Область техники, к которой относится изобретение
Настоящее изобретение относится к гибридным приводам, например, для автомобилей, пассажирских транспортных средств, автобусов, грузовых автомобилей, судов и стационарного применения. Кроме того, изобретение также относится к способам управления такими приводами, например, применительно к запуску двигателя внутреннего сгорания и переключению передач. Помимо этого, настоящее изобретение также относится к транспортным средствам, судам и т.п., имеющим такие приводы. Настоящее изобретение также относится к программному обеспечению, выполняемому компьютерным аппаратным обеспечением для реализации способов управления такими приводами.
Предпосылки создания изобретения
В последние годы ведется множество исследований в области технологии гибридных систем с целью сокращения расхода топлива, а также усовершенствования тяговых характеристик. Гибридные системы имеют гибридные приводы, при этом каждый привод обычно содержит двигатель внутреннего сгорания, электрическую машину, элемент для аккумулирования энергии, блок управления приводом и коробку передач для обеспечения связи по меньшей мере электрического генератора с нагрузкой системы. Электрическая машина необязательно реализована в виде электродвигателя/генератора. На первый взгляд могло бы показаться, что такие гибридные приводы являются более сложными и потенциально больше весят, что отрицательно сказалось бы на показателях работы системы. Тем не менее, практическое применение гибридных приводов обеспечивает ряд преимуществ над обычными системами с простыми двигателями внутреннего сгорания, которые работают субоптимально, в особенности, в при частых остановках и трогании с места в условиях городского ездового цикла.
В современных гибридных приводах дополнительное сокращение расхода энергии может быть обеспечено за счет эксплуатации двигателя внутреннего сгорания в наиболее термически эффективном режиме и периодической остановки и запуска двигателя внутреннего сгорания. Когда двигатель внутреннего сгорания не работает, тяговую мощность обеспечивает один или несколько электродвигателей, посредством электронных цепей управления связанных с аккумуляторной батареей. Когда двигатель внутреннего сгорания работает, он может перезаряжать аккумуляторную батарею и(или) обеспечивать тяговую мощность. Кроме того, в некоторых конструкциях гибридного привода один или несколько электродвигателей могут быть настроены на работу в качестве генераторов для обеспечения рекуперативного торможения, когда при торможении происходит преобразование кинетической энергии для перезарядки аккумуляторных батарей.
На практике сталкиваются с техническим затруднением, которое состоит в том, что водители современных транспортных средств, оснащенных более простыми двигателями внутреннего сгорания, привыкли к улучшенным характеристикам, когда транспортное средство работает бесшумно без сколько-нибудь ощутимой вибрации, создаваемой двигателем. В отличие от этого в гибридных транспортных средствах, которые сконструированы таким образом, что их двигатели внутреннего сгорания периодически приводятся в действие и выключаются, могут возникать дополнительная вибрация и резкие изменения доступного тягового момента, что воспринимается водителями как дезориентирующий и потенциально опасный фактор при попытке совершения основных маневров, например обгона другого транспортного средства.
Это техническое затруднение было принято во внимание ранее, и попытка его разрешения предпринята в гибридном приводе, описанном в патенте US 4533011. В общих словах, в нем описан привод, который проиллюстрирован на фиг.1. Привод в целом обозначен позицией 10 и содержит двигатель 20 внутреннего сгорания, имеющий выхлопной патрубок 30. Двигатель 20 внутреннего сгорания связан с устройством 40 регулирования подачи топлива, в которое поступает топливо из топливного бака 50. Выходной коленчатый вал двигателя 20 внутреннего сгорания посредством первого выключающего сцепления 60 связан с электрической машиной 70, способной действовать и как электродвигатель, и как электрический генератор. Электрическая машина 70 посредством второго выключающего сцепления 80 дополнительно связана с входом зубчатой передачи 90; передача 90 способна служить ступенчатой передачей, передаточное отношение которой регулируют посредством блока управления 100 переключением передач. Выход передачи 90 посредством дифференциальной передачи 110 соединен с колесами 120 транспортного средства, которое оснащено приводом 10.
Показанный на фиг.1 привод 10 дополнительно имеет аккумуляторную батарею 200, которая посредством электронного блока 210 управления связана с электрической машиной 70; электронный блок 210 управления способен регулировать электрическую мощность, подаваемую в электрическую машину 70 для генерации в ней крутящего момента, и регулировать электрическую энергию, генерируемую в электрической машине 70, которая связана с аккумуляторной батареей 200 для перезарядки батареи 200. Привод 10 дополнительно имеет блок 220 управления двигателем, который с возможностью взаимодействия с выключающими сцеплениями 60, 80 связана с электронным блоком 210 управления и с устройством 40 регулирования подачи топлива.
Далее в общих чертах описана работа привода 10. Электрическая машина 70 рассчитана на работу в качестве махового колеса двигателя 20 внутреннего сгорания, за счет чего уменьшается вес двигателя 20 внутреннего сгорания и связанная с ним инерция вращения, когда он разъединен с электрической машиной 70 первым сцеплением 60. Когда второе сцепление 80 выключено, а первое сцепление 60 включено, электрическая машина 70 способна проворачивать коленчатый вал двигателя 20 внутреннего сгорания и запускать двигатель 20 внутреннего сгорания, подавая в него топливо посредством устройства 40 регулирования подачи топлива. Когда двигатель 20 внутреннего сгорания приведен в действие и готов к работе, включается второе сцепление 80 для подачи посредством передачи 90 тяговой мощности, которую генерирует двигатель 20 внутреннего сгорания и необязательно электрическая машина 70, на одно или несколько колес 120 для приведения в движение привода 10 и соответствующего транспортного средства. Когда впоследствии необходимо выключить двигатель 20 внутреннего сгорания, первое сцепление 60 выключается, после чего устройство 40 регулирования подачи топлива прерывает подачу топлива в двигатель 20. За счет того, что двигатель 20 внутреннего сгорания изолирован при выключенном первом сцеплении 60, водитель транспортного средства, на котором установлен привод 10, ощущает минимальную вибрацию и преимущественно не ощущает внезапных изменений доступного крутящего момента.
При трогании с места первое сцепление 60 преимущественно выключено, и для генерации достаточного начального пускового крутящего момента используется электрическая машина 70, за счет чего обеспечивается плавное и быстрое ускорение транспортного средства. Когда транспортное средство достигает пороговой скорости, включается первое сцепление 60, чтобы крутящий момент, создаваемый двигателем 20 внутреннего сгорания, можно было использовать в дополнение к крутящему моменту, создаваемому электрической машиной 70. Когда двигатель 20 внутреннего сгорания выключен, крутящий момент для приведения в движение транспортное средство обеспечивает только электрическая машина 70.
Хотя проиллюстрированный на фиг.1 привод 10 в процессе работы обеспечивает множество технических преимуществ, вместе с тем, он имеет сложную конфигурацию с двумя сцеплениями 60, 80. Кроме того, даже хотя в качестве махового колеса в двигателе 20 внутреннего сгорания используется электрическая машина 70, двигатель 20 внутреннего сгорания, который продолжает вращаться после отсоединения от электрической машины 70, потенциально имеет тенденцию к неустойчивой работе прежде, чем он остановится после прекращения подачи в него топлива.
Таким образом, привод 10 не является приводом с оптимальной конфигурацией и подлежит дополнительному усовершенствованию с целью упрощения ее реализации и дополнительного ослабления вибрации и увеличения плавности характеристик генерации крутящего момента.
В публикации патента US 5755302 описан привод гибридного транспортного средства. Привод содержит двигатель внутреннего сгорания и коробку передач. Кроме того, привод имеет вращающийся коленчатый вал, механически соединяемый с двигателем внутреннего сгорания, и вращающийся трансмиссионный вал, механически соединяемый с коробкой передач. К тому же, привод дополнительно имеет подвижный кольцевой ротор, кольцеобразно расположенный вокруг трансмиссионного вала, при этом ротор имеет постоянный магнит для генерации магнитного поля и устройство крепления ротора к трансмиссионному валу таким образом, чтобы в процессе работы происходила передача крутящего момента от ротора трансмиссионному валу. По меньшей мере к двигателю внутреннего сгорания и(или) коробке передач прикреплен стационарный кольцевой статор, концентрически расположенный вокруг и вблизи ротора с возможностью электромагнитного взаимодействия. Статор имеет проводящую обмотку для электромагнитного взаимодействия с магнитным полем ротора. Кроме того, привод имеет только одно сцепление, по меньшей мере частично расположенное внутри углубления статора, при этом сцепление имеет два соединительных механизма для избирательного и фрикционного сцепления коленчатого вала с трансмиссионным валом для передачи крутящего момента между ними, чтобы сцепление можно было переключать между: (а) включенным положением, в котором происходит передача крутящего момента от коленчатого вала трансмиссионному валу; и (б) выключенным положением, в котором прерывается передача крутящего момента от коленчатого вала трансмиссионному валу.
Электронный блок управления приводом способен своевременно варьировать электрическую нагрузку или крутящий момент, генерируемый электрической машиной, содержащей упомянутые ротор и статор, таким образом, чтобы ослаблять колебания крутящего момента на трансмиссионном валу посредством гашения крутильных колебаний. При этом может быть достаточно плавно достигнуто сцепление силами трения, за счет чего при включении сцепления отсутствуют сотрясения, и происходит минимальный износ. Для перехода на повышающую передачу электрическая машина осуществляет электрическое торможение, а для перехода на понижающую передачу - электрическое ускорение. Тем не менее, такая синхронизация переключения передач требует времени в процессе работы.
Краткое изложение сущности изобретения
В основу настоящего изобретения положена задача создания усовершенствованного гибридного привода.
Настоящее изобретение охарактеризовано признаками соответствующих независимых пунктов, в которых заявлены привод и способ управления гибридным приводом. В зависимых пунктах заявлены предпочтительные усовершенствования и дополнительные варианты осуществления гибридного привода, а также способа управления гибридным приводом согласно изобретению.
Согласно первой особенности изобретения предложен гибридный привод, содержащий: двигатель внутреннего сгорания; узел электрической машины (электрическую машину); коробку передач для приема тяговой мощности по меньшей мере от двигателя внутреннего сгорания и(или) электрической машины для подачи соответствующей тяговой мощности на нагрузку; блок управления, связанный с двигателем внутреннего сгорания, электрической машиной и коробкой передач для управления их работой; при этом привод выполнен с возможностью настройки в процессе работы так, чтобы двигатель внутреннего сгорания мог переключаться между нерабочим состоянием и рабочим состоянием, а для переключения двигателя внутреннего сгорания из нерабочего состояния в рабочее состояние его необходимо запустить, отличающийся тем, что блок управления имеет множество входов для приема сигналов обратной связи, поступающих от привода, и сигналов управления, передаваемых приводу, и множество выходов для вывода выходных сигналов для управления работой привода; и блок управления дополнительно содержит компьютерное аппаратное обеспечение, способное осуществлять имитацию (моделирование) крутящего момента привода, которую используют в процессе работы для обработки информации, поступающей на множество входов, с целью вычисления компенсации, блок управления способен осуществлять компенсацию на множестве выходов для ослабления амплитуды рывков крутящего момента, происходящих в процессе работы привода, когда двигатель переключают между рабочим и нерабочим состояниями.
Преимущество изобретения состоит в том, что привод способен обеспечивать улучшенные характеристики в отношении ослабления внезапных колебаний крутящего момента, а именно "рывков", а также простоты и удобства эксплуатации.
В процессе работы гибридного привода блок управления предпочтительно регулирует передачу двигателю внутреннего сгорания крутящего момента, необходимого для проворачивания коленчатого вала при запуске двигателя, таким образом, чтобы она по существу совпадала во времени с переключением передач в коробке передач.
При нахождении коробки передач в нейтральном положении привод предпочтительно позволяет запустить двигатель внутреннего сгорания путем замедления электрической машины преимущественно до остановки, по меньшей мере частичного вращательного соединения двигателя внутреннего сгорания с электрической машиной посредством вращательного соединительного механизма, возбуждения электрической машины с целью сообщения ей ускорения вращательного движения и тем самым разгона двигателя внутреннего сгорания до пороговой скорости вращения, и затем подачи топлива в двигатель внутреннего сгорания для перевода двигателя внутреннего сгорания в рабочее состояние. За счет такого подхода можно уменьшить износ соединительного механизма, а также потенциально увеличить энергосбережение в том, что касается рекуперации энергии для перезарядки элемента для аккумулирования энергии до начала запуска двигателя внутреннего сгорания.
При нахождении коробки передач в нейтральном положении привод при желании позволяет запустить двигатель внутреннего сгорания путем поддержания вращательного состояния электрической машины, по меньшей мере частичного соединения двигателя внутреннего сгорания с электрической машиной посредством вращательного соединительного механизма для передачи крутящего момента от электрической машины двигателю внутреннего сгорания и тем самым разгона двигателя внутреннего сгорания до пороговой скорости вращения и затем подачи топлива в двигатель внутреннего сгорания для перевода двигателя внутреннего сгорания в рабочее состояние. Такой подход является потенциально более быстродействующим, чем замедление электродвигателя преимущественно до остановки, но способен приводить к большему износу вращательного соединительного механизма.
Вращательным соединительным механизмом привода предпочтительно является предохранительная фрикционная муфта, способная обеспечивать передачу постоянного крутящего момента по меньшей мере на протяжении части своего диапазона пробуксовки. Такой постоянный крутящий момент эффективен для фильтрации внезапных колебаний крутящего момента, а именно "рывков".
Электрическая машина привода предпочтительно связана с двигателем внутреннего сгорания путем последовательного расположения сцепления и муфты для передачи крутящего момента с ограничением по вращению.
Вращательный соединительный механизм привода предпочтительно имеет сцепление, установленное между двигателем внутреннего сгорания и электрической машиной. Как показывает практика, такая конфигурация является компактной, простой и прочной.
Один или несколько вращающихся валов двигателя внутреннего сгорания и электрической машины привода предпочтительно снабжены одним или несколькими связанными с блоком управления датчиками, которые определяют показатель крутящего момента, передаваемого двигателю внутреннего сгорания при его запуске и приведении в действие, при этом блок управления обрабатывает такой показатель крутящего момента для управления электрической машиной таким образом, чтобы по меньшей мере частично компенсировать любые резкие изменения крутящего момента, происходящие в приводе. Применение показателя крутящего момента позволяет устройству управления более точно управлять приводом и предотвращать возникновение "рывков" в ней при приведении в действие двигателя внутреннего сгорания.
Один или несколько датчиков привода предпочтительно реализованы в виде датчиков скорости вращения для измерения скорости вращения соответствующего одного или нескольких валов, при этом устройство управления вычисляет показатель крутящего момента на основании инерционных моментов составных частей привода и на основании углового ускорения, вычисляемого во времени на основании одной или нескольких измеренных скоростей вращения.
Согласно второй особенности изобретения предложен гибридный привод, содержащий: двигатель внутреннего сгорания; электрическую машину; коробку передач для приема тяговой мощности по меньшей мере от двигателя внутреннего сгорания и(или) электрической машины для подачи тяговой мощности на нагрузку; блок управления, связанный с возможностью взаимодействия с двигателем внутреннего сгорания, электрической машиной и коробкой передач для управления их работой; при этом привод выполнен с возможностью настройки в процессе работы так, чтобы двигатель внутреннего сгорания мог переключаться между нерабочим состоянием и рабочим состоянием, а для переключения двигателя внутреннего сгорания из нерабочего состояния в рабочее состояние его необходимо запустить, отличающийся тем, что в процессе работы гибридного привода регулируют передачу двигателю внутреннего сгорания крутящего момента, необходимого для проворачивания коленчатого вала при запуске двигателя, таким образом, чтобы она по существу совпадала во времени с включением коробки передач для подачи тяговой мощности на нагрузку привода; и один или несколько вращающихся валов двигателя внутреннего сгорания и электрической машины снабжены одним или несколькими датчиками для определения показателя крутящего момента, передаваемого двигателю внутреннего сгорания при его запуске и приведении в действие, при этом такой показатель крутящего момента обрабатывают с использованием имитации крутящего момента привода, выполняемой в процессе работы компьютерным аппаратным обеспечением блока управления для управления электрической машиной таким образом, чтобы по меньшей мере частично компенсировать любые резкие изменения крутящего момента, происходящие в приводе.
Преимуществом привода с такой конфигурацией является то, что тяговую мощность для приведения в движение транспортного средства поддерживают одновременно с приведением в действие двигателя внутреннего сгорания транспортного средства.
При нахождении коробки передач во включенном положении привод при желании позволяет запустить двигатель внутреннего сгорания путем поддержания состояния вращения электрической машины, по меньшей мере частичного соединения двигателя внутреннего сгорания с электрической машиной посредством вращательного соединительного механизма для передачи крутящего момента от электрической машины двигателю внутреннего сгорания и тем самым разгона двигателя внутреннего сгорания до пороговой скорости вращения и затем подачи топлива в двигатель внутреннего сгорания для перевода двигателя внутреннего сгорания в рабочее состояние.
Один или несколько датчиков привода могут быть реализованы в виде датчиков скорости вращения для измерения скорости вращения соответствующего одного или нескольких валов, при этом устройство управления вычисляет показатель крутящего момента на основании инерционных моментов составных частей привода и на основании углового ускорения, вычисляемого во времени на основании одной или нескольких измеренных скоростей вращения.
Согласно третьей особенности настоящего изобретения предложен способ управления гибридным приводом, содержащим двигатель внутреннего сгорания; электрическую машину; коробку передач для приема тяговой мощности по меньшей мере от двигателя внутреннего сгорания и(или) электрической машины для подачи тяговой мощности на нагрузку; блок управления, связанный с возможностью взаимодействия с двигателем внутреннего сгорания, электрической машиной и коробкой передач для управления их работой; при этом привод выполнен с возможностью настройки в процессе работы так, чтобы двигатель внутреннего сгорания мог переключаться между нерабочим состоянием и рабочим состоянием, а для переключения двигателя внутреннего сгорания из нерабочего состояния в рабочее состояние его необходимо запустить, отличающийся тем, что он включает шаги, на которых:
принимают сигналы обратной связи, поступающие от привода, и сигналы управления на множестве входов блока управления и подают выходные сигналы на множество выходов блока управления для управления работой привода и
используют в блоке управления имитацию крутящего момента привода, выполняемую компьютерным аппаратным обеспечением блока управления, при этом имитацию используют в процессе работы для обработки информации, поступающей на множество входов, с целью вычисления компенсации, блок управления способен осуществлять компенсацию на множестве выходов для ослабления амплитуды рывков крутящего момента, происходящих в процессе работы привода, когда двигатель переключают между рабочим и нерабочим состояниями.
Способ может дополнительно включать шаги, на которых:
а) инициируют переключение передач путем уменьшения крутящего момента, передаваемого коробке передач, и затем переключения коробки передач в нейтральное положение,
б) регулируют передачу двигателю внутреннего сгорания крутящего момента, необходимого для запуска (проворачивания коленчатого вала) двигателя, таким образом, чтобы она по существу совпадала во времени с нахождением коробки передач в нейтральном положении, при этом крутящий момент, необходимый для проворачивания коленчатого вала при запуске двигателя, и подача топлива в двигатель внутреннего сгорания способны привести двигатель внутреннего сгорания в действие, и
в) вводят коробку передач в зацепление и затем увеличивают крутящий момент, передаваемый коробке передач.
Способ также может включать дополнительные шаги, на которых:
г) при нахождении коробки передач в нейтральном положении запускают двигатель внутреннего сгорания путем замедления электрической машины преимущественно до остановки,
д) по меньшей мере частично соединяют двигатель внутреннего сгорания с электрической машиной посредством вращательного соединительного механизма,
е) осуществляют возбуждение электрической машины с целью ускорения вращения электрической машины и тем самым разгона двигателя внутреннего сгорания до пороговой скорости вращения и
ж) осуществляют подачу топлива в двигатель внутреннего сгорания для его перевода в рабочее состояние.
Способ также может включать дополнительные шаги, на которых:
з) при нахождении коробки передач в нейтральном положении двигатель внутреннего сгорания запускают путем поддержания вращательного состояния электрической машины,
и) по меньшей мере частично соединяют двигатель внутреннего сгорания с электрической машиной посредством вращательного соединительного механизма для передачи крутящего момента от электрической машины двигателю внутреннего сгорания и тем самым разгона двигателя внутреннего сгорания до пороговой скорости вращения и
к) подают топливо в двигатель внутреннего сгорания для перевода двигателя внутреннего сгорания в рабочее состояние.
Соединительный механизм, используемый в способе, может иметь предохранительную фрикционную муфту, способную обеспечивать передачу постоянного крутящего момента по меньшей мере на протяжении части своего диапазона пробуксовки.
Согласно четвертой особенности изобретения предложено транспортное средство, имеющее гибридный привод согласно первой или второй особенности изобретения.
Транспортное средство предпочтительно выбирают из группы, включающей автобус, грузовой автомобиль, строительное транспортное средство, фургон, пассажирское транспортное средство, катер, судно, стационарную машину или транспортное средство любого другого типа, от которого в процессе эксплуатации требуется способность относительно быстро разгоняться при частых остановках и трогании с места.
Согласно пятой особенности изобретения предложен способ управления гибридным приводом, содержащим: двигатель внутреннего сгорания; электрическую машину; коробку передач для приема тяговой мощности по меньшей мере от двигателя внутреннего сгорания и(или) электрической машины для подачи тяговой мощности на нагрузку; блок управления, связанный с возможностью взаимодействия с двигателем внутреннего сгорания, электрической машиной и коробкой передач для управления их работой; при этом привод выполнен с возможностью настройки в процессе работы так, чтобы двигатель внутреннего сгорания мог переключаться между нерабочим состоянием и рабочим состоянием, а для переключения двигателя внутреннего сгорания из нерабочего состояния в рабочее состояние его необходимо запустить, отличающийся тем, что он включает шаги, на которых:
а) вводят коробку передач в зацепление для передачи через нее крутящего момента с целью подачи тяговой мощности на нагрузку,
б) передают двигателю внутреннего сгорания крутящий момент, необходимый для проворачивания коленчатого вала при запуске двигателя, и осуществляют подачу топлива в него с целью приведения в действие двигателя внутреннего сгорания, при этом такое приведение в действие двигателя внутреннего сгорания преимущественно совпадает во времени с включением коробки передач, и
в) один или несколько вращающихся валов двигателя внутреннего сгорания и электрической машины снабжены одним или несколькими датчиками для определения показателя крутящего момента, передаваемого двигателю внутреннего сгорания при его запуске и приведении в действие, при этом блок управления обрабатывает такой показатель крутящего момента с использованием имитационной модели крутящего момента привода для управления электрическая машиной таким образом, чтобы по меньшей мере частично компенсировать любые резкие изменения крутящего момента, происходящие в приводе.
Способ может включать дополнительные шаги, на которых:
г) при нахождении коробки передач в зацепленном положении осуществляют запуск двигателя внутреннего сгорания путем поддержания вращательного состояния электрической машины;
д) по меньшей мере частично соединяют двигатель внутреннего сгорания с электрической машиной посредством вращательного соединительного механизма для передачи крутящего момента от электрической машины двигателю внутреннего сгорания и тем самым разгона двигателя внутреннего сгорания до пороговой скорости вращения и
е) осуществляют подачу топлива в двигатель внутреннего сгорания для его перевода в рабочее состояние.
Один или несколько датчиков, используемых в способе, могут быть реализованы в виде датчиков скорости вращения для измерения скорости вращения соответствующего одного или нескольких валов, при этом устройство управления вычисляет показатель крутящего момента на основании инерционных моментов составных частей привода и на основании углового ускорения, вычисляемого во времени на основании одной или нескольких измеренных скоростей вращения.
Согласно шестой особенности изобретения предложена компьютерная программа на машиночитаемом носителе данных, выполнимая компьютерным аппаратным обеспечением для реализации способа согласно четвертой или пятой особенности изобретения.
Согласно седьмой особенности изобретения предложена компьютерная программа, содержащая компьютерный программный код, рассчитанный на осуществление способа или для применения в способе согласно четвертой и пятой особенностям изобретения при выполнении компьютерной программы программируемым микрокомпьютером.
Компьютерная программа предпочтительно рассчитана на возможность загрузки в привод согласно первой или второй особенности изобретения или одного или нескольких из ее компонентов при выполнении компьютером, подключенным к Интернету.
Компьютерный программный продукт, содержащий упомянутый компьютерный программный код, предпочтительно хранится на машиночитаемом носителе.
Согласно восьмой особенности изобретения предложен способ управления гибридным приводом, содержащим двигатель внутреннего сгорания, электрическую машину и коробку передач для приема тяговой мощности по меньшей мере от двигателя внутреннего сгорания и(или) электрической машины для подачи тяговой мощности на нагрузку, при этом способ включает шаги, которые осуществляют, начиная с рабочего состояния привода, в котором подачу мощности на нагрузку обеспечивают с помощью электрической машины, и на которых:
уменьшают крутящий момент на выходе электрической машины, передаваемый коробке передач,
переключают коробку передач и
запускают двигатель внутреннего сгорания с помощью электрической машины.
Результатом осуществления способа является обеспечение рабочего состояния привода, в котором подачи мощности на нагрузку обеспечивают по меньшей мере с помощью двигателя внутреннего сгорания.
Способ особо применим для осуществления разгона в случае использования привода с одним сцеплением, когда электрическая машина расположена между двигателем внутреннего сгорания и коробкой передач, а одно сцепление расположено между двигателем внутреннего сгорания и электрической машиной. Таким образом, способ создает предпосылки для исключения второго сцепления, используемого во множестве известных из техники решений.
Кроме того, перед переключением коробки передач крутящий момент на выходе электрической машины предпочтительно уменьшают до нуля. Процедура уменьшения может быть ступенчатой, т.е. преимущественно одномоментной, но крутящий момент на выходе предпочтительно уменьшают линейно, т.е. постепенно и непрерывно.
Кроме того, стадии способа необязательно осуществляют в хронологическом порядке.
Способ предпочтительно включает шаги, на которых:
после уменьшения крутящего момента на выходе электрической машины переводят коробку передач в нейтральное положение,
после перевода коробки передач в нейтральное положение вводят передачу коробки передач в зацепление,
после ввода передачи коробки передач в зацепление линейно увеличивают крутящий момент на выходе, передаваемый коробке передач,
линейно увеличивают крутящий момент на выходе, передаваемый коробке передач, с помощью по меньшей мере крутящего момента на выходе двигателя внутреннего сгорания (путем подачи топлива в двигатель), и инициируют подачу топлива в двигатель при заданной частоте вращения двигателя.
Стадия линейного увеличения может осуществляться с использованием мощности, поступающей из электрической машины.
Способ предпочтительно включает дополнительный шаг, на котором выходные обороты двигателя внутреннего сгорания синхронизируют до линейного увеличения крутящего момента на выходе двигателя внутреннего сгорания. Способ предпочтительно включает шаг, на котором, чтобы запустить двигатель внутреннего сгорания с помощью электрической машины, приводят в действие соединительный механизм, расположенный между двигателем внутреннего сгорания и электрической машиной. Это может быть сделано множеством способов. Согласно первому примеру способ включает шаг, на котором поддерживают определенную частоту вращения электрической машины и одновременно частично включают соединительный механизм. Согласно второму примеру способ включает шаг, на котором замедляют частоту вращения электрической машины до остановки и полностью включают соединительный механизм до запуска двигателя внутреннего сгорания с помощью электрической машины.
Способ включает стадию синхронизации, на которой измеряют выходные обороты электрической машины и выходные обороты двигателя внутреннего сгорания и полностью включают соединительный механизм, если измеренные выходные обороты электрической машины и измеренные выходные обороты двигателя внутреннего сгорания находятся в заданном диапазоне величин.
Способ предпочтительно включает шаг, на котором электрической машине передают дополнительный крутящий момент, чтобы компенсировать крутящий момент, необходимый для запуска двигателя внутреннего сгорания. Способ предпочтительно включает шаг, на котором измеряют множество рабочих параметров привода, отображающих крутящий момент, и рассчитывают величину дополнительного крутящего момента, исходя из измеренных рабочих параметров привода.
Способ предпочтительно включает шаг, на котором запускают двигатель внутреннего сгорания с помощью электрической машины при нахождении коробки передач в нейтральном положении.
Способ предпочтительно включает стадию запуска двигателя внутреннего сгорания с помощью электрической машины при нахождении коробки передач во включенном положении. За счет этого может быть сокращена общая длительность процедуры запуска двигателя внутреннего сгорания и передачи крутящего момента от двигателя коробке передач. Таким образом, двигатель внутреннего сгорания предпочтительно запускают с помощью электрической машины, когда входной вал коробки передач соединен с нагрузкой. При этом условии способ предпочтительно включает шаг, на котором двигатель внутреннего сгорания запускают с помощью электрической машины во время уменьшения крутящего момента на выходе электрической машины, передаваемого коробке передач, или в качестве альтернативы во время линейного увеличения крутящего момента на выходе, передаваемого коробке передач.
На последней фазе линейного уменьшения электрическая машина имеет располагаемый крутящий момент (т.е. электрическая машина не работает на уровне своего максимального или близкого к максимальному крутящего момента на выходе), и по меньшей мере часть этого располагаемого крутящего момента может быть дополнительно использована на этой стадии. Аналогичным образом, на начальной фазе линейного увеличения электрическая машина имеет располагаемый крутящий момент (т.е. электрическая машина не работает на уровне своего максимального или близкого к максимальному крутящему моменту на выходе), и по меньшей мере часть этого располагаемого крутящего момента может быть дополнительно использована на этой стадии. Таким образом, в обоих случаях электрическая машина имеет дополнительный располагаемый крутящий момент, который может быть использован для запуска двигателя. Так, во время одной из заданных частей фазы линейного увеличения или линейного уменьшения для запуска двигателя в течение короткого интервала времени преимущественно увеличивают (предпочтительно до максимума) крутящий момент на выходе электрической машины.
Способ предпочтительно включает шаг, на котором двигатель внутреннего сгорания запускают с помощью электрической машины после синхронизации крутящего момента на выходе двигателя внутреннего сгорания.
Способ предпочтительно включает шаг, на котором двигатель внутреннего сгорания запускают с помощью электрической машины при нахождении электрической машины в рабочем состоянии, существенно отличающемся от рабочего состояния, в котором электрическая машина работает при максимальном крутящем моменте на выходе.
Способ предпочтительно включает шаг, на котором переключение передач в коробке передач осуществляют во время упомянутого перехода с подачи мощности на нагрузку с помощью электрической машины на подачу мощности на нагрузку с помощью двигателя внутреннего сгорания.
Подразумевается, что признаки изобретения могут быть объединены в любом сочетании, не выходящем за пределы объема изобретения, охарактеризованного приложенной формулой изобретения.
Краткое описание чертежей
Далее лишь в качестве примера описаны варианты осуществления настоящего изобретения со ссылкой на приложенные чертежи, на которых представлено:
на фиг.1 - схематическая иллюстрация гибридного привода, описанного в US 4533011,
на фиг.2 - схематическая иллюстрация гибридного привода, предложенного в настоящем изобретении,
на фиг.3 - диаграмма, иллюстрирующая процедуру запуска двигателя внутреннего сгорания, применяемую в гибридном приводе, показанном на фиг.2,
на фиг.4 - диаграмма, иллюстрирующая характеристики передачи крутящего момента сцеплением, применяемым в приводе, показанном на фиг.2,
на фиг.5 - схематическое представление, иллюстрирующее различные крутящие моменты, генерируемые и встречающиеся в приводе, показанном на фиг.2,
на фиг.6 - схематическая иллюстрация контура обратной связи, входящего в показанный на фиг.2 гибридный привод и служащего для уменьшения амплитуды рывков крутящего момента, происходящих во время работы привода,
на фиг.7 - иллюстрация функций управления, используемых в центральном блоке управления показанного на фиг.2 гибридного привода и служащих для уменьшения встречаемости рывков крутящего момента в гибридном приводе во время его работы, и на фиг.8 - отображение математических вычислений, выполняемых в центральном блоке управления, показанном на фиг.7.
Описание вариантов осуществления изобретения
Далее описаны варианты осуществления гибридного привода, предложенного в настоящем изобретении. После этого проиллюстрирована работа гибридных приводов. Затем описаны альтернативные варианты реализации гибридных приводов.
Хотя далее изобретение рассмотрено на примере вариантов осуществления гибридного привода автотранспортного средства, это не подразумевает какого-либо ограничения в отношении области применения изобретения. Напротив, изобретение также применимо во многих других областях, таких как, например, гибридные приводы поездов, катеров, судов и для стационарного применения.
Рассмотрим фиг.2, на которой проиллюстрирован гибридный привод, в целом обозначенный позицией 300. В конструкцию привода 300 входит относительно небольшое число составных элементов с целью обеспечения повышенной надежности и компактности. Кроме того, многие из ее элементов являются адаптацией хорошо отработанных компонентов, используемых в транспортных средствах по всему миру. Вместе с тем, гибридный привод 300 отличается от известных приводов рядом важных особенностей, которые дополнительно проиллюстрированы далее.
Привод 300 содержит двигатель 310 внутреннего сгорания с соответствующим выхлопным патрубком 320. Двигатель 310 внутреннего сгорания может являться обычным двигателем без наддува или с турбонаддувом. В частности, двигатель 310 внутреннего сгорания является дизельным двигателем, биогазовым двигателем или бензиновым двигателем. Двигатель 310 внутреннего сгорания имеет выходной коленчатый вал 340 крутящего момента, для краткости называемый выходным коленчатым валом 340, который вращательно связан с первым диском сцепления 330. Второй диск сцепления 330 посредством дополнительного вала 350 вращательно связан с узлом 360 электрической машины. Сцеплением 330 предпочтительно является сцепление типа предохранительной фрикционной муфты, которая обеспечивает характеристики передачи крутящего момента, которые описаны далее со ссылкой на фиг.4; сцепление 330 может бесступенчато регулироваться между положениями полного выключения и полного включения в пределах степеней передачи крутящего момента между ними.
Узел 360 электрической машины содержит по меньшей мере одну электрическую машину 370, которая при ее возбуждении электрической энергией не только способна генерировать механическую энергию вращения и тем самым крутящий момент на валу привода, но также способна действовать как генератор, когда она настроена на обеспечение рекуперативного торможения и тем самым тормозного момента; таким образом, электрическая машина 370 способна действовать и как электродвигатель, и как генератор. Электрическая машина 370, в частности, может быть реализована в виде индукционного устройства или в виде устройства с регулируемым магнитным сопротивлением или устройства на основе технологии постоянных магнитов. Узел 360 электрической машины дополнительно имеет вал 380 выходного крутящего момента двигателя, для краткости называемый выходным валом 380, который вращательно связан с электрической машиной 370, а также, как это проиллюстрировано, может быть посредством сцепления 330 связан с выходным коленчатым валом 340 двигателя 310 внутреннего сгорания. Кроме того, узел 360 электрической машины имеет блок 390 управления электрической машиной и блок 400 силовой электроники для переключения подачи сильного тока в электрическую машину 370 и из электрической машины 370 в зависимости от того, действует ли она как приводной электродвигатель или как генератор.
Привод 300 также имеет блок 450 аккумулирования энергии, содержащий элемент 460 для аккумулирования энергии, электрически связанный с контроллером 470 аккумулирования энергии для управления разрядкой и зарядкой элемента 460 для аккумулирования энергии. Элемент 460 для аккумулирования энергии необязательно реализован в виде аккумуляторной батареи, например, с использованием технологии никель-металл-гидридных (NiMH) батарей, усовершенствованной технологии свинцово-кислотных батарей, технологии ионно-литиевых перезаряжаемых элементов или технологии литиевых перезаряжаемых элементов с полимерным электролитом. В качестве элементов 460 для аккумулирования энергии также могут использоваться конденсаторы большой емкости. Также необязательно элемент 460 для аккумулирования энергии может быть реализован с использованием, например, технологии аккумулирования гидравлической энергии, технологии аккумулирования вращающего момента махового колеса или технологии аккумулирования механической энергии любого иного типа в сочетании с любым применимым устройством преобразования энергии (непоказанным), преобразующим: (i) электрическую энергию, вырабатываемую электрической машиной 370 (действующей как генератор), в энергию, форма которой применима для аккумулирования в упомянутом элементе 460 для аккумулирования энергии; и (ii) энергию, хранящуюся в упомянутом элементе 460 для аккумулирования энергии, в электрическую энергию для использования в электрической машине 370 (действующей как электродвигатель).
Элемент 460 для аккумулирования энергии также может быть реализован в виде сочетания нескольких таких технологий аккумулирования энергии с целью наилучшего использования индивидуальных зарядных и разрядных характеристик этих технологий.
Привод 300 и транспортное средство, на котором он установлен, имеют связанные с ними вспомогательные механизмы 480 с электроприводом, например, один или несколько механизмов, включающих электрические отопители, вентиляторы, системы защиты и системы кондиционирования воздуха в транспортном средстве. Эти вспомогательные механизмы 480 с электроприводом электрически связаны с элементом 460 для аккумулирования энергии, как это показано на фиг.2.
Упомянутый вал 380 выходного крутящего момента двигателя вращательно связан с коробкой 500 передач. Коробка 500 передач способна обеспечивать несколько дискретных передаточных отношений и нейтральное положение передачи крутящего момента от вала 380 выходного крутящего момента двигателя концевому выходному валу 510. Концевой выходной вал 510 посредством дифференциальной передачи 520 вращательно связан с нагрузкой 530 системы, пример которой показан на фиг.2 в качестве колес (нагрузки) ведомой оси транспортного средства (системы), на котором установлен привод 300.
Различные выходные валы 340, 350, 380, 510, показанные на фиг.2, также называют "вращающимися валами" или "вращающимися выходными валами".
Системой необязательно является пассажирское транспортное средство, катер, судно, автомобиль большой грузоподъемности, такой как автобус, грузовой автомобиль, строительное транспортное средство, фургон для доставки груза или транспортное средство любого другого типа, от которого в процессе эксплуатации требуется способность относительно быстро разгоняться при частых остановках и трогании с места. Тем не менее, настоящее изобретение не ограничено такими транспортными средствами. Нагрузкой 530 могут являться колеса, движители или иные средства в зависимости от характера системы.
Привод 300 дополнительно имеет центральный блок 490 управления, электрически связанный с механизмом управления (не показан), который взаимодействует со сцеплением 330, блоком 390 управления электрической машиной, контроллером 470 аккумулирования энергии и исполнительным механизмом (не показан), который взаимодействует с коробкой 500 передач. Центральный блок 490 управления способен обеспечивать интерфейс со многими входами для водителя транспортного средства, например, центральный блок 490 управления способен принимать команды разгона, торможения и переключения передач команда от водителя. Кроме того, хотя это не показано на фиг.2, привод 300 имеет датчики, расположенные в различных ключевых положениях, для измерения крутящего момента или измерения параметров сигналов для последующего расчета или оценки крутящего момента, как это показано на фиг.5; датчики преимущественно реализованы в виде датчиков скорости вращения, например, тахометров, реализованных в виде оптических или индуктивных датчиков положения, способных генерировать сигналы; на основании сигналов можно вычислить показатель крутящего момента, исходя из углового ускорения  с использованием Уравнения (1):
с использованием Уравнения (1):

в котором
Т означает крутящий момент, а
I означает момент инерции.
Центральный блок 490 управления способен выполнять различные функции, которые разъяснены далее на примере взаимодействия двигателя 310 внутреннего сгорания, сцепления 330, узла 360 электрической машины и коробки 500 передач. Кроме того, центральный блок 490 управления предпочтительно реализован с использованием компьютерного аппаратного обеспечения, представляющего собой один или несколько компьютеров.
Для известных из уровня техники гибридных приводов обычно характерна тенденция возникновения резких изменений, а именно "рывков" крутящего момента в процессе работы. Возможным способом ослабления влияния таких нежелательных рывков является применение двух выключающих сцеплений, как это описано в упомянутой публикации патента US 4533011. Тем не менее, такой способ нежелателен, в особенности, в случае крупных транспортных средств, таких как автобусы и грузовые автомобили. Упомянутый патент US 4533011 относится к личным транспортным средствам, таким как личные автомобили, микролитражные автомобили и т.п. В случае типичного привода, используемого в гибридном транспортном средстве более крупного типа, двигатель внутреннего сгорания способен развивать механическую мощность во много сот киловатт; электродвигатель также рассчитан на обеспечение выходной механической мощности порядка 100 кВт, потенциально 200 кВт и более. Таким образом, в случае применения решения, описанного в патенте US 4533011, увеличивается стоимость, вес и размеры привода, а также ухудшается надежность привода из-за увеличения числа компонентов и, соответственно, числа наименований, которые могут потенциально отказать в процессе эксплуатации. Таким образом, предложенный в изобретении привод 300, проиллюстрированный на фиг.2, имеет конфигурацию, отличающуюся от конфигурации, описанной в патенте US 4533011.
Далее со ссылкой на фиг.2 описана работа привода 300. Центральный блок 490 управления запрограммирован на периодическое приведение в действие двигателя 310 внутреннего сгорания таким образом, чтобы использовать его на протяжении наиболее эффективной части его теплового режима работы и чтобы двигатель 310 внутреннего сгорания обеспечивал уменьшенный расход топлива приводом 300. Двигатель 310 внутреннего сгорания предпочтительно имеет резонансную конструкцию. В связи с этим существуют периоды, на протяжении которых двигатель 310 внутреннего сгорания находится в выключенном состоянии, когда в него не поступает топливо. При нахождении двигателя 310 внутреннего сгорания в выключенном состоянии центральный блок 490 управления предпочтительно управляет сцеплением 330 таким образом, чтобы оно находилось в выключенном состоянии. Как описано выше, сцепление 330 по меньшей мере частично включено для передачи крутящего момента от двигателя 310 внутреннего сгорания при нахождении двигателя 310 внутреннего сгорания во включенном состоянии, когда в него поступает топливо. Центральный блок 490 управления запрограммирован на управление работой электрической машины 370, сцепления 330 и двигателя 310 внутреннего сгорания таким образом, чтобы выключение и включение двигателя 310 внутреннего сгорания в приводе 300 преимущественно не вызывало каких-либо заметных рывков крутящего момента. Такая характеристика особенно важна, когда приводом 300 оснащен автобус, который в процессе эксплуатации перевозит пассажиров в положении стоя и от которого требуется плавный и быстрый разгон в городской среде, чтобы чрезмерно не мешать уличному движению и при этом обеспечивать максимальное сбережение топлива в соответствии с экономическими требованиям и ограничениями на выброс продуктов сгорания топлива.
Как показано на фиг.4, сцепление 330 способно обеспечивать передачу преимущественно постоянного крутящего момента через него в состоянии пробуксовки при заданной величине пробуксовки, выбранной для его дисков. По оси 600 абсцисс на фиг.4 отложено увеличение коэффициента К передачи через сцепление 330, который возрастает слева направо. Кроме того, по оси 610 ординат на фиг.4 также отложен крутящий момент, передаваемый через сцепление 330 между упомянутыми валами 340, 350, при этом крутящий момент Т увеличивается снизу вверх по оси 610 ординат. Крутящий момент Т, передаваемый через сцепление 330 в качестве функции коэффициента К передачи, обозначен кривой 620, а его значения показаны в промежуточной области 630. Когда коэффициент К передачи равен 0%, оба вала 340, 350 взаимно расцеплены. Кроме того, когда коэффициент К передачи равен 100%, валы 340, 350 сцеплены друг с другом и вращаются в режиме взаимной угловой синхронизации. В промежуточной области 630 значений коэффициента К передачи сцепление 330 способно работать в режиме пробуксовки, в котором оно способно передавать крутящий момент Т постоянной величины при соответствующей заданной величине коэффициента К передачи, как это проиллюстрировано. Такая характеристика очень полезна тем, что сцепление 330 действует как фильтр внезапных изменений крутящего момента в случае рывков крутящего момента, создаваемых двигателем 310 внутреннего сгорания при его запуске, совпадающем с работой сцепления 330 с коэффициентом К в области 630. Эту характеристику преимущественно используют в настоящем изобретении, чтобы привод 300 плавно отдавал мощность колесам 530 при приведении в действие двигателя 310 внутреннего сгорания. В случае внезапного изменения крутящего момента, передаваемого через сцепление 330, например, в результате перехода двигателя 310 внутреннего сгорания из нерабочего состояния, в котором он создает тормозной момент, в рабочее состояние, в котором он является источником крутящего момента на валу привода, ступенчатое изменение крутящего момента может распространяться через привод 300 в виде рывка крутящего момента. Когда вследствие такого ступенчатого изменения сцепление 330 резко переходит из состояния пробуксовки в синхронизированное состояние, сцепление 330 больше не обеспечивает характеристики фильтрации изменений крутящего момента, в результате чего происходит ступенчатое изменение крутящего момента, а именно потенциально рывок, который распространяется через привод 300; тем не менее, настоящее изобретение способно ослаблять распространение таких рывков.
Центральный блок 490 управления способен избирательно использовать две различные процедуры запуска двигателя 310 внутреннего сгорания, за счет чего значительно ослабляется (нежелательное) влияние рывков или прерываний крутящего момента привода, располагаемого на выходном валу 510 привода 300. Рассмотрим первую процедуру со ссылкой на фиг.3, на которой по оси 700 абсцисс слева направо отложено истекшее время, а по оси 710 ординат отложен крутящий момент, передаваемый колесам 530 через коробку 500 передач. Кривой 720 обозначен крутящий момент Т привода, передаваемый через коробку 500 передач на протяжении переходных стадий Р1-Р7.
Согласно первой процедуре осуществляют следующие шаги:
(а) на шаге Р1 двигатель 310 внутреннего сгорания находится в выключенном состоянии, электрическая машина 370 запитана от элемента 460 для аккумулирования энергии и создает крутящий момент Т привода, передаваемый через коробку 500 передач на нагрузку 530,
(б) на шаге Р2 электрическую мощность, поступающую из элемента 460 для аккумулирования энергии в электрическую машину 370, постепенно линейно уменьшают, чтобы уменьшить крутящий момент, передаваемый зубчатым колесам коробки 500 передач,
(в) на шаге Р3 центральный блок 490 управления передает исполнительным элементам, связанным с коробкой 500 передач, команду перевести коробку 500 передач в нейтральное положение с целью расцепления валов 380, 510,
(г) на шаге Р4 по меньшей мере частично включают сцепление 330, после чего подают электрическую мощность в электрическую машину 370 с целью запуска двигателя 310 внутреннего сгорания на определенный период времени в типичном диапазоне от 50 миллисекунд до 2 секунд, более предпочтительно от 0,25 секунд до 1 секунды; на протяжении этого периода начинают подачу топлива в двигатель 310 внутреннего сгорания, чтобы перевести двигатель 310 внутреннего сгорания во включенное состояние; при работе двигателя 310 внутреннего сгорания в установившемся режиме сцепление 330 необязательно включают полностью, а именно с коэффициентом К передачи = 100%,
(д) на шаге Р5 центральный блок 490 управления корректирует по меньшей мере норму подачи топлива в двигатель 310 внутреннего сгорания и(или) электрическую мощность, подаваемую в электрическую машину 370, таким образом, чтобы синхронизировать взаимную частоту вращения валов 380, 510, после чего вводят в зацепление коробку 500 передач,
(е) на шаге Р6 центральный блок 490 управления увеличивает выходной крутящий момент по меньшей мере электрической машины 370 и(или) двигателя 310 внутреннего сгорания,
(ж) на шаге Р7 варьируют передаваемый коробке 500 передач крутящий момент в зависимости от запроса водителя, принимаемого центральным блоком 490 управления.
На шаге (г) также необязательно частично включают сцепление 330 с целью по меньшей мере частичной фильтрации передачи рывков крутящего момента между двигателем 310 внутреннего сгорания и электродвигателем 370.
Первая процедура может быть осуществлена несколькими различными способами. На шаге (г), соответствующем шагу Р4:
(i) электрической машине 370 сообщают заданную скорость вращения с использованием блока 390 управления электрической машиной, в который поступают команды из центрального блока 490 управления. Затем частично включают сцепление 330, чтобы коэффициент К передачи был менее 100%, и передают соответствующий крутящий момент с целью разгона выходного вала 340 двигателя 310 внутреннего сгорания. По достижении выходным валом 340 двигателя 310 внутреннего сгорания достаточно высокой скорости начинают подачу топлива в двигатель 310 внутреннего сгорания, чтобы перевести двигатель 310 внутреннего сгорания во включенное состояние. Затем при желании регулируют сцепление 330, чтобы обеспечить полную передачу через него крутящего момента, а именно с коэффициентом К передачи = 100%, или в качестве альтернативы
(ii) электрическую машину 370 останавливают, например, путем рекуперативного торможения, чтобы ее вращательная энергия использовалась для зарядки элемента 460 для аккумулирования энергии. Затем полностью включают сцепление 330, чтобы коэффициент К передачи = 100%. После этого электрическую машину 370 используют для обеспечения крутящего момента для проворачивания выходного вала 340 двигателя внутреннего сгорания 310 и тем самым разгона выходного вала 340 двигателя 310 внутреннего сгорания. Когда выходной вал 340 вращается с достаточно высокой скоростью, в двигатель 310 внутреннего сгорания подают топливо, чтобы привести в действие двигатель 310 внутреннего сгорания.
Согласно варианту (i) потенциально требуется меньшее время для приведения в действие двигателя 310 внутреннего сгорания. Вариант (ii) является потенциально более энергосберегающим.
Важно, что шаги с P1 по P7 предпочтительно осуществляют в сочетании с переключением передач в коробке 500 передач, поскольку на шаге (в), соответствующем шагу Р3, необходимо, чтобы коробка 500 передач находилась в нейтральном положении. В случае осуществление первой процедуры в сочетании с переключением передач оно может длиться немного дольше, чем соответствующее простое переключение передач, когда двигатель 310 внутреннего сгорания не приведен в действие. Тем не менее, на практике это не создает затруднений, в особенности, в случае более крупных систем, таких как грузовые автомобили, автобусы, катера, суда и т.п.
В некоторых ситуациях, в которых необходимо использовать привод 300, предпочтительно, чтобы передача мощности на нагрузку 530, например, колеса не прерывалась во время приведения в действие двигателя 310 внутреннего сгорания. Такая ситуация возникает, например, при эксплуатации автобуса в городских условиях строгих ограничений выброса отработанных газов, когда необходимо осуществить плавный разгон автобуса, чтобы войти в поток городского транспорта без ощутимых для находящихся внутри пассажиров рывков, которые способны стать угрозой безопасности. В настоящем изобретении учтены два важных вопроса, а именно:
(а) способность сцепления 330 при нахождении в диапазоне 630 пробуксовки обеспечивать фильтрацию рывков крутящего момента и
(б) возможность очень точного управления электродвигателем 370, более точного, чем двигателем 310 внутреннего сгорания путем регулирования подачи топлива, чтобы можно было быстро варьировать его крутящий момент и вращающий момент.
Это важно учитывать при описании предложенной в изобретении второй процедуры приведения в действие двигателя 310 внутреннего сгорания; переход двигателя 310 внутреннего сгорания из выключенного состояния, в котором он создает тормозной момент, во включенное состояние, в котором он создает крутящий момент привода, может вызвать внезапное изменение крутящего момента, передаваемого через сцепление 330, в результате чего, например, сцепление 330 быстро достигнет синхронизированного состояния.
Во-первых, при описании второй процедуры сначала поясним равновесие крутящих моментов в приводе 300. Как показано на фиг.5, крутящий момент Tdes представляет собой крутящий момент, который желательно передать коробке 500 передач, когда коробка 500 передач введена в зацепление. Крутящий момент Tb, ЕМ представляет собой крутящий момент, передаваемый электрической машиной 370, которая непосредственно связана с коробкой 500 передач, как это показано на фиг.2 и 5 ("ЕМ" является сокращенным обозначением "электрической машины" от английского - electric machine). Однако, когда двигатель 310 внутреннего сгорания находится в выключенном состоянии, а сцепление 330 по меньшей мере частично включено и создает тормозной момент TCL, например, в области 630, показанной на фиг.4, располагаемый крутящий момент Tdes на входе коробки 500 передач описывается следующим Уравнением 2:

Таким образом, когда сцепление 330 полностью выключено и коэффициент К передачи = 0%, ситуация чистого электрического привода в приводе 300 описывается Уравнением 3:

С целью обеспечения плавного запуска двигателя 310 внутреннего сгорания, когда коробка 500 передач введена в зацепление, центральный блок 490 управления способен точно регулировать возбуждение электрической машины 370 таким образом, чтобы получить заданное значение крутящего момента Tset,ЕМ согласно следующему Уравнению 4:

Авторы исходили из того, что при осуществлении настоящего изобретения крутящий момент TCL, передаваемый через сцепление 330 ("CL" является сокращенным обозначением "сцепления" (от английского clutch)), может быть измерен датчиками крутящего момента; однако прецизионные датчики крутящего момента обычно являются дорогостоящими. Кроме того, авторы исходили из того, что крутящий момент TCL также может быть рассчитан, исходя из упомянутого коэффициента К передачи, который соответствует степени пробуксовки между дисками сцепления 330; однако такой расчет не обеспечивает точных результатов и имеет тенденцию давать погрешность по мере износа сцепления 33. При создании усовершенствованного способа измерения крутящего момента TCL, передаваемого через сцепление 330, авторы исходили из того, что при условии, что известны моменты инерции, может быть применена зависимость из Уравнения 1, а именно путем измерения углового ускорения  . Таким образом, из Уравнений 2-4 можно вывести Уравнение 5:
. Таким образом, из Уравнений 2-4 можно вывести Уравнение 5:

в котором
Tfric,ICE означает собственное трение двигателя 310 внутреннего сгорания, а
Tind,ICE означает указанный крутящий момент, развиваемый двигателем 310 внутреннего сгорания,
при этом "ICE" является сокращенным обозначением "двигателя внутреннего сгорания" (от английского - internal combustion engine).
Таким образом, если известен инерционный момент двигателя 310 внутреннего сгорания, сопротивление трению внутри двигателя 310 внутреннего сгорания и механическая энергия, отдаваемая двигателем 310 внутреннего сгорания, можно вычислить крутящий момент TCL, позволяющий центральному блоку 490 управления избирательно осуществлять возбуждение электрической машины 370 в соответствии с Уравнением 4, чтобы компенсировать любые рывки крутящего момента, происходящие при приведении в действие двигателя 310 внутреннего сгорания, например, вызываемые внезапной синхронизацией сцепления 330, когда двигатель 310 приводят в действие для обеспечения крутящего момента привода.
Вторая процедура также может необязательно применяться во время переключений передач с целью обеспечения совершенно гладкой характеристики привода 300 при приведении в действие двигателя 310 внутреннего сгорания.
Хотя выше описаны первая и вторая процедуры приведения в действие двигателя 310 внутреннего сгорания, выключение двигателя 310 внутреннего сгорания также способно приводить к вибрациям по мере того, как частота вращения его вала проходит через различные формы механического резонанса двигателя 310 внутреннего сгорания. При нахождении коробки 500 передач в нейтральном положении электрическая машина 370 может необязательно использоваться для создания сильного усилия рекуперативного торможения с целью более или менее быстрого перевода выходного вала 340 двигателя 310 внутреннего сгорания в установившееся состояние после того, как была прервана подача топлива в двигатель 310 внутреннего сгорания, за счет чего сокращается период перехода из включенного состояния в выключенное состояние, в котором может происходить возбуждение упомянутых форм колебаний. Такое быстрое замедление вращения выходного вала 340 может сопровождаться использованием энергии, рекуперированной электрической машиной 370, для перезарядки элемента 460 для аккумулирования энергии.
Как пояснено выше, центральный блок 490 управления способен с использованием имитации величин равновесия крутящих моментов в соответствии с Уравнением 5 вычислять величину рывков крутящего момента, происходящих в приводе 300, и использовать величины неравновесия крутящих моментов, являющихся причиной таких рывков крутящего момента, с целью получения применимого сигнала управления для определения мгновенного значения мощности, которую необходимо отдать электрической машине 370 с целью преимущественно сведения к нулю и тем самым устранения таких рывков крутящего момента. Блок 490 управления необязательно также способен обеспечивать демпфирование крутящего момента, как это схематически проиллюстрировано на фиг.6, на которой позицией 1000 в целом обозначен альтернативный вариант упомянутого привода 300. Альтернативный привод 1000 имеет датчики скорости вращения вала, установленные на выходном валу 380 для определения скорости ωEM вращения, и на концевом выходному валу 510 для определения скорости ωSH вращения выходного приводного вала. При нахождении двигателя 310 внутреннего сгорания в одном или нескольким из состояний, включающих провернутое состояние коленчатого вала двигателя, состояние запуска и выключенное состояние, с целью обеспечения совершенно гладкой характеристики передачи мощности крутящий момент TS,OP, подаваемый на концевой выходной вал 510, в идеале не должен претерпевать резких изменений независимо от того, включена ли коробка 500 передач, и от состояния включения сцепления 330.
На одной оси со сцеплением 330 необязательно установлена податливая в угловом направлении пружина-ограничитель 1010 передаваемого крутящего момента. Пружина-ограничитель 1010 передаваемого крутящего момента отображает угловую разность Δθ между валами 340, 350, пропорциональную мгновенной разности между крутящими моментами Tbi, ICE и Tb, ЕМ. За счет генерируемого электрической машиной 370 крутящего момента Tb, ЕМ, быстро меняющегося в зависимости от подаваемой в нее мощности, например, с использованием оптического тахометра или индуктивного вращающегося датчика могут быть определены скорости вращения ωEM и в порядке отрицательной обратной связи переданы блоку 490 управления посредством функции F1 обратной связи, чтобы электрическая машина 370 поддерживала скорость вращения ωЕМ, относительно плавно меняющуюся в зависимости от внезапных изменений крутящего момента Tbi, ICE, подаваемого посредством сцепления 330 из двигателя 310 внутреннего сгорания. Функция F1 необязательно является пропорционально-интегрально-дифференциальной (PID, от английского - proportional-integral-derivative) функцией обратной связи, хотя в качестве альтернативы могут применяться другие функции обратной связи. Когда в качестве функции F1 применяется PID-функция обратной связи с пропорциональными, целыми и разностными отношениями CP, Ci, Cd, эти отношения можно по отдельности регулировать в центральном блоке 490 управления, и они необязательно динамически меняются в зависимости от условий эксплуатации привода 1000. За счет установки датчика, используемого для измерения скорости вращения ωЕМ, на том же валу, что и ротор электрической машины 370, преимущественно исключается мгновенный мертвый ход и задержка распространения вращения. С целью дальнейшего улучшения характеристики плавности привода 1000, в частности, предусмотрен дополнительный датчик скорости вращения для контроля скорости вращения ωSH, показания которого в порядке отрицательной обратной связи передают посредством функции F2 обратной связи, чтобы электрическая машина 370 поддерживала скорость вращения ωЕМ, относительно плавно меняющуюся в зависимости от внезапных изменений крутящего момента Tbi,ICE, подаваемого посредством сцепления 330 из двигателя 310 внутреннего сгорания. С учетом мертвого хода, потенциально возникающего в коробке 500 передач, функция F2 обратной связи преимущественно имеет более длительную временную константу, чем функция F1 обратной связи. Функция F2 также необязательно является пропорционально-интегрально-дифференциальной (PID) функцией обратной связи, хотя в качестве альтернативы могут применяться другие функции обратной связи. Когда в качестве функции F2 применяется PID-функция обратной связи с пропорциональными, целыми и разностными отношениями CP, Ci, Cd, эти отношения можно по отдельности регулировать в центральном блоке 490 управления, и они необязательно динамически меняются в зависимости от условий эксплуатации привода 1000.
Одна или несколько из функций F1, F2 обратной связи необязательно реализованы с использованием программного обеспечения, выполняемого компьютерным аппаратным обеспечением центрального блока 490 управления. Также необязательно коэффициенты обратной связи, а именно коэффициенты усиления, применяемые для реализации одной или нескольких функций F1, F2, могут динамически меняться в зависимости от запуска и остановки двигателя 310 внутреннего сгорания и(или) от переключения передачи в коробке 500 передач. Таким образом, за счет применения схемы обратной связи, показанной на фиг.6, электрической машиной 370 по меньшей мере частично компенсируются рывки крутящего момента, возникающие в результате запуска и остановки двигателя 310 внутреннего сгорания, и одновременно предотвращается тенденция возбуждения динамических колебаний скоростей вращения валов.
Как пояснено выше со ссылкой на Уравнение 5, центральный блок 490 управления способен применять результаты Мехр вычисления равновесия крутящих моментов для определения наиболее приемлемого мгновенного крутящего момента, который должна передать электрическая машина 370, чтобы по меньшей мере частично компенсировать рывки крутящего момента, возникающие в результате запуска и остановки двигателя 310 внутреннего сгорания, необязательно под влиянием пробуксовки, возникающей в сцеплении 330. Такая компенсация с использованием результатов вычислений, основанных на равновесии крутящих моментов, проиллюстрированная в Уравнении 5, может быть дополнена обратной связью для компенсации внезапных колебаний крутящего момента, как это показано на фиг.6 и как это пояснено выше, для обеспечения улучшенных характеристик.
Как показано на фиг.7, центральный блок 490 управления рассчитан на реализацию функции управления с обратной связью, преимущественно, как это проиллюстрировано; в порядке примера на фиг.8 представлен альтернативный вариант функции управления. Параметрами Pi, вводимыми в блок 490 управления, могут являться один или несколько из следующих параметров:
(а) потребление мощности, задаваемое оператором привода 300, 1000;
например, когда привод 300, 1000 установлен на транспортном средстве, чтобы приводить его в движение, потребление мощности соответствует степени, до которой водитель транспортного средства нажимает на педаль акселератора транспортного средства,
(б) передаточное отношение, выбираемое оператором, например, предпочтительная передача и(или) команда коробке 500 передач перейти на повышающую или понижающую передачу,
(в) нагрузка, приводимая в действие приводом 300, 1000; например, когда привод 300, 1000 установлен, чтобы приводить в движение транспортное средство, нагрузка, перевозимая транспортным средством, например, число перевозимых в автобусе пассажиров (т.е. загружен ли автобус полностью или не полностью), является полезным рабочим параметром для использования блоком 490 управления,
(г) местность, на которой используется привод 300, 1000, когда он рассчитан на приведение в движение транспортного средства; транспортное средство может иметь датчик глобального позиционирования (GPS, от английского - global positioning sensor), способный определять местоположение транспортного средства по данным GPS на поверхности земли, при этом блок 490 управления имеет доступ к базе картографических данных для определения, исходя из местоположения по данным GPS, профиля уклона, по которому движется транспортное средство, и(или) обнаружения указателя маневров поворота, которые вскоре потребуется выполнить транспортному средству; блок 490 управления преимущественно запрограммирован предвосхищать переключения передач и(или) требование автоматической остановки или запуска двигателя 310 внутреннего сгорания таким образом, чтобы обеспечивать оптимально плавную характеристику крутящего момента привода, передаваемого колесам транспортного средства без каких-либо рывков крутящего момента, возникающих в результате остановки и запуска двигателя 310 внутреннего сгорания; блок 490 управления необязательно способен через регулярные интервалы контролировать местоположение по данным GPS, чтобы определить, например, путем обращения к базе данных, действуют ли в местоположении по данным GPS какие-либо особые условия или ограничения, такие как в зонах с требованиями к чистоте воздуха, в которых работа привода 300, 1000 ограничена только применением электрической машины 370, а двигатель 310 внутреннего сгорания должен находиться в нерабочем состоянии в пределах зоны с требованиями к чистоте воздуха,
(д) угол поворота управляемых колес транспортного средства, когда привод 300, 1000 установлен на транспортном средстве, чтобы приводить его в движение,
(е) потребление тормозной мощности, когда привод 300, 1000 установлен на транспортном средстве, чтобы приводить его в движение, при этом потребление тормозной мощности используют для уменьшения скорости движения транспортного средства; такое торможение необязательно осуществляют как рекуперативное торможение для накопления кинетической энергии транспортного средства в виде аккумулированной энергии в элементе 460 для аккумулирования энергии; блок 490 управления способен регулировать поток энергии из электрической машины 370 в элемент 460 для аккумулирования энергии.
Блок 490 управления имеет многопараметрическую функцию 1020 вычисления разностей для приема входных параметров Pi и применения первого матричного преобразования К1 во временных интервалах к входным параметрам Pi с целью получения соответствующих первых промежуточных параметров Pmi, t, описываемых Уравнением 7:

Кроме того, вычислительная функция 1020 блока 490 управления позволяет вводить параметры обратной связи, обозначенные как Rk. Параметрами Rk обратной связи являются один или несколько из следующих параметров:
(ж) скорости вращения одного или нескольких валов 340, 350, 380, 510,
(з) работает ли двигатель 310 внутреннего сгорания и потребляет ли он топливо,
(и) регулирование сцепления 330 в зависимости от передачи крутящего момента через него и возникающей в нем пробуксовки,
(к) доля энергии, отдаваемой электрической машине 370 или генерируемой электрической машиной 370, и
(л) крутящий момент, генерируемый на валу 510, например, измеренный с использованием установленного на нем датчика крутящего момента.
Многопараметрическая функция 1020 вычисления разностей дополнительно позволяет применять второе матричное преобразование К2 во временных интервалах к параметрам Rk обратной связи с целью получения соответствующих вторых промежуточных параметров Rmi, t, описываемых Уравнением 8:

Затем первые и вторые промежуточные параметры вводят в модельное представление Уравнения 5, а именно имитацию крутящего момента, описывающую равновесие крутящих моментов в приводе 300, 1000. Многопараметрическая функция 1050 вычитания генерирует параметры Q ошибок с использованием упомянутого Уравнения 5 равновесия крутящих моментов, как это показано в Уравнении 9:

Параметры Qi ошибок используют для приведения в действие коробки 500 передач, электрической машины 370, сцепления 330, двигателя 310 внутреннего сгорания, а также необязательно для передачи в порядке обратной связи параметров демпфирования в качестве функции времени t, как это показано на фиг.6.
За счет использования усовершенствованного управления с обратной связью в центральном блоке 490 управления можно значительно улучшить характеристики привода 300, 1000, в особенности, что касается более точного противодействия рывкам крутящего момента, происходящим при периодическом включении и последующем выключении двигателя 310 внутреннего сгорания.
Далее в порядке примера описана работа транспортного средства, имеющего одну из приводов 300, 1000.
В первом примере транспортное средство движется по дороге, поверхность которой является преимущественно горизонтальной, при этом транспортное средство приводится в движение исключительно электрической машиной 370, которая питается от элемента 460 для аккумулирования энергии. Водитель транспортного средства усиливает нажатие на педаль акселератора транспортного средства, в результате чего блок 490 управления увеличивает мощность, подаваемую в электрическую машину 370. Когда электрическая машина 370 приближается к своей максимально допустимой скорости вращения, блок 490 управления расцепляет коробку 500 передач и электрическую машину 370, после чего использует электрическую машину для запуска двигателя 310 внутреннего сгорания, чтобы перевести двигатель 310 внутреннего сгорания в рабочее состояние. После этого блок 490 управления дает коробке 500 передач команду перейти на повышающую передачу и затем включает электрическую машину 370, которая теперь посредством сцепления 330 вращательно соединена с двигателем 310 внутреннего сгорания, находящимся в рабочем состоянии. За счет запуска двигателя 310 внутреннего сгорания с использованием электрической машины 370 при нахождении коробки 500 передач в расцепленном положении водитель транспортного средства преимущественно не ощущает рывков крутящего момента.
Во втором примере транспортное средство движется по идущей в гору дороге и приводится в движение исключительно электрической машиной 370. Водитель транспортного средства усиливает нажатие на педаль акселератора. Исходя из местоположения транспортного средства по данным GPS, соотнесенного с базой картографических данных, блок 490 управления определяет, что транспортное средство приближается к вершине подъема, за которой следует длинный спуск. Блок 490 управления вычисляет, что выгодно продолжать приводить в движение транспортное средство за счет исключительно электрической машины 370, и переключает коробку 500 передач на одну передачу выше в ответ на дополнительное нажатие на педаль акселератора. Вскоре транспортное средство приближается к вершине подъема, после чего ускоряется на спуске, и при этом блок 490 управления использует электрическую машину 370 в качестве рекуперативного тормоза для зарядки элемента 460 с целью аккумулирования энергии и тем самым предотвращения чрезмерного ускорения транспортного средства под действием гравитационной силы. Когда транспортное средство приближается к расположенному ниже участку спуска, блок 490 управления принимает решение запустить двигатель 310 внутреннего сгорания с использованием момента, приобретенного транспортным средством, двигающимся вниз по склону, при этом электрическая машина 370 способна компенсировать любые мгновенные рывки крутящего момента, возникающие при достижении двигателем 310 внутреннего сгорания рабочего состояния. За счет этого блок 490 управления избегает необходимости использовать двигатель 310 внутреннего сгорания при приближении к вершине подъема и последующем спуске вниз по склону.
Тем самым изобретение не только способно уменьшать износ двигателя 310 внутреннего сгорания, но и сокращать общий расход топлива транспортным средством. Хотя рывки крутящего момента наиболее эффективно устраняются путем приведения в действие двигателя 310 внутреннего сгорания, когда коробка 500 передач расцеплена с электрической машиной 370, подразумевается, что блок 490 управления также способен ослаблять ощущаемую величину рывков крутящего момента, возникающих, когда двигатель 310 внутреннего сгорания запускают посредством сцепления 330 одновременно с включением привода посредством коробки 500 передач для приведения в движение транспортного средства; это достигается за счет компенсации крутящего момента на основании вычисления крутящего момента, осуществляемого преимущественно согласно упомянутому Уравнению 5. Вес транспортного средства также является важным фактором, определяющим нагрузку, которую требуется доставить в гору, а также количество энергии, которое может быть получено путем применения рекуперативного торможения, и, следовательно, полезным параметром для ввода в блок 490 управления. Вес транспортного средства может быть предпочтительно определен тензодатчиками, связанными с системой подвески транспортного средства.
Хотя настоящее изобретение описано выше на примере приводов 300, 1000, подразумевается, что оно не ограничено применением в такой структуре и может быть адаптировано для применения в приводах с другими структурами. Таким образом, в описанные варианты осуществления изобретения могут быть внесены усовершенствования, не выходящие за пределы объема изобретения, охарактеризованного в приложенной формуле изобретения.
Центральный блок 490 управления реализован в виде структуры из одного или нескольких компьютеров, установленных в приводах 300, 1000, как это показано на фиг.2-8 и указано выше в описании. Блок 490 управления необязательно имеет множество пространственно разнесенных вокруг приводов 300, 1000 процессоров для обработки данных, при этом множество процессоров соединены друг с другом сетями связи, например, шиной CAN и т.п. Кроме того, центральный блок 490 управления способен выполнять одну или несколько компьютерных программ для реализации изобретения. Помимо этого, блок 390 управления предпочтительно имеет интерфейс для приема такой одной или нескольких компьютерных программ от внешнего по отношению к приводам 300, 1000 источника, что позволяет в дистанционном режиме модернизировать центральный блок 490 управления с помощью новых версий одной или нескольких компьютерных программ. Интерфейс может быть реализован в виде электрического разъема для твердотельного постоянного запоминающего устройства (ПЗУ), оптического диска, магнитного диска, служащего носителем данных одной или нескольких компьютерных программ. В качестве альтернативы или дополнительно интерфейс имеет линию беспроводной связи, позволяющую загружать одну или несколько компьютерных программ в центральный блок 490 управления посредством сигнала беспроводной передачи данных, например, посредством фирменной технологии "Blue Tooth" или сетей мобильной (сотовой) телефонной связи. Одна или несколько компьютерных программ могут быть необязательно загружены в центральный блок 490 управления посредством сети передачи данных, например Интернет.
Хотя выше описано применение приводов 300, 1000 на примере транспортных средств, например автобусов и грузовых автомобилей, подразумевается, что они также применимы в системах других типов, например, в пассажирских транспортных средствах, трамваях, поездах, катерах, судах и стационарных системах энергоснабжения.
Такие обороты, как "имеющий", "содержащий", "включающий", "состоящий из", "иметь", "являться", используемые в описании и формулировках настоящего изобретения, следует толковать не в исключительном или исчерпывающем смысле, а именно принимая во внимание наличие также не описанных в прямой форме возможных других наименований, компонентов или элементов. Упоминание единственного числа следует также считать относящимся к множественному числу (если не оговорено другое). Заключенные в скобки цифровые позиции в приложенной формуле изобретения имеют целью облегчить ее понимание и в любом случае не должны толковаться в качестве ограничения объекта, заявленного в формуле изобретения.
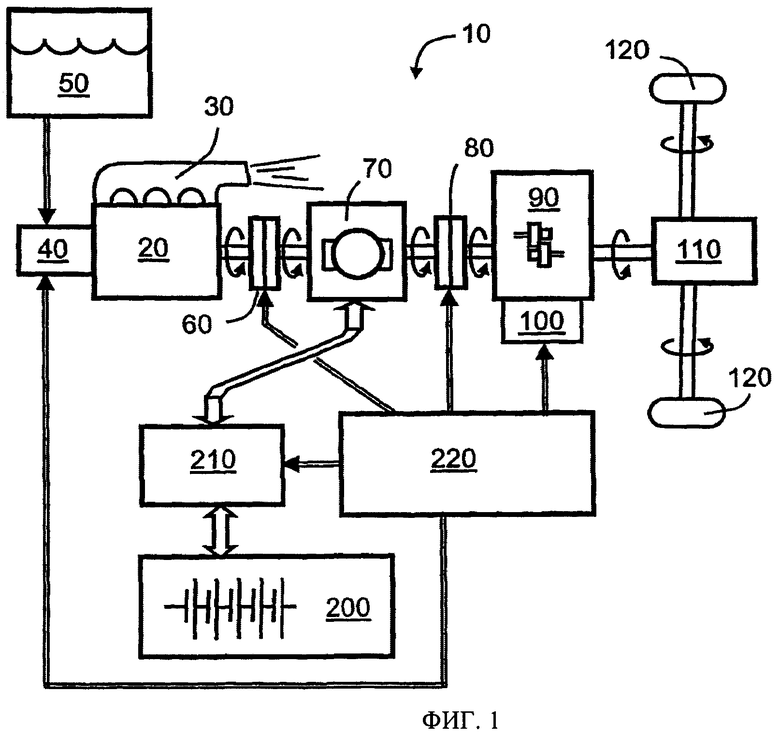
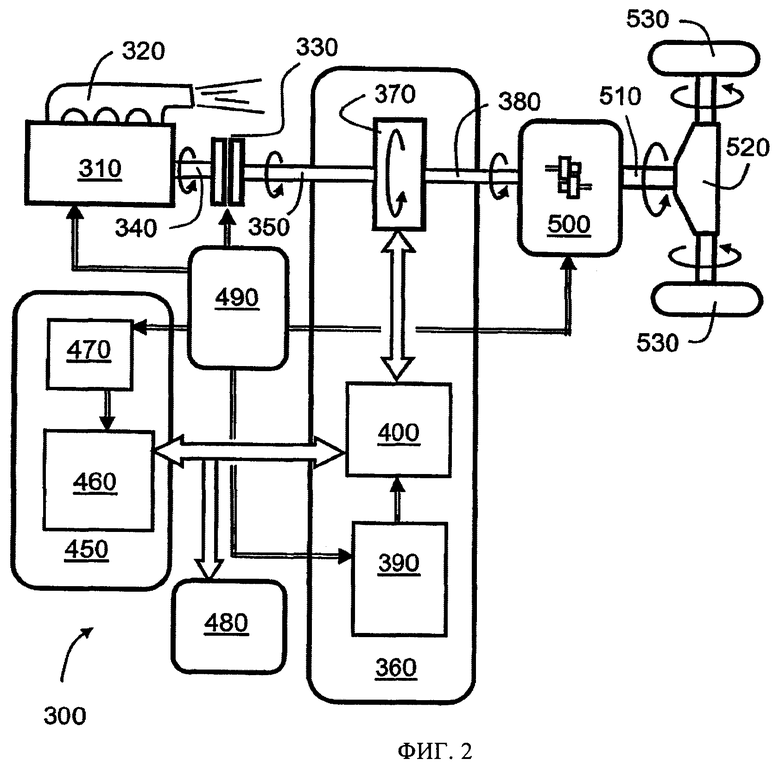
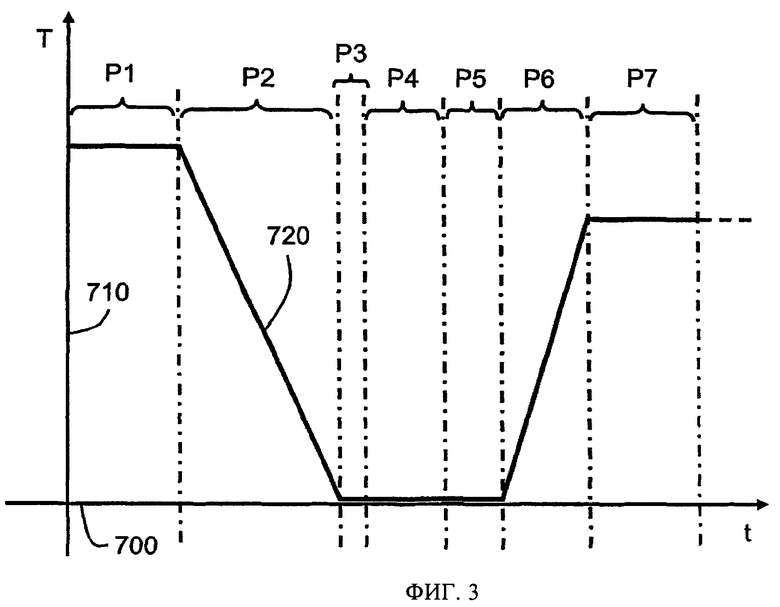



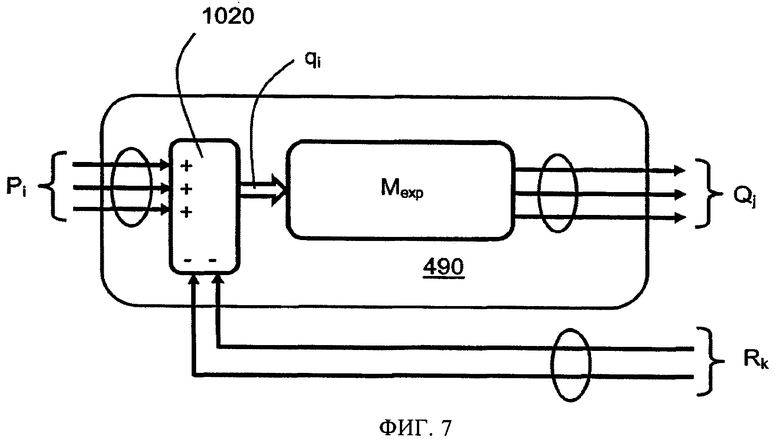
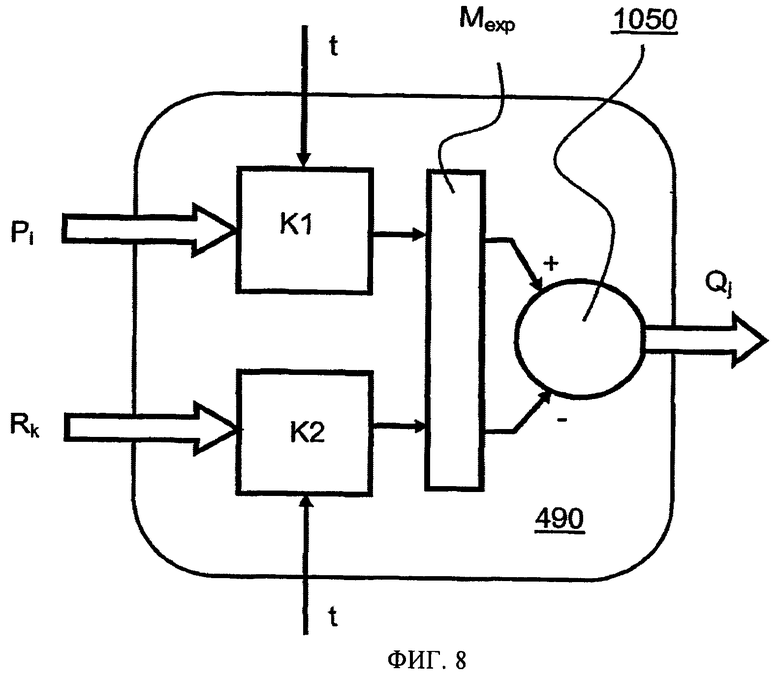
Изобретение относится к гибридным приводам. Гибридный привод по первому, второму и третьему варианту содержит двигатель внутреннего сгорания, узел электрической машины, коробку передач, блок управления. Транспортное средство включает один из вариантов гибридного привода. Способ управления гибридным приводом по первому, второму и третьему варианту включает настройку в процессе его работы так, чтобы двигатель внутреннего сгорания мог переключаться между нерабочим состоянием и рабочим состоянием. Способ по первому варианту включает шаги, на которых принимают сигналы обратной связи, сигналы управления и подают выходные сигналы. Способ по второму варианту включает шаги, на которых вводят коробку передач в зацепление для передачи через нее крутящего момента, передают двигателю внутреннего сгорания крутящий момент, определяют показатель крутящего момента, передаваемого двигателю внутреннего сгорания при его запуске и приведении в действие, обеспечивают компенсацию резких изменений крутящего момента. Способ по третьему варианту включает шаги, на которых уменьшают крутящий момент на выходе узла электрической машины, переключают коробку передач, запускают двигатель внутреннего сгорания с помощью узла электрической машины, передают электрической машине дополнительный крутящий момент. Блок управления приводом обеспечивает управление в соответствии с одним из вариантов способа. Технический результат заключается в улучшении характеристик в отношении ослабления внезапных колебаний крутящего момента. 8 н. и 40 з.п. ф-лы, 8 ил.
1. Гибридный привод (300, 1000), содержащий двигатель (310) внутреннего сгорания, узел (360) электрической машины, коробку (500) передач для приема тяговой мощности по меньшей мере от двигателя (310) внутреннего сгорания и(или) узла (360) электрической машины и подачи соответствующей тяговой мощности на нагрузку (530), блок (490) управления, связанный с двигателем (310) внутреннего сгорания, узлом (360) электрической машины и коробкой (500) передач для управления их работой, при этом привод (300, 1000) выполнен с возможностью настройки в процессе работы так, чтобы двигатель (310) внутреннего сгорания мог переключаться между нерабочим состоянием и рабочим состоянием, причем для переключения двигателя (310) внутреннего сгорания из нерабочего состояния в рабочее состояние его необходимо запустить, отличающийся тем, что блок (490) управления имеет множество входов для приема сигналов обратной связи, поступающих от привода (300, 1000), и сигналов управления, передаваемых приводу (300, 1000), и множество выходов для вывода выходных сигналов для управления работой привода (300, 1000), и блок (490) управления дополнительно содержит компьютерное аппаратное обеспечение, способное осуществлять имитацию крутящего момента привода (300, 1000), которую используют в процессе работы для обработки информации, поступающей на множество входов для вычисления компенсации, причем упомянутый блок (490) управления способен осуществлять компенсацию на множестве упомянутых выходов для ослабления амплитуды рывков крутящего момента, происходящих в процессе работы привода (300, 1000), когда двигатель (310) переключают между рабочим и нерабочим состояниями.
2. Гибридный привод (300, 1000) по п.1, в котором блок (490) управления способен в процессе работы регулировать передачу двигателю (310) внутреннего сгорания крутящего момента, необходимого для запуска двигателя, таким образом, чтобы она по существу совпадала во времени с переключением передач в коробке (500) передач.
3. Привод (300, 1000) по п.2, в котором при нахождении коробки (500) передач в нейтральном положении двигатель (310) внутреннего сгорания может быть запущен путем замедления узла (360) электрической машины преимущественно до остановки, по меньшей мере частичного вращательного соединения двигателя (310) внутреннего сгорания с узлом (360) электрической машины посредством вращательного соединительного механизма (330), возбуждения узла (360) электрической машины с целью сообщения ей ускорения вращательного движения и тем самым разгона двигателя (310) внутреннего сгорания до пороговой скорости вращения и затем подачи топлива в двигатель (310) внутреннего сгорания для перевода его в рабочее состояние.
4. Привод (300, 1000) по п.2, в котором при нахождении коробки (500) передач в нейтральном положении двигатель (310) внутреннего сгорания может быть запущен путем поддержания вращательного состояния узла (360) электрической машины, по меньшей мере частичного соединения двигателя (310) внутреннего сгорания с узлом (360) электрической машины посредством вращательного соединительного механизма (330) для передачи крутящего момента от узла (360) электрической машины двигателю (310) внутреннего сгорания и тем самым разгона двигателя (310) внутреннего сгорания до пороговой скорости вращения и затем подачи топлива в двигатель (310) внутреннего сгорания для перевода его в рабочее состояние.
5. Привод (300, 1000) по п.3 или 4, в котором вращательным соединительным механизмом (330) является предохранительная фрикционная муфта (330), способная обеспечивать передачу постоянного крутящего момента по меньшей мере на протяжении части своего диапазона (630) пробуксовки.
6. Привод (300, 1000) по любому из пп.1-4, в котором вращательный соединительный механизм (330) привода (300) имеет сцепление (330), установленное между двигателем (310) внутреннего сгорания и узлом (360) электрической машины.
7. Привод (300, 1000) по п.6, в котором узел (360) электрической машины связан с двигателем (310) внутреннего сгорания путем последовательного расположения сцепления (330) и муфты (1010) для передачи крутящего момента с ограничением по вращению.
8. Привод (300) по любому из пп.1-4, в котором один или несколько вращающихся валов (340, 350, 380) двигателя (310) внутреннего сгорания и узел (360) электрической машины снабжены одним или несколькими связанными с блоком (490) управления датчиками, способными определять показатель крутящего момента, передаваемого двигателю (310) внутреннего сгорания при его запуске и приведении в действие, при этом блок (490) управления способен обрабатывать такой показатель крутящего момента для обеспечения управления узлом (360) электрической машины с целью по меньшей мере частичной компенсации любых резких изменений крутящего момента, происходящих в приводе (300).
9. Привод (300) по п.8, в котором один или несколько датчиков выполнены в виде датчиков скорости вращения для измерения скорости вращения соответствующего одного или нескольких валов (340, 350, 380), при этом блок (490) управления способен вычислять упомянутый показатель крутящего момента на основании инерционных моментов составных частей привода (300) и на основании углового ускорения, вычисляемого во времени на основании одной или нескольких измеренных скоростей вращения.
10. Гибридный привод (300), содержащий двигатель (310) внутреннего сгорания, узел (360) электрической машины, коробку (500) передач для приема тяговой мощности по меньшей мере от двигателя (310) внутреннего сгорания и(или) узла (360) электрической машины для подачи соответствующей тяговой мощности на нагрузку (530), блок (490) управления, связанный с двигателем (310) внутреннего сгорания, узлом (360) электрической машины и коробкой (500) передач для управления их работой, при этом привод (300) выполнен с возможностью настройки в процессе работы так, чтобы двигатель (310) внутреннего сгорания мог переключаться между нерабочим состоянием и рабочим состоянием, причем для переключения двигателя (310) внутреннего сгорания из нерабочего состояния в рабочее состояние его необходимо запустить, отличающийся тем, что он выполнен с возможностью регулирования в процессе работы передачи двигателю (310) внутреннего сгорания крутящего момента, необходимого для запуска двигателя, таким образом, чтобы она по существу совпадала во времени с включением коробки (500) передач для подачи тяговой мощности на нагрузку (530) привода (300), и при этом один или несколько вращающихся валов (340, 350, 380) двигателя (310) внутреннего сгорания и узел (360) электрической машины снабжены одним или несколькими датчиками для определения показателя крутящего момента, передаваемого двигателю (310) внутреннего сгорания при его запуске и приведении в действие, и имеется возможность обработки этого показателя крутящего момента с использованием имитации крутящего момента привода (300, 1000), выполняемой в процессе работы компьютерным аппаратным обеспечением блока (490) управления с целью управления узлом (360) электрической машины таким образом, чтобы по меньшей мере частично компенсировать любые резкие изменения крутящего момента, происходящие в приводе (300).
11. Привод (300) по п.10, в котором при нахождении коробки передач во включенном положении двигатель (310) внутреннего сгорания может быть запущен путем поддержания состояния вращения узла (360) электрической машины, по меньшей мере частичного соединения двигателя (310) внутреннего сгорания с узлом (360) электрической машины посредством вращательного соединительного механизма (330) для передачи крутящего момента от узла (360) электрической машины двигателю (310) внутреннего сгорания и тем самым разгона двигателя (310) внутреннего сгорания до пороговой скорости вращения и затем подачи топлива в двигатель (310) внутреннего сгорания для перевода его в рабочее состояние.
12. Привод (300) по п.10, в котором один или несколько датчиков выполнены в виде датчиков скорости вращения для измерения скорости вращения соответствующего одного или нескольких валов (340, 350, 380), при этом блок (490) управления способен вычислять упомянутый показатель крутящего момента на основании инерционных моментов составных частей привода (300) и на основании углового ускорения, вычисляемого во времени на основании одной или нескольких измеренных скоростей вращения.
13. Транспортное средство, имеющее гибридный привод (300) по любому из предшествующих пунктов.
14. Транспортное средство по п.13, выбираемое из группы, включающей автобус, грузовой автомобиль, строительное транспортное средство, фургон, пассажирское транспортное средство, катер, судно, стационарную машину или транспортное средство любого типа, от которого в процессе эксплуатации требуется способность относительно быстро разгоняться при частых остановках и трогании с места.
15. Способ управления гибридным приводом (300), содержащим двигатель (310) внутреннего сгорания, узел (360) электрической машины, коробку (500) передач для приема тяговой мощности по меньшей мере от двигателя (310) внутреннего сгорания и(или) узла (360) электрической машины для подачи соответствующей тяговой мощности на нагрузку (530), блок (490) управления, связанный с двигателем (310) внутреннего сгорания, узлом (360) электрической машины и коробкой (500) передач для управления их работой, при этом привод (300) выполнен с возможностью настройки в процессе работы так, чтобы двигатель (310) внутреннего сгорания мог переключаться между нерабочим состоянием и рабочим состоянием, а для переключения двигателя (310) внутреннего сгорания из нерабочего состояния в рабочее состояние его необходимо запустить, отличающийся тем, что он включает шаги, на которых принимают сигналы обратной связи, поступающие от привода (300, 1000), и сигналы управления на множестве входов блока (490) управления и подают выходные сигналы на множество выходов привода (300, 1000) для управления работой привода (300, 1000) и осуществляют в блоке (490) управления имитацию крутящего момента привода (300, 1000), выполняемую компьютерным аппаратным обеспечением блока (490) управления, при этом имитацию используют в процессе работы для обработки информации, поступающей на множество входов, с целью вычисления компенсации, а блок (490) управления способен осуществлять компенсацию на множестве выходов для ослабления амплитуды рывков крутящего момента, происходящих в процессе работы привода (300, 1000), когда двигатель (310) переключают между рабочим и нерабочим состояниями.
16. Способ по п.15, включающий дополнительные шаги, на которых:
а) инициируют переключение передач путем уменьшения крутящего момента, передаваемого коробке (500) передач, и затем переключения коробки (500) передач в нейтральное положение,
б) регулируют передачу двигателю (310) внутреннего сгорания крутящего момента, необходимого для запуска двигателя, таким образом, чтобы она по существу совпадала во времени с нахождением коробки (500) передач в нейтральном положении, при этом крутящий момент, необходимый для запуска двигателя, и подача топлива в двигатель (310) внутреннего сгорания приводят двигатель внутреннего сгорания в действие, и
в) вводят коробку (500) передач в зацепление и затем увеличивают крутящий момент, передаваемый (500) коробке передач.
17. Способ по п.16, включающий дополнительные шаги, на которых:
г) при нахождении коробки (500) передач в нейтральном положении запускают двигатель (310) внутреннего сгорания путем замедления узла (360) электрической машины преимущественно до остановки,
д) по меньшей мере частично соединяют двигатель (310) внутреннего сгорания с узлом (360) электрической машины посредством вращательного соединительного механизма (330),
е) осуществляют возбуждение узла (360) электрической машины с целью ускорения его вращения и тем самым разгона двигателя (310) внутреннего сгорания до пороговой скорости вращения и
ж) осуществляют подачу топлива в двигатель (310) внутреннего сгорания для его перевода в рабочее состояние.
18. Способ по п.17, включающий дополнительные шаги, на которых:
з) при нахождении коробки (500) передач в нейтральном положении запускают двигатель (310) внутреннего сгорания путем поддержания вращательного состояния узла (360) электрической машины,
и) по меньшей мере частично соединяют двигатель (310) внутреннего сгорания с узлом (360) электрической машины посредством вращательного соединительного механизма (330) для передачи крутящего момента от узла (360) электрической машины двигателю (310) внутреннего сгорания и тем самым разгона двигателя (310) внутреннего сгорания до пороговой скорости вращения и
к) подают топливо в двигатель (310) внутреннего сгорания для его перевода в рабочее состояние.
19. Способ по п.18, в котором соединительным механизмом (330) является предохранительная фрикционная муфта (330), способная обеспечивать передачу постоянного крутящего момента по меньшей мере на протяжении части своего диапазона (630) пробуксовки.
20. Способ управления гибридным приводом (300), содержащем двигатель (310) внутреннего сгорания, узел (360) электрической машины, коробку (500) передач для приема тяговой мощности по меньшей мере от двигателя (310) внутреннего сгорания и(или) узла (360) электрической машины для подачи соответствующей тяговой мощности на нагрузку (530), блок (490) управления, связанный с двигателем (310) внутреннего сгорания, узлом (360) электрической машины и коробкой (500) передач для управления их работой, при этом привод (300) выполнен с возможностью настройки в процессе работы так, чтобы двигатель (310) внутреннего сгорания мог переключаться между нерабочим состоянием и рабочим состоянием, а для переключения двигателя (310) внутреннего сгорания из нерабочего состояния в рабочее состояние его необходимо запустить, отличающийся тем, что он включает шаги, на которых:
а) вводят коробку (500) передач в зацепление для передачи через нее крутящего момента с целью подачи тяговой мощности на нагрузку (530) и
б) передают двигателю (310) внутреннего сгорания крутящий момент, необходимый для запуска двигателя, и осуществляют подачу топлива в него с целью приведения в действие, при этом такое приведение в действие двигателя внутреннего сгорания преимущественно совпадает во времени с включением коробки (500) передач,
в) посредством одного или нескольких датчиков, которыми снабжены один или несколько вращающихся валов (340, 350, 380) двигателя (310) внутреннего сгорания и узел (360) электрической машины, определяют показатель крутящего момента, передаваемого двигателю (310) внутреннего сгорания при его запуске и приведении в действие, и обрабатывают такой показатель крутящего момента с использованием имитации крутящего момента привода (300), выполняемой в процессе работы компьютерным аппаратным обеспечением блока (490) управления с целью управления электрической машиной (360) таким образом, чтобы по меньшей мере частично компенсировать любые резкие изменения крутящего момента, происходящие в приводе (300).
21. Способ по п.20, включающий дополнительные шаги, на которых:
г) при нахождении коробки (500) передач в сцепленном положении осуществляют запуск двигателя (310) внутреннего сгорания путем поддержания вращательного состояния узла (360) электрической машины,
д) по меньшей мере частично соединяют двигатель (310) внутреннего сгорания с узлом (360) электрической машины посредством вращательного соединительного механизма (330) для передачи крутящего момента от узла (360) электрической машины двигателю (310) внутреннего сгорания и тем самым разгона двигателя (310) внутреннего сгорания до пороговой скорости вращения и
е) осуществляют подачу топлива в двигатель (310) внутреннего сгорания для перевода его в рабочее состояние.
22. Способ по п.20 или 21, в котором один или несколько датчиков выполнены в виде датчиков скорости вращения для измерения скорости вращения соответствующего одного или нескольких валов (340, 350, 380), причем посредством блока (490) управления вычисляют упомянутый показатель крутящего момента на основании инерционных моментов составных частей привода (300) и на основании углового ускорения, вычисляемого во времени на основании одной или нескольких измеренных скоростей вращения.
23. Блок (490) управления гибридным приводом, включающий в себя компьютерное аппаратное обеспечение, содержащее компьютерную программу, при исполнении которой блоком управления осуществляются действия способа по пп.15-22.
24. Блок (490) управления по п.23, включающий программируемый микрокомпьютер.
25. Блок (490) управления по п.23, имеющий возможность подключения к Интернету.
26. Гибридный привод (300, 1000), содержащий двигатель (310) внутреннего сгорания, узел (360) электрической машины, коробку (500) передач для приема тяговой мощности по меньшей мере от двигателя (310) внутреннего сгорания и(или) узла (360) электрической машины для подачи соответствующей тяговой мощности на нагрузку (530), блок (490) управления, связанный с двигателем (310) внутреннего сгорания, узлом (360) электрической машины и коробкой (500) передач для управления их работой, при этом привод (300) выполнен с возможностью настройки в процессе работы так, чтобы двигатель (310) внутреннего сгорания мог переключаться между нерабочим состоянием и рабочим состоянием, причем для переключения двигателя (310) внутреннего сгорания из нерабочего состояния в рабочее состояние его необходимо запустить, отличающийся тем, что блок (490) управления имеет множество входов для приема сигналов обратной связи, поступающих от привода (300, 1000), и по меньшей мере одного сигнала управления, передаваемого приводу (300, 1000), и множество выходов для вывода выходных сигналов для управления работой привода (300, 1000), и блок (490) управления дополнительно содержит компьютерное аппаратное обеспечение, способное осуществлять имитацию крутящего момента привода (300, 1000), которую используют в процессе работы для обработки информации, поступающей на множество входов, с целью вычисления компенсации, причем упомянутый блок (490) управления способен осуществлять компенсацию по меньшей мере на одном из упомянутого множества выходов для ослабления амплитуды рывков крутящего момента, происходящих в процессе работы привода (300, 1000), когда двигатель (310) переключают между рабочим и нерабочим состояниями.
27. Гибридный привод по п.26, в котором блок (490) управления способен вводить компенсацию в электрическую машину.
28. Способ управления гибридным приводом, содержащим двигатель (310) внутреннего сгорания, узел (360) электрической машины и коробку (500) передач для приема тяговой мощности по меньшей мере от двигателя (310) внутреннего сгорания и(или) узла (360) электрической машины для подачи соответствующей тяговой мощности на нагрузку (530), включающий шаги, которые осуществляют, начиная с рабочего состояния привода, в котором подачу мощности на нагрузку обеспечивают с помощью узла (360) электрической машины, и на которых уменьшают крутящий момент на выходе узла (360) электрической машины, передаваемый коробке передач, переключают коробку (500) передач, запускают двигатель (310) внутреннего сгорания с помощью узла (360) электрической машины, когда входной вал коробки передач соединен с нагрузкой, и передают электрической машине дополнительный крутящий момент, чтобы компенсировать крутящий момент, необходимый для запуска двигателя (310)внутреннего сгорания.
29. Способ по п.28, включающий шаг, на котором крутящий момент на выходе электрической машины уменьшают путем его линейного снижения.
30. Способ по п.28 или 29, включающий шаг, на котором после уменьшения крутящего момента на выходе электрической машины переводят коробку (500) передач в нейтральное положение.
31. Способ по п.30, включающий шаг, на котором после перевода коробки (500) передач в нейтральное положение вводят передачу коробки (500) передач в зацепление.
32. Способ по п.31, включающий шаг, на котором после ввода в зацепление передачи коробки (500) передач плавно увеличивают выходной крутящий момент, передаваемый коробке передач.
33. Способ по п.32, включающий шаг, на котором выходной крутящий момент, передаваемый коробке передач, плавно увеличивают путем плавного увеличения по меньшей мере крутящего момента на выходе двигателя внутреннего сгорания.
34. Способ по п.33, включающий шаг, на котором крутящий момент на выходе двигателя внутреннего сгорания плавно увеличивают путем подачи топлива в двигатель.
35. Способ по п.33 или 34, включающий шаг, на котором до плавного увеличения крутящего момента на выходе двигателя внутреннего сгорания синхронизируют выходные обороты двигателя внутреннего сгорания.
36. Способ по п.34, включающий шаг, на котором при заданной частоте вращения двигателя инициируют подачу топлива в двигатель.
37. Способ по любому из пп.28 и 29, включающий шаг, на котором приводят в действие соединительный механизм (330) между двигателем (310) внутреннего сгорания и узлом (360) электрической машины, чтобы запустить двигатель (310) внутреннего сгорания с помощью электрической машины.
38. Способ по п.37, включающий шаг, на котором поддерживают определенную частоту вращения электрической машины и одновременно частично включают соединительный механизм (330).
39. Способ по п.37, включающий шаг, на котором до запуска двигателя (310) внутреннего сгорания с помощью электрической машины замедляют частоту вращения электрической машины до остановки и полностью включают соединительный механизм (330).
40. Способ по любому из пп.38 и 39, включающий шаг, на котором измеряют выходные обороты электрической машины и выходные обороты двигателя (310) внутреннего сгорания и полностью включают соединительный механизм (330), когда измеренные выходные обороты электрической машины и измеренные выходные обороты двигателя (310) внутреннего сгорания находятся в заданном диапазоне.
41. Способ по любому из пп.28 и 29, включающий шаг, на котором электрической машине передают дополнительный крутящий момент, чтобы компенсировать крутящий момент, необходимый для запуска двигателя (310) внутреннего сгорания.
42. Способ по п.30, включающий шаг, на котором запускают двигатель внутреннего сгорания с помощью электрической машины при нахождении коробки передач в нейтральном положении.
43. Способ по любому из пп.28 и 29, включающий шаг, на котором запускают двигатель внутреннего сгорания с помощью электрической машины при нахождении коробки передач во включенном положении.
44. Способ по любому из пп.28 и 29, включающий шаг, на котором запускают двигатель внутреннего сгорания с помощью электрической машины во время уменьшения крутящего момента на выходе узла (360) электрической машины, передаваемого коробке передач.
45. Способ по п.32, включающий шаг, на котором запускают двигатель внутреннего сгорания с помощью электрической машины во время плавного увеличения выходного крутящего момента, передаваемого коробке передач.
46. Способ по п.35, включающий шаг, на котором запускают двигатель внутреннего сгорания с помощью электрической машины после синхронизации крутящего момента на выходе двигателя внутреннего сгорания.
47. Способ по любому из пп.28 и 29, включающий шаг, на котором запускают двигатель внутреннего сгорания с помощью электрической машины при ее нахождении в рабочем состоянии, которое существенно отличается от рабочего состояния, в котором электрическая машина работает при максимальном крутящем моменте на выходе.
48. Способ по любому из пп.28 и 29, включающий шаг, на котором коробку (500) передач переключают во время упомянутого перехода с подачи мощности на нагрузку с помощью электрической машины на подачу мощности на нагрузку с помощью двигателя внутреннего сгорания.
| US 6176807 B1, 23.01.2001 | |||
| US 5755302 A, 26.05.1998 | |||
| ПРИВОД | 1999 |
|
RU2238193C2 |

