Область техники, к которой относится изобретение
Настоящее изобретение относится к электронному блоку управления (БУ) системой силового привода транспортного средства, которая имеет такой БУ, к управлению такой системой силового привода, к компьютерному программному продукту и запоминающей среде, такой как память компьютера, реализуемой в БУ. Более точно, изобретение относится к управлению системами силового привода гибридных транспортных средств, оснащенных двигателем внутреннего сгорания и электрическим двигателем/генератором.
Уровень техники
В силу стремления создавать транспортные средства, оказывающие меньшее воздействие на окружающую среду во время движения, например, потребляющие меньше топлива и имеющие менее токсичный выхлоп, усиливается интерес к гибридным транспортным средствам, имеющим движительную систему, в которую входит двигатель внутреннего сгорания (ДВС), а также электрический двигатель/генератор (ЭДГ). ДВС и ЭДГ действуют во взаимодополняющем режиме таким образом, что электрический двигатель предпочтительно используется при движении с низкой скоростью, когда часто происходят остановки и трогания с места, например в городских условиях, а ДВС предпочтительно используется, например, при движении с относительно постоянной скоростью, например по автомагистрали.
Одним из недостатков, присущих движительной системе описанного рода, является то, что вся система занимает больше пространства, чем обычные движительные системы, например обычного транспортного средства, оснащенного только ДВС, или транспортного средства только с электрическим приводом. Помимо необходимости оснащения транспортного средства двумя двигательными агрегатами, его также требуется оснащать системой и устройствами эффективного управления двигательными агрегатами и системой силового привода, что предполагает использование дополнительных деталей в транспортном средстве. Следовательно, для расположения блоков силового привода в гибридном транспортном средстве требуется большее пространство и необходима более совершенная система управления, позволяющая использовать выгоды наличия двух отдельных двигательных агрегатов.
Тем не менее, гибридное транспортное средство обладает определенными преимуществами над транспортными средствами обоих упомянутых типов. Транспортное средство только с электрическим приводом, как правило, не способно проходить такие большие расстояния, как обычное транспортное средство с приводом от ДВС в силу ограниченной максимальной аккумулированной энергии, при этом электрический двигатель обычно не является настолько же мощным, как ДВС, и обеспечивает более медленное ускорение и имеет худшие характеристики, когда требуется высокий крутящий момент, например при трогании с места и движении тяжело нагруженного транспортного средства, на крутых подъемах или при необходимости быстрого ускорения, например при обгоне. Соответственно, гибридное транспортное средство не имеет этих недостатков, поскольку в нем при желании может использоваться ДВС. Кроме того, гибридное транспортное средство обладает такими же преимуществами, как электромобиль, когда желательно обеспечить низкий уровень выбросов, и гибридное транспортное средство может приводиться в действие электрическим двигателем, например в условиях повторяющихся троганий с места и остановок или в городских условиях, когда особо желательно снизить уровень токсичных выбросов, таких как окиси азота, окись углерода или твердые частицы. Следовательно, гибридное транспортное средство обеспечивает выгодное снижение расхода органического топлива по сравнению с обычными транспортными средствами, оснащенными двигателями внутреннего сгорания, и обладает более широким рабочим диапазоном и лучшими ходовыми характеристиками, например ускорением и мощностью, чем современные электромобили. С учетом указанных выгод использования двух двигательных агрегатов и общего высокого будущего потенциала гибридных транспортных средств существует потребность в разработке гибридных транспортных средств, несмотря на более высокую сложность и стоимость систем силового привода.
Ряд различных систем силового привода и систем управления силовым приводом описаны, например, в патентах US 5637987, US 68887180, US 7089095 или GB 2359865. Соответственно, эти системы обеспечивают различные решения задачи управления системой гибридного силового привода. Тем не менее, поскольку описанные системы являются довольно сложными, при разработке системы гибридного силового привода и ее функций управления существует общая потребность в создании компактной системы без использования излишне громоздкой и тяжелой конструкции.
Решение задачи создания системы гибридного транспортного средства, которая является компактной и одновременно относительно простой в настройке, предложено, например, в заявке US 2007/0095584, в которой описан гибридный приводной механизм, имеющий одно сцепление. В систему входит двигатель внутреннего сгорания (ДВС), имеющий ведущий вал, посредством сцепления соединенный с валом электрической машины, т.е. электрического двигателя/генератора (ЭДГ). ЭДГ дополнительно соединен с входным валом механической трансмиссии, которая посредством своего выходного вала соединена с дифференциальной передачей, распределяющей движущую силу на колеса с каждой стороны ведомой оси. Тем не менее, одним из возможных недостатков такой компактной системы может являться сложность управления системой силового привода с желаемой точностью.
Соответственно, одной из важных функций гибридной системы является управление двигательными агрегатами и системой силового привода таким образом, чтобы иметь возможность пользоваться преимуществами наличия двух двигательных агрегатов. Одной из основных задач, требующих решения, является способность электрического двигателя к аккумулированию энергии и рекуперация электроэнергии. Существует почти постоянная потребность в генерации электроэнергии и ее аккумулировании в батарее или аналогичном аккумуляторе энергии, поскольку энергоемкость батареи обычно является довольно ограниченной. Таким образом, желательно иметь возможность эффективно управлять двигательными агрегатами, с тем чтобы оптимально использовать двигатель ДВС и ЭДГ и управлять ими в зависимости от состояния заряда (СЗ) батареи или аккумулятора энергии.
Помимо управления системой силового привода с учетом таких особенностей, как эффективность использования топлива, загазованность, например, двуокисью углерода и NOx и регулирование состояния заряда (СЗ) батареи, также желательно поддерживать ходовые характеристики, такие как приемистость, реакция двигателя на управляющие воздействия, плавность переключения передач и т.д. на таком же уровне, как у обычных транспортных средств, т.е. транспортных средств, оснащенных только ДВС. Следовательно, существует потребность в новой и усовершенствованной стратегии управления, которая отвечала бы требованиям обеспечения оптимальной общей характеристики управляемости, энергосберегающего стиля вождения, регулирования СЗ батареи и управления этими желательными свойствами при использовании компактной системы гибридного силового привода.
Раскрытие изобретения
В изобретении предложена система силового привода гибридного транспортного средства, оснащенного двигателем внутреннего сгорания (ДВС), расположенным в системе силового привода (по силовому тракту) до электрического двигателя/генератора (ЭДГ). ДВС может являться двигателем любого желаемого типа, например карбюраторным или дизельным двигателем. ЭДГ также может являться устройством любого желаемого типа, но при этом он должен быть способен действовать, как электрический двигатель, а также как генератор. ДВС соединен с ЭДГ посредством главного сцепления (ГС). Так, примером этого расположения может служить выходной вал ДВС, посредством ГС соединенный с входным валом ЭДГ. ГС может представлять собой фрикционное сцепление, такое как дисковое сцепление, или может представлять собой кулачковую муфту, например зубчатую муфту. Обычно в этом положении желательна кулачковая муфта, поскольку она, как правило, вызывает меньшие потери энергии, чем фрикционное сцепление. В систему силового привода дополнительно входит механическая трансмиссия, имеющая по меньшей мере одно синхронное зубчатое колесо. Механическая трансмиссия расположена после ЭДГ и до конечных исполнительных элементов (колес). В этом контексте считается, что механической трансмиссией являются любые ступенчатые устройства выбора передач или трансмиссии, способные изменять соотношение частот вращения входного вала и выходного вала. Трансмиссией может являться, например, только основная коробка передач или основная коробка передач с одной или несколькими дополнительными коробками передач, как, например, механизмы переключения передач с интервалом между передаточными числами и(или) демультипликаторы, описанные в ЕР 1852635. Система силового привода дополнительно соединена с электронным блоком управления (БУ или ECU) для управления системой силового привода. Таким образом, система силового привода согласно изобретению является автоматической или полуавтоматической системой, принимающей управляющие сигналы от БУ. Изобретение отличается тем, что БУ запрограммирован на выполнение управляющей последовательности, включающей стадии, на которых:
а) переводят систему силового привода в генерирующий режим, когда транспортное средство находится в неподвижном состоянии при работающем ДВС и принят сигнал, указывающий, что желательна генерация электроэнергии. Одним из признаков желательности генерации электроэнергии может являться, например, состояние заряда (СЗ) батареи, показатель времени нахождения в неподвижном состоянии или инициируемый вручную сигнал, указывающий, что желательна генерация электроэнергии. Этот генерирующий режим в неподвижном состоянии или в режиме холостого хода предусматривает включение ГС, в результате чего ЭДГ вращается в генерирующем режиме, а конечные исполнительные элементы отсоединяются за счет использования синхронного зубчатого колеса механической трансмиссии, установленного в нейтральное положение. Управление ДВС и ЭДГ предпочтительно осуществляют таким образом, чтобы ДВС работал оптимальным образом с точки зрения таких особенностей, как (топливная) экономичность и низкое содержание токсичных компонентов в выхлопных газах, при этом частоту вращения ЭДГ предпочтительно оптимизируют с целью эффективной генерации электроэнергии. Обычно это достигается путем регулирования числа оборотов в минуту ДВС и нагрузки на ЭДГ. Хотя между выходным валом ДВС и входным валом ЭДГ можно было бы предусмотреть зубчатое колесо или трансмиссию какого-либо рода, чтобы устанавливать частоту вращения входного вала для оптимальной генерации электроэнергии с желаемой частотой вращения ДВС на холостом ходу при рекуперации электроэнергии, между выходным валом ДВС и входным валом ЭДГ обычно устанавливают передаточное отношение 1:1, например, за счет использования кулачковой муфты, такой как зубчатая муфта во избежание потерь на трение и одновременно для сохранения компактности и простоты системы;
б) начинают переход от холостого режима к режиму движения в ответ на принятый БУ входной сигнал, указывающий, что требуется движение транспортного средства. Этот сигнал может быть, например, инициирован переключением с нейтральной передачи на передачу переднего или заднего хода, нажатием на педаль акселератора или отпусканием рабочего тормоза/стояночного тормоза или любым другим применимым показателем состояния или изменения состояния соответствующего параметра;
в) выключают ГС, в результате чего ДВС и ЭДГ отсоединяются друг от друга. За счет отсоединения ДВС от ЭДГ можно довольно быстро снизить частоту вращения ЭДГ. Кроме того, осуществляется синхронизация упомянутого синхронного зубчатого колеса, которое использовалось для отсоединения конечного исполнительного элемента от ЭДГ и ДВС. За счет синхронизации зубчатого колеса, которое ранее было установлено в нейтральное положение, на конечные исполнительные элементы может передаваться крутящий момент, например, создаваемый силами инерции, и при этом может снижаться частота вращения ЭДГ. Одной из выгод применения этого способа управления является более быстрое трогание с места в ответ на сигнал, указывающий, что требуется движение транспортного средства. Согласно способу управления, описанному в заявке US 2007/0095584, предусмотрен период ожидания с момента, когда указано, что желателен переход от генерирующего режима при нахождении в неподвижном состоянии к движению транспортного средства до переключения с нейтральной передачи на выбранную передачу в связи с ожиданием замедления частоты вращения ЭДГ до нуля или почти до нуля. Этот период ожидания может быть раздражающим для водителя, который привык к немедленной реакции на свои управляющие воздействия. Соответственно, в способе управления согласно настоящему изобретению предусмотрено, что транспортное средство начинает движение быстрее в ответ на соответствующий входной сигнал, указывающий, что требуется движение транспортного средства. Следовательно, процедура синхронизации и синхронное зубчатое колесо будут использоваться для передачи крутящего момента от ЭДГ (предпочтительно сил инерции ЭДГ и соответствующих используемых валов) на конечные исполнительные элементы, например, колеса в случае обычного легкового автомобиля, грузовика или автобуса. Помимо способности использовать энергию, аккумулируемую в системе в форме сил инерции, для обеспечения немедленной реакции на команду начать движение, в способе также выгодно непосредственно используется механическая энергия без необходимости ее преобразования в электрическую энергию до обратного преобразования в механическую энергию или, что еще хуже, прерывания вращения ЭДГ с помощью фрикционного тормоза или аналогичного устройства, в результате чего силы инерции теряются на трение. Соответственно, за счет использования описанной в изобретении стратегии управления может быть повышен общий кпд по энергии. Еще одним преимуществом является то, что замедление вращения ЭДГ при начале движения транспортного средства за счет использования синхронизации также способствует более плавному троганию с места. Таким образом, вращение ЭДГ замедляется за счет тормозящего усилия синхронизации механической трансмиссии, по меньшей мере часть силы инерции ЭДГ передается конечным исполнительным элементам, и транспортное средство плавно начинает движение;
г) после достаточного замедления вращения ЭДГ, в результате чего частота вращения находится в пределах, допускающих осуществление принудительного сцепления синхронного зубчатого колеса, ЭДГ и конечные исполнительные элементы соединяются за счет принудительного сцепления синхронного зубчатого колеса. Соответственно, после этого ЭДГ может начать действовать как двигатель и служить источником энергоснабжения транспортного средства при трогании с места и ускорении.
Разумеется, что описанная система силового привода может действовать в различных гибридных транспортных средствах, например, она применима в транспортном средстве, оснащенном такой системой, как описана в заявке US 2007/0095584. Тем не менее, ее применение может быть наиболее выгодным в транспортных средствах, которые часто трогаются с места и останавливаются, например, в автобусах местного сообщения, почтовых автомобилях или грузовиках для сбора мусора.
В изобретении также предложен способ управления системой силового привода транспортного средства. В систему силового привода входит двигатель внутреннего сгорания (ДВС), расположенный в системе силового привода до электрического двигателя/генератора (ЭДГ). ДВС посредством главного сцепления (ГС) соединен с ЭДГ. В систему силового привода дополнительно входит механическая трансмиссия (МТ), имеющая по меньшей мере одно синхронное зубчатое колесо. Механическая трансмиссия расположена после ЭДГ и до конечных исполнительных элементов, например колес. Система силового привода дополнительно соединена с электронным блоком управления (БУ) для управления системой силового привода. Способ управления системой силового привода включает стадии, на которых:
а) переводят систему силового привода в генерирующий режим, когда транспортное средство находится в неподвижном состоянии или режиме холостого хода при работающем ДВС и включенном ГС, в результате чего ЭДГ вращается в генерирующем режиме, а конечные исполнительные элементы отсоединены за счет использования синхронного зубчатого колеса, установленного в нейтральное положение,
б) формируют управляющую последовательность для перехода от режима холостого хода к режиму движения в ответ на принятый БУ сигнал, указывающий, что требуется движение транспортного средства. Сигнал, указывающий, что требуется движение транспортного средства, может быть принят БУ или вычислен БУ исходя из измеренных состояний системы силового привода и(или) параметров, касающихся условий движения и состояния транспортного средства в целом,
в) выключают ГС, в результате чего ДВС и ЭДГ отсоединяются друг от друга, и осуществляют синхронизацию упомянутого синхронного зубчатого колеса, которое использовалось для отсоединения конечного исполнительного элемента от ЭДГ и ДВС, чтобы передать крутящий момент от вращающегося ЭДГ и соответствующих осей на конечные исполнительные элементы по мере замедления вращения ЭДГ. ГС предпочтительно выключают до синхронизации зубчатого колеса во избежание износа ГС и(или) синхронного зубчатого колеса. Тем не менее, эти операции могут незначительно накладываться друг на друга, если размеры ГС и синхронного зубчатого колеса синхронизации рассчитаны на такую стратегию управления, и желательно ускорить процедуру и быстрее осуществить переход,
г) осуществляют принудительное сцепление синхронного зубчатого колеса, когда частота вращения ЭДГ и вала, соединенного с конечными исполнительными элементами, находится в пределах, допускающих осуществление сцепления.
Разумеется, что по завершении этой стадии транспортное средство можно снова перевести на привод от ДВС путем соединения выходного вала ДВС с входным валом ЭДГ за счет включения главного сцепления при условии, что частота вращения ЭДГ находится в пределах, в которых ДВС может быть соединен с ЭДГ.
Для управления ускорением транспортного средства важно выбирать передачу таким образом, чтобы обеспечивать желаемое передаточное отношение. Обычно в начале движения в генерирующем режиме при нахождении в неподвижном состоянии следует выбирать низкую или в большинстве случаев низшую передачу. Выбор соответствующей передачи при трогании с места в целом преимущественно соответствует схеме переключения передач, которая используется при трогании с места гибридного транспортного средства с использованием его ЭДГ в качестве источника энергоснабжения, или пределы схемы переключения передач могут быть незначительно изменены для перехода на повышающую передачу для трогания с места на более высокой передаче за счет дополнительного усилия трогания с места, которое обеспечивается силами инерции, создаваемыми ЭДГ.
Еще одной важной для ускоряющей силы особенностью является давление, с которым вилка переключения передач прижимается к конусу синхронизатора. С одной стороны, разумеется, желательно использовать высокое давление, чтобы обеспечить быструю реакцию на команду начала движения транспортного средства. С другой стороны, давление вилки на синхронизатор не должно быть слишком высоким во избежание прерывистого или резкого трогания с места, что может создавать неудобства для водителей или пассажиров, при этом такое резкое трогание с места также может приводить к износу системы силового привода вследствие значительных сил противодействия при трогании с места. Кроме того, следует учитывать износ синхронизатора и поверхностей конусов с тем, чтобы синхронизатор не изнашивался слишком быстро. Разумеется, что при наличии в механической трансмиссии нескольких синхронизаторов могут использоваться различные синхронизаторы во избежание слишком быстрого износа одного синхронизатора.
Дополнительные варианты осуществления изобретения раскрыты в зависимых пунктах формулы изобретения.
Краткое описание чертежей
Ниже изобретение более подробно рассмотрено со ссылкой на прилагаемые чертежи, на которых показано:
фиг.1 - транспортное средство, имеющее систему силового привода согласно изобретению,
фиг.2 - механическая трансмиссия, применимая в настоящем изобретении,
фиг.3 - устройство управления согласно одному из вариантов осуществления изобретения.
Осуществление изобретения
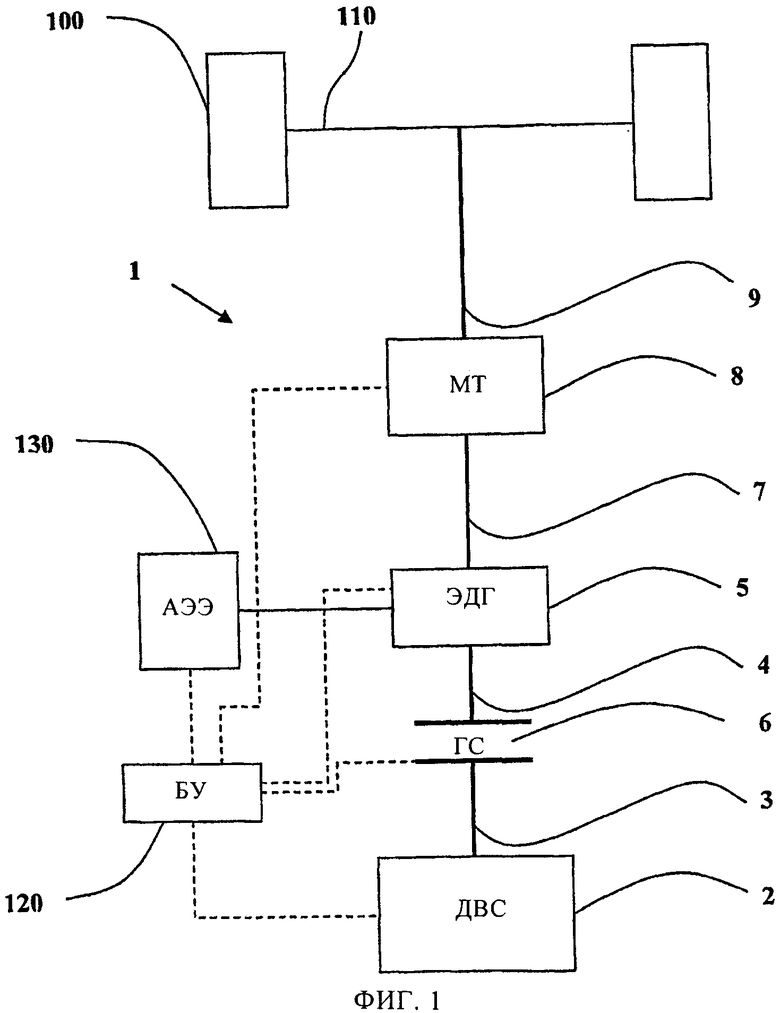
На фиг.1 показано транспортное средство, имеющее систему 1 силового привода согласно изобретению. В систему входит двигатель 2 внутреннего сгорания (ДВС), имеющий выходной вал 3, соединенный с входным валом 4 электрического двигателя/генератора (ЭДГ) 5. Выходной вал 3 и входной вал 4 соединены посредством главного сцепления (ГС) 6. ЭДГ 5 дополнительно имеет выходной вал 7, соединенный с механической трансмиссией (МТ) 8. МТ 8 дополнительно имеет выходной вал 9, который посредством ведомой оси 110 соединен с ведущими колесами 100 транспортного средства. Системой управляет электронный блок 120 управления (БУ), который соединен с ДВС 2, ЭДГ 5, ГС 6 и МТ 8. ЭДГ 5 также соединен с аккумулятором электроэнергии (АЭЭ) 130, в котором может накапливаться электроэнергия, когда ЭДГ 5 используется в качестве генератора, и который используется в качестве источника энергии для ЭДГ 5, когда он используется в качестве двигателя.
В соответствии с изобретением БУ 120 запрограммирован на выполнение конкретной управляющей последовательности, которая должна использоваться для перехода между режимом движения гибридного транспортного средства и рекуперацией в режиме холостого хода. БУ 120 может быть запрограммирован на распознавание определенных условий, касающихся состояния системы, например состояния заряда (СЗ) АЭЭ 130 или условий движения, например большого количества кратковременных остановок и троганий с места, или на прием других управляющих сигналов, например нажатия вручную на кнопку, чтобы указать, что желательна генерация. Как указано выше, предложенная стратегия генерации направлена на генерацию электроэнергии в неподвижном состоянии или в режиме холостого хода. Для обеспечения описанной функции предпочтительно предусмотрен датчик, указывающий, что транспортное средство находится в неподвижном состоянии (или состоянии, близком к неподвижному состоянию) или в режиме холостого хода до начала выполнения управляющей последовательности генерации электроэнергии.
Тем не менее, если БУ 120 принимает решение об генерации в режиме холостого хода, БУ дает команду включить ГС 6, в результате чего ЭДГ 5 вращается в генерирующем режиме, а конечные исполнительные элементы, т.е. колеса 100, отсоединяются за счет использования МТ 8, которая установлена в нейтральное положение. Любое зубчатое колесо МТ 8 может быть установлено в нейтральное положение, чтобы на колеса 100 не подавался крутящий момент. Тем не менее, чтобы иметь возможность использовать преимущества стратегии управления, зубчатым колесом, которое переводится из нейтрального положения во включенное положение, чтобы прекратить режим генерации и начать режим движения транспортного средства, должно являться синхронное зубчатое колесо. Переход от генерации в неподвижном состоянии или режиме холостого хода к режиму движения осуществляется в ответ на входной сигнал или управляющую команду, вычисленную на основании поступающих в БУ 120 входных сигналов, соответствующих состоянию параметров системы 1 силового привода или, например, АЭЭ 130. Если установлено, что желательно начать движение транспортного средства, ДВС 2 и ЭДГ 5 отсоединяют друг от друга путем выключения ГС 6. Когда ДВС 2 и ЭДГ 5 отсоединены друг от друга, начинается синхронизация синхронного зубчатого колеса МТ 8, которое использовалось для отсоединения колес 100 от ЭДГ 5 (и ДВС 2), для передачи крутящего момента от ЭДГ и соответствующих валов, например силы инерции системы, на конечные исполнительные элементы. Согласно одной из альтернатив стратегии управления выключение главного сцепления 6 и синхронизация могут накладываться друг на друга, в результате чего синхронизация начинается до выключения ГС 6, или в случае сцепления с бесступенчатым регулированием, такого как дисковое сцепление, до полного выключения сцепления. На этом этапе в ЭДГ 5 предпочтительно не подается мощность и генерация электроэнергии предпочтительно также прекращена, в результате чего вращение ЭДГ 5 замедляется вследствие синхронизации с механической трансмиссией и колесами и транспортное средство плавно начинает движение. Когда частота вращения вала синхронного зубчатого колеса, соединенного со стороной ЭДГ 5, близка к частоте вращения синхронного зубчатого колеса, соединенного со стороной колес 100, а частота вращения с обеих сторон синхронного зубчатого колеса находится в желаемом диапазоне, осуществляется принудительное сцепление синхронного зубчатого колеса.
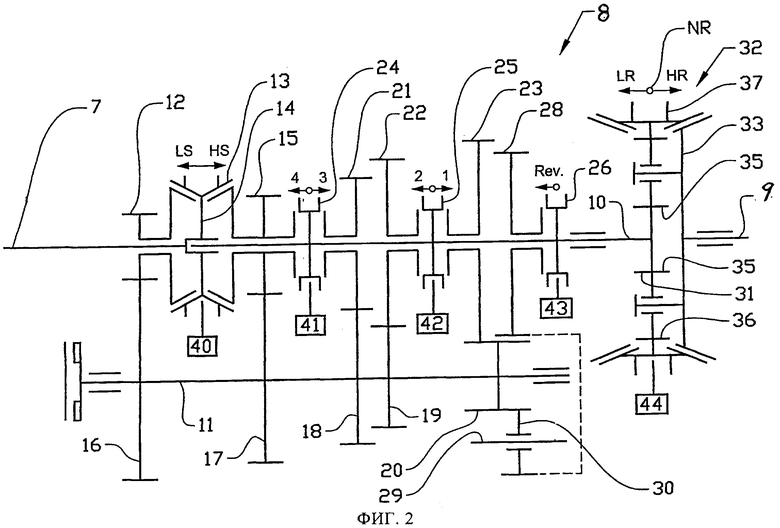
На фиг.2 показана механическая трансмиссия (МТ) 8, применимая в настоящем изобретении. На входном валу 7, т.е. на выходном валу 7 со стороны ЭДГ на фиг.1, с возможностью вращения установлено зубчатое колесо 12, которое может быть зафиксировано на валу с помощью захватной втулки 13, снабженной средством синхронизации и без возможности вращения, но с возможностью перемещения в осевом направлении, установленной на ступице 14, без возможности вращения соединенной с входным валом 7. Зубчатое колесо 15 с возможностью вращения установленное на главном валу 10, также может фиксироваться относительно входного вала 7 с помощью захватной втулки 13. Зубчатые колеса 12 и 15 входят в зацепление с зубчатыми колесами 16 и 17 соответственно, которые без возможности вращения соединены с промежуточным валом 11. На промежуточном валу 11 без возможности вращения установлены дополнительные зубчатые колеса 18, 19 и 20, которые входят в зацепление с зубчатыми колесами 21, 22 и 23 соответственно, с возможностью вращения установленными на главном валу 10 и фиксируемыми на главном валу с помощью захватных втулок 24 и 25 соответственно, которые в проиллюстрированном варианте осуществления не имеют средств синхронизации. Тем не менее, эти втулки при желании также могут быть снабжены средством синхронизации. На главном валу 10 с возможностью вращения установлено дополнительное зубчатое колесо 28, которое входит в зацепление с промежуточным зубчатым колесом 30, которое с возможностью вращения установлено на отдельном валу 29 и в свою очередь входит в зацепление с зубчатым колесом 20 промежуточного вала. Зубчатое колесо 28 может фиксироваться на своем валу с помощью захватной втулки 26.
Пары зубчатых колес 12, 16 и 15, 17, а также захватная втулка 13 образуют систему передач с интервалом между передаточными числами, имеющую низшую ступень LS и высшую ступень HS. Пара зубчатых колес 15, 17 вместе с парами зубчатых колес 21, 18, 22, 19, 23, 20 и 28, 30 также образует основную коробку передач с четырьмя передачами переднего хода и одной передачей заднего хода. На выходном конце главного вала без возможности вращения установлено зубчатое колесо 31, которое образует центральную шестерню двухступенчатого демультипликатора планетарного типа, обозначенного позицией 32, водило 33 планетарной передачи которого без возможности вращения соединено с валом 34, образующим выходной вал коробки передач. Планетарные шестерни 35 демультипликатора 32 входят в зацепление с кольцевым зубчатым колесом 36, которое может с помощью захватной втулки 37 фиксироваться относительно кожуха коробки передач для обеспечения диапазона низших передач LR и относительно водила 33 планетарной передачи для обеспечения диапазона высших передач HR. Захватная втулка также имеет нейтральное положение NR между положениями LR и HR. В нейтральном положении NR выходной вал 34 отсоединен от главного вала 10.
Захватные втулки 13, 24, 25, 26 и 37 способны перемещаться, как показано стрелками на фиг.2, обеспечивая ступени, показанные рядом со стрелками. Перемещение осуществляется сервомеханизмами 40, 41, 42, 43 и 44, которые схематически представлены на фиг.2 и могут представлять собой цилиндропоршневые механизмы с пневматическим приводом того типа, которые используются в коробке передач описанного выше типа. Сервомеханизмами управляет содержащий микрокомпьютер электронный блок 120 управления (фиг 1) в зависимости от поступающих в блок управления сигналов, отображающих различные данные двигателя и транспортного средства, такие как, например, частота вращения двигателя, скорость транспортного средства, положение педали газа, включение/выключение тормоза двигателя, состояние заряда (СЗ), и указывающих, желательно ли ручное переключение или переключение с автоматическим управлением. Блок 120 управления также может регулировать впрыскивание топлива, иными словами, частоту вращения двигателя в зависимости от положения педали газа и от того, включено или выключено сцепление 6.
Проиллюстрированная на фиг.2 механическая трансмиссия 8 служит лишь одним из примеров системы передач, применимой в настоящем изобретении. Проиллюстрированная на фиг.2 система может быть модифицирована, например, в том, что касается числа и расположения синхронизаторов, в результате чего синхронное зубчатое колесо, используемое для синхронизации в настоящем изобретении, может быть расположено в основной коробке передач или в системе передач с интервалом между передаточными числами или в демультипликаторе.
В настоящем изобретении также предложена компьютерная программа и компьютерный программный продукт для использования в компьютере с целью выполнения описанного способа, при этом на фиг.3 проиллюстрирована реализация изобретения с применением компьютера.
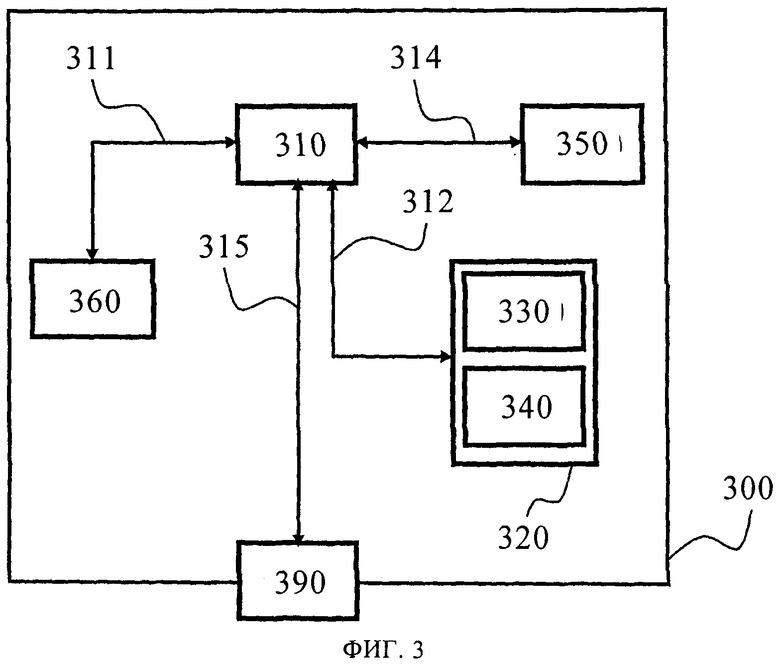
На фиг.3 показано устройство 300 управления согласно одному из вариантов осуществления изобретения, содержащее энергонезависимую память 320, процессор 310 и память 360 с оперативной записью и считыванием. Память 320 имеет первую область 330, в которой хранится компьютерная программа для управления устройством 300. Компьютерной программой для управления устройством 300, хранящейся в области 330 памяти, может являться операционная система.
Устройство 300 может помещаться, например, в блоке управления, таком как блок 120 управления. Блоком 310 обработки данных может являться, например, микрокомпьютер.
Память 320 также имеет вторую область 340, в которой хранится программа управления системой силового привода согласно изобретению. В одном из альтернативных вариантов осуществления программа управления системой силового привода хранится в отдельной энергонезависимой запоминающей среде (средстве) 350, такой как, например, компакт-диск или полупроводниковая память со сменными дисками. Программа может храниться в выполнимой форме или в сжатом виде.
Когда далее указано, что блок 310 обработки данных выполняет конкретную функцию, должно быть ясно, что блок 310 обработки данных выполняет конкретную часть программы, хранящейся в памяти 340, или конкретную часть программы, хранящейся в энергонезависимой среде 350 для записи.
Блок 310 обработки данных рассчитан на обмен данными с памятью 350 посредством шины 314 данных. Блок 310 обработки данных также рассчитан на обмен данными с памятью 320 посредством шины 312 данных. Кроме того, блок 310 обработки данных рассчитан на обмен данными с памятью 360 посредством шины 311 данных. Блок 310 обработки данных также рассчитан на обмен данными с портом 390 данных путем использования шины 315 данных.
Предложенный в настоящем изобретении способ может быть осуществлен блоком 310 обработки данных, который выполняет программу, хранящуюся в памяти 340, или программу, хранящуюся в энергонезависимой среде 350 для записи.
Изобретение не следует считать ограниченным описанными выше вариантами осуществления и предполагается ряд дополнительных вариантов и усовершенствований, входящих в объем следующей далее формулы изобретения. Соответственно, описанная логическая система является лишь одним из примеров возможной реализации системы управления силовым приводом в транспортном средстве, и для специалистов в данной области техники ясно, что существует ряд других возможностей реализации изобретения в транспортном средстве, не выходящих за пределы изобретательского замысла настоящей заявки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ СИЛОВОЙ ПЕРЕДАЧЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2488729C2 |
| КОМБИНИРОВАННАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2009 |
|
RU2424919C1 |
| СПОСОБ И УСТРОЙСТВО ВЫБОРА ПЕРЕДАЧИ ДЛЯ ТРОГАНИЯ С МЕСТА ГИБРИДНОГО ЭЛЕКТРОМОБИЛЯ | 2008 |
|
RU2496039C2 |
| Вально-планетарная гибридная трансмиссия | 2022 |
|
RU2805899C1 |
| ЭЛЕКТРОННЫЙ МОДУЛЬ УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА РЕГУЛИРУЕМЫХ ФАЗ ГАЗОРАСПРЕДЕЛЕНИЯ (ВАРИАНТЫ), УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, СПОСОБ УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА РЕГУЛИРУЕМЫХ ФАЗ ГАЗОРАСПРЕДЕЛЕНИЯ (ВАРИАНТЫ), СПОСОБ УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ (ВАРИАНТЫ) | 2008 |
|
RU2429361C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГЕНЕРИРОВАНИЕМ МОЩНОСТИ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2670557C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРОГАНИЕМ С МЕСТА ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2657587C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2632390C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С КОМБИНИРОВАННОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ РАСШИРЕННЫХ ФУНКЦИОНАЛЬНЫХ ВОЗМОЖНОСТЕЙ | 2011 |
|
RU2473432C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2657544C1 |
Группа изобретений относится к системе силового привода гибридного транспортного средства, электронному блоку управления и способу управления системой силового привода. Система силового привода содержит механическую трансмиссию, снабженную синхронным зубчатым колесом, двигатель внутреннего сгорания (ДВС), электрический двигатель/генератор (ЭДГ), электронный блок управления (БУ). Способ управления включает перевод системы силового привода в генерирующий режим, формирование управляющей последовательности для перехода от режима холостого хода к режиму движения, выключение главного сцепления (ГС), принудительное сцепление синхронного зубчатого колеса. Генерирующий режим предусматривает включение ГС, в результате чего ЭДГ вращается в генерирующем режиме. При выключении ГС ДВС и ЭДГ отсоединяются друг от друга и осуществляется синхронизация синхронного зубчатого колеса. Электронный блок управления обеспечивает управление силовым приводом в соответствии с операциями вышеуказанного способа. Технический результат заключается в повышении эффективности силового привода гибридного транспортного средства. 3 н. и 2 з.п. ф-лы, 3 ил.
1. Система (1) силового привода гибридного транспортного средства, оснащенного двигателем (2) внутреннего сгорания (ДВС), который расположен в системе (1) силового привода до электрического двигателя/генератора (ЭДГ) (5) и соединен с ЭДГ (5) посредством главного сцепления (ГС) (6), при этом система (1) силового привода дополнительно содержит механическую трансмиссию (8), снабженную по меньшей мере одним синхронным зубчатым колесом с принудительным сцеплением и расположенную после ЭДГ (5) и до конечных исполнительных элементов (100), и дополнительно соединена с электронным блоком (120) управления (БУ) для управления системой силового привода, отличающаяся тем, что БУ (120) запрограммирован на выполнение управляющей последовательности шагов, включающих:
а) перевод системы (1) силового привода в генерирующий режим, когда транспортное средство находится в неподвижном состоянии при работающем ДВС (2) и принят сигнал, указывающий, что желательна генерация электроэнергии, при этом генерирующий режим предусматривает включение ГС (6), в результате чего ЭДГ (5) вращается в генерирующем режиме, а конечные исполнительные элементы (100) отсоединяются за счет использования механической трансмиссии (8), установленной в нейтральное положение,
б) формирование управляющей последовательности для перехода от режима холостого хода к режиму движения в ответ на принятый БУ (120) сигнал, указывающий, что требуется движение транспортного средства,
в) выключение ГС (6), в результате чего ДВС (2) и ЭДГ (5) отсоединяются друг от друга, и осуществляется синхронизация синхронного зубчатого колеса, которое использовалось для отсоединения конечного исполнительного элемента (100) от ЭДГ (5) и ДВС (2), для передачи крутящего момента от ЭДГ (5) и соответствующих вращающихся осей на конечные исполнительные элементы (100) по мере замедления вращения ЭДГ (5) вследствие сцепления с механической трансмиссией (8) и конечными исполнительными элементами (100),
г) принудительное сцепление синхронного зубчатого колеса, когда частота вращения ЭДГ (5) и вала, соединенного с конечными исполнительными элементами, находится в пределах, допускающих осуществление сцепления.
2. Система (1) силового привода по п.1, отличающаяся тем, что главным сцеплением (6) является кулачковая муфта, например зубчатая муфта.
3. Силовой привод по любому из предыдущих пунктов, отличающийся тем, что механическая трансмиссия (8) имеет систему передач (12, 13, 15, 16, 17) с интервалом между передаточными числами, основную коробку передач (18-13, 28, 30) и демультипликатор (32-37), по меньшей одно из которых содержит синхронизатор.
4. Электронный блок управления (120) для управления системой (1) силового привода гибридного транспортного средства, в которую входит двигатель (2) внутреннего сгорания (ДВС), расположенный в системе (1) силового привода до электрического двигателя/генератора (ЭДГ) (5) и соединенный с ЭДГ (5) посредством главного сцепления (ГС) (6), при этом система (1) силового привода дополнительно содержит механическую трансмиссию (8), имеющую по меньшей мере одно синхронное зубчатое колесо с принудительным сцеплением и расположенную после ЭДГ (5) и до конечных исполнительных элементов (100), и дополнительно соединена с электронным блоком управления (БУ), отличающийся тем, что он запрограммирован на выполнение управляющей последовательности шагов, включающих:
а) перевод системы (1) силового привода в генерирующий режим, когда транспортное средство находится в неподвижном состоянии при работающем ДВС (2) и принят сигнал, указывающий, что желательна генерация электроэнергии, при этом генерирующий режим предусматривает включение ГС (6), в результате чего ЭДГ (5) вращается в генерирующем режиме, а конечные исполнительные элементы (100) отсоединяются за счет использования механической трансмиссии (8), установленной в нейтральное положение,
б) формирование управляющей последовательности для перехода от режима холостого хода к режиму движения в ответ на принятый БУ (120) сигнал, указывающий, что требуется движение транспортного средства,
в) выключение ГС (6), в результате чего ДВС (2) и ЭДГ (5) отсоединяются друг от друга, и осуществляется синхронизация синхронного зубчатого колеса, которое использовалось для отсоединения конечного исполнительного элемента (100) от ЭДГ (5) и ДВС (2), для передачи крутящего момента от ЭДГ (5) и соответствующих вращающихся осей на конечные исполнительные элементы (100) по мере замедления вращения ЭДГ вследствие сцепления с механической трансмиссией (8) и конечными исполнительными элементами (100),
г) принудительное сцепление синхронного зубчатого колеса, когда частота вращения ЭДГ (5) и вала, соединенного с конечными исполнительными элементами, находится в пределах, допускающих осуществление сцепления.
5. Способ управления системой (1) силового привода транспортного средства, в которую входит двигатель внутреннего сгорания (ДВС), расположенный в системе силового привода до электрического двигателя/генератора (ЭДГ) и соединенный с ЭДГ посредством главного сцепления (ГС), при этом система силового привода дополнительно содержит механическую трансмиссию, имеющую по меньшей мере одно синхронное зубчатое колесо с принудительным сцеплением и расположенную после ЭДГ и до конечных исполнительных элементов, и дополнительно соединена с электронным блоком управления (БУ) для управления системой силового привода, отличающийся тем, что он включает:
а) перевод системы (1) силового привода в генерирующий режим, когда транспортное средство находится в неподвижном состоянии при работающем ДВС (2) и принят сигнал, указывающий, что желательна генерация электроэнергии, при этом генерирующий режим предусматривает включение ГС (6), в результате чего ЭДГ (5) вращается в генерирующем режиме, а конечные исполнительные элементы (100) отсоединяются за счет использования механической трансмиссии (8), установленной в нейтральное положение,
б) формирование управляющей последовательности для перехода от режима холостого хода к режиму движения в ответ на принятый БУ (120) сигнал, указывающий, что требуется движение транспортного средства,
в) выключение ГС (6), в результате чего ДВС (2) и ЭДГ (5) отсоединяются друг от друга, и осуществляется синхронизация синхронного зубчатого колеса, которое использовалось для отсоединения конечного исполнительного элемента (100) от ЭДГ (5) и ДВС (2), для передачи крутящего момента от ЭДГ (5) и соответствующих вращающихся осей на конечные исполнительные элементы (100) по мере замедления вращения ЭДГ вследствие сцепления с механической трансмиссией (8) и конечными исполнительными элементами (100),
г) принудительное сцепление синхронного зубчатого колеса, когда частота вращения ЭДГ (5) и вала, соединенного с конечными исполнительными элементами, находится в пределах, допускающих осуществление сцепления.
| ПРИВОД | 1999 |
|
RU2238193C2 |
| КОМБИНИРОВАННАЯ ЭНЕРГОСИСТЕМА ДЛЯ ДИФФЕРЕНЦИАЛЬНОГО РАСПРЕДЕЛЕНИЯ МОЩНОСТИ | 1996 |
|
RU2171185C2 |
| СИЛОВОЙ АГРЕГАТ ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1998 |
|
RU2221161C2 |
| US 2006199696 A, 07.09.2006. | |||

