Изобретение относится к области измерительной техники и может быть использовано в приборостроении и машиностроении для измерения механических напряжений.
Известен чувствительный элемент для измерения механических напряжений, представляющий собой линию задержки на поверхностных акустических волнах (ПАВ) (Wireless passive SAW identification marks and sensors. L. Reindl, 2-nd Int. Symp. Acoustic wave devices for future mobile communicstion systems, Chiba univ., 2004), состоящий из двух встречно-штыревых преобразователей (ВШП), расположенных на пьезоплате напротив друг друга. Период следования штырей в ВШП равен  , λ - длина поверхностной акустической волны, скважность равна 2. В качестве информационного сигнала используется время задержки. Недостатком этого чувствительного элемента для измерения механических напряжений является низкая чувствительность и точность измерения.
, λ - длина поверхностной акустической волны, скважность равна 2. В качестве информационного сигнала используется время задержки. Недостатком этого чувствительного элемента для измерения механических напряжений является низкая чувствительность и точность измерения.
Известен также чувствительный элемент для измерения механических напряжений, представляющий собой одновходовый резонатор (Зеленка И. Пьезоэлектрические резонаторы на объемных и поверхностных акустических волнах. М: Мир, 1990, 584 с.), состоящий из ВШП структуры и расположенных по обе стороны от ВШП металлизированных штыревых отражающих структур. Период следования штырей в отражающих структурах равен  , λ - длина поверхностной акустической волны, скважность равна 2. В качестве информационного сигнала используется собственная (резонансная) частота резонатора. Недостатком этого чувствительного элемента для измерения механических напряжений является малая девиация частоты и, как следствие, низкая чувствительность и точность измерения.
, λ - длина поверхностной акустической волны, скважность равна 2. В качестве информационного сигнала используется собственная (резонансная) частота резонатора. Недостатком этого чувствительного элемента для измерения механических напряжений является малая девиация частоты и, как следствие, низкая чувствительность и точность измерения.
Наиболее близким по технической сущности к изобретению является чувствительный элемент для измерения механических напряжений, представляющий собой дисперсионную линию задержки (Wireless passive SAW identification marks and sensors. L. Reindl, 2-nd Int. Symp. Acoustic wave devices for future mobile communicstion systems, Chiba univ., 2004), выбранный в качестве прототипа. Устройство-прототип состоит из ВШП и расположенных на пьезоплате с одной стороны от ВШП отражающих структур, выполненных в виде системы канавок с переменным периодом, образующих дисперсионную структуру. В качестве информационного параметра сигнала используется время задержки. Недостатком этого чувствительного элемента для измерения механических напряжений является малая девиация информационного сигнала и, как следствие, низкая точность измерения.
Причиной, препятствующей получению указанного ниже технического результата при использовании устройства-прототипа, является следующий его недостаток: абсолютное значение девиации времени задержки ограничено геометрическими размерами пьезоплаты и потерями на распространение ПАВ в материале.
Задачей настоящего изобретения является повышение чувствительности и точности измерения механических напряжений.
Сущность изобретения заключается в том, что в чувствительном элементе для измерения механических напряжений, состоящем так же, как и в прототипе, из пьезоплаты, встречно-штыревого преобразователя (ВШП) сигналов из запросной последовательности сигналов различных типов и отражающих структур (ОС), в отличие от прототипа ОС состоят из групп отражателей, выполненных в виде канавок или штырей, расположенных по обе стороны от ВШП. При этом топологии ОС и отражатели в каждой группе расположены геометрически так, что при возникновении механических напряжений на поверхности пьезоплаты в момент поступления на ВШП отраженных от групп отражателей сигналов изменение фазы для не менее чем одного типа сигнала из запросной последовательности сигналов, отраженного от группы отражателей, имеющей максимальный коэффициент отражения для данного сигнала, будет отличаться не менее чем на 150 град. и не более чем на 210 град. от изменения фазы не менее чем одного другого типа сигнала из запросной последовательности импульсов, поступившего на ВШП, но отраженного от других групп отражателей, имеющих максимальный коэффициент отражения для указанного другого типа сигнала.
Сущность изобретения поясняется чертежами, где:
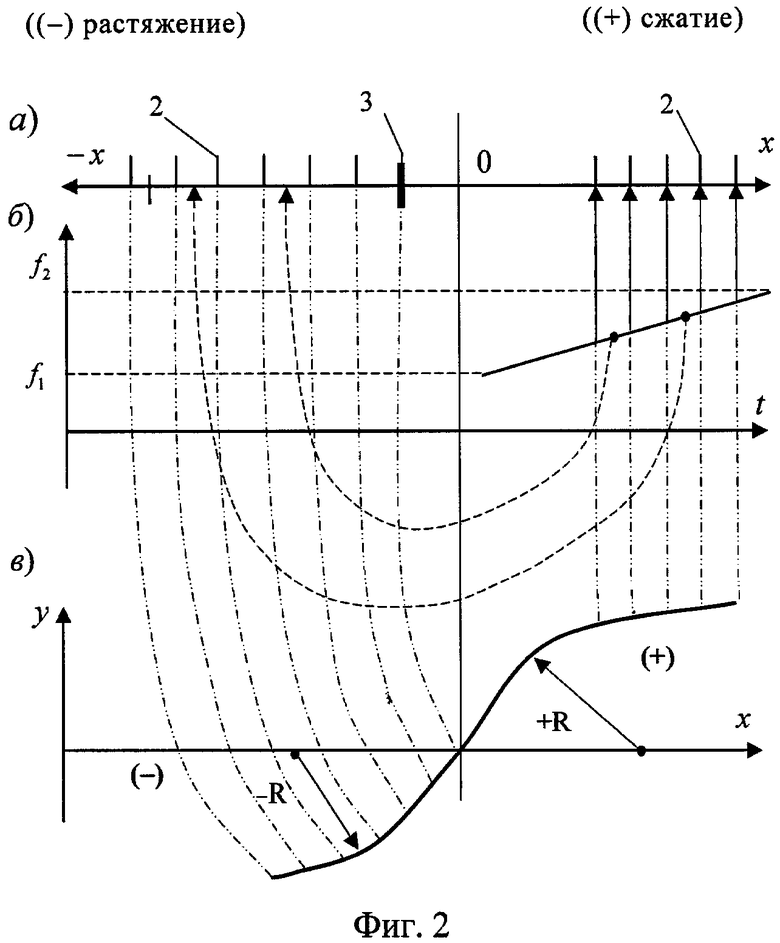
на фиг.1 - приведена структура чувствительного элемента для измерения механических напряжений, где
1 - пьезоплата
2 - отражающие структуры (ОС)
3 - встречно-штыревые преобразователи (ВШП);
на фиг.2 - приведена схема изменения параметров структуры чувствительного элемента для измерения механических напряжений, где
а - схема расположения групп отражающих структур
б - график изменения частоты сигнала от времени
в - эпюра распределения механических напряжений.
Чувствительный элемент для измерения механических напряжений (фиг.1) состоит из пьезоплаты 1, на которой сформированы отражающие структуры (ОС) 2 и встречно-штыревые преобразователи (ВШП) 3.
ОС 2 могут быть выполнены, например, в виде системы канавок с переменным периодом (неэквидистантные канавки). Пьезоплата 1 может быть выполнена из пьезоэлектрического материала (например, кварца).
ОС 2 расположены с двух сторон от ВШП 3, при этом ОС 2 состоят из групп отражателей, выполненных в виде канавок или штырей, расположенных по обе стороны от ВШП. При этом топологии ОС и отражатели в каждой группе расположены геометрически так, что при возникновении механических напряжений на поверхности пьезоплаты 1 в момент поступления на ВШП 3 отраженных от групп отражателей сигналов изменение фазы для не менее чем одного типа сигнала из запросной последовательности сигналов, отраженного от группы отражателей, имеющей максимальный коэффициент отражения для данного сигнала, будет отличаться не менее чем на 150 град. и не более чем на 210 град. от изменения фазы не менее чем одного другого типа сигнала из запросной последовательности импульсов, поступившего на ВШП, но отраженного от других групп отражателей, имеющих максимальный коэффициент отражения для указанного другого типа сигнала.
Формирование ВШП реализовано по технологии фотолитографии и травления [1, 2]. Формирование канавок ОС 2 реализовано по технологии травления через маску [2].
Устройство работает следующим образом.
При отсутствии механических напряжений на поверхности пьезоплаты 1 устройство работает как согласованный фильтр для опорной последовательности сигналов [3].
В качестве зондирующего сигнала могут быть использованы частотно модулированные сигналы, структура которых соответствует топологии отражающих структур 2 [2]. При изменении топологии ОС 2 будет изменяться и структура соответствующих частотно модулированных сигналов. Наиболее часто используются линейно-частотно модулированные сигналы [2].
При поступлении зондирующего сигнала от внешнего источника (на фиг.1 не показано) на ВШП 3, под действием пьезоэлектрического эффекта формируется ПАВ. Сформированная ВШП 3 ПАВ распространяется в двух направлениях от ВШП 3. Дойдя до отражающих структур 2, ПАВ отражается и возвращается на ВШП 3. Расположение отражающих структур 2 с двух сторон от ВШП 3 позволяет использовать в два раза больше акустической энергии по сравнению с односторонним расположением отражающих структур, т.е. в два раза увеличить амплитуду отклика чувствительного элемента механических напряжений. Взаимодействие зондирующего ЛЧМ сигнала с отражающими структурами подробно объясняется в [2].
При этом, например, частота запросного сигнала может изменяться от частоты f1 до частоты f2, как показано на фиг.2,б.
При возникновении механических напряжений, например под действием давления, или деформации, на поверхности пьезоплаты 1 изменяется геометрический размер штырей (электродов) ВШП 3, расстояния между электродами, ширина и период следования канавок ОС 2. На фиг.2 схематично показаны радиусы кривизны R при возникновении положительных и отрицательных механических напряжений на поверхности пьезоплаты 1. При этом по одну сторону от ВШП 3 в пьезоплате механическое напряжение и соответственно изменение скорости распространения ПАВ и изменение фазы отраженного сигнала, будет иметь один знак, например положительный, соответствующий увеличению фазы. По другую сторону от ВШП 3 механическое напряжение и соответственно изменение скорости распространения ПАВ и изменение фазы отраженного сигнала будет иметь другой знак, например отрицательный, соответствующий уменьшению фазы.
В соответствии с изменением геометрических размеров [1, 2] изменяются частотные свойства ОС 2 и фаза отраженного от ОС 2 сигнала.
Соответствующее предложенной структуре изменение фазы приведет, как было показано выше, к изменению амплитуды сжатого сигнала.
При возникновении механических напряжений амплитуда сжатого сигнала будет уменьшаться, при этом максимально возможное уменьшение будет достигнута при изменении фазы на соседних участках до величины 180 град. При этом изменение амплитуды сжатого сигнала будет однозначной функцией механических напряжений.
Форма, или в частном случае амплитуда сжатого сигнала, измеряется, например, по амплитудно-частотной характеристике (например, с использованием сетевого анализатора Agilent E5070B) [2]. На основе градуировочной зависимости (форма, амплитуда - механическое напряжение) изменению формы (амплитуды) сжатого сигнала можно соотнести величину механических напряжений.
Расположение отражающих структур с двух сторон от ВШП позволяет использовать в два раза больше акустической энергии по сравнению с односторонним расположением отражающих структур.
Оценим изменение фазы (фазовый сдвиг) частотомодулированного сигнала на соседних участках ОС. Соседними участками будем называть отрезки ОС и соответствующие этим отрезкам ОС части частотомодулированного сигнала, непосредственно примыкающие по времени друг к другу. Наиболее часто используются линейно-частотно-модулированные (ЛЧМ) сигналы.
Случай линейной деформации приводит к пропорциональному сдвигу частот ωl=kω.
При этом коэффициент k не превышает 0,001. Таким образом, изменение частоты, например, для ЛЧМ сигнала приводит фактически к изменению только начального и конечного участка сигнала и временному сдвигу. Эти изменения касаются соответственно только одной тысячной части по полосе и по длительности сигнала. Таким образом, более чем 99% протяженности ЛЧМ сигнала не будут иметь фазовых сдвигов на соседних участках сигнала.
Для предлагаемой топологии (фиг.1) и для показанного на фиг.2 типа изменения механических напряжений фазовые сдвиги на соседних участках будут составлять до 0,002φn(τ). Здесь φn(τ) - номинальное значение фазы исходного сигнала в данный момент времени.
Средние искажения фазы можно оценить для момента времени равного половине длительности сигнала. Для частоты 1 ГГц и длительности 3 мкс искажения превысят 2π.
Такое искажение фазовой характеристики и приводит к существенной деформации сжатого сигнала даже при незначительном искажении амплитудно-частотной характеристики.
При деформации, показанной на фиг.2, изменение (приращение) фазы изменяется монотонно (с одной стороны от ВШП - уменьшается, с другой стороны - увеличивается).
Для наиболее удаленной от ВШП точки ОС наибольшие фазовые изменения будут на наиболее высокой частоте.
Одновременно учитывается, что в силу периодичности сигнала (несущая частота является синусоидой) изменения фазы более чем на 180 град не приводят к большему изменению амплитуды сжатого сигнала.
В силу этого оценим чувствительность чувствительного элемента при изменении фазы на 180 град на всем протяжении ОС. Этому условию удовлетворяют структуры, имеющие для наиболее удаленных от ВШП отражающих структур, топологию, соответствующую более низкой частоте. Изменение частоты, соответствующее изменению фазы при деформации вдоль ОС, составляет не более 0,1% или не более чем 0,5% для самого чувствительного среза. Для увеличения полосы (девиации) можно для каждой из групп ОС дискретно менять частоты (увеличивая или уменьшая) при условии φ(τ)=π на всей ОС.
Оценим чувствительность чувствительного элемента с предложенной топологией к механическим напряжениям. Рассмотрим упрощенный вариант топологии - топологию с эквидистантными ОС. Такая топология соответствует импульсу с узкой полосой частот (например, прямоугольному радиоимпульсу большой длительности Т), т.е. передаваемый на датчик сигнал имеет постоянную амплитуду на достаточно большом интервале времени (для единичной амплитуды)

где T - длительность импульса.
В случае согласованной фильтрации выходной сигнал [3]
Импульсная переходная функция согласованного фильтра может быть аппроксимирована выражением
Будем считать, что в интервале ненулевых значений функций S1(t) и S2(t) укладывается целое число периодов, т.е. T=2πn, где n - любое целое число. Тогда формулу (1) на интервале  можно представить в виде
можно представить в виде

Формула (2) соответствует свертке двух высокочастотных радиоимпульсов, имеющих огибающие линии в виде прямоугольников. При этом огибающая линия сигнала, полученного в результате операции свертки (2), имеет вид ромба с максимальным по модулю значением А.
Изменение формы огибающих линий с прямоугольной на ромбовидную в радиотехнике рассматривается как проявление эффекта сжатия огибающих двух исходных сигналов [3].
Оценим изменение амплитуды сжатого сигнала (2) при внешнем воздействии, приводящем к изменению фазы сигнала на π/2.
В случае предлагаемой топологии по одну сторону от ВШП фаза сигнала будет увеличиваться (изменяться на +π/2), а по другую сторону от ВШП - уменьшаться (изменяться на -π/2). Таким образом, разность фаз соседних участков импульсной переходной характеристики при внешнем воздействии составит π (180 град.).
Пусть ОС разнесены на N=24 группы (по 12 групп с каждой стороны от ВШП). Тогда увеличение амплитуды f(t) будет происходить до момента времени
Tp=T/N=T/24.
Следующая группа ОС обеспечит сдвиг сигнала на π на интервале
t∈[Tp,2Tp]
и к моменту времени 2Tp сигнал f(t) будет уменьшаться
В рассматриваемом случае Т пропорционально целому числу n периодов. При достаточно большом количестве групп ОС с приемлемой погрешностью можно считать, что и Tp также содержит целое число периодов.
Для реальных ОС количество периодов, соответствующих одной группе ОС, не будет меньше пяти. Поэтому погрешность предположения о целом количестве периодов не будет превышать 20%.
В случае равенства Tp целому количеству периодов результат вычислений по формуле (3) полностью определяется значением на интервале [0, 2π]
Если число используемых групп ОС равно N=24, амплитуда сжатого сигнала при деформации, вызывающей сдвиг фазы на π/2, не превысит A/N=A/24. При наличии механических напряжений в предложенной структуре значение амплитуды сигнала относительно ее значения, соответствующего отсутствию деформации, составит не более минус 20 дБ.
В известных ПАВ-датчиках [4] изменение амплитуды достигает 7 раз. Предложенная конструкция, как показано выше, позволяет изменять амплитуду более чем в 10 раз, а в простейшем случае в 24 раза, что обеспечивает за счет расширения диапазона изменения параметра (амплитуды) пропорциональное увеличение точности.
Источники информации
1. Зеленка И. Пьезоэлектрические резонаторы на объемных и поверхностных акустических волнах. М.: Мир, 1990, 584 с.
2. Морган Д. Устройства обработки сигналов на поверхностных акустических волнах / Пер. с англ. М.: Радио и связь, 1990, 416 с.
3. Кук Ч., Бернфельд М. Радиолокационные сигналы. Теория и применение. М.: Советское радио, 1971 г., 568 с.
4. Багдасарян, Днепровский В., Карапетьян Г., Нефедова П., Синицина Т. ПАВ-датчики дистанционного контроля физических величин. Электроника: Наука, Технология, Бизнес, №1, 2008, с.46-51.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ | 2011 |
|
RU2457450C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 2012 |
|
RU2494358C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДЕФОРМАЦИИ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2012 |
|
RU2487326C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 2015 |
|
RU2590228C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ ЖИДКОСТЕЙ И ГАЗОВ | 2017 |
|
RU2658596C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЕФОРМАЦИИ С ДИСПЕРСИОННЫМИ СТРУКТУРАМИ | 2008 |
|
RU2396526C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 2015 |
|
RU2592055C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ | 2010 |
|
RU2422774C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЗАПРОСНОГО СИГНАЛА ДЛЯ ДАТЧИКА НА ПАВ С ОТРАЖАЮЩИМИ СТРУКТУРАМИ | 2012 |
|
RU2488921C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДАТЧИКА ФИЗИЧЕСКИХ ВЕЛИЧИН С ОТРАЖАЮЩИМИ СТРУКТУРАМИ | 2009 |
|
RU2393444C1 |
Чувствительный элемент для измерения механических напряжений относится к области измерительной техники и может быть использован в приборостроении и машиностроении для измерения механических напряжений. Технический результат - повышение чувствительности и точности измерения механических напряжений. Чувствительный элемент для измерения механических напряжений состоит из пьезоплаты, встречно-штыревого преобразователя (ВШП) сигналов из запросной последовательности сигналов различных типов и отражающих структур (ОС). ОС состоят из групп отражателей, выполненных в виде канавок или штырей, расположенных по обе стороны от ВШП, при этом топологии ОС и отражатели в каждой группе расположены геометрически так, что при возникновении механических напряжений в пластине пьезоэлектрика в момент поступления на ВШП отраженных от групп отражателей сигналов изменение фазы для не менее чем одного типа сигнала из запросной последовательности сигналов, отраженного от группы отражателей, имеющей максимальный коэффициент отражения для данного сигнала, будет отличаться не менее чем на 150 град, и не более чем на 210 град, от изменения фазы не менее чем одного другого типа сигнала из запросной последовательности импульсов, поступившего на ВШП, но отраженного от других групп отражателей, имеющих максимальный коэффициент отражения для указанного другого типа сигнала. 2 ил.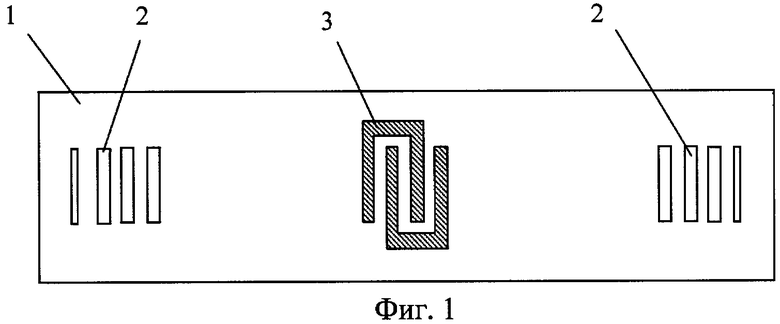
Чувствительный элемент для измерения механических напряжений, состоящий из пьезоплаты, встречно-штыревого преобразователя (ВШП) сигналов из запросной последовательности сигналов различных типов и отражающих структур (ОС), отличающийся тем, что ОС состоят из групп отражателей, выполненных в виде канавок или штырей, расположенных по обе стороны от ВШП, при этом топологии ОС и отражатели в каждой группе расположены геометрически так, что при возникновении механических напряжений на поверхности пьезоплаты в момент поступления на ВШП отраженных от групп отражателей сигналов изменение фазы для не менее чем одного типа сигнала из запросной последовательности сигналов, отраженного от группы отражателей, имеющей максимальный коэффициент отражения для данного сигнала, будет отличаться не менее чем на 150° и не более чем на 210°, от изменения фазы не менее чем одного другого типа сигнала из запросной последовательности импульсов, поступившего на ВШП, но отраженного от других групп отражателей, имеющих максимальный коэффициент отражения для указанного другого типа сигнала.
| Датчик силы | 1980 |
|
SU917007A1 |
| ФИЛЬТР НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2006 |
|
RU2340080C2 |
| ДАТЧИК ДИСТАНЦИОННОГО КОНТРОЛЯ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2004 |
|
RU2296950C2 |
| US 6810750 B1, 02.11.2004 | |||
| JP 61234324 A, 18.10.1986. | |||

