Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству, в котором механизм измерения нагрузки весового аппарата испытывает нагрузку от веса, встроенного в весовой аппарат, или механизм измерения нагрузки не испытывает нагрузку от этого веса вследствие удержания нагрузки этого веса, в частности к устройству, которое должным образом объединено с весовым аппаратом, который в собирательном значении называется электронными весами.
Предшествующий уровень техники
Поскольку электронные весы, такие как электромагнитные весы балансного типа, имеют высокие характеристики и большое разрешение, эти электромагнитные весы имеют склонность к высокой зависимости от того окружения, в которое эти электромагнитные весы как весовой аппарат помещены.
Например, изменение во взвешиваемой величине электромагнитных весов порождается слабым изменением физических условий, таких как географическая широта местонахождения аппарата, окружающая температура в месте его нахождения, изменение атмосферного давления или лунного притяжения, вызванное движением Луны, а также изменение гравитационного поля, обусловленное земными характеристиками, которые в обычной окружающей жизни могут в основном игнорироваться. Что касается изменения ускорения силы тяжести, то известно, что в Японии изменение ускорения силы тяжести составляет около 1/1000.
Поэтому в высокоточных моделях, таких как высококачественный электромагнитный весовой аппарат балансного типа, называемый аналитическими весами, имеющий разрешение, превышающее 1/106, а также в моделях, называемых весами общего назначения, имеющих разрешение около 1/105, внутри аппарата почти всегда встроен калибровочный вес, весовым аппаратом проводится калибровка, и им всегда могут быть произведены правильные измерения, даже если в окружающих физических условиях в месте нахождения аппарата произошли изменения.
Фиг.8 концептуально иллюстрирует способ выполнения калибровки в электромагнитном весовом аппарате балансного типа с использованием встроенного веса. В весовом аппарате вес W измеренного образца, нагруженный на чашку 50, передается на его электромагнитную часть 53 посредством коромысла 52, управляемого механизмом Roverbal, включающим в себя верхнее и нижнее вспомогательные коромысла 51а и 51b, на электромагнитную часть 53 подается такой электрический сигнал, который бы уравновесил величину смещения этой электромагнитной части 53, и на основании величины этого электрического сигнала определяется вес W образца.
Как описано выше, поскольку взвешиваемая величина, возможно, изменилась под действием изменения условий окружающей среды в месте нахождения аппарата, в электромагнитном весовом аппарате балансного типа периодически или соответствующими переключениями переключателя, которые выполняет пользователь, на часть 55 приемника нагрузки от встроенного веса механизма измерения нагрузки загружается встроенный вес 54 с точно определенной массой для проведения калибровки весового аппарата, так что при этом взвешиваемая величина встроенного веса сравнивается с массой встроенного веса.
Весовой аппарат, имеющий встроенный вес, имеет механизм, который загружает этот встроенный вес на механизм измерения нагрузки или поднимает загруженный встроенный вес, чтобы привести механизм измерения нагрузки в ненагруженное состояние (далее по тексту эти операции называются "приложение" и "удаление" встроенного веса). Поэтому периодически автоматически с помощью таймера или переключениями переключателя весового аппарата, которые выполняет пользователь, производится соответствующая калибровка. В перечисленных ниже патентных документах раскрывается механизм приложения и удаления (подъема и опускания) встроенного веса, который загружает и удаляет встроенный вес во время проведения калибровки.
Патентный документ 1: Выложенная патентная заявка Японии №2001-221682
Патентный документ 2: Выложенная патентная заявка Японии №11-160141
Патентный документ 3: Выложенная патентная заявка Японии №2000-097756
Патентный документ 4: Выложенная патентная заявка Японии №2000-121423
Патентный документ 5: Патент Японии на полезную модель № 2506662
Патентный документ 6: Патент США №7012198
Патентный документ 7: Патент США №5148881
Патентный документ 8: Патент США №4766965
Описание изобретения
Задача, решаемая настоящим изобретением
Во всех вышеуказанных патентных документах при прикладывании встроенного веса к механизму измерения нагрузки и удалении его с этого механизма нагрузка встроенного веса поднимается и опускается по отношению к приемнику нагрузки от встроенного веса измерительного механизма, в соответствии с чем встроенный вес загружается при опускании, а при подъеме ненагруженное состояние восстанавливается.
В механизмах, раскрытых в этих патентных документах, для того чтобы осуществить эту операцию, с помощью кулачка производится преобразование вращательного перемещения электродвигателя в линейное, или же какой-либо подвижный элемент выполняет линейное перемещение для подъема и опускания встроенного веса с помощью вращающегося винта.
В конфигурациях в соответствии с патентными документами в операции по подъему и опусканию встроенного веса необходимы элемент, который выполняет вращательное перемещение, и элемент, который преобразует вращательное перемещение в линейное. Поэтому между этими элементами необходим контакт и процесс взаимного скольжения. К сожалению, контакт и процесс скольжения со временем вызывает истирание элементов, истирание увеличивает сопротивление трения, вследствие повышенного сопротивления трения увеличивается нагрузка на электродвигатель, что вызывает генерацию тепла и разрушение зубчатого узла или приводного механизма электродвигателя. Неисправности относительно часто возникают в весовых аппаратах. Поэтому проверку и настройку весовых аппаратов необходимо проводить через относительно короткие периоды.
С ростом количества компонентов система передачи электропитания становится сложной, и поэтому весовые аппараты неизбежно увеличиваются и усложняются. В последнее время выявилась сильная потребность в миниатюризации и уменьшении высоты весовых аппаратов, и обычный механизм прикладывания и удаления встроенного веса с трудом соответствует этому спросу.
Средства для решения проблемы
Настоящее изобретение было сделано, имея в виду такие обстоятельства.
В механизме, раскрытом в указанных патентных документах, встроенный вес опускается и поднимается линейным перемещением подвижного элемента вращающимся винтом или последовательностью операций, производимых кулачком и элементом, который выполняет линейное перемещение в соответствии с вращением этого кулачка. С другой стороны, устройство подъема и опускания встроенного веса в соответствии с объектом настоящего изобретения отличается тем, что в качестве приводного тела, которое выполняет операции подъема и опускания встроенного веса, типичным примером которого является воздушный мешок, используется контейнер переменного объема, а встроенный вес опускается и поднимается непосредственно изменением объема приводного тела в соответствии с изменением объема приводного тела изменяемого объема, или же встроенный вес опускается и поднимается опосредованно с использованием простого механизма преобразования, такого как рычаг.
Технический результат изобретения
Поскольку в устройстве подъема и опускания встроенного веса в соответствии с вариантом настоящего изобретения вращающийся кулачок и элемент, который входит с ним в контакт и скользит по кулачку, исключены, обеспечивается преимущество, заключающееся в том, что не происходит временного истирания компонентов при их контакте и в процессе скольжения, сопротивление трения истиранием не увеличивается, увеличением нагрузки электродвигателя вследствие повышенного сопротивления трения не вызывается генерация тепла в электродвигателе, и разрушения зубчатого узла или приводного механизма электродвигателя не происходит. Таким образом, можно использовать высоконадежный весовой аппарат, почти не требующий технического обслуживания.
Ранее круг пользователей весового аппарата, имеющего встроенный вес, ограничивался государственными исследовательскими лабораториями и институтами частных компаний или университетов, а сам пользователь обладал довольно высокой компетентностью в весовых аппаратах. Однако, с недавних пор встроенный вес стал часто монтироваться в весах общего назначения, устанавливаемых в производственных линиях, а также во взвешивающей аппаратуре, используемой в образовательных учреждениях, в которых требуются относительно недорогие весовые аппараты. Повышение надежности механизма становится важным особенно в тех производственных линиях, в которых весовые аппараты используются часто, а потому для достижения широко распространенного использования электронных весов в ближайшем будущем необходимы преимущественные отличия, присущие устройству подъема и опускания встроенного веса в соответствии с объектом настоящего изобретения.
Более подробно, в обычных устройствах, раскрытых в патентных документах, в качестве приводного устройства часто используется редукторный электродвигатель. В электродвигателе малого размера плотность входной электрической энергии уменьшается, и крутящий момент при вращении его с малой скоростью не достаточен для привода механизма подъема и опускания встроенного веса. Поэтому в качестве приводного устройства используется дорогостоящий редукторный электродвигатель, в котором применяется подверженная неисправностям планетарная передача, электродвигатель вращается на большой скорости, а для увеличения крутящего момента количество оборотов уменьшается редуктором. С другой стороны, в устройстве подъема и опускания встроенного веса в соответствии с объектом настоящего изобретения используется приводное тело изменяемого объема, имеющее чрезвычайно простое устройство, а дорогостоящий компонент, такой как редукторный электродвигатель, интенсивность отказов которого относительно высока, исключен, так что этот механизм может производиться по низкой себестоимости, при том, что его надежность повышена.
Краткое описание чертежей
Фиг.1 представляет собой продольное сечение, показывающее устройство подъема и опускания встроенного веса в соответствии с первым вариантом исполнения настоящего изобретения, а также сечение, выполненное по линии А-А фиг.2.
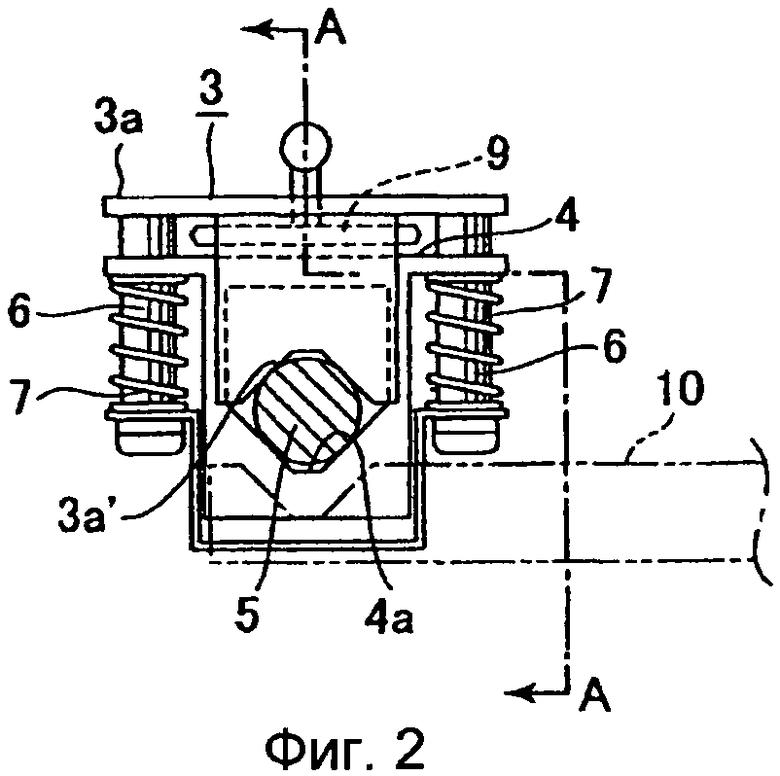
Фиг.2 представляет собой сечение, показывающее устройство подъема и опускания встроенного веса со стороны, перпендикулярной центральной оси встроенного веса.
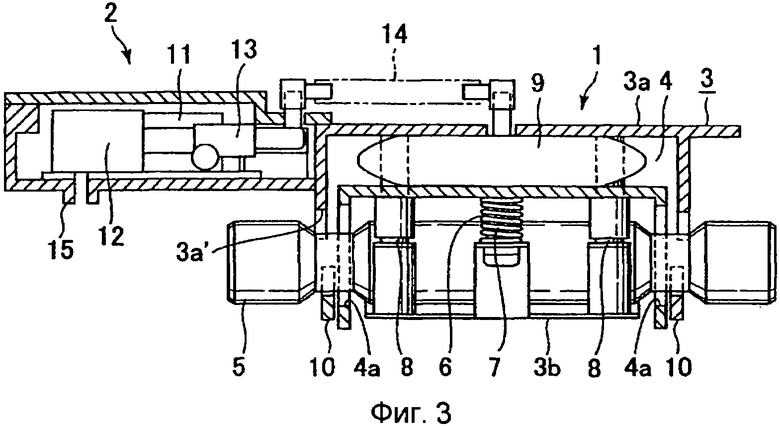
Фиг.3 представляет собой продольное сечение, показывающее устройство подъема и опускания встроенного веса при максимально увеличенном объеме воздушного мешка.
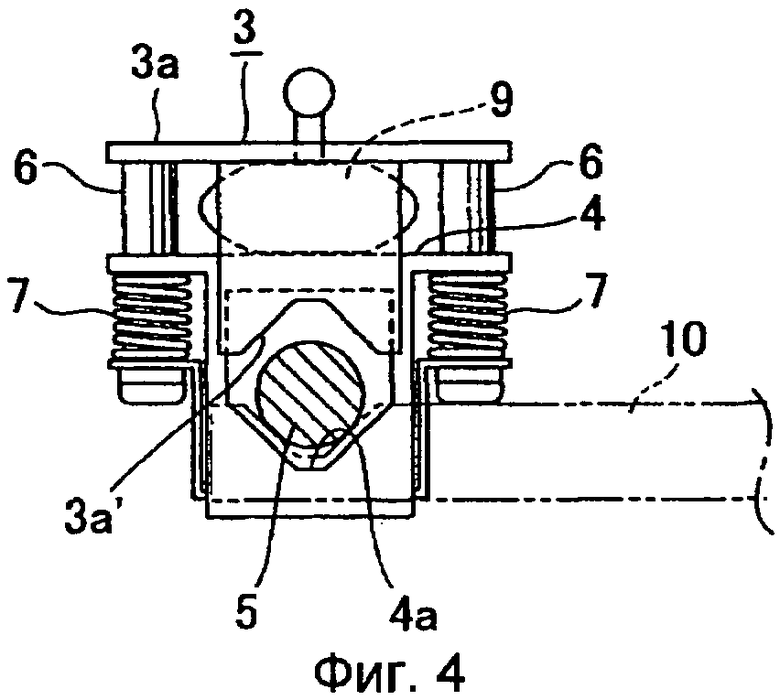
Фиг.4 представляет собой сечение, показывающее устройство подъема и опускания встроенного веса со стороны, перпендикулярной центральной оси встроенного веса в положении по фиг.3.
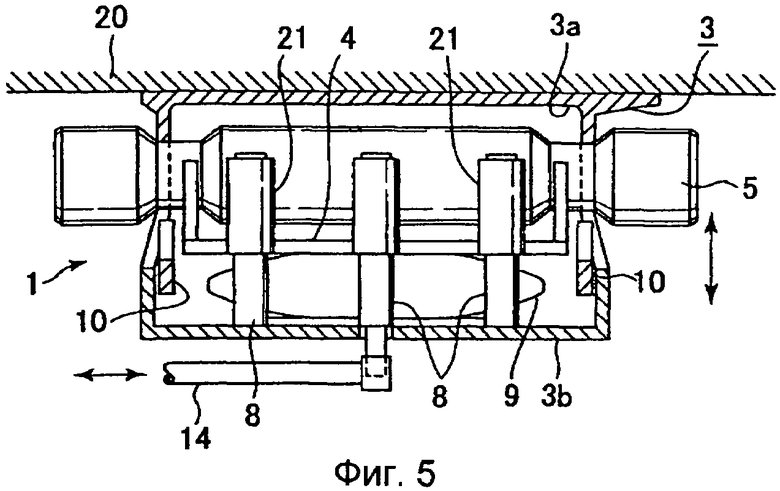
Фиг.5 представляет собой продольное сечение, показывающее устройство подъема и опускания встроенного веса в соответствии со вторым вариантом исполнения настоящего изобретения.
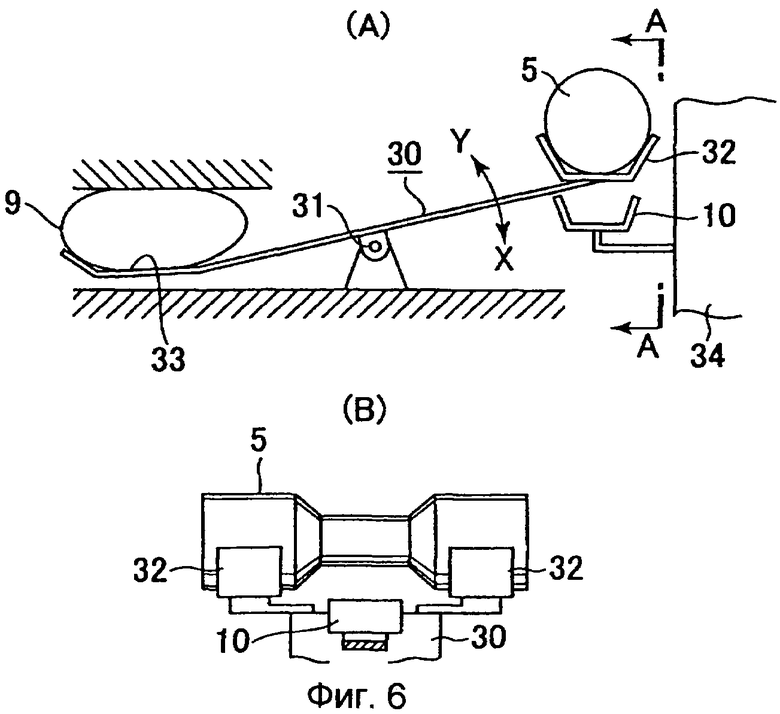
Фиг.6 показывает устройство подъема и опускания встроенного веса в соответствии с третьим вариантом исполнения настоящего изобретения, где фиг.6(А) - вид сбоку, показывающий устройство подъема и опускания встроенного веса, в котором используется рычажный механизм, а фиг.6(В) - вид по линии А-А фиг.6(А).
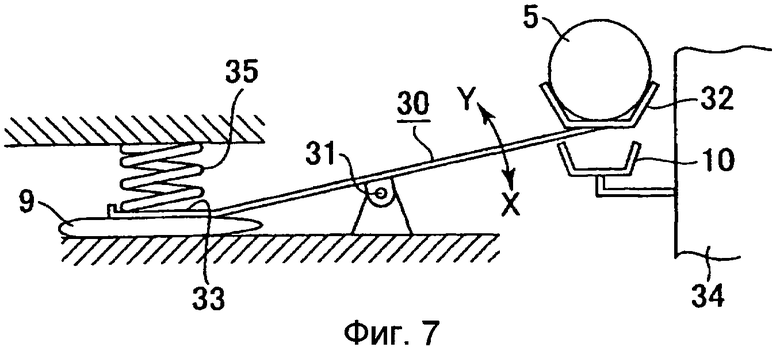
Фиг.7 представляет собой вид сбоку, показывающий устройство подъема и опускания встроенного веса в соответствии с четвертым вариантом исполнения настоящего изобретения, в котором используется рычажный механизм.
Фиг.8 представляет собой схематичный вид, иллюстрирующий состояние, в котором производится нагрузка встроенного веса на электромагнитный весовой аппарат балансного типа или его удаление.
Перечень ссылочных позиций
1 - узел механизма подъема и опускания встроенного веса;
2 - узел подачи и выпуска воздуха;
3 - фиксированная часть;
3а - верхняя фиксированная часть;
3а′ - запорный участок (верхней фиксированной части);
3b - нижняя фиксированная часть;
4 - держатель веса;
4а - запорный участок (держателя веса);
5 - встроенный вес;
6 - приводной штырь;
7 - винтовая пружина;
8 - направляющий штырь;
9 - воздушный мешок (приводной контейнер);
10 - приемник груза (на плече механизма измерения нагрузки);
11 - воздушный насос (с приводом от двойного электродвигателя наддува);
12 - электромагнитный клапан;
13 - воздушный фильтр;
14 - воздушная трубка;
15 - выпускное отверстие;
20 - верхний корпус (весового аппарата);
21 - направляющий цилиндр направляющего штыря;
30 - рычажный механизм;
31 - точка опоры рычажного механизма;
32 - держатель веса;
33 - участок точки усилия (рычажного механизма);
34 - механизм измерения нагрузки (электронных весов);
35 - винтовая пружина.
Предпочтительные варианты исполнения изобретения
Присутствуют упругий элемент, поджатый в направлении подъема держателя относительно держателя веса, который непосредственно поднимает и опускает встроенный вес, и воздушный мешок, который расположен в пространстве между держателем веса и фиксированным элементом, выполненный с возможностью изменения объема, воздушный мешок связан со средством подачи и выпуска воздуха, держатель веса увеличением объема воздушного мешка опущен против возвратной силы упругого элемента, а механизм измерения нагрузки испытывает нагрузку встроенного веса. При испускании воздуха из воздушного мешка объем воздуха воздушного мешка уменьшается. Поэтому возвратная сила упругого элемента восстанавливается, держатель веса возвратной силой поднимается вверх, плечо механизма измерения нагрузки не испытывает нагрузки от встроенного веса, и далее это ненагруженное состояние, при котором весовой аппарат может работать в обычном режиме измерений, сохраняется.
Первый вариант исполнения
Далее в качестве примеров со ссылками на чертежи будут описаны варианты исполнения настоящего изобретения.
Фиг.1-4 иллюстрируют устройство подъема и опускания встроенного веса в соответствии с первым вариантом исполнения настоящего изобретения, а также иллюстрируют механизм подъема и опускания прямого типа, в котором встроенный вес поднимается и опускается непосредственно воздушным мешком. Фиг.1 и 2 показывают состояние, при котором встроенный вес поднят в устройстве подъема и опускания встроенного веса по первому варианту исполнения, то есть состояние, в котором механизм измерения нагрузки весового аппарата не имеет нагрузки от встроенного веса.
Устройство подъема и опускания встроенного веса в соответствии с первым вариантом исполнения включает в себя узел 1 механизма подъема и опускания встроенного веса и узел 2 подачи и выпуска воздуха. Узел 1 механизма подъема и опускания встроенного веса непосредственно поднимает и опускает встроенный вес. Узел 2 подачи и выпуска воздуха для выполнения операций подъема и опускания встроенного веса подает воздух в узел 1 механизма подъема и опускания встроенного веса и выпускает из него поданный воздух.
Далее будет описана конфигурация узла 1 механизма подъема и опускания встроенного веса.
Позиция 3 обозначает фиксированную часть, то есть раму узла 1 механизма подъема и опускания встроенного веса. Устройство подъема и опускания встроенного веса прикреплено к основному корпусу весового аппарата, причем фиксированная часть 3 расположена между ними, а каждый элемент, составляющий узел 1 механизма подъема и опускания встроенного веса, прямо или косвенно связан с фиксированной частью 3. Позиция 3а обозначает верхнюю фиксированную часть, а позиция 3b обозначает нижнюю фиксированную часть, которая соединена с верхней фиксированной частью 3а.
Позиция 4 обозначает держатель, который удерживает встроенный вес 5 (далее называемый "держатель веса"). Держатель веса 4 может быть поднят или опущен по отношению к фиксированной части 3 следующим механизмом.
Позиция 6 обозначает штырь, нижний конец которого прикреплен к боковому элементу нижней фиксированной части 3b, а верхний конец которого прикреплен к верхней фиксированной части 3а. Имеется также винтовая пружина 7, то есть упругий элемент, и в эту винтовую пружину 7 вставлен штырь 6. Винтовая пружина 7 расположена между нижним концом штыря 6 и нижней поверхностью держателя веса 4. Поэтому держатель веса 4 поджат возвратной силой винтовой пружины 7 в сторону верхней фиксированной части 3а, то есть в направлении подъема.
Как и в штыре 6, нижний конец штыря 8 прикреплен к стороне нижней фиксированной части 3b, а верхний конец прикреплен к верхней фиксированной части 3а. Однако на штыре 8 нет винтовой пружины, и штырь 8 действует как направляющая, которая направляет операции подъема и опускания держателя веса 4. Основываясь на функциях каждого из этих штырей, далее штырь 6 называется приводным штырем, а штырь 8 называется направляющим штырем. В конфигурации по фиг.1 и фиг.2 только один центральный штырь действует как приводной штырь. Альтернативно, когда винтовые пружины установлены и на правом, и на левом направляющих штырях 8, очевидно, что направляющий штырь 8 может действовать как приводной штырь.
Позиция 9 обозначает воздухонепроницаемый контейнер (далее называемый "воздушный мешок"), объем которого изменяется вдуванием и выпусканием воздуха. Воздушный мешок 9 расположен в пространстве между верхней фиксированной частью 3а и держателем веса 4. На фиг.1 и фиг.2 воздух из воздушного мешка 9 выпущен, и воздушный мешок 9 имеет минимальный объем.
Когда воздушный мешок 9 находится в состоянии своего минимального объема, держатель веса 4 расположен в самой верхнем положении под действием возвратной силы винтовой пружины 7. В этот момент встроенный вес 5 занимает промежуточное положение между запорным участком 3а′ верхней фиксированной части 3а и запорным участком 4а держателя веса, и этот встроенный вес 5 надежно зафиксирован в поднятом положении. Поскольку встроенный вес 5 зафиксирован, этот встроенный вес 5 не смещается даже в случае перемещения или транспортирования весового аппарата.
В нижней части узла 1 механизма подъема и опускания встроенного веса расположен приемник груза 10, он передает нагрузку от встроенного веса 5 на механизм измерения нагрузки (не показан) весового аппарата. Приемник груза 10 соответствует части 55 приемника нагрузки от встроенного веса на фиг.8.
Далее будет описана конфигурация узла 2 подачи и выпуска воздуха.
Позиция 11 обозначает воздушный насос, в котором в качестве приводного механизма используется двойной электродвигатель наддува, позицией 12 обозначен электромагнитный клапан, который используется для выпуска воздуха, а позиция 13 обозначает воздушный фильтр. В конфигурации по фиг.1 и фиг.3 узел 2 подачи и выпуска воздуха скреплен с узлом 1 механизма подъема и опускания встроенного веса, тем самым образуя единый аппарат в целом.
Теперь будет описано активирующее состояние устройство подъема и опускания встроенного веса, имеющего вышеописанную конфигурацию.
Когда весовой аппарат, на котором установлено устройство подъема и опускания встроенного веса, находится в режиме обычного взвешивания, объем воздушного мешка 9 становится минимальным, как показано на фиг.1 и 2, и поэтому встроенный вес 5 расположен в самом верхнем положении, так что механизм измерения нагрузки весового аппарата нагрузки от встроенного веса 5 не имеет.
В тех случаях, когда весовой аппарат калибруется с использованием встроенного веса, включается воздушный насос 11 узла 2 подачи и выпуска воздуха, и воздух, исходящий из воздушного насоса 11, через воздушный фильтр 13 и воздушную трубку 14 подается в воздушный мешок 9. Объем воздушного мешка 9 постепенно увеличивается, в результате чего держатель веса 4 опускается, противодействуя возвратной силе винтовой пружины 7 приводного штыря 6. То есть, воздушный мешок 9 является приводным элементом, который опускает держатель веса 4, а сам воздушный мешок 9, а также далее упомянутый контейнер, в котором вместо воздуха вызывается перетекание иной текучей субстанции, являются примерами приводного опускающего контейнера (далее называемого "приводным контейнером"), который обуславливает операцию опускания держателя веса 4.
На фиг.3 и фиг.4 показано состояние, при котором держатель веса 4 увеличением объема воздушного мешка 9 опущен до самой нижней части.
Как показано на фиг.3, встроенный вес 5, поддерживаемый держателем веса 4, запирается в приемнике 10 груза, связанном с механизмом измерения нагрузки весового аппарата опусканием держателя веса 4, при этом приемник 10 груза испытывает полную нагрузку от встроенного веса 5. Поэтому к плечу механизма измерения нагрузки приложена полная нагрузка от встроенного веса 5 для проведения калибровки весового аппарата.
Когда калибровка завершена, электромагнитный клапан 12 узла подачи и выпуска воздуха открыт, соединяя воздушный мешок 9 с окружающим воздухом. Соответственно, восстанавливается возвратная сила винтовой пружины, держатель веса под действием этой возвратной силы начинает подъем, находящийся в воздушном мешке 9 воздух выходит наружу через воздушную трубку 14 и электромагнитный клапан 12, открытый в окружающий воздух, а встроенный вес 5, запертый на стороне приемника 10 груза, снова запирается держателем веса 4. Наконец, встроенный вес 5 поднимается в самую высокую часть, что показано на фиг.1 и 2, и фиксируется в этом положении, тем самым возвращая весовой аппарат в режим обычного взвешивания. В этот момент электромагнитный клапан 12 закрывается, подготавливая аппарат к следующей операции калибровки. Позиция 15 обозначает выпускное отверстие, через которое проходит засасываемый и выпускаемый воздух.
Таким образом, в устройстве подъема и опускания встроенного веса по первому варианту исполнения изобретения встроенный вес может быть поднят и опущен увеличением или уменьшением объема воздушного мешка 9 и возвратной силой упругого элемента, такого как винтовая пружина, при этом каждая из этих частей приводится в действие чрезвычайно "мягко" вследствие отсутствия механизма преобразования приводного перемещения, такого как кулачок, и элемента с линейным перемещением, связанного с этим кулачком, и таким образом может быть обеспечена надежная работа в течение длительного времени.
В конфигурации по первому варианту исполнения узел 2 подачи и выпуска воздуха имеет целостное строение, будучи связанным с узлом 1 механизма подъема и опускания встроенного веса. Короче, вышеописанное функционирование может осуществляться до тех пор, пока узел 2 подачи и выпуска воздуха и узел 1 механизма подъема и опускания встроенного веса будут связаны средством подачи воздуха, таким как воздушная трубка 14.
Соответственно, узел 2 подачи и выпуска воздуха может быть образован независимо от узла 1 механизма подъема и опускания встроенного веса, и узел 2 подачи и выпуска воздуха может быть расположен в другой части весового аппарата или же вне основного корпуса весового аппарата.
Второй вариант исполнения
Фиг.5 иллюстрирует устройство подъема и опускания встроенного веса в соответствии со вторым вариантом исполнения настоящего изобретения.
Во втором варианте исполнения операция опускания встроенного веса реализована при свободном опускании встроенного веса под собственной тяжестью.
В конфигурации, показанной на фиг.5, фиксированная часть 3, составляющая основной корпус узла 1 механизма подъема и опускания встроенного веса, прикреплена к верхнему корпусу 20 основного корпуса весового аппарата, а весь узел 1 механизма подъема и опускания встроенного веса подвешен и удерживается верхним корпусом 20. В этот момент воздушный мешок 9 расположен между нижней фиксированной частью 3b и нижней частью держателя веса 4, который поддерживает встроенный вес 5.
Позиция 21 обозначает установленный в держателе веса 4 направляющий цилиндр направляющего штыря. Направляющий штырь 8, выполненный вертикально в нижней фиксированной части 3b, вставлен в направляющий цилиндр 21 направляющего штыря, а держатель веса 4 может подниматься и опускаться вдоль направляющего штыря 8.
В тех случаях, когда весовой аппарат находится в режиме обычного взвешивания, воздушный мешок 9, в отличие от первого варианта исполнения, наполнен воздухом, держатель веса 4 зафиксирован в поднятом положении (положение, показанное на фиг.5), и приемник груза 10 не испытывает нагрузки от встроенного веса 5.
В тех случаях, когда с помощью встроенного веса 5 производится калибровка, воздух из воздушного мешка 9 удаляется, и объем этого воздушного мешка 9 постепенно уменьшается. При уменьшении объема воздушного мешка 9 держатель веса 4, на который помещен встроенный вес 5, опускается под действием собственной тяжести встроенного веса 5 и держателя веса 4, встроенный вес 5, в конечном счете, запирается в приемнике груза 10, а измерительный механизм принимает нагрузку от встроенного веса 5 с приемником груза 10, расположенным между ними, и тем самым выполняет вычисления. По окончании калибровки в воздушный мешок 9 снова нагнетается воздух, встроенный вес 5, запертый в приемнике груза 10, снова запирается держателем веса 4 и поднимается в предопределенное положение. После этого как и в первом варианте исполнения, встроенный вес 5 фиксируется держателем веса 4 и фиксированным элементом, и весовой аппарат входит в режим обычного взвешивания.
Во втором варианте исполнения узел механизма подъема и опускания встроенного веса подвешен и удерживается верхним корпусом 20 весового аппарата. Альтернативно, узел механизма подъема и опускания встроенного веса может быть расположен вертикально на нижней стороне корпуса весового аппарата, а сторона нижней фиксированной части 3b скреплена с нижней стороной корпуса весового аппарата. В первом варианте исполнения, наоборот, узел механизма подъема и опускания встроенного веса, очевидно, может быть подвешен на верхней стороне корпуса весового аппарата.
В первом и во втором вариантах исполнения в качестве приводного механизма воздушного насоса, который подает воздух в воздушный мешок, используется сдвоенный двигатель. Альтернативно, когда узел 2 подачи и выпуска воздуха расположен, будучи отделенным от узла механизма взвешивания, или когда узел 2 подачи и выпуска воздуха расположен снаружи весового аппарата, может использоваться средство подачи воздуха возвратно-поступательного типа, в котором к исполнительному элементу, который в соответствии с частотой переменного тока совершает возвратно-поступательные перемещения, прикреплена диафрагма. Средство подачи воздуха возвратно-поступательного типа чрезвычайно дешево в производстве, хотя при этом, по сравнению с используемым в этих вариантах исполнения сдвоенным двигателем, увеличивается вибрация, обусловленная возвратно-поступательными перемещениями. Поэтому, когда средство подачи воздуха возвратно-поступательного типа размещено в той части в весовом аппарате, на которую вибрация оказывает незначительное влияние, или снаружи весового аппарата, связанные с вибрацией неприятности могут быть исключены, и можно получить недорогой весовой аппарат.
В первом и во втором вариантах исполнения воздушный мешок используется в качестве приводного контейнера, который обуславливает операцию опускания держателя веса 4. Альтернативно, в части, соответствующей узлу 2 подачи и выпуска воздуха, установлен масляный насос, а в область между масляным резервуаром, размещенным на стороне масляного насоса, и контейнером, соответствующим воздушному мешку, для того чтобы изменять объем контейнера, может подаваться и удаляться из него такая текучая среда, как масло. В таких случаях, поскольку этот контейнер и масляный резервуар образуют закрытую систему, устройство подъема и опускания встроенного веса может без труда приводиться в действие даже в особых окружающих условиях, таких как загрязненный воздух и пониженное давление.
Третий вариант исполнения
Фиг.6(А) и 6(В) иллюстрируют устройство подъема и опускания встроенного веса в соответствии с третьим вариантом исполнения настоящего изобретения. В первом и во втором вариантах исполнения увеличение и уменьшение объема воздушного мешка 9, то есть приводного контейнера, особенно увеличение и уменьшение толщины в направлении, перпендикулярном воздушному мешку 9, непосредственно становится расстоянием срабатывания в операции подъема и опускания встроенного веса. То есть, в первом и во втором вариантах исполнения предлагается устройство подъема и опускания встроенного веса прямого привода, в котором используется воздушный мешок 9. С другой стороны, в механизме косвенного привода третьего варианта исполнения, в качестве преобразовательного механизма используется рычажный механизм, а в качестве приводного механизма вместо обычного кулачка используется воздушный мешок, который и приводит в действие рычаг.
На фиг.6(А) и 6(В) на одном конце рычага 30, ось которого расположена между двумя его концами, образован держатель веса 32, то есть удерживающий встроенный вес участок как точка воздействия, а на другом конце, на участке 33 точки усилия размещен воздушный мешок 9. Держатель веса 33 удерживает встроенный вес 5. На фиг.6 вместимость воздушного мешка 9 показана максимальной. На этой стадии участок 33 точки усилия опущен, в то время как держатель веса 32, то есть точка воздействия, поднята в направлении Y, и встроенный вес 5 заперт в держателе веса 32. Поэтому узел механизма 34 измерения нагрузки не испытывает нагрузки от встроенного веса 5, и электронные весы находятся в режиме обычного измерения нагрузки.
В случаях проведения калибровки воздух из воздушного мешка 9 выпускается, чтобы уменьшить объем воздушного мешка 9 способом, подобным тому, который описан в первом или во втором варианте исполнения настоящего изобретения. При уменьшении объема воздушного мешка 9 держатель веса 32 на рычаге 30 под тяжестью встроенного веса 5 опускается в направлении Х, и встроенный вес 5, в конечном счете, помещается на участок приемника груза 10 со стороны механизма 34 измерения нагрузки для выполнения калибровки. По окончании калибровки в воздушный мешок 9 снова нагнетается воздух, и встроенный вес 5 фиксируется в поднятом положении, тем самым электронные весы возвращаются в режим обычного взвешивания.
Четвертый вариант исполнения
Фиг.7 иллюстрирует устройство подъема и опускания встроенного веса в соответствии с четвертым вариантом исполнения настоящего изобретения, который является модификацией третьего варианта исполнения.
На фиг.7 позиция 35 обозначает винтовую пружину, которая поджата таким образом, что создает вертикально направленную силу возврата. Воздушный мешок 9 расположен ниже участка 33 точки усилия рычага 30.
Когда электронные весы находятся в режиме взвешивания, воздушный мешок 9 спущен и имеет минимальную вместимость. Участок 33 точки усилия находится в самой низкой части под действием силы возврата винтовой пружины 35, и поэтому держатель веса 32, расположенный на другом конце рычага 30, находится в самой высокой части, удерживая встроенный вес 5.
В случаях проведения калибровки воздух нагнетается в воздушный мешок 9. Поэтому участок 33 точки усилия поднимается против силы возврата винтовой пружины 35, а держатель веса 32 опускается в направлении Х, и участок приемника груза 10, в конечном счете, принимает нагрузку встроенного веса 5 для выполнения калибровки. По окончании калибровки воздух из воздушного мешка 9 выпускается, и держатель веса 32, удерживающий встроенный вес 5, поднимается, в то время как участок 33 точки усилия снова опускается действием силы возврата винтовой пружины 35, тем самым возвращая электронные весы в режим обычного взвешивания.
Подобным же образом, в четвертом варианте исполнения в качестве активационного вещества вместо воздуха используется текучая среда (жидкость), такая как масло, которая образует замкнутую систему между насосом и жидкостным резервуаром, и электронные весы могут надежно приводиться в действие даже в особых окружающих условиях, таких как загрязненный воздух и пониженное давление.
Промышленная применимость
Устройство подъема и опускания встроенного веса по настоящему изобретению устанавливается в относительно высококачественном весовом аппарате, обладающем высоким разрешением, например в таком, как электромагнитный весовой аппарат балансного типа. Кроме того, устройство подъема и опускания встроенного веса по настоящему изобретению может быть размещено в любом весовом аппарате, в таком как электронные весы емкостного типа, в которых используется датчик нагрузки, или же в таком как электронные весы, в которых калибровка может выполняться электронным способом.

Изобретение относится к области измерительной техники и направлено на уменьшение стоимости и размеров устройства для приложения нагрузки от встроенного веса к механизму измерения нагрузки весового аппарата и ее удаления, повышение надежности работы устройства при упрощении его конструкции, что обеспечивается за счет того, что в устройстве подъема и опускания встроенного веса, которое прикладывает нагрузку от встроенного веса к механизму измерения нагрузки весового аппарата и удаляет ее с него для выполнения калибровки весового аппарата и проведения операций обычного взвешивания, встроенный вес заперт в держателе веса, а держатель веса может подниматься и опускаться по отношению к фиксированной части. Между держателем веса и нижней фиксированной частью расположено упругое тело, а между держателем веса и верхней фиксированной частью расположен приводной контейнер. Причем объем приводного контейнера является изменяемым в соответствии с внутренним содержанием, держатель веса опускается увеличением объема приводного контейнера, а поднимается под действием возвратной силы упругого тела вследствие уменьшения объема приводного контейнера, в соответствии с чем нагрузка от встроенного веса непосредственно прикладывается к механизму измерения нагрузки и удаляется с него изменением объема приводного контейнера. 4 н. и 8 з.п. ф-лы, 8 ил.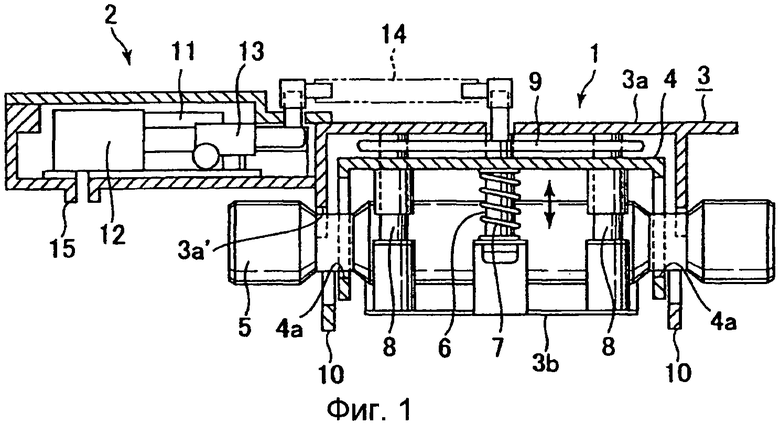
1. Устройство подъема и опускания встроенного веса, которое прикладывает нагрузку от встроенного веса к механизму измерения нагрузки весового аппарата и удаляет ее с него для выполнения калибровки весового аппарата и проведения операций обычного взвешивания, в котором встроенный вес удерживается держателем веса, который может вертикально смещаться, в держателе веса расположен приводной контейнер, причем объем приводного контейнера является изменяемым в соответствии с внутренним содержанием, держатель веса поднимается и опускается изменением объема приводного контейнера, а нагрузка от встроенного веса прикладывается к механизму измерения груза весового аппарата и удаляется с него операциями подъема и опускания держателя веса.
2. Устройство подъема и опускания встроенного веса, которое прикладывает нагрузку от встроенного веса к механизму измерения нагрузки весового аппарата и удаляет ее с него для выполнения калибровки весового аппарата и проведения операций обычного взвешивания, в котором встроенный вес заперт в держателе веса, держатель веса может подниматься и опускаться по отношению к фиксированной части, между держателем веса и нижней фиксированной частью расположено упругое тело, а между держателем веса и верхней фиксированной частью расположен приводной контейнер, причем объем приводного контейнера является изменяемым в соответствии с внутренним содержанием, держатель веса опускается увеличением объема приводного контейнера, а держатель веса поднимается под действием возвратной силы упругого тела вследствие уменьшения объема приводного контейнера, в соответствии с чем нагрузка от встроенного веса непосредственно прикладывается к механизму измерения нагрузки и удаляется с него изменением объема приводного контейнера.
3. Устройство подъема и опускания встроенного веса, которое прикладывает нагрузку от встроенного веса к механизму измерения нагрузки весового аппарата и удаляет ее с него для выполнения калибровки весового аппарата и проведения операций обычного взвешивания, в котором встроенный вес заперт в держателе веса, держатель веса может подниматься и опускаться по отношению к фиксированной части, между держателем веса и нижней фиксированной частью расположен приводной контейнер, причем объем приводного контейнера является изменяемым в соответствии с внутренним содержанием, держатель веса поднимается увеличением объема приводного контейнера, а встроенный вес и держатель веса, в котором этот встроенный вес заперт, опускаются под действием собственной тяжести вследствие уменьшения объема приводного контейнера, в соответствии с чем нагрузка от встроенного веса непосредственно прикладывается к механизму измерения нагрузки и удаляется с него изменением объема приводного контейнера.
4. Устройство по п.2, в котором держатель веса поднимается и опускается вдоль направляющего штыря, который размещен между верхней и нижней фиксированными частями, и по меньшей мере в одном из штырей расположена винтовая пружина, а этот штырь вставлен в эту винтовую пружину, причем эта винтовая пружина является тем упругим телом, которое выполняет операцию подъема держателя веса.
5. Устройство по любому из пп.1-3, в котором приводной контейнер выполнен как воздушный мешок, в который нагнетается воздух, воздушный мешок подсоединен к части подачи и вывода воздуха воздухопроводящим средством, таким как воздушная трубка, и объем воздушного мешка увеличивается и уменьшается подачей воздуха от подвода воздуха и выпуска воздуха в выпускную часть.
6. Устройство по любому из пп.2-4, в котором запорный участок образован в верхней части фиксированной части, и встроенный вес зафиксирован верхней частью фиксированной части, а держатель веса, когда держатель веса запирает встроенный вес, находится в самом верхнем положении.
7. Устройство по п.5, в котором узел подачи и вывода воздуха образован независимо от узла механизма подъема и опускания встроенного веса, узел механизма подъема и опускания встроенного веса включает воздушный мешок, фиксированную часть и держатель веса, а независимо образованная часть подачи и вывода воздуха и узел механизма подъема и опускания встроенного веса связаны воздушной трубкой.
8. Устройство по любому из пп.1-3, в котором приводной контейнер образован таким образом, что в него втекает жидкость, такая как масло, этот приводной контейнер связан с жидкостным резервуаром через жидкостной насос, такой как масляный насос, а жидкость перемещается между приводным контейнером и жидкостным резервуаром жидкостным насосом для увеличения и уменьшения объема этого приводного контейнера.
9. Устройство по любому из пп.2-4, в котором фиксированная часть прикреплена к стороне верхнего корпуса весового инструмента, а весь узел механизма подъема и опускания встроенного веса подвешен и удерживается верхним корпусом.
10. Устройство подъема и опускания встроенного веса, которое прикладывает нагрузку от встроенного веса к механизму измерения нагрузки весового аппарата и удаляет ее с него для выполнения калибровки весового аппарата и проведения операций обычного взвешивания, содержащее приводной контейнер, объем которого может изменяться в соответствии с внутренним содержанием, и преобразовательный механизм, который преобразовывает изменение объема приводного контейнера в операцию подъема и опускания встроенного веса, при этом нагрузка от встроенного веса опосредованно прикладывается к механизму измерения нагрузки и удаляется с него изменением объема приводного контейнера через преобразовательный механизм.
11. Устройство по п.10, в котором преобразовательный механизм является рычажным механизмом, встроенный вес заперт в держателе груза, расположенном в точке воздействия рычажного механизма; приводной контейнер, объем которого может изменяться, размещен на участке точки усилия, который расположен напротив держателя груза относительно оси;
держатель груза находится в поднятом положении вследствие увеличения объема приводного контейнера, и держатель груза, когда объем приводного контейнера уменьшен, опущен на приемник груза механизма измерения нагрузки под действием нагрузки от встроенного веса.
12. Устройство по п.11, в котором на участке точки усилия рычажного механизма расположено упругое тело, это упругое тело подперто таким образом, что участок точки усилия опущен воздействием возвратной силы упругого тела, приводной контейнер расположен таким образом, что обращен к упругому телу относительно участка точки усилия, участок точки усилия увеличением объема приводного контейнера поднят против силы упругости упругого тела, и участок точки усилия опущен силой упругости упругого тела в соответствии с уменьшением объема приводного контейнера для приложения и удаления встроенного веса.
| JP 7139992 А, 02.06.1995 | |||
| JP 2001153749 А, 08.06.2001 | |||
| US 6539771 В1, 01.04.2003 | |||
| JP 57189025 A, 20.11.1982 | |||
| US 2006161386 A1, 20.07.2006 | |||
| УСТРОЙСТВО ДЛЯ ПОВЕРКИ ВЕСОВ | 1992 |
|
RU2082113C1 |

