ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данная заявка относится к беспроводной связи.
УРОВЕНЬ ТЕХНИКИ
Проект партнерства производителей (сотовой связи) 3-го поколения (3GPP) недавно инициировал программу долгосрочного развития (LTE) для внесения новой технологии, новой архитектуры и конфигураций сетей и новых приложений и услуг в беспроводные сотовые сети для обеспечения улучшенной спектральной эффективности, уменьшенного времени ожидания, более быстрых опытов пользователей и более богатых приложений и услуг более низкой стоимости. LTE нацелено на реализацию универсальной наземной сети радиодоступа (UTRAN). Эта концепция применяется к LTE и также применяется ко всем другим системам универсальной мобильной телекоммуникационной системы (UMTS), подобным выпуску 99, высокоскоростному пакетному доступу нисходящей линии связи (HSDPA), высокоскоростному пакетному доступу восходящей линии связи (HSUPA), модернизациям высокоскоростного пакетного доступа (HSPA) или любым другим выпускам.
В UMTS системе, когда блок беспроводной передачи/приема (WTRU) расположен на некоторой соте, этот WTRU регулярно осуществляет поиск более хорошей соты согласно некоторому множеству критериев. Если более хорошая сота найдена, то эта сота выбирается. В более ранних UMTS системах повторный выбор сот может выполняться, когда WTRU находится в одном из состояния ожидания, состояния канала прямого доступа (FACH) к соте управления радиоресурсами (RRC) и состояния пейджингового (страничного) канала (PCH) соты управления радиоресурсами (RRC). В LTE с только двумя состояниями, LTE_idle (холостое) и LTE_active (активное), WTRU может выполнять повторный выбор соты только в состоянии LTE_idle.
Повторный выбор и хэндовер являются очень разными механизмами. Повторный выбор выполняется посредством WTRU в состоянии RRC_idle. Хэндовер выполняется посредством WTRU в состоянии RRC_connected (подключенном к управлению радиоресурсами). Повторный выбор осуществляется автономно (т.е. на основе некоторых параметров, переданных сетью). Хэндовер управляется и направляется сетью.
В предыдущих UMTS системах, перед тем как WTRU решает расположиться на некоторой соте, ему необходимо проверить некоторые базовые критерии для соты, на которой он располагается. По существу, необходимо, чтобы были выполнены условия для метрики сигнала качества Squal>0 и метрики уровня принимаемого сигнала Srxlev>0 для расположения WTRU на некоторой соте, где Squal и Srxlev измеряются следующим образом:

где Ес - мощность канального кода соты, а I0 - общие помехи в соте. Таким образом, Ес/I0 - безразмерное отношение средней мощности канала (т.е. пилотного канала) к общей мощности сигнала и измеряется посредством WTRU. Qqualmin является минимально необходимой мерой качества, основанной на Ес/I0. Qqualmin выделяется из информационного блока системы 3 (SIB3), который передается системой, и

где мощность кода принимаемого сигнала (RSCP) измеряется посредством WTRU, а Qrxlevmin и WTRU_TXPWR_MAX_RACH передаются в SIB 3. Qqualmin является минимально необходимой мерой качества, основанной на Ес/I0, Qrxlevmin является минимально необходимой мерой качества, основанной на RSCP, а WTRU_TXPWR_MAX_RACH является максимально допустимой мощность передачи (TX) восходящей линии связи канала случайного доступа (RACH).
Хотя в предыдущих UMTS версиях величиной измерения было Ec/I0 или RSCP, в LTE величина измерения еще не определена. Эталонная мощность принятого символа (RSCP) является LTE измерением, которое аналогично RSCP. Эталонное качество принятого символа (RSRQ) также является LTE измерением, которое аналогично Ec/I0.
В дополнение к Qqualmin, Qrxlevmin и WTRU_TXPWR_MAX_RACH, следующие другие параметры передаются в SIB 3 для повторного выбора сот:
1) Sintrasrch (необязательный): WTRU измеряет внутричастотные соседние соты, когда Squal, заданное Уравнением (1), меньше или равно Sintrasrch. Если Sintrasrch не определено сетью, то WTRU всегда измеряет внутричастотные соседние соты.
2) Sintersrch (необязательный): WTRU измеряет межчастотные соседние соты, когда Squal, заданное уравнением (1), меньше или равно Sintersrch. Если Sintersrch не определено сетью, то WTRU всегда измеряет межчастотные соседние соты.
3) SsearchRAT (необязательный): WTRU измеряет inter-RAT соседние соты, когда Squal, заданное уравнением (1), меньше или равно SsearchRAT. Если SsearchRAT не определено сетью, то WTRU всегда измеряет inter-RAT соседние соты. Всегда измеряет inter-RAT соседние соты, когда не определено.
4) Qhyst1s: Это значение запаздывания, добавляемое к качеству сигнала обслуживающей соты (измеряемому посредством RSCP) для увеличения ранга обслуживающей соты.
5) Qhyst2s: Это значение запаздывания, добавляемое к качеству сигнала обслуживающей соты (измеряемому посредством Ec/I0) для увеличения ранга обслуживающей соты.
6) Tresel: Время, за которое соседняя сота должна удовлетворить критериям повторного выбора сот перед тем, как WTRU повторно выбирает соседнюю соту.
Следующее представляет собой некоторые из важных параметров, передаваемых в SIB 11.
Список соседних сот (NCL).
Qoffset1s: Сдвиг качества, используемый для ранжирования обслуживающей соты на основе RSCP.
Qoffset2s: Сдвиг качества, используемый для ранжирования обслуживающей соты на основе Ec/I0.
WTRU_TXPWR_MAX_RACH: Максимально допустимая UL TX мощность для соседней соты.
Qqualmin: Минимально необходимая мера качества на основе Ec/I0.
Qrxlevmin: Минимально необходимая мера качества на основе RSCP.
С использованием этих параметров WTRU может ранжировать свои обслуживающие и соседние соты. Ранжирование обслуживающей соты задается следующим образом:

Передаваемое значение Qoffmbms является сдвигом, добавляемым к тем сотам (обслуживающим или соседним), которые принадлежат к предпочтительному уровню мультимедийной передачи/ мультимедийного обслуживания (MBMS PL).
Как упоминалось выше, Qhyst2s является статическим параметром, указываемым сетью WTRU в SIB 3 в современных UMTS системах для ранжирования обслуживающей соты.
Ранжирование соседней соты задается следующим образом:

Уравнение ранжирования, подобное уравнению (4), может быть применено, когда величиной измерения является RSCP. Для конкретной соты, подлежащей повторному выбору, ранжирование соседней соты должно быть выше ранжирования обслуживающей соты для периода, равного Tresel. Даже если ранжирование обслуживающей соты резко падает, ни ранжирование, ни значение Tresel таймера повторного выбора не модифицируется для повторного выбора соседней соты с большей скоростью.
Может быть реализован коэффициент масштабируемости для состояния высокой мобильности (т.е. WTRU движется с высокой скоростью), отличающийся от критериев повторного выбора. Соответственно, когда число повторных выборов сот, которое имеет место в течение конкретного периода времени TCRmax, превышает значение NCR, было детектировано состояние высокой мобильности. При детектировании состояния высокой мобильности значение таймера Tresel повторного выбора умножается на коэффициент масштабируемости, если этот коэффициент масштабируемости передан сетью в качестве необязательного параметра в SIB 3, в зависимости от того, реализуется ли внутричастотный или межчастотный выбор, или inter-RAT выбор.
Существует много сценариев, при которых вышеупомянутое условие мобильности не было бы эффективным. Например, WTRU может постепенно затухать от обслуживающей соты, и не в сценарии мобильности. В этом случае WTRU может быть не в состоянии поддерживать вызов, и он нуждался бы в более резком повторном выборе соседней соты для предотвращения его выхода из обслуживания в состоянии ожидания или предотвращения потери WTRU данных в других состояниях, таких как FACH состояние.
Альтернативно, WTRU мог бы находиться в сценарии высокой мобильности, но через единственную большую соту, так что он, возможно, не удовлетворяет существующим критериям повторных выборов сот. Обслуживающая сота могла бы резко падать в этом случае, и опять WTRU нуждался бы в быстром повторном выборе соседней соты.
Альтернативно, WTRU может затратить большое время для повторного выбора соты из-за затраты расширенного периода времени для чтения SIB, или WTRU может выйти из обслуживания между повторными выборами сот, т.к. качество сигнала обслуживающей соты резко падает прежде, чем WTRU мог бы повторно выбрать другую соту, и в этом случае WTRU может даже не удовлетворять критериям высокой мобильности.
Когда WTRU находится в активном состоянии, он нуждается в осуществлении хэндовера к соседней соте. В UMTS системе это мог бы быть либо мягкий хэндовер, либо жесткий хэндовер. В LTE WTRU разрешается осуществлять только жесткий хэндовер.
В активном состоянии WTRU всегда измеряет соты в его списке соседей, который посылается в SIB 11 или в сообщении управления измерением. Если список соседей сокращен или удален, как это обсуждается в LTE, то WTRU мог бы также осуществлять поиск соседних сот, детектировать их и выполнять над ними измерения.
Когда соседняя сота превышает порог диапазона сообщения или удовлетворяет критерию входа, WTRU инициирует время запуска (ТТТ), которое определяет минимальную величину времени, в течении которого WTRU должен ожидать, прежде чем он может послать отчет об измерении. ТТТ таймер может использоваться для установления длительности ТТТ. ТТТ определяется в SIB или сообщении управления измерением для каждого события. Если ТТТ истекает, и соседняя сота осталась выше порога в течение всей длительности ТТТ, то отчет об измерении запускается соответствующим событием. Затем сеть реагирует обновлением активного множества (ASU) или командой хэндовера. Если, во время ТТТ, измерение сигнала соседней соты (т.е. уровень сигнала, качество сигнала) падает ниже предварительно настроенного качества сигнала, то ТТТ для этой соседней соты завершается. Эта соседняя сота нуждается в восстановлении критериев входа для WTRU для того, чтобы снова начать измерения на этой соте.
Если во время этого процесса сигнал обслуживающей соты резко падает, или качество сигнала обслуживающей соты ухудшается, то WTRU может не быть в положении приема ASU или команды хэндовера от сети. Также соседняя сота может слегка флуктуировать выше или ниже порога, что вызывает запуск и остановку ТТТ. Следовательно, WTRU может не суметь запустить отчет об измерении для повторного выбора соседней соты.
В UMTS системах с мягким хэндовером эта проблема преимущественно не видна. Однако в LTE без мягких хэндоверов эта проблема может быть более преимущественной. Таким образом, желательна более надежная схема хэндовера, которая рассматривает состояние обслуживающей соты WTRU.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Описаны различные способы преодоления недостатков существующих механизмов детектирования скорости WTRU в UMTS. Существующие механизмы детектирования скорости WTRU являются недостаточными. Таким образом, измерение сигнала (например, уровня сигнала, качества сигнала) используется для преодоления недостатков существующих механизмов детектирования скорости WTRU. Соответственно модифицируются некоторые параметры повторного выбора, такие как значение запаздывания и значение времени Tresel таймера повторного выбора. Также значение качества запаздывания может быть масштабировано посредством существующих способов детектирования скорости WTRU в UMTS. Для хэндовера могут быть сценарии, когда требуется выполнить измерение обслуживающего сигнала и модифицировать ТТТ. Таким образом, ТТТ модифицируется согласно скорости WTRU, т.к. измерение обслуживающего сигнала коррелирует со скоростью WTRU.
Здесь описывается способ беспроводной связи регулирования критериев ранжирования обслуживающей соты, ассоциированной с WTRU. Выполняется измерение сигналов (например, RSRQ, RSCP, RSRP) обслуживающей соты. Значение запаздывания обслуживающей соты устанавливается на первое значение, если измерение сигнала обслуживающей соты превышает первый порог. Значение запаздывания обслуживающей соты устанавливается на второе значение, если измерение сигнала обслуживающей соты меньше, чем первый порог, и больше, чем второй порог, для первого интервала времени. Значение запаздывания обслуживающей соты устанавливается на третье значение, если измерение сигнала обслуживающей соты меньше, чем второй порог, для второго интервала времени. Критерии ранжирования обслуживающей соты регулируются на основе значения запаздывания обслуживающей соты после установки на одно из первого значения, второго значения и третьего значения.
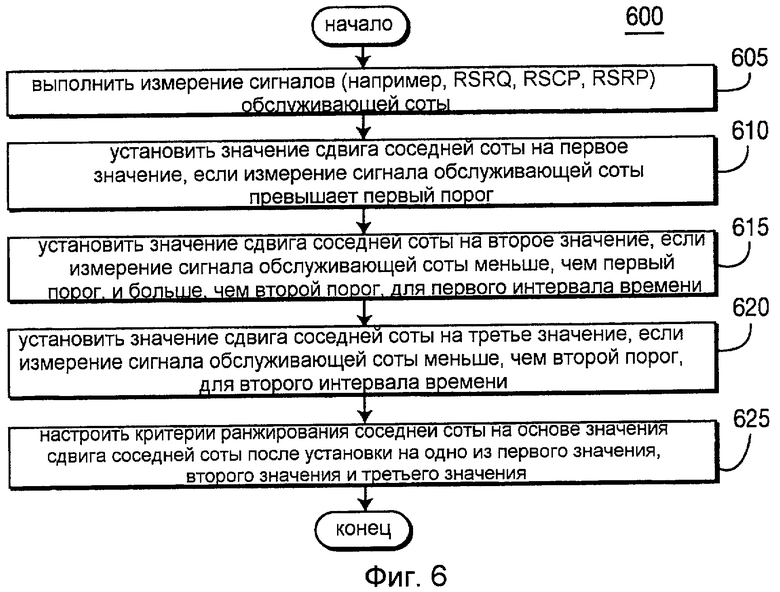
Здесь также описывается способ беспроводной связи регулировки критериев ранжирования соседней соты, ассоциированной с WTRU. Выполняется измерение сигналов (например, RSRQ, RSCP, RSRP) обслуживающей соты. Значение сдвига соседней соты устанавливается на первое значение, если измерение сигнала обслуживающей соты превышает первый порог. Значение сдвига соседней соты устанавливается на второе значение, если измерение сигнала обслуживающей соты меньше, чем первый порог, и больше, чем второй порог, для первого интервала времени. Значение сдвига соседней соты устанавливается на третье значение, если измерение сигнала обслуживающей соты меньше, чем второй порог, для второго интервала времени. Критерии ранжирования соседней соты регулируются на основе значения сдвига соседней соты после установки на одно из первого значения, второго значения и третьего значения.
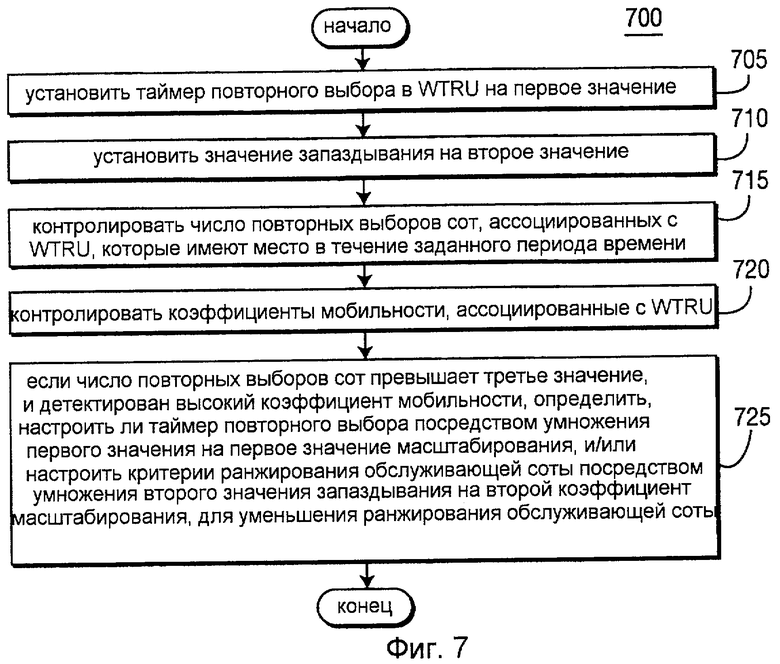
Здесь также описывается способ беспроводной связи регулировки критериев ранжирования обслуживающей соты, ассоциированной с WTRU. Таймер повторного выбора в WTRU устанавливается на первое значение. Значение запаздывания устанавливается на второе значение. Контролируется число повторных выборов сот, ассоциированных с WTRU, которые имеют место в течение заданного периода времени. Контролируются коэффициенты мобильности, ассоциированные с WTRU. Принимается решение относительно того, настроить ли таймер повторного выбора посредством умножения первого значения на первый коэффициент масштабирования и/или настроить критерии ранжирования обслуживающей соты посредством умножения второго значения запаздывания на второй коэффициент масштабирования, для уменьшения ранжирования обслуживающей соты, если число повторных выборов сот превышает третье значение, и детектирован высокий коэффициент мобильности.
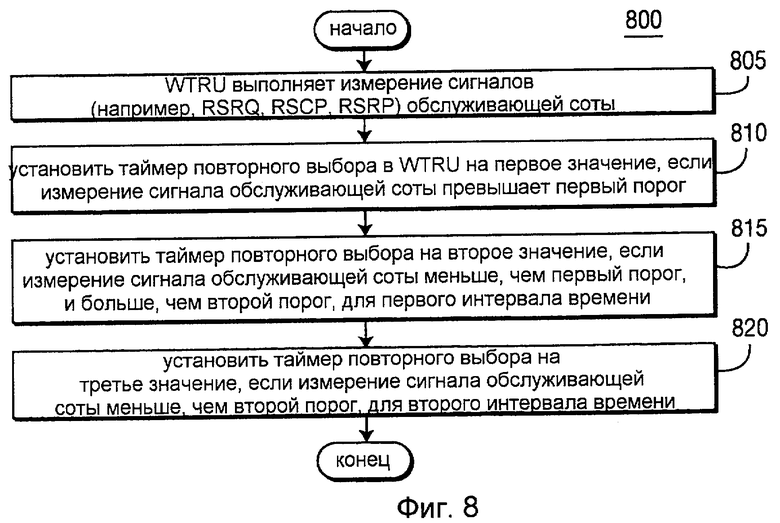
Здесь также описывается способ беспроводной связи регулировки таймера повторного выбора в WTRU. Выполняется измерение сигналов (например, RSRQ, RSCP, RSRP) обслуживающей соты. Таймер повторного выбора в WTRU устанавливается на первое значение, если измерение сигнала обслуживающей соты превышает первый порог. Таймер повторного выбора устанавливается на второе значение, если измерение сигнала обслуживающей соты меньше, чем первый порог, и больше, чем второй порог, для первого интервала времени. Таймер повторного выбора устанавливается на третье значение, если измерение сигнала обслуживающей соты меньше, чем второй порог, для второго интервала времени.
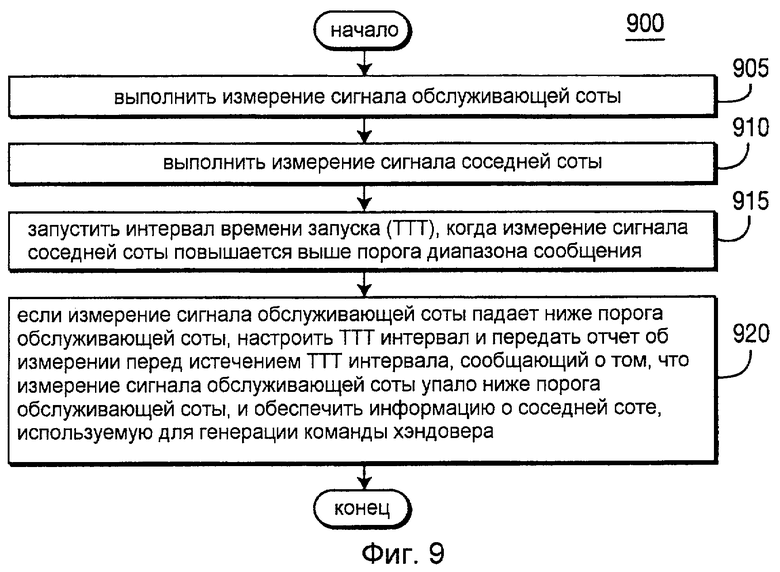
Здесь также описывается способ сообщения измерения сигнала соты, выполняемый посредством WTRU. Выполняются измерение сигнала обслуживающей соты и измерение сигнала соседней соты. ТТТ интервал запускается, когда измерение сигнала соседней соты поднимается выше порога диапазона сообщения. Если измерение сигнала обслуживающей соты падает ниже порога обслуживающей соты, то перед истечением ТТТ интервала передается отчет об измерении, сообщающий о том, что измерение сигнала обслуживающей соты упало ниже порога обслуживающей соты, и обеспечивающий информацию о соседней соте, используемую для генерации команды хэндовера. Альтернативно, если измерение сигнала обслуживающей соты падает ниже порога обслуживающей соты и остается ниже этого порога в течение заданного интервала времени, то в течение ТТТ интервала передается отчет об измерении, сообщающий о том, что измерение сигнала обслуживающей соты упало ниже порога обслуживающей соты, и обеспечивающий информацию о соседней соте, используемую для генерации команды хэндовера.
КРАТКИЙ ПЕРЕЧЕНЬ ЧЕРТЕЖЕЙ
Более подробное понимание может быть получено из следующего описания, данного посредством примера в сопряжении с сопутствующими чертежами, в которых:
фиг.1 показывает вариацию различных сигналов со временем и другие величины, используемые в решениях хэндовера;
фиг.2 является блок-схемой процесса повторного выбора сот;
фиг.3 является блок-схемой процедуры хэндовера с использованием ТТТ масштабирования;
фиг.4 показывает пример конфигурации WTRU, используемой для выполнения способов, описанных здесь;
фиг.5 является блок-схемой способа беспроводной связи регулировки критериев ранжирования обслуживающей соты, ассоциированной с WTRU;
фиг.6 является блок-схемой способа беспроводной связи регулировки критериев ранжирования соседней соты, ассоциированной с WTRU;
фиг.7 является блок-схемой способа беспроводной связи регулировки критериев ранжирования обслуживающей соты, ассоциированной с WTRU;
фиг.8 является блок-схемой способа беспроводной связи регулировки таймера повторного выбора в WTRU и
фиг.9 и 10 являются блок-схемами способов сообщения измерений сигналов сот, выполняемых посредством WTRU.
ПОДРОБНОЕ ОПИСАНИЕ
При дальнейшей ссылке термин «блок беспроводной передачи/приема (WTRU)» включает в себя, но не ограничен этим, оборудование пользователя (UE), мобильную станцию, фиксированный или мобильный блок абонента, пейджер, сотовый телефон, электронный секретарь (PDA), компьютер или любой другой тип устройства пользователя, способный работать в беспроводной среде.
При дальнейшей ссылке термин «базовая станция» включает в себя, но не ограничен этим, Узел В, контроллер сайта, точку доступа (AP) или любой другой тип сопрягающего устройства, способного работать в беспроводной среде.
В первом способе беспроводной связи, описанном здесь, рассматриваемой системой является LTE, а RSRQ и RSRP используются в качестве величин измерений. Альтернативно, могли бы быть выбраны другие величины измерений без влияния на изобретение. Следующее может быть применено как к современным UMTS системам, так и к LTE.
Qhyst1s является значением запаздывания, которое передается. В следующем способе это значение запаздывания масштабируется, и вводится новое значение запаздывания, названное Qhyst, которое основано на измерении обслуживающих сигналов (RSRQ, RSCP, RSRP), которое, в свою очередь, является мерой мобильности.
Может возникнуть ситуация, в которой качество сигнала обслуживающей соты может упасть слишком быстро перед тем, как происходит повторный выбор соты, или критерии высокой мобильности могут не удовлетворяться. Таким образом, WTRU испытывал бы отказы повторного выбора соты. Эта проблема может быть адресована посредством принятия во внимание качества обслуживающей соты при осуществлении повторного выбора соты. Хотя критерии расположения на соте могут оставаться теми же самыми, что и в предыдущих системах, или быть модифицированными, теперь будет описана модификация самих критериев ранжирования и таймера повторного выбора.
Возможны многие вариации для ранжирования обслуживающей и соседней соты. Отметим, что все уравнения ниже используют величину измерения RSRQ, которая, как упоминалось ранее, предполагается аналогичной Ec/I0. Подобное множество уравнений может быть записано с величиной измерения RSRP, которая, как упоминалось ранее, предполагается аналогичной RSCP. Отметим, что в уравнениях ниже величина RSRQ может быть заменена любой другой соответствующей мерой «качества сигнала», тогда как величина RSCP может быть заменена любой другой соответствующей мерой «уровня сигнала» или любыми другими соответствующими мерами.
Для обслуживающей соты критерии ранжирования сохраняются теми же самыми, а именно:

где RSRQs - принятое качество эталонного символа обслуживающей соты.
Для соседней соты, однако, критерии ранжирования модифицируются следующим образом:

где RSRQn - принятое качество эталонного символа соседней соты n или, в общем,

Рассматривая Rank_n как функцию, которая адаптирована на основе RSRQs, мы совершенствуем критерии ранжирования и избегаем потенциальных проблем существующей схемы повторного выбора сот.
Может быть введен дополнительный параметр, названный Qhyst, который применяется посредством WTRU следующим образом:
где х - порог измерения сигнала соты,
В противном случае,
Т11 х>RSRQs>y,
где Т11 - значение таймера, которое указывает интервал времени, в течение которого RSRQ должно быть между 2 порогами х и y,
В противном случае,
где z1>z3>z2 и x>y.
Значения x, y, z1, z2, z3, Т11 и Т12 могут либо определяться сетью в зависимости от реализации, либо определяться стандартно после результатов моделирования. Т11 и Т12 являются интервалами времени, для которых должны быть выполнены условия для RSRQ. Пороги обслуживающей соты или значения Qhyst могут быть переданы динамически через RRC сообщения (например, в одном или нескольких SIB).
Когда измерение сигнала обслуживающей соты ниже некоторого порога, ранг соседней соты улучшается посредством вычитания меньшего значения из величины измерения, которой в этом случае является RSRQ. Если измерение сигнала обслуживающей соты выше некоторого порога, то все же может быть вычтено значение Qoffset2 или величины z1, или z3, в зависимости от этого порога и в зависимости от значений z1 и z3. Для эффективной работы этого алгоритма z2 должно быть, по меньшей мере, меньше, чем Qoffset2.
Альтернативно, мы могли бы иметь двухуровневый порог, когда выше значения х мы можем использовать значение запаздывания, подобное тому, которое используется сегодня в UMTS системах, или использовать новое значение z1 запаздывания. Если уровень сигнала WTRU падает ниже значения х для интервала времени Т13, то может использоваться значение Qhyst, равное z2. Альтернативно, вместо передачи сетью нового значения х WTRU мог бы использовать один из существующих порогов, такой как Qqualmin, для значения х, и сеть в таком случае не нуждалась бы в передаче каких-либо новых порогов. Также, для интервала времени Т13, WTRU может использовать один из существующих значений интервалов времени, переданных сетью, и, возможно, сети не нужно будет передавать некоторое новое значение Т13 интервала времени.
Альтернативно, вместо определения различных значений сеть могла бы передать одно значение (скажем, z1) и значение масштабируемости вместе с ним, помогающее WTRU вычислить z2 и z3.
Альтернативно, вместо трех уровней можно было бы использовать n уровней, где n≥2, где эти пороги могли бы опять же либо зависеть от реализации или определяться сетью, либо определяться в стандарте после результатов моделирования. Эти пороги могут передаваться динамически через RRC сообщения (например, в одном или нескольких SIB).
Альтернативно, уравнения, описанные выше, могут быть также записаны следующим образом.
Для обслуживающей соты критерии ранжирования модифицируются следующим образом:

Для соседней соты ранжирование сот сохраняется таким же:

Вычисление Qhyst было бы таким же, как упомянуто выше.
Альтернативно, значение Qhyst2 или Qoffset2 могло бы быть устранено, и уравнения записываются в следующем виде.
Для обслуживающей соты критерии ранжирования могут быть сохранены прежними:

Для соседней соты, однако, критерии ранжирования модифицируются следующим образом:

Вычисление Qhyst было бы таким же, как упомянуто выше.
Альтернативно, для обслуживающей соты критерии ранжирования могут быть модифицированы следующим образом:

Для соседней соты сохраняется то же самое ранжирование:

Вычисление Qhyst является тогда таким же, как упомянуто выше.
Подобнее множество уравнений с параметром Qhyst может быть применено, когда параметром измерения является RSRP.
Даже хотя вышеуказанные уравнения выполняются для неиерархической структуры сот (HCS), параметр Qhyst мог бы также применяться к уравнениям, когда используется HCS.
Отметим, что в предыдущих уравнениях желаемый эффект MBMS мог бы быть нейтрализован посредством установки Qoffmbms на 0 (например, в случае, когда нет MBMS службы или если ее не хотят рассматривать в критериях повторного выбора сот).
Альтернативно или дополнительно, описывается, что когда число повторных выборов сот в течение некоторого периода времени TCRmax превышает значение NCR и детектирован высокий коэффициент мобильности, вместо простого умножения Tresel на коэффициент мобильности, как в современных UMTS системах, предлагается также иметь вариант умножения значения Qhyst на коэффициент масштабирования для уменьшения ранга обслуживающей соты. Это умножение значения Qhyst на коэффициент масштабирования могло бы быть выполнено в дополнение к умножению значения Tresel на коэффициент масштабирования, или только одно из них могло бы быть умножено на коэффициент масштабирования, что могло бы быть решено самим WTRU, в зависимости от некоторого фактора, такого как условия радиопередачи, или могло бы быть передано сетью, которая может зависеть от соты, или на основе какого-либо другого фактора. Этот коэффициент масштабирования для Qhyst может быть либо тем же самым, что и используемый для Tresel, либо может передаваться другой коэффициент масштабирования для умножения на значение Qhyst.
Для интервала времени Tresel многоуровневый таймер повторного выбора осуществляется следующим образом.
Если RSRQs>x, то значение Tresel (таймера повторного выбора), которое могло бы быть использовано, может быть тем же самым, что и значение таймера повторного выбора, который в настоящее время используется в UMTS системах (т.е. масштабирование не требуется).
В противном случае, если x>RSRQs>y для интервала времени Т14, то Tresel уменьшается до значения z3.
В противном случае, если RSRQs<y для интервала времени Т15, то Tresel=0 или очень малому значению z2, где z1>z3>z2 и x>y.
Значения x, y, z1, z2, z3, T14 и Т15 могли бы либо зависеть от реализации, или определяться сетью, либо определяться в стандарте после результатов моделирования. Временными интервалами Т14 и Т15 являются интервалы для времени, в течение которого должны быть выполнены условия для RSRQ. Они могут передаваться динамически через RRC сообщения (например, в одном или нескольких SIB).
В общем, таймер повторного выбора адаптирован и осуществляет функцию от RSRQs:
Tresel=function(RSRQs).
Как видно, в зависимости от силы (уровня) обслуживающей WTRU соты, Tresel таймер уменьшается для более быстрого повторного выбора и перехода к соседней соте.
Альтернативно, мог бы быть двухуровневый порог, где выше значения х мы могли бы использовать подобный Tresel таймер, как и современные UMTS системы, или новый таймер z1 повторного выбора, и если уровень сигнала WTRU падает ниже значения х для интервала времени Т16, либо используется сокращенный Tresel таймер, либо таймер повторного выбора вообще не используется. Альтернативно, вместо передачи сетью нового значения х, WTRU мог бы использовать один из текущих порогов, передаваемых сегодня, подобный Qqualmin, для значения х, и сеть в этом случае не нуждалась бы в передаче каких-либо новых порогов. Также, для интервала времени Т16, WTRU мог бы использовать одно из существующих значений таймера, переданных сетью, и, возможно, передача сетью нового значения Т16 интервала времени не потребуется. Интервалы времени Т14, Т15 и Т16 могут быть такими же, что и интервалы времени Т11, Т12 и Т13, или они могут быть другими.
Альтернативно, вместо определения различных значений сеть могла бы передать одно значение (скажем, z1) и значение масштабируемости вместе с ним для помощи WTRU в вычислении z2 и z3.
Альтернативно, вместо 2 или 3 уровней могло бы быть n уровней, где n>=2, где пороги могли бы быть опять либо зависящими от реализации, или определяться сетью, либо определяться в стандарте после результатов моделирования. Эти пороги или значения таймера могут быть переданы динамически через RRC сообщения (например, в одном или нескольких SIB).
Либо сеть, либо WTRU мог бы решить использовать как адаптивные критерии ранжирования, так и таймер повторного выбора или любой из них в отдельности для более надежного повторного выбора сот.
Для идеи адаптивного повторного выбора, основанного на уровне сигнала, описанной здесь, умножение значения Qhyst на коэффициент масштабирования могло бы осуществляться в дополнение к умножению значения Tresel на коэффициент масштабирования, или одно из них могло бы быть умножено на коэффициент масштабирования, который может быть выбран самим WTRU, в зависимости от некоторого фактора, такого как условия радиопередачи, или может быть передан сетью, что могло бы зависеть от соты, или на основе какого-либо другого фактора. Этот коэффициент масштабирования для Qhyst может либо быть таким же, как и используемый для Tresel, либо может быть передан другой коэффициент масштабирования для умножения на значение Qhyst. Также коэффициент масштабирования, передаваемый для способа адаптивного повторного выбора, предложенного выше, может быть таким же, что и передается в настоящее время для сценария высокой мобильности, или мог бы передаваться другой коэффициент масштабирования, подлежащий использованию специфически для адаптивного повторного выбора на основе уровня сигнала.
Следующее описывает ослабление отказа хэндовера, вызванное посредством слишком резкого падения обслуживающей соты, в котором качество обслуживающей соты принимается во внимание во время процедуры хэндовера.
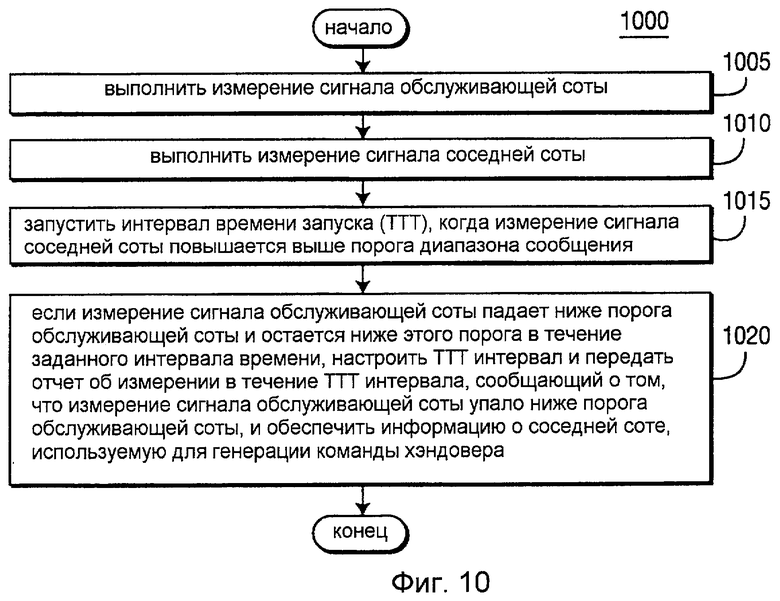
На фиг.1 показана временная шкала для запуска отчета об измерении для измерения сигнала обслуживающей соты, падающего ниже некоторого порога, где предполагается следующее.
Измерение сигналов (например, RSRQ, RSCP, RSRP) обслуживающей соты в зависимости от времени.
Измерение сигналов (например, RSRQ, RSCP, RSRP) соседней соты в зависимости от времени.
Порог х обслуживающей соты: Порог, ниже которого обслуживающая сота посылает отчет об измерении к сети.
Диапазон отчета: Значение, выше которого запускается ТТТ интервал на соседней соте.
Время Т1: Время, когда соседняя сота поднимается выше диапазона сообщения для запуска ТТТ интервала.
Время Т2: Время, когда измерение сигнала обслуживающей соты падает ниже порога х обслуживающей соты и посылает отчет об измерении к сети, сообщающий о том, что измерение сигнала обслуживающей соты упало ниже этого порога, и дающий информацию о соседней соте, на которой идет обратный отсчет ТТТ интервала.
Альтернативно, вместо значения Т2 интервал времени Т4 (не показан на фиг.1) может использоваться в качестве величины времени, когда измерение сигнала обслуживающей соты может оказаться ниже порога х обслуживающей соты. Таким образом, когда обслуживающая сота была конкретным порогом для длительности интервала времени Т4, WTRU может послать отчет об измерении. Кроме того, порогом обслуживающей соты может быть одно из значений, уже переданных в SIB, такое как Qqualmin, или порог сигнала обслуживающей соты может быть передан отдельно либо через широковещательное сообщение, либо как часть некоторого специализированного RRC сообщения управления измерениями.
Время Т3: Время, когда ТТТ интервал истек, и WTRU может сообщить сети отчет об измерении, как и прежде.
Как видно на фиг.1, когда измерение сигнала соседней соты поднимается выше диапазона сообщения, WTRU может запустить ТТТ интервал для соседней соты. В течение прогона ТТТ интервала, если измерение сигнала обслуживающей соты падает ниже порога х обслуживающей соты, WTRU может послать отчет об измерении перед истечением ТТТ интервала, сообщая, что измерение сигнала обслуживающей соты упало ниже порога х. Отчет об измерении также идентифицировал бы соседнюю соту, на которой идет обратный отсчет ТТТ интервала, посредством чего от сети требуется генерация команды хэндовера немедленно для ускорения хэндовера.
Альтернативно, после запуска ТТТ интервала WTRU может послать отчет об измерении, который указывает, что измерение сигнала обслуживающей соты упало ниже порога х обслуживающей соты, и идентифицирует соседнюю соту, на которой идет обратный отсчет ТТТ интервала, посредством чего от сети требуется немедленно послать команду хэндовера для ускорения хэндовера, если измерение сигнала обслуживающей соты падает и остается ниже порога х обслуживающей соты в течение интервала времени Т4. Если команда хэндовера не принята, и если ТТТ интервал истекает с соседней сотой, оставшейся выше диапазона сообщения в течение всей длительности ТТТ интервала, то отчет об измерении запускается соответствующим событием. Например, при добавлении соседней соты к активному множеству и принятии команды хэндовера WTRU может остановить свой ТТТ интервал и выполнить процедуру хэндовера.
Альтернативно, если соседняя сота не удовлетворяет критерию сообщения, или если измерение сигнала соседней соты падает ниже критериев выхода в течение длительности ТТТ интервала, и измерение сигнала обслуживающей соты падает ниже некоторого порога, то WTRU все же может послать отчет об измерении к сети, сообщающий о том, что измерение сигнала обслуживающей соты упало ниже этого порога. Сеть может затем использовать эту информацию для выполнения слепого хэндовера или послать некоторый сигнал к WTRU, уменьшающий ТТТ интервал и/или снижающий диапазон сообщения, или использовать ее любым способом, который она считает подходящим для этого WTRU/сценария.
Порог обслуживающей соты может быть послан сетью в SIB или в сообщении управления измерениями, или в любом другом сообщении, или мог бы быть определен посредством WTRU, или может быть упомянут в стандартах, основанных на результатах моделирования.
Принципы адаптивной посылки отчета об измерении на основе порога обслуживающей соты перед истечением ТТТ интервала может быть применен к внутричастотному, и/или межчастотному, и/или inter-RAT хэндоверам.
Если измерение сигнала обслуживающей соты падает слишком резко, или ТТТ интервал является слишком длинным, и качество обслуживающей соты ухудшается, вызов может быть спасен с использованием способов и устройства, описанных выше. Кроме того, посредством использования адаптивного повторного выбора сот и процедуры хэндовера WTRU более вероятно поддержит обслуживание и поддержит вызов во время повторного выбора соты и процедуры хэндовера.
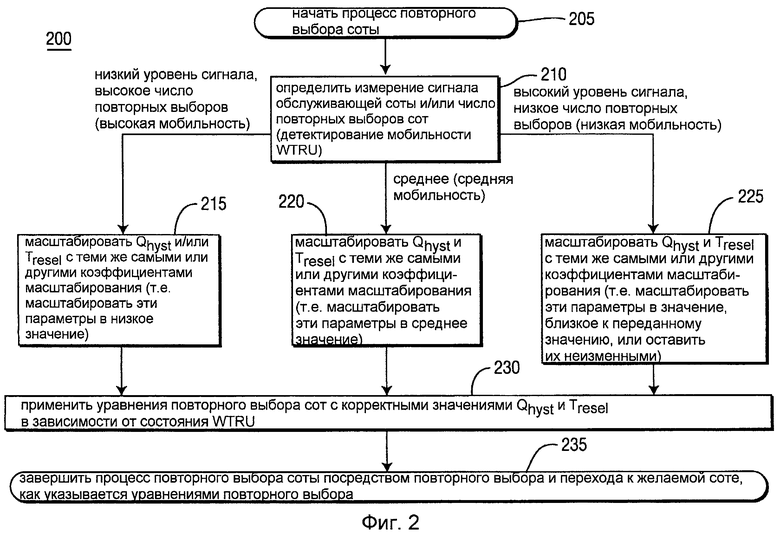
Фиг.2 является блок-схемой процесса 200 повторного выбора сот. Процесс повторного выбора сот начинается на стадии 205. На стадии 210 принимается решение о том, каким является измерение сигнала обслуживающей соты и/или число повторных выборов сот (детектирование мобильности WTRU). Если измерение сигнала обслуживающей соты является низким и/или число повторных выборов сот является высоким, указывающим на высокую мобильность, то Qhyst и/или Tresel масштабируются на стадии 215 с теми же самыми или другими коэффициентами масштабирования (т.е. эти параметры масштабируются до низкого значения). Если измерение сигнала обслуживающей соты и/или число повторных выборов сот является средним, указывающим на среднюю мобильность, то Qhyst и/или Tresel масштабируются на стадии 220 с теми же самыми или другими коэффициентами масштабирования (т.е. параметры масштабируются к среднему значению). Если измерение сигнала обслуживающей соты является высоким и/или число повторных выборов сот является низким, указывающим низкую мобильность, то Qhyst и/или Tresel масштабируются на стадии 225 с теми же самыми или другими коэффициентами масштабирования (т.е. эти параметры масштабируются до переданного значения, или оно остается неизменным). На стадии 230 уравнения повторного выбора сот применяются с корректными значениями Qhyst и Tresel, в зависимости от состояния WTRU. На стадии 235 процесс 200 повторного выбора сот завершается повторным выбором желаемой соты, как указано уравнениями повторного выбора.
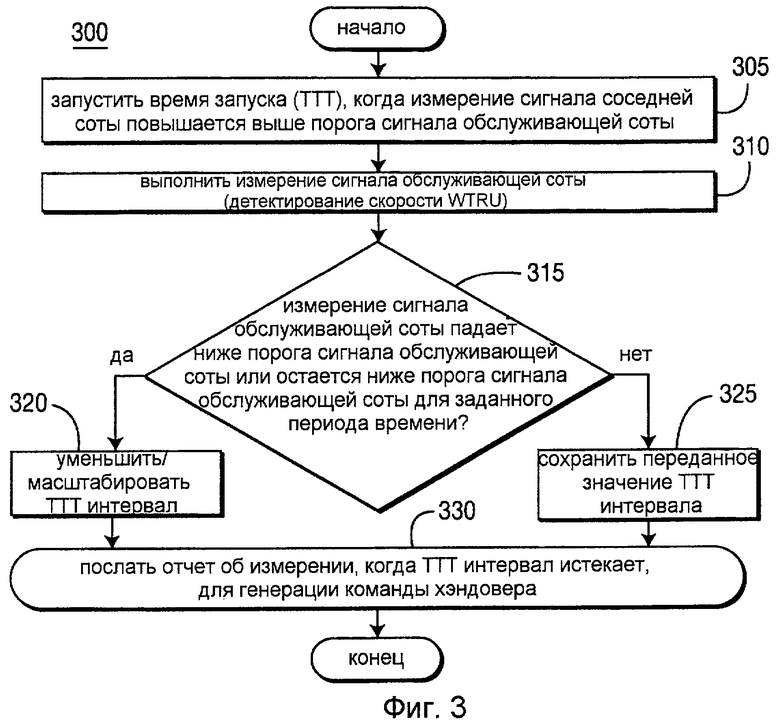
Фиг.3 является блок-схемой процедуры хэндовера 300, использующей ТТТ масштабирование. На стадии 305 ТТТ интервал запускается, когда измерение сигнала соседней соты повышается выше порога сигнала обслуживающей соты. На стадии 310 выполняется измерение сигнала обслуживающей соты (детектирование скорости WTRU). На стадии 315, если измерение сигнала обслуживающей соты падает ниже порога сигнала обслуживающей соты или остается ниже порога сигнала обслуживающей соты для заданного периода времени, ТТТ интервал уменьшается/масштабируется (стадия 320). В противном случае переданное значение ТТТ интервала сохраняется (стадия 325). На стадии 330 по истечении ТТТ интервала посылается отчет об измерении для генерации команды хэндовера.
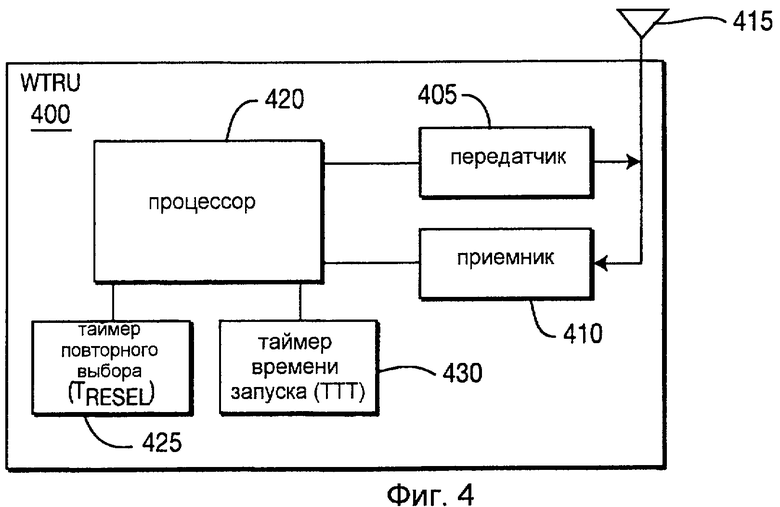
Фиг.4 показывает пример конфигурации WTRU 400, используемый для выполнения способов, описанных здесь. WTRU 400 включает в себя передатчик 405, приемник 410, антенну 415, процессор 420, таймер 425 повторного выбора и ТТТ таймер 430.
Приемник 410 выполнен с возможностью выполнения измерения сигналов (например, RSRQ, RSCP, RSRP) обслуживающей соты. Процессор 420 выполнен с возможностью установки значения запаздывания обслуживающей соты на первое значение, если измерение сигнала обслуживающей соты превышает первый порог, установки значения запаздывания обслуживающей соты на второе значение, если измерение сигнала обслуживающей соты меньше, чем первый порог, и больше, чем второй порог, для первого интервала времени, установки значения запаздывания обслуживающей соты на третье значение, если измерение сигнала обслуживающей соты меньше, чем второй порог, для второго интервала времени, и регулировки критериев ранжирования обслуживающей соты на основе значения запаздывания обслуживающей соты после установки на одно из первого значения, второго значения и третьего значения.
Приемник 410 дополнительно выполнен с возможностью выполнения измерения сигналов (например, RSRQ, RSCP, RSRP) обслуживающей соты. Процессор 420 выполнен с возможностью установки значения сдвига соседней соты на первое значение, если измерение сигнала обслуживающей соты превышает первый порог, установки значения сдвига соседней соты на второе значение, если измерение сигнала обслуживающей соты меньше, чем первый порог, и больше, чем второй порог, для первого интервала времени, установки значения сдвига соседней соты на третье значение, если измерение сигнала обслуживающей соты меньше, чем второй порог, для второго интервала времени, и регулировки критериев ранжирования соседней соты на основе этого значения сдвига соседней соты после установки на одно из первого значения, второго значения и третьего значения.
Процессор 420 дополнительно выполнен с возможностью установки таймера 425 повторного выбора на первое значение, если измерение сигнала обслуживающей соты превышает первый порог, установки таймера 425 повторного выбора на второе значение, если измерение сигнала обслуживающей соты меньше, чем первый порог, и больше, чем второй порог, для первого интервала времени, и установки таймера 425 повторного выбора на третье значение, если измерение сигнала обслуживающей соты меньше, чем второй порог, для второго интервала времени.
Приемник 410 дополнительно выполнен с возможностью выполнения измерения сигнала обслуживающей соты и измерения сигнала соседней соты. Процессор 420 дополнительно выполнен с возможностью запуска ТТТ интервала, установленного ТТТ таймером 430, когда измерение сигнала соседней соты повышается выше порога диапазона сообщения, и регулировки этого ТТТ интервала. Передатчик 405 выполнен с возможностью передачи отчета об измерении перед истечением ТТТ интервала, если измерение сигнала обслуживающей соты падает ниже порога обслуживающей соты, причем этот отчет об измерении указывает, что измерение сигнала обслуживающей соты упало ниже порога обслуживающей соты, и обеспечивает информацию о соседней соте, используемую для генерации команды хэндовера. Передатчик 405 дополнительно выполнен с возможностью передачи отчета об измерении в течение ТТТ интервала, если измерение сигнала обслуживающей соты падает ниже порога обслуживающей соты и остается ниже этого порога в течение заданного интервала времени.
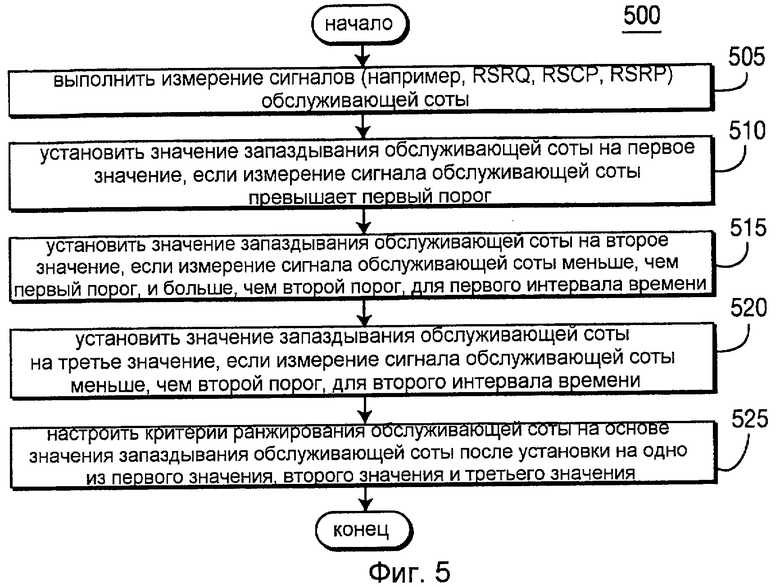
Фиг.5 является блок-схемой способа 500 беспроводной связи регулировки критериев ранжирования обслуживающей соты, ассоциированной с WTRU. На стадии 505 выполняется измерение сигналов (например, RSRQ, RSCP, RSRP) обслуживающей соты. На стадии 510 значение запаздывания обслуживающей соты устанавливается на первое значение, если измерение сигнала обслуживающей соты превышает первый порог. На стадии 515 значение запаздывания обслуживающей соты устанавливается на второе значение, если измерение сигнала обслуживающей соты меньше, чем первый порог, и больше, чем второй порог, для первого интервала времени. На стадии 520 значение запаздывания обслуживающей соты устанавливается на третье значение, если измерение сигнала обслуживающей соты меньше, чем второй порог, для второго интервала времени. На стадии 525 критерии ранжирования обслуживающей соты регулируются на основе этого значения запаздывания обслуживающей соты после установки на одно из первого значения, второго значения и третьего значения.
Фиг.6 является блок-схемой способа 600 беспроводной связи регулировки критериев ранжирования соседней соты, ассоциированной с WTRU. На стадии 605 выполняется измерение сигналов (например, RSRQ, RSCP, RSRP) обслуживающей соты. На стадии 610 значение сдвига соседней соты устанавливается на первое значение, если измерение сигнала обслуживающей соты превышает первый порог. На стадии 615 значение сдвига соседней соты устанавливается на второе значение, если измерение сигнала обслуживающей соты меньше, чем первый порог, и больше, чем второй порог, для первого интервала времени. На стадии 620 значение сдвига соседней соты устанавливается на третье значение, если измерение сигнала обслуживающей соты меньше, чем второй порог, для второго интервала времени. На стадии 625 критерии ранжирования соседней соты регулируются на основе этого значения сдвига соседней соты после установки на одно из первого значения, второго значения и третьего значения.
Фиг.7 является блок-схемой способа 700 беспроводной связи регулировки критериев ранжирования обслуживающей соты, ассоциированной с WTRU. На стадии 705 таймер повторного выбора в WTRU устанавливается на первое значение. На стадии 710 значение запаздывания устанавливается на второе значение. На стадии 715 контролируется число повторных выборов сот, ассоциированных с этим WTRU, которые имеют место в течение заданного периода времени. На стадии 720 контролируются коэффициенты мобильности, ассоциированные с WTRU. На стадии 725, если число повторных выборов сот превышает третье значение, и детектирован высокий коэффициент мобильности, принимается решение относительно того, должна ли быть выполнена первая регулировка таймера повторного выбора посредством умножения первого значения на первый коэффициент масштабирования, должна ли быть выполнена вторая регулировка критериев ранжирования обслуживающей соты посредством умножения второго значения значения запаздывания на второй коэффициент масштабирования или должны ли быть выполнены обе регулировки для уменьшения ранжирования обслуживающей соты.
Фиг.8 является блок-схемой способа 800 беспроводной связи регулировки таймера повторного выбора в WTRU. На стадии 805 измерение сигналов (например, RSRQ, RSCP, RSRP) обслуживающей соты выполняется посредством WTRU. На стадии 810 таймер повторного выбора в WTRU устанавливается на первое значение, если измерение сигнала обслуживающей соты превышает первый порог. На стадии 815 таймер повторного выбора устанавливается на второе значение, если измерение сигнала обслуживающей соты меньше, чем первый порог, и больше, чем второй порог, для первого интервала времени. На стадии 820 таймер повторного выбора устанавливается на третье значение, если измерение сигнала обслуживающей соты меньше, чем второй порог, для второго интервала времени.
Фиг.9 является блок-схемой способа 900 сообщения измерения сигнала соты, выполняемого посредством WTRU. На стадии 905 выполняется измерение сигналов обслуживающей соты. На стадии 910 выполняется измерение сигналов соседней соты. На стадии 915 запускается ТТТ интервал, когда измерение сигнала соседней соты повышается выше порога диапазона сообщения. На стадии 920, если измерение сигнала обслуживающей соты падает ниже порога обслуживающей соты, ТТТ интервал регулируется, и перед истечением ТТТ интервала передается отчет об измерении, сообщающий о том, что измерение сигнала обслуживающей соты упало ниже порога обслуживающей соты, и обеспечивающий информацию о соседней соте, используемую для генерации команды хэндовера.
Фиг.10 является блок-схемой способа 1000 сообщения измерения сигнала соты, выполняемого посредством WTRU. На стадии 1005 выполняется измерение сигналов соты. На стадии 1010 выполняется измерение сигнала соседней соты. На стадии 1015 запускается ТТТ интервал, когда измерение сигнала соседней соты повышается выше порога диапазона сообщения. На стадии 1020, если измерение сигнала обслуживающей соты падает ниже порога обслуживающей соты и остается ниже этого порога в течение заданного интервала времени, ТТТ интервал регулируется, и в течение этого ТТТТ интервала передается отчет об измерении, сообщающий о том, что измерение сигнала обслуживающей соты упало ниже порога обслуживающей соты, и обеспечивающий информацию о соседней соте, используемую для генерации команды хэндовера.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ
1. Способ беспроводной связи регулировки критериев ранжирования обслуживающей соты, ассоциированной с блоком беспроводной передачи/приема (WTRU), причем этот способ предусматривает:
выполнение измерения сигнала обслуживающей соты;
установку значения запаздывания (запаздывания) обслуживающей соты на первое значение, если измерение сигнала обслуживающей соты превышает первый порог;
установку значения запаздывания обслуживающей соты на второе значение, если измерение сигнала обслуживающей соты меньше, чем первый порог, и больше, чем второй порог, для первого интервала времени;
установку значения запаздывания обслуживающей соты на третье значение, если измерение сигнала обслуживающей соты меньше, чем второй порог, для второго интервала времени; и
регулировку критериев ранжирования обслуживающей соты на основе значения запаздывания обслуживающей соты после установки на одно из первого значения, второго значения и третьего значения.
2. Способ варианта осуществления 1, в котором измерением сигнала обслуживающей соты является принятое качество эталонного символа (RSRQ), а первым и вторым порогами являются RSRQ пороги.
3. Способ варианта осуществления 1, в котором измерением сигнала обслуживающей соты является принятая мощность кода символа (RSCP), а первым и вторым порогами являются RSCP пороги.
4. Способ варианта осуществления 1, в котором измерением сигнала обслуживающей соты является принятая мощность эталонного сигнала (RSRP), а первым и вторым порогами являются RSRP пороги.
5. Способ по любому из вариантов осуществления 1-4, в котором измерение сигнала обслуживающей соты используется для вычисления различных уровней скорости, ассоциированных с WTRU.
6. Способ по любому из вариантов осуществления 1-5, в котором первое значение больше, чем второе значение, второе значение больше, чем третье значение, и первый порог больше, чем второй порог.
7. Способ по любому из вариантов осуществления 1-6, в котором первое, второе и третье значения передаются сетью.
8. Способ по любому из вариантов осуществления 1-7, в котором первое значение и по меньшей мере один коэффициент масштабирования передаются сетью, а второе и третье значения выводятся из первого значения с использованием по меньшей мере одного коэффициента масштабирования.
9. Способ по любому из вариантов осуществления 1-8, дополнительно предусматривающий:
регулировку значения времени таймера повторного выбора, расположенного в WTRU, на основе того, как измерение сигнала сравнивается с первым и вторым порогами.
10. Способ по любому из вариантов осуществления 1-9, дополнительно предусматривающий:
принятие сообщения управления радиоресурсами (RRC), указывающего по меньшей мере одно из первого порога и второго порога.
11. Способ по любому из вариантов осуществления 1-10, дополнительно предусматривающий:
принятие сообщения управления радиоресурсами (RRC), указывающего по меньшей мере одно из первого значения, второго значения и третьего значения.
12. Способ беспроводной связи регулировки критериев ранжирования соседней соты, ассоциированной с блоком беспроводной передачи/приема (WTRU), причем этот способ предусматривает:
выполнение измерения сигнала обслуживающей соты;
установку значения сдвига соседней соты на первое значение, если измерение сигнала обслуживающей соты превышает первый порог;
установку значения сдвига соседней соты на второе значение, если измерение сигнала обслуживающей соты меньше, чем первый порог, и больше, чем второй порог, для первого интервала времени;
установку значения сдвига соседней соты на третье значение, если измерение сигнала обслуживающей соты меньше, чем второй порог, для второго интервала времени; и
регулировку критериев ранжирования соседней соты на основе значения сдвига соседней соты после установки на одно из первого значения, второго значения и третьего значения.
13. Способ варианта осуществления 12, в котором измерением сигнала обслуживающей соты является принятое качество эталонного символа (RSRQ), а первым и вторым порогами являются RSRQ пороги.
14. Способ варианта осуществления 12, в котором измерением сигнала обслуживающей соты является принятая мощность кода символа (RSCP), а первым и вторым порогами являются RSCP пороги.
15. Способ варианта осуществления 12, в котором измерением сигнала обслуживающей соты является принятая мощность эталонного сигнала (RSRP), а первым и вторым порогами являются RSRP пороги.
16. Способ по любому из вариантов осуществления 12-15, в котором измерение сигнала обслуживающей соты используется для вычисления различных уровней скорости, ассоциированных с WTRU.
17. Способ по любому из вариантов осуществления 12-16, в котором первое значение больше, чем второе значение, второе значение больше, чем третье значение, и первый порог больше, чем второй порог.
18. Способ по любому из вариантов осуществления 12-17, в котором первое, второе и третье значения передаются сетью.
19. Способ по любому из вариантов осуществления 12-18, в котором первое значение и по меньшей мере один коэффициент масштабирования передаются сетью, а второе и третье значения выводятся из первого значения с использованием по меньшей мере одного коэффициента масштабирования.
20. Способ по любому из вариантов осуществления 12-19, дополнительно предусматривающий:
регулировку значения времени таймера повторного выбора, расположенного в WTRU, на основе того, как измерение сигнала сравнивается с первым и вторым порогами.
21. Способ по любому из вариантов осуществления 12-20, дополнительно предусматривающий:
принятие сообщения управления радиоресурсами (RRC), указывающего по меньшей мере одно из первого порога и второго порога.
22. Способ по любому из вариантов осуществления 12-21, дополнительно предусматривающий:
принятие сообщения управления радиоресурсами (RRC), указывающего по меньшей мере одно из первого значения, второго значения и третьего значения.
23. Блок беспроводной передачи/приема (WTRU), содержащий:
приемник, выполненный с возможностью выполнения измерения сигнала обслуживающей соты; и
процессор, выполненный с возможностью установки значения запаздывания обслуживающей соты на первое значение, если измерение сигнала обслуживающей соты превышает первый порог, установки значения запаздывания обслуживающей соты на второе значение, если измерение сигнала обслуживающей соты меньше, чем первый порог, и больше, чем второй порог, для первого интервала времени, установки значения запаздывания обслуживающей соты на третье значение, если измерение сигнала обслуживающей соты меньше, чем второй порог, для второго интервала времени, и регулировки критериев ранжирования обслуживающей соты на основе значения запаздывания обслуживающей соты после установки на одно из первого значения, второго значения и третьего значения.
24. WTRU варианта осуществления 23, в котором измерением сигнала обслуживающей соты является принятое качество эталонного символа (RSRQ), а первым и вторым порогами являются RSRQ пороги.
25. WTRU варианта осуществления 23, в котором измерением сигнала обслуживающей соты является принятая мощность кода символа (RSCP), а первым и вторым порогами являются RSCP пороги.
26. WTRU варианта осуществления 23, в котором измерением сигнала обслуживающей соты является принятая мощность эталонного сигнала (RSRP), а первым и вторым порогами являются RSRP пороги.
27. WTRU по любому из вариантов осуществления 23-26, в котором измерение сигнала обслуживающей соты используется для вычисления различных уровней скорости, ассоциированных с WTRU.
28. WTRU по любому из вариантов осуществления 23-27, в котором первое значение больше, чем второе значение, второе значение больше, чем третье значение, и первый порог больше, чем второй порог.
29. WTRU по любому из вариантов осуществления 23-28, в котором первое, второе и третье значения передаются сетью.
30. WTRU по любому из вариантов осуществления 23-29, в котором первое значение и по меньшей мере один коэффициент масштабирования передаются сетью, а второе и третье значения выводятся из первого значения с использованием по меньшей мере одного коэффициента масштабирования.
31. WTRU по любому из вариантов осуществления 23-30, дополнительно содержащий:
таймер повторного выбора, где значение времени таймера повторного выбора регулируется на основе того, как измерение сигнала сравнивается с первым и вторым порогами.
32. WTRU по любому из вариантов осуществления 23-31, в котором приемник дополнительно выполнен с возможностью принятия сообщения управления радиоресурсами (RRC), указывающего по меньшей мере одно из первого порога и второго порога.
33. WTRU по любому из вариантов осуществления 23-32, в котором приемник дополнительно выполнен с возможностью принятия сообщения управления радиоресурсами (RRC), указывающего по меньшей мере одно из первого значения, второго значения и третьего значения.
34. Блок беспроводной передачи/приема (WTRU), содержащий:
приемник, выполненный с возможностью выполнения измерения сигнала обслуживающей соты; и
процессор, выполненный с возможностью установки значения сдвига соседней соты на первое значение, если измерение сигнала обслуживающей соты превышает первый порог, установки значения сдвига соседней соты на второе значение, если измерение сигнала обслуживающей соты меньше, чем первый порог, и больше, чем второй порог, для первого интервала времени, установки значения сдвига соседней соты на третье значение, если измерение сигнала обслуживающей соты меньше, чем второй порог, для второго интервала времени; и регулировки критериев ранжирования соседней соты на основе значения сдвига соседней соты после установки на одно из первого значения, второго значения и третьего значения.
35. WTRU варианта осуществления 34, в котором измерением сигнала обслуживающей соты является принятое качество эталонного символа (RSRQ), а первым и вторым порогами являются RSRQ пороги.
36. WTRU варианта осуществления 34, в котором измерением сигнала обслуживающей соты является принятая мощность кода символа (RSCP), а первым и вторым порогами являются RSCP пороги.
37. WTRU варианта осуществления 34, в котором измерением сигнала обслуживающей соты является принятая мощность эталонного сигнала (RSRP), а первым и вторым порогами являются RSRP пороги.
38. WTRU по любому из вариантов осуществления 34-37, в котором измерение сигнала обслуживающей соты используется для вычисления различных уровней скорости, ассоциированных с WTRU.
39. WTRU по любому из вариантов осуществления 34-38, в котором первое значение больше, чем второе значение, второе значение больше, чем третье значение, и первый порог больше, чем второй порог.
40. WTRU по любому из вариантов осуществления 34-39, в котором первое, второе и третье значения передаются сетью.
41. WTRU по любому из вариантов осуществления 34-40, в котором первое значение и по меньшей мере один коэффициент масштабирования передаются сетью, а второе и третье значения выводятся из первого значения с использованием по меньшей мере одного коэффициента масштабирования.
42. WTRU по любому из вариантов осуществления 34-41, дополнительно содержащий:
таймер повторного выбора, где значение времени таймера повторного выбора регулируется на основе того, как измерение сигнала сравнивается с первым и вторым порогами.
43. WTRU по любому из вариантов осуществления 34-42, в котором приемник дополнительно выполнен с возможностью принятия сообщения управления радиоресурсами (RRC), указывающего по меньшей мере одно из первого порога и второго порога.
44. WTRU по любому из вариантов осуществления 34-43, в котором приемник дополнительно выполнен с возможностью принятия сообщения управления радиоресурсами (RRC), указывающего по меньшей мере одно из первого значения, второго значения и третьего значения.
45. Блок беспроводной передачи/приема (WTRU), содержащий:
таймер повторного выбора;
приемник, выполненный с возможностью измерения сигнала обслуживающей соты; и
процессор, выполненный с возможностью установки таймера повторного выбора на первое значение, если измерение сигнала обслуживающей соты превышает первый порог, установки таймера повторного выбора на второе значение, если измерение сигнала обслуживающей соты меньше, чем первый порог, и больше, чем второй порог, для первого интервала времени, и установки таймера повторного выбора на третье значение, если измерение сигнала обслуживающей соты меньше, чем второй порог, для второго интервала времени.
46. WTRU варианта осуществления 45, в котором измерением сигнала обслуживающей соты является принятое качество эталонного символа (RSRQ), а первым и вторым порогами являются RSRQ пороги.
47. WTRU варианта осуществления 45, в котором измерением сигнала обслуживающей соты является принятая мощность кода символа (RSCP), а первым и вторым порогами являются RSCP пороги.
48. WTRU варианта осуществления 45, в котором измерением сигнала обслуживающей соты является принятая мощность эталонного сигнала (RSRP), а первым и вторым порогами являются RSRP пороги.
49. WTRU по любому из вариантов осуществления 45-48, в котором измерение сигнала обслуживающей соты используется для вычисления различных уровней скорости, ассоциированных с WTRU.
50. WTRU по любому из вариантов осуществления 45-49, в котором первое значение больше, чем второе значение, второе значение больше, чем третье значение, и первый порог больше, чем второй порог.
51. WTRU по любому из вариантов осуществления 45-50, в котором первое, второе и третье значения передаются сетью.
52. WTRU по любому из вариантов осуществления 45-51, в котором первое значение и по меньшей мере один коэффициент масштабирования передаются сетью, а второе и третье значения выводятся из первого значения с использованием по меньшей мере одного коэффициента масштабирования.
53. WTRU по любому из вариантов осуществления 45-52, в котором приемник дополнительно выполнен с возможностью принятия сообщения управления радиоресурсами (RRC), указывающего по меньшей мере одно из первого порога и второго порога.
54. WTRU по любому из вариантов осуществления 45-53, в котором приемник дополнительно выполнен с возможностью принятия сообщения управления радиоресурсами (RRC), указывающего по меньшей мере одно из первого значения, второго значения и третьего значения.
55. Способ беспроводной связи регулировки критериев ранжирования обслуживающей соты, ассоциированной с блоком беспроводной передачи/приема (WTRU), причем этот способ предусматривает:
установку таймера повторного выбора в WTRU на первое значение;
установку значения запаздывания на второе значение;
контроль числа повторных выборов сот, ассоциированных с WTRU, которые имеют место в течение заданного периода времени;
контроль коэффициентов мобильности, ассоциированных с WTRU; и
если число повторных выборов сот превышает третье значение и детектирован высокий коэффициент мобильности, определение того, выполнить ли первую регулировку таймера повторного выбора посредством умножения первого значения на первый коэффициент масштабирования, выполнить ли вторую регулировку посредством умножения второго значения запаздывания на второй коэффициент масштабирования или выполнить ли обе из первой и второй регулировок для уменьшения ранжирования обслуживающей соты.
56. Способ варианта осуществления 55, в котором определение того, выполнить ли или нет обе из первой и второй регулировок, основано на условиях радиопередачи.
57. Способ по любому из вариантов осуществления 55 и 56, в котором первый коэффициент масштабирования является таким же, что и второй коэффициент масштабирования.
58. Способ по любому из вариантов осуществления 55 и 56, в котором первый коэффициент масштабирования отличается от второго коэффициента масштабирования.
59. Способ по любому из вариантов осуществления 55-58, в котором первое значение указывает время, для которого предполагается, что соседняя сота удовлетворяет критериям повторного выбора для WTRU.
60. Способ по любому из вариантов осуществления 55-59, дополнительно предусматривающий:
принятие сообщения управления радиоресурсами (RRC), указывающего по меньшей мере одно из первого коэффициента масштабирования и второго коэффициента масштабирования.
61. Блок беспроводной передачи/приема (WTRU), содержащий:
приемник, выполненный с возможностью контроля коэффициентов мобильности, ассоциированных с этим WTRU;
таймер повторного выбора; и
процессор, выполненный с возможностью контроля числа повторных выборов сот, ассоциированных с WTRU, которые имеют место в течение заданного периода времени, установки таймера повторного выбора на первое значение, установки значения запаздывания на второе значение и определения того, выполнить ли первую регулировку таймера повторного выбора посредством умножения первого значения на первый коэффициент масштабирования, выполнить ли вторую регулировку посредством умножения второго значения запаздывания на второй коэффициент масштабирования или выполнить обе из первой и второй регулировок для уменьшения ранжирования обслуживающей соты, если число повторных выборов сот превышает третье значение, и детектирован высокий коэффициент мобильности.
62. WTRU варианта осуществления 61, в котором определение того, выполнить ли или нет обе из первой и второй регулировок, основано на условиях радиопередачи.
63. WTRU по любому из вариантов осуществления 61 и 62, в котором первый коэффициент масштабирования является таким же, что и второй коэффициент масштабирования.
64. WTRU по любому из вариантов осуществления 61 и 62, в котором первый коэффициент масштабирования отличается от второго коэффициента масштабирования.
65. WTRU по любому из вариантов осуществления 61-64, в котором первое значение указывает время, для которого предполагается, что соседняя сота удовлетворяет критериям повторного выбора для WTRU.
66. WTRU по любому из вариантов осуществления 61-65, в котором приемник дополнительно выполнен с возможностью принятия сообщения управления радиоресурсами (RRC), указывающего по меньшей мере одно из первого коэффициента масштабирования и второго коэффициента масштабирования.
67. Способ сообщения измерения сигнала соты, выполняемый блоком беспроводной передачи/приема (WTRU), причем этот способ предусматривает:
выполнение измерения сигнала обслуживающей соты;
выполнение измерения сигнала соседней соты;
запуск интервала времени запуска (ТТТ), когда измерение сигнала соседней соты повышается выше порога диапазона сообщения; и
если измерение сигнала обслуживающей соты падает ниже порога обслуживающей соты, регулировку ТТТ интервала и передачу отчета об измерении перед истечением ТТТ интервала, сообщающего о том, что измерение сигнала обслуживающей соты упало ниже порога обслуживающей соты, и обеспечивающего информацию о соседней соте, используемую для генерации команды хэндовера.
68. Способ варианта осуществления 67, в котором измерение сигнала обслуживающей соты используется для вычисления различных уровней скорости, ассоциированных с WTRU.
69. Способ по любому из вариантов осуществления 67 и 68, в котором команда хэндовера связана по меньшей мере с одним из внутричастотного хэндовера, межчастотного хэндовера и хэндовера технологии взаимного радиодоступа (inter-RAT).
70. Способ сообщения измерения сигнала соты, выполняемый блоком беспроводной передачи/приема (WTRU), причем этот способ предусматривает:
выполнение измерения сигнала обслуживающей соты;
выполнение измерения сигнала соседней соты;
запуск интервала времени запуска (ТТТ), когда измерение сигнала соседней соты повышается выше порога диапазона сообщения; и
если измерение сигнала обслуживающей соты падает ниже порога обслуживающей соты и остается ниже этого порога в течение заданного интервала времени, регулировку ТТТ интервала и передачу отчета об измерении в течение ТТТ интервала, сообщающего о том, что измерение сигнала обслуживающей соты упало ниже порога обслуживающей соты, и обеспечивающего информацию о соседней соте, используемую для генерации команды хэндовера.
71. Способ варианта осуществления 70, в котором измерение сигнала обслуживающей соты используется для вычисления различных уровней скорости, ассоциированных с WTRU.
72. Способ по любому из вариантов осуществления 70 и 71, в котором команда хэндовера связана по меньшей мере с одним из внутричастотного хэндовера, межчастотного хэндовера и хэндовера технологии взаимного радиодоступа (inter-RAT).
73. Блок беспроводной передачи/приема (WTRU), содержащий:
приемник, выполненный с возможностью выполнения измерения сигнала обслуживающей соты и измерения сигнала соседней соты;
таймер времени запуска (ТТТ);
процессор, выполненный с возможностью запуска ТТТ интервала, установленного ТТТ таймером, когда измерение сигнала соседней соты повышается выше порога диапазона сообщения, и регулировки ТТТ интервала; и
передатчик, выполненный с возможностью передачи отчета об измерении перед истечением ТТТ интервала, если измерение сигнала обслуживающей соты падает ниже порога обслуживающей соты, причем этот отчет об измерении указывает, что измерение сигнала обслуживающей соты упало ниже порога обслуживающей соты, и обеспечивает информацию о соседней соте, используемую для генерации команды хэндовера.
74. WTRU варианта осуществления 73, в котором измерение сигнала обслуживающей соты используется для вычисления различных уровней скорости, ассоциированных с WTRU.
75. Способ по любому из вариантов осуществления 73 и 74, в котором команда хэндовера связана по меньшей мере с одним из внутричастотного хэндовера, межчастотного хэндовера и хэндовера технологии взаимного радиодоступа (inter-RAT).
76. Блок беспроводной передачи/приема (WTRU), содержащий:
приемник, выполненный с возможностью выполнения измерения сигнала обслуживающей соты и измерения сигнала соседней соты;
таймер времени запуска (ТТТ); и
процессор, выполненный с возможностью запуска ТТТ интервала, установленного ТТТ таймером, когда измерение сигнала соседней соты повышается выше порога диапазона сообщения, и регулировки ТТТ интервала; и
передатчик, выполненный с возможностью передачи отчета об измерении в течение ТТТ интервала, если измерение сигнала обслуживающей соты падает ниже порога обслуживающей соты и остается ниже этого порога в течение заданного интервала времени, причем этот отчет об измерении указывает, что измерение сигнала обслуживающей соты упало ниже порога обслуживающей соты, и обеспечивает информацию о соседней соте, используемую для генерации команды хэндовера.
77. WTRU варианта осуществления 76, в котором измерение сигнала обслуживающей соты используется для вычисления различных уровней скорости, ассоциированных с WTRU.
78. Способ по любому из вариантов осуществления 76 и 77, в котором команда хэндовера связана по меньшей мере с одним из внутричастотного хэндовера, межчастотного хэндовера и хэндовера технологии взаимного радиодоступа (inter-RAT).
79. Способ беспроводной связи регулировки критериев ранжирования обслуживающей соты, ассоциированной с блоком беспроводной передачи/приема (WTRU), причем этот способ предусматривает:
установление множества порогов;
выполнение измерения сигнала обслуживающей соты;
установку значения запаздывания на конкретное значение, которое зависит от того, как измерение сигнала обслуживающей соты сравнивается со множеством порогов; и
регулировку критериев ранжирования обслуживающей соты на основе значения запаздывания после установки на конкретное значение.
80. Способ варианта осуществления 79, в котором измерением сигнала обслуживающей соты является принятое качество эталонного символа (RSRQ).
81. Способ варианта осуществления 79, в котором измерением сигнала обслуживающей соты является принятая мощность кода сигнала (RSCP).
82. Способ варианта осуществления 79, в котором измерением сигнала обслуживающей соты является принятая мощность эталонного сигнала (RSRP).
83. Способ по любому из вариантов осуществления 79-82, в котором измерение сигнала обслуживающей соты используется для вычисления различных уровней скорости, ассоциированных с WTRU.
84. Способ беспроводной связи регулировки таймера повторного выбора в блоке беспроводной передачи/приема (WTRU), причем этот способ предусматривает:
установление множества порогов;
выполнение измерения сигнала обслуживающей соты; и
регулировку таймера повторного выбора на основе того, как измерение сигнала обслуживающей соты сравнивается со множеством порогов.
85. Способ варианта осуществления 84, в котором измерением сигнала обслуживающей соты является принятое качество эталонного символа (RSRQ).
86. Способ варианта осуществления 84, в котором измерением сигнала обслуживающей соты является принятая мощность кода сигнала (RSCP).
87. Способ варианта осуществления 84, в котором измерением сигнала обслуживающей соты является принятая мощность эталонного сигнала (RSRP).
88. Способ по любому из вариантов осуществления 84-87, в котором измерение сигнала обслуживающей соты используется для вычисления различных уровней скорости, ассоциированных с WTRU.
89. Способ беспроводной связи регулировки критериев ранжирования соседней соты, ассоциированной с блоком беспроводной передачи/приема (WTRU), причем этот способ предусматривает:
установление множества порогов;
выполнение измерения сигнала обслуживающей соты;
установку значения сдвига соседней соты на конкретное значение, которое зависит от того, как измерение сигнала обслуживающей соты сравнивается с множеством порогов; и
регулировку критериев ранжирования соседней соты на основе значения сдвига соседней соты после установки на конкретное значение.
90. Способ варианта осуществления 89, в котором измерением сигнала обслуживающей соты является принятое качество эталонного символа (RSRQ).
91. Способ варианта осуществления 89, в котором измерением сигнала обслуживающей соты является принятая мощность кода сигнала (RSCP).
92. Способ варианта осуществления 89, в котором измерением сигнала обслуживающей соты является принятая мощность эталонного сигнала (RSRP).
93. Способ по любому из вариантов осуществления 89-92, в котором измерение сигнала обслуживающей соты используется для вычисления различных уровней скорости, ассоциированных с WTRU.
94. Способ беспроводной связи регулировки таймера повторного выбора в блоке беспроводной передачи/приема (WTRU), причем этот способ предусматривает:
установление множества порогов;
выполнение измерения сигнала обслуживающей соты; и
регулировку таймера повторного выбора на основе того, как измерение сигнала обслуживающей соты сравнивается с множеством порогов.
95. Способ варианта осуществления 94, в котором измерением сигнала обслуживающей соты является принятое качество эталонного символа (RSRQ).
96. Способ варианта осуществления 94, в котором измерением сигнала обслуживающей соты является принятая мощность кода сигнала (RSCP).
97. Способ варианта осуществления 94, в котором измерением сигнала обслуживающей соты является принятая мощность эталонного сигнала (RSRP).
98. Способ по любому из вариантов осуществления 94-97, в котором измерение сигнала обслуживающей соты используется для вычисления различных уровней скорости, ассоциированных с WTRU.
Хотя особенности и элементы описаны выше в конкретных комбинациях, каждая особенность или элемент может использоваться в отдельности без других особенностей и элементов или в различных комбинациях с другими особенностями и элементами или без них. Способы или блок-схемы, обеспеченные здесь, могут быть реализованы в компьютерной программе, программном обеспечении или программно-аппаратных средствах, заключенных в считываемом компьютером носителе данных для выполнения универсальным компьютером или процессором. Примеры считываемых компьютером носителей данных включают в себя ПЗУ (ROM), ЗУПВ (RAM), регистр, кэш-память, полупроводниковое ЗУ, магнитные носители, такие как внутренние жесткие диски и съемные диски, магнитно-оптические носители и оптические носители, такие как компакт-диски и цифровые универсальные диски (DVD).
Соответствующие процессоры включают в себя, в качестве примера, универсальный процессор, специализированный процессор, стандартный процессор, процессор цифровых сигналов (DSP), множество микропроцессоров, один или несколько микропроцессоров в связи с DSP-ядром, контроллер, микроконтроллер, интегральные схемы прикладной ориентации (ASIC), схемы программируемых пользователем вентильных матриц (FPGA), любой другой тип интегральной схемы (IC) и/или конечный автомат.
Процессор в связи с программным обеспечением может использоваться для реализации радиочастотного трансивера для использования в блоке беспроводной передачи/приема (WTRU), оборудовании пользователя (UE), терминале, базовой станции, контроллере радиосети (RNC) или любом хост-компьютере. WTRU может использоваться в сопряжении с модулями, реализованными в аппаратном обеспечении и/или программном обеспечении, таком как камера, модуль видеокамеры, видеотелефон, спикерфон, вибрационное устройство, громкоговоритель, микрофон, телевизионный трансивер, автоматическая телефонная трубка, клавиатура, Bluetooth® модуль, модулируемый по частоте (FM) радиоблок, жидкокристаллический дисплей (LCD), дисплей на органических светоизлучающих диодах (OLED), цифровой музыкальный проигрыватель, медиаплейер, модуль проигрывателя видеоигр, Интернет-браузер и/или любая беспроводная локальная вычислительная сеть (WLAN) или сверхширокополосный (UWB) модуль.
Описаны различные способы регулировки таймера повторного выбора и критериев ранжирования сот. Техническим результатом является создание более надежной схемы хэндовера. Для этого критерии ранжирования обслуживающей или соседней соты или таймер повторного выбора в блоке беспроводной передачи/приема (WTRU) регулируются на основе того, как измерение сигнала обслуживающей соты (например, уровень сигнала, качество сигнала) сравнивается с множеством порогов на некотором интервале времени. В другом способе критерии ранжирования сот регулируются на основе значения запаздывания и коэффициента масштабирования, когда максимальное число повторных выборов превышено и детектирован высокий коэффициент мобильности. Кроме того, описан способ сообщения измерений сигналов сот, посредством которого интервал времени запуска (ТТТ) запускается, когда измерение сигнала соседней соты повышается выше порога диапазона отчета. Если измерение сигнала обслуживающей соты падает ниже порога обслуживающей соты, то ТТТ интервал регулируется, и, таким образом, отчет об измерении передается в течение этого ТТТ интервала. 2 н. и 12 з.п. ф-лы, 10 ил.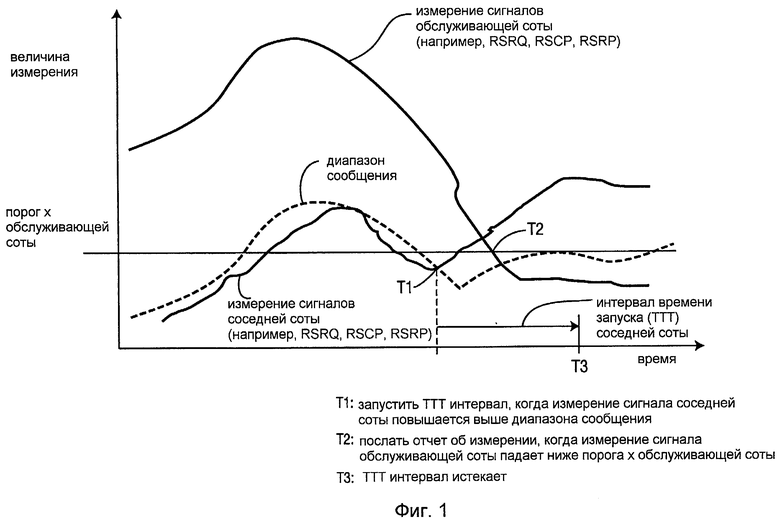
1. Блок беспроводной передачи/приема (WTRU), содержащий:
процессор, выполненный с возможностью:
определения измеренного числа повторных выборов сот;
масштабирования значения запаздывания обслуживающей соты посредством первого значения в ответ на определение того, что измеренное число повторных выборов сот превышает первое заданное число повторных выборов сот; и
масштабирования значения запаздывания обслуживающей соты посредством второго значения в ответ на определение того, что измеренное число повторных выборов сот не превышает первое заданное число повторных выборов сот и того, что измеренное число повторных выборов сот превышает второе заданное число повторных выборов сот.
2. Блок по п.1, в котором процессор дополнительно выполнен с возможностью не масштабирования значения запаздывания обслуживающей соты в ответ на определение того, что измеренное число повторных выборов сот не превышает второе заданное число повторных выборов сот.
3. Блок по п.1, в котором процессор дополнительно выполнен с возможностью масштабирования значения запаздывания обслуживающей соты посредством третьего значения в ответ на определение того, что измеренное число повторных выборов сот не превышает второе заданное число повторных выборов сот.
4. Блок по п.1, в котором процессор дополнительно выполнен с возможностью регулировки критериев ранжирования обслуживающей соты на основе масштабирования значения запаздывания обслуживающей соты посредством первого значения или второго значения.
5. Блок по п.2, в котором процессор дополнительно выполнен с возможностью регулировки критериев ранжирования обслуживающей соты на основе не масштабирования значения запаздывания обслуживающей соты.
6. Блок по п.3, в котором процессор дополнительно выполнен с возможностью регулировки критериев ранжирования обслуживающей соты на основе масштабирования значения запаздывания обслуживающей соты посредством третьего значения.
7. Блок по п.1, в котором процессор дополнительно выполнен с возможностью определения состояния высокой мобильности в ответ на определение того, что измеренное число повторных выборов сот превышает первое заданное число повторных выборов сот.
8. Блок по п.1, в котором процессор дополнительно выполнен с возможностью определения состояния средней мобильности в ответ на определение того, что измеренное число повторных выборов сот не превышает первое заданное число повторных выборов сот и того, что измеренное число повторных выборов сот превышает второе заданное число повторных выборов сот.
9. Способ масштабирования значения запаздывания обслуживающей соты, выполняемый в блоке беспроводной передачи/приема (WTRU), причем способ предусматривает:
определение измеренного числа повторных выборов сот;
масштабирование значения запаздывания обслуживающей соты посредством первого значения в ответ на определение того, что измеренное число повторных выборов сот превышает первое заданное число повторных выборов сот; и
масштабирование значения запаздывания обслуживающей соты посредством второго значения в ответ на определение того, что измеренное число повторных выборов сот не превышает первое заданное число повторных выборов сот и того, что измеренное число повторных выборов сот превышает второе заданное число повторных выборов сот.
10. Способ по п.9, дополнительно предусматривающий масштабирование значения запаздывания обслуживающей соты посредством третьего значения в ответ на определение того, что измеренное число повторных выборов сот не превышает второе заданное число повторных выборов сот.
11. Способ по п.9, дополнительно предусматривающий регулировку критериев ранжирования обслуживающей соты на основе масштабирования значения запаздывания обслуживающей соты посредством первого значения или второго значения.
12. Способ по п.9, дополнительно предусматривающий регулировку критериев ранжирования обслуживающей соты на основе масштабирования значения запаздывания обслуживающей соты посредством третьего значения.
13. Способ по п.9, дополнительно предусматривающий вхождение в состояние высокой мобильности в ответ на определение того, что измеренное число повторных выборов сот превышает первое заданное число повторных выборов сот.
14. Способ по п.9, дополнительно предусматривающий вхождение в состояние средней мобильности в ответ на определение того, что измеренное число повторных выборов сот не превышает первое заданное число повторных выборов сот и того, что измеренное число повторных выборов сот превышает второе заданное число повторных выборов сот.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ПОВТОРНОГО ВЫБОРА ЯЧЕЕК ДЛЯ ПОДДЕРЖАНИЯ ЭФФЕКТИВНЫХ ИЕРАРХИЧЕСКИХ СТРУКТУР ЯЧЕЕК | 2000 |
|
RU2265287C2 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

