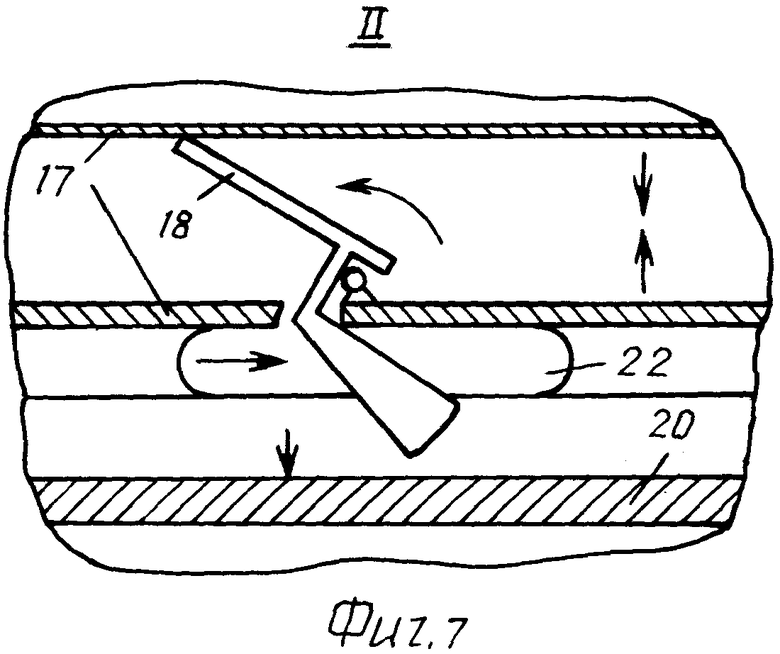
На фиг.7 - сечение II на фиг.3, изображена схема взаиморасположения подвижной перегородки и опорной балки на холостой части цепи.
Морская глубоководная плавучая платформа состоит из площадки 1, на которой установлен источник энергии 25 и механизм ее передачи 26, 27 и 28, которая при помощи опорных колонн 2 соединена с понтоном 3. На опорных колоннах 2 установлена втулка 4, имеющая привод поворота 5 и привод подъема-опускания 6 (в виде гидроцилиндра). На втулке 4 имеется шарнир 7, на котором закреплена качающаяся рама 8, на одном конце которой закреплены резцы 9, разрезающие лед 10, а на другом конце установлен движитель платформы 11. Качание рамы 8 производится за счет двух емкостей 12 и 13, имеющих возможность расширения и заполненных воздухом. По первому варианту, соединенных между собой и при помощи механизма привода 29 (например, гидроцилиндра) путем поочередного сжатия поршнями одной из емкостей 12 или 13 происходит следующее: сила веса качающейся рамы 8 и оборудования, размещенного на ней, поворачивает раму 8 вокруг шарнира 7 и она поднимает резцы 9 вверх, для опускания резцов 9 вниз воздух из емкости 12 перемещается в емкость 13, при этом объем емкости 12 уменьшается, а объем емкости 13 увеличивается, создавая подъемную силу, противодействующую силе веса качающейся рамы 8. По второму варианту из источника энергии 25 (например, воздушный компрессор) через механизм передачи энергии 28 (например, воздухопроводы с управляющей системой, клапаны, краны, задвижки) накачивается воздух, например, в расширяющуюся емкость 13, которая создает подъемную силу и, поворачивая рычаг 8, опускает резцы 9 вниз.
Движитель платформы 11 представляет собой цепь 16, на которой прикреплена гибкая оболочка 17 (выполненная, например, в виде камеры колеса, только одета она на цепь), внутри которой установлены подвижные перегородки 18 и привод 19 их поворота (выполненный, например, в виде гидроцилиндра). Привод поворота 19 по первому варианту исполнения поочередно прижимает к верхней или нижней части цепи 16 соответственно верхнюю или нижнюю продольную балку 20. По второму варианту привод поворота 19 прикреплен к подвижной рамке 21, которая поочередно прижимается к верхней или к нижней части цепи 16.
На цепи 16, к которой прикреплена гибкая оболочка 17 трубообразной формы, внутри этой оболочки 17 находятся перегородки 18, которые шарнирно крепятся к звеньям 22 цепи 16. Один клинообразный конец перегородки 18 выходит за оболочку 17 и может поджиматься продольной балкой 20 или подвижной рамкой 21, при этом перегородка 18, поворачиваясь вокруг оси шарнира, прикрепленного к звену 22, раздвигает стенки гибкой оболочки 17. Образовавшееся пространство заполняется водой 23 через отверстия в части оболочки 17, прикрепленной к звеньям 22 цепи 16. При полном повороте перегородок 18 эти отверстия перекрываются клинообразным концом перегородок 18. Таким образом, в пространстве, образованном между стенками гибкой оболочки 17 и перегородками 18, заключена масса воды 23. В другой части цепи 16 балка 22 или подвижная рамка 21 отодвинута от звеньев 22 и перегородка 18 поворачивается вокруг оси шарнира, при этом клинообразный конец перегородки 18 открывает отверстия в стенке оболочки 17, которая прикреплена к цепи, и вода 23, сообщаясь с водной средой, уходит из оболочки 17. Таким образом, в этой части цепи 16 объем воды 23 значительно меньше, и кроме этого она может свободно вытекать из пространства, образованного между стенками гибкой оболочки 17 и перегородок 18, не создавая сопротивления для движения в этой части цепи 16.
Движитель 11 заключен в корпус 24, что предотвращает попадание морского мусора в движущиеся части механизмов и исключает их поломки. На площадке 1 также установлен источник энергии 25 и механизм передачи энергии 26, 27 и 28.
Устройство работает следующим образом.
Для передвижения платформы 1 раму 8 с закрепленным на ней движителем 11 и резцами 9 за счет источника энергии 25 и механизма передачи энергии 26 при помощи привода подъема-опускания 6 (например - гидроцилиндра), двигая по опорной колонне 2, заглубляют в воду. Затем при помощи механизма передачи энергии 27 и связанного с ним привода поворота 5 (выполненного например, в виде 2 зубчатых колес) раму 8 устанавливают вдоль направления движения платформы 1. В движителе 11 при помощи источника энергии 25 (например, воздушного компрессора, гидравлической насосной станции, электрического генератора) и механизма передачи энергии (например, гидравлического мотора) приводят во вращение цепь 16 вместе с гибкой оболочкой 17 и перегородками 18. Движение платформы 1 вперед или назад вдоль выбранного направления движения производится при помощи подвижных балок 20 или рамки 21, которые приводом 19 прижимают к одной из боковых частей цепи 16. При прижатии балок 20 к цепи 16 перегородки 18, шарнирно прикрепленные к звеньям 22 и скользящие по балке 20, поворачиваются поперек движения цепи 16, при этом вода 23 заполняет пространство между гибкой оболочкой 17 и перегородками 18. Цепь 16 передвигает массу неподвижной воды, заключенной в пространство между стенками гибкой оболочки 17 и перегородками 18, и передает усилие на опорную колонну 2, в результате чего платформа 1 движется вперед. Для движения назад балку 20 или рамку 21 прижимают к другой боковой части цепи 16, при этом открываются перегородки 18 на этой боковой части цепи 16, а направление усилия на опорную колонну 2 меняется на противоположное. Таким образом, при постоянном направлении вращения цепи 16 можно менять направление движения платформы 1, что упрощает устройство механизма привода движителя 11, т.к. не нужен механизм изменения направления вращения цепи 16.
Для маневрирования на месте рамы 8 на опорных колоннах 2 разворачивают в разные стороны и включают движители 11 либо у движителей 11 открывают перегородки 18 на разных боковых частях цепи 16, при этом на опорные колонны 2 действуют разные по направлению усилия и платформа 1 может вращаться на одном месте.
Для преодоления ледяных полей путем резания льда 10, при помощи приводов 5 и 6 подводят резцы 9 под нижнюю кромку льда 10 и его подрезают снизу, при этом резцы 9, находясь под водой, не покрываются льдом, что улучшает условия работы. При необходимости лед 10 разрушают путем скалывания, для этого резцам 9 сообщают колебательные движения при помощи емкости 13, наиболее удаленной от шарнира 7. Периодически увеличивая или уменьшая при помощи поршней 15 объем воздуха в емкостях 13 и 12, создают усилие скалывания льда 10 резцами 9, для этого воздух из емкости 13 по воздухопроводу 14 желательно подавать в другую емкость 12, находящуюся под водой, что может исключить намораживание льда в емкостях 12 и 13 при повышенной влажности воздуха, или по воздухопроводу 14 выпускать в атмосферу. Через лед 10 проходят только опорные колонны 2, соединенные с понтоном 3 и поддерживающие платформу 1, что повышает надежность работы устройства и снижает затраты энергии на преодоление ледяных полей.
Для ремонта движителя 11 или резцов 9 втулку 4 при помощи привода подъема-опускания 6 по опорной колонне 2 поднимают к платформе 1 и, вращая приводом поворота 5, устанавливают раму 8 в наиболее удобное положение для ремонта механизмов.
Для предохранения движителя 11 от попадания в него морского мусора (обрывки сетей, тросов и прочее) его помещают в корпус 24, герметичный или с отверстиями.
Предлагаемое изобретение позволит с минимальными затратами энергии надежно удерживать платформу в заданном районе моря и с заданной ориентацией. В настоящее время устройство находится на стадии проектирования.

Морская глубоководная плавучая платформа относится к области устройств плавучих искусственных островов в глубоководных акваториях, применяемых для поиска месторождений и добычи полезных ископаемых, в том числе в районах замерзающих морей. Обеспечивает повышение маневренности и надежности платформы с минимальными потерями энергии на передвижение и возможности автономного перемещения в среде дрейфующего морского льда, а также позволяет с минимальными затратами энергии надежно удерживать платформу в заданном районе моря и с заданной ориентацией. Платформа содержит площадку, опирающуюся колоннами на понтоны. К опорной колонне с возможностью перемещения по колонне, поворота вокруг нее и вертикального качания прикреплен закрытый в корпусе движитель, выполненный в виде цепной передачи, на звеньях которой закреплены подвижные оболочка и перегородки. Перемена направления движения осуществляется за счет поворота движителей или смены рабочего хода на холостой в боковых частях цепи. Ледовые поля, движущиеся на платформу, перед колоннами разрушаются снизу резанием или скалыванием резцом, находящимся под водой. Для создания усилия скалывания под водой установлены воздушные емкости переменного объема, связанные с резцом. 4 з.п. ф-лы, 7 ил.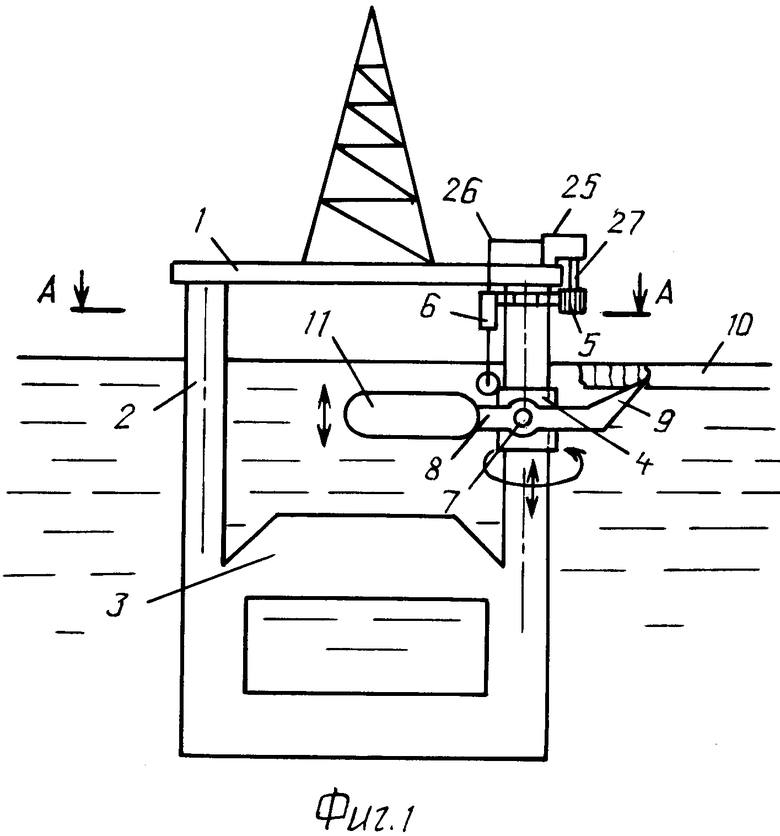
1. Морская глубоководная плавучая платформа, содержащая площадку, опирающуюся колоннами на емкости, отличающаяся тем, что, с целью автономного перемещения и маневрирования к опорной колонне с возможностью перемещения по колонне, поворота вокруг нее и вертикального качания, к ней прикреплен движитель, выполненный в виде цепной передачи, на звеньях которой закреплены подвижные оболочка и перегородки.
2. Морская глубоководная плавучая платформа по п.1, отличающаяся тем, что движитель закрыт в корпусе.
3. Морская глубоководная плавучая платформа по п.1, отличающаяся тем, что для перемены направления движения к колонне прикреплен механизм поворота движителя, а на движителе установлен механизм смены рабочего хода на холостой, располагающийся в нижней и верхней части цепи.
4. Морская глубоководная плавучая платформа по п.1, отличающаяся тем, что для разрушения льда резанием или скалыванием резец установлен снизу подо льдом.
5. Морская глубоководная плавучая платформа по п.4, отличающаяся тем, что для создания усилия скалывания под водой установлены воздушные емкости переменного объема, связанные с резцом.
| Плавучая буровая платформа | 1988 |
|
SU1646945A1 |
| Способ укрепления лопаток цепного движителя | 1922 |
|
SU1841A1 |
| Способ разрушения дрейфующих льдов | 1984 |
|
SU1217718A1 |
| Полупогружная буровая установка | 1989 |
|
SU1761585A1 |
| Морская ледостойкая платформа | 1989 |
|
SU1770522A1 |
| СПОСОБ ПОЛУЧЕНИЯ ХОЛОДА | 1993 |
|
RU2085814C1 |

